Embed Size (px)
Citation preview

Elizabeth Villota
Control Moderno yOptimo
– Notas de Clase MT227 –
27 de septiembre de 2012
Springer

Indice general
1. Modelado de sistemas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . 11.1. Conceptos en modelado . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1. Contribucion al modelado de la mecanica y de la ingenierıa electrica . . . . . . . . . . . . . . . . . . . . . . 11.2. Modelos espacio de estados . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1. Ecuacion diferencial ordinaria . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . 31.2.2. Ecuacion en diferencias finitas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 5
1.3. Ejemplo: Control de rapidez (control crucero) . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4. Mas sobre modelado de sistemas . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.5. Mas ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5.1. Ejemplo: Circuito RLC . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.5.2. Ejemplo: Motor DC y acoplamiento flexible . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.5.3. Ejemplo: Diagrama de bloques del motor DC . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.5.4. Ejemplo: Doble filtro pasa-baja RC . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.5.5. Ejemplo: Horno electrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . 14
2. Linealizacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.1. Linealizando ecuaciones diferenciales . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2. Ejemplo: Vehıculo aereo con impulsadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 20
2.2.1. Modelo lineal del vehıculo aereo con impulsadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 222.3. Ejemplo: manipulador robotico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . 22
2.3.1. Ecuaciones de movimiento usando Lagrange . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.3.2. Representacion espacio de estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 242.3.3. Linealizacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . 252.3.4. Ideas adicionales acerca del modelo . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.4. Ejemplo: manipulador robotico - incluyendo la dinamica del cuerpo rıgido . . . . . . . . . . . . . . . . . . . . . . . 272.4.1. Ecuaciones de movimiento usando Lagrange . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.4.2. Representacion espacio de estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 30
3. Sistemas Lineales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 313.1. Definiciones basicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 31
3.1.1. Linealidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.1.2. Invariancia en el tiempo . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.2. Respuesta a la condicion inicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 333.2.1. Ejemplo: Integrador doble . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.2.2. Ejemplo: Oscilador sin amortiguamiento . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.3. Respuesta entrada/salida . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.3.1. Ecuacion de convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 363.3.2. Respuesta en estado estacionario . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.4. Polos, ceros y ganancia . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.5. Otros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
V
VI Indice general
4. Formas canonicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 434.1. Definiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.1.1. Invariancia de coordenadas . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.1.2. Autovalores/autovectores de una matriz y modos . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.1.3. Teorema de Cayley-Hamilton . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2. Forma canonica modal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . 484.2.1. Ejemplo: Sistema de multiples entradas y multiples salidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.3. Forma canonica controlable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.3.1. Caso, sistema de una entrada. . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 494.3.2. Caso, sistema de multiples entradas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . 51
4.4. Forma canonica observable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 544.4.1. Caso, sistema de multiples salidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . 54
4.5. Representaciones espacio de estados en formas canonicas a partir de funciones de transferencia delsistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 564.5.1. Forma canonica controlable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . 564.5.2. Forma canonica observable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . 574.5.3. Forma canonica modal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . 57
5. Control por realimentacion de estados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 595.1. Controlabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.1.1. Ejemplo: Motor DC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 605.1.2. Sistema no controlable . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 635.1.3. Estabilizabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.2. Control por realimentacion de estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . 645.2.1. Estructura del controlador . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 655.2.2. Estabilizacion por realimentacion de estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . 655.2.3. Desempeno. Control para la solucion en estado estacionario . . . . . . . . . . . . . . . . . . . . . . . . . . . . .705.2.4. Especificaciones del diseno del control por realimentacion de estados . . . . . . . . . . . . . . . . . . . . . 715.2.5. Ejemplo, sistema de balance . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.3. Control integral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 765.3.1. Ejemplo, control de rapidez con control integral . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6. Control por realimentacion de salidas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 816.1. Observabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.1.1. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 826.1.2. Teorema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6.2. Observador de orden completo . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 846.2.1. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 856.2.2. Control usando estados estimados . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.3. Observador de orden reducido . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 936.3.1. Compensador controlador/estimador orden-reducido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 956.3.2. Ejemplo: Motor DC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
7. Estabilidad y desempeno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 997.1. Estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
7.1.1. Definiciones basicas de estabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 1007.1.2. Estabilidad segun Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . 101
7.2. Indices de desempeno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . 108
8. Control Optimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . 1118.1. Problema del ControlOptimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . 111
8.1.1. Calculo Variacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1118.1.2. Solucion del problema de optimizacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
8.2. Regulador cuadratico lineal, (LQR por sus siglas en ingles) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1178.2.1. Ecuacion de Riccati Diferencial (DRE, por sus siglas en ingles) . . . . . . . . . . . . . . . . . . . . . . . . . . 118

Indice general VII
8.2.2. Valor delındice de desempeno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 1198.2.3. Ejemplo integrador doble . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
8.3. Regulador cuadratico lineal en estado estacionario - Horizonte infinito . . .. . . . . . . . . . . . . . . . . . . . . . . . 1208.3.1. Ecuacion de Riccati Algebraica (ARE, por sus siglas en ingles) . . . .. . . . . . . . . . . . . . . . . . . . . . . 1218.3.2. Resolviendo la ARE usando el metodo del autovector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . 1258.3.3. Propiedades de robustez del diseno LQR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1338.3.4. Regla de Bryson para seleccion de matricesQ y R. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
9. Estimacion Optima . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 1359.1. Filtro de Kalman-Bucy . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
9.1.1. Teorıa de probabilidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . 1369.1.2. Problema del observadoroptimo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 138
9.2. Control LQG . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1409.2.1. Ejemplo: Aeronave de impulsion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 1419.2.2. Compensadoroptimo LQG podrıa resultar en un sistema en lazo cerrado inestable . . . . . . . .. . 144
10. Topicos especiales de control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . 14710.1. Problema de Generacion de Trayectoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . 147
10.1.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . 14710.1.2. Formulacion alternativa: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . 14810.1.3. Programacion de ganancias (GAIN SCHEDULING) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
10.2. Filtro de Kalman Extendido . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15310.2.1. Idea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15410.2.2. Ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154
11. Problemas propuestos y resueltos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 15711.1. Problemas Capıtulo 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 15711.2. Problemas Capıtulo 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 16511.3. Problemas Capıtulo 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 17111.4. Problemas Capıtulo 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 17411.5. Problemas Capıtulo 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 17611.6. Problemas Capıtulo 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 18311.7. Problemas Capıtulo 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 18711.8. Problemas Capıtulo 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 19011.9. Problemas Capıtulo 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . 194
A. Ecuaciones de Euler Lagrange. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . 199A.1. Problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200A.2. Solucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
B. Optimizacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 203B.1. Optimizacion sin restricciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 203
B.1.1. Ejemplo: Superficies cuadraticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 203B.2. Optimizacion con restricciones de igualdad . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 205
B.2.1. Multiplicadores de Lagrange y el Hamiltoniano . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205B.2.2. Ejemplo: Superficie cuadratica con restriccion lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 206
C. Calculo Variacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . 209C.1. Conceptos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209

Capıtulo 1Modelado de sistemas
Un modelo es una representacion puntual de la dinamica del sistema y es usada con la finalidad de responderpreguntas mediante analisis y simulacion. El modelo que se elige depende del tipo de preguntas que sedesee responder,y como tal, existe mas de un tipo de modelo para un mismo sistema dinamico, con diferentes niveles de fidelidaddependiendo del fenomeno de interes.
1.1. Conceptos en modelado
Un modeloes una representacion matematica de un sistema fısico, biologico o de informacion. El modelo permiterazonar en relacion al sistema y hacer predicciones con respecto a como se comportara un sistema. En esta parte nuestrointeres es emplear modelos de sistemas dinamicos que describan el comportamiento entrada/salida de un sistema y paraesto adoptaremos la representacion en la forma espacio de estados.
En su forma mas elemental, unsistema dinamicoes aquel donde los efectos de las acciones (entradas) no se presen-tan inmediatamente. Por ejemplo, la rapidez de un vehıculo no cambia inmediatamente despues de presionado el pedaldel freno, asi como tampoco un dolor de cabeza desaparece justo despues de haber tomado una aspirina. Un ejemploen elambito financiero serıa que los beneficios de una inversion no se perciben a corto plazo, estos se presentan solo alargo plazo (si fue una buena inversion). Como caracterıstica fundamental todos estos ejemplos de sistemas dinamicospresentan un comportamiento que evoluciona en el tiempo.
1.1.1. Contribucion al modelado de la mecanica y de la ingenierıa electrica
En mecanica, el estudio de la dinamica surgio al intentar describir el movimiento planetario1. Uno de los triunfosde la mecanica Newtoniana fue la observacion de que el movimiento de los planetas podıa ser predecida en base a lasposiciones y velocidades actuales de todos los planetas. Elestadode un sistema dinamico es la coleccion de variablesque caracteriza completamente el movimiento de un sistema con el proposito de predecir el movimiento futuro. Alconjunto de todos los estados posibles se le denominaespacio de estados.
Un clase comun de modelos matematicos para sistemas dinamicos es representado por ecuaciones diferencialesordinarias (ODE, por sus siglas en ingles). En mecanica una de esas ecuaciones diferenciales es:
mq+c(q)+kq= u, (1.1)
dondeu representa el efecto de entradas externas. El modelo (1.1) es llamadoecuacion diferencial controladao forza-da. Cuandou = 0, el modelo se denominaecuacion diferencial libre. Este modelo puede facilmente representar unsistema dinamico tal como el sistema masa-resorte con amortiguamiento, ver Fig. 1.1. La variableq∈ R representa laposicion de la masam con respecto a su posicion de reposo. Se emplea ˙q para referirse a la derivada con respecto al
1 En base a la observacion detallada de los planetas realizada por Tycho Brahe y los resultados de Kepler, se encontro empiricamente quelasorbitas de los planetas podıan ser descritas por elipses.
1
2 1 Modelado de sistemas
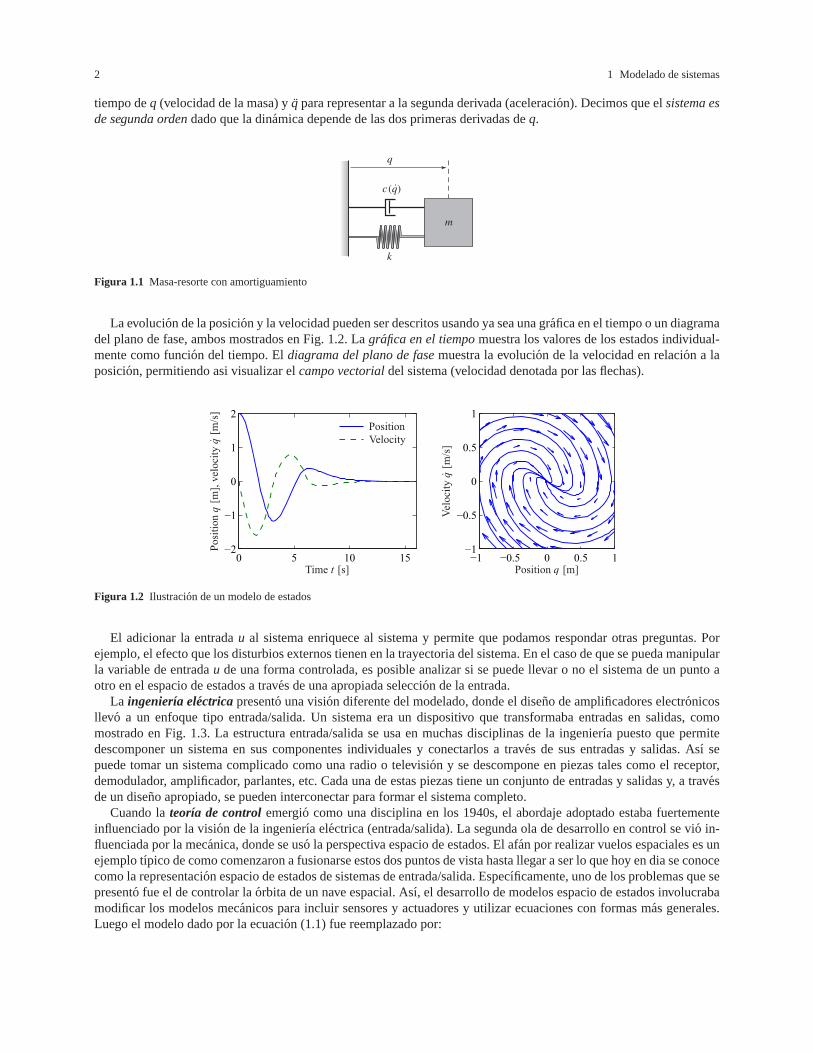
tiempo deq (velocidad de la masa) y ¨q para representar a la segunda derivada (aceleracion). Decimos que elsistema esde segunda ordendado que la dinamica depende de las dos primeras derivadas deq.
c (q)
q
m
k
Figura 1.1 Masa-resorte con amortiguamiento
La evolucion de la posicion y la velocidad pueden ser descritos usando ya sea una grafica en el tiempo o un diagramadel plano de fase, ambos mostrados en Fig. 1.2. Lagrafica en el tiempomuestra los valores de los estados individual-mente como funcion del tiempo. Eldiagrama del plano de fasemuestra la evolucion de la velocidad en relacion a laposicion, permitiendo asi visualizar elcampo vectorialdel sistema (velocidad denotada por las flechas).
0 5 10 15−2
−1
0
1
2
Time t [s]
Positionq[m],velocityq[m/s]
Position
Velocity
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
Position q [m]
Velocityq[m/s]
Figura 1.2 Ilustracion de un modelo de estados
El adicionar la entradau al sistema enriquece al sistema y permite que podamos respondar otras preguntas. Porejemplo, el efecto que los disturbios externos tienen en la trayectoria del sistema. En el caso de que se pueda manipularla variable de entradau de una forma controlada, es posible analizar si se puede llevar o no el sistema de un punto aotro en el espacio de estados a traves de una apropiada seleccion de la entrada.
La ingenierıa electricapresento una vision diferente del modelado, donde el diseno de amplificadores electronicosllevo a un enfoque tipo entrada/salida. Un sistema era un dispositivo que transformaba entradas en salidas, comomostrado en Fig. 1.3. La estructura entrada/salida se usa enmuchas disciplinas de la ingenierıa puesto que permitedescomponer un sistema en sus componentes individuales y conectarlos a traves de sus entradas y salidas. Ası sepuede tomar un sistema complicado como una radio o television y se descompone en piezas tales como el receptor,demodulador, amplificador, parlantes, etc. Cada una de estas piezas tiene un conjunto de entradas y salidas y, a travesde un diseno apropiado, se pueden interconectar para formar el sistema completo.
Cuando lateorıa de controlemergio como una disciplina en los 1940s, el abordaje adoptado estaba fuertementeinfluenciado por la vision de la ingenierıa electrica (entrada/salida). La segunda ola de desarrollo en control se vio in-fluenciada por la mecanica, donde se uso la perspectiva espacio de estados. El afan por realizar vuelos espaciales es unejemplo tıpico de como comenzaron a fusionarse estos dos puntos de vista hasta llegar a ser lo que hoy en dia se conocecomo la representacion espacio de estados de sistemas de entrada/salida. Especıficamente, uno de los problemas que sepresento fue el de controlar laorbita de un nave espacial. Ası, el desarrollo de modelos espacio de estados involucrabamodificar los modelos mecanicos para incluir sensores y actuadores y utilizar ecuaciones con formas mas generales.Luego el modelo dado por la ecuacion (1.1) fue reemplazado por:

1.2 Modelos espacio de estados 3
7+v
–v
vos adj
(+)
(–)
InputsOutput3
2
6
4
Q9
Q1 Q2
Q3 Q4
Q7
Q5
R1 R12
R8
R7 R9
R10
R11R2
Q6Q22
Q17
Q16
Q1830pF
Q15
Q14
Q20
Q8
SystemInput Output
Figura 1.3 Diagrama entrada/salida
dxdt
= f (x,u),
y = h(x,u),(1.2)
dondex es el vector de variables de estado,u es el vector de senales de control yy es un vector de (senales) medidas.El termino dx
dt representa la derivada dex con respecto al tiempo, ahora considerado un vector, yf y h son mapeamien-tos (posiblemente no lineales) de sus argumentos a vectoresde dimension apropiada. Para sistemas mecanicos, casosistema masa resorte con amortiguamiento, el estado consiste en la posicion y velocidad de la masa.
Para complementar la idea de modelado, cabe destacar que un desarrollo final en la construccion del problema conuna vision de la teorıa de control viene dado por la inclusion de disturbios e incertezas del modelo2.
Una observacion a destacar en el modelado para diseno de sistemas de control es que el sistema por realimentacionpuede ser a menudo analizado y disenado en base a modelos relativamente simples. La justificacion se encuentra en larobustez inherente que presentan los sistemas de control por realimentacion. Sin embargo, otro tipo de uso de modelosrequiere de mas complejidad y precision. Un ejemplo son las estrategias de control por alimentacion anticipada, dondeuno usa el modelo para precalcular las entradas que haran que el sistema responda de cierta forma. Otraarea es la devalidacion de sistemas.
1.2. Modelos espacio de estados
Esta seccion presentara dos formas principales de modelos a ser usadas en clase. Ambas hacen uso de nociones deestado, entrada, salida y dinamica para describir el comportamiento de un sistema.
1.2.1. Ecuacion diferencial ordinaria
El estado de un sistema es la coleccion de variable que resume el pasado de un sistema con el proposito de predecirel futuro. Para un sistema fısico el estado esta compuesto de las variables necesarias para el almacenamiento de masa,momento y energia. Una cuestion importante en el del modelado es el decidir cuan exacta debe ser la representacionde este almacenamiento. Las variables de estado son representadas por un vectorx∈ R
n llamado el vector de estados.Las variables de control son representadas por otro vectoru∈ R
p, y la senal medida por el vectory∈ Rq. Un sistema
se puede representar entonces por la ecuacion diferencial:
dxdt
= f (x,u),
y = h(x,u),(1.3)
2 Disturbios e incertezas del modelo son considerados elementos crticos en la teorıa de control.

4 1 Modelado de sistemas
donde f : Rn×Rp 7→ R
n y h : Rn×Rp 7→ R
q son mapeamientos suaves. Un modelo de esta forma se llamamodeloespacio de estados.
La dimension del vector de estados es llamadaordendel sistema. El sistema (1.4) es llamadoinvariante en el tiempoporquef y h no dependen explicitamente del tiempot; existen sistemas variantes en el tiempo mas generales donde lasfunciones si dependen del tiempo. El modelo consiste en dos funciones: la funcion f que provee la variacion del vectorde estados con respecto al tiempo en funcion del estadox y el controlu, y la funcion h que provee los valores medidocomo funcion del estadox y del controlu.
Un sistema se denomina sistema de espacio de estadoslineal si las funcionesf y h son lineales enx y u. Un sistemaespacio de estados lineal puede ser representado por:
dxdt
= Ax+Bu,
y =Cx+Du,(1.4)
dondeA, B,C y D son matrices. Si estas matrices son constantes, entonces sedice que tal sistema es lineal e invarianteen el tiempo, LTI por sus siglas en ingles. La matrizA es llamadamatriz dinamicao matriz de estados, la matrizB esllamada lamatriz de controlo matriz de entradas, la matrizC es llamadamatriz del sensoro matriz de salidas, y lamatrizD es llamada lamatriz del termino directo.
Generalizando la ecuacion dinamica de segundo orden estudiada en mecanica, resulta una ecuacion de la forma:
dnydtn
+an−1dn−1ydtn−1 + ...+aoy= u, (1.5)
dondet es la variable independiente,y(t) es la variable de (salida) dependiente yu(t) es la entrada. La notaciondkydtk
denota lak-esima derivada con respecto a tiempot, a veces denotada pory(k). La ecuacion diferencial controlada (1.5)se dice que es un sistema den-esima orden. Este sistema se puede convertir en la forma espacio estado definiendo:
x=
x1
x2...
xn−1
xn
=
ydy/dt
...dn−2y/dtn−2
dn−1y/dtn−1
, (1.6)
y la ecuacion espacio de estados resulta:
ddt
x1
x2...
xn−1
xn
=
x2
x3...
xn
−aox1− ...−an−1xn
+
00...0u
, y= x1. (1.7)
Con la definicion apropiada deA, B, C y D, esta ecuacion se puede definir en la forma espacio de estados lineal.Una forma aun mas general se obtiene dejando que la salida sea una combinacion lineal de los estados del sistema,
por ejemplo:y= b1x1+b2x2+ ...+bnxn+du. (1.8)
Este sistema puede ser modelado en espacio de estados como:
1.2 Modelos espacio de estados 5
ddt
x1
x2
x3...
xn
=
0 1 ... 0 0...
...0 0 1 00 0 ... 0 1−a0 −a1 ... −an−2 −an−1
x+
00...01
u,
y=[b1 b2 ... bn
]x+du.
(1.9)
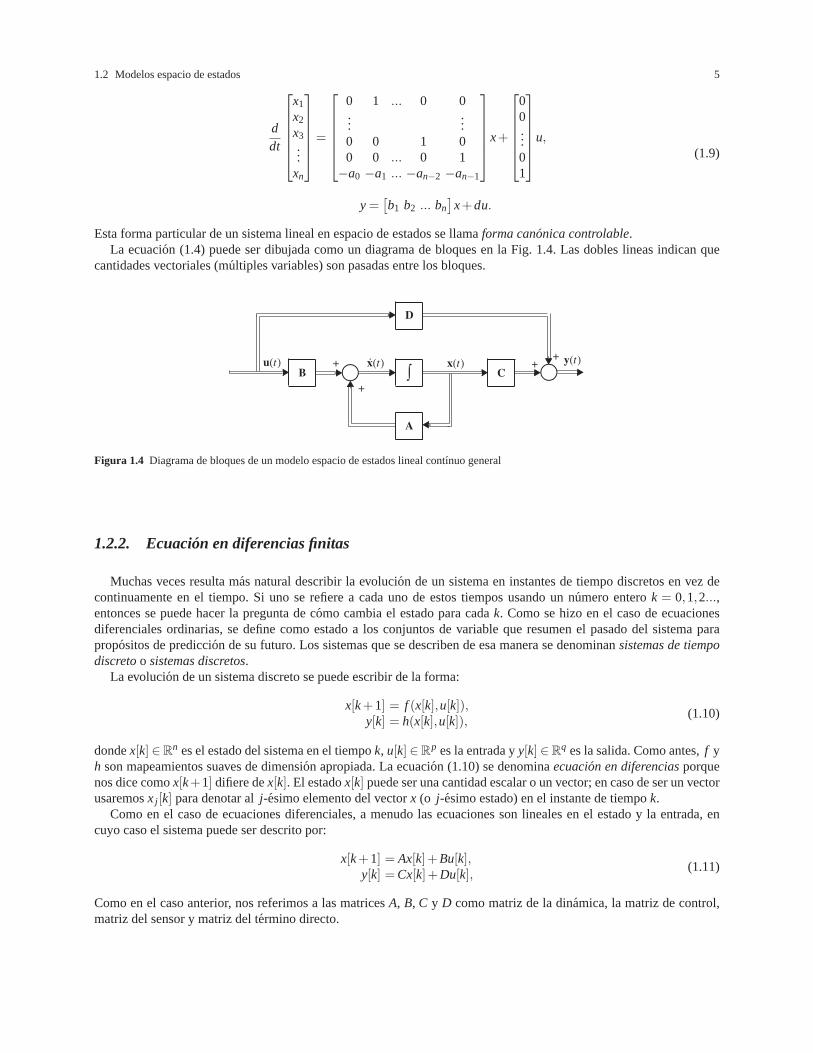
Esta forma particular de un sistema lineal en espacio de estados se llamaforma canonica controlable.La ecuacion (1.4) puede ser dibujada como un diagrama de bloques en la Fig. 1.4. Las dobles lineas indican que
cantidades vectoriales (multiples variables) son pasadas entre los bloques.
+
+
A
CB ∫x(t)u(t) x(t)· y(t)
D
++
Block diagram of a
general continuous linear
Figura 1.4 Diagrama de bloques de un modelo espacio de estados lineal contınuo general
1.2.2. Ecuacion en diferencias finitas
Muchas veces resulta mas natural describir la evolucion de un sistema en instantes de tiempo discretos en vez decontinuamente en el tiempo. Si uno se refiere a cada uno de estos tiempos usando un numero enterok = 0,1,2...,entonces se puede hacer la pregunta de como cambia el estado para cadak. Como se hizo en el caso de ecuacionesdiferenciales ordinarias, se define como estado a los conjuntos de variable que resumen el pasado del sistema parapropositos de prediccion de su futuro. Los sistemas que se describen de esa manera sedenominansistemas de tiempodiscretoo sistemas discretos.
La evolucion de un sistema discreto se puede escribir de la forma:
x[k+1] = f (x[k],u[k]),y[k] = h(x[k],u[k]),
(1.10)
dondex[k] ∈Rn es el estado del sistema en el tiempok, u[k] ∈Rp es la entrada yy[k] ∈Rq es la salida. Como antes,f yh son mapeamientos suaves de dimension apropiada. La ecuacion (1.10) se denominaecuacion en diferenciasporquenos dice comox[k+1] difiere dex[k]. El estadox[k] puede ser una cantidad escalar o un vector; en caso de ser un vectorusaremosx j [k] para denotar alj-esimo elemento del vectorx (o j-esimo estado) en el instante de tiempok.
Como en el caso de ecuaciones diferenciales, a menudo las ecuaciones son lineales en el estado y la entrada, encuyo caso el sistema puede ser descrito por:
x[k+1] = Ax[k]+Bu[k],y[k] =Cx[k]+Du[k],
(1.11)
Como en el caso anterior, nos referimos a las matricesA, B, C y D como matriz de la dinamica, la matriz de control,matriz del sensor y matriz del termino directo.
6 1 Modelado de sistemas
1.3. Ejemplo: Control de rapidez (control crucero)
El control de rapidez de un vehıculo es un problema comun de sistema por realimentacion que encontramos ennuestro quehacer diario. El sistema intenta mantener una rapidez constante en la presencia de disturbios. El controlcompensa el efecto de los disturbios midiendo la rapidez delvehıculo y ajustando la valvula de alimentacion de com-bustible apropiadamente (para acelerar o desacelerar).
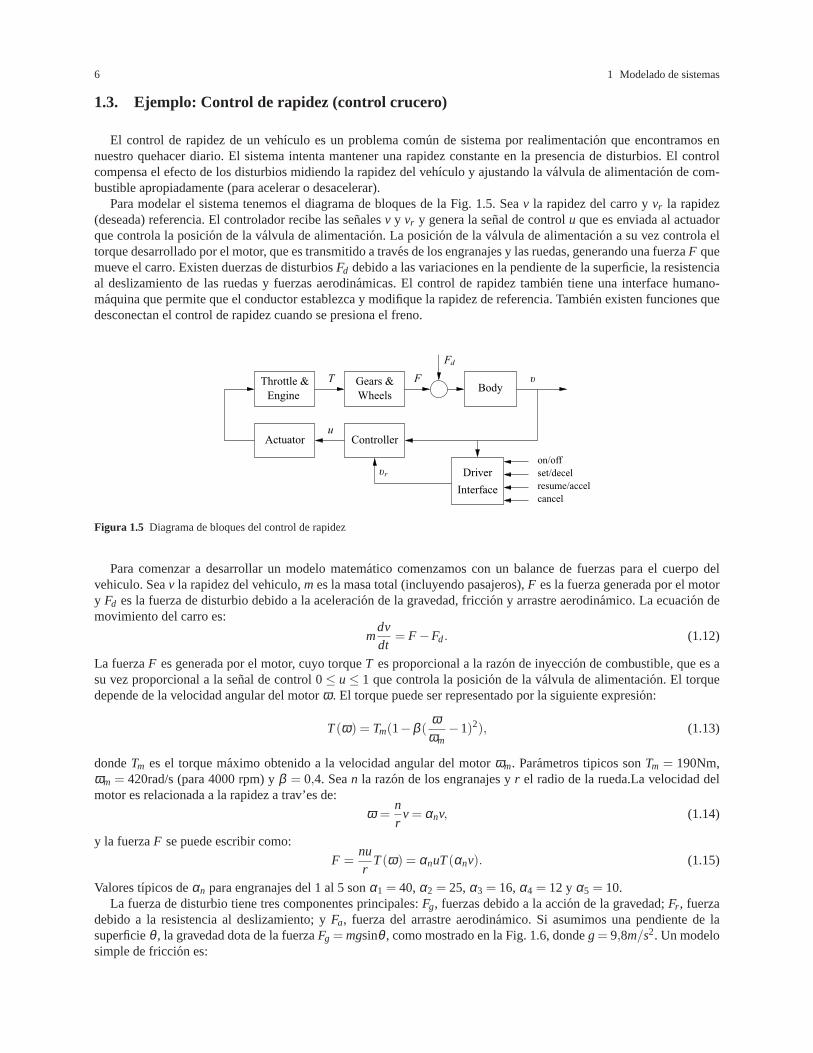
Para modelar el sistema tenemos el diagrama de bloques de la Fig. 1.5. Seav la rapidez del carro yvr la rapidez(deseada) referencia. El controlador recibe las senalesv y vr y genera la senal de controlu que es enviada al actuadorque controla la posicion de la valvula de alimentacion. La posicion de la valvula de alimentacion a su vez controla eltorque desarrollado por el motor, que es transmitido a traves de los engranajes y las ruedas, generando una fuerzaF quemueve el carro. Existen duerzas de disturbiosFd debido a las variaciones en la pendiente de la superficie, la resistenciaal deslizamiento de las ruedas y fuerzas aerodinamicas. El control de rapidez tambien tiene una interface humano-maquina que permite que el conductor establezca y modifique larapidez de referencia. Tambien existen funciones quedesconectan el control de rapidez cuando se presiona el freno.
Gears &
Actuator
vr
Controller
BodyThrottle &
Engine
Fd
v
cancel
resume/accel
set/decel
on/off
Driver
Interface
T F
u
Wheels
Figura 1.5 Diagrama de bloques del control de rapidez
Para comenzar a desarrollar un modelo matematico comenzamos con un balance de fuerzas para el cuerpo delvehiculo. Seav la rapidez del vehiculo,mes la masa total (incluyendo pasajeros),F es la fuerza generada por el motory Fd es la fuerza de disturbio debido a la aceleracion de la gravedad, friccion y arrastre aerodinamico. La ecuacion demovimiento del carro es:
mdvdt
= F−Fd. (1.12)
La fuerzaF es generada por el motor, cuyo torqueT es proporcional a la razon de inyeccion de combustible, que es asu vez proporcional a la senal de control 0≤ u≤ 1 que controla la posicion de la valvula de alimentacion. El torquedepende de la velocidad angular del motorω. El torque puede ser representado por la siguiente expresion:
T(ω) = Tm(1−β (ωωm−1)2), (1.13)
dondeTm es el torque maximo obtenido a la velocidad angular del motorωm. Parametros tipicos sonTm = 190Nm,ωm = 420rad/s (para 4000 rpm) yβ = 0,4. Sean la razon de los engranajes yr el radio de la rueda.La velocidad delmotor es relacionada a la rapidez a trav’es de:
ω =nr
v= αnv, (1.14)
y la fuerzaF se puede escribir como:
F =nur
T(ω) = αnuT(αnv). (1.15)
Valores tıpicos deαn para engranajes del 1 al 5 sonα1 = 40,α2 = 25,α3 = 16,α4 = 12 y α5 = 10.La fuerza de disturbio tiene tres componentes principales:Fg, fuerzas debido a la accion de la gravedad;Fr , fuerza
debido a la resistencia al deslizamiento; yFa, fuerza del arrastre aerodinamico. Si asumimos una pendiente de lasuperficieθ , la gravedad dota de la fuerzaFg = mgsinθ , como mostrado en la Fig. 1.6, dondeg= 9,8m/s2. Un modelosimple de friccion es:

1.4 Mas sobre modelado de sistemas 7
Fr = mgCrsgn(v),
Cr = 0,01 es coeficiente de friccion, sgn es la funcion signo dev (±1) o cero siv= 0. Un valor tipico deCr es 0.01.Finalmente, el arrastre aerodinamico es proporcional al cuadrado de la rapidez:
Fa =12
ρCdAv2,
dondeρ = 1,3 kg/m3 es la densidad del aire,Cd = 0,32 es el coeficiente de arrastre aerodinamico que depende de laforma del vehiculo,A= 2,4m2 es elarea frontal del carro.
Resumiendo, encontramso que el carro puede ser modelado por:
mdvdt
= αnuT(αnv)+−mgCrsgn(v)− 12
ρCdAv2−mgsinθ .
El modelo es un sistema dinamico de primer orden. El estado es la rapidez del vehiculo, que tambien es la salida. Laentrada es la senalu que controla la posicion de la valvula de alimentacion, y el disturbio e sla fuerzaFd, que pedendede la pendiente de la superficie. El sistema es no lineal puesto que el torque se define como en (1.13), el terminorelacionado a la fuerza gravitacional y el caracter no lineal de la friccion y arrastre aerodinamico.
gF
mg
F
θ
Figura 1.6 Efecto de las fuerzas gravitacionales
1.4. Mas sobre modelado de sistemas
El principal objetivo del analisis de sistemas es la prediccion de la forma en la que el sistema respondera a variasentradas y comoestas respuestas cambian para diferentes valores de los parametros del sistema. En la ausencia delmodelado de sistemas, los ingenieros se ven forzados a construir prototipos del sistema para poder probarlos. Losdatos obtenidos en las pruebas de los prototipos fısicos son muy valiosos, sin embargo los costos en tiempo y dineropara obtener estos datos muchas veces no permiten su realizacion. Adicionalmente, los modelos matematicos soninherentemente mas flexibles que los prototipos fısicos y permiten un rapido refinamiento de los disenos del sistemapara optimizar varias medidas de desempeno. En consecuencia, uno de los objetivos del analisis de sistemas es elestablecer un modelo matematico adecuado que pueda ser usado para obtener informacion equivalente a la que sepodra conseguir de varios prototipos fısicos diferentes. De esta forma, aun si un prototipo final es construido paraverificar el modelo matematico, el modelador se ha ahorrado un tiempo y dinero significativos.
Un modelo matematico es un conjunto de ecuaciones que describe completamente las relaciones entre las variablesdel sistema. Es usado como una herramienta para desarrollardisenos y algoritmos de control, y la tarea principal para laque sera usado tiene implicaciones basicas para la eleccion del modelo del sistema. De ahi que los modelos del sistemadeben ser lo mas simples posible, y cada modelo debe ser desarrollado con alguna aplicacion especıfica en mente. Dehecho, de esta forma se tendra diferentes modelos construidos para diferentes usos del mismo sistema. En el caso demodelos matematicos, diferentes tipos de ecuaciones seran usadas para describir al sistema en sus varias aplicaciones.
La Tabla 1 clasifica a los modelos del sistema de acuerdo a los cuatro criterios mas comunes: aplicacion del principiode superposicion, dependencia en coordenadas espaciales ası como en el tiempo, variacion de los parametros en eltiempo, y continuidad de las variables independientes. En base a estos criterios, los modelos de sistemas dinamicos sonclasificados como lineales y no lineales, concentrados y distribuidos, estacionarios invariantes en el tiempo o variantes
8 1 Modelado de sistemas
en el tiempo, contınuos o discretos, respectivamente. Cada clase de modelo estambien caracterizada por el tipo deecuacion matematica empleada en la descripcion del sistema.
Tipo de modelo Criterio de clasificacion Tipo de ecuacion de modeloNolineal Principio de superposicion no aplica Ecuaciones diferenciales no linealesLineal Principio de superposicion aplica Ecuaciones diferenciales linealesDistribuido Variables dependientes son funcion de co-
ordenadas espaciales y el tiempoEcuaciones diferenciales parciales
Concentrado Variables dependientes son independi-entes de las coordenadas espaciales
Ecuaciones diferenciales ordinarias
Variantes en el tiempoParametros del modelo varian en el tiem-po
Ecuaciones diferenciales con coeficientesque varian tiempo
Estacionario Parametros del modelo son constantes enel tiempo
Ecuaciones diferenciales con coeficientesconstantes
Contınuo Variables dependientes definidas sobrerango contınuo de variables independi-entes
Ecuaciones diferenciales
Discreto Variables dependientes definidas solo paradistintos valores de variables independi-entes
Ecuaciones por diferencias finitas
Cuadro 1.1 Clasificacion de modelos del sistema
1.5. Mas ejemplos
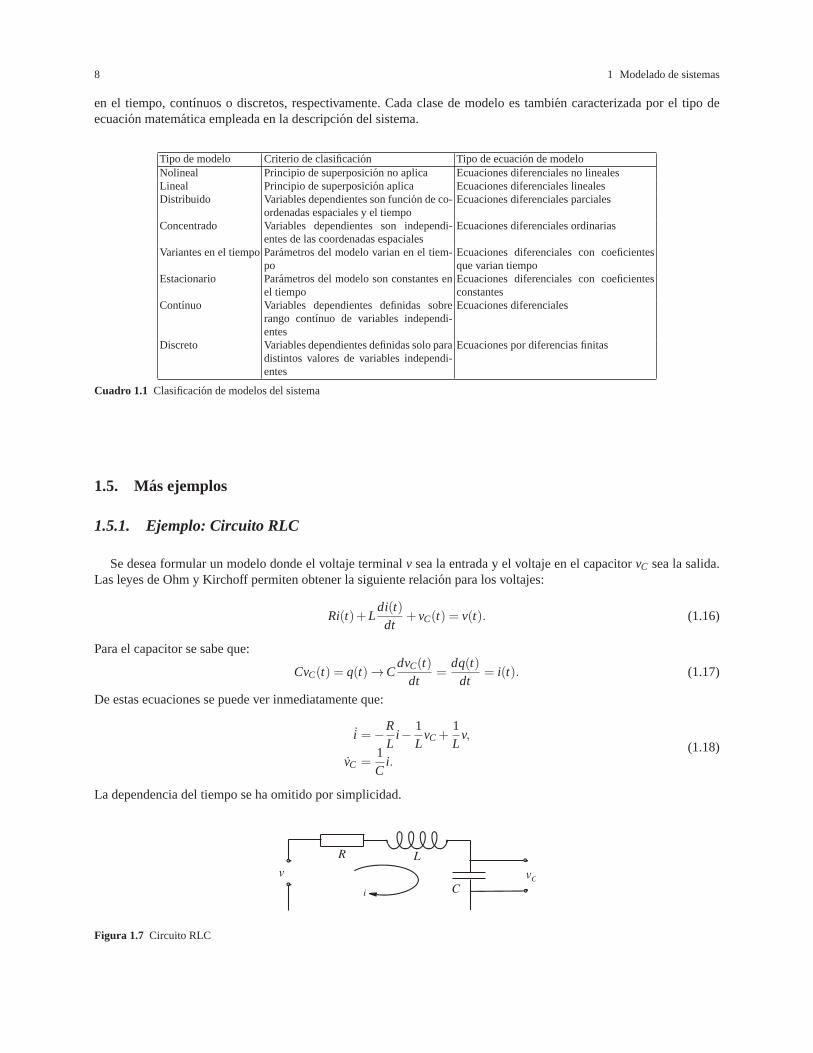
1.5.1. Ejemplo: Circuito RLC
Se desea formular un modelo donde el voltaje terminalv sea la entrada y el voltaje en el capacitorvC sea la salida.Las leyes de Ohm y Kirchoff permiten obtener la siguiente relacion para los voltajes:
Ri(t)+Ldi(t)dt
+vC(t) = v(t). (1.16)
Para el capacitor se sabe que:
CvC(t) = q(t)→CdvC(t)
dt=
dq(t)dt
= i(t). (1.17)
De estas ecuaciones se puede ver inmediatamente que:
i =−RL
i− 1L
vC+1L
v,
vC =1C
i.(1.18)
La dependencia del tiempo se ha omitido por simplicidad.
R L
C
vC
i
v
Figura 1.7 Circuito RLC

