Embed Size (px)
Citation preview

FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E PHYSICS
RANDALL D. KNIGHT
Chapter 3 Lecture
© 2017 Pearson Education, Inc.
© 2017 Pearson Education, Inc.
IN THIS CHAPTER, you will learn how vectors are represented and used.
Chapter 3 Vectors and Coordinate Systems
Slide 3-2

© 2017 Pearson Education, Inc.
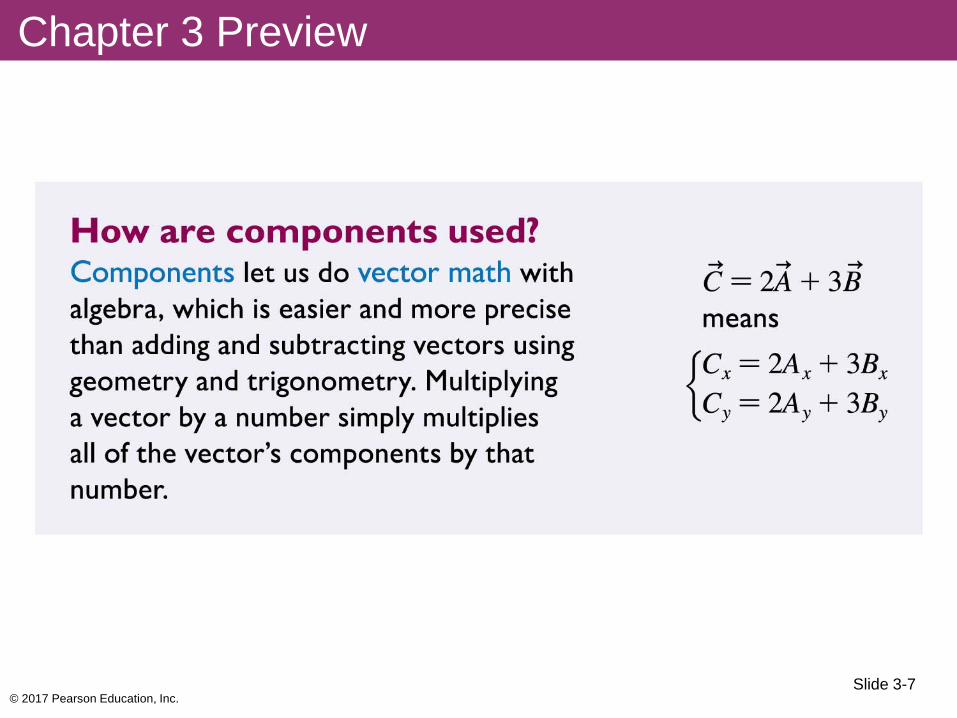
Chapter 3 Preview
Slide 3-3

© 2017 Pearson Education, Inc.
Chapter 3 Preview
Slide 3-4

© 2017 Pearson Education, Inc.
Chapter 3 Preview
Slide 3-5

© 2017 Pearson Education, Inc.
Chapter 3 Preview
Slide 3-6
© 2017 Pearson Education, Inc.
Chapter 3 Preview
Slide 3-7

© 2017 Pearson Education, Inc.
Chapter 3 Preview
Slide 3-8

© 2017 Pearson Education, Inc.
Chapter 3 Reading Questions
Slide 3-9

© 2017 Pearson Education, Inc.
What is a vector? A. A quantity having both size and direction. B. The rate of change of velocity. C. A number defined by an angle and a magnitude. D. The difference between initial and final
displacement. E. None of the above.
Reading Question 3.1
Slide 3-10

© 2017 Pearson Education, Inc.
What is a vector? A. A quantity having both size and direction. B. The rate of change of velocity. C. A number defined by an angle and a magnitude. D. The difference between initial and final
displacement. E. None of the above.
Reading Question 3.1
Slide 3-11

© 2017 Pearson Education, Inc.
What is the name of the quantity represented as ? A. Eye-hat. B. Invariant magnitude. C. Integral of motion. D. Unit vector in x-direction. E. Length of the horizontal axis.
Reading Question 3.2
ˆ i
Slide 3-12

