Embed Size (px)
DESCRIPTION
a
Citation preview

0 - 0 - 11
© 2007 Texas Instruments Inc,
Content developed in partnership with Tel-Aviv University
From MATLAB® and Simulink® to Real Time with TI DSPs
Sensored Field Oriented Control of a Permanent
Magnet Synchronous Motor (PMSM)

Slide Slide 22© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Learning objectives
• Review of Electromagnetic laws
• Rotating magnetic fields
• Structure of synchronous motors
• Features of synchronous motors
• BLDC and PMSM synchronous motor types
• BLDC and PMSM control overview
• Electro-mechanical parameters for a synchronous motor

Slide Slide 33© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Field generated by a current
IField
I
I
• A conductor carrying a current produces a magnetic field around it.
• A conductor that is wound into a coil produces a magnetic field along the axis of the coil.
• The flux produced is proportional to the current through the coil and the number of turns in the coil.
B = k*n*I

Slide Slide 44© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
The Current in a Coil
• A coil carrying a current, placed in a magnetic field experiences a force that will cause it to rotate.
• This force is given as the vector cross product of the flux produced by the coil and the flux that is impressed by the external magnetic field.
IB1
B2F2
F1
d
dB2 B1 T
B2 x B1 F2 F1

Slide Slide 55© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Back EMF generation
Magnet rotating in front of winding “a” create an inductive voltage between A and B, e = VA-VB called Bemf (Back electromotive force)
Magnetic flux seen by the winding is given by: Bemf is then equal to:
t cos2
2
)sin()sin(2)(
E
tEtdt
dte
S
N
e
a
AB
)/( srad
Magnet flux

Slide Slide 66© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Pole pairs
N
S
N
S
S
N
For a motor with p poles pairs we have
with )sin()( tEte
p
1 pole pair 2 pole pairs
is the electrical frequency (rad/s)
is the mechanical frequency (rad/s) or simply the speed of the machine.
2 with )sin()( tEte
e e
N
N

Slide Slide 77© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Three phases winding
For most three phase machines, the winding is stationery, and magnetic field is rotating
Three phase machines have three stator windings, separated 120° apart physically
Three phase stator windings produce three magnetic fields, which are spaced 120°in time
3
4
3
2
.
.
.
tj
Sc
tj
Sb
tjsa
eIi
eIi
eIi
3
4
3
2
.
.
.
tjp
c
tjp
b
tjpa
eEe
eEe
eEe
N
S a
c
b
ia
ic
ib

Slide Slide 88© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Application to Three Phases MachineOperation Fundamentals
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
1 24 47 70 93 116 139 162 185 208 231 254 277 300 323 346 t
ia ib icPhase currents
A`
A
Fa
B
C`
C
B`
ia
Fb
Fc
Three stationary pulsating magnetic fields
The three phase winding produces three magnetic fields, which are spaced 120° apart physically.
When excited with three sine waves that are a 120° apart in phase, there are three pulsating magnetic fields.
The resultant of the three magnetic fields is a rotating magnetic field.

Slide Slide 99© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Synchronous operation
Three phase AC current
Phase 1
Coil 1
Phase 2
Coil 2
Phase3
Coil 3
Three phase AC current
Phase 1
Coil 1
Phase 2
Coil 2
Phase3
Coil 3
Three phase AC current
Phase 1
Coil 1
Phase 2
Coil 2
Phase3
Coil 3
Three phase AC current
Phase 1
Coil 1
Phase 2
Coil 2
Phase3
Coil 3
Three phase AC current
Phase 1
Coil 1
Phase 2
Coil 2
Phase3
Coil 3
Three phase AC current
Phase 1
Coil 1
Phase 2
Coil 2
Phase3
Coil 3

Slide Slide 1010© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Rotor is carrying a constant magnetic field created either by permanent magnets or current fed coils
The interaction between the rotating stator flux, and the rotor flux produces a torque which will cause the motor to rotate.
The rotation of the rotor in this case will be at the same exact frequency as the applied excitation to the rotor.
This is synchronous operation.
Rotor fieldA`
B
C`
AB`
C N
S
F
F Stator field
S
N
Theory of operation:
phaseper pair polesmotor :p
(Hz)frequency supply AC :
(r.pm) .60
:(rad/s) speedRotor
f
p
fgives
p
Example: a 2 poles pair
synchronous motor will run at 1500 r.pm for a 50Hz AC supply frequency