1.5 Mas ejemplos 9
El sistema puede ser descrito por las dos ecuaciones diferenciales de primer orden acopladas mostradas en (1.18).Reescribiendo las ecuaciones en la forma de espacio de estados:
[i
vC
]
=
−RL−1
L1C
0
[i
vC
]
+
[ 1L0
]
v. (1.19)
Si las variables de estado y las matrices del sistema son definidas como:
x=
[i
vC
]
, x=
[i
vC
]
,A=
−RL−1
L1C
0
,B=
[ 1L0
]
,u= v,
la ecuacion (1.19) puede ser reescrita en forma compacta como:
x= Ax+Bu.
Un diagrama de bloques del sistema es mostrado en la Fig. 1.8.Notar que los elementos del vector de estadosx, i(t) y
∫R
L---
1
L---
1
C----
1
L--- ∫
v t( ) i t( ) i t( ) v·c t( ) vc t( )+
__
Figura 1.8 Diagrama de bloques del circuito RLC
vC(t), son salidas de los dos integradores en el diagrama de bloques.Dado que el voltaje del capacitor es la salida. Una segunda ecuacion debe ser aumentada a la descripcion del
problema, la ecuacion de salida:y= vC =
[0 1]x. (1.20)
La combinacion de (1.19) y (1.20) es llamada el modelo espacio de estados del sistema.La transformada de Laplace de (1.18) lleva al modelo a la forma de funcion de transferencia del sistema:
G(s) =Vc(s)V(s)
=1
LCs2+RCs+1. (1.21)
1.5.2. Ejemplo: Motor DC y acoplamiento flexible
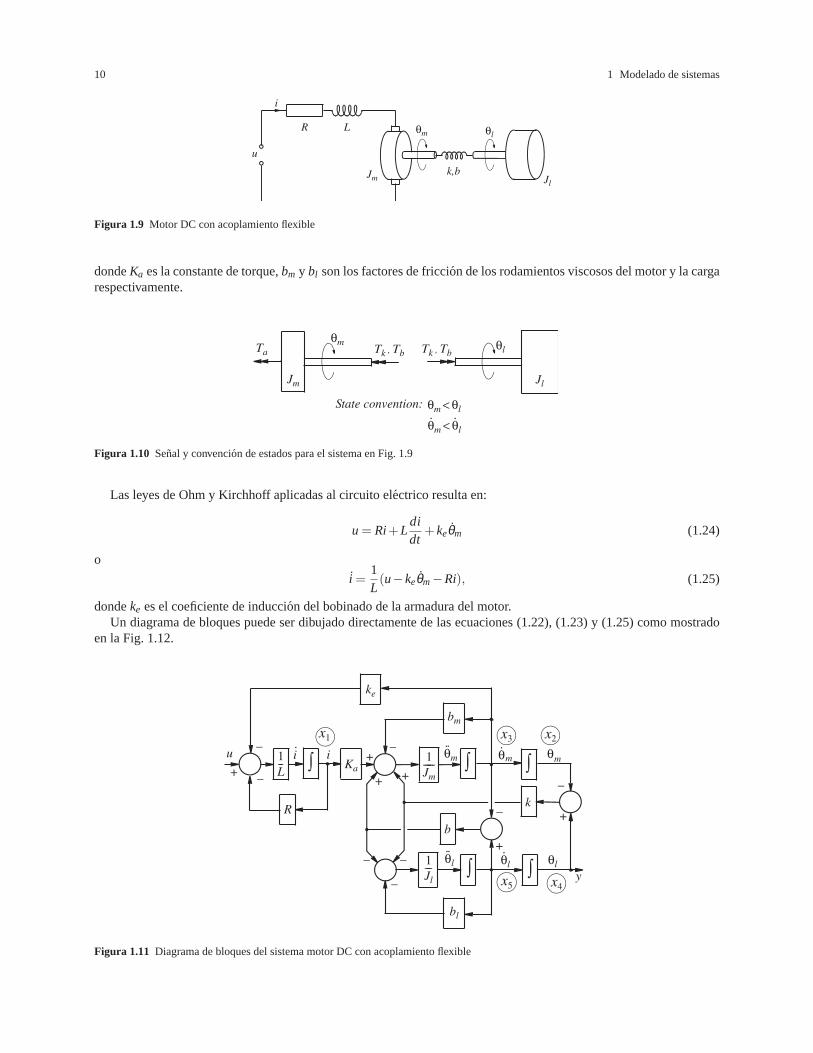
La Fig. 1.9 muestra un motor DC con acoplamiento flexible en eleje entre la inercia de la armadura del motor y lainercia de la carga.R y L son la resistencia y la inductancia del bobinado de la armadura respectivamente,k y b sonla constante de rigidez y el coeficiente de amortiguamiento (lineal) del acoplamiento flexible respectivamente y,Jm yJl son los momentos de inercia de la armadura del motor y carga respectivamente. El voltaje en la armadurau es laentrada del sistema y la posicion angular de la cargaθl es la salida.
Si las dos inercias son separadas una de la otra y los torques apropiados (Tk,Tb,Ta) aumentados como mostrado enla Fig. 1.10 (diagramas de cuerpo libre), usando la Segunda Ley de Newton (Momentos de Euler) en ambas inercias setiene:
Jmθm = Kai +k(θl −θm)+b(θl − θm)−bmθm, (1.22)
Jl θl =−k(θl −θm)−b(θl − θm)−bl θl , (1.23)
10 1 Modelado de sistemas
θm θl
k,b
R L
i
JlJm
u
Figura 1.9 Motor DC con acoplamiento flexible
dondeKa es la constante de torque,bm y bl son los factores de friccion de los rodamientos viscosos del motor y la cargarespectivamente.
θm θl
Jm Jl
State convention: θm < θl
θm < θl
· ·
Ta Tk , Tb Tk , Tb
Figura 1.10 Senal y convencion de estados para el sistema en Fig. 1.9
Las leyes de Ohm y Kirchhoff aplicadas al circuito electrico resulta en:
u= Ri+Ldidt
+keθm (1.24)
o
i =1L(u−keθm−Ri), (1.25)
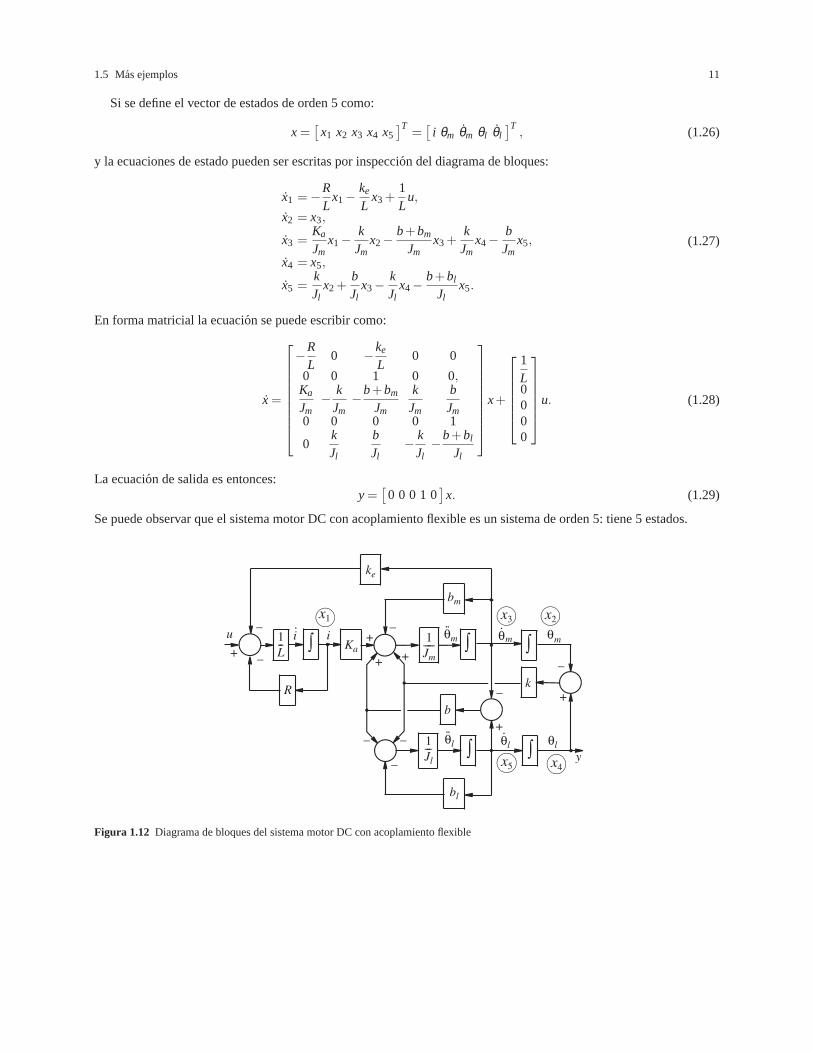
dondeke es el coeficiente de induccion del bobinado de la armadura del motor.Un diagrama de bloques puede ser dibujado directamente de las ecuaciones (1.22), (1.23) y (1.25) como mostrado
en la Fig. 1.12.
1
L---
1
Jm
------
1
Jl
---- ∫∫
∫∫∫
R
b
ke
bm
Ka
k
+
_
_
+
++
_
+
_+
_
_ _
θ·
mu i·
i θm
··
θl
··θl
·
θm
θl
bl
_ x5
x1 x2x3
x4y
Figura 1.11 Diagrama de bloques del sistema motor DC con acoplamiento flexible
1.5 Mas ejemplos 11
Si se define el vector de estados de orden 5 como:
x=[
x1 x2 x3 x4 x5]T
=[
i θm θm θl θl]T
, (1.26)
y la ecuaciones de estado pueden ser escritas por inspeccion del diagrama de bloques:
x1 =−RL
x1−ke
Lx3+
1L
u,
x2 = x3,
x3 =Ka
Jmx1−
kJm
x2−b+bm
Jmx3+
kJm
x4−bJm
x5,
x4 = x5,
x5 =kJl
x2+bJl
x3−kJl
x4−b+bl
Jlx5.
(1.27)
En forma matricial la ecuacion se puede escribir como:
x=
−RL
0 −ke
L0 0
0 0 1 0 0,Ka
Jm− k
Jm−b+bm
Jm
kJm
bJm
0 0 0 0 1
0kJl
bJl
− kJl−b+bl
Jl
x+
1L0000
u. (1.28)
La ecuacion de salida es entonces:y=
[0 0 0 1 0
]x. (1.29)
Se puede observar que el sistema motor DC con acoplamiento flexible es un sistema de orden 5: tiene 5 estados.
1
L---
1
Jm
------
1
Jl
---- ∫∫
∫∫∫
R
b
ke
bm
Ka
k
+
_
_
+
++
_
+
_+
_
_ _
θ·
mu i·
i θm
··
θl
··θl
·
θm
θl
bl
_ x5
x1 x2x3
x4y
Figura 1.12 Diagrama de bloques del sistema motor DC con acoplamiento flexible

12 1 Modelado de sistemas
1.5.3. Ejemplo: Diagrama de bloques del motor DC
El sistema electromecanico anterior tiene un acoplamiento flexible entre las dos inercias rotacionales. Si se omite laflexibilidad, esto significa que el acoplamiento es completamente rıgido, luego las ecuaciones del sistema tendran unaapariencia diferente al caso anterior.
Un acoplamiento rıgido significa que la constante de rigidez del resorte es infinita: k≈ ∞. No se puede modificarlos elementos de las matrices (1.27, 1.28) directamente debido a que algunos de ellos serian muy grande y esto nopuede ser posible. Luego, se debe retornar al conjunto de ecuaciones en (1.22) y (1.23) y modicarlas. Es obvio que lasdos posiciones angulares ahora seran igualesθm = θl = θ y el momento de inercia y los factores de friccion de losrodamientos seran la suma:J = Jm+Jl y bb = bm+bl . Las dos ecuaciones se reducen a una sola ecuacion diferencialde segundo orden:
Jθ = Kai−bnθ . (1.30)
Las ecuaciones de la parte electrica seran las mismas que antes y el nuevo diagrama de bloques es mostrado en la Fig.1.13.
1
L---
1
J-- ∫∫∫
R
ke
bb
Ka+
_
_ + +
_
θ·
u i· i θ
··θ
x1 x2x3
y
Figura 1.13 Diagrama de bloques del sistema reducido
El numero de estados del sistema reducido es 3 y el vector de estados es como sigue:
x=[
x1 x2 x3]T
=[
i θ θ]T
, (1.31)
y las ecuaciones de estado y salida resultan:
x =
−RL
0 −ke
L0 0 1,
Ka
J0 −bb
J
x+
1L00
u
y =[
0 1 0]x.
(1.32)
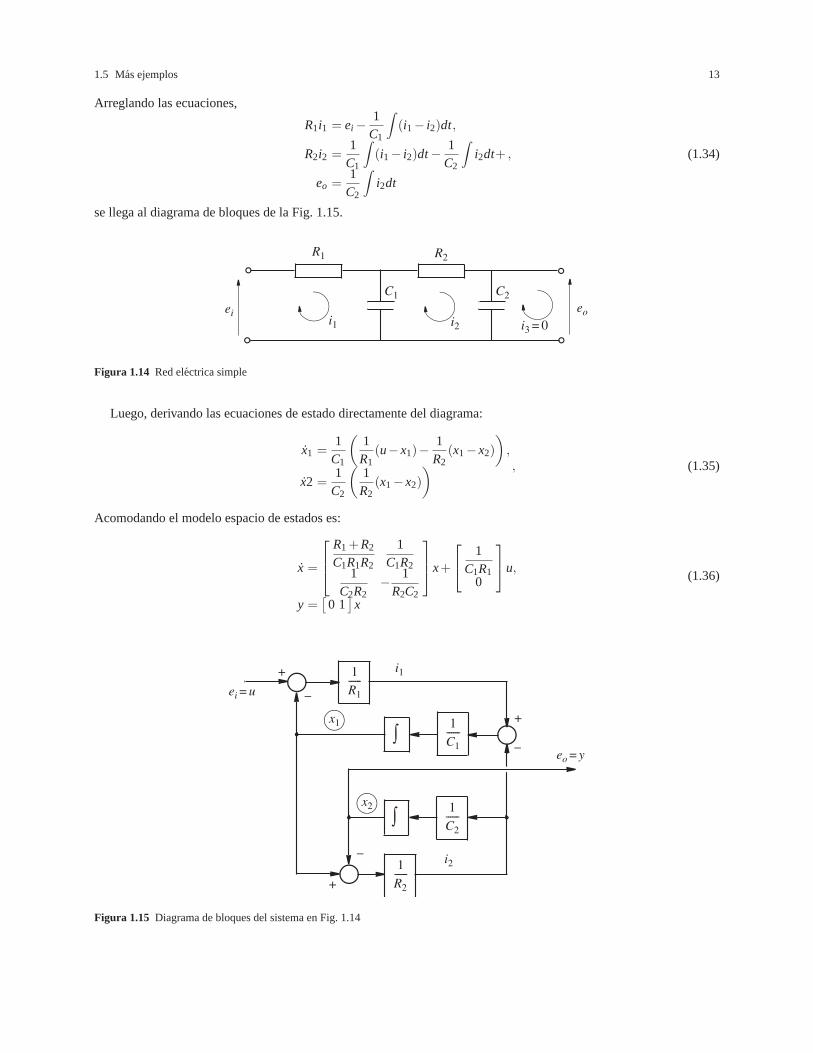
1.5.4. Ejemplo: Doble filtro pasa-baja RC
A continuacion se mostrara como derivar un modelo espacio de estados de un la red electrica pasiva mostrada en laFig. 1.14. Usando la leyes de Ohm y Kirchhoff en los tres lazosde corriente resulta:
ei = R1i1+1
C1
∫
(i1− i2)dt,
0 =1
C1
∫
(i2− i1)dt+1
C2
∫
i2dt+R2i2
−eo =− 1C2
∫
i2dt
. (1.33)
1.5 Mas ejemplos 13
Arreglando las ecuaciones,
R1i1 = ei−1
C1
∫
(i1− i2)dt,
R2i2 =1
C1
∫
(i1− i2)dt− 1C2
∫
i2dt+
eo =1
C2
∫
i2dt
, (1.34)
se llega al diagrama de bloques de la Fig. 1.15.
C1 C2
R1 R2
ei eo
i3 = 0i2i1
Figura 1.14 Red electrica simple
Luego, derivando las ecuaciones de estado directamente deldiagrama:
x1 =1
C1
(1R1
(u−x1)−1R2
(x1−x2)
)
,
x2 =1
C2
(1R2
(x1−x2)
) , (1.35)
Acomodando el modelo espacio de estados es:
x =
R1+R2
C1R1R2
1C1R2
1C2R2
− 1R2C2
x+
1C1R1
0
u,
y =[
0 1]x
(1.36)
1
R1
------
1
R2
------
∫
∫
1
C1
------
1
C2
------
+
_
+
_
+
_
eo = y
ei = u
i1
i2
x1
x2
Figura 1.15 Diagrama de bloques del sistema en Fig. 1.14
14 1 Modelado de sistemas
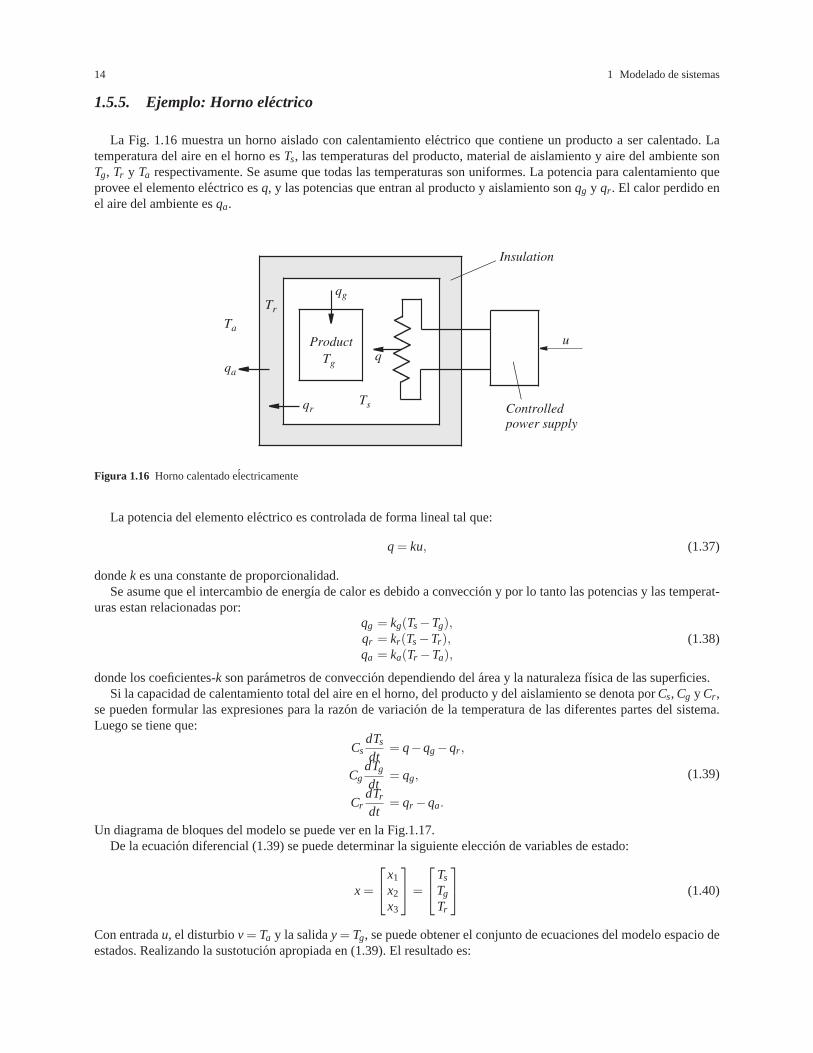
1.5.5. Ejemplo: Horno electrico
La Fig. 1.16 muestra un horno aislado con calentamiento electrico que contiene un producto a ser calentado. Latemperatura del aire en el horno esTs, las temperaturas del producto, material de aislamiento y aire del ambiente sonTg, Tr y Ta respectivamente. Se asume que todas las temperaturas son uniformes. La potencia para calentamiento queprovee el elemento electrico esq, y las potencias que entran al producto y aislamiento sonqg y qr . El calor perdido enel aire del ambiente esqa.
q
qg
qr
qa
Ts
Tg
Ta
Tr
Controlled
power supply
Insulation
Product u
Figura 1.16 Horno calentado electricamente
La potencia del elemento electrico es controlada de forma lineal tal que:
q= ku, (1.37)
dondek es una constante de proporcionalidad.Se asume que el intercambio de energıa de calor es debido a conveccion y por lo tanto las potencias y las temperat-
uras estan relacionadas por:qg = kg(Ts−Tg),qr = kr(Ts−Tr),qa = ka(Tr −Ta),
(1.38)
donde los coeficientes-k son parametros de conveccion dependiendo delarea y la naturaleza fısica de las superficies.Si la capacidad de calentamiento total del aire en el horno, del producto y del aislamiento se denota porCs, Cg y Cr ,
se pueden formular las expresiones para la razon de variacion de la temperatura de las diferentes partes del sistema.Luego se tiene que:
CsdTs
dt= q−qg−qr ,
CgdTg
dt= qg,
CrdTr
dt= qr −qa.
(1.39)
Un diagrama de bloques del modelo se puede ver en la Fig.1.17.De la ecuacion diferencial (1.39) se puede determinar la siguiente eleccion de variables de estado:
x=
x1
x2
x3
=
Ts
Tg
Tr
(1.40)
Con entradau, el disturbiov= Ta y la saliday= Tg, se puede obtener el conjunto de ecuaciones del modelo espacio deestados. Realizando la sustotucion apropiada en (1.39). El resultado es:
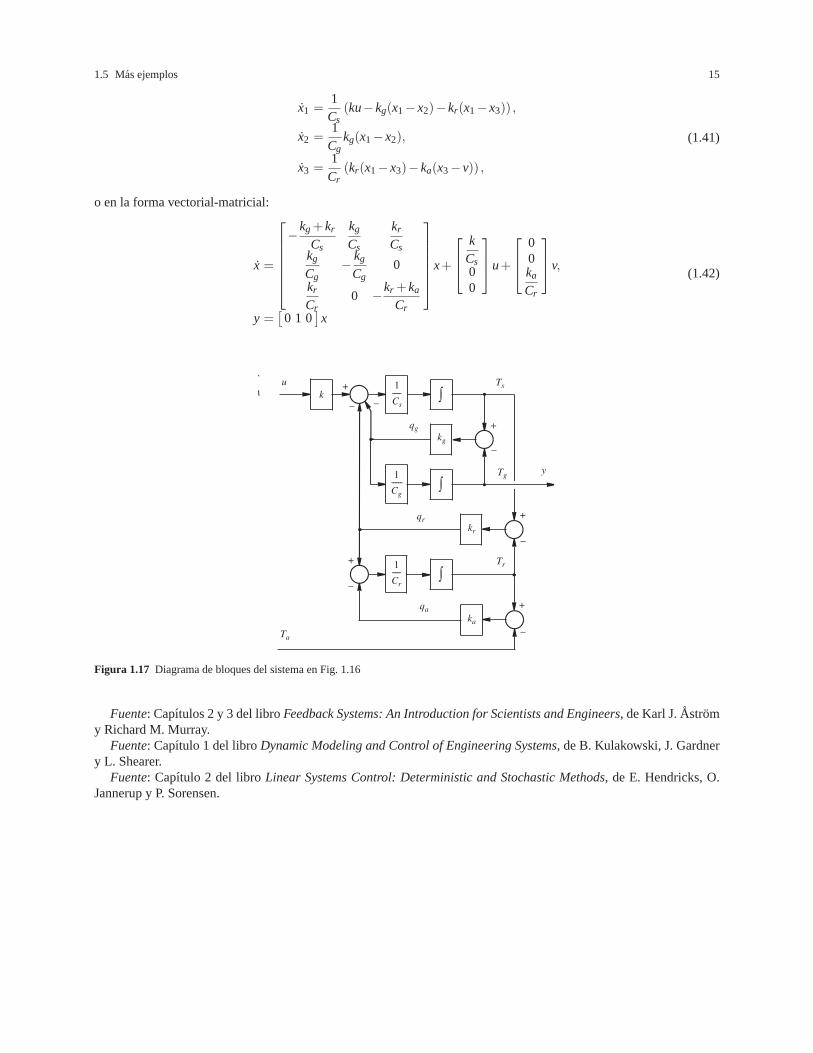
1.5 Mas ejemplos 15
x1 =1Cs
(ku−kg(x1−x2)−kr(x1−x3)) ,
x2 =1
Cgkg(x1−x2),
x3 =1Cr
(kr(x1−x3)−ka(x3−v)) ,
(1.41)
o en la forma vectorial-matricial:
x =
−kg+kr
Cs
kg
Cs
kr
Cskg
Cg− kg
Cg0
kr
Cr0 −kr +ka
Cr
x+
kCs00
u+
00ka
Cr
v,
y =[
0 1 0]x
(1.42)
∫
∫
kg
kr
ka
∫
1
Cs
-----
1
Cr
-----
1
Cg
------
k
+
_
+
_
+
_
+
_ _
+
_
Ts
Tg
Tr
Ta
u
y
qg
qr
qa
Block diagram of
the oven production system
Figura 1.17 Diagrama de bloques del sistema en Fig. 1.16
Fuente: Capıtulos 2 y 3 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astromy Richard M. Murray.
Fuente: Capıtulo 1 del libroDynamic Modeling and Control of Engineering Systems, de B. Kulakowski, J. Gardnery L. Shearer.
Fuente: Capıtulo 2 del libroLinear Systems Control: Deterministic and Stochastic Methods, de E. Hendricks, O.Jannerup y P. Sorensen.


Capıtulo 2Linealizacion
El reemplazar un sistema no lineal por su aproximacion lineal se denominalinealizacion. Una motivacion parala linealizacion es que el comportamiento dinamico de muchos sistemas no lineales dentro de un rango de variablespuede ser aproximado a modelos de sistemas lineales. Siendoese el caso, podemos usar tecnicas bien desarrolladasde analisis y sıntesis de sistemas lineales para analizar un sistema no lineal. Cabe destacar que se debe tener muchocuidado cuando se realiza el analisis de sistemas linealizados ya que la intencion no es introducir errores al analizarsistemas no lineales.
Consideremos el caso de un sistema (elemento no lineal) con una variable de estadox y una variable de saliday queestan relacionadas por la siguiente ecuacion:
y= h(x), (2.1)
donde la funcionh : R 7→R es contınua y diferenciable; esto esh∈ C 1. Consideremosxo como el punto de operacion.Si expandemosh en la serie de Taylor alrededor del puntoxo se obtiene:
y = h(x),
= h(xo)+dh(xo)
dx(x−xo)+ terminos de alto orden.
(2.2)
La linealizacion deh(x) alrededor del puntoxo consiste en reemplazarh por una aproximacion lineal de la forma:
y = h(xo)+dh(xo)
dx(x−xo)
y = yo+dh(xo)
dx(x−xo),
(2.3)
dondeyo = h(xo). Si y= y−yo y x= x−xo. Luego, podemos reescribir (2.3) como:
y=dh(xo)
dxx, (2.4)
y sobre un rango pequeno dex, la linea (2.3) es una buena aproximacion de la curvay= h(x) en la vecindad del puntode operacion xo, ver Fig. 2.1 para una ilustracion de la aproximacion.
Si h : Rn 7→ R, esto es,y= h(x1,x2, ...,xn), que significa que la variable dependiente depende de variasvariables -se puede aplicar el mismo principio. Sea:
xo =[x1o x2o ... xno
]T(2.5)
el punto de operacion. La expansion de la serie de Taylor deh alrededor del punto de operacion xo resulta en:
y−h(xo) = ∇h(xo)T(x−xo)+ terminos de alto orden, (2.6)
donde:
∇h(xo)T =
[ ∂h∂x1
∣∣∣∣x=xo
∂h∂x2
∣∣∣∣x=xo
...∂h∂xn
∣∣∣∣x=xo
]
. (2.7)
17

18 2 Linealizacion
y
y0
x0
y h(x)
x
y y0 (x x0)dh(x0)
dx
Figura 2.1 Aproximacion lineal de la funcion y= h(x)
Geometricamente, la linealizacion deh alrededor dexo se puede pensar como el localizar un plano tangente sobre unasuperficie no lineal en el punto de operacion xo, como mostrado en la Fig. 2.2.
Tangent
plane
h(x0)
x0
x2
x1
y h(x)
Figura 2.2 Plano tangente como aproximacion lineal de una funcion de dos variables.
2.1. Linealizando ecuaciones diferenciales
Consideremos ahora un sistema dinamico modelado por un conjunto de ecuaciones diferencialesno lineales:
dx1
dt= f1(x1,x2, ...,xn,u1,u2, ...,um),
dx2
dt= f2(x1,x2, ...,xn,u1,u2, ...,um),
......
dxn
dt= fn(x1,x2, ...,xn,u1,u2, ...,um).
. (2.8)
Asumiendo que las funcionesfi , i = 1,2, ...,n, son contınuas y diferenciables. El conjunto de las ecuaciones arribamostradas se puede representar en la forma vectorial por:
dxdt
= f (x,u). (2.9)

2.1 Linealizando ecuaciones diferenciales 19
Seaue=[u1e u2e ... une
]Tuna entrada constante que fuerza al sistema (2.9) a que se asiente en unestado de equilibrio
xe =[x1e x2e ... xne
]T; esto es,ue y xe satisfacen:
f (xe,ue) = 0. (2.10)
Los estados de equilibrio son llamados tambien puntos estacionarios, puntos constantes o puntos de reposo, ya que siel sistema se ubica inicialmente enx= xe, luego permanecera enx(t) = xe para todo tiempot ≥ 0.
Por lo general cuando hablamos de la existencia de unue 6= 0 nos referimos a condiciones de operacion puesto queel sistema necesitarıa de esa inyeccion ya sea de fuerza (torque, etc.) para mantenerse en el puntode equilibrio.
Cuando analizamos la dinamica de un sistema no forzado, hacemosue = 0 y luego buscamos el punto de equilibrio
xe para el sistema dinamicodxdt
= f (x), es decir la solucion def (xe) = 0. En el caso de un sistema dinamico no forzado,
este puede presentar cero, uno o mas puntos de equilibrio.Para estudiar y analizar el comportamientolocal del sistema alrededor del punto de equilibrio (xe,ue), se supone que
tantox−xe comou−ue son pequenos, tal que perturbaciones no lineales pueden ser ignoradas en comparacion a losterminos lineales (de orden bajo). Este argumento es similara cuando usamos aproximaciones deangulos pequenos,reemplazando sinθ conθ y cosθ con 1 paraθ cerca a cero.
Si ahora perturbamos el estado de equilibrio haciendo:
x= xe+ x, u= ue+ u. (2.11)
La expansion de la serie de Taylor resulta en:
ddt
x = f (xe+ x,ue+ u),
= f (xe,ue)+∂ f∂x
(xe,ue)x+∂ f∂u
(xe,ue)u+ terminos de alto orden,(2.12)
donde:
∂ f∂x
(xe,ue) =
∂ f1∂x1
...∂ f1∂xn
......
∂ fn∂x1
...∂ fn∂xn
∣∣∣∣∣∣∣∣∣∣x= xe,u= ue
y∂ f∂u
(xe,ue) =
∂ f1∂u1
...∂ f1∂um
......
∂ fn∂u1
...∂ fn∂um
∣∣∣∣∣∣∣∣∣∣x= xe,u= ue
(2.13)
son las matrices Jacobianas def con respecto ax y u, evaluadas en el punto de equilibrio,(xe,ue). Notese que:
ddt
x=ddt
xe+ddt
x=ddt
x, (2.14)
porquexe es una constante. Adicionalmente,f (xe,ue) = 0, luego definiendoA ∈ Rn×n y B ∈ R
n×m de la siguienteforma:
A=∂ f∂x
(xe,ue) y B=∂ f∂u
(xe,ue). (2.15)
Finalmente, eliminando los terminos de orden alto, se llega a la siguiente aproximacion lineal:
ddt
x= Ax+Bu. (2.16)
De forma similar, si las salidas del modelo del sistema no lineal son de la forma:
y1 = h1(x1,x2, ...,xn,u1,u2, ...,um),y2 = h2(x1,x2, ...,xn,u1,u2, ...,um),
...yp = hp(x1,x2, ...,xn,u1,u2, ...,um).
. (2.17)
20 2 Linealizacion
o en notacion vectorial:y= h(x,u), (2.18)
entonces la expansion de la serie de Taylor puede ser usada nuevamente para llevar a la aproximacion lineal de laecuacion de salida del sistema. Sea:
y= ye+ y, (2.19)
luego obtenemos:y=Cx+Du, (2.20)
donde:
C=∂h∂x
(xe,ue) =
∂h1
∂x1...
∂h1
∂xn...
...∂hp
∂x1...
∂hp
∂xn
∣∣∣∣∣∣∣∣∣∣x= xe,u= ue
∈ Rp×n, (2.21)
y,
D =∂h∂u
(xe,ue) =
∂h1
∂u1...
∂h1
∂um...
...∂hp
∂u1...
∂hp
∂um
∣∣∣∣∣∣∣∣∣∣ x= xe,u= ue
∈ Rp×m (2.22)
son las matrices Jacobianas deh con respecto ax y u, evaluadas en el punto de operacion (xe,ue).El hecho de que modelos lineales puedan ser usados para estudiar el comportamiento de un sistema no lineal cerca
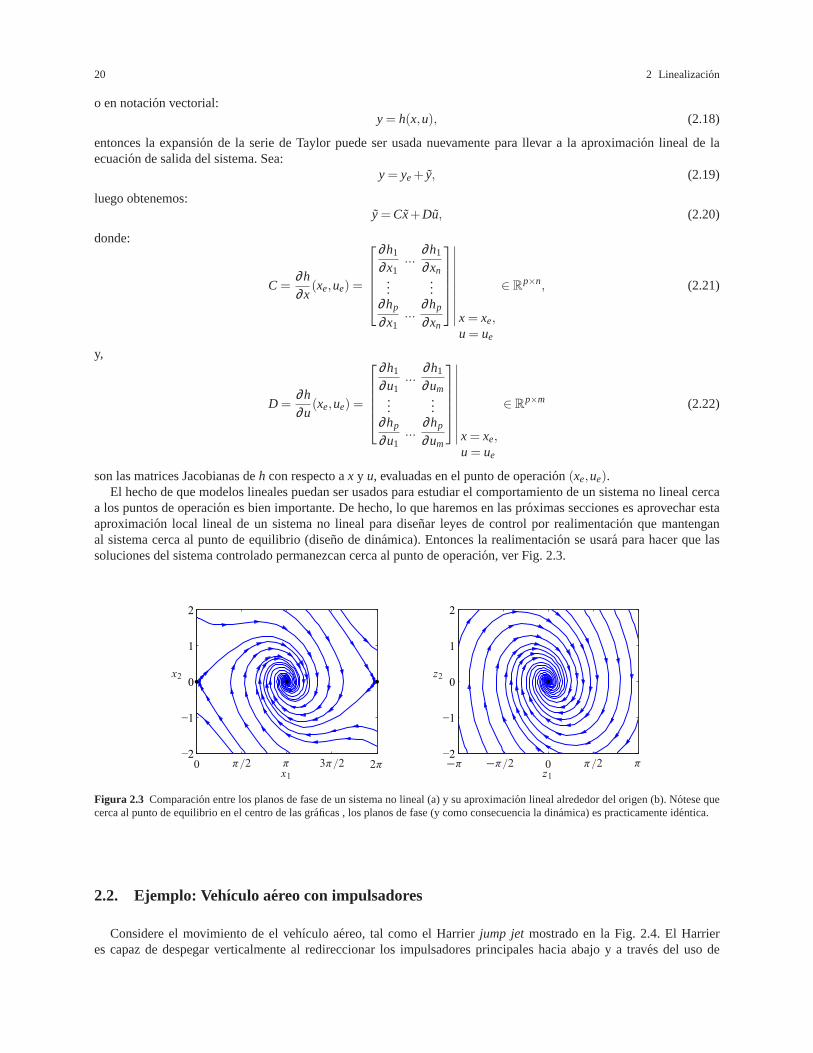
a los puntos de operacion es bien importante. De hecho, lo que haremos en las proximas secciones es aprovechar estaaproximacion local lineal de un sistema no lineal para disenar leyes de control por realimentacion que mantenganal sistema cerca al punto de equilibrio (diseno de dinamica). Entonces la realimentacion se usara para hacer que lassoluciones del sistema controlado permanezcan cerca al punto de operacion, ver Fig. 2.3.
−2
−1
0
1
2
x1
x2
0 π/2 π 2π3π/2−2
−1
0
1
2
z1
z2
−π −π/2 0 π/2 π
Figura 2.3 Comparacion entre los planos de fase de un sistema no lineal (a) y su aproximacion lineal alrededor del origen (b). Notese quecerca al punto de equilibrio en el centro de las graficas , los planos de fase (y como consecuencia la dinamica) es practicamente identica.
2.2. Ejemplo: Vehıculo aereo con impulsadores
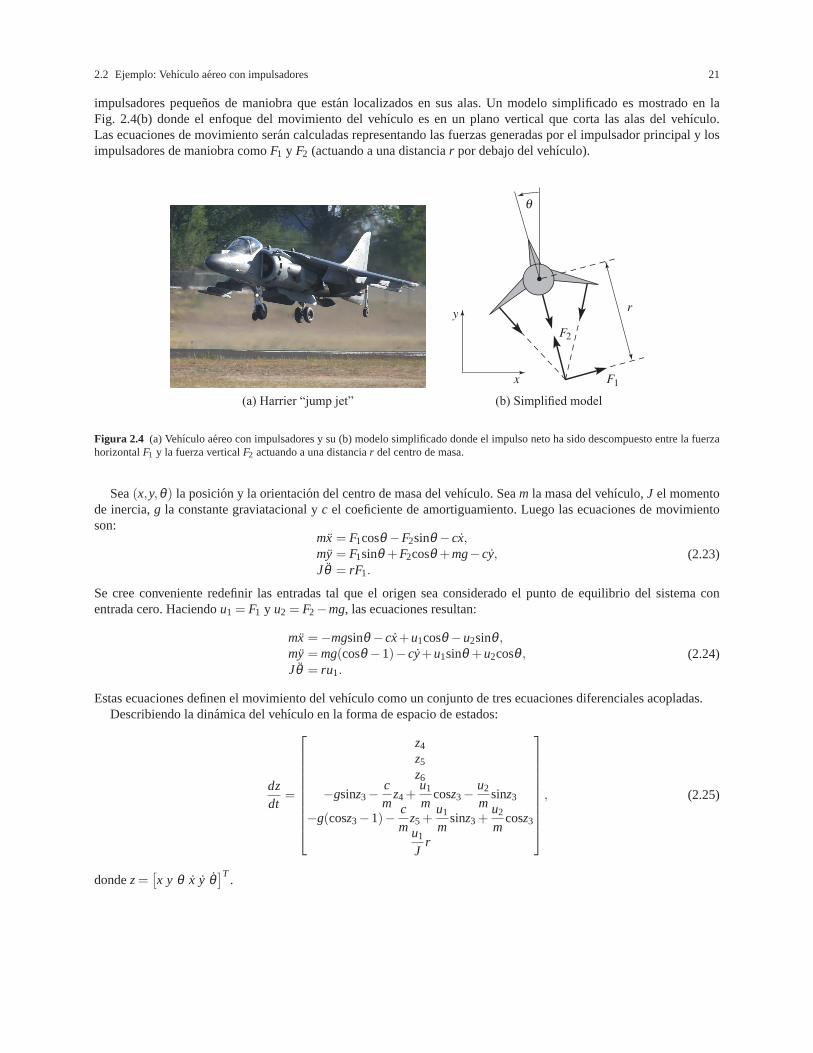
Considere el movimiento de el vehıculo aereo, tal como el Harrierjump jet mostrado en la Fig. 2.4. El Harrieres capaz de despegar verticalmente al redireccionar los impulsadores principales hacia abajo y a traves del uso de
2.2 Ejemplo: Vehıculo aereo con impulsadores 21
impulsadores pequenos de maniobra que estan localizados en sus alas. Un modelo simplificado es mostrado en laFig. 2.4(b) donde el enfoque del movimiento del vehıculo es en un plano vertical que corta las alas del vehıculo.Las ecuaciones de movimiento seran calculadas representando las fuerzas generadas por el impulsador principal y losimpulsadores de maniobra comoF1 y F2 (actuando a una distanciar por debajo del vehıculo).
(a) Harrier “jump jet”
r
x
y
θ
F1
F2
(b) Simplified model
Figura 2.4 (a) Vehıculo aereo con impulsadores y su (b) modelo simplificado donde el impulso neto ha sido descompuesto entre la fuerzahorizontalF1 y la fuerza verticalF2 actuando a una distanciar del centro de masa.
Sea(x,y,θ) la posicion y la orientacion del centro de masa del vehıculo. Seam la masa del vehıculo,J el momentode inercia,g la constante graviatacional yc el coeficiente de amortiguamiento. Luego las ecuaciones de movimientoson:
mx = F1cosθ −F2sinθ −cx,my = F1sinθ +F2cosθ +mg−cy,Jθ = rF1.
(2.23)
Se cree conveniente redefinir las entradas tal que el origen sea considerado el punto de equilibrio del sistema conentrada cero. Haciendou1 = F1 y u2 = F2−mg, las ecuaciones resultan:
mx =−mgsinθ −cx+u1cosθ −u2sinθ ,my = mg(cosθ −1)−cy+u1sinθ +u2cosθ ,Jθ = ru1.
(2.24)
Estas ecuaciones definen el movimiento del vehıculo como un conjunto de tres ecuaciones diferenciales acopladas.Describiendo la dinamica del vehıculo en la forma de espacio de estados:
dzdt
=
z4
z5
z6
−gsinz3−cm
z4+u1
mcosz3−
u2
msinz3
−g(cosz3−1)− cm
z5+u1
msinz3+
u2
mcosz3
u1
Jr
, (2.25)
dondez=[x y θ x y θ
]T.