© 2017 Pearson Education, Inc.
What is the name of the quantity represented as ? A. Eye-hat. B. Invariant magnitude. C. Integral of motion. D. Unit vector in x-direction. E. Length of the horizontal axis.
Reading Question 3.2
ˆ i
Slide 3-13

© 2017 Pearson Education, Inc.
This chapter shows how vectors can be added using A. Graphical addition. B. Algebraic addition. C. Numerical addition. D. Both A and B. E. Both A and C.
Reading Question 3.3
Slide 3-14

© 2017 Pearson Education, Inc.
This chapter shows how vectors can be added using A. Graphical addition. B. Algebraic addition. C. Numerical addition. D. Both A and B. E. Both A and C.
Reading Question 3.3
Slide 3-15

© 2017 Pearson Education, Inc.
To decompose a vector means A. To break it into several smaller vectors. B. To break it apart into scalars. C. To break it into pieces parallel to the axes. D. To place it at the origin. E. This topic was not discussed in Chapter 3.
Reading Question 3.4
Slide 3-16

© 2017 Pearson Education, Inc.
To decompose a vector means A. To break it into several smaller vectors. B. To break it apart into scalars. C. To break it into pieces parallel to the axes. D. To place it at the origin. E. This topic was not discussed in Chapter 3.
Reading Question 3.4
Slide 3-17

© 2017 Pearson Education, Inc.
Chapter 3 Content, Examples, and QuickCheck Questions
Slide 3-18

© 2017 Pearson Education, Inc.
A quantity that is fully described by a single number is called a scalar quantity (i.e., mass, temperature, volume).
A quantity having both a magnitude and a direction is called a vector quantity.
The geometric representation of a vector is an arrow with the tail of the arrow placed at the point where the measurement is made.
We label vectors by drawing a small arrow over the letter that represents the vector, i.e.,: for position, for velocity, for acceleration.
Vectors
The velocity vector has both a magnitude and a direction.
Slide 3-19

© 2017 Pearson Education, Inc.
Properties of Vectors
Suppose Sam starts from his front door, takes a walk, and ends up 200 ft to the northeast of where he started.
We can write Sam’s displacement as
The magnitude of Sam’s displacement is S = |S| = 200 ft, the distance between his initial and final points.
Slide 3-20

© 2017 Pearson Education, Inc.
Sam and Bill are neighbors. They both walk 200 ft to
the northeast of their own front doors.
Bill’s displacement B = (200 ft, northeast) has the same magnitude and direction as Sam’s displacement S.
Two vectors are equal if they have the same magnitude and direction.
This is true regardless of the starting points of the vectors.
B = S
Properties of Vectors
Slide 3-21

© 2017 Pearson Education, Inc.
A hiker’s displacement is 4 miles to the east, then 3 miles to the north, as shown.
Vector is the net displacement:
Because and are at right angles, the magnitude of is given by the Pythagorean theorem:
To describe the direction of , we find the angle:
Altogether, the hiker’s net displacement is
Vector Addition
Slide 3-22

© 2017 Pearson Education, Inc.
Which of the vectors in the second row shows ?
QuickCheck 3.1
Slide 3-23

© 2017 Pearson Education, Inc.
Which of the vectors in the second row shows ?
QuickCheck 3.1
Slide 3-24

© 2017 Pearson Education, Inc.
Example 3.1 Using Graphical Addition to Find a Displacement
Slide 3-25

© 2017 Pearson Education, Inc.
Example 3.1 Using Graphical Addition to Find a Displacement
Slide 3-26

© 2017 Pearson Education, Inc.
It is often convenient to draw two vectors with their tails together, as shown in (a) below.
To evaluate F = D + E, you could move E over and use the tip-to-tail rule, as shown in (b) below.
Alternatively, F = D + E can be found as the diagonal of the parallelogram defined by D and E, as shown in (c) below.
Parallelogram Rule for Vector Addition
Slide 3-27

© 2017 Pearson Education, Inc.
Vector addition is easily extended to more than two vectors.
The figure shows the path of a hiker moving from initial position 0 to position 1, then 2, 3, and finally arriving at position 4.
The four segments are described by displacement vectors D1, D2, D3 and D4.
The hiker’s net displacement, an arrow from position 0 to 4, is
The vector sum is found by using the tip-to-tail method three times in succession.
Addition of More than Two Vectors
Slide 3-28