Slide Slide 1111© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Electromechanical Parameters
vestator
uL
i
Simplified equivalent electrical scheme of a winding of a three phases synchronous motor
Note: stator resistance neglected
I
V
uL
Es
)/( speedrotation motor :
)(current phase :
)( voltagephase :
).( torquehanicalelectromec :
cos3
srad
II
VV
mNT
VIT
em
em

Slide Slide 1212© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Synchronous Motor Rotor Construction
non-salient rotor pole (p=1)
non-salient rotor pole (p=2)
salient rotor pole (p=2)

Slide Slide 1313© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
• Both (typically) have permanent-magnet rotor and a wound stator
• BLDC (Brushless DC) motor is a permanent-magnet brushless motor with trapezoidal back EMF
• PMSM (Permanent-magnet synchronous motor) is a permanent-magnet brushless motor with sinusoidal back EMF
300 900 1500 2100 2700 3300 300 900
60000 1200 1800 2400 3000 3600 600
Phase A
Phase B
Phase C
ia
ib
ic
e
e
e
Ea
Hall A
Hall B
Hall C
Back EMF of BLDC Motor
-1.50
-1.00
-0.50
0.00
0.50
1.00
1.50
1 24 47 70 93 116 139 162 185 208 231 254 277 300 323 346t
ea eb ec
Back EMF of PMSM
A`
B
C`
AB`
C
S
F
F
Synchronous machine classification: BLDC and PMSM
N

Slide Slide 1414© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
BLDC vs. PMSM
BLDC
• Synchronous machine
• Fed with direct currents
• Trapezoidal BEMF
• Stator Flux position commutation each 60 degrees
• Only two phases ON at the same time
• Torque ripple at commutations
PMSM
• Synchronous machine
• Fed with sinusoidal currents
• Sinusoidal BEMF
• Continuous stator flux position variation
• Possible to have three phases ON at the same time
• No torque ripple at commutations

Slide Slide 1515© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Conclusion• Synchronous motors use magnetic interaction
to convert electrical energy to mechanical.
• Rotor must be synchronized with the rotating stator magnetic field in order to produce torque
• Pole pair numbers and excitation frequency determine the mechanical rotation speed
• Synchronous motors are classified in two categories: BLDC and PMSM
• Each type require an appropriate control

Slide Slide 1616© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
PMSM Control
• Synchronous Motors such as PM motors and SynRMs are getting more popular because of their high power density and high efficiency
• PM Assisted SynRM uses advantages of both PM and Reluctance motor
• The vector control strategy is far more complicated than control of a DC motor requiring use of multiple control loops