22 2 Linealizacion
2.2.1. Modelo lineal del vehıculo aereo con impulsadores
Suponiendo queu1 = 0 y u2 = 0, la dinamica del sistema se simplica a:
dzdt
=
z4
z5
z6
−gsinz3− cmz4
−g(cosz3−1)− cmz5
0
. (2.26)
Los puntos de equilibrio del sistema estan dados cuando se hacen cero las velocidades ˙x, y y θ y escogiendo lassiguientes variables que satisfagan la siguiente ecuacion:
[00
]
=
[−gsinz3e
−g(cosz3e−1)
]
,→ z3e = θe = 0. (2.27)
Entonces, el punto de equilibrio corresponde a la posicion vertical del vehıculo. Notese quexe y ye no estan especifi-cados. Esto ocurre porque nosotros podriamos trasladar el sistema a una nueva posicion (mas arriba) y todavia obtenerun punto de equilibrio.
Calculando la matriz de estadosA y la matriz de entradaB:
A=∂ f∂z
∣∣∣∣ze
=
0 0 0 1 0 00 0 0 0 1 00 0 0 0 0 10 0−g −c/m 0 00 0 0 0 −c/m 00 0 0 0 0 0
, (2.28)
B=∂ f∂u
∣∣∣∣ze
=
0 00 00 0
1/m 00 1/m
r/J 0
. (2.29)
Luego el sistema linealizado del vehıculo aereo con impulsores puede ser escrito como:
ddt
x=
0 0 0 1 0 00 0 0 0 1 00 0 0 0 0 10 0−g −c/m 0 00 0 0 0 −c/m 00 0 0 0 0 0
x+
0 00 00 0
1/m 00 1/m
r/J 0
u (2.30)
2.3. Ejemplo: manipulador robotico
(El siguiente problema ha sido adaptado de Snyder, W.E.,Industrial Robots: Computer interfacing and control) Enla Fig. 2.5 se muestra el manipulador robotico θ − r. Un representacion esquematica del robot es presentada en la Fig.2.7 donde se asume una configuracion de masas concentradas. La masam1 = 10kg representa la masa del cilindroexterior y se ubica en el centro de masa del mismo. La constante r1 = 1m designa la distancia fija entre el centrode masa del cilindro exterior y el centro de rotacion. La masa de la carga es representada porm2 = 3kg y se asumeque esta localizada al final de un piston de un brazo telescopico cuya distancia radialr es medida a partir del centro

2.3 Ejemplo: manipulador robotico 23
de rotacion. El angulo de rotacion del brazo manipulador esθ . Se asume que las entradas al sistema son el torqueTθaplicado en el centro de rotacion en la direccion delanguloθ y la fuerza traslacional (radial)Fr aplicada en la direccionr. Despreciar la masa del cilindro interior. Usarg= 10m/sec2 como aceleracion de la gravedad.
Figura 2.5 Manipulador robotico θ − r Figura 2.6 Representacion esquematica manipuladorθ − r
Construiremos las ecuaciones de movimiento del sistema en base a las ecuaciones de Lagrange y luego las repre-sentaremos en la forma espacio de estados.
2.3.1. Ecuaciones de movimiento usando Lagrange
Energıa cinetica (T) Primero encontramos la energia cinetica total del sistema. Para esto definimos las posiciones dela masam1:
x1 = r1cosθ ,y1 = r1sinθ .
Notese quer1 es una constante y que las posiciones de la masam1 hacen referencia al movimiento traslacional queexperimenta el centro de masa del cilindro externo (masa concentrada). Diferenciandox1 y y1 con respecto al tiempose obtiene:
x1 =−r1θsinθ ,y1 = r1θcosθ .
La magnitud del cuadrado del vector velocidad de la masam1 es:
v21 = x1
2+ y12 = r2
1θ 2sin2θ + r21θ 2cos2θ = r2
1θ 2.
Entonces, la energia cinetica de la masam1 es:T1 =12m1v2
1 =12m1r2
1θ 2.Ahora derivaremos una expresion para la energia cinetica de la segunda masa. La posicion de la masam2 es:
x2 = rcosθ ,y2 = rsinθ .
Notese quer no es una constante y que la posiciones de la masam2 hacen referencia al movimiento traslacional queexperimenta la masa de carga (masa concentrada). Diferenciandox2 y y2 con respecto al tiempo se obtiene:
x2 = rcosθ − r θsinθ ,y2 = rsinθ + r θcosθ .
La magnitud del cuadrado del vector velocidad de la masam2 es:
v22 = x2
2+ y22 = (rcosθ − r θsinθ)2+(rsinθ + r θcosθ)2 = r2+ r2θ 2.

24 2 Linealizacion
Entonces, la energıa cinetica de la masam2 es:T2 =12m2v2
2 =12m2(r2+ r2θ 2).
Energıa potencial (V) Ahora encontraremos la energıa potencial del sistema. La energıa potencial de la masam1 es:
V1 = m1gr1sinθ .
La energıa potencial de la masam2 es:V2 = m2grsinθ .
Ecuaciones de movimientoLa funcion Lagrangiana (o Lagrangiano) para el sistema es:
L = T−V =12
m1r21θ 2+
12
m2(r2+ r2θ 2)−m1gr1sinθ −m2grsinθ .
El manipulador posee dos grados de libertad (r y θ ). Luego, tenemos dos ecuaciones de movimiento para el sistema:
ddt
(∂L
∂ θ
)
− ∂L
∂θ= Tθ
ddt
(∂L
∂ r
)
− ∂L
∂ r= Fr
La primera ecuacion de movimiento resulta en:
m1r21θ +m2r2θ +2m2r r θ +gcosθ(m1r1+m2r) = Tθ .
La segunda ecuacion de movimiento viene a ser:
m2r−m2r θ 2+m2gsinθ = Fr .
2.3.2. Representacion espacio de estados
Definiendo las siguientes variables:
z1 = θ , z2 = θ , z3 = r, z4 = r.
Luego podemos escribir:
ddt
z1
z2
z3
z4
︸ ︷︷ ︸
dzdt
=
z2−2m2z2z3z4−gcosz1(m1r1+m2z3)+u1
m1r21+m2z2
3z4
z22z3−gsinz1+
u2
m2
︸ ︷︷ ︸
f (z,u)
, (2.31)
dondeu1 = Tθ y u2 = Fr . Asumiendo que la salida esta dada por la posicion de la masa de carga,v1 = x2 = rcosθ yv2 = y2 = rsinθ se tiene:
[v1
v2
]
︸︷︷︸
v
=
[z3cosz1
z3sinz1
]
︸ ︷︷ ︸
h(z,u)
, (2.32)
2.3 Ejemplo: manipulador robotico 25
2.3.3. Linealizacion
Para encontrar el modelo linealizado del manipulador robotico debemos calcular primero los puntos (estados) deequilibrio.Puntos de equilibrio para entradas nulasConsiderando entradas nulas (u1 = 0 y u2 = 0), el modelo del sistemaresulta en:
dzdt
=
z2−gcosz1(m1r1+m2z3)
m1r21+m2z2
3z4
−gsinz1
, (2.33)
e igualando las derivadas a cero, la ecuacion que debemos resolver es la siguiente:
[00
]
=
−gcosz1(m1r1+m2z3)
m1r21+m2z2
3−gsinz1
, (2.34)
como no existe unz1 tal que cosz1 = 0 y sinz1 = 0 simultaneamente, esto significa que el modelo no forzado que hemosconsiderado para el manipulador robotico no presenta puntos de equilibrioze; es decir, el sistema dinamico analizadono presenta condiciones inicialesz(0) que tal que el sistema permanecera en ese puntoz(0) indefinidamente (¿coincideesto con lo que te dice tu intuicion?).Punto de operacion (entradas constantes)Considerando entradas constantes (u1 = u1e y u2 = u2e) e igualando lasderivadas a cero resulta:
0000
=
z2e−gcosz1e(m1r1+m2z3e)+u1e
m1r21+m2z2
3z4e
−gsinz1e+u2e
m2
, (2.35)
Luego, el modelo del sistema sera linealizado alrededor del punto de equilibrio:
ze =[
z1e 0 z3e 0]T
,
dondez1e y z3e satisfacen las siguientes ecuaciones:
cosz1e =u1e
g(m1r1+m2z3e)
sinz1e =u2e
gm2
.
Calculando los elementos de las matrices Jacobianas del sistema no lineal definido en (2.31) tenemos:
∂ f1∂z1
= 0∂ f1∂z2
= 1
∂ f1∂z3
= 0∂ f1∂z4
= 0
∂ f2∂z1
=gsinz1(m1r1+m2z3)
m1r21 +m2z2
3
∂ f2∂z2
=−2m2z3z4
m1r21 +m2z2
3∂ f2∂z3
=−m2(2z2z4+gcosz1)(m1r2
1 +m2z23)− (−2m2z2z3z4−gcosz1(m1r1+m2z3)+u1)(2m2z3)
(m1r21 +m2z2
3)2
∂ f2∂z4
=−2m2z2z3
m1r21 +m2z2
3∂ f3∂z1
= 0∂ f3∂z2
= 0
∂ f3∂z3
= 0∂ f3∂z4
= 1
∂ f4∂z1
=−gcosz1∂ f4∂z2
= 2z3
∂ f4∂z3
= z22
∂ f4∂z4
= 0
(2.36)
26 2 Linealizacion
y,∂ f1∂u1
= 0∂ f1∂u2
= 0
∂ f2∂u1
=1
m1r21+m2z2
3
∂ f2∂u2
= 0
∂ f3∂u1
= 0∂ f3∂u2
= 0
∂ f4∂u1
= 0∂ f4∂u2
=1
m2
(2.37)
Adicionalmente, para la matriz de salida (2.32):
∂h1
∂z1=−z3sinz1
∂h1
∂z2= 0
∂h1
∂z3= cosz1
∂h1
∂z4= 0
∂h2
∂z1= z3cosz1
∂h2
∂z2= 0
∂h2
∂z3= sinz1
∂h2
∂z4= 0
, (2.38)
y,∂h1
∂u1= 0
∂h1
∂u2= 0
∂h2
∂u1= 0
∂h2
∂u2= 0
, (2.39)
Evaluando las matrices Jacobianas en(ze,ue) tenemos:
∂ f∂x
(ze,ue) =
0 1 0 0ue2(m1r1+m2z3e)
m2(m1r21+m2z2
3e)0
−m2u1e
(m1r21+m2z2
3e)(m1r1+m2z3e)0
0 0 0 1
− u1e
m1r1+m2z3e2z3e 0 0
, (2.40)
∂ f∂u
(ze,ue) =
0 11
m1r21+m2z2
3e
0
0 0
01
m2
, (2.41)
∂h∂x
(ze,ue) =
−z3ue2
gm20
u1e
g(m1r1+m2z3e)0
z3eu1e
g(m1r1+m2z3e)0
ue2
gm20
, (2.42)
y∂h∂u
(ze,ue) =
[0 00 0
]
. (2.43)
Modelo lineal en la forma espacio de estadosUsando las matrices Jacobianas arriba mencionadas y definiedo:
∂ f∂z
(ze,ue) = A y∂ f∂u
(ze,ue) = B
∂h∂z
(ze,ue) =C y∂h∂u
(ze,ue) = D
Luego las matrices correspondientes para la representacion espacio de estados lineal alrededor del punto de operacion(ze,ue) son:

2.4 Ejemplo: manipulador robotico - incluyendo la dinamica del cuerpo rıgido 27
A=
0 1 0 0ue2(m1r1+m2z3e)
m2(m1r21+m2z2
3e)0
−m2u1e
(m1r21+m2z2
3e)(m1r1+m2z3e)0
0 0 0 1
− u1e
m1r1+m2z3e2z3e 0 0
, B=
0 11
m1r21+m2z2
3e
0
0 0
01
m2
, (2.44)
y:
C=
−z3ue2
gm20
u1e
g(m1r1+m2z3e)0
z3eu1e
g(m1r1+m2z3e)0
ue2
gm20
, D =
[0 00 0
]
, (2.45)
La representacion espacio de estados lineal queda de la siguiente forma:
dzdt
=
0 1 0 0ue2(m1r1+m2z3e)
m2(m1r21 +m2z2
3e)0
−m2u1e
(m1r21 +m2z2
3e)(m1r1+m2z3e)0
0 0 0 1
− u1e
m1r1+m2z3e2z3e 0 0
z+
0 11
m1r21 +m2z2
3e
0
0 0
01
m2
u (2.46)
v=
−z3ue2
gm20
u1e
g(m1r1+m2z3e)0
z3eu1e
g(m1r1+m2z3e)0
ue2
gm20
z+
[0 00 0
]
u. (2.47)
2.3.4. Ideas adicionales acerca del modelo
Si asumimos quer = cte= r1 y que el objetivo es mantenerθ = π/2, entonces el problema del manipuladorrobotico se puede interpretar como un pendulo invertido con masam1+m2. ¿Que pasa cuandoθ = π/2 y r = cte> r1,que sistema tenemos?.
Otra simplificacion del modelo se puede dar cuando se consideraθ = 0 y r variable, en ese caso podemos hablar detraslacion de la masa de carga en la direccion horizontal.
2.4. Ejemplo: manipulador robotico - incluyendo la dinamica del cuerpo rıgido
(El siguiente problema ha sido adaptado de Snyder, W.E.,Industrial Robots: Computer interfacing and control) Enla Fig. 2.7 se muestra el manipulador robotico θ − r. Un representacion esquematica del robot es presentada en la Fig.2.8. La masamo = 10kg representa la masa del cilindro exterior y se ubica en elcentro de masa del cilindro exterior,Iorepresenta el momento de inercia del cilindro exterior con respecto a su centro de masa. La constantero
2 = 1m designala distancia fija entre el centro de masa del cilindro exterior y el centro de rotacion. La masa de la carga es representadapor ml = 3kg y se asume que esta localizada al final de un piston de un brazo telescopico cuya distancia radialr esmedia a partir del centro de rotacion. El angulo de rotacion del brazo manipulador esθ . El cilindro interno del brazotelescopico tiene masami = 2kg y momento de inercia igual aIi . Asuma que las entradas al sistema son el torqueTθaplicado en el centro de rotacion en la direccion delanguloθ y la fuerza traslacional (radial)Fr aplicada en la direccionr. Usarg= 9,8m/sec2 como aceleracion de la gravedad.
Construiremos las ecuaciones de movimiento del sistema en base a las ecuaciones de Lagrange y luego las repre-sentaremos en la forma espacio de estados.

28 2 Linealizacion
Figura 2.7 Manipulador robotico θ − r
Io , mo , ro
Ii , mi , ro
ml
Figura 2.8 Representacion esquematica manipuladorθ − r
2.4.1. Ecuaciones de movimiento usando Lagrange
Energıa cineticaPrimero encontramos la energia cinetica total del sistema. La energia cinetica traslacional es obtenidadefiniendo las posiciones de los centros de masa de los cilindros externo e interno con masasmo y mi , y la posicion dela masa de cargaml :
xo =12rocosθ ,
yo =12rosinθ .
xi = (r− 12ro)cosθ ,
yi = (r− 12ro)sinθ .
xl = rcosθ ,yl = rsinθ .
Notese quero es una constante, mientras quer no lo es. Diferenciandox ey con respecto al tiempo se obtiene:
xo =−ro12θsinθ ,
yo = ro12 θcosθ .
xi =12 rcosθ − 1
2r θsinθ + 12roθsinθ ,
yi =12 rsinθ + 1
2r θcosθ − 12roθcosθ .
xl = rcosθ − r θsinθ ,yl = rsinθ + r θcosθ .
La magnitud del cuadrado del vector velocidad de los centrosde masa de los cilindros exterior e interior, y de lamasa de la carga es:
v2o = xo
2+ yo2 =
r2o
4θ 2sin2θ +
r2o
4θ 2cos2θ = r2
o14
θ 2.
v2i = x2
i + y2i =
14(rcosθ +(ro− r)θsinθ)2+
14(rsinθ − (ro− r)θcosθ)2 =
14
r2+14(ro− r)2θ 2.
v2l = xl
2+ yl2 = (rcosθ − r θsinθ)2+(rsinθ + r θcosθ)2 = r2+ r2θ 2.
Entonces, la energia cinetica traslacional de los cilindros y masa de carga respectivamente es:
Tto =12
mov2o =
12
14
mo(r2oθ 2).
Tti =12
miv2i =
12
14
mi(r2+(ro− r)2θ 2).

2.4 Ejemplo: manipulador robotico - incluyendo la dinamica del cuerpo rıgido 29
Ttl =12
ml v2l =
12
ml (r2+ r2θ 2).
Considerando que los cilindros son cuerpos rıgidos, debemos adicionar su energıa cinetica rotacional a la energiacinetica total del sistema. Este no es el caso para la masa de carga, que es considerada como una masa concentrada(partıcula). La energia cinetica rotacional de los cilindros se obtiene usando:
Tro =12
Ioω2
Tri =12
Iiω2
Asumiendo que el cilindro interno es una varilla, su momentode inercia con respecto al centro de gravedad esIi =112mir2. Para el caso del cilindro externo hueco se puede considerarqueIo = 1
12mo(3t2+ r2o), dondet depende de los
radios internos y externos del cilindro hueco. Sabiendo queω = θ , se obtiene:
Tro =12
112
mo(3t2+ r2o)θ 2
Tri =12
112
mir2oθ 2
Sumando las energıas cineticas resulta:T = Tt +Tr
T =12
(14
mo(r2oθ 2)+
14
mi(r2+(ro− r)2θ 2)+ml (r
2+ r2θ 2)+112
mir2oθ 2+
112
mo(3t2+ r2o)θ 2
)
T =12
(
mo(13
r2oθ 2+
14
t2)+mi(14
r2+13
r2θ 2+14
r2oθ 2− 1
2ror θ 2)+ml (r
2+ r2θ 2).
)
Energıa potencialAhora encontraremos la energıa potencial del sistema. La energıa potencial de los centros de masade los cilindros (mo y mi) y la masa de cargaml :
Vo =12
mogrosinθ .
Vi =12
mig(r−12
ro)sinθ .
Vl = ml grsinθ .
Luego la energia potencial total es:
V =
(12(moro+mi(r−
12
ro))+ml
)
gsinθ .
Ecuaciones de movimientoLa funcion Lagrangiana (o Lagrangiano) para el sistema es:
L = T−V = 12
(mo(
13r2
oθ 2+ 14t2)+mi(
14 r2+ 1
3r2θ 2+ 14r2
oθ 2− 12ror θ 2)+ml (r2+ r2θ 2)
)
−(
12(moro+mi(r− 1
2ro))+ml r)
gsinθ .
El manipulador posee dos grados de libertad (r y θ ). Luego, tenemos dos ecuaciones de movimiento para el sistema:
ddt
(∂L
∂ θ
)
− ∂L
∂θ= Tθ
ddt
(∂L
∂ r
)
− ∂L
∂ r= Fr
La primera ecuacion de movimiento resulta en:

30 2 Linealizacion
13mor2
oθ + 13mir2θ + 1
4mir2oθ − 1
2mirroθ − 12miror θ + 2
3mir r θ +ml r2θ +2ml r r θ+gcosθ
(12(moro+mi(r− 1
2ro))+ml r)= Tθ .
La segunda ecuacion de movimiento viene a ser:
14
mi r +ml r−13
mir θ 2+14
miroθ 2−ml r θ 2+(12
mi +ml )gsinθ = Fr .
2.4.2. Representacion espacio de estados
Definiendo las siguientes variables:
z1 = θ , z2 = θ , z3 = r, z4 = r,
se puede escribir:
ddt
z1
z2
z3
z4
︸ ︷︷ ︸
dzdt
=
z2
−23miz2z3z4−2ml z2z3z4+
12miroz2z4−gcosz1(
12moro+
12mi(z3− ro
2 )+ml z3)+u113mor2
o+13miz2
3+14mir2
o− 12miz3ro+ml z2
3z4
13miz2
2z3+ml z22z3− (1
2mi +ml )gsinz1+u2
ml +14mi
︸ ︷︷ ︸
f (z,u)
, (2.48)
dondeu1 = Tθ y u2 = Fr . Asumiendo que la salida esta dada por la posicion de la masa de carga,v1 = xl = rcosθ yv2 = yl = rsinθ se tiene:
[v1
v2
]
︸︷︷︸
v
=
[z3sinz1
z3cosz1
]
︸ ︷︷ ︸
h(z,u)
, (2.49)
Fuente: Capıtulos 1 del libroSystems and Controlde Stanislaw H. Zak (2002).Fuente: Capıtulos 2 y 3 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astrom
y Richard M. Murray.Fuente: Capıtulos 1 del libroSystems and Controlde Stanislaw H. Zak (2002).Fuente: Capıtulos 2 y 3 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astrom
y Richard M. Murray.

Capıtulo 3Sistemas Lineales
En esta parte del curso nos centraremos en el caso de sistemaslineales invariantes en el tiempo y analizaremos elefecto de las condiciones iniciales y las entradas en las salidas. Los conceptos centrales de matriz exponencial y laecuacion convolucion nos permitiran caracterizar completamente el sistema.
Durante las clases anteriores hemos visto varios ejemplos donde los sistemas son modelados usando ecuacionesdiferenciales lineales. En general, varios sistemas dinamicos pueden ser modelados de forma precisa usando ecuacionesdiferenciales lineales. Ası, sistemas mecanicos y circuitos electricos son ejemplos donde los modelos lineales puedenser usados efectivamente. En muchos casos, nosotros creamos sistemas con una respuesta de entrada/salida lineal.Por ejemplo, casi todos los sistemas modernos de procesamiento de senales, ya sean analogicos o digitales, usanrealimentacion para producir caracterısticas de entrada/salida lineales o casi-lineales. Para estos sistemas, a menudoesutil representar las caracterısticas de entrada/salida como lineales, ignorando los detalles internos requeridos paraobtener la respuesta lineal. Para otros sistemas, sin embargo, las no linealidades no pueden ser ignoradas, especialmentesi uno se importa en el comportamiento global del sistema. Sin embargo, si solo nos importa lo que pasa cerca del puntode equilibrio, es suficiente aproximar la dinamica no lineal por su linealizacion local.
3.1. Definiciones basicas
3.1.1. Linealidad
Considerando el sistema en la forma espacio de estados y su correspondiente ecuacion de salida:
dxdt
= f (x,u), y= h(x,u), (3.1)
dondex∈ Rn, x∈ R
p y y∈ Rq. Sean(xe,ue) 6= 0 las condiciones de operacion, y definiendo:
x= x−xe, u= u−ue, y= y−ye. (3.2)
podemos reescribir las ecuaciones de movimiento usando como punto de equilibrio del sistema al origen ˜x= 0 y u= 0.Luego tenemos:
ddt
x = f (xe+ x,ue+ u) = f (x, u),
y = h(xe+ x,ue+ u)−ye = h(x, u).(3.3)
En el nuevo conjunto de variables, el origen es un punto de equilibrio con salida cero. Una vez realizado el analisisen este nuevo conjunto de variables, las respuestas obtenidas seran trasladadas de vuelta a las coordinadas inicialesusandox= xe+ x, u= ue+ u y y= ye+ y.
Para el sistema (3.1), asumiendo, sin perdida de generalidad, que el origen es el punto de equilibrio de interes,escribiremos la saliday(t) correspondiente a la condicion inicialx(0) = xo y entradau(t) comoy(t;xo,u). Usando estanotacion, un sistema de entrada/salida es lineal si las siguientescondiciones son satisfechas:
31

32 3 Sistemas Lineales
i) y(t;αx1+βx2,0) = αy(t;x1,0)+βy(t;x2,0)ii) y(t;αxo,δu) = αy(t;xo,0)+δy(t;0,u)iii ) y(t;0,δu1+ γu2) = δy(t;0,u1)+ γy(t;0,u2).
(3.4)
Luego definimos que un sistema eslineal si las salidas son conjuntamente lineales en la respuesta a las condicionesiniciales (u= 0) y la respuesta forzada (x(0) = 0). La propiedadiii ) esta relacionada alprincipio de superposicion: larespuesta de un sistema lineal a la suma de dos entradasu1 y u2 es la suma de las salidasy1 y y2 correspondientes acada entrada.
La forma general del sistema lineal en la forma de espacio de estados, con correspondiente ecuacion de salida, es:
dxdt
= Ax+Bu, x(0) = xo
y =Cx+Du,(3.5)
dondeA∈Rn×n, B∈Rn×p, C∈Rq×n y D∈Rq×p. La ecuacion (3.5) es un sistema de ecuaciones diferenciales linealesde primer orden con entradau, estadox y saliday. Es facil mostrar que dos soluciones dadasx1(t) y x2(t) para estesistema de ecuaciones, satisfacen las condiciones de linealidad.
Definiendoxh(t) como la solucion con entrada cero (solucion homogenea) y la solucionxp(t) como la solucion concondiciones iniciales igual a cero (solucion particular). La Fig. 3.1 ilustra como dos soluciones individuales se puedensuperponer para formar la solucion completa.
0 20 40 60−2
0
2
Homogeneous
Input u
0 20 40 60−2
0
2
0 20 40 60−2
0
2Output y
0 20 40 60−2
0
2
Particular
0 20 40 60−2
0
2
0 20 40 60−2
0
2
0 20 40 60−2
0
2
Complete
Time t [sec]0 20 40 60
−2
0
2
Time t [sec]0 20 40 60
−2
0
2
Time t [sec]
State x1, x2
Figura 3.1 Superposicion de soluciones particulares y homogeneas.
Respuesta total = respuesta a entrada cero + respuesta a condiciones iniciales cero
3.1.2. Invariancia en el tiempo
Invariancia en el tiempo es un concepto importante que se usapara describir un sistema cuyas propiedades nocambian en el tiempo. Mas precisamente, para un sistema invariante en el tiempo, sila entradau(t) resulta eny(t), luegomoviendo el tiempo en el que se aplica la entrada por una constantea, u(t+a), la salida resulta eny(t+a). Los sistemasque son lineales e invariantes en el tiempo a menudo se denominan sistemas LTI (linear time invariant, por sus siglasen ingles) y poseen una propiedad interesante: su respuesta a una entrada arbitraria esta completamente caracterizadapor sus respuesta a entradas del tipo escalon o sus respuestas a impulsos cortos. Ver mas detalle a continuacion.

3.2 Respuesta a la condicion inicial 33
Descripcion entrada-salida, sistema LTI
Suponiendo que el sistema se encuentra inicialmente en el punto de equilibrio (respuesta a las condiciones inicialeses cero), la respuesta a una entrada se puede obtener al superponer las respuestas a una combinacion de entradas tipoescalon. Un ejemplo de este calculo esta dado en la Fig.??. La Fig.??(a) muestra una entradau(t) lineal por partes(suma de funciones escalon). SeaH(t) la respuesta a un escalon unitario aplicado en el tiempo 0. La respuesta al primerescalon es entoncesH(t − to)u(to), la respuesta al segundo escalon esH(t − t1)(u(t1)− u(to)), y ası sucesivamente.Luego, podemos encontrar la respuesta completa del sistemasiendo dada por:
y(t) = H(t− to)u(to)+H(t− t1)(u(t1)−u(to))+ ...= (H(t− to)−H(t− t1))u(to)+(H(t− t1)−H(t− t2))u(t1)+ ...
=∞
∑n=0
(H(t− tn)−H(t− tn+1))u(tn)
=∞
∑n=0
(H(t− tn)−H(t− tn+1))
tn+1− tnu(tn)(tn+1− tn),
(3.6)
como mostrado en la Fig.??(b). La respuesta a una senal contınua se obtiene tomando el lımite cuandotn+1− tn→ 0,que resulta en:
y(t) =∫ ∞
0H ′(t− τ)u(τ)dτ , (3.7)
dondeH ′ es la derivada de la respuesta al escalon, tambien llamadarespuesta impulsiva h. Luego, la respuesta deun sistema LTI a cualquier entrada puede ser calculada a partir de la respuesta al escalon. Notese que la salida solodepende de la entrada pues consideramos que el sistema esta en reposo al inicio,x(0) = 0).
Siendo el sistemacausal(sistema donde la salida depende de las entradas pasadas o actuales pero no de entradasfuturas), se tiene que la salida para todo sistema LTI causalen reposo al inicio esta descrita por:
y(t) =∫ t
0h(t− τ)u(τ)dτ =
∫ t
0h(τ)u(t− τ)dτ , (3.8)
La segunda igualdad puede ser facilmente verificada haciendo un cambio de variable (t− τ = σ ). La integracion en(3.8) es llamada unaintegracion convolucion.
0 2 4 6 80
0.2
0.4
0.6
0.8
1
Time (sec)
Input
(u)
u(t0)
u(t1)
u(t1)−u(t0)
0 5 10 15
−0.5
0
0.5
1
Time (sec)
Outp
ut
(y)
Complete
Steps
Figura 3.2 (a) Respuesta a entradas contınuas por partes y (b) salida resultante de la suma de entradas individuales.
3.2. Respuesta a la condicion inicial
La ecuacion (3.7) muestra que la salida de un sistema lineal se puede expresar como un integral sobre todas lasentradasu(t). En esta seccion derivaremos una formula mas general, que incluye las condiciones iniciales diferentesde cero.
En esta seccion calcularemos la solucion de un sistema de la forma:

34 3 Sistemas Lineales
dxdt
= Ax, x(0) = xo. (3.9)
Para la ecuacion diferencial escalar se tiene:
dxdt
= ax, x∈ R,a∈ R (3.10)
y la solucion esta dada por:x(t) = eatx(0). (3.11)
Generalizando para cuandoA se convierte en una matriz. Definimos elexponencial de matricescomo una serie infinita:
eX = I +X+12
X2+13!
X3+ ...=∞
∑k=0
1k!
Xk, (3.12)
dondeX ∈ Rn×n es una matriz cuadrada yI es la matriz identidadn×n.
ReemplazandoX en (3.9) porAt, dondet ∈ R, tenemos que:
eAt = I +At+12
A2t2+13!
A3t3+ ...=∞
∑k=0
1k!
Aktk, (3.13)
luego diferenciando la expresion en (3.13) con respecto al tiempo resulta en:
ddt
eAt = A+A2t +12
A3t2+ ...= A∞
∑k=0
1k!
Aktk = AeAt. (3.14)
Multiplicando porx(0) por la derecha, encontramos quex(t) = eAtx(0) es la solucion a la ecuacion diferencial (9.8)con condiciones inicialesx(0). La matrizΦ(t) = eAt es denominadamatriz de transicion.
Tomando la transformada de Laplace en (3.14), sabiendo queL [dh(t)/dt] = sL [h(t)]−h(0), tenemos:
sL (eAt)−e0 = AL (eAt)
(sI−A)L (eAt) = I .
Entonces, siA no tiene autovalores en el eje imaginario, obtenemos:
L (eAt) = (sI−A)−1. (3.15)
3.2.1. Ejemplo: Integrador doble
Un sistema lineal muy simple que puede ser usado para enteubnder conceptos basicos es la ecuacion diferencial desegunda orden dada por:
q= u, y= q.
El sistema es llamado deintegrador dobleporque su entradau es integrada dos veces para determinar la saliday. En laforma espacio de estados, escribimosx=
[q q]T
y:
dxdt
=
[0 10 0
]
x+
[01
]
u.
La matriz dinamica de un integrador doble es:
A=
[0 10 0
]
,
y por calculo directo encontramos queA2 = 0 y entonces:

3.3 Respuesta entrada/salida 35
Φ(t) = eAt =
[1 t0 1
]
.
Entonces, la solucion homogenea (u= 0) para un integrador doble es dada por:
x(t) =
[1 t0 1
][x1(0)x2(0)
]
=
[x1(0)+ tx2(0)
x2(0)
]
.
3.2.2. Ejemplo: Oscilador sin amortiguamiento
Un modelo simple de oscilador, tal como el sistema masa-resorte sin amortiguamiento es:
q+ω2oq= u.
Poniendo el sistema en la forma de espacio de estados, la matriz dinamica del sistema puede ser escrita como:
A=
[0 ωo
−ωo 0
]
y eAt =
[cosωot sinωot−sinωot cosωot
]
.
Esta expresion paraΦ(t) = eAt se puede verificar por diferenciacion:
ddt
eAt =
[−ωosinωot ωocosωot−ωocosωot −ωosinωot
]
,
=
[0 ωo
−ωo 0
][cosωot sinωot−sinωot cosωot
]
= AeAt.
Luego la solucion esta dada por:
x(t) = eAtx(0) =
[cosωot sinωot−sinωot cosωot
][x1(0)x2(0)
]
.
Si el sistema tiene amortiguamiento:q+2ζ ωoq+ω2
oq= u,
la solucion es mas complicada, pero se puede mostrar que la matriz exponencial es de la forma:
e−ωoζ t
ζeiωdt −ζe−iωdt
2√
ζ 2−1+
eiωdt +e−iωdt
2eiωdt −e−iωdt
2√
ζ 2−1e−iωdt −eiωdt
2√
ζ 2−1
ζe−iωdt −ζeiωdt
2√
ζ 2−1+
eiωdt +e−iωdt
2
,
dondeωd = ωo
√
ζ 2−1. Notese queωd y√
ζ 2−1 pueden ser real o complejo, pero la combinacion de terminossiempre proveera un valor real para los elementos del exponencial de la matriz.
3.3. Respuesta entrada/salida
En esta seccion derivaremos la ecuacion convolucion, que incluye entradas y salidas.