© 2017 Pearson Education, Inc.
More Vector Mathematics
Slide 3-29

© 2017 Pearson Education, Inc.
Which of the vectors in the second row shows 2 – ?
QuickCheck 3.2
Slide 3-30

© 2017 Pearson Education, Inc.
Which of the vectors in the second row shows 2 – ?
QuickCheck 3.2
Slide 3-31
© 2017 Pearson Education, Inc.
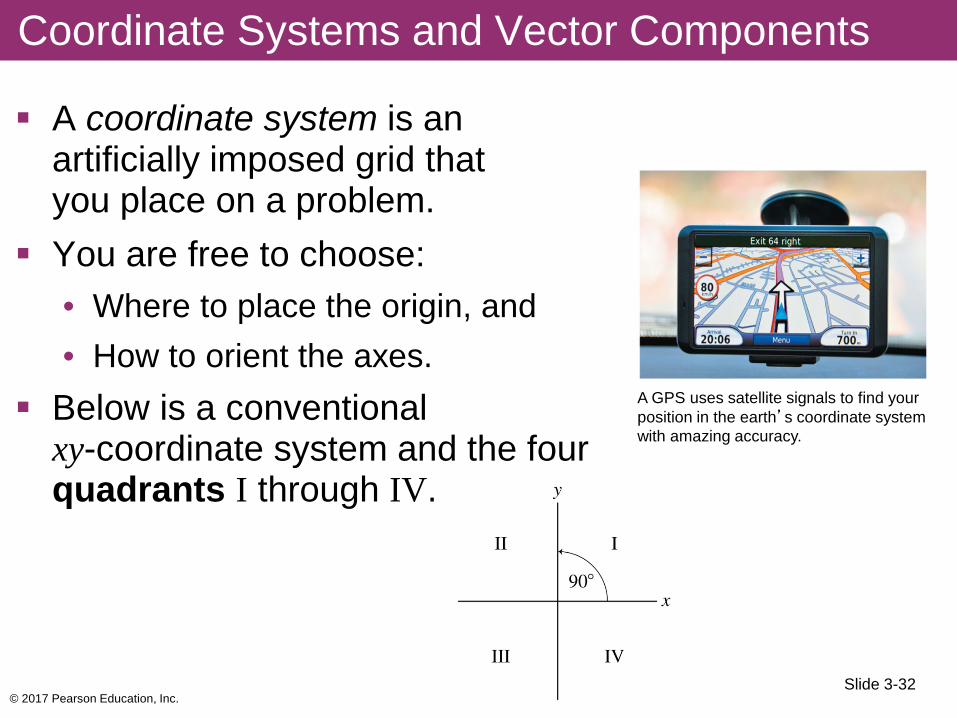
A coordinate system is an artificially imposed grid that you place on a problem.
You are free to choose: • Where to place the origin, and • How to orient the axes.
Below is a conventional xy-coordinate system and the four quadrants I through IV.
Coordinate Systems and Vector Components
A GPS uses satellite signals to find your position in the earth’s coordinate system with amazing accuracy.
Slide 3-32