Slide Slide 1717© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
PI
PI
PI
SV
PWM3-phaseInverter
PMASynRM
abc
-
i -
-
Vdc
ClarkeTransformation
ParkTransformation
Inv. ParkTransformation
r
+ +
+
Mechanical Speed andposition of rotor
dse*
iqse* vqs
e*
vdse*
vqss*
vdss*
idss
iqss
idse
iqse
dqss
dqse
dqse
dqss
dqss
ref
Control System Block-Diagram
Slide Slide 1818© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
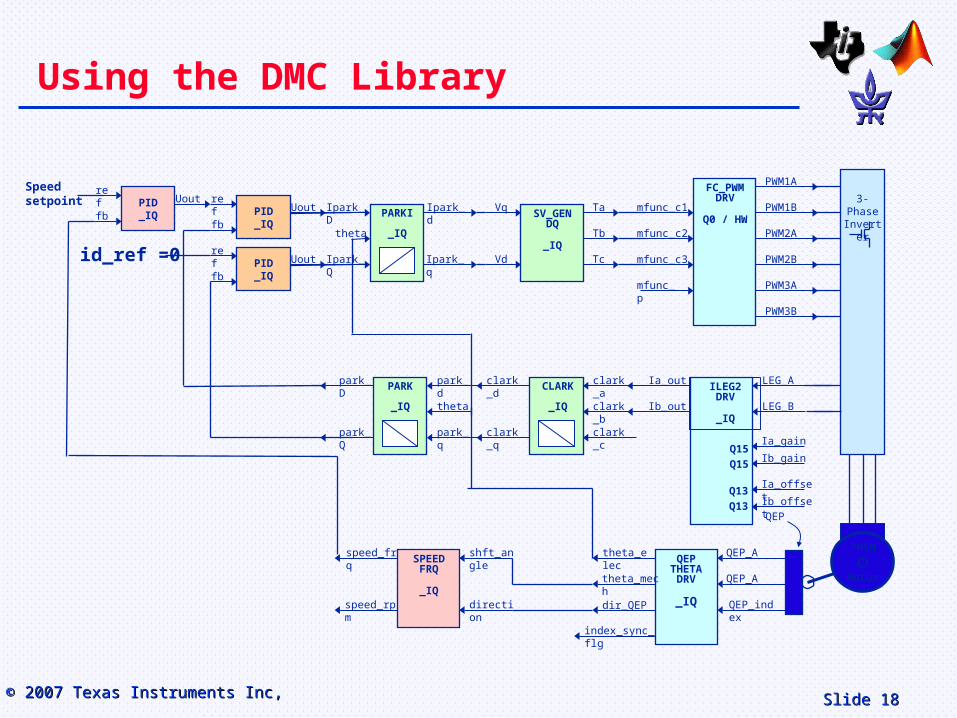
Using the DMC Library
3-PhaseInverter
QEP
SV_GENDQ
_IQ
Vq
Vd
Ta
Tb
Tc
PARKI
_IQ
Ipark_D
Ipark_Q
theta
Ipark_d
Ipark_q
CLARK
_IQ
clark_a
clark_b
clark_c
clark_d
clark_q
PARK
_IQ
park_d
park_q
theta
park_D
park_Q
PID_IQ
ref
fb
Uout
PID_IQ
ref
fb
Uout
PID_IQ
ref
fb
UoutSpeedsetpoint
id_ref =0
QEPTHETA
DRV
_IQ
QEP_Atheta_elec
theta_mech
dir_QEP
index_sync_flg
QEP_A
QEP_index
SPEEDFRQ
_IQ
shft_angle
direction
speed_frq
speed_rpm
FC_PWMDRV
Q0 / HWmfunc_c1
PWM1A
PWM1B
PWM2A
PWM2B
PWM3A
PWM3B
mfunc_c2
mfunc_c3
mfunc_p
ILEG2DRV
_IQ
Ia_out
Ib_out
LEG_A
LEG_B
Ia_gain
Ib_gain
Ia_offset
Ib_offset
Q15
Q15
Q13
Q13
PMSM
Motor

Slide Slide 1919© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
The Equivalent Simulink® Model
TMS320F28x controller
vas*
vbs*
Inv. Park
SpaceVector
Gen.
Ta
Tb
Tc
PMSM
ias
ibs
Ileg2_Bus
Driver
ADCIN1
ADCIN2
ADCIN3ibsPark Clarke
ias
QEP_ASMOSPDspeed
estimationdir
vqs*
vds*
PIiqs
*
PI
qlr
vds*
PI
qlrwr
iqs
Encoder
QEP_B
QEP_inc
qm
PWM1
PWM2
PWM3
PWM4
PWM5
PWM6
ids
ids*
RampGen.
QEPdriver
PWMDriver
VoltageSourceInverter

Slide Slide 2323© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Hardware Setup
Per
man
ent
Mag
net
S
ynch
ron
ou
s M
oto
r
Encoder
+-
220V
Power Supply24 Volts 4 Amps
Power Supply5V
2 Power inputs:
•5V PSU for the DSP board only (software debug)
•0 - 24V PSU for the power stage
P3 P4 P5
analog I/OP6
P7
eZdsp 2812
DMC 550P
arallel Po
rt
Motor phases
Encoder signal

Slide Slide 2424© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Synchronous Reluctance Motor
Two pole singly salient SynRM
Two pole doubly salient Switched RM

Slide Slide 2525© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
dsrqs
qssq
qsrds
dssd
dt
dirv
dt
dirv
mqsqsmqsmqqslsqs
dsdsdsmddslsds
iLiLiL
iLiLiL
dsqsqsdse iiP
T 22
3
qsdsqsdse IILLP
T )(22
3
sin
cos
sqs
sds
II
II
d-q axes voltage and flux equations:
Torque equation:
q-axis
d-axis
dsV
qsV
qsqsIjX
dsdsIjX
ss Ir
sV~
sI~dsI
qsI
Background