36 3 Sistemas Lineales
3.3.1. Ecuacion de convolucion
Volviendo al sistema general de entrada/salida en la ecuacion (3.5). Usando la matriz exponencial , la solucion de laecuacion (3.5) se puede escribir como:
Teorema 1La solucion de la ecuacion diferencial lineal:
dxdt
= Ax+Bu, x(0) = xo
y =Cx+Du.(3.16)
esta dada por:
x(t) = eAtx(0)+∫ t
0eA(t−τ)Bu(τ)dτ (3.17)
⋄Demostracion: Diferenciando ambos lados en (3.17) y usando la propiedad (3.13) de la matriz exponencial. Luego,
por sustitucion directa1, tenemos:
dxdt
= AeAtx(0)+∫ t
0AeA(t−τ)Bu(τ)dτ +Bu(t) = Ax+Bu, (3.18)
que prueba el resultado. ⋄De las ecuaciones en (3.16) y (3.17) la relacion entrada/salida para un sistema lineal esta dado por:
y(t) =CeAtx(0)+∫ t
0CeA(t−τ)Bu(τ)dτ +Du(t). (3.19)
La ecuacion (3.19) se denominaecuacion de convolucion y representa la forma general de solucion de un sistemade ecuaciones diferenciales lineales acopladas. Esta ecuacion y la ecuacion (14) han sido directamente calculadas en eldominio del tiempo. Tambien podemos calcular las soluciones en el dominio de la frecuencia usando la transformadade Laplace. Aplicando la transformada de Laplace a la ecuacion (3.18) resulta:
X(s) = (sI−A)−1[x(0)+BU(s)]
Y(s) =C(sI−A)−1x(0)+ [C(sI−A)−1B+D]U(s)(3.20)
Respuesta impulsiva
La respuesta impulsiva de un sistema vendrıa a ser la salida correspondiente a tener un impulso como entrada en(3.19):
y(t) =∫ t
0CeA(t−τ)Bδ (τ)dτ +Dδ (t) =CeAtB+Dδ (t), (3.21)
donde la segunda igualdad sigue del hecho queδ (t) es cero en cualquier lugar excepto el origen y su integral esidenticamente igual a 1. Notese que existe una limitacion en el calculo de la respuesta impulsiva cuandoD 6= 0 ya queDδ (t) se hace infinito ent = 0. En la practica, se ignora la matrizD y la respuesta impulsiva viene dada por:
y(t) = h(t) =∫ t
0CeA(t−τ)Bδ (τ)dτ =CeAtB. (3.22)
Escribiendo la ecuacion de convolucion en terminos de la respuesta a las condiciones iniciales y la integral convolucion(3.8) de la respuesta impulsivah(t) y la senal de entradau(t), se tiene:
y(t) =CeAtx(0)+∫ t
0h(t− τ)u(τ)dτ , (3.23)
1 ∂∂ t
∫ tto f (t,τ)dτ = f (t,τ)|τ=t +
∫ tto
∂∂ t f (t,τ)dτ.
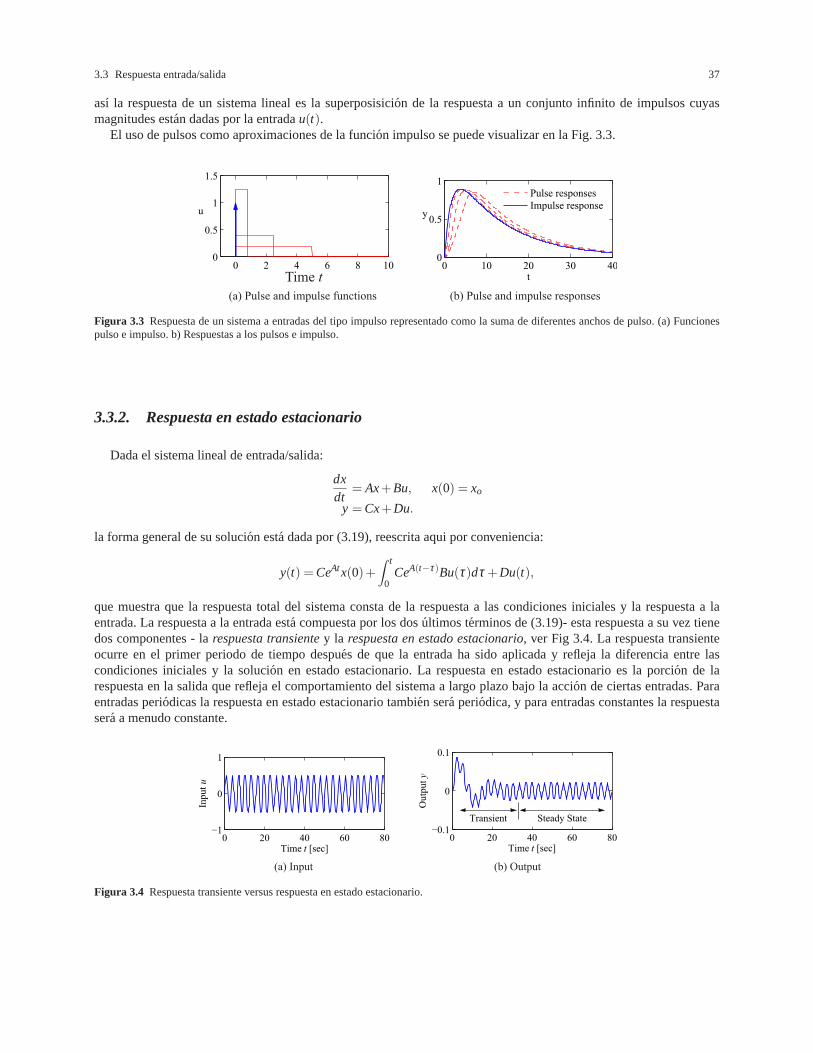
3.3 Respuesta entrada/salida 37
ası la respuesta de un sistema lineal es la superposisicion de la respuesta a un conjunto infinito de impulsos cuyasmagnitudes estan dadas por la entradau(t).
El uso de pulsos como aproximaciones de la funcion impulso se puede visualizar en la Fig. 3.3.
0 2 4 6 8 100
0.5
1
1.5
u
Time t
(a) Pulse and impulse functions
0 10 20 30 400
0.5
1
t
y
Pulse responses
Impulse response
(b) Pulse and impulse responses
Figura 3.3 Respuesta de un sistema a entradas del tipo impulso representado como la suma de diferentes anchos de pulso. (a) Funcionespulso e impulso. b) Respuestas a los pulsos e impulso.
3.3.2. Respuesta en estado estacionario
Dada el sistema lineal de entrada/salida:
dxdt
= Ax+Bu, x(0) = xo
y =Cx+Du.
la forma general de su solucion esta dada por (3.19), reescrita aqui por conveniencia:
y(t) =CeAtx(0)+∫ t
0CeA(t−τ)Bu(τ)dτ +Du(t),
que muestra que la respuesta total del sistema consta de la respuesta a las condiciones iniciales y la respuesta a laentrada. La respuesta a la entrada esta compuesta por los dosultimos terminos de (3.19)- esta respuesta a su vez tienedos componentes - larespuesta transientey la respuesta en estado estacionario, ver Fig 3.4. La respuesta transienteocurre en el primer periodo de tiempo despues de que la entrada ha sido aplicada y refleja la diferencia entre lascondiciones iniciales y la solucion en estado estacionario. La respuesta en estado estacionario es la porcion de larespuesta en la salida que refleja el comportamiento del sistema a largo plazo bajo la accion de ciertas entradas. Paraentradas periodicas la respuesta en estado estacionario tambien sera periodica, y para entradas constantes la respuestasera a menudo constante.
0 20 40 60 80−1
0
1
Time t [sec]
Inputu
(a) Input
0 20 40 60 80−0.1
0
0.1
Transient Steady State
Time t [sec]
Outputy
(b) Output
Figura 3.4 Respuesta transiente versus respuesta en estado estacionario.

38 3 Sistemas Lineales
Respuesta al escalon unitario
La funcion escalon unitario esta definida como:
u= S(t) =
0 t = 0,1 t > 0,
y representa un cambio abrupto de un valor a otro valor.La respuesta a un escalon unitario del sistema (3.5) esta definido como la saliday(t) comenzando de las condiciones
iniciales cero (o el punto de equilibrio apropiado) y dada una entrada del tipo escalon. Calculando la respuesta a unescalon unitario de un sistema lineal usando la ecuacion convolucion, parax(0) = 0, tenemos:
y(t) =∫ t
0CeA(t−τ)Bu(τ)dτ +Du(t) =C
∫ t
0eA(t−τ)Bdτ +D
=C∫ t
0eAσ Bdσ +D = C(A−1eAσ B)
∣∣σ=tσ=0+D
=CA−1eAtB−CA−1B+D.
(3.24)
Luego, reescribiendo la solucion tenemos:
y(t) =CA−1eAtB︸ ︷︷ ︸
transiente
+ D−CA−1B︸ ︷︷ ︸
estado estacionario
. (3.25)
El primer termino es la respuesta transiente que decae a cero a medida que t→ ∞. El segundo termino es la respuestaal estado estacionario y representa el valor de la salida para despues de transcurrido un tiempo grande.
Respuesta a una entrada senoidal. Respuesta en la frecuencia
Una senal de entrada comun es del tipo senoidal (o combinacion de senos). La respuesta en la frecuencia de unsistema de entrada/salida mide la forma en la que el sistema responde a una excitacion senoidal. Dado que la solucionasociada a una excitacion senoidal es a su vez un senoide a la misma frecuencia, luegonos limitamos a comparar lamagnitud y la fase de la salida senoidal.
Evaluando al ecuacion convolucion (3.19) parau= cosωt. En particular notando que:
cosωt =12(eiωt +e−iωt).
Dado que el sistema es lineal, es suficiente calcular la respuesta del sistema a una entrada compleja de la formau(t) = est y luego podemos reconstruir la salida a un senoide mediante el promedio de las respuestas correspondienteas= iωt y s=−iωt.
Aplicando la ecuacion convolucion a la entradau= est tenemos:
y(t) =CeAtx(0)+∫ t
0CeA(t−τ)Besτdτ +Dest
=CeAtx(0)+CeAt∫ t
0Ce(sI−A)τBdτ +Dest
(3.26)
Asumiendo que ninguno de los autovectores deA es igual as= ±iω, luego la matrizsI−A es invertible y podemosescribir:
y(t) =CeAtx(0)+ CeAt(
(sI−A)−1e(sI−A)τB)∣∣∣
t
0+Dest
=CeAtx(0)+CeAt(sI−A)−1(
e(sI−A)t − I)
B+Dest
=CeAtx(0)+C(sI−A)−1estB−CeAt(sI−A)−1B+Dest,
(3.27)
y obtenemos:

3.4 Polos, ceros y ganancia 39
y(t) =CeAt (x(0)− (sI−A)−1B)
︸ ︷︷ ︸
transiente
+(C(sI−A)−1B+D
)est
︸ ︷︷ ︸
estado estacionario
, (3.28)
Nuevamente tenemos una solucion que consiste de un componente transiente y uno estado estacionario. El componentetransiente decae a cero si el sistema es asintoticamente estable y el componente estado estacionario es proporcional ala entrada (compleja)u= est.
La respuesta en estado estacionario se puede reescribir como:
yss(t) = Meiθ est = Mest+iθ ,
donde:Meiθ =C(sI−A)−1B+D, (3.29)
con M y θ representando la magnitud y la fase de un numero complejoC(sI−A)−1B+D. El numero complejoC(sI−A)−1B+D se denominafuncion de transferencia. Cuandons= iω, decimos queM es la ganancia yθ es lafase del sistema para cierta frecuencia de excitacion ω. Usando linealidad y combinando las soluciones des=+iω ys=−iω, podemos mostrar que si tenemos una entradau= Ausin(ωt +ψ) y una saliday= Aysin(ωt +ϕ), entonces:
ganancia(ω) =Ay
Au= M, fase(ω) = ϕ−ψ = θ .
La solucion en estado estacionario para un senoideu= cosωt esta dada por:
yss(t) = Mcos(ωt +θ),
como presentado en la Fig. 3.5. Si la faseθ es positiva se dice la salida esta adelantada a la entrada, de otra formadecimos que la salida esta atrasada a la entrada.
0 5 10 15 20−2
−1
0
1
2
Time [sec]
Input, output
∆T
T
Input Output
Au
Ay
(a) Input/output response
10−3
10−1
101
Gain
0.5 5−270
−180
−90
0
Phase [deg]
Frequency [rad/s]
(b) Frequency response
Figura 3.5 Respuesta de un sistema lineal a un senoide. a) Respuesta entrada/salida. b) Respuesta en frecuencia.
Una propiedad de la respuesta en frecuencia es que la ganancia del sistema cuandoω = 0 se denominaganancia enla frecuencia ceroy corresponde a la relacion entre una entrada constante y la salida estacionaria:
Mo =−CA−1B+D.
En Ingenierıa Electrica la ganancia de frecuencia cero es denominadaDC gain.
3.4. Polos, ceros y ganancia
La funcion de transferenciaG(s) = C(sI−A)−1B+D tiene interpretaciones muyutiles y sus caracterısticas son amenudo asociadas a propiedades importantes del sistema. Tres de las caracterısticas mas importantes son la gananciay la ubicacion de polos y ceros.

40 3 Sistemas Lineales
La ganancia en la frecuencia cero(o ganancia DC) esta dada por la magnitud de la funcion de transferencia ens= 0.Representa la relacion del estado estacionario a la salida del sistema con respecto a una entrada del tipo escalon (quepuede ser representado poru= est cons= 0). Para una representacion de espacio de estados, calculamos la gananciaen la frecuencia cero usando la siguiente ecuacion:
G(0) =−CA−1B+D. (3.30)
Para un sistema escrito como una ecuacion diferencial lineal:
dnydtn
+a1dn−1ydtn−1 + ...+any= bo
dmudtm
+b1dm−1udtm−1 + ...+bmu,
si asumimos que la entrada y la salida del sistema (en estado estacionario) son constantesyo y uo, luego encontramosqueanyo = bmuo. Luego la ganancia en la frecuencia cero es:
G(0) =yo
uo=
bm
an. (3.31)
Considerando el sistema lineal con la siguiente funcion de transferencia racional:
G(s) =b(s)a(s)
. (3.32)
las raices del polinomioa(s) son llamadospolosdel sistema, y las raices del polinomiob(s) son llamados loscerosdelsistema. Si los polos del sistema pertenecen al semiplano complejo izquierdo abierto (Co
−) se dice que la funcion detransferencia esestable. Si los ceros del sistema pertenecen al semiplano complejo izquierdo abierto (Co
−) se dice queel sistema es defase mınima, en caso contrario los ceros son defase no mınima2.
Para un sistema espacio de estados con funcion de transferenciaG(s) =C(sI−A)−1B+D, los polos de la funcionde transferencia son los autovalores de la matriz dinamicaA (sistema conrealizacion mınima). Una forma de ver estoes notando que el valor deG(s) tiende a infinito cuandoses un autovalor de la matriz dinamica del sistema puesto ques es precisamente el conjunto de puntos donde el polinomio caracterısticoλ (s) = det(sI−A) = 0 (y luego(sI−A) noes invertible). Se puede destacar que los polos del sistema en la forma de espacio de estados solo depende de la matrizA, que representa la dinamica intrınseca del sistema. Decimos que una funcion de transferencia es establesi todos suspolos tienen parte real negativa.
Para encontrar los ceros de un sistema en la forma de espacio de estados, observamos que los ceros son numeroscomplejoss tal que la entradau(t) = uoest resulta en salida igual a cero. Insertando una respuesta puramente exponen-cial x(t) = xoest y y(t) = 0 en:
x= Ax+Bu, y=Cx+Du,
resulta:sestxo = Axoest+Buoest, 0=Cestxo+Destuo
que puede ser escrito como:[−sI+A B
C D
][xo
uo
]
= 0. (3.33)
Esta ecuacion tiene una solucion conxo 6= 0, uo 6= 0 solo si la matriz a la izquierda no tiene rango completo. Loscerosdel sistema (llamados tambienceros de transmision, en caso de una realizacion mınima) son entonces aquellos valoresdes tal que la matriz.
[−sI+A B
C D
]
, (3.34)
pierde rango o det
([−sI+A B
C D
])
=0.
Siendo que los ceros dependen deA, B, C y D, ellos dependen de como las entradas y salidas son acopladascon losestados. Notese que en particular si la matrizB tiene rango completo, luego la matriz en (3.34) tienen filas linealmente
2 Por ejemplo, el sistemag(s) = −s+as+a con cero en el semiplano derecho ens= a tiene una ganancia constante de 1, pero su fase es
−2arctan(ω/a) rad y no 0 rad como serıa para el sistema de fase mınimag(s) = 1 con ganancia similar.

3.5 Otros 41
independientes para todos los valores des. Similarmente hayn columnas linealmente independientes si la matrizCtiene rango completo. Eso significa que los sistemas dondeB y C son de rango completo no tienen ceros. En particularesto significa que un sistema no tiene ceros si es totalmente posible actuar enel (cada estado puede ser controladoindependientemente) o si todos los estados son medidos. Para cuando consideramos sistemas sin igual numero deentradas y salidas, el calculo de los ceros usando (3.34) se hace inadecuado. Para este caso se trabaja directamente conla matriz de funciones de transferencia, como descrito a continuacion.
POR COMPLETAR
3.5. Otros
Ancho de bandaEl concepto de ancho de banda es importante en el entendimiento de los beneficios y desventajas alaplicar control por realimentacion. El ancho de banda esta relacionado a la velocidad de respuesta. En general, un anchode banda grande corresponde a un tiempo de levantamiento pequeno, esto debido a que las senales de alta frecuenciason pasadas mas facilmente hacia las salidas. Un ancho de banda grande tambien indica que el sistema es mas sensibleal ruido y a las perturbaciones parametricas. Por otro lado, si el ancho de banda es pequeno, el tiempo de respuestasera por lo general grande, y el sistema usualmente sera mas robusto.
POR COMPLETAR
Fuente: Capıtulos 5 y 8 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astromy Richard M. Murray (2008).
Fuente: Capıtulo 4 del libroMultivariable Feedback Controlde S. Skogestad y I. Postlethwaite (2006).


Capıtulo 4Formas canonicas
En esta parte discutiremos tres tipos de modelos de sistemasdinamicos lineales que presentan formas especiales desus correspondientes (A, B y C). Estas formas se obtienen mediante un cambio de variable, el cual finalmente revelaciertas propiedades estructurales del modelo. Estas formas seran de utilidad en las siguientes secciones cuando seconstruyan algoritmos para la ubicacion de polos. Los algoritmos de ubicacion de polos seran usados para disenarcontroladores por realimentacion de estados, asi como estimadores de estado.
4.1. Definiciones
4.1.1. Invariancia de coordenadas
La forma general del sistema lineal en su representacion espacio de estados, con correspondiente ecuacion de salida,es:
dxdt
= Ax+Bu, y=Cx+Du, (4.1)
dondeA∈Rn×n, B∈Rn×m, C∈Rp×n y D∈Rp×m. Los componentes del vector de entradau y el vector de saliday sondados por las entradas y salidas de un modelo, mientras que las variables de estado dependen del sistema coordenadousado para representar los estados. La eleccion de coordenadas afecta los valores de las matricesA, B y C (D noesta afecta dado que mapea entradas a salidas). A continuacion investigaremos las consecuencias de cambiar el sistemacoordenado.
Si elegimos el conjunto de coordenadasz= Tx, dondeT es una matriz invertible. De (4.1) se tiene:
dzdt
= Tdxdt
= T(Ax+Bu) = TAx+TBu= TAT−1z+TBu= Az+ Bu,
y=Cx+Du=CT−1z+Du= Cz+Du.(4.2)
El sistema transformado tiene la misma forma que (4.1) pero con matricesA, B y C diferentes:
A= TAT−1, B= TB, C=CT−1 (4.3)
Existen sistemas de coordenadas que permiten visualizar una propiedad particular del sistema, luego las transfor-macions de coordenadas se pueden usar para ganar nuevo entendimiento de la dinamica del sistema.
Es posible comparar las soluciones del sistema en las coordenadas transformadas y en las coordenadas originalesusando la siguiente propiedad del mapeamiento exponencial:
eTST−1= TeST−1. (4.4)
Esta propiedad se puede verificar usando la definicion de exponencial de matrices. Ası se puede mostrar que:
43

44 4 Formas canonicas
m m
k k
u(t) = sin tωk
c c
q1 q2
Figura 4.1 Sistema masa resorte acoplado.
x(t) = T−1z= T−1eAtTx(0)+T−1∫ t
0eA(t−τ)Bu(τ)dτ . (4.5)
El transformarA a A es factible, siendo que el exponencial de matrice conA puede ser mas facil de calcular.
Ejemplo: Sistema masa-resorte acoplado
Considere el sistema mostrado en la Fig.??. La entrada al sistema es del tipo senoidal y es aplicada en elresorteque se ubica en el extremo derecho, y la salida es la posicion de cada masa,q1 y q2. Las ecuaciones de movimientoestan dadas por:
m1q1 =−2kq1−cq1+kq2, m2q2 = kq1−cq2−2kq2+Ku
En la forma espacio de estados, definiendo el estadox= (q1,q2, q1, q2), se puede escribir la ecuacion como:
dxdt
=
0 0 1 00 0 0 1−2k
mkm − c
m 0km −2k
m 0 − cm
x+
000km
u.
Este es un sistema acoplado de 4 ecuaciones diferenciales y es bastante complicado resolverlo en la forma analıtica.Usando la transformacion z= Tx pondremos al sistema en una forma mas simple. Seaz1 = 1
2(q1+ q2), z2 = z1,z3 =
12(q1−q2) y z4 = z3, tal que:
z= Tx=12
1 1 0 00 0 1 11 −1 0 00 0 1−1
x.
Y en el nuevo sistema coordenado, la dinamica es:
dzdt
=
0 1 0 0− k
m − cm 0 0
0 0 0 10 0 −3k
m − cm
z+
0k
2m0− k
2m
u.
Notese que la matriz resultante es diagonal por bloques y, como consecuencia, desacoplada. Luego las solucionespueden ser calculadas mediante solucion de dos sistemas de segunda orden representados por los estados(z1,z2) y(z3,z4). De hecho, la forma de cada grupo de ecuaciones es identica al de un sistema masa-resorte individual.
Una vez resueltos los grupos de ecuaciones, se puede recuperar la dinamica del sistema en las coordenadas originalesmediante inversion de la transformacion de estados y escribiendox= T−1z.

4.1 Definiciones 45
4.1.2. Autovalores/autovectores de una matriz y modos
Los autovalores y autovectores de un sistema proveen una descripcion del tipo de comportamiento que exhibe unsistema. Para sistemas oscilatorios, el terminomodose usa a menudo para definir ciertas configuraciones de vibracionque pueden ocurrir, ver Figs. 4.2 y 4.3.
(a) Mode 1
Figura 4.2 Sistema de masa conectadas por un resorte. Las masas se mueven hacia la derecha sincronizadas.
(b) Mode 2
Figura 4.3 Sistema de masa conectadas por un resorte. Las masas se mueven en direcciones separadas.
La respuesta a las condiciones iniciales de un sistema lineal se puede escribir en terminos del exponencial de unamatriz, la denominada matriz de estadosA. Luego, las propiedades de la matrizA determinan el comportamiento delsistema. SiA∈ R
n×n, asumamos que existenn vectores linealmente independientes (autovectores)vi y n escalaresλi
(autovalores) que satisfacen:Avi = λivi .
Escribiendo los vectoresvi como una matriz:
M ≡[
v1 v2 ... vn],
y definiendo la matrizΛ de acuerdo a:
Λ ≡
λ1 0 ... ... 00 λ2 0 ... 0
...0 ... 0 λn−1 00 ... ... 0 λn
,
tenemos que:AM = MΛ .
Luego se tiene que:I = MM−1
A = MΛM−1
A2 = MΛM−1MΛM−1
= MΛ2M−1
......
An = MΛnM−1
Si consideramos el exponencial de matriceseAt, asumiendo queA tienen vectores independientes:

46 4 Formas canonicas
eAt = I +At+A2t2
2+ ...+
Antn
n!+ ...
= MM−1+MΛ tM−1+MΛ2t2M−1
2!+ ...
= MeΛ tM−1
= M
eλ1t 0 ... ... 00 eλ2t 0 ... 0
...0 ... 0 eλn−1t 00 ... ... 0 eλnt
M−1
Suponiendo primero quev y λ son autovector y autovalor de valor real. Luego, observamos que la solucion de laecuacion diferencial parax(0) = v, de la definicion de exponencial de matrices arriba:
eAtv= MeΛ tM−1v= eλ tv.
Entonces, el autovalor describe como la solucion varıa en el tiempo, esta solucion a menudo se denominamodo. Elautovector define la forma de la solucion y a menudo se denominaforma del mododel sistema (ver Fig. 4.4). Elautovalor a menudo se denomina comofrecuencia modal.
0 2 4 6 8 100
0.5
1
1.5
u
Time t
(a) Pulse and impulse functions
0 10 20 30 400
0.5
1
t
y
Pulse responses
Impulse response
(b) Pulse and impulse responses
Figura 4.4 La nocion de modos para un sistema de segundo orden con autovalores reales.La figura en la izquierda muestra el plano defase y las de la derecha las respuestas en el tiempo. Ambas figuras muestran los modos correspondientes a soluciones que comienzan en losautovectores.
El caso de los autovalores complejoses mas complicado. SiendoA una matriz con elementos reales, los autovaloresy autovectores son complejos conjugadosλ = σ ± iω y v= u± iw, que implica que:
u=v+v∗
2, ,w=
v−v∗
2i.
Usando el exponencial de matrices tenemos que:
eAtv= eλ t(u+ iw) = eσt ((ucosωt−ω sinωt)+ i(usinωt +ω cosωt)) ,
luego sigue que:
eAtu=12(eAtv+eAtv∗) = ueσt cosωt−ωeσt sinωt,
eAtw=12(eAtv−eAtv∗) = ueσt sinωt +ωeσt cosωt.
Nuevamente llamamos a la solucion correspondiente aλ de modo del sistema, yv es la forma del modo.Algunas matrices con autovalores iguales no pueden ser transformadas a una forma diagonal. Ellos, entonces, pueden
ser transformados a una forma relacionada, denominadaforma de Jordan. En este caso, la matriz de estados posee losautovalores en la diagonal. Cuando hay autovalores iguales, pueden haber 1’s apareciendo en la superdiagonal, indi-cando el acoplamiento entre estados. Especıficamente decimos que una matriz esta en la forma de Jordan cuando:

4.1 Definiciones 47
J1 0 .. 0 00 J2 0 0 0...
......
0 0 Jk−1 00 0 ... 0 Jk
, dondeJi =
λi 1 .. 0 00 λi 1 0 0...
......
0 0 λi 10 0 ... 0 λ1
, (4.6)
dondeJi es un bloque de Jordan, yλi para ese bloque corresponde al autovalor deJ. Un bloque de Jordan puede serrepresentado por un sistema que consiste en un integrador con realimentacion λ , ver Fig. 4.5.
∫
λ
x1
6
∫
λ
x1 ∫
λ
x2
Figura 4.5 Representacion de sistemas lineales donde las matrices dinamicas son bloques de Jordan. Un bloque de Jordan de primer ordense puede representar como un integrador con realimentacionλ , como mostrado a la izquierda. Un bloque de Jordan de orden dos es mostradoa la derecha.
Una vez que una matriz esta en la forma de Jordan, el exponencial de la matriz puede ser calculado en terminos delos bloques de Jordan, usando la forma diagonal por bloques deJ:
eJ =
eJ1 0 ... 0 00 eJ2 0 0 0...
......
0 0 eJk−1 00 0 ... 0 eJk
. (4.7)
Los exponenciales de los bloques de Jordan pueden a su vez serescritos como:
eJi t =
1 t t22! ... tn−1
(n−1)!
0 1 t ... tn−2
(n−2)!... 1
......
. .. t0 ... 0 1
eλi t . (4.8)
4.1.3. Teorema de Cayley-Hamilton
El teorema de Cayley-Hamilton establece que una matrizA satisface su propia ecuacion caracterıstica. La ecuacioncaracterıstica de una matriz es la ecuacion:
α(λ )≡ det(λ I −A) = λ n+ ...+a1λ +aoλ 0
El teorema de Cayley-Hamilton establece que:α(A) = 0. (4.9)
Probaremos el teorema de Cayley-Hamilton para el caso deA siendo diagonalizable. Considerandoα(A), siendoqueA se puede escribir comoA= MΛM−1, encontramos que:
α(A) = Mα(Λ)M−1.

48 4 Formas canonicas
Peroα(Λ) actua separadamente en cada uno de los elementos de la matriz diagonal. Como cada uno de los elementossatisfaceα(λ ) = 0, encontramos queα(Λ) = 0. De aqui concluimos queα(A) = 0. ⋄
Una consecuencia simple del teorema de Cayley-Hamilton es que cualquier potencia deA se puede expresar enterminos deI ,A, ...,An−1. Considerese, por ejemplo,An. De (??) vemos que:
An =−(an−1An−1+ ...+a1A+aoI)
4.2. Forma canonica modal
Considerando un sistema de multiples entradas y salidas, contınuo en el tiempo, representado por:
x(t) = Ax(t)+Bu(t),y(t) =Cx(t),
(4.10)
dondeA ∈ Rn×n, B ∈ R
n×m y C ∈ Rp×n. Observamos que la descomposicion modal (en modos) deA lleva a una
representacion espacio de estados muyutil. Dado queA= MΛM−1, la transformacion de estados se puede hacer pormedio dez= Tx, T = M−1, resultando en:
z(t) = Λz(t)+M−1Bu(t),y(t) =CMz(t).
(4.11)
Esta representacion es denominada de forma canonica modal, dado que los estados son simplemente las amplitudesmodales. Los estados son desacoplados enΛ pero pueden estar acoplados a traves de los mapeamientos de entradaM−1B y salidaCM. La forma modal es robusta en cuestiones de calculo numerico.
4.2.1. Ejemplo: Sistema de multiples entradas y multiples salidas
Considere el modelo del sistema dinamico como sigue:
x =
5 4 24 5 22 2 2
x+
0 11 11 0
u,
y =
[1 4 21 1 2
]
x+
[1 00 1
]
u
Luego, el calculando los autovalores deA tenemos:
det(A−λ I3) = det
5−λ 4 24 5−λ 22 2 2−λ
=−λ 3+12λ 2−21λ +10=−(λ −1)2(λ −10)
,
y vemos que los autovalores asociados deA sonλ = 1 y λ = 10. Buscando los autovectores correspondientes:
5−λ 4 24 5−λ 22 2 2−λ
∣∣∣∣∣∣λ=1
v=
4 4 24 4 22 2 1
v= λv= v,
entonces:
v1 =
−102
,v2 =
−110
,

4.3 Forma canonica controlable 49
y:
5−λ 4 24 5−λ 22 2 2−λ
∣∣∣∣∣∣λ=10
v=
−5 4 24 −5 22 2 −8
v= λv= v,
entonces:
v3 =
221
.
Con los tres autovectoresv1, v2 y v3 siendo linealmente independientes podemos definirM tal que la matriz de estados
se pueda diagonalizar:M =
−1 −1 20 1 22 0 1
. Entonces:
Λ =
−1 −1 20 1 22 0 1
−1
5 4 24 5 22 2 2
−1 −1 20 1 22 0 1
=
1 0 00 1 00 0 10
,
M−1B=
−1 −1 20 1 22 0 1
−1
0 11 11 0
CM =
[1 4 21 1 2
]
−1 −1 20 1 22 0 1
4.3. Forma canonica controlable
4.3.1. Caso, sistema de una entrada
Considerando un sistema de una entrada una salida, un sistema contınuo en el tiempo es representado por:
x(t) = Ax(t)+bu(t), (4.12)
dondeA∈ Rn×n y b∈ R
n. Si se asume que el sistema es alcanzable, o, equivalentemente, controlable1, significa que:
rango([
b Ab ... An−1b]) = n. (4.13)
y a la matrizWc =[
b Ab ... An−1b]
se le denominamatriz de controlabilidad.Eligiendo laultima fila de la inversa de la matriz controlabilidad, seaq1 tal fila, definimos la matriz de transforma-
cionT como:
T =
q1
q1A...
q1An−1
. (4.14)
Notese queT es invertible, dado que:
1 Esta distincion solo existe en el caso de sistemas no lineales.

50 4 Formas canonicas
T[
b Ab ... An−1b]=
0 0 ... 0 10 0 ... 1 x...
......
...1 x ... x x
. (4.15)
Los elementosx en la matriz son elementos que existen pero no son de nuestro interes. Considerando la transformacionz= Tx, en el nuevo sistema coordenado, el modelo del sistema es:
z(t) = TAT−1x(t)+Tbu(t)= Az(t)+ bu(t).
(4.16)
Las matricesA y b tienen estructuras particulares que definiremos a continuacion. Analizando primero la estructura deb, conq1 siendo laultima fila de la inversa de la matriz de controlabilidad, tenemos:
q1b= q1Ab= ...= q1An−2b= 0, (4.17)
y,q1An−1b= 1. (4.18)
Entonces:
b= Tb=
q1
q1Ab...
q1An−2bq1An−1b
=
00...01
. (4.19)
La estructura deA es revelada considerando la relacionTAT−1 = A representada por:
TA= AT. (4.20)
El lado izquierdo de la matriz esta dado por:
TA=
q1Aq1A2
...q1An−1
q1An
. (4.21)
Por el teorema de Cayley-Hamilton, tenemos:
An =−aoIn−a1A− ...−an−1An−1, (4.22)
y luegoq1An =−aoq1−a1q1A− ...−an−1q1An−1. (4.23)
Comparando ambos lados de la ecuacion TA= AT y usando el teorema de Cayley-Hamilton obtenemos queA debeser como descrito a continuacion:
A=
0 1 0 ... 0 00 0 1 ... 0 0...
......
0 0 0 ... 0 1−ao −a1 −a2 ... −an−2 −an−1
. (4.24)
Notese que los coeficientes del polinomio caracterıstico deA son inmediatamente aparentes inspeccionando laultimafila deA.

4.3 Forma canonica controlable 51
Ejemplo, sistema de una entrada
Considere el modelo del sistema dinamico como sigue:
x=
0 0 1 00 0 0 1−2 1 0 01 −1 0 0
x+
0010
u.
La matriz de controlabilidad es:Wc =[
b Ab A2b A3b]=
0 1 0 −20 0 0 11 0−2 00 0 1 0
, luego el sistema es controlable dado queWc
es no singular. Calculando laultima fila de la inversa de la matriz de controlabilidad encontramos que es[
0 1 0 0].
Luego la matriz de transformacionT es definida como:
T =
q1
q1Aq1A2
q1A3
=
0 1 0 00 0 0 11 −1 0 00 0 1−1
.
Las matricesA y b en el nuevo sistema coordenado tienen la forma:
A= TAT−1 =
0 1 0 00 0 0 11 −1 0 00 0 1−1
0 0 1 00 0 0 1−2 1 0 01 −1 0 0
1 0 1 01 0 0 00 1 0 10 1 1 0
=
0 1 0 00 0 1 00 0 0 1−1 0−3 0
,
y:
b= Tb=
0001
4.3.2. Caso, sistema de multiples entradas
A continuacion, generalizaremos el metodo que transforma sistemas a su forma canonica controlable para el casode sistemas de mas de una entrada. Sea el sistema dinamico:
x(t) = Ax(t)+Bu(t), (4.25)
dondeA∈ Rn×n y B∈ R
n×m, m≤ n, y rango columna(B)=m por simplicidad2. La matriz de controlabilidad se puederepresentar como:
Wc =[
b1 b2 ... bm Ab1 Ab2 ... Abm ... An−1b1 ... An−1bm]. (4.26)
dondebi , i = 1,2, ...,m, es lai-esima columna deB. Asumiendo que la matriz presentada en (4.26) es de rango filacompleto (n filas linealmente independientes), luego, podemos seleccionarn columnas linealmente independientes en(4.26). Elegimos estas columnas de la derecha a la izquierda, luego rearreglando las columnas seleccionadas formarmosla siguiente matriz no singularL:
L =[
b1 Ab1 ... Ad1−1b1 b2 ... Ad2−1b2 ... bm ... Adm−1bm]. (4.27)
2 Esta suposicion es hecha por conveniencia, para simplificar el calculo. Esta suposicion implica que todas las entradas son mutualmenteindependientes, que viene a ser el caso en aplicaciones practicas.

52 4 Formas canonicas
Losm enterosdi son denominadosındices de controlabilidad y satisfacen:
m
∑i=1
di = n. (4.28)
Observese que lasm columnas deB estan presentes enL ya que hemos asumido queB es de rango columna completo(m columnas linealmente independientes). Sea:
σk =k
∑i=1
di , for k= 1,2, ...,m. (4.29)
Notese queσ1 = d1, σ2 = d1+d2, ..., σm = n. Seleccionando lasm filas correspondientes deL−1 y denotandolas porqk, dondeqk es laσ -esima fila deL−1, formamos la siguiente matrizn×n:
T =
q1
q1A...
q1Ad1−1
q2...
q2Ad2−1
...qm...
qmAdm−1
. (4.30)
Se puede probar queT es no singular calculando el productoTL y observando que det(TL) = ±1. Definiendo latransformacion de variables de estadoz= Tx; y usando el mismo argumento que en el caso de un sistema de unaentrada, obtenemos queA= TAT−1 y B= TB, donde:
A=
0 1 0 ... 0 0 0 ... 0 ... 0 0 ... 00 0 1 ... 0 0 0 ... 0 ... 0 0 ... 0
......
......
...x x x ... x x x ... x ... x x ... x0 0 0 ... 0 0 1 ... 0 ... 0 0 ... 0...
......
. .....
......
0 0 0 ... 0 0 0 ... 1 ... 0 0 ... 0x x x ... x x x ... x ... x x ... x...
..... .
...0 0 0 ... 0 0 0 ... 0 ... 0 1 ... 0...
......
. .....
......
0 0 0 ... 0 0 0 ... 0 ... 0 0 ... 1x x x ... x x x ... x ... x x ... x
. (4.31)
Notese que losm bloques diagonales enA tiene la estructura de la forma canonica controlable para el caso de unaentrada. Las dimensiones de cada bloque sondi ×di , i = 1,2, ...,m. Los bloques fuera de la diagonal tienen elementoque son ceros, excepto por laultimas filas. Luego, toda la informacion deA y A se puede calcular conociendo losındices de controlabilidad. La matrizB tiene la forma:
4.3 Forma canonica controlable 53
B=
0 0 ... 0 00 0 ... 0 0...
...1 x x x x0 0 ... 0 00 0 ... 0 0...
...0 1 x x x...
...0 0 ... 0 00 0 ... 0 0...
...0 0 0 0 1
. (4.32)
Ejemplo, sistema de mutiples entradas
Considere el modelo del sistema dinamico como sigue:
x=
−1 1 0 11 1 0 00 0 4 01 1−1 2
x+
1 12 01 00 1
u.
Siguiendo el algoritmo para obtener la forma canonica controlable del sistema, obtenemos que:
rango([
b1 b2 Ab1 Ab2 A2b1 A2b2 A3b1 A3b2]) = 4.
Luego,d1 = d2 = 2. A continuacion formamosL:
L =[
b1 Ab1 b2 Ab2]=
1 1 1 02 3 0 11 4 0 00 2 1 3
,
y:
L−1 =
0,20 0,60 0,40 −0,20−0,05−0,15 0,35 0,050,85 −0,45 0,05 0,15−0,25 0,25 −0,25 0,25
.
Entonces:q1 =
[−0,05−0,15 0,35 0,05
],
y:q2 =
[−0,25 0,25−0,25 0,25
].
La matriz de transformacion es:
T =
q1
q1Aq2
q2A
=
−0,05−0,15 0,35 0,05−0,05−0,15 1,35 0,050,85 −0,45 0,05 0,15−0,25 0,25 −0,25 0,25
.