© 2017 Pearson Education, Inc.
The figure shows a vector A and an xy-coordinate system that we’ve chosen.
We can define two new vectors parallel to the axes that we call the component vectors of A, such that
We have broken A into two perpendicular vectors that are parallel to the coordinate axes.
This is called the decomposition of A into its component vectors.
Component Vectors
Slide 3-33
© 2017 Pearson Education, Inc.
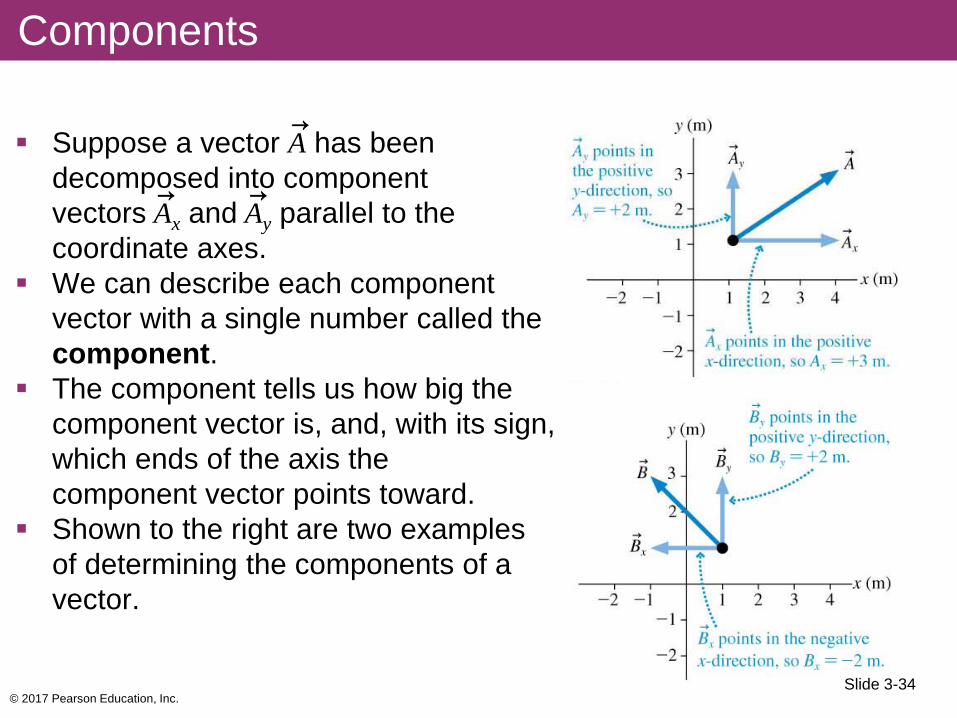
Suppose a vector A has been decomposed into component vectors Ax and Ay parallel to the coordinate axes.
We can describe each component vector with a single number called the component.
The component tells us how big the component vector is, and, with its sign, which ends of the axis the component vector points toward.
Shown to the right are two examples of determining the components of a vector.
Components
Slide 3-34

© 2017 Pearson Education, Inc.
Tactics: Determining the Components of a Vector
Slide 3-35

© 2017 Pearson Education, Inc.
What are the x- and y-components of this vector?
A. 3, 2 B. 2, 3 C. –3, 2 D. 2, –3 E. –3, -2
QuickCheck 3.3
Slide 3-36
© 2017 Pearson Education, Inc.
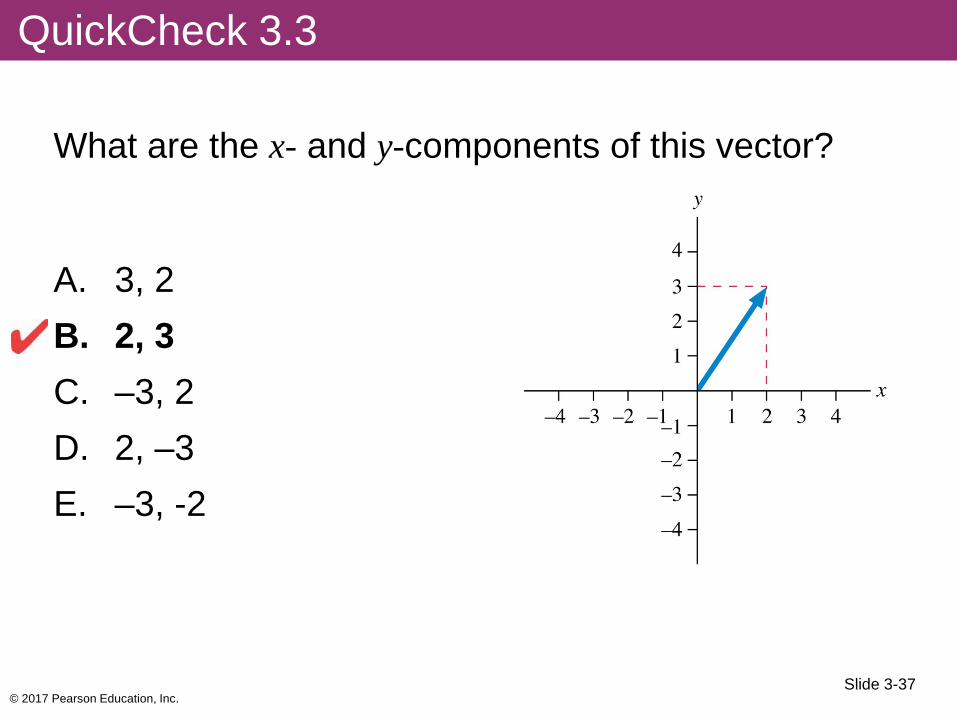
What are the x- and y-components of this vector?
A. 3, 2 B. 2, 3 C. –3, 2 D. 2, –3 E. –3, -2
QuickCheck 3.3
Slide 3-37