Slide Slide 2626© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
)( mqsqsrds
dsdssds iLdt
diLirv
dsdsrqs
qsqssqs iLdt
diLirv
qsdsqsdsdsme iiLLiP
T )(22
3
Output Torque in MASynRM

Slide Slide 2727© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
The PMS Motor Model

Slide Slide 2828© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Model-Based Design of a PMSM
• Build Level 1 – Space vector generation
• Build Level 2 - Currents/DC-bus voltage measurement verification
• Build Level 3 - Tuning of dq-axis current closed loops
• Build Level 4 – Encoder verification
• Build Level 5 – Speed closed loop

Slide Slide 2929© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Space vector generation - Simulation

Slide Slide 3030© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Space vector generation – Real Time
vs*
vs*
Inv. Park
SpaceVector
Gen.
PWMDriver
Ta
Tb
Tc
Vq_testing
vds*
rmp_out
Vd_testing
PWM1
PWM2
PWM3
PWM4
PWM5
PWM6
speed_ref RampGen.
Rampcontrol
key modules under test
TMS320F28x controller
VoltageSource
Inverter
PMSM

Slide Slide 3131© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Currents/DC-bus voltage measurement verification - Simulation

Slide Slide 3232© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Currents/DC-bus voltage measurement verification – Real Time
vs*
vs*
Inv. Park
SpaceVector
Gen.
PWMDriver
Ta
Tb
Tc
VoltageSource
Inverter
PMSM
ia
ib
Ileg2_Bus
Driver
ADCIN1
ADCIN2
ADCIN3isPark Clarke
is
Vq_testing
vds*Vq_testing
iqs
Encoder
PWM1
PWM2
PWM3
PWM4
PWM5
PWM6
ids
RampGen.
Speed_ref Rampcontrol
e
rmp_out
TMS320F28x controller

Slide Slide 3333© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Tuning of dq-axis current closed loops - Simulation

Slide Slide 3434© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Tuning of dq-axis current closed loops – Real Time
key module under test
RampGen.
Speed_ref Rampcontrol
Iq_ref vs*
vs*
Inv. Park
SpaceVector
Gen.
PWMDriver
Ta
Tb
Tc
VoltageSource
Inverter
PMSM
ia
ib
Ileg2_Bus
Driver
ADCIN1
ADCIN2
ADCIN3isPark Clarke
is
ids*
PI
PI
rmp_out
iqs
Encoder
PWM1
PWM2
PWM3
PWM4
PWM5
PWM6
ids
Id_ref
vqs*
vds*
TMS320F28x controller

Slide Slide 3535© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Encoder verification - Simulation

Slide Slide 3636© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Encoder verification – Real Time
vs*
vs*
Inv. Park
SpaceVector
Gen.
PWMDriver
Ta
Tb
Tc
VoltageSource
Inverter
PMSM
ia
ib
Ileg2_Bus
Driver
ADCIN1
ADCIN2
ADCIN3isPark Clarke
is
QEP_A
dir
vqs*
vds*
PI
rmp_out
vds*
PI
Theta_elec
iqs
Encoder
QEP_B
QEP_inc
m
PWM1
PWM2
PWM3
PWM4
PWM5
PWM6
ids
RampGen.
QEPdriver
RampGen.
Speed_ref Rampcontrol
Iq_ref
Id_ref
TMS320F28x controller

Slide Slide 3737© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Speed closed loop - Simulation

Slide Slide 3838© © 2007 Texas Instruments Inc, 2007 Texas Instruments Inc,
Speed closed loop – Real Time
vs*
vs*
Inv. Park
SpaceVector
Gen.
PWMDriver
Ta
Tb
Tc
VoltageSource
Inverter
PMSM
ias
ibs
Ileg2_Bus
Driver
ADCIN1
ADCIN2
ADCIN3isPark Clarke
is
QEP_ASMOSPD
speedestimation dir
vqs*
vds*
PIiqs
*
PI
r
vds*
PI
rr
iqs
Encoder
QEP_B
QEP_inc
m
PWM1
PWM2
PWM3
PWM4
PWM5
PWM6
ids
ids*
RampGen.
QEPdriver
TMS320F28x controller





