54 4 Formas canonicas
Las matricesA y B tienen la siguiente forma:
TAT−1 =
0 1 0 0−4 5 0 00 0 0 13 −3 4 1
y TB=
0 01 00 00 1
.
4.4. Forma canonica observable
En esta parte usaremos el concepto de dualidad y, en base a losalgoritmos antes presentados para transformarsistemas alcanzables a su forma controlable, derivaremos resultados analogos para sistemas observables.
4.4.1. Caso, sistema de multiples salidas
Considerando el modelo de un sistema dinamico observable:
x(t) = Ax(t)y(t) =Cu(t),
(4.33)
dondeA∈Rn×n, C∈R
p×n, p≤ n, y rango(C)=p. Se omite la entradau por conveniencia. Considerando el modelo delsistema dualasociado con el sistema (4.33).
w(t) = ATw(t)+CTv(t). (4.34)
Siendo que el sistema (4.33) es observable, el sistema dual (4.34) es alcanzable. Luego podemos transformar el sis-tem dual (4.34) en su forma canonica controlable usando los algoritmos descritos en la seccion anterior. Finalmente,tomamos el resultado dual para obtener:
˙x(t) = Ax(t),y(t) = Cx(t),
(4.35)
donde:
A=
A11 A12 ... A1p
A21 A22 ... A2p...
...Ap1 Ap2 ... App
, (4.36)
donde cada matriz diagonalAii ∈ Rdi×di tiene la forma:
Aii =
0 0 ... 0 x1 0 ... 0 x...
. .....
0 0 ... 1 x
, (4.37)
que es justamente la transpuesta de la forma canonica controlable para el caso de una entrada. Los enterosdi , i = 1,2, ..pson losındices de controlabilidad del sistema en (4.35). Las matrices fuera de la diagonalA ji , j 6= i deA tienen la forma:
A ji =
0 0 ... 0 x0 0 ... 0 x...
.. ....
0 0 ... 0 x
. (4.38)

4.4 Forma canonica observable 55
La matrizC consiste dep bloques y tiene la forma:
C=
0 0 ... 1 0 0 ... 0 ... 0 0 ... 00 0 ... x 0 0 ... 1 ... 0 0 ... 0...
......
......
...0 0 ... x 0 0 ... x ... 0 0 ... 1
. (4.39)
Los p ındices de controlabilidad de (4.35) son los llamadosındices de observabilidaddel sistema en (4.34). Noteseque:
p
∑i=1
di = n. (4.40)
Ejemplo, sistema de multiples salidas
Dado el modelo del sistema observable como sigue:
x =
0 0 1 01 0 2 00 1 3 00 0−21 5
x
y(t) =
[1 0 0 00 0 0 1
]
x
.
Trabajando con el sistema dual para obtener la forma controlable: primero formamos la matriz de controlabilidad; luegoprocedemos a seleccionar de izquierda a derecha las primeras 4 columnas linealmente independientes. Ellas tienen laforma:
cT1 ,c
T2 ,A
TcT1 ,(A
T)2cT1 .
Luego, los indices de observabilidad sond1 = 3 y d2 = 1. Luego, formandoL:
L =[
cT1 ATcT
1 (AT)2cT1 cT
2
]=
1 0 0 00 0 1 00 1 3 00 0 0 1
,
y:
L−1 =
1 0 0 00 −3 1 00 1 0 00 0 0 1
.
Entonces los dos vectores necesarios para obtener la transformacion deseada son:
q1 =[
0 1 0 0],
y:q2 =
[0 0 0 1
].
La matriz de transformacion es:
T =
q1
q1Aq2
q2A
=
0 1 0 00 0 1 01 2 3−210 0 0 1
.
Las matricesA y C tienen la siguiente forma:

56 4 Formas canonicas
A= T−TATT =
0 0 1 01 0 2 00 1 3 00 0−1055
y C=CTT =
[0 0 1 00 0−21 1
]
.
4.5. Representaciones espacio de estados en formas canonicas a partir de funciones detransferencia del sistema
En las secciones anteriores se ha descrito la forma de obtener ciertas formas canonicas partiendo de una repre-sentacion espacio de estados dada, en esta parte nos centraremos en obtener representaciones espacio de estados en susformas canonicas partiendo de la funcion de transferencia del sistema.
Considere un sistema definido por:
dnydtn
+an−1dn−1ydtn−1 + ...+a1
dydt
+aoy= bndnudtn
+bn−1dn−1udtn−1 + ...+b1
dudt
+bou (4.41)
dondeu es la entrada yy es la salida. Esta ecuacion tambien puede ser escrita como:
Y(s)U(s)
= g(s) =bnsn+bn−1sn−1+ ...+b1s+bo
sn+an−1sn−1+ ...+a1s+ao=
n(s)d(s)
(4.42)
A continuacion se presentaran las representaciones espacio de estados correspondientes en su forma canonica contro-lable, observable y modal.
4.5.1. Forma canonica controlable
La siguiente representacion es la forma canonica controlable:
x1
x2...
xn−1
xn
=
0 1 0 ... 0 00 0 1 ... 0 0...
......
...0 0 0 ... 0 1−ao −a1 −a2 ... −an−2 −an−1
x1
x2...
xn−1
xn
+
00...01
u. (4.43)
y=[
bo−aobn b1−a1bn ... bn−1−an−1bn]
x1
x2...
xn−1
xn
+bnu (4.44)
La forma canonica controlable es importante en el diseno de sistemas de control por ubicacion de polos. Las ecuaciones(4.43) y (4.44) son derivadas de la siguiente forma. Sibn 6= 0 entonces:

4.5 Representaciones espacio de estados en formas canonicas a partir de funciones de transferencia del sistema 57
g(s) =bn
[
sn+bn−1bn
sn−1+ ...+ b1bn
s+ bobn
]
d(s)
=bn
[
sn+bn−1bn
sn−1+ ...+ b1bn
s+ bobn−d(s)+d(s)
]
d(s)
=bn
[
sn+bn−1bn
sn−1+ ...+ b1bn
s+ bobn−d(s)
]
d(s)︸ ︷︷ ︸
estrictamente propia
+bn
entoncesfuncion de transferencia propia = funcion de transferencia estrictamente propia + constante, en otras palabras,g(s) = h(s)+bn y bn es simplemente la matrizD. Ahora suponiendo que:
h(s) =cn−1sn−1+ ...+cn
sn+an−1sn−1+ ...+a1s+ao=[cn−1sn−1+ ...+cn
] 1d(s)
y (4.43) y (4.44) siguen por construccion.
4.5.2. Forma canonica observable
La siguiente representacion es la forma canonica observable:
x1
x2...
xn−1
xn
=
0 0 0 ... 0 −ao
0 0 0 ... 0 −a1...
......
...0 0 0 ... 0 −an−2
0 0 0 ... 1 −an−1
x1
x2...
xn−1
xn
+
bo−aobn
b1−a1bn...0
bn−1−an−1bn
u. (4.45)
y=[
0 0 ... 0 1]
x1
x2...
xn−1
xn
+bnu (4.46)
Notar que la matriz de estadosn× n de la ecuacion (4.45) es la transpuesta de la matriz de estados de la ecuacion(4.43).
4.5.3. Forma canonica modal
Considere la funcion de transferencia definida por (??). Aqui consideramos el caso donde el polinomio del denom-inador posee raices distintas. Para el caso de raices distintas, (??) puede ser escrita como:
Y(s)U(s) =
bnsn+bn−1sn−1+ ...+b1s+bo
(s+ p1)(s+ p2)...(s+ pn)
= bn+c1
s+ p1+
c2
s+ p2+ ...+
cn
s+ pn
(4.47)
La forma canonica diagonal esta dada por:

58 4 Formas canonicas
x1
x2...
xn−1
xn
=
−p1 0 0 ... 0 00 −p2 0 ... 0 0...
......
...0 0 0 ... −pn−1 00 0 0 ... 0 −pn
x1
x2...
xn−1
xn
+
11...11
u. (4.48)
y=[
c1 c2 ... cn−1 cn]
x1
x2...
xn−1
xn
+bnu (4.49)
Fuente: Capıtulos 5 y 8 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astromy Richard M. Murray.
Fuente: Capıtulo 2 del libroSystems and Controlde Stanislaw H. Zak (2002).Fuente: Capıtulo 4 del libroMultivariable Feedback Controlde S. Skogestad y I. Postlethwaite (2006).

Capıtulo 5Control por realimentaci on de estados
El mundo real es no lineal, sin embargo existen un numero de razones para investigar sistemas lineales. Los sistemaslineales se usan a menudo para aproximar sistemas no lineales. Muchas veces, esta aproximacion es suficiente para eldiseno del controlador. El conocimiento de la teorıa de sistemas lineales ayuda tambien a entender la complicada teorıade sistemas no lineales.
En esta parte, analizaremos mas conceptos basicos de sistemas lineales. La forma general del sistema lineal en laforma de espacio de estados, con correspondiente ecuacion de salida, es:
dxdt
= Ax+Bu,
y =Cx+Du,(5.1)
dondeA∈ Rn×n, B∈ R
n×m, C∈ Rp×n y D ∈ R
p×m.
5.1. Controlabilidad
Decimos que el sistema dinamico descrito por la ecuacion (5.1) o el parn-dimensional (A,B) es controlablesiexiste una ley de controlu(t) que transfiere cualquier estado inicialxo = x(to) en cualquier tiempoto a un estado finalxf = x(t f ) del espacio de estados en un tiempot f > to. De otra forma, el sistema o par (A,B) enno controlable.
Teorema 1Las siguientes condiciones son equivalentes:
1. El parn-dimensional (A,B) es controlable.2. La matriz de controlabilidadn×nm
Wc =[
B AB ... An−1B]= n
tiene rango de fila completo.3. Lasn filas de la matrize−AtB son linealmente independientes para todot ∈ [0,∞).4. La matriz
Vc(t) =∫ t
0e−AτBBTe−AT τdτ =
∫ t
0e−A(t−τ)BBTe−AT (t−τ)dτ
es no singular para todot > 0.
⋄Demostracion Probando la implicacion 1→ 2; esto es, si el par (A,B) es controlable entonces la llamada matriz de
controlabilidad[
B AB ... An−1B]∈ R
n×mn
es de rango de fila completo. Probaremos este enunciado por contradiccion (∼ 2→∼ 1). Entonces, asumimos que:rango
[B AB ... An−1B
]< n; entonces, existe una vector constante de ordenn, q 6= 0 tal que:
qTB= 0T , qTAB= 0T , ...qTAn−1B= 0T .
59

60 5 Control por realimentacion de estados
Por el teorema de Cayley-Hamilton, la matrizA satisface su propia ecuacion caracterıstica. Entonces:
An =−an−1An−1− ...−a1A−aoIn.
Luego:qTAnB= 0T = qT(−an−1An−1B− ...−a1AB−aoB) = 0T .
Por induccion obtenemos:qTAiB= 0T , parai = n+1,n+2, ...
Ahora seax(0) = 0 y x(t f ) = q. Ahora mostraremos que no existe ley de control que transfiera al sistema dex(0) = 0ax(t f ) = q. De la solucion de la ecuacion espacio de estados obtenemos:
q= eA(t f−to)x(0)+∫ t f
toeA(t f−τ)Bu(τ)dτ
q=∫ t f
0eA(t f−τ)Bu(τ)dτ .
Ahora premultiplicamos la ecuacion resultante porqT para obtener:
0 6= ‖q‖2 =∫ t f
0qTeA(t f−τ)Bu(τ)dτ = 0
porque
qTeA(t f−τ)B= qT(
B+(t f − τ)AB+(t f − τ2)
2!A2B− ...
)
= 0T .
Luego el sistema no puede ser transferido desdex(0) = 0 hastax(t f ) = q, y luego el sistema ˙x = Ax+Bu es nocontrolable. ⋄
5.1.1. Ejemplo: Motor DC
Maquinas de corriente contınua son bastante usadas en sistemas de control en lazo cerrado, en particular para elcontrol de velocidad y torque. Existen de diversos tamanos comenzando a partir de unos cuantos watts, accionados poramplificadores electronicos, a varios cientos de kilowatss, accionados por generadores Ward-Leonard. Servomotoresde bajo consumo de potencia se usan a menudo en instrumentacion, particularmente en sistemas de control de aviones,donde limitaciones de peso y espacio requieren de motores que provean el maximo de potencia por unidad de volumen.
Un cuerpo conductor que transporta corriente, cuando inmerso en un campo magnetico, experimenta una fuerzaproporcional a la magnitud del flujo, la corriente y la longitud del conductor, y elangulo entre el conductor y ladireccion del flujo. Cuando el conductor se localiza a una distancia fija de un eje, con respecto al cual puede rotar, segenera un torque proporcional al producto de la fuerza y el radio. En un motor, el torque resultante es la suma de torquesproducidos por conductores individualmente. Para un rotordado lasunicas dos cantidades que se pueden manipularson la corriente de armadura y el flujo. Luego, existen dos modos de operacion de un servomotor DC:a)modo porarmadura controlada yb) modo por campo controlado.
Control de armadura
En el motor DC de armadura controlada el campo es excitado de forma separada por una corriente constantei f apartir de una fuente DC fija. El flujo puede ser escrito comoφ = K f i f , K f constante. El torque desarrollado por elmotor es proporcional al producto deφ y la corriente en la armadura y la longitud de los conductores. Dado que elcampo es asumido constante, el torque desarrollado por el motor se puede expresar como:
τm = Ki ia.

5.1 Controlabilidad 61
Ra
Ieq
ea
if constant
La (negligible)
Figura 5.1 Modelo de un motor DC de armadura.
El torque del motor es usado para accionar el sistema que posee una inercia totalIeq. Asumiendo el caso ideal dondeel torque entregado es igual a la carga (en la practica no hay 100% de eficiencia). Entonces:
Ieqθ = Ki ia. (5.2)
dondeθ es la position angular del eje del motor.A medida que la armadura rota en un campo,esta desarrolla un voltaje inducidoeb en direccion opuesta al suministro
de armadura. Este voltaje se llama fuerza contra-electromotriz y es proporcional a la velocidad de rotacion θ y el flujocreado por el campo. Dado que el campo es constante, la fuerzacontra-electromotriz puede ser expresada como:
eb = Kbθ . (5.3)
dondeKb es la constante de voltaje del motor.El control de la velocidad del motor se obtiene ajustando el voltaje aplicado a la armadura. Su polaridad determina
la direccion de rotacion del motor. El diagrama esquematico del sistema motor DC de armadura se presenta en la Fig.5.1, dondeRa = 1Ω , La ∼ 0H, Kb = 5V/rad/sec,Ki = 5Nm/A, y el momento de inercia efectivo esIeq= 0,1kgm2. Lafriccion y la inercia del engranaje son despreciables.
Aplicando la ley del voltaje de Kirchoff al circuito de la armadura resulta:
Raia+Kbθ = ea. (5.4)
Sustituyendoia de (5.1) en la ecuacion arriba mostrada y dividiendo ambos lados porIeq resulta:
θ =Ki
Ieq
(ea−Kbθ
Ra
)
=KiKb
IeqRaθ +
Ki
IeqRaea.
Seax1 = θ , x2 = θ y u= ea. Luego tomando en cuenta los parametros del sistema, representamos la ecuacion arribamostrada en la forma de espacio de estados.
[x1
x2
]
=
[0 10 −250
][x1
x2
]
+
[050
]
u.
Primero formamos la matriz de controlabilidad del sistema:
Wc =[
B AB]=
[0 5050−12500
]
,
y verificamos que el sistema es controlable.Ahora encontraremos un controlu que transfiere el sistema desde un estado inicialx(to) =
[10 1
]Tal estado final
x(2) =[
0 0]T
. Recuerde que la solucion del sistema controlado tiene la forma:

62 5 Control por realimentacion de estados
x(t) = eA(t−to)x(to)+∫ t
toeA(t−τ)Bu(τ)dτ .
Nuestro objetivo es encontraru tal que:
0= x(2) = e2Ax(0)+∫ 2
0eA(2−τ)Bu(τ)dτ .
Se puede verificar queu tiene la forma:
u(t) =−BTeA(2−t)(∫ 2
0eA(2−τ)BBTeAT (2−τ)dτ
)−1
e2Ax(0),
donde:
eAt = L−1(sI−A)−1=
[1 1
250(1−e−250t)0 e−250t
]
.
Entonces:(∫ 2
0eA(2−τ)BBTeAT (2−τ)dτ
)−1
=
∫ 2
0
[1 1
250(1−e−250(2−τ))
0 e−250(2−τ)
][050
][
0 50][
1 01
250(1−e−250(2−τ)) e−250(2−τ)
]
dτ
=
[0,07976 0,02
0,02 5
]
La inversa de la matriz arriba es:
=
[12,5502−0,0502−0,0502 0,2002
]
.
Entonces:
u(t) =−[
0 50][
1 01
250(1−e−250(2−τ)) e−250(2−τ)
][12,5502−0,0502−0,0502 0,2002
]
e2A[
101
]
u(t) = 50,22e250t−500−25,11.
La estrategia de control arriba mostrada transfiere el sistema dex(0) =[
10 1]T
ax(2) =[
0 0]T
.Graficas dex1 y x2 versus tiempo son mostradas en la Fig. 5.2. Una grafica deu versus tiempo esta dada en la Fig.
5.3.
x1
x2
12
10
8
6
4
2
0
0 0.5
2
4
61
Time (sec)
1.5 2
Figura 5.2 Variables de estado versus tiempo.
30
20
0 0.530
1
Time (sec)
u
1.5 2
10
0
10
20
Figura 5.3 Accion de control versus tiempo.

5.1 Controlabilidad 63
Control de campo
La Fig. 5.4 muestra el diagram esquematico del motor DC de campo controlado donde la corriente de la armaduraes mantenida constante y el campo es suministrado a partir deun voltaje ajustableef .
540 INTRODUCTION TO CONTROL ENGINEERING
+
efif Lf
Rf
Ia = Const.
m
JB
Fig. A.19 Field controlled DC motorFigura 5.4 Motor DC de campo controlado.
El torqueτ desarrollado por el motor es proporcional al flujo creado porla corriente de armadura, la corriente delcampo y la longitud de los conductores. Para un motor dado, y dado que la corriente de armadura es constante, el torquepuede ser expresado como:
τ = KT i f , (5.5)
dondeKT es la constante de torque. Este torque es usado para mover ybacarda de inercia totalJ y para vencer lafriccion viscosa. Eso puede ser expresado, despreciando la constante de rigidezK, como:
τ = Jθm+Bθm. (5.6)
Aplicando la ley de voltaje de Kirchoff en el circuito del campo se obtiene:
ef = Rf i f +L f i f . (5.7)
La representacion espacio de estados se obtiene considerando a la posicion angular y su derivada como los primerosestados,x1 = θm, x2 = θm, la corriente de campo como el tercer estado,x3 = i f , y al voltaje del campo como la entradau= ef donde la posicion angular se considera como la saliday= θm = x1. Luego las matrices correspondientes son:
A=
0 1 00 −B/J KT/J0 0 −Rf /L f
, b=
00
1/L f
, c=[
1 0 0].
5.1.2. Sistema no controlable
Teorema 2El sistema ˙x= Ax+Buesno controlablesi y solo si existe una transformacion de similaridadz= Tx talque:
A= TAT−1 =
[A1 A2
0 A4
]
, , B= TB=
[B1
0
]
donde el sistema ˙xr = A1xr +B1u es controlable,A1 ∈ Rr×r , B1 ∈ R
r×m, y el rango de la matriz de controlabilidad delsistema ˙x= Ax+Bues igual ar.

64 5 Control por realimentacion de estados
Ejemplo de sistema no controlable
Para el modelo del sistema:
x=
−1 1 0 11 1 0 00 0 4 01 1−1 2
x+
1 10 00 00 1
u,
construir la transformacion de las variables de estado tal que en el nuevo sistema coordenado la parte controlable seaseparada de la parte no controlable.
Primero formamos la matriz de controlabilidad del sistema:
Wc =[
B AB A2B A3B]=
1 1−1 0 3 4−1 40 0 1 1 0 1 3 50 0 0 0 0 0 0 00 1 1 3 2 7 7 19
.
Usando el comando del MATLAB[Q,R]=qr(W_c) para obtener:
Q=
−1 0 0 00 0 −1 00 0 0 10 −1 0 0
, R=
−1 −1 1 0 −3 −4 1 −40 −1 −1 −3 −2 −7 −7 −190 0 −1 −1 0 −1 −3 −50 0 0 0 0 0 0 0
.
donde las matricesQ y R satisfacenWc = QR, dondeQ es una matriz ortogonal yR es una matriz triangular superiortal que el rangoR=rangoWc. Entonces, premultiplicando la matriz de controlabilidad, Wc, porQ−1 reduce esta matriz auna matriz de filas triangular superiorRporqueQ−1Wc = R. Seaz= Q−1x la transformacion de las variables de estado.Entonces en el nuevo sistema coordenado las matricesA y B toman la forma:
Q−1AQ=
−1 1 101 2 111 0 100 0 04
, andQ−1B=
−1 −10 −10 00 0
.
La dimension de la parte no controlable es 1.
5.1.3. Estabilizabilidad
Si los autovalores de la parte no controlada de un sistema ˙x=Ax+Buestan todo en el semiplano complejo izquierdoabierto- esto es, que la parte no controlada es asintoticamente estable- luego el sistema ˙x= Ax+Buesestabilizable.
En lo que sigue discutiremos metodos para el diseno de controladores por realimentacion para el caso de sistemaslineales. El proceso de diseno involucra tres pasos. En el primer paso asumimos que todoslos estados estan disponiblesy procedemos con el diseno de leyes de control por realimentacion de estados. Luego procedemos con el segundopaso; que corresponde al diseno del estimador, tambien denominado como el observador del vector de estados. Elultimo paso consiste en combinar los dos pasos anteriores tal que la ley de control, disenada en el primer paso, usael estimador de estados en vez de el vector de estados real. Elresultado de este paso es un compensador combinadocontrolador-estimador. A continuacion discutiremos el controlador por realimentacion de estados.
5.2. Control por realimentacion de estados
El estado de un sistema dinamico es una coleccion de variables que permiten la prediccion del desarrollo de unsistema a futuro. A continuacion exploraremos la idea de disenar la dinamica de un sistema a traves de realimentacion

5.2 Control por realimentacion de estados 65
de estados. La ley de control por realimentacion sera desarrollada paso a paso usando unaunica idea: la ubicacion delos autovalores del sistema en lazo cerrado en posiciones deseadas.
5.2.1. Estructura del controlador
La Fig. 5.5 muestra un diagrama de un sistema de control por realimentacion de estados tıpico. El sistema completoconsiste del proceso dinamico (planta), que es considerado lineal, los elementos del controladorK y kr , la entrada dereferencia (o senal de comando)r y procesos de disturbiod. El objetivo del controlador por realimentacion es regularla salida del sistemaz tal que rastree la senal de referencia aun en la presencia de disturbios y tambien incerteza en elproceso.
Figura 5.5 Sistema de control por realimentacion de estados. El controlador usa el estado del sistemax y la entrada de referenciar paracomandar el proceso (planta) a traves de su entradau. El disturbio es modelado a traves de una entrada aditivad.
Un elemento importante del dise no de control es la especificacion de desempeno. La especificacion mas simple dedesempeno es la de estabilidad: en la ausencia de disturbios, nuestro objetivo es hacer que el punto de equilibrio delsistema sea asintoticamente estable. A menudo, especificaciones de desempeno mas sofisticadas dotan de propiedadesdeseadas a una respuesta al escalon o a la respuesta en frecuencia del sistema, tales como tiempo de levantamiento,sobreimpulso y tiempo de establecimiento de la respuesta alescalon. Adicionalmente, una preocupacion frecuentees que el sistema posea propiedades de atenuacion de disturbios. Considerando un sistema descrito por la ecuaciondiferencial lineal:
x(t) = Ax(t)+Bu(t), x(0) = xo
z(t) =Cx(t)+Du(t),y(t) = Inx(t)
,
donde hemos ignorado el disturbiod por ahora. Nuestro objetivo es llevar la salidaz a una referencia deseadar ymantenerla alli.
5.2.2. Estabilizacion por realimentacion de estados
Asumiendo que todos los componentes del vector de estados pueden ser medidos. Dado que el estado en el tiempotcontiene toda la informacion necesaria para predecir el comportamiento futuro del sistema, la ley de control invarianteen el tiempo mas general es una funcion del estado y de la entrada de referencia:
u= α(x, r).
Si la ley de control por realimentacion de estados es asumida lineal, entonces la realimentacion se puede escribir comouna combinacion lineal de todas las variables de estado, incluyendo la referencia:
u=−Kx+kr r,

66 5 Control por realimentacion de estados
dondeK ∈ Rm×n es una matriz constante yr es el valor de referencia, asumido por ahora constante. El sistema en lazo
cerrado es entonces:x= Ax+B(−Kx+kr r), x(0) = xo
x= (A−BK)x+Bkr r, x(0) = xo
Los polos del sistema en lazo cerrado son las raices de la ecuacion caracterıstica:
det(sIn−A+BK) = 0.
La ley de control por realimentacion de estados consiste en seleccionar ganancias:
ki j , i = 1,2, ...,m, j = 1,2, ..,n,
tal que las raices de la ecuacion caracterıstica del sistema en lazo cerrado:
det(sIn−A+BK) = 0,
esten en las ubicaciones deseadas en el plano complejo. Si asumimos que el disenador ha hecho una seleccion de lospolos deseados del sistema en lazo cerrado, y ellos son:p1, p2, ..., pn. Los polos (del sistema en lazo cerrado) deseadospueden ser reales o complejos. Si son complejos, ellos debenestar en pares complejos conjugados. Esto es debido aluso de ganancias realeski j . Una vez que definimos los polos deseados, podemos formar el polinomio caracterıstico enlazo cerrado deseado,
αc(s) = (s− p1)(s− p2)...(s− pn)
αc(s) = sn+αn−1sn−1+ ...+α1s+αo.
Nuestro objetivo es seleccionar una matriz de realimentacion K tal que:
det(sIn−A+BK) = sn+αn−1sn−1+ ...+α1s+αo.
El problema arriba presentado es tambien llamadoproblema de ubicacion de poloso problema de asignacion deautovalores. Primero discutiremos el problema de ubicacion de polos para una planta con una entrada.
Ubicacion de polos para sistemas de una entrada
En este caso,K = k∈ R1×n. La solucion de este problema se obtiene facilmente si el sistema ˙x(t) = Ax(t)+bu(t)
ya esta en la forma canonica controlable. En tal caso tenemos:
A−bk=
0 1 0 ... 0 00 0 1 ... 0 0...
...0 0 0 ... 0 1
−ao−k1 −a1−k2 −a2−k3 ... −an−2−kn−1 −an−1−kn
.
Entonces, las ganancias deseadas son:k1 = αo−ao,k2 = α1−a1,
...kn = αn−1−an−1
.
Si el sistema ˙x(t) = Ax(t)+bu(t) no esta en la forma canonica controlable, primero transformamos el sistema en laforma canonica y luego calculamos el vector de gananciask tal que:
det(sIn− A+ bk) = sn+αn−1sn−1+ ...+α1s+αo.

5.2 Control por realimentacion de estados 67
Entonces,k=
[αo−ao α1−a1 ... αn−1−an−1
].
Luego:k= kT,
dondeT es la transformacion que lleva al sistema ˙x(t) = Ax(t)+bu(t) a la forma canonica controlable.Podemos representar la formula de arriba para la matriz de ganancias en una forma alternativa. Para esto, notese
que:
kT =[
αo−ao α1−a1 ... αn−1−an−1]
q1
q1A...
q1An−1
.
kT = q1(αoIn+α1A+ ...+αn−1An−1)−q1(aoIn+a1A+ ...+an−1An−1).
Por el teorema de Cayley-Hamilton, tenemos:
An =−(aoIn+a1A+ ...+an−1An−1).
Entonces:k= q1αc(A).
La expresion para el vector fila de ganancias fue propuesto por Ackermanen 1972 y ahora se conoce comoFormulade Ackermanpara ubicacion de polos.
Ejemplo, sistema de una entrada
Para el sistema dinamico lineal:
x=
[1 −11 −2
]
x+
[21
]
u,
usaremos la formula de Ackerman para disenar el controlador por realimentacion de estados,u = −Kx, tal que lospolos en lazo cerrado esten localizados en−1,−2.
Para usar la formula de Ackerman, primero formamos la matriz de controlabilidad del sistema ˙x(t) = Ax(t)+bu(t)y luego encontramos laultima fila de su inversa, denotada porq1. La matriz de controlabilidad es:
[b Ab
]=
[2 11 0
]
.
La inversa de la matriz arriba es: [0 11 −2
]
.
Entonces,q1 =[
1 −2]. El polinomio caracterıstico del sistema en lazo cerrado deseado es:
αc(s) = (s+1)(s+2) = s2+3s+2.
Luego,

68 5 Control por realimentacion de estados
k = q1αc(A)= q1(A2+3A+2I2)
= q1
([1 −11 −2
][1 −11 −2
]
+3
[1 −11 −2
]
+2
[1 00 1
])
= q1
([0 1−1 3
]
+
[3 −33 −6
]
+
[2 00 2
])
=[
1 −2][
5 −22 −1
]
=[
1 0]
Ubicacion de polos para sistemas de multiples entrada
Si el sistema ˙x(t) = Ax(t)+Bu(t) ya se encuentra en la forma canonica controlable, procedemos como a contin-uacion. Primero representamos la matrizB como:
B=
0 0 ... 0 00 0 ... 0 0...
...1 x x x x0 0 ... 0 00 0 ... 0 0...
...0 1 x x x...
...0 0 ... 0 00 0 ... 0 0...
...0 0 0 0 1
=
0 0 ... 0 00 0 ... 0 0...
...1 0 0 0 00 0 ... 0 00 0 ... 0 0...
...0 1 0 0 0...
...0 0 ... 0 00 0 ... 0 0...
...0 0 0 0 1
1 x x x x0 1 x x x...
.. ....
0 0 ... 1 x0 0 0 0 1
= BΓ
donde la matrizΓ es no singular y cuadrada que consiste de filas deB diferentes de cero. Luego, sea:
K = Γ K.
Notese que:
BK =
0 0 ... 0 00 0 ... 0 0...
...k11 k12 ... k1n−1 k1n
0 0 ... 0 00 0 ... 0 0...
...k21 k22 ... k2n−1 k2n...
...0 0 ... 0 00 0 ... 0 0...
...km1 km2 ... kmn−1 kmn
;

5.2 Control por realimentacion de estados 69
esto es, las filas no ceros en el productoBK coinciden con las filas no ceros de la matrizA en su forma canonicacontrolable. Si seleccionamos, por ejemplo, las gananciaski j , i = 1,2, ...,my j = 1,2, ...,n, tal que:
A−BK = A− BK =
0 1 0 ... 0 00 0 1 ... 0 0...
...0 0 0 ... 0 1−αo −α1 α2 ... αn−2 αn−1
;
donde:K = Γ−1K.
Si el sistema ˙x(t) = Ax(t)+Bu(t) no esta en la forma canonica controlable, primero lo llevaremos a esa forma y luegocalcularemos la matriz de ganancias que ubica los polos del sistema en lazo cerrado en las posiciones deseada para elsistema ˙x(t) = Ax(t)+Bu(t) en la forma canonica controlable. la matriz de ganancias que ubica los polos del sistemaen lazo cerrado en las posiciones pre-especificadas para el sistema ˙x(t) = Ax(t)+Bu(t) en sus coordinadas originaleses entonces dado por:
K = Γ−1KT.
dondeT es la matriz de transformacion que lleva al sistema ˙x(t) = Ax(t)+Bu(t) a la forma canonica controlable.
Ejemplo, multiples entradas
Para el sistema dinamico lineal:
x=
0 0 1 01 0 2 00 1 3 00 0−21 5
x+
1 00 00 00 1
u,
usaremos su forma canonica controlable para encontrar la matrizK ∈ R2×4 tal que los polos en lazo cerrado esten
ubicados en:−2,−3+−3+ i,−3− i,−4.
Primero transformamos ˙x(t) = Ax(t)+Bu(t) a la forma canonica controlable. Para eso, formamos la matriz de contro-labilidad:
[b1 b2 Ab1 Ab2 A2b1 ...
]=
1 0 0 0 0...0 0 1 0 0...0 0 0 0 1...0 1 0 5 0...
.
Entonces seleccionamos, procediendo de izquierda a derecha, las primeras cuatro columnas linealmente independientesde la matriz de controlabilidad. Obtenemos:
[b1 b2 Ab1 A2b1
].
Entonces, losındices de controlabilidad sond1 = 3 y d2 = 1. Rearreglamos las columnas y formamos la matrizLde la forma:
L =[
b1 Ab1 A2b1 b2]= I4 = L−1.
Lasultimas filas que necesitamos para la construccion de la matriz de transformacion son:
q1 =[
0 0 1 0]
andq2 =[
0 0 0 1].
La matriz de transformacion es:

70 5 Control por realimentacion de estados
T =[
q1 q1A q1A2 q2]=
0 0 1 00 1 3 01 3 11 00 0 0 1
.
Y el sistema ˙x(t) = Ax(t)+Bu(t) en el nuevo sistema coordenado tiene la forma:
A= TAT−1 =
0 1 000 0 101 2 30−21 0 05
and B= TB=
0 00 01 00 1
.
El polinomio caracterıstico del sistema en lazo cerrado es:
αc(s) = (s+2)(s+3− i)(s+3+ i)(s+4) = s4+12s3+54s2+108s+80.
Una posible eleccion de la matriz de gananciasK, dentro de tantas, que funciona para el caso esK tal que:
A− BK =
0 1 0 00 0 1 00 0 0 1−80−108−54−12
.
Notese queΓ = I2. Entonces:
K =
[1 2 3 −159 108 54 17
]
,
y luego:
K = KT =
[3 11 40 −154 270 977 17
]
.
El algoritmo aqui presentado para ubicacion de polos para sistemas de multiples entradas presenta mas un valorteorico antes que practico. EL algoritmo presenta problemas de implementacion numerica porque la transformaciondel sistema ˙x(t) = Ax(t)+Bu(t) a la forma canonica controlable sufre de propiedades numericas pobres. Existen otrosalgoritmos mas robustos, como los implementados en MATLAB, especificamente en la funcionplace.
La solucion del problema de ubicacion de polos para un sistema de multiples entradas no esunica. Entonces, losgrados de libertad restantes pueden ser usados para alcanzar objetivos secundarios. En la semanas siguientes discutire-mos un metodo para construir una ley de control lineal por realimentacion de estados que ubica los polos del sistemaen lazo cerrado en posiciones pre-especificadas y al mismo tiempo minimiza unındice de desempeno cuadratico.
Como resultado de la discusion en esta parte, enunciaremos un teorema fundamental de sistemas lineales:TeoremaEl problema de ubicacion de polos tiene solucion para todas las elecciones de losn polos en lazo cerrado,
simetricos con respecto al eje real, si y solo si el sistema ˙x(t) = Ax(t)+Bu(t) es controlable. ⋄
5.2.3. Desempeno. Control para la solucion en estado estacionario
Notese quekr no afecta la estabilidad del sistema (que es determinado porlos autovalores deA−BK) pero si afectala solucion en estado estacionario. En particular, el punto de equilibrio y la salida del sistema en lazo cerrado estandados por:
xe = 0= (A−BK)xe+Bkr r,
xe =−(A−BK)−1Bkr r,ze =Cxe+Due
entonceskr debe ser elegido tal queze = r (el valor deseado de la salida). Asumiendo queD = 0 (el caso mas comun),entonces:
ze = r =−C(A−BK)−1Bkr r,

5.2 Control por realimentacion de estados 71
luego para cuandokr sea un escalar (sistema de una entrada y una salida) tenemos:
kr =−1/(C(A−BK)−1B).
Notese quekr es exactamente la inversa de la ganancia en la frecuencia cero del sistema en lazo cerrado.
5.2.4. Especificaciones del diseno del control por realimentacion de estados
La ubicacion de los autovalores determina el comportamiento de la dinamica en lazo cerrado, y como consecuencia,la decision mas importante es donde ubicaremos los autovalores. Como en todos los casos de diseno de sistemas decontrol, existe una concesion mutua entre la magnitud de la entrada de control, la robustez del sistema a las perturba-ciones y el desempeno del sistema en lazo cerrado. En esta seccion revisaremos brevemente estas concesiones mutuascon el caso especial de sistemas de segunda orden.
Sistema de segunda orden
El sistema de segunda orden es una clase de sistema que ocurrefrecuentemente en el analisis y diseno de sistemasde relimentacion.
Un sistema de segunda orden se puede escribir como:
q+2ζ ωoq+ω2oq= kω2
ou, y= q.
En la forma de espacio de estados, el sistema se escribe como:
dxdt
=
[0 ωo
−ωo −2ζ ωo
]
x+
[0
kωo
]
u, y=[
1 0]x.
Los autovalores del sistema estan dados por:
λ =−ζ ωo±√
ω2o(ζ 2−1),
y observamos que el origen es un punto de equilibrio estable si ωo > 0 y ζ > 0. Notese que los autovalores soncomplejos siζ < 1 y reales en caso contrario.
La forma de la solucion depende del valor deζ , el cual se denomina factor de amortiguamiento del sistema.Siζ > 1, decimos que el sistema essobreamortiguado, y la respuesta natural (u= 0) del sistema esta dado por:
y(t) =βx1o+x2o
β −αe−αt − αx1o+x2o
β −αe−β t ,
dondeα = ωo(ζ +√
ζ 2−1) y β = ωo(ζ −√
ζ 2−1). Vemos que la respuesta consiste en la suma de dos senales quedecaen exponencialmente. Siζ = 1, entonces el sistema escriticamente amortiguadoy la solucion resulta:
y(t) = e−ζ ωot(x1o+(x2o+ζ ωox1o)t).
Notese que la respuesta es aun asintoticamente estable mientras queωo > 0, a pesar que el segundo termino en lasolucion este creciendo con el tiempo (pero mas lento que el termino exponencial decayente que lo multiplica).
Finalmente, si 0< ζ < 1, entonces la solucion es oscilatoria y se dice que el sistema essubamortiguado. Elparametroωo es conocido como lafrecuencia naturaldel sistema. La respuesta natural del sistema esta dado por:
y(t) = e−ζ ωot(x1ocosωdt +
(ζ ωo
ωdx1o+
1ωd
x2o
)
sinωdt),

72 5 Control por realimentacion de estados
dondeωd = ωo
√
1−ζ 2 es llamada la frecuencia amortiguada.Debido a la forma simple de un sistema de segunda orden, es posible resolver el sistema en forma analıtica para una
entrada del tipo escalon. Para este caso, la solucion depende deζ :
y(t) = k
(
1−e−ζ ωot cosωdt +ζ
√
1−ζ 2e−ζ ωot sinωdt
)
, ζ < 1
y(t) = k(
1−e−ζ ωot(1+ωot))
, ζ = 1
y(t) = k
(
1− 12(
ζ√
1−ζ 2+1)e−ζ ωot(ζ−
√ζ 2−1)+
12(
ζ√
1−ζ 2−1)e−ζ ωot(ζ+
√ζ 2−1)
)
, ζ > 1,
donde hemos tomadox(0) = 0.La Fig. 5.6 muestra respuestas de un sistema de 2da orden a unaentrada del tipo escalon conk= 1 y para diferentes
valores deζ . La forma de la respuesta es determinado porζ , y la velocidad de la respuesta es determinada porωo: larespuesta es mas rapida siωo es grande.
6.3. STATE FEEDBACK DESIGN 185
Re
Im
ζ = 0ζ = 0.4ζ = 0.7
ζ = 1
ζ = 1.2
(a) Eigenvalues
0 5 10 150
0.5
1
1.5
2
Normalized timeω0t
y
ζ
(b) Step responses
Figure 6.8: Step response for a second-order system. Normalized step responsesh for theFigura 5.6 Respuestas de un sistema de 2da orden a una entrada del tipo escalon unitario
Adicionalmente tambien podemos calcular las propiedades de la respuesta al escalon. Por ejemplo, para un sistemasubamortiguado:
y(t) = k
(
1− ζ√
1−ζ 2e−ζ ωot sin(ωdt +ϕ)
)
,
dondeϕ = arccosζ . El sobreimpulso maximo ocurrira por primera vez cuando la derivada dey sea cero, que se puedemostrar que es:
Mp = eπζ/√
1−ζ 2.
De la misma forma se pueden calcular otras caracterısticas de la respuesta al escalon, Cuadro 5.7.
6.3. STATE FEEDBACK DESIGN 185
Property Value ζ = 0.5 ζ = 1/√
2 ζ = 1
Steady-state value k k k k
Rise time Tr = 1/ω0 ·eϕ/ tanϕ 1.8/ω0 2.2/ω0 2.7/ω0
Overshoot Mp = e−πζ/√
1−ζ2 16% 4% 0%
Settling time (2%) Ts ≈ 4/ζω0 8.0/ω0 5.9/ω0 5.8/ω0
Figura 5.7 Propiedades de la respuesta al escalon para un sistema de 2do orden con 0< ζ < 1.