© 2017 Pearson Education, Inc.
What are the x- and y-components of this vector?
A. 3, 4 B. 4, 3 C. –3, 4 D. 4, –3 E. –3, –4
QuickCheck 3.4
Slide 3-38
© 2017 Pearson Education, Inc.
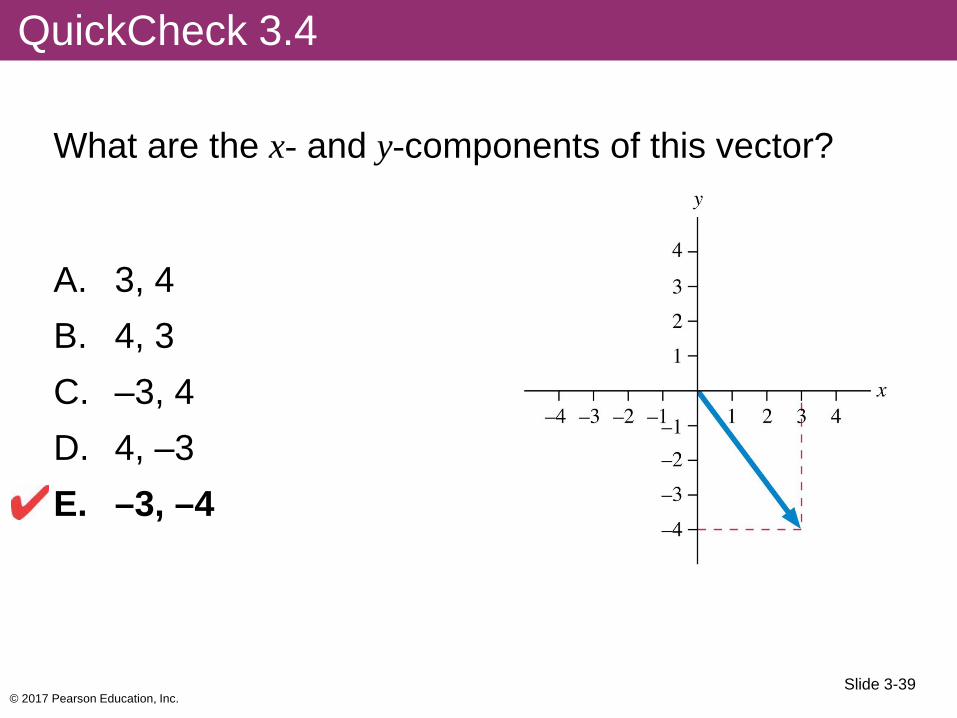
What are the x- and y-components of this vector?
A. 3, 4 B. 4, 3 C. –3, 4 D. 4, –3 E. –3, –4
QuickCheck 3.4
Slide 3-39

© 2017 Pearson Education, Inc.
What are the x- and y-components of vector C?
A. 1, –3 B. –3, 1 C. 1, –1 D. –4, 2 E. 2, –4
QuickCheck 3.5
Slide 3-40

© 2017 Pearson Education, Inc.
What are the x- and y-components of vector C?
A. 1, –3 B. –3, 1 C. 1, –1 D. –4, 2 E. 2, –4
QuickCheck 3.5
Slide 3-41

© 2017 Pearson Education, Inc.
We will frequently need to decompose a vector into its components.
We will also need to “reassemble” a vector from its components.
The figure to the right shows how to move back and forth between the geometric and component representations of a vector.
Moving Between the Geometric Representation and the Component Representation
Slide 3-42