5.2 Control por realimentacion de estados 73
La respuesta en la frecuencia tambien puede ser calculada explıcitamente y esta dada por:
Meiθ =kω2
o
(iω)2+2ζ ωo(iω)+ω2o=
kω2o
ω2o +2iζ ωoω +−ω2
Una ilustracion grafica de la respuesta en frecuencia esta dada en la Fig. 5.8. Notese que el pico de la resonanciaaumenta a medida que creceζ .
186 CHAPTER 6. STATE FEEDBACK
Re
Im ζ ≈ 0ζ = 0.08
ζ = 0.2ζ = 0.5
ζ = 1
(a) Eigenvalues
10−2
100
102
Gai
n
10−1
100
101
−180
−90
0
Pha
se [d
eg]
Normalized frequencyω/ω0
ζ
ζ
(b) Frequency responses
Figura 5.8 Respuesta en frecuencia de un sistema de 2do orden.
Sistema de orden alto
Para sistemas de orden alto, la ubicacion de polos es considerablemente mas dificil, especialmente cuando tratamosde considerar las multiples concesiones mutuas presentes en el diseno de control por realimentacion.
Una de las razones por las que los sistemas de segundo orden son tan importantes en los sistemas de realimentaciones que aun para sistemas complicados la respuesta es a menudo caracterizada por losautovalores dominantes. Paradefinir los autovalores dominantes, consideremos el sistema con autovaloresλ j j = 1, ...,n. Definimos el factor deamortiguamiento para el autovalor complejo como:
ζ =−Reλ‖λ‖ .
Decimos que el par de autovalores complejos conjugadosλ , λ ∗ es unpar dominantesi tiene el menor factor de amor-tiguamiento comparado con los otros autovalores del sistema. Por consiguiente, se puede decir que el par dominante deautovalores sera el factor principal en la respuesta del sistema despues que los transientes debido a otros terminos (au-tovalores) hayan desaparecido. A pesar de que estoultimo no siempre se cumple, a menudo el caso de los autovaloresdominantes determinana la respuesta (al escalon) del sistema.
El unico requerimiento formal en la asignacion de autovalores es que el sistema sea controlable. En la practia existenotras restricciones porque la seleccion de autovalores tiene un gran efecto en la magnitud y la variacion del cambiode la senal de control. Autovalores grandes requeriran por lo general grandes senales de actuacion ası como tambienrapidos cambios de estas senales. La capacidad de los actuadores impondra restricciones en la posible ubicacion de losautovalores del sistema en lazo cerrado.
A continuacion, usaremos las gananciasK y kr para disenar la dinamica del sistema en lazo cerrado y satisfacernuestro objetivo. Los ejemplos a seguir pretender ilustrary proveer mayor intuicion en como construir tal ley decontrol por realimentacion de estados.

74 5 Control por realimentacion de estados
5.2.5. Ejemplo, sistema de balance
Considerando el sistema de la Fig. 5.9, recordemos que este sistema es un modelo para una clase de sistemas en losque el centro de masa es balanceado sobre un punto pivote.
MODELO DEL SISTEMA - puede ser NO LINEAL
Las ecuaciones (no lineales) de movimiento del sistema estan dados por:[(M+m) −mlcosθ−mlcosθ (J+ml2)
][pθ
]
+
[cp+mlsinθθ 2
γθ −mglsinθ
]
=
[F0
]
.
Por simplicidad tomamosc= γ = 0.
PUNTO DE EQUILIBRIO PARA LINEALIZACI ON - LINEALIZACI ON
Linealizando en torno al punto de equilibrioxe = (p,0,0,0), la matriz dinamica y la matriz de control son:
A=
0 0 1 00 0 0 10 m2l2g/µ 0 00 Mtmgl/µ 0 0
, B=
00
Jt/µlm/µ
,
dondeµ = MtJt −m2l2, Mt = M+my Jt = J+ml2.
ANALISIS DE SISTEMA
Controlabilidad:La matriz de controlabilidad es:
Wc =[
B AB A2B A3B]=
0 Jt/µ 0 gl3m3/µ2
0 lm/µ 0 gl2m2(M+m)/µ2
Jt/µ 0 gl3m3g/µ2 0lm/µ 0 g2l2m2(M+m)/µ2 0
.
El determinante de la matriz es:
det(Wc) =g2l4m4
µ4 6= 0,
y concluimos que el sistema es controlable. Esto significa que podemos mover el sistema desde una condicion ini-cial hasta un estado fina y, en particular, que siempre podemos encontrar una entrada que lleve el sistema desde unacondicion inicial hasta el punto de equilibrio.
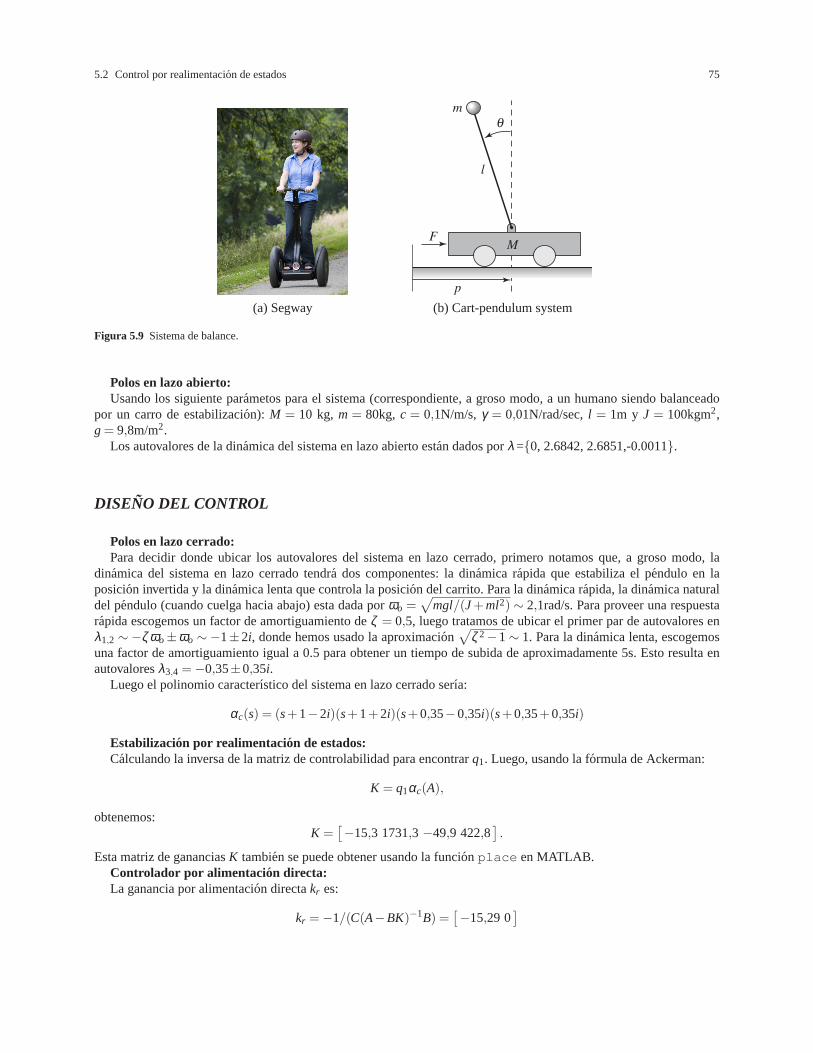
5.2 Control por realimentacion de estados 756.1. REACHABILITY 171
(a) Segway
MF
p
θ
m
l
(b) Cart-pendulum system
Figura 5.9 Sistema de balance.
Polos en lazo abierto:Usando los siguiente parametos para el sistema (correspondiente, a groso modo, a un humano siendo balanceado
por un carro de estabilizacion): M = 10 kg, m= 80kg, c = 0,1N/m/s,γ = 0,01N/rad/sec,l = 1m y J = 100kgm2,g= 9,8m/m2.
Los autovalores de la dinamica del sistema en lazo abierto estan dados porλ=0, 2.6842, 2.6851,-0.0011.
DISENO DEL CONTROL
Polos en lazo cerrado:Para decidir donde ubicar los autovalores del sistema en lazo cerrado, primero notamos que, a groso modo, la
dinamica del sistema en lazo cerrado tendra dos componentes: la dinamica rapida que estabiliza el pendulo en laposicion invertida y la dinamica lenta que controla la posicion del carrito. Para la dinamica rapida, la dinamica naturaldel pendulo (cuando cuelga hacia abajo) esta dada porωo =
√
mgl/(J+ml2) ∼ 2,1rad/s. Para proveer una respuestarapida escogemos un factor de amortiguamiento deζ = 0,5, luego tratamos de ubicar el primer par de autovalores enλ1,2 ∼ −ζ ωo±ωo ∼ −1±2i, donde hemos usado la aproximacion
√
ζ 2−1∼ 1. Para la dinamica lenta, escogemosuna factor de amortiguamiento igual a 0.5 para obtener un tiempo de subida de aproximadamente 5s. Esto resulta enautovaloresλ3,4 =−0,35±0,35i.
Luego el polinomio caracterıstico del sistema en lazo cerrado serıa:
αc(s) = (s+1−2i)(s+1+2i)(s+0,35−0,35i)(s+0,35+0,35i)
Estabilizacion por realimentacion de estados:Calculando la inversa de la matriz de controlabilidad para encontrarq1. Luego, usando la formula de Ackerman:
K = q1αc(A),
obtenemos:K =
[−15,3 1731,3 −49,9 422,8
].
Esta matriz de gananciasK tambien se puede obtener usando la funcionplace en MATLAB.Controlador por alimentaci on directa:La ganancia por alimentacion directakr es:
kr =−1/(C(A−BK)−1B) =[−15,29 0
]
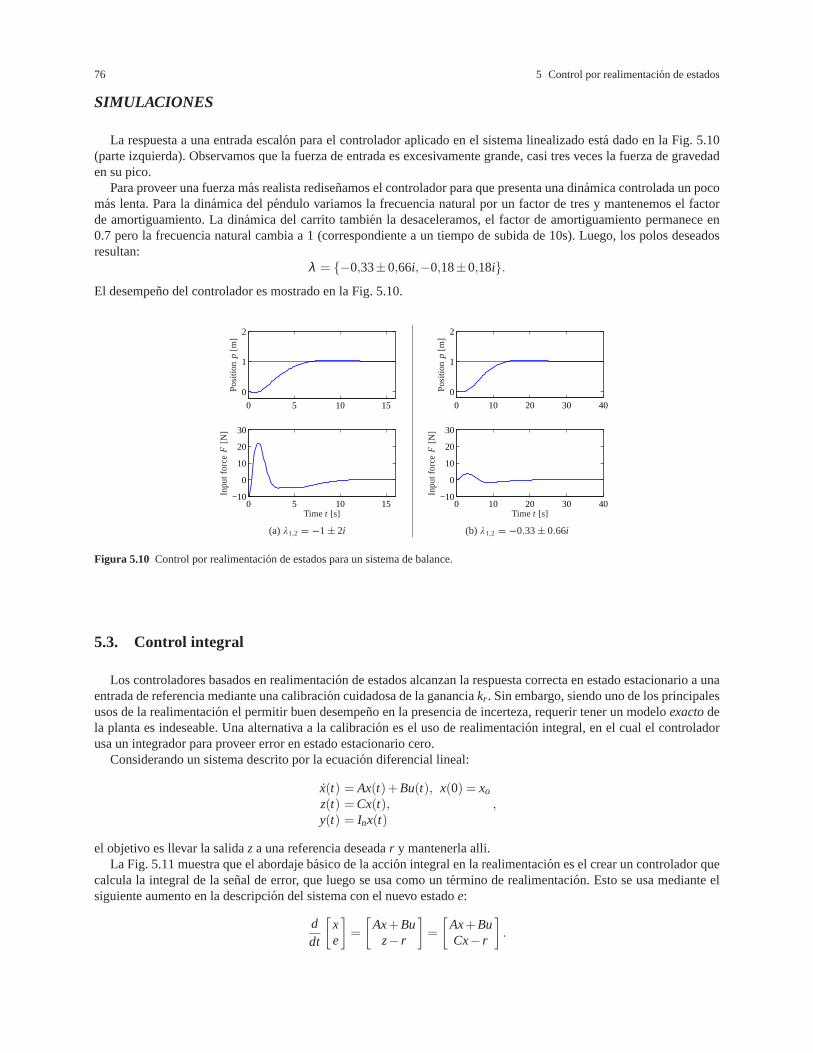
76 5 Control por realimentacion de estados
SIMULACIONES
La respuesta a una entrada escalon para el controlador aplicado en el sistema linealizado esta dado en la Fig. 5.10(parte izquierda). Observamos que la fuerza de entrada es excesivamente grande, casi tres veces la fuerza de gravedaden su pico.
Para proveer una fuerza mas realista redisenamos el controlador para que presenta una dinamica controlada un pocomas lenta. Para la dinamica del pendulo variamos la frecuencia natural por un factor de tres ymantenemos el factorde amortiguamiento. La dinamica del carrito tambien la desaceleramos, el factor de amortiguamiento permanece en0.7 pero la frecuencia natural cambia a 1 (correspondiente aun tiempo de subida de 10s). Luego, los polos deseadosresultan:
λ = −0,33±0,66i,−0,18±0,18i.El desempeno del controlador es mostrado en la Fig. 5.10.
190 CHAPTER 6. STATE FEEDBACK
0 5 10 15
0
1
2
0 5 10 15−10
0
10
20
30
Pos
ition
p[m
]
Time t [s]
Inpu
tfor
ceF
[N]
(a)λ1,2 = −1± 2i
0 10 20 30 40
0
1
2
0 10 20 30 40−10
0
10
20
30P
ositi
onp
[m]
Time t [s]
Inpu
tfor
ceF
[N]
(b) λ1,2 = −0.33± 0.66i
Linear Quadratic Regulators
Figura 5.10 Control por realimentacion de estados para un sistema de balance.
5.3. Control integral
Los controladores basados en realimentacion de estados alcanzan la respuesta correcta en estado estacionario a unaentrada de referencia mediante una calibracion cuidadosa de la gananciakr . Sin embargo, siendo uno de los principalesusos de la realimentacion el permitir buen desempeno en la presencia de incerteza, requerir tener un modeloexactodela planta es indeseable. Una alternativa a la calibracion es el uso de realimentacion integral, en el cual el controladorusa un integrador para proveer error en estado estacionariocero.
Considerando un sistema descrito por la ecuacion diferencial lineal:
x(t) = Ax(t)+Bu(t), x(0) = xo
z(t) =Cx(t),y(t) = Inx(t)
,
el objetivo es llevar la salidaz a una referencia deseadar y mantenerla alli.La Fig. 5.11 muestra que el abordaje basico de la accion integral en la realimentacion es el crear un controlador que
calcula la integral de la senal de error, que luego se usa como un termino de realimentacion. Esto se usa mediante elsiguiente aumento en la descripcion del sistema con el nuevo estadoe:
ddt
[xe
]
=
[Ax+Bu
z− r
]
=
[Ax+BuCx− r
]
.
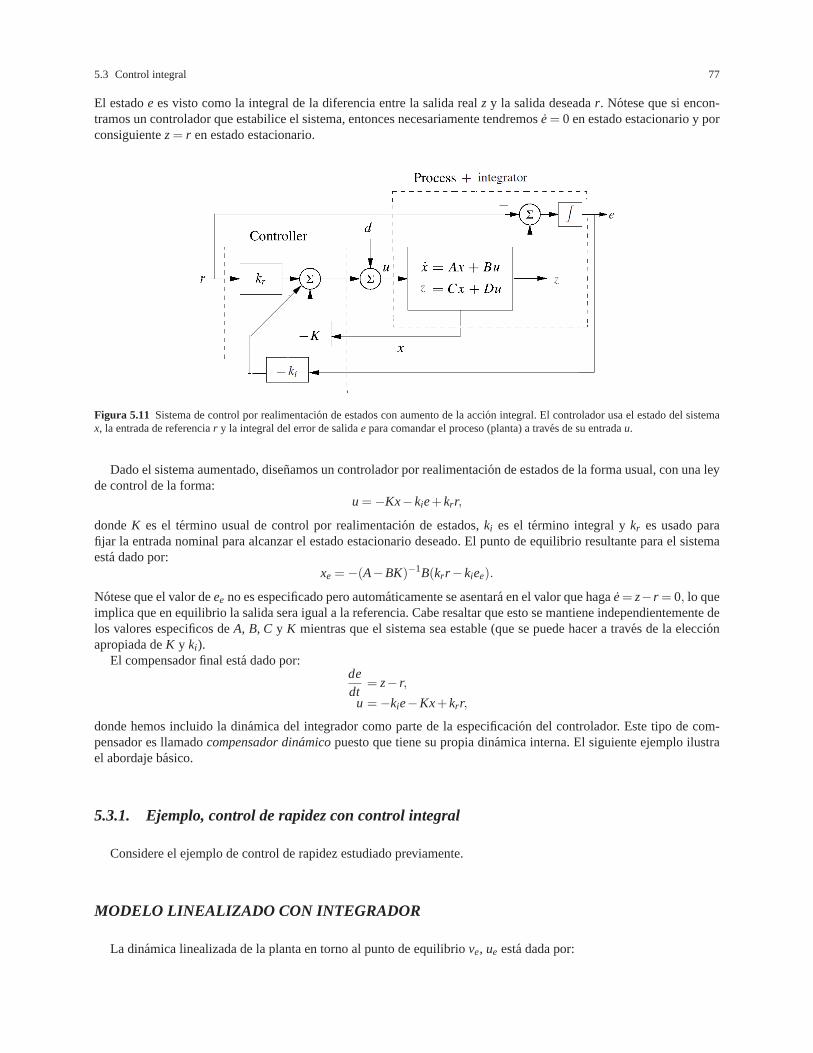
5.3 Control integral 77
El estadoe es visto como la integral de la diferencia entre la salida real z y la salida deseadar. Notese que si encon-tramos un controlador que estabilice el sistema, entonces necesariamente tendremos ˙e= 0 en estado estacionario y porconsiguientez= r en estado estacionario.
Figura 5.11 Sistema de control por realimentacion de estados con aumento de la accion integral. El controlador usa el estado del sistemax, la entrada de referenciar y la integral del error de salidaepara comandar el proceso (planta) a traves de su entradau.
Dado el sistema aumentado, disenamos un controlador por realimentacion de estados de la forma usual, con una leyde control de la forma:
u=−Kx−kie+kr r,
dondeK es el termino usual de control por realimentacion de estados,ki es el termino integral ykr es usado parafijar la entrada nominal para alcanzar el estado estacionario deseado. El punto de equilibrio resultante para el sistemaesta dado por:
xe =−(A−BK)−1B(kr r−kiee).
Notese que el valor deee no es especificado pero automaticamente se asentara en el valor que haga ˙e= z− r = 0, lo queimplica que en equilibrio la salida sera igual a la referencia. Cabe resaltar que esto se mantiene independientemente delos valores especificos deA, B, C y K mientras que el sistema sea estable (que se puede hacer a traves de la eleccionapropiada deK y ki).
El compensador final esta dado por:dedt
= z− r,
u =−kie−Kx+kr r,
donde hemos incluido la dinamica del integrador como parte de la especificacion del controlador. Este tipo de com-pensador es llamadocompensador dinamicopuesto que tiene su propia dinamica interna. El siguiente ejemplo ilustrael abordaje basico.
5.3.1. Ejemplo, control de rapidez con control integral
Considere el ejemplo de control de rapidez estudiado previamente.
MODELO LINEALIZADO CON INTEGRADOR
La dinamica linealizada de la planta en torno al punto de equilibrio ve, ue esta dada por:

78 5 Control por realimentacion de estados
Figura 5.12 Sistema de control por realimentacion de estados con aumento de la accion integral. Implementacion. El compensador finalposee el estadoe (la integral del error de salida), la entrada de estados del sistema x, la entrada de referenciar, la entrada de la salidacontrolada del proceso (planta)zy comanda la planta a traves de su salidau.
dxdt
= ax−bgθ +bw,
z= v = x+ve,,
dondex= v−ve, w= u−ue, mes la masa del carro yθ es elangulo de inclinacion del terreno. La constantea dependede las caracterısticas de aceleracion.
Si aumentamos el sistema con un integrador, la dinamica de la planta resulta:
dxdt
= ax−bgθ +bw,
dedt
= z−vr = ve+x−vr ,,
o, en la forma de espacio de estados:
ddt
[xe
]
=
[a 01 0
]
︸ ︷︷ ︸
A
[xe
]
+
[b0
]
︸︷︷︸
B
u+
[−bg
0
]
θ +
[0
ve−vr
]
.
Notese que cuando el sistema esta en equilibrio, tenemos ˙e= 0, que implica que la rapidez del vehıculov= ve+x debeser igual a la rapidez de la referencia deseadavr .
ANALISIS DEL SISTEMA
Controlabilidad:La matriz de controlabilidad es:
Wc =[
B AB]=
[b ab0 b
]
.
El determinante de la matriz es:det(Wc) = b2 6= 0,

5.3 Control integral 79
y concluimos que el sistema es controlable. Esto significa que podemos mover el sistema desde una condicion inicialhasta un estado final y, en particular, que siempre podemos encontrar una entrada que lleve el sistema desde unacondicion inicial hasta el punto de equilibrio.
Polos en lazo abierto:Los autovalores de la dinamica del sistema en lazo abierto estan dados porλ = 0,−a
DISENO DEL CONTROL
El controlador para el modelo linealizado con integrador tiene la forma: Nuestro controlador tendra la forma:
u =−[
kx ki]
︸ ︷︷ ︸
K
[xe
]
+krvr , ,
y las gananciaskx, ki y kr seran elegidos para estabilizar el sistema y proveer la entradacorrecta para la rapidez deseada.Polos en lazo cerrado:Asumamos que deseamos disenar el sistema en lazo cerrado para que tenga el siguiente polinomio caracterıstico:
αc(s) = s2+a1s+a2.
Estabilizacion por realimentacion de estados:Fijando el disturbioθ = 0, el polinomio caracterıstico del sistema en lazo cerrado esta dado por:
det(sI− (A−BK)) = det
(
s
[1 00 1
]
−[
a 01 0
][
kx ki])
= s2+(bkx−a)s+bki ,
entonces elegimos:
kx =a1+a
b, ki =
a2
b, kr =−1/(C(A−BK)−1B) =
ab
Controlador con integrador: Nuestro controlador tendra la forma:
dedt
= z−vr ,
u =−[
kx ki][
xe
]
+krvr ,.
SIMULACIONES
El controlador con integrador resultante estabiliza el sistema y como consecuencia lleva ˙e= z−vr a cero, resultandoen rastreamiento perfecto. Notese que aun teniendo un pequeno error en los valores de los parametros que definen elsistema, mientras los autovalores del sistema en lazo cerrado sean estables, el error de rastreamiento se aproximara acero. Luego, la calibracion exacta dekr ya no serıa necesaria. De hecho podriamos fijarkr = 0 y dejar que el controladorpor realimentacion haga su trabajo.
Control integral por realimentacion tambien se puede usar para compensar por disturbios constantes. La Fig. 5.12muestra el resultado de una simulacion en la que el carro encuentra una pendiente conanguloθ = 4o a lost = 8s. Laestabilidad del sistema no se ve afectada por este disturbioexterno, y una vez mas vemos que la rapidez del vehıculoconverge a la rapidez deseada. Esta habilidad de manejar disturbios constante es en general una propiedad de loscontroladores con realimentacion integral.
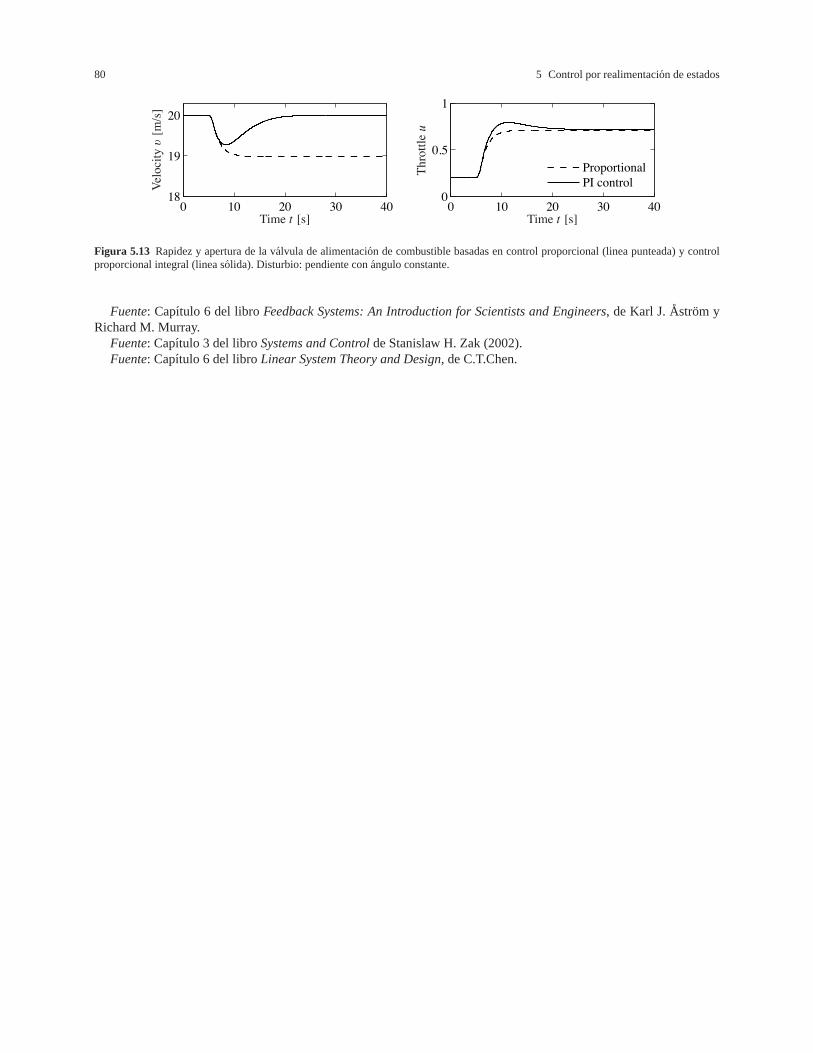
80 5 Control por realimentacion de estados
0 10 20 30 4018
19
20
0 10 20 30 400
0.5
1
Proportional
PI control
Time t [s]Time t [s]
Vel
oci
tyv
[m/s
]
Th
rott
leu
Figure 6.15:Velocity and throttle for a car with cruise control based on proportional (dashed)
and PI control (solid). The PI controller is able to adjust the throttle to compensate for theFigura 5.13 Rapidez y apertura de la valvula de alimentacion de combustible basadas en control proporcional (linea punteada) y controlproporcional integral (linea solida). Disturbio: pendiente conangulo constante.
Fuente: Capıtulo 6 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astrom yRichard M. Murray.
Fuente: Capıtulo 3 del libroSystems and Controlde Stanislaw H. Zak (2002).Fuente: Capıtulo 6 del libroLinear System Theory and Design, de C.T.Chen.

Capıtulo 6Control por realimentaci on de salidas
En esta parte mostramos como usar control por realimentacion de estados para modificar la dinamica del sistemaa traves de observadores. Introducimos el concepto de observabilidad y mostramos que si un sistema es observablees posible recuperar los estados en base a las medidas de las entradas y salidas del sistema. Luego mostramos comodisenar un controlador con realimentacion partiendo de los estados observados. Un concepto importante es el principiode separacion, que sera probado. La estructura del controlador que se deriva es bastante general y se puede obtener enotros metodos de diseno.
6.1. Observabilidad
Como hemos observado en las secciones anteriores, la controlabilidad del sistema implica la habilidad para con-trolar completamente el vector de estado. Supongamos ahoraque no podemos acceder a los estados del sistema o queconocer todos los estados del sistema requerirıa un numero excesivo de sensores, lo que es mas realista. En esta parteinvestigamos como podemos estimar los estados usando un modelo matematico y algunas medidas. Mostraremos queel calculo de los estados sera realizado por un sistema dinamico llamadoobservador.
Consideremos el sistema descrito por la ecuacion diferencial lineal:
x(t) = Ax(t)+Bu(t), x(0) = xo
y(t) =Cx(t)+Du(t),,
dondeC ∈ Rp×n, p≤ n, y D ∈ R
p×m. Nuestra intencion es conocer el comportamiento dinamico de todos los estadosa partir de sus entradas y salidas (senal medida), ver Fig. 6.1. La senal medida puede estar contaminada con ruidon, sin embargo comenzaremos analizando el caso sin ruido. Escribimos x para el estado estimado que resultado delobservador.
202 CHAPTER 7. OUTPUT FEEDBACK
u6
n
Observerx
Process
x = Ax + Bu
y = Cx + Du
y
Testing for Observability
Figura 6.1 Diagrama de bloques del observador. El observador usa las medidasdel procesoy (posiblemente contaminada con ruidon) ylas entradasu para estimar el estado actual del proceso.
Observabilidad Un sistema lineal esobservablesi existe un tiempo finitot f > to tal que para cualquieru(t) yresultantey(t) en el tiempo[to, t f ] podemos determinarx(t), to < t < t f , conociendo completamente la entradau y lasaliday. ⋄
81

82 6 Control por realimentacion de salidas
Notese que podemos decir que nuestro objetivo es determinarx(to) ya que una vezx(to) es obtenido,x(t) se puededeterminar conociendou(t) y y(t) en el intervalo de tiempo[to, t f ]. A continuacion mostraremos como podemos deter-minar constructivamentex(to), dadosu(t) y y(t). Primero notamos que la soluciony(t) esta dada por:
y(t) =CeA(t−to)x(to)+∫ t
toCeA(t−τ)Bu(τ)dτ +Du(t).
Definiendo:
g(t) =CeA(t−to)x(to) = y(t)−∫ t
toCeA(t−τ)Bu(τ)dτ−Du(t),
donde la parte derecha de la igualdad es conocida. Nuestro objetivo es determinarx(to). Teniendox(to), podemosdeterminar enteramentex(t) para todot ∈ [t f , to] de la formula:
x(t) = eA(t−to)x(to)+∫ t
toeA(t−τ)Bu(τ)dτ .
Premultiplicando ambos lados deg(t) por eAT (t−to)CT e integrando la expresion resultante entre los limitesto y t f ,obtenemos: ∫ t
toeAT (t−to)CTCeA(t−to)dtxo =
∫ t
toeAT (t−to)CTg(t)dt.
Sea
Vo(to, t f ) =
∫ t f
toeAT tCTCeAtdt.
Entonces, despues de algunas manipulaciones y asumiendo que la matrizVo(to, t f ) es invertible, obtenemos:
xo = eAtoV−1o (to, t f )e
AT to∫ t f
toeAT (t−to)CTg(t)dt.
El conocimiento dexo nos permitira reconstruir totalmente el estadox(t) sobre todo el intervalo[to, t f ]. Concluimosque si la matrizVo(to, t f ) es invertible, entonces el sistema es observable.
6.1.1. Ejemplo
Para un sistema dinamico modelado por:
x =
[−1/2 1/2−1/2 1/2
]
x+
[−11
]
u = Ax+bu,
y =[
1 1]x = cx,
determinaremosx(t) sobre el intervalo[0,10] sabiendo queu(t) = 1 parat ≥ 0 y y(t) = t2+2t parat ≥ 0.Primero calcularemosx(0). Tenemos queto = 0 y t f = 10. Entonces:
x(to) = x(0) = eAtoV−1o (to, t f )e
AT to∫ t f
toeAT (t−to)cTg(t)dt
=V−1o (0,10)
∫ 10
0eAT tcTg(t)dt,
donde:
g(t) = y(t)−c∫ 10
0eA(t−τ)bu(τ)dτ.
Para evaluar la expresion arriba, primero calcularemoseAt:

6.1 Observabilidad 83
eAt = L−1([sI2−A]−1) = L
−1([ 1
s− 12
1s2
12
1s2
−12
1s2
1s +
12
1s2
])
=
[1− 1
2t 12t
−12t 1+ 1
2t
]
.
Calculando:
Vo(0,10) =∫ 10
0eAT tcTceAtdt,
=∫ 10
0
([1− t1+ t
][
1− t 1+ t])
dt =∫ 10
0
[1−2t + t2 1− t2
1− t2 1+2t + t2
]
dt
=
[
t− t2+ t33 t− t3
3
t− t33 t + t2+ t3
3
]∣∣∣∣∣
10
0
=
[243,333 −323,333−323,333 443,333
]
.
La inversa deVo(0,10) es:
V−1o (0,10) =
[0,133 0,0970,097 0,073
]
.
Calculandog(t) obtenemos:
g(t) = y(t)−c∫ t
0eA(t−τ)bu(τ)dτ
= t2+2t−[
1 1]∫ t
0
[−1+ t− τ1+ t + τ
]
dτ = t2+2t−∫ t
0(2t−2τ)dτ
t2+2t−2t(τ)∣∣t0+ τ2
∣∣t0 = t2+2t− t2 = 2t.
Entonces:∫ 10
0eAT tcTg(t)dt =
∫ 10
0
[(1− t)2t(1+ t)2t
]
dt =
[t2− 2
3t3
t2+ 23t3
]∣∣∣∣
10
0
=
[−566,667766,667
]
.
Luego calculando la condicion inicialxo:
x(0) =V−1o (0,10)
∫ t
0eAT tctg(t)dt =
[−11
]
.
Conociendox(0), podemos encontrarx(t) parat ≥ 0,
x(0) = eAtx(0)+∫ t
0eA(t−τ)bu(τ)dτ .
=
[−1+ t1+ t
]
+
[
(−1+ t)t− t22
(1+ t)t− t22
]
=
[t22 −1
t22 +2t +1
]
6.1.2. Teorema
Las siguientes condiciones son equivalentes:
1. El sistema ˙x= Ax+Bu, y=Cx+Du es observable.2. La matrizVo(to, t f ) es no singular para todot f > to.3. Lasn columnas deCeAt son linealmente independientes para todot ∈ [0,∞) sobre los numeros reales.4. La matriz de observabilidadWo:

84 6 Control por realimentacion de salidas
Wo =
CCA...
CAn−1
∈ R
pn×n
es de rango completo (n).
5. rango
[sIn−A
C
]
= n, para todos= λ (A).
⋄Al igual que en el caso de controlabilidad, usando una transformacion de similaridad podemos separar la parte
observable de la no observable. Si los autovalores de la parte no observable son asintoticamente estables, entoncesdecimos que el sistema esdetectable.
Una vez definido el concepto de observabilidad, volveremos aresponder la pregunta de como construir un obser-vador para un sistema. Buscamos observadores que sean representados como sistemas lineales y tomen las entradasy salidas del sistema para producir un estimado de los estados del sistema. Esto es, deseamos contruir un sistemadinamico de la forma:
dxdt
= Fx+Gu+Hy,
dondeu y y son la entrada y salida del sistema original y ˆx ∈ Rn es un estimado del estado con la propiedad que
x(t)→ x(t) a medida quet→ ∞.
6.2. Observador de orden completo
Considerando el sistema lineal conD = 0 para simplificar la exposicion:
x(t) = Ax(t)+Bu(t), x(0) = xo
y(t) =Cx(t),,
dondeC∈Rp×n, p≤ n. Asumiendo que el sistema es observable. Nuestro objetivo es determinar un sistema dinamico
que estime el vector de estadosx basado en las entradasu y salidasy.A continuacion intentamos determinar los estados simplemente simulando las ecuaciones del sistema con las en-
tradasu, estimador en lazo abierto:dxdt
= Ax+Bu.
Para encontrar las propiedades del sistema, introducimos el error de estimacion:
x= x− x.
Entonces, la dinamica del error de estimacion esta descrito por:
˙x= x− ˙x= Ax,
con el error inicial de estimacion siendo:x(0) = x(0)− x(0).
Si los autovalores de la matrizA estan en el semiplano complejo izquierdo abierto, entoncesel error converge a cero.Sin embargo, no tenemos ningun control sobre la variacion de la convergencia o sobre el valor adonde convergen losestados reales y estimados (independientemente, los estadosx y x tambien convergen a cero). Por otro lado, la matrizA no necesariamente tendra sus autovalores en el semiplano complejo izquierdo abierto. Luego este estimador en lazoabierto no es practico ya que queremos que nuestra estimacion converja rapidamente a un estado diferente de cero paraasi poder usarlo en nuestro controlador, y esto independiente de las caracterısticas del sistema. Ahora analicemos elcaso incluyendo la saliday. Esteultimo caso se denominaestimador en lazo cerrado, el observador Luenbergero elestimador de orden completo asintotico.
La dinamica del estimador en lazo cerrado esta descrita por:

6.2 Observador de orden completo 85
dxdt
= Ax+Bu+L(y−Cx),
la realimentacion de la senal medida es proveida por el terminoL(y−Cx), que es proporcional a la diferencia entre lasalida observada y la salida estimada por el observador.
La dinamica del error de estimacion viene siendo gobernada por:
˙x = x− ˙x= (A−LC)x, x(0) = x(0)− x(0).
.
La matrizL puede ser elegida del tal forma queA− LC tenga sus autovalores con partes reales negativas, y comoconsecuencia, el error ˜x tienda a cero. La variacion de la convergencia es determinada por una seleccion apropiada deautovalores. Es importante destacar que las propiedades deconvergencia pueden ser disenadas para ser mas rapidascon relacion a la dinamica del sistema. Adicionalmente, esta version de observador trabaja aun en el caso de sistemasinestables.
Notese la similaridad entre los problemas de encontrar un realimentador de estados y encontrar un observador.Realimentacion de estados por ubicacion de polos es equivalente a encontrar una matrizK tal queA−BK tenga ciertosautovalores. Disenar un observador con autovalores prescritos es equivalente a encontrar una matrizL tal queA−LCtenga ciertos autovalores. Dado que los autovalores de una matriz y su transpuesta son los mismos podemos establecerlas siguientes equivalencias:
A ⇐⇒ AT , B ⇐⇒ CT , K ⇐⇒ LT , Wc ⇐⇒ WTo .
El problema de diseno del observador es eldualdel problema de diseno del realimentador de estados. Luego podemosvalernos de las herramientas aprendidas en la teorıa de realimentacion de estados. Ilustraremos esteultimo punto conun ejemplo.
6.2.1. Ejemplo
Dadas las matrices del siguiente sistema observable:
A=
0 0 1 01 0 2 00 1 3 00 0−21 5
, C=
[1 0 0 00 0 0 1
]
,
construir la matrizL ∈ R4×2 tal que los autovalores deA−LC estan localizados en:
−2,−3+ i,−3− i,−4.
En nuestra construccion de la matriz de gananciasL usamos la forma canonica observable del sistema mostrada enClase04-01. Nuestro objetivo es entonces contruir la matriz L tal que el polinomio caracterıstico de la matrizA−LCes:
det(sI4−A+LC) = s4+12s3+54s2+108s+80.
Usando la forma canonica observable del sistema, seleccionamosL tal que:
A− LC=
0 0 0 −801 0 0−1800 1 0 −540 0 1 −12
.
Luego tenemos que:

86 6 Control por realimentacion de salidas
L =
1681 802270 1081137 54251 17
,
finalmente:
L = TT L =
1137 543955 1885681 270−23626−1117
.
6.2.2. Control usando estados estimados
En esta seccion consideraremos laplanta representado por el sistema espacio de estados de la forma:
ddt
x(t) = Ax(t)+Bu(t), x(0) = xo
y(t) =Cx(t),. (6.1)
Notese que hemos asumido que no hay termino directo en el sistema (D= 0). A menudo esta es una suposicion realista.En esta parte nuestra intencion es disenar un controlador por realimentacion de estados para el caso donde solo la
salida es medida. Ademas asumimos que el sistema es controlable y observable. En elcapıtulo anterior encontramosuna realimentacion de la forma:
u=−Kx+kr r,
para el caso en que todos los estados eran medidos, y en la seccion anterior desarrollamos un observador que generaestimados del estado ˆx basado en entradas y salidas. En esta parte combinaremos ambas ideas para encontrar unarealimentacion que dote de autovalores deseados al sistema en lazo cerrado para el caso de sistemas donde solo salidasson disponibles para realimentacion.
Si todos los estados no se pueden medir, parece razonable intentar la siguienterealimentacion:
u=−Kx+kr r, (6.2)
donde ˆx es la salida delobservadorde estados, en otras palabras:
dxdt
= Ax+Bu+L(y−Cx). (6.3)
Dado que el sistema (6.1) y el observador (6.3) son ambos de dimension n, el sistema en lazo cerrado es de dimension2n con los estados(x, x). La evolucion de los estados esta descrita por (6.1)-(6.3). Para analizar el sistema en lazocerrado la variable de estado ˆx es reemplazada por:
x= x− x. (6.4)
Sustrayendo (6.3) de (6.1) resulta:
˙x = x− ˙x= Ax−Ax−L(Cx−Cx) = Ax−LCx= (A−LC)x.
.
Retornando a la dinamica del sistema, introduciendou de (6.2) en (6.1) y usando (6.4) para eliminar ˆx resulta:
dxdt
= Ax+Bu= Ax−BKx+Bkr r = Ax−BK(x− x)+BKr r
= (A−BK)x+BKx+Bkr r.(6.5)
El sistema en lazo cerrado es entonces gobernado por:

6.2 Observador de orden completo 87
ddt
[xx
]
=
[A−BK BK
0 A−LC
][xx
]
+
[Bkr
0
]
r,
y =[C 0
][
xx
]
.(6.6)
Notese que el estado ˜x, que representa el error del observador, no se ve afectado por la senal de referenciar. Esto esdeseable dado que no queremos que la senal de referencia genere errores en el observador.
Con la dinamica del sistema siendo diagonal por bloques, encontramosque el polinomio caracterıstico del sistemaen lazo cerrado es:
αc(s) = det(sI−A+BK)det(sI−A+LC),
lo que significa que el diseno de la ley de control es separado de la construccion del estimador. Esto es lo que conocemoscomo elprincipio de separacion. El resultado es resumido a continuacion.
Teorema: (Ubicacion de polos por realimentacion de salidas).Considere el sistema:
ddt
x(t) = Ax(t)+Bu(t), x(0) = xo
y(t) =Cx(t).
El controlador descrito por:dxdt
= Ax+Bu+L(y−Cx) = (A−BK−LC)x+Ly,
u =−Kx+kr r,
da un sistema en lazo cerrado con el polinomio caracterıstico:
αc(s) = det(sI−A+BK)det(sI−A+LC).
Este polinomio puede tener sus raıces arbitrariamente asignadas si el sistema es controlable y observable. ⋄El controlador tiene un atractivo especial: puede ser considerado como compuesto por dos partes, one la reali-
mentacion de estados y la otra el observador. La ganancia de realimentacion K puede ser calculada como si todos losestados pudiesen ser medidos, y solo depende deA y B. La ganancia del observadorL depende solo deA y C. Lapropiedad de que la ubicacion de autovalores para sistemas con realimentacion de salidas puede ser separada en laubicacion de autovalores una realimentacion de estados y un observador es llamada principio de separacion.
Un diagrama de bloques del controlador es mostrado en la Fig.6.2. Notese que el controlador contiene un modelodinamico de la planta. Esto se conoce comoprincipio del modelo interno; el controlador posee un modelo de la plantaque debe ser controlada.
La funcion de transferencia del sistema en lazo cerrado relacionando Y(s) y R(s), para condiciones iniciales cero,es:
Y(s) =[C 0
][
sI−A+BK −BK0 sI−A+LC
]−1[B0
]
krR(s)
=C(s−A+BK)−1BkrR(s).
La expresion arriba es identica a la del sistema en lazo cerrado si aplicaramos la ley de control por realimentacionde estadosu = −Kx+Kr r. Entonces, el compensador combinado estimador-observador genera la misma funcion detransferencia en lazo cerrado que la ley de control por realimentacion de estados.
6.2.2.1. Seleccion de polos del estimador
Algunos autores recomiendan que la parte real de los polos del estimador -esto es, la parte real de los autovalores dela matrizA−LC - esten de 2 a 6 veces mas hacia la izquierda en el semiplano complejo izquierdo quela parte real delos polos del controlador, que son los autovalores de la matriz A−BK. Tal eleccion asegura un decaimiento rapido delerror de estimacion x= x− x comparado con la dinamica deseada del controlador. Esto, a su vez, hace que los polosdel controlador dominen la respuesta del sistema en lazo cerrado. Dado que los polos del estimador representan unamedida de la rapidez con la que el error ˜x= x− x decae a cero, uno debe tender a asignar los polos del estimador bienhacia adentro del semiplano complejo izquierdo. Sin embargo, decaimiento rapido requiere de largas ganancias que
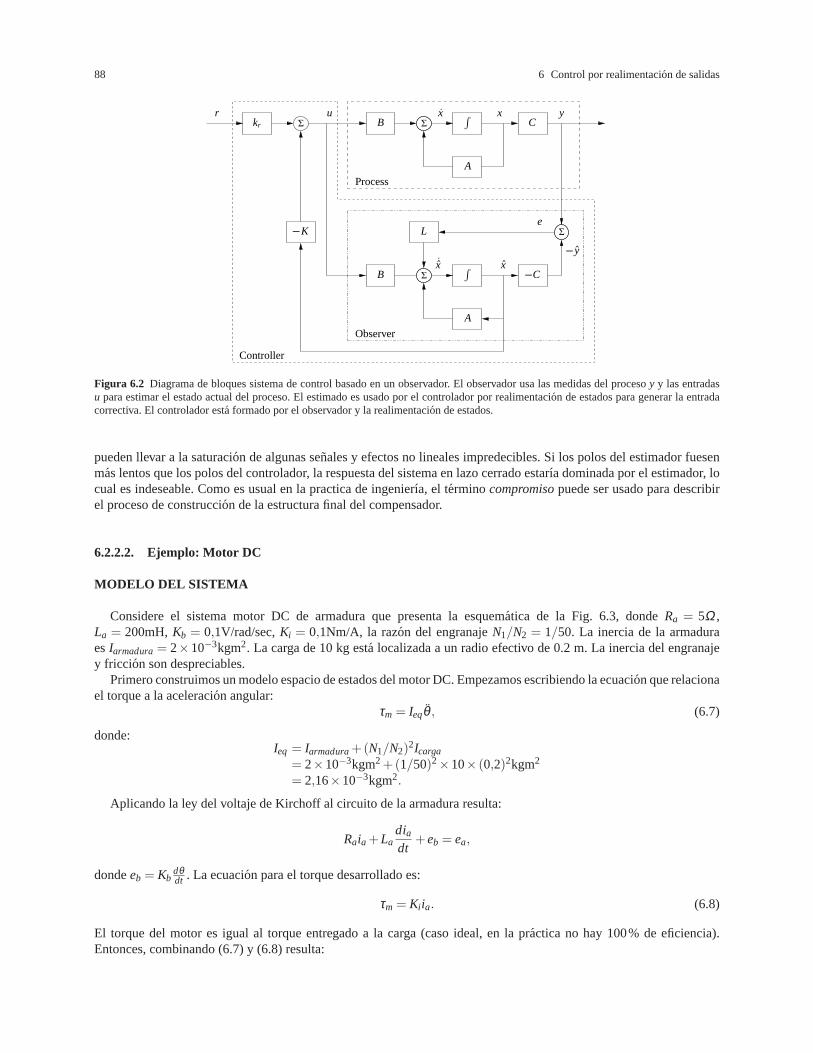
88 6 Control por realimentacion de salidas7.3. CONTROL USING ESTIMATED STATE 213
−y
6
x
6
6
6
y
Process
Observer
x
B
A
∫C
L
B∫
−C
A
Controller
ukr
−K
r
e
x
˙x
Figura 6.2 Diagrama de bloques sistema de control basado en un observador. El observador usa las medidas del procesoy y las entradasu para estimar el estado actual del proceso. El estimado es usado por elcontrolador por realimentacion de estados para generar la entradacorrectiva. El controlador esta formado por el observador y la realimentacion de estados.
pueden llevar a la saturacion de algunas senales y efectos no lineales impredecibles. Si los polos del estimador fuesenmas lentos que los polos del controlador, la respuesta del sistema en lazo cerrado estarıa dominada por el estimador, locual es indeseable. Como es usual en la practica de ingenierıa, el terminocompromisopuede ser usado para describirel proceso de construccion de la estructura final del compensador.
6.2.2.2. Ejemplo: Motor DC
MODELO DEL SISTEMA
Considere el sistema motor DC de armadura que presenta la esquematica de la Fig. 6.3, dondeRa = 5Ω ,La = 200mH,Kb = 0,1V/rad/sec,Ki = 0,1Nm/A, la razon del engranajeN1/N2 = 1/50. La inercia de la armaduraesIarmadura= 2×10−3kgm2. La carga de 10 kg esta localizada a un radio efectivo de 0.2 m. La inercia del engranajey friccion son despreciables.
Primero construimos un modelo espacio de estados del motor DC. Empezamos escribiendo la ecuacion que relacionael torque a la aceleracion angular:
τm = Ieqθ , (6.7)
donde:Ieq = Iarmadura+(N1/N2)
2Icarga
= 2×10−3kgm2+(1/50)2×10× (0,2)2kgm2
= 2,16×10−3kgm2.
Aplicando la ley del voltaje de Kirchoff al circuito de la armadura resulta:
Raia+Ladiadt
+eb = ea,
dondeeb = Kbdθdt . La ecuacion para el torque desarrollado es:
τm = Ki ia. (6.8)
El torque del motor es igual al torque entregado a la carga (caso ideal, en la practica no hay 100% de eficiencia).Entonces, combinando (6.7) y (6.8) resulta:

6.2 Observador de orden completo 89
θ =Ki
Ieqia
Ra
Il
if constant
La
Gear
Output
Potentiometer
ea
eb
ia
l
Figure 3.8Figura 6.3 Modelo de un motor DC de armadura.
Seax1 = ia, x2 = θ , x3 = θ = ω, u= ea, y y= θl . Luego tomando en cuenta la definicion de las variables de estado,representamos la ecuaciones del modelo en la forma de espacio de estados:
x1
x2
x3
=
−RaLa
0 −KbLa
0 0 1KiIeq
0 0
x1
x2
x3
+
1La
00
u
y =[
0 N1N2
0]
x1
x2
x3
.
Sustituyendo los parametros del sistema dados, obtenemos de la ecuacion mostrada arriba:
x1
x2
x3
=
−25 0−0,50 0 1
46,296 0 0
x1
x2
x3
+
500
u= Ax+bu
y =[
0 0,02 0]
x1
x2
x3
= cx.
ANALISIS DEL SISTEMA
Polos en lazo abierto
Los autovalores de la dinamica del sistema en lazo abierto estan dados por:
0,−24,0307,−0,9630
Controlabilidad
La matriz de controlabilidad es:
Wc =[
b Ab A2b]=
5 −125 3009,30 0 231,50 231,5 −5787
.
El determinante de la matriz es det(Wc) 6= 0, y concluimos que el sistema es controlable.

90 6 Control por realimentacion de salidas
Observabilidad
La matriz de observabilidad, usando el sistema dual ˙w= ATw+cTn es:
WTo =
[cT ATcT (AT)2CT
]=
0 0 0,92590,02 0 0
0 0,02 0
.
El determinante de la matriz es det(WTo ) 6= 0, y concluimos que el sistema es observable.
6.2.2.3. DISENO DEL CONTROL POR REALIMENTACI ON DE ESTADOS
Polos deseados
Nuestro siguiente paso es disenar el controlador por realimentacion de estadosu=−Kx+Kr r, tal que los autoval-ores deA−bK son:
−1+ i,−1− i,−10.El polinomio caracterıstico del sistema en lazo cerrado es:
αc(s) = (s+1− i)(s+1+ i)(s+10) = s3+12s2+22s+20.
Ganancia de realimentacion K
Para ubicar los polos en las posiciones deseadas, primero transformamos el sistema en la forma canonica controlable.La ultima fila de la matriz de controlabilidad es:
q1 =[
0 0,0043 0],
y entonces la matriz de transformacion que buscamos tiene la forma:
T =
q1
q1Aq1A2
=
0 0,0043 00 0 0,0043
0,2 0 0
.
El sistema de matrices en las nuevas coordenadas es:
A= TAT−1 =
0 1 00 0 10 −23,15−25
,
b= Tb=
001
,
y,c= cT−1 =
[4,63 0 0
].
Ahora encontramosK tal que:
A− bc=
0 1 00 0 1−20−22−12
.
Luego tenemos:K =
[20−1,148−13
],
y,
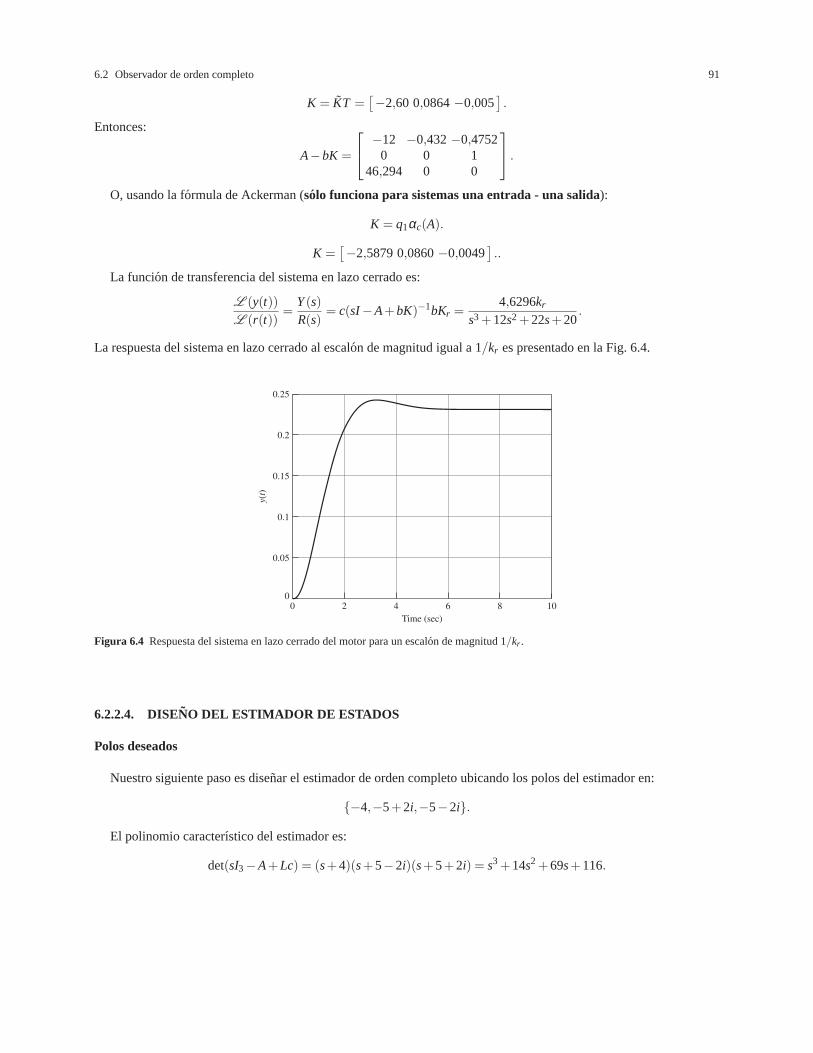
6.2 Observador de orden completo 91
K = KT =[−2,60 0,0864−0,005
].
Entonces:
A−bK =
−12 −0,432−0,47520 0 1
46,294 0 0
.
O, usando la formula de Ackerman (solo funciona para sistemas una entrada - una salida):
K = q1αc(A).
K =[−2,5879 0,0860−0,0049
]..
La funcion de transferencia del sistema en lazo cerrado es:
L (y(t))L (r(t))
=Y(s)R(s)
= c(sI−A+bK)−1bKr =4,6296kr
s3+12s2+22s+20.
La respuesta del sistema en lazo cerrado al escalon de magnitud igual a 1/kr es presentado en la Fig. 6.4.
0.25
0.2
0.15
0.1
0.05
00 2 4
Time (sec)
y(t)
6 8 10
Figura 6.4 Respuesta del sistema en lazo cerrado del motor para un escalon de magnitud 1/kr .
6.2.2.4. DISENO DEL ESTIMADOR DE ESTADOS
Polos deseados
Nuestro siguiente paso es disenar el estimador de orden completo ubicando los polos del estimador en:
−4,−5+2i,−5−2i.
El polinomio caracterıstico del estimador es:
det(sI3−A+Lc) = (s+4)(s+5−2i)(s+5+2i) = s3+14s2+69s+116.

92 6 Control por realimentacion de salidas
Ganancia de estimadorL
Para ubicar los polos en las posiciones deseadas, primero transformamos el sistema a la forma canonica observable.O, equivalentemente al sistema dual ˙w= ATw+cTn a su forma canonica controlable.
La ultima fila de la inversa deWTo , q1 es:
q1 =[
1,0800 0 0].
La matriz de transformacion que lleva al sistema a su forma canonica controlable es:
T =
q1
q1AT
q1(AT)2
=
1,1 0 0−27 0 50650 50−1250
.
Las matricesA y c en las nuevas coordenadas son:
AT = TAT T−1 =
0 1 00 0 10 −23,1481−25
y cT = cT T−1 =
001
.
Ahora encontramosLT tal que:
AT − cT LT =
0 1 00 0 1−116−69−14
.
Luego tenemos:LT =
[116 45,8519−11
],
y como consecuencia:LT = LT T =
[−8263−550 16042
]
o,
L =
−8263−55016042
.
La dinamica del estimador de estados de orden completo es descritapor:
˙x= (A−Lc)x+bu+Ly,
esto es:
˙x=
−25 165,2544 −0,50 11 1
46,2963−320,8519 0
x+
500
u+
−8263−55016042
y.
Conectamos el estimador de orden completo del motor DC, junto con la realimentacion de estados, entoncesobtenemos el sistema en lazo cerrado con el compensador controlador-estimador-orden-completo combinado. La Fig.6.5 muestra la grafica dex1 y su estimado para el sistema en lazo cerrado con estimador enel lazo, donder = 0,x(0) =
[1 2−0,1
]T, y x(0) = 0.
El diseno del estimador de orden reducido sera presentado junto conla teorıa de estimadores de orden reducido.Siguiendo con la respuesta a la pregunta de como construir unobservador para un sistema, al igual que en el caso del
observador de orden completo, consideraremos observadores que sean representados como sistemas lineales y tomenlas entradas y salidas del sistema para producir un estimadode los estados del sistema. La diferencia con respecto alobservador anterior radica en que se aprovechara el hecho de que ciertos estados se pueden definir directamente usandola salida del sistema, y asi, el observador solo debe concentrarse en estimar los estados no conocidos.

6.3 Observador de orden reducido 93
3
70
6
5
4
3
2
1
0
1
2
Time (sec)
32.521.510.5
x1
x1 estimate
Figure 3.10Figura 6.5 Grafica dex1 y su estimado versus el tiempo para el sistema en lazo cerrado con un estimador de orden completo en el lazo.
6.3. Observador de orden reducido
Considerando el sistema linealn− dimensional conD = 0 para simplificar la exposicion:
x(t) = Ax(t)+Bu(t), x(0) = xo
y(t) =Cx(t), (6.9)
dondeA, B, C son, respectivamente, matrices reales constantesn×n, n× p y q×n (q≤ n). Asumiendo que el sistemaes observable. Nuestro objetivo es determinar un sistema dinamico que estime el vector de estadosx basado en lasentradasu y salidasy.
Asumiendo queC tiene rango de columna completa, esto es rangoC= q. Definir
P=
[CR
]
, (6.10)
dondeR es una matriz real constante(n− q)× n y es enteramente arbitraria siempre y cuandoP sea no singular.Calculando la inversa deP como
Q= P−1 =[
Q1... Q2
]
, (6.11)
dondeQ1 y Q2 son matricesn×q y n× (n−q). Claramente se tiene que
In = PQ=
[CR
][
Q1 Q2]=
[CQ1 CQ2
RQ1 RQ2
]
=
[Iq 00 In−q
]
. (6.12)
Ahora transformaremos (6.9) usando ¯x= Px,
˙x = PAP−1x+PBuy =CP−1x=CQ=
[Iq 0
]x,
que puede ser particionado como,[
˙x1˙x2
]
=
[A11 A12
A21 A22
][x1
x2
]
+
[B1
B2
]
u,
y =[
Iq 0]x= x1
, (6.13)
donde ¯x1 consiste en los primerosq elementos de ¯x y x2 es lo que queda de ¯x; A11, A12, A21 y A22 son, respectivamente,matricesq×q, q× (n−q), (n−q)×q y (n−q)× (n−q); B1 y B2 son particionadas apropiadamente. De (6.13) vemosquey = x1. Entonces solo necesitaremos estimar losn− q elementos de ¯x. Consecuentemente solo necesitamos un

94 6 Control por realimentacion de salidas
estimador de estados de dimension n−q en lugar de un estimador de estados de dimension n que presentamos en laclase anterior.
Usando ¯x1 = y, reescribimos (6.13) como
y = A11y+ A12x2+ B1u,˙x2 = A21y+ A22x2+ B2u,
(6.14)
y de forma mas sucinta aun usandou= A21y+ B2u,
w= y− A11y− B1u,
que son funciones de senales conocidasy y u, luego (6.14) se pueden reescribir como,
SINTESIS:˙x2 = A22x2+ u,w = A12x2.
(6.15)
Notese que si la ecuacion dinamica en (6.15) es observable, se puede construir un estimador dex2.TeoremaEl sistema ˙x=Ax+Bu, y=Cxen (6.9) es observable o, equivalentemente, el sistema˙x= Ax+Bu, y= Cx
en (6.13) es observable si y solo si el sistema˙x2 = A22x2+ u, w= A12x2 en (6.15) es observable.Asimismo, se puede probar la controlabilidad de los sistemas involucrados arriba.Luego,x= Ax+Bu, y=Cx es observable, entonces˙x2 = A22x2+ u, w= A12x2 es observable. Consecuentemente,
existe un estimador de estados de ¯x2 de dimensionn−q de la forma
˙x2 = (A22− LA12) ˆx2+ Lw+ u, (6.16)
tal que los autovalores de (A22− LA12) pueden ser arbitrariamente asignados mediante una eleccion apropiada deL. Lasustitucion deu y w en (6.16) resulta en
˙x2 = (A22− LA12) ˆx2+ L(y− A11y− B1u)+ A21y+ B2u. (6.17)
Esta ecuacion contiene la derivada dey. Esta derivada se puede eliminar definiendo
z= ˆx2− Ly. (6.18)
Luego (6.18) resulta
IMPLEMENTACION:z= (A22− LA12)(z+ Ly)+(A21− LA11)y+(B2− LB1)u
= (A22− LA12)z+[(A22− LA12)L+(A21− LA11)]y+(B2− LB1)u(6.19)
Esta es una ecuacion dinamica de dimension n−q cony y u como entradas que se puede construir facilmente usando,por ejemplo, con circuitos de ampificadores operacionales.De (6.18) vemos quez+ Ly es un estimado de ¯x2. De hecho,si definimose= x2− (z+ Ly), luego tenemos
e= ˙x2− (z+ L ˙x1) = A21x1+ A22x2+ B2u− (A22− LA12)(z+ Lx1)−(A21− LA11)x1− (B2− LB1)u− LA11x1− LA12x2− LB1u= (A22− LA12)(x2−z− Lx1)
e= (A22− LA12)e.
(6.20)
Dado que los autovalores de(A22− LA12) pueden ser arbitrariamente asignados, la razon con la quee(t) se aproximaa cero o, equivalentemente, la razon con la que(z+ Ly) se aproxima a ¯x2 se puede determinar por el disenador. Luegoz+ Ly provee un estimado de ¯x2.
Combinando ¯x1 = y= ˆx1 con ˆx2 = z+ Ly para formar

6.3 Observador de orden reducido 95
ˆx=
[ˆx1ˆx2
]
=
[y
Ly+z
]
Dado que ¯x= Px, tenemosx= P−1x= Qx, o
x= Q ˆx=[
Q1 Q2][
yLy+z
]
=[
Q1 Q2][
Iq 0L In−q
][yz
]
(6.21)
Esta expresion provee un estimado del vector de estadosn−dimensional originalx.Una comparacion entre los estimadores de estado de ordenn−q y n esta dada en funcion del orden. El observador
de orden reducido requiere de la transformacion presentada en (6.10). Excluyendo este paso, la computacion requeridaen el caso del observador de orden reducido es claramente menor en comparacion al observador de orden completo.En la implementacion, el observador de orden reducido tambien requiere de un menor numero de integradores. En elcaso del observador de orden reducido, la senal y es realimentada atraves de la matriz constanteQ1 hacia la salidadel estimador. Entonces, siy es contaminada con ruido, estos ruidos apareceran a la salida del estimador. En el casodel observador de orden completo, la senal y es integrada o filtrada; de ahi que ruidos de alta frecuencia en y seransuprimidos con un observador de orden completo.
6.3.1. Compensador controlador/estimador orden-reducido
Se puede probar que el principio de Separacion tambien se cumple en el caso del estimador de orden reducido.COMPLETAR...
6.3.2. Ejemplo: Motor DC
Usando el modelo del motor DC, como descrito a continuacion
x1
x2
x3
=
−25 0−0,50 0 1
46,296 0 0
x1
x2
x3
+
500
u= Ax+bu
y =[
0 0,02 0]
x1
x2
x3
= cx,
en esta parte nos centraremos en el diseno de un estimador de orden reducido. Escogiendo los polos del estimador deorden reducido en−5+2i,−5−2i.
Definiendo la matriz de transformacionP a continuacion:
P=
0 0,02 01 0 00 0 1
,
luegoQ= P−1 queda definida como
P=
0 1 050 0 00 0 1
,
y el sistema transformado resulta,

96 6 Control por realimentacion de salidas
[˙x1˙x2
]
=
0 0 0,020 −25 −0,50 46,296 0
[x1
x2
]
+
050
u,
y =[
1 0 0]x= x1
.
La sıntesis del estimador se hace en base al siguiente sistema:
˙x2 =
[−25 −0,5
46,296 0
]
x2+ u,
w =[
0 0,02]x2
.
El polinomio caracterıstico del estimador de orden reducido es:
det(sI2− A22+ LA12) = (s+5−2i)(s+5+2i) = s2+10s+29.
SeaL =
[l1l2
]
, entonces la siguiente ecuacion debe ser satisfecha:
∣∣∣∣s
[1 00 1
]
−[−25 −0,5
46,296 0
]
+
[l1l2
][
0 0,02]∣∣∣∣=
∣∣∣∣
[s+25 0,02l1+0,5−46,296 s+0,02l2
]∣∣∣∣= s2+10s+29.
s2+(25+0,02l2)s+46,296(0,02l1+0,5)+25(0,02l2) = s2+10s+29.
Finalmente, se obtiene que:L =
[411,3228−750
]
La dinamica del estimador de estados de orden reducido es descritapor:
z= (A22− LA12)z+[(A22− LA12)L+(A21− LA11)]y+(B2− LB1)u,
x =[
Q1 Q2][
Iq 0L In−q
][yz
]
esto es:
z=
[−25 −8,7265
46,296 15
]
z+
[50
]
u+
[−3738,27792,6
]
y,
x =
1 00 00 1
z+
411,322850−750
y
Si conectamos el estimador de orden reducido del motor DC, junto con la realimentacion de estados antes calculada,entonces obtenemos el sistema en lazo cerrado con el compensador controlador-estimador-orden-reducido combinado.La Fig. 6.6 muestra la grafica dex1 y su estimado para el sistema en lazo cerrado con estimador enel lazo, donder = 0,x(0) =
[1 0,2 −0,1
]T, y z(0) = 0.
Fuente: Capıtulo 3 del libroSystems and Controlde Stanislaw H. Zak (2002).Fuente: Capıtulo 7 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astrom y
Richard M. Murray.

6.3 Observador de orden reducido 97
10
5
0
10
5
15
20
250 2 4
Time (sec)
6 8 10
x1
x1 estimate
Figura 6.6 Graficas dex1 y su estimado versus tiempo para el sistema no lineal en lazo cerrado con estimador de orden reducido en el lazo.

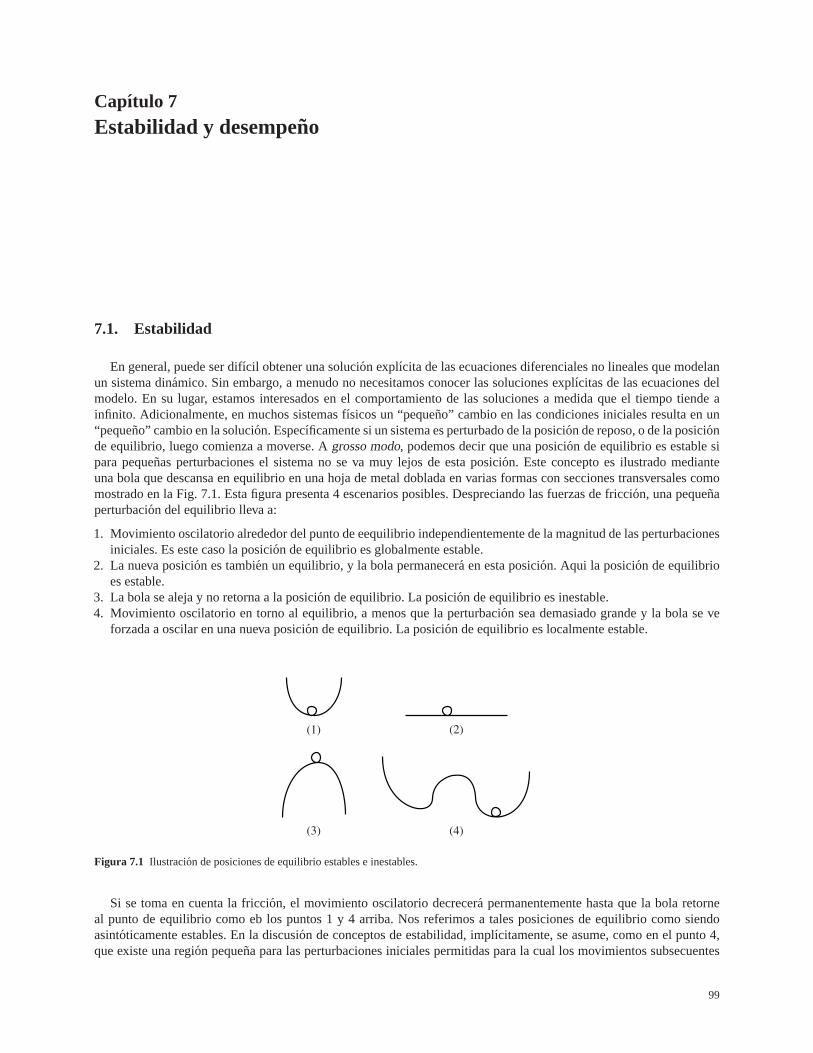
Capıtulo 7Estabilidad y desempeno
7.1. Estabilidad
En general, puede ser difıcil obtener una solucion explıcita de las ecuaciones diferenciales no lineales que modelanun sistema dinamico. Sin embargo, a menudo no necesitamos conocer las soluciones explıcitas de las ecuaciones delmodelo. En su lugar, estamos interesados en el comportamiento de las soluciones a medida que el tiempo tiende ainfinito. Adicionalmente, en muchos sistemas fısicos un “pequeno” cambio en las condiciones iniciales resulta en un“pequeno” cambio en la solucion. Especıficamente si un sistema es perturbado de la posicion de reposo, o de la posicionde equilibrio, luego comienza a moverse. Agrosso modo, podemos decir que una posicion de equilibrio es estable sipara pequenas perturbaciones el sistema no se va muy lejos de esta posicion. Este concepto es ilustrado medianteuna bola que descansa en equilibrio en una hoja de metal doblada en varias formas con secciones transversales comomostrado en la Fig. 7.1. Esta figura presenta 4 escenarios posibles. Despreciando las fuerzas de friccion, una pequenaperturbacion del equilibrio lleva a:
1. Movimiento oscilatorio alrededor del punto de eequilibrio independientemente de la magnitud de las perturbacionesiniciales. Es este caso la posicion de equilibrio es globalmente estable.
2. La nueva posicion es tambien un equilibrio, y la bola permanecera en esta posicion. Aqui la posicion de equilibrioes estable.
3. La bola se aleja y no retorna a la posicion de equilibrio. La posicion de equilibrio es inestable.4. Movimiento oscilatorio en torno al equilibrio, a menos que la perturbacion sea demasiado grande y la bola se ve
forzada a oscilar en una nueva posicion de equilibrio. La posicion de equilibrio es localmente estable.
(1) (2)
(3) (4)
Figura 7.1 Ilustracion de posiciones de equilibrio estables e inestables.
Si se toma en cuenta la friccion, el movimiento oscilatorio decrecera permanentemente hasta que la bola retorneal punto de equilibrio como eb los puntos 1 y 4 arriba. Nos referimos a tales posiciones de equilibrio como siendoasintoticamente estables. En la discusion de conceptos de estabilidad, implıcitamente, se asume, como en el punto 4,que existe una region pequena para las perturbaciones iniciales permitidas para la cual los movimientos subsecuentes
99