© 2017 Pearson Education, Inc.
If a component vector points left (or down), you must manually insert a minus sign in front of the component, as done for By in the figure to the right.
The role of sines and cosines can be reversed, depending upon which angle is used to define the direction.
The angle used to define the direction is almost always between 0º and 90º.
Moving Between the Geometric Representation and the Component Representation
Slide 3-43

© 2017 Pearson Education, Inc.
Example 3.3 Finding the Components of an Acceleration Vector
Slide 3-44

© 2017 Pearson Education, Inc.
Example 3.4 Finding the Direction of Motion
Slide 3-45

© 2017 Pearson Education, Inc.
Example 3.4 Finding the Direction of Motion
Slide 3-46

© 2017 Pearson Education, Inc.
Each vector in the figure to the right has a magnitude of 1, no units, and is parallel to a coordinate axis.
A vector with these properties is called a unit vector.
These unit vectors have the special symbols:
Unit vectors establish the directions of the positive axes of the coordinate system.
Unit Vectors
Slide 3-47

© 2017 Pearson Education, Inc.
When decomposing a vector, unit vectors provide a useful way to write component vectors:
The full decomposition of the vector A can then be
written
Vector Algebra
Slide 3-48

© 2017 Pearson Education, Inc.
Vector C can be written
QuickCheck 3.6
A. –3î + ĵ.
B. –4î + 2ĵ.
C. î – 3ĵ.
D. 2î – 4ĵ.
E. î – ĵ.
Slide 3-49

© 2017 Pearson Education, Inc.
Vector C can be written
QuickCheck 3.6
A. –3î + ĵ.
B. –4î + 2ĵ.
C. î – 3ĵ.
D. 2î – 4ĵ.
E. î – ĵ.
Slide 3-50

© 2017 Pearson Education, Inc.
Example 3.5 Run Rabbit Run!
Slide 3-51

© 2017 Pearson Education, Inc.
We can perform vector addition by adding the x- and y-components separately.
This method is called algebraic addition. For example, if D = A + B + C, then
Similarly, to find R = P – Q we would compute
To find T = cS, where c is a scalar, we would compute
Working With Vectors
Slide 3-52

© 2017 Pearson Education, Inc.
Example 3.6 Using Algebraic Addition to Find a Displacement
Slide 3-53

© 2017 Pearson Education, Inc.
Example 3.6 Using Algebraic Addition to Find a Displacement
Slide 3-54

© 2017 Pearson Education, Inc.
For some problems it is convenient to tilt the axes of the coordinate system.
The axes are still perpendicular to each other, but there is no requirement that the x-axis has to be horizontal.
Tilted axes are useful if you need to determine component vectors “parallel to” and “perpendicular to” an arbitrary line or surface.
Tilted Axes and Arbitrary Directions
Slide 3-55

© 2017 Pearson Education, Inc.
Example 3.7 Muscle and Bone
Slide 3-56

© 2017 Pearson Education, Inc.
Example 3.7 Muscle and Bone
Slide 3-57

© 2017 Pearson Education, Inc.
The angle Φ that specifies the direction of vector is
A. tan–1(Cx/Cy)
B. tan–1(Cy/Cx)
C. tan–1(|Cx|/Cy)
D. tan–1(|Cx|/|Cy|)
E. tan–1(|Cy|/|Cx|)
QuickCheck 3.7
Slide 3-58

© 2017 Pearson Education, Inc.
The angle Φ that specifies the direction of vector is
A. tan–1(Cx/Cy)
B. tan–1(Cy/Cx)
C. tan–1(|Cx|/Cy)
D. tan–1(|Cx|/|Cy|)
E. tan–1(|Cy|/|Cx|)
QuickCheck 3.7
Slide 3-59

© 2017 Pearson Education, Inc.
Chapter 3 Summary Slides
Slide 3-60

© 2017 Pearson Education, Inc.
Important Concepts
Slide 3-61

© 2017 Pearson Education, Inc.
Important Concepts
Slide 3-62

© 2017 Pearson Education, Inc.
Using Vectors
Slide 3-63

© 2017 Pearson Education, Inc.
Using Vectors
Slide 3-64

© 2017 Pearson Education, Inc.
Using Vectors
Slide 3-65





