100 7 Estabilidad y desempeno
convergen a la posicion de equilibrio. Sin embargo, si, como en el punto 1, cualquier perturbacion inicial conlleva a unmovimiento que converge a la posicion de equilibrio, entonces tenemos estabilidad asintotica global, que tambien serefiere como estabilidad asintotica en la grande.
7.1.1. Definiciones basicas de estabilidad
Consideramos una clase de sistemas dinamicos modelados por la ecuacion:
x(t) = f (t,x(t)), x(to) = xo, (7.1)
dondex∈ Rn es el vector de estados yf : R×R
n→ Rn es una funcion vectorial con los componentes:
fi(t,x1,x2, ...,xn) : R×Rn→ R, i = 1,2, ...,n.
Asumiendo que losfi ’s son contınuos y que tienen derivadas parciales de primer orden contınuas. Bajo estas suposi-ciones , la solucion dex(t) = f (t,x(t)), x(to) = xo, existe y esunica. Denotamos la solucion comox(t) = x(t; to,xo). Silos fi ’s no dependen explıcitamente det, luego el sistema es representado como ˙x(t) = f (t,x(t)) = f (x(t)) y es llamadoautonomo; de otra forma es llamadono autonomo. Un punto de equilibrioo estado es un vector constante, digamosxe,tal que:
f (t,xe) = 0, para todot.
Observese que un estado de equilibrioxe es una solucion constante de (7.1).Si xe es un punto de equilibrio, siempre se puede transferir este punto de equilibrio al origen deRn mediante la
definicion de la siguiente variable:x= x−xe.
Asumamos que esto ya ha sido hecho para un punto de equilibrioen consideracion. Entonces, tenemos:
f (t,0) = 0 para todot.
A continuacion introducimos definiciones basicas de estabilidad segun Lyapunov (1857-1918). En las siguientesconsideraciones usaremos la norma Euclidiana estandar de un vector. Entonces, six∈ R
n, luego:
‖x‖= ‖x‖2 = (xTx)1/2.
Definicion 1.Se dice que un estado de equilibrioxe esestablesi para cualquierto dado y cualquier escalar positivoε, existe un escalar positivoδ = δ (to,ε) tal que si‖x(to)−xe‖< δ , luego‖x(t; to,xo)−xe‖< ε para todot ≥ to.
Friedland (ver referencias al final) realiza el siguiente comentario sobre la definicion de estabilidad: “Si esta defini-cion ‘epsilonica’ los deja frios, piensen en una competencia entre Ud, el disenador del sistema, y un adversario (nat-uraleza?). El adversario escoge una region en el espacio de estados de radioε y lo desafia a encontrar otra region, deradioδ , tal que si el estado inicial comienza dentro de tu region, luego permanecera dentro de la region escogida porel adversario. Si Ud puede hacerlo, el sistema es estable.”
Definicion 2. Un estado de equilibrioxe se dice queconvergente, o atrayente, si para cualquierto dado existe unescalar positivoδ1 = δ1(to) tal que si‖x(to)−xe‖< δ1, entonces
lımt→∞
x(t; to,xo) = xe.
Reescribiremos la Definicion 2 como sigue. Un estado de equilibrioxe es convergente si para cualquierto existe unescalar positivoδ1 = δ1(to) tal que si‖x(to)−xe‖< δ1, entonces para cualquierε1 > 0 dado existeT = T(ε1, to,xo) talque‖x(t; to,xo)−xe‖< ε1 para todot > to+T.
Definicion 3.Un estado de equilibrioxe esasintoticamente establesi es estable y convergente.Definicion 4. Un estado de equilibrioxe se dice que esuniformemente establesi el escalar positivoδ = δ (to,ε)
introducido en la Definicion 1 puede ser tomado independientemente del tiempo inicialto.
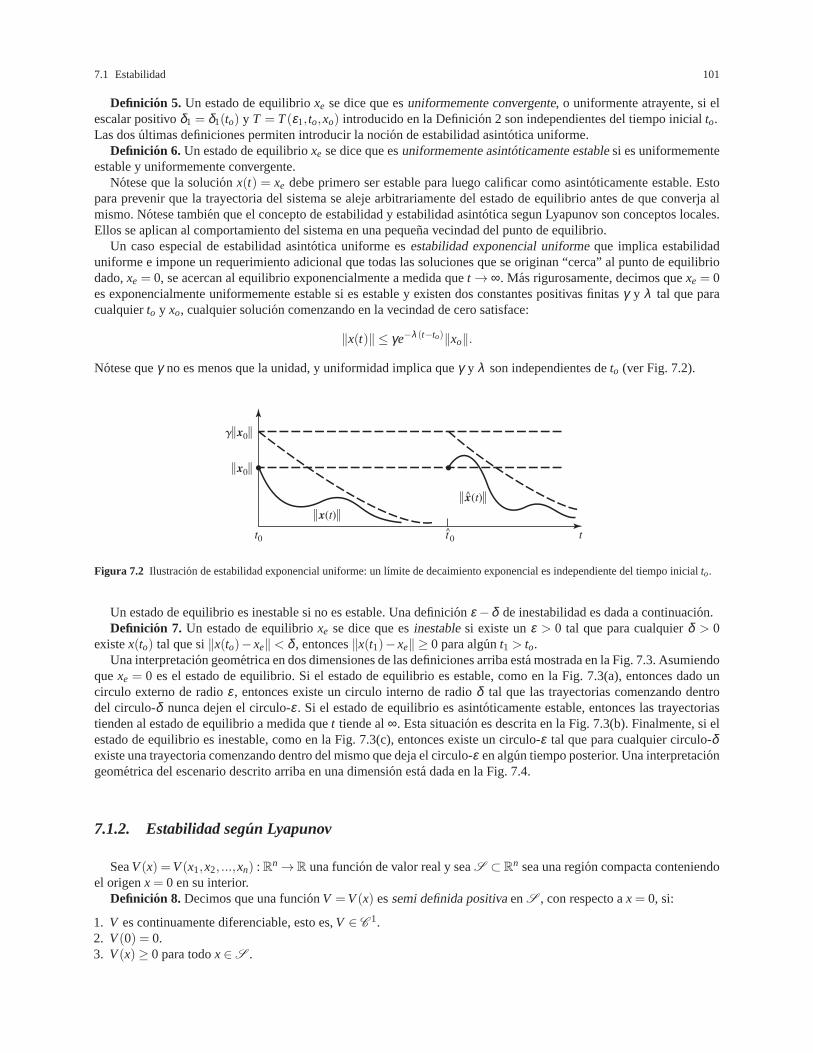
7.1 Estabilidad 101
Definicion 5. Un estado de equilibrioxe se dice que esuniformemente convergente, o uniformente atrayente, si elescalar positivoδ1 = δ1(to) y T = T(ε1, to,xo) introducido en la Definicion 2 son independientes del tiempo inicialto.Las dosultimas definiciones permiten introducir la nocion de estabilidad asintotica uniforme.
Definicion 6.Un estado de equilibrioxe se dice que esuniformemente asintoticamente establesi es uniformementeestable y uniformemente convergente.
Notese que la solucion x(t) = xe debe primero ser estable para luego calificar como asintoticamente estable. Estopara prevenir que la trayectoria del sistema se aleje arbitrariamente del estado de equilibrio antes de que converja almismo. Notese tambien que el concepto de estabilidad y estabilidad asintotica segun Lyapunov son conceptos locales.Ellos se aplican al comportamiento del sistema en una pequena vecindad del punto de equilibrio.
Un caso especial de estabilidad asintotica uniforme esestabilidad exponencial uniformeque implica estabilidaduniforme e impone un requerimiento adicional que todas las soluciones que se originan “cerca” al punto de equilibriodado,xe = 0, se acercan al equilibrio exponencialmente a medida quet→ ∞. Mas rigurosamente, decimos quexe = 0es exponencialmente uniformemente estable si es estable y existen dos constantes positivas finitasγ y λ tal que paracualquierto y xo, cualquier solucion comenzando en la vecindad de cero satisface:
‖x(t)‖ ≤ γe−λ (t−to)‖xo‖.
Notese queγ no es menos que la unidad, y uniformidad implica queγ y λ son independientes deto (ver Fig. 7.2).
x0
x0
x(t)
x(t)
t0 tt^0
Figura 7.2 Ilustracion de estabilidad exponencial uniforme: un lımite de decaimiento exponencial es independiente del tiempo inicial to.
Un estado de equilibrio es inestable si no es estable. Una definicion ε−δ de inestabilidad es dada a continuacion.Definicion 7. Un estado de equilibrioxe se dice que esinestablesi existe unε > 0 tal que para cualquierδ > 0
existex(to) tal que si‖x(to)−xe‖< δ , entonces‖x(t1)−xe‖ ≥ 0 para algun t1 > to.Una interpretacion geometrica en dos dimensiones de las definiciones arriba esta mostrada en la Fig. 7.3. Asumiendo
quexe = 0 es el estado de equilibrio. Si el estado de equilibrio es estable, como en la Fig. 7.3(a), entonces dado uncirculo externo de radioε, entonces existe un circulo interno de radioδ tal que las trayectorias comenzando dentrodel circulo-δ nunca dejen el circulo-ε. Si el estado de equilibrio es asintoticamente estable, entonces las trayectoriastienden al estado de equilibrio a medida quet tiende al∞. Esta situacion es descrita en la Fig. 7.3(b). Finalmente, si elestado de equilibrio es inestable, como en la Fig. 7.3(c), entonces existe un circulo-ε tal que para cualquier circulo-δexiste una trayectoria comenzando dentro del mismo que dejael circulo-ε en algun tiempo posterior. Una interpretaciongeometrica del escenario descrito arriba en una dimension esta dada en la Fig. 7.4.
7.1.2. Estabilidad segun Lyapunov
SeaV(x) =V(x1,x2, ...,xn) : Rn→R una funcion de valor real y seaS ⊂Rn sea una region compacta conteniendo
el origenx= 0 en su interior.Definicion 8.Decimos que una funcionV =V(x) essemi definida positivaenS , con respecto ax= 0, si:
1. V es continuamente diferenciable, esto es,V ∈ C 1.2. V(0) = 0.3. V(x)≥ 0 para todox∈S .
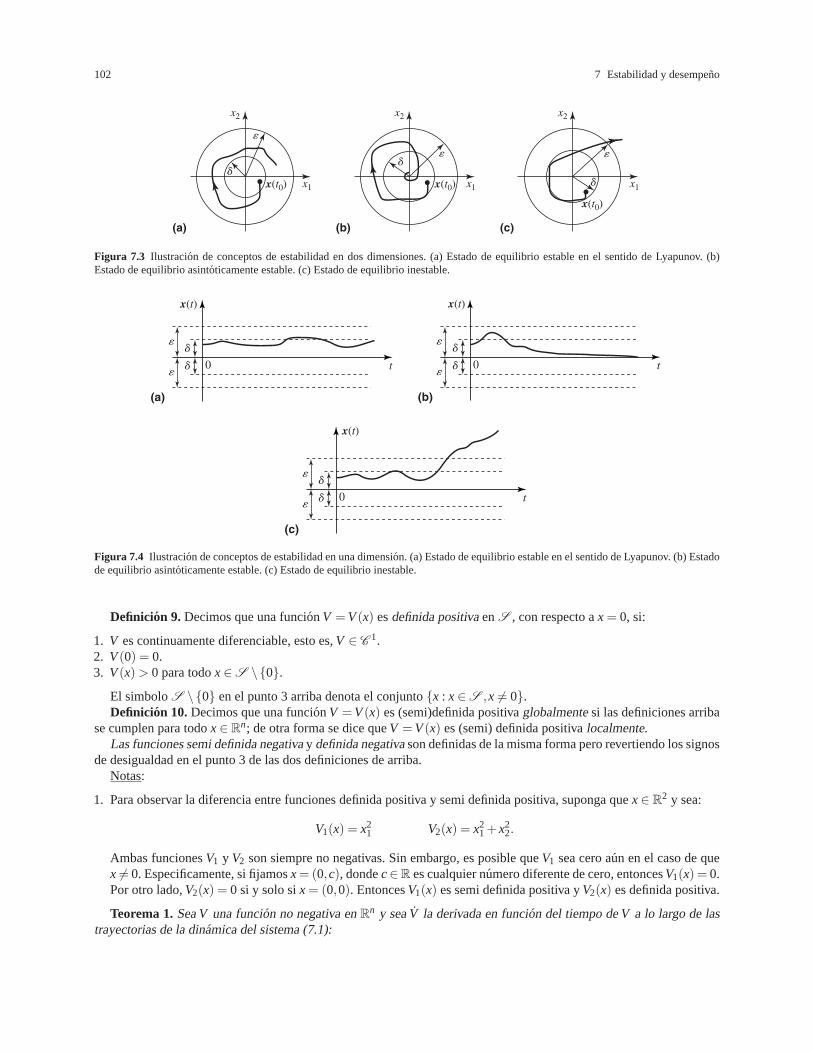
102 7 Estabilidad y desempeno
x1
x2
x(t0)
!
(a) (c)
x1
x2
x(t0)
!
(b)
x(t0)
!
x1
x2
Figura 7.3 Ilustracion de conceptos de estabilidad en dos dimensiones. (a) Estado de equilibrio estable en el sentido de Lyapunov. (b)Estado de equilibrio asintoticamente estable. (c) Estado de equilibrio inestable.
!
!
0 t
x(t)
(a)
!
!
0 t
x(t)
(b)
!
!
0 t
x(t)
(c)
Figura 7.4 Ilustracion de conceptos de estabilidad en una dimension. (a) Estado de equilibrio estable en el sentido de Lyapunov. (b) Estadode equilibrio asintoticamente estable. (c) Estado de equilibrio inestable.
Definicion 9.Decimos que una funcionV =V(x) esdefinida positivaenS , con respecto ax= 0, si:
1. V es continuamente diferenciable, esto es,V ∈ C 1.2. V(0) = 0.3. V(x)> 0 para todox∈S \0.
El simboloS \0 en el punto 3 arriba denota el conjuntox : x∈S ,x 6= 0.Definicion 10.Decimos que una funcionV =V(x) es (semi)definida positivaglobalmentesi las definiciones arriba
se cumplen para todox∈ Rn; de otra forma se dice queV =V(x) es (semi) definida positivalocalmente.
Las funciones semi definida negativay definida negativason definidas de la misma forma pero revertiendo los signosde desigualdad en el punto 3 de las dos definiciones de arriba.
Notas:
1. Para observar la diferencia entre funciones definida positiva y semi definida positiva, suponga quex∈ R2 y sea:
V1(x) = x21 V2(x) = x2
1+x22.
Ambas funcionesV1 y V2 son siempre no negativas. Sin embargo, es posible queV1 sea cero aun en el caso de quex 6= 0. Especificamente, si fijamosx= (0,c), dondec∈R es cualquier numero diferente de cero, entoncesV1(x) = 0.Por otro lado,V2(x) = 0 si y solo six= (0,0). EntoncesV1(x) es semi definida positiva yV2(x) es definida positiva.
Teorema 1.SeaV una funcion no negativa enRn y seaV la derivada en funcion del tiempo deV a lo largo de lastrayectorias de la dinamica del sistema (7.1):

7.1 Estabilidad 103
V =∂V∂x
dxdt
=∂V∂x
f (t,x(t)).
SeaSr = Sr(0) una bola de radior alrededor del origen. Si exister > 0 tal queV es definida positiva yV es semidefinida negativa para todox∈Sr , luegox= 0 es localmente estable segun Lyapunov. SiV es definida positiva yV esdefinida negativa para todox∈Sr , luegox= 0 es localmente asintoticamente estable.
Demostracion. Ver demostracion del Teorema 3.1 enNonlinear Systems, de H.K. Khalil, 1992.Notas:
1. Una funcionV que satisface las condiciones del teorema es llamadafuncion de Lyapunov.2. V(x) se puede definir como una funcion de energia que limita el tamano dex.
A continuacion damos una interpretacion geometrica del teorema de Lyapunov. Primero, notese que la funcion:
V =dV(x(t))
dt,
puede ser expresada, usando la regla de la cadena como:
V = ∇VT x= ‖∇V‖‖x‖cosθ ,
dondeθ es elangulo entre los vectores∇V y x. Si ‖x‖ = 1, entonces∇VT x puede ser entendida como el incrementodeV, evaluado en el puntox, en la direccion x. Entonces,V < 0 si y solo si 90o < θ < 270o. En ese caso, el vectorvelocidad ˙x(t) apunta en la direccion de decrecimiento deV. Ilustramos la discusion presentando Fig. 7.5. =
V
V c1
V c2 " c1
x·
Figura 7.5 Interpretacion geometrica del teorema de Lyapunov.
7.1.2.1. Ejemplos
Ejemplo 1
Sea el sistema:x1 =−x1−x2
x2 =−x2, determinar la estabilidad del punto de equilibriox= 0.
UsandoV(x) = x2
1+x22 > 0,∀x 6= 0
V(x) = 2x1x1+2x2x2
=−2x21−2x1x2−2x2
2=−(x1+x2)
2−x21−x2
2 < 0,∀x 6= 0
Luegox= 0 esglobalmenteasintoticamente estable.

104 7 Estabilidad y desempeno
Ejemplo 2. Funciones de Lyapunov motivadas por la fisica del problema: pendulo
Considere el pendulo, de masa unitaria, longitud unitaria, dondex1 es elangulo del pendulo con la vertical, yx2 esla velocidad angular del pendulo.
x1 = x2
x2 =−gsenx1
Para demostrar quexe = 0 (pendulo apuntando hacia abajo) es un punto de equilibrio estable, considere la siguientefuncion como candidata a funcion de Lyapunov:
V(x) = g(1−cosx1)+x2
2
2,
definida sobre el conjuntox∈ Rn :−π < x1 < π 0. Luego,
V(x) =[
gsenx1 x2][
x2
−gsenx1
]
= 0,
entonces el punto de equilibrioxe = 0 es estable. ¿ Es el puntoxe = 0 asintoticamente estable?
Ejemplo 3. Funciones de Lyapunov motivadas por la fisica del problema: pendulo con friccion
Considere el pendulo del ejemplo anterior pero esta vez incluya friccion unitaria:
x1 = x2
x2 =−gsenx1−x2
Sea la funcion de Lyapunov candidata:
V(x) = g(1−cosx1)+x2
2
2,
definida sobre el conjuntox∈ Rn :−π < x1 < π 0. Luego,
V(x) =[
gsenx1 x2][
x2
−gsenx1−x2
]
=−x22,
entoncesV(x) es semidefinida negativa. No es definida negativa porqueV(x) = 0 parax2 = 0 independientemente delvalor dex1; esto esV(x) = 0 a lo largo del ejex1. De ahı que solo podamos concluir que el origen es estable. Sinembargo, si graficaramos el diagrama de plano de fase de la ecuacion del pendulo se podrıa observar que el origenes asintoticamente estable. La funcion de Lyapunov no demuestra esteultimo hecho. A continuacion se presenta unteorema (corolario) enunciado por LaSalle que nos permitira extender las conclusiones de estabilidad del origen usandofunciones de Lyapunov.
Corolario 1 Seax = 0 un punto de equilibrio para el sistema (??). SeaV : S → R una funcion definida pos-itiva contınuamente diferenciable en el dominioS que contiene al origenx = 0, tal queV(x) ≤ 0 en S . SeaM = x ∈ S |V(x) = 0 y suponer que ninguna solucion puede estar enM, excepto la solucion trivial. Luego elorigen es asintoticamente estable. ⋄
Demostracion Ver Khalil, Seccion 3.2 - Principio de Invariancia. ⋄
Ejemplo 4. Funciones de Lyapunov motivadas por la fisica del problema: control de posicion de un robot
Una tarea fundamental en robotica para los manipuladores es transferir objetos de un punto a otro, el problemade control de posicion de un robot. Muchas de las aplicaciones venıan haciendo uso de controladores proporcionalesderivativos; sin embargo, no se presentaba una justificacion teorica para la estabilidad de tales sistemas de controldebido a la dinamica altamente no lineal del robot.

7.1 Estabilidad 105
Un robot consiste en un numero de eslabones conectadas por juntas translacionales orotacionales, siendo que elultimo eslabon posee una especie de efector (actuador final). La dinamica de un brazo robotico den-eslabones puedeser representado por:
H(q)q+b(q, q)+g(q) = τ ,
dondeq es el vectorn-dimensional que describe la posicion de las juntas,τ es el vector de torques de entrada,g es elvector de torques gravitacionales,b representa las fuerzas de Coriolis y fuerzas centripetas causadas por el movimientode los eslabones, yH es la matriz de inerciasn×n del brazo robotico.
Considere un controlador compuesto por un termino proporcional derivativo y un termino de compensacion degravedad.
τ =−KDq−KPq+g(q),
dondeKD y KP son matrices constantes definidas negativas.Con la ayuda de un entendimiento fısico del problema, se puede encontrar una funcion de Lyapunov para un sistema
robotico complejo. Primero, notese que la matriz de inerciaH(q) es definida positiva para cualquierq. Segundo,el termino de control PD puede ser interpretado como una combinacion de resortes y amortiguadores. Este analisissugiere la siguiente funcion de Lyapunov candidata:
V =12[qTHq+qTKpq],
donde el primer termino representa la energia cinetica del manipulador, y el segundo termino denota la “energia poten-cial artificial” asociada al resorte virtual en la ley de control.
Para calcular la derivada de la funcion V se puede usar el teorema de energia en mecanica que estipula que lavariacion en la energia cinetica es igual a la potencia dotada por las fuerzas externas.Entonces:
V = qT(τ−g)+ qTKPq.
Substituyendo la ley de control en la ecuacion arriba se tiene:
V =−qTKDq≤ 0.
Y del Teorema 1, el origen es estable. Analizando el caso cuando V(q, q) = 0: q= 0 y siendo que el brazo no puede“atorarse” en una posicion tal queq 6= 0 (que puede mostrarse facilmente notando que la aceleracion es diferente decero en tales situaciones), el brazo robotico debe establecerse enq= 0. Luego, usando el Corolario 1, el origen es enrealidadglobalmenteasintoticamente estable.
Dos lecciones se pueden sacar de este ejemplo pratico: 1) usar las propiedades fısicas como sea posible cuandose analice el comportamiento del sistema, y 2) conceptos fısicos como energia nos llevan a elecciones acertadas defunciones de Lyapunov.
Figura 7.6 Un manipulador robotico.

106 7 Estabilidad y desempeno
Notas:
1. P: ¿Como encontramos la funcion de Lyapunov?R (antes del 2000): adivinarR (despues del 2000): SOSTOOLS (MATLAB Toolbox), para sistemas polinomiales con coeficientes conocidos
2. Teorema inverso: sixe= 0 es asintoticamente estable entonces existeV definida positiva yV definida negativa. Estoimplica, que si uno busca, uno puede encontrar una funcion de Lyapunov.
3. A menudo el caso deV(x) = xTPx funciona, dondeP∈ Rn×n es una matriz simetrica (P= PT ). La condicion que
V es definida positiva es equivalente a la condicion queP una matriz definida positiva:
xTPx> 0 para todox 6= 0,
que se puede escribir comoP > 0. Se puede mostrar que siP es simetrica y definida positiva entonces todos susautovalores son reales y positivos. Los conjuntos nivel dexTPx son elipsoides.
7.1.2.2. Funciones de Lyapunov para sistemas lineales
Considere un sistema dinamico lineal invariante en el tiempo modelado por la ecuacion:
x= Ax, x(to) = xo.
Consideramos la funcion de Lyapunov cuadratica:
V(x) = xTPx,
dondeP es una matrizn×n real simetrica. La derivada en funcion del tiempo deV(x(t)) evaluada en la solucion dex= Ax es:
dV(x(t))dt
= V(t)
= xT(t)Px(t)+xT(t)Px(t).
Sustituyendo ˙x= Ax y xT = xTAT en la ecuacion arriba resulta en:
V = xTATPx+xTPAx
= xT(ATP+PA)x.
El requerimiento que la funcionV sea definida positiva es equivalente a que la matrizP sea definida positiva (P> 0);y el requerimiento queV sea definida negativa es equivalente a la condicion:
Q= ATP+PA< 0, (7.2)
(como matriz). Luego el problema se centra en determinar si la matriz simetricaQ definida por la denominadaecuacionde Lyapunoven (7.2) es definida negativa. Si este es el caso luegoV satisface las condiciones del Teorema 1, y el origenesglobalmente asintoticamente estable.
Ejemplo 1
Sea un sistema lineal donde:
A=
[−1 30 −1
]
,
es asintoticamente estable. EligiendoP como:
P=
[1 00 1
]
= I2 > 0.

7.1 Estabilidad 107
Luego,
Q= ATP+PA=
[−2 33 −2
]
,
que es indefinida. Entonces, a menos queQ resultase definida negativa, nada se puede inferir acerca dela estabilidadasintotica, usando el teorema de Lyapunov, para cuando comenzamos conP y luego calculamosQ.Una forma masutil de estudiar la estabilidad de sistemas lineales usandofunciones cuadraticas es encontrando unamatrizP para una funcion Q definida negativa dada; ası:
elegir una matrizQ definida negativaresolver paraP de la ecuacion de Lyapunov en (7.2)verficar siP es definida positiva
Si P es definida positiva, luegoxTPxes una funcion de Lyapunov para el sistema lineal y la estabilidad asintotica globalesta garantizada.
Ejemplo 2Considere el sistema lineal:
dx1
dt=−ax1
dx2
dt=−bx1−cx2.
cona,b,c> 0, para el cual tenemos:
A=
[−a 0−b −c
]
P=
[p11 p12
p21 p22
]
.
ElegimosQ=−I ∈ R2×2 y la ecuacion de Lyapunov correspondiente es:
[−a −b0 −c
][p11 p12
p21 p22
]
+
[p11 p12
p21 p22
][−a 0−b −c
]
=
[−1 00 −1
]
y resolviendo para los elementos deP tenemos:
P=
[b2+ac+c2
2a2c+2ac2−b
2c(a+c)−b
2c(a+c)12
]
o la correspondiente funcion de Lyapunov:
V(x) =b2+ac+c2
2a2c+2ac2 x21−
−b2c(a+c)
x1x2+12
x22.
Es facil verificar queP (verificar los autovalores) y por construccion V = −I < 0. Entonces el origen es globalmenteasintoticamente estable.
Uno de los elementos esenciales en el problema de control es buscar la forma de probar el desempeno de cualquierley de control propuesta. Cuando sea que usamos el termino “mejor” u “optimo” para describir la efectividad de unaestrategia de control dada, lo hacemos con respecto a unındice numerico de desempeno llamadoındice de desempeno.Asumimos que el valor delındice de desempeno disminuye a medida que la calidad de una ley de control admisibleaumenta. El controlador admisible que asegura el cumplimiento de un objetivo del sistema y que al mismo tiempominimiza elındice de desempeno es llamado decontroladoroptimodel sistema.

108 7 Estabilidad y desempeno
7.2. Indices de desempeno
Construir unındice de desempeno -esto es, escoger una forma de medir el desempeno - puede ser considerado partedel modelado del sistema. Aquı, discutiremos alguna elecciones tıpicas deındices de desempeno.
Primero, suponemos que el objetivo es controlar un sistema modelado por las ecuaciones a continuacion:
x(t) = Ax(t)+Bu(t), x(to) = xo,y =Cx(t)
(7.3)
en un intervalo fijo[to, t f ] tal que los componentes del vector de estado sean “pequenos”. Un ındice de desempenoapropiado de la minimizacion serıa:
J1 =∫ t f
toxT(t)x(t)dt. (7.4)
Obviamente, siJ1 es pequeno, entonces la norma del vector de estados,‖x(t)‖, es pequena en el sentido delındice dedesempeno descrito arriba.
Si el objetivo es controlar el sistema tal que los componentes de la salida,y(t), sean pequenos, entonces podriamosusar el siguienteındice de desempeno:
J2 =∫ t f
toyT(t)y(t)dt
=∫ t f
toxT(t)CTCx(t)dt
J2 =∫ t f
toxT(t)Qx(t)dt, (7.5)
donde la matriz de ponderacion Q=CTC es simetrica semi definida positiva.En el caso cuando deseamos controlar el sistema de tal forma que los componentes de la entrada,u(t), sean “no
muy grandes”, unındice de desempeno (esfuerzo de control mınimo) apropiado a ser minimizado es:
J3 =∫ t f
touT(t)u(t)dt, (7.6)
o,
J4 =∫ t f
touT(t)Ru(t)dt, (7.7)
donde la matriz de ponderacion R es simetrica definida positiva. No hay perdida de generalidad si asumimos quela matriz de ponderacion R es simetrica. SiR no fuese simetrica, podriamos representar el termino cuadratico uTRuequivalentemente como
uTRu= uT(
R+RT
2
)
u,
donde la matriz12(R+RT) es simetrica.Como mencionado por Owens (ver referencias al final), no se puede minimizar simultaneamente losındices de
desempeno (7.4) y (7.6) porque la minimizacion de (7.4) requiere de senales de control grandes, mientras que la mini-mizacion de (7.6) requiere de senales de control pequenas. Para resolver el dilema podemos establecer un compromisoentre estos dos objetivos conflictivos mediante la minimizacion de unındice de desempeno que sea una combinacionconvexa deJ1 y J3,
J = λJ1+(1−λ )J3
=
∫ t f
to(λxT(t)x(t)+(1−λ )uT(t)u(t))dt, (7.8)
dondeλ es un parametro en el rango[0,1]. Si λ = 1, luegoJ = J1; y si λ = 0, luegoJ = J3. Mediante tentativa y error,podemos seleccionarλ del intervalo[0,1] para establecer un compromiso entre los dos extremos. Una generalizaciondel ındice de desempeno (7.8) es:

7.2 Indices de desempeno 109
J =∫ t f
to(xT(t)Qx(t)+uT(t)Ru(t))dt.
En algunas aplicaciones, podemos desear que el estado finalx(t f ) este los mas cerca posible a cero. Entonces unaposible medida del desempeno (control terminal) a ser minimizada serıa:
J = xT(t f )Fx(t f ), (7.9)
dondeF es una matriz simetrica definida positiva.Combinando las medidas de desempeno (7.5), (7.7) y (7.9) cuando nuestro objetivo de control esmantener los
estados “pequenos”, la entrada de control “no muy grande”, y el estado final lo mas cerca de cero como sea posible. Elındice de desempeno resultante es:
J =12
xT(t f )Fx(t f )+12
∫ t f
to(xT(t)Qx(t)+uT(t)Ru(t))dt, (7.10)
donde el factor12 es usado para simplicar las operaciones algebraicas siguientes. Minimizar (7.10) sujeto a (7.3) esllamado de el problema delregulador cuadratico lineal, o el problema LQR en siglas.
En algunos casos, el objetivo del controlador es forzar que los estados del sistema sigan una trayectoria deseada,xd(t), a lo largo del intervalo[to, t f ] a la vez que mantienen las desviaciones del estado actualx(t) “pequenas” con re-specto a las trayectorias deseadas con un esfuerzo de control u(t) “no muy grande”, en este caso elındice de desempeno(seguimiento de trayectorias con esfuerzo de control mınimo) serıa:
J =12
∫ t f
to((x(t)−xd(t))
TQ(x(t)−xd(t))+uT(t)Ru(t))dt. (7.11)
Si el objetivo de control consiste en seguimiento de trayectorias con esfuerzo de control mınimo ademas de poseerun estado finalx(t f ) tan cerca como sea posible del estado deseadoxd(t f ), el ındice de desempeno apropiado a serminimizado en este caso podrıa ser:
J =12(x(t f )−xd(t f ))
TF(x(t f )−xd(t f ))+12
∫ t f
to((x(t)−xd(t))
TQ(x(t)−xd(t))+uT(t)Ru(t))dt. (7.12)
Para llevar un sistema de una condicion inicial x(to) = xo a un conjunto objetivo especıfico Sen tiempo mınimo, elındice de desempeno tiempo mınimoa ser minimizado es:
J = t f − to =∫ t f
todt, (7.13)
cpnt f siendo el primer instante de tiempo en quex(t) y Sse intersectan.En esta parte presentaremos el problema de optimizacion cuando no hay dependencia del tiempo. La discusion
preparara las bases para el tema que viene a continuacion que involucra optimizacion con sistemas variantes en eltiempo.
Fuente: Capıtulos 4 y 5 del libroSystems and Controlde Stanislaw H. Zak, Oxford University Press, 2003.Fuente: Capıtulo 6 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astrom y
Richard M. Murray.Fuente: Nonlinear Systems, de H.K. Khalil, Macmillan Publishing Company, 1992.Fuente: Nonlinear Systems Analysis, de M. Vidyasagar, Prentice-Hall, Second Edition, 1993.Fuente: Advanced Control System Design, de B. Friedland, Prentice-Hall, 1996.

Capıtulo 8Control Optimo
Una vez que se ha elegido elındice de desempeno, el siguiente paso es determinar la ley de control que minimiceese criterio. Dos metodos que pueden ser usados para la minimizacion son el principio de maximalidad de Pontryaginy el metodo de programacion dinamica desarrollado por R. Bellman. El abordaje variacionalde Pontryagin conlleva aun problema de condiciones de frontera en dos puntos que debeser resuelto para obtener el controloptimo. El metodode programacion dinamica conduce a un ecuacion funcional que puede ser resuelta usando una computadora digital.
8.1. Problema del ControlOptimo
En lo que queda del curso discutiremos el como disenar controladoresoptimos y observadoresoptimos. Los resul-tados de controloptimo seran derivados usando calculo variacional. El resultado sera aplicado al caso de unındice dedesempeno cuadratico para un sistema lineal. Ası, la ecuacion de Riccati, dependiente y no del tiempo, sera derivadapara resolver el problema del regulador cuadratico lineal. La ecuacion de Riccati puede ser resuelta si el sistema esestabilizable. Luego, la solucion del problema del regulador cuadratico lineal existe siempre que el sistema sea estabi-lizable. El problema de observacion optima es dual al problema del regulador cuadratico lineal. Un observadoroptimoa menudo se denomina filtro de Kalman o filtro de Kalman-Bucy.
Para comenzar, seran presentadas algunas ideas de calculo variacional, necesarias para la derivacion del controloptimo.
8.1.1. Calculo Variacional
En esta seccion estaremos preocupados en minimizar unındice de desempeno aumentadoJ′ = J′(x(t), t) (eliminare-mos por ahora la dependencia enu(t)). Para llevar a cabo la minimizacion, necesitaremos encontrar el cambio inducidoenJ′ por los cambios independientes de todos sus argumentos. Sinembargo, el cambio enJ′ dependera del tiempo yde los diferencialesdt y dx, siendo que lasultimas cantidades no son independientes. En esta parte derivaremos unarelacion de utilidad trabajar esta observacion.
Si x(t) es una funcion contınua del tiempot, luego los diferencialesdx(t) y dt no son independientes del tiempo. Acontinuacion definiremos un pequeno cambio enx(t) que es independiente dedt. Sea lavariacionenx(t), δx(t), comoun cambio incremental enx(t) cuando el tiempot es mantenido fijo.
Para encontrar las relaciones entredx, δx, y dt, examinemos la Fig. 11.8. La figura muestra la funcion originalx(t) y una funcion vecinax(t)+ dx(t) sobre un intervalo especificado por un tiempo inicialto y un tiempo finalT.En adicion al incrementodx(t) a cada tiempot, el tiempo final ha sido incrementado pordT. Es claro de la figuraque el incremento total enx al tiempoT, dx(T), depende dedT. De acuerdo a nuestra definicion la variacion δx(T)ocurre para un valor fijo det = T como mostrado y es independiente dedT. Siendo quex(t) y x(t)+ dx(t) tienenaproximadamente la misma pendiente ˙x(T) en el tiempt = T, y siendo quedT es pequeno, se tiene:
dx(T) = δx(T)+ x(T)dT. (8.1)
111

112 8 ControlOptimo
Esta relacion es la que usaremos mas adelante.
Figura 8.1 Relacion entre la variacion δx y el diferencialdx
Otra relacion que usaremos es la regla de Leibniz para funcionales: six(t) ∈ Rn es una funcion det y,
J(x) =∫ T
toh(x(t), t)dt, (8.2)
dondeJ(·) y h(·) son dos funcionales escalares reales (en otras palabras, funciones de la funcion x(t)), luego:
dJ= h(x(T),T)dT−h(x(to), to)dto+∫ T
to
[hT
x (x(t), t)δx]dt. (8.3)
Nuestra notacion es:
hx =∂h∂x
.
8.1.2. Solucion del problema de optimizacion
La filosofia de este capitulo es derivar la solucion del problema de controloptimo de la forma mas general.
8.1.2.1. Formulacion del problema
Suponiendo que la planta es descrita por un sistema no lineales variantes en el tiempo de la forma:
x= f (x(t),u(t), t), (8.4)
dondex∈ Rn y u∈ R
m son las variables de estado y entradas de control, respectivamente, yf (·, ·) es una funcion nolineal que satisface la condicion usual para existencia de la solucion de la ecuacion diferencial.
Con este sistema se puede asociar el siguienteındice de desempeno o funcional de costo:
J(x(t),u(t), t) = F(x(T),T)+∫ T
toL(x(t),u(t), t)dt, (8.5)

8.1 Problema del ControlOptimo 113
donde[to,T] es el intervalo de tiempo de interes. La funcion de ponderacion finalF(x(T),T) depende del estado final yel tiempo final, y la funcion de ponderacionL(x,u, t) depende del estado y entrada en los tiempo intermedios en[to,T].
El ındice de desempeno arriba presentado es bastante general y puede cubrir la clase de problemas practicosdefinidos en la seccion anterior.
El problema de controloptimoconsiste en encontrar la entradau∗(t) en el intervalo de tiempo[to,T] que lleva laplanta (8.4) a lo largo de la trayectoriax∗(t) tal que la funcion de costo (8.5) sea minimizada,y tal que:
ψ(x(T),T) = 0, (8.6)
para una funcion ψ ∈ Rp. Estaultima condicion corresponde al problema con funcion del estado final fijo.
Los roles de la funcion de ponderacion final F y la funcion del estado final fijoψ no deben ser confundidos.F(x(T),T) es una funcion del estado final que queremos hacerpequena. Una ilustracion debe ser la energıa, que es[xT(T)S(T)x(T)]/2 dondeS(T) es una matriz de ponderacion dada. Por otro lado,F(x(T),T) es una funcion del estado
final que nosotros queremosfijo e igual a cero. Como ilustracion considere un satelite con estadox=[
r r θ θ]T
, donder y θ es el radio y posicion angular. Si queremos que el satelite se ubique en unaorbita polar con radioR, luego lafuncion del estado final a ser igualada a cero debe ser:
ψ(x(T),T) =
r(T)−Rr(T)
θ(T)−√
µR3
,
conµ = GM, la constante gravitacional que atrae a la masaM.
8.1.2.2. Solucion del problema
Para resolver el problema de controloptimo, usaremos multiplicadores de Lagrange para sumar las restricciones(8.4) y (8.6) alındice de desempeno (8.5). Dado que (8.4) se debe mantener para cadat ∈ [to,T], se requiere unmultiplicador asociadoλ (t) ∈ R
n, que es funcion del tiempo. Dado que (8.6) debe mantenerse solo en un tiempo,requerimos de un multiplicador asociado constanteν ∈ R
p. El ındice de desempeno asociado es entonces:
J′ = F(x(T),T)+νTψ(x(T),T)+∫ T
to
L(x,u, t)+λ T(t) [ f (x,u, t)− x]
dt. (8.7)
Si definimos lafuncion Hamiltonianacomo:
H(x,u, t) = L(x,u, t)+λ T f (x,u, t), (8.8)
podemos escribir (8.7) como:
J′ = F(x(T),T)+νTψ(x(T),T)+∫ T
to
H(x,u, t)−λ T x
dt. (8.9)
Usando la regla de Leibniz, el incremento enJ′ como funcion de los incrementos enx, λ , ν , u y t es:
dJ′ = (Fx+ψTx ν)Tdx|T +(Ft +ψT
t ν)dt|T +ψT |Tdν +(H−λ T x)dt|T − (H−λ T x)dt|to+∫ T
to
[HT
x δx+HTu δu−λ Tδ x+(Hλ − x)Tδλ
]dt.
(8.10)
Para eliminar la variacion enx, integrando por partes para ver que:
−∫ T
toλ Tδ xdt=−λ Tδx|T +λ Tδx|to +
∫ T
toλ Tδxdt. (8.11)
Sustituyendo (8.11) en (8.10) y expresandoδx(T) en terminos dedx(t) y dT usando (??), se tiene:

114 8 ControlOptimo
dJ′ = (Fx+ψTx ν−λ )Tdx|T +(Ft +ψT
t ν +H−λ T x+λ T x)dt|T +ψT |Tdν +(H−λ T x+λ T x)dt|to+λ Tdx|to +
∫ T
to
[
(Hx+ λ )Tδx+HTu δu+(Hλ − x)Tδλ
]
dt.(8.12)
De acuerdo a la teoria de Lagrange, el mınimo con restricciones deJ es obtenido en el mınimo sin restricciones deJ′. Este mınimo se alcanza cuandodJ′ = 0 para todos los incrementos independientes en sus argumentos. Fijando encero los coeficientes de los incrementos independientesdν , δx, δu, y δλ se obtienen las condiciones para un mınimocomo mostrado en la Tabla 1. Para nuestras aplicaciones,to y x(to) son ambos fijos y conocidos, tal quedto y dx(to)son ambos cero. Los dos terminos evaluados ent = to en (8.12) son automaticamente igual a cero.
La condicion final en (8.13) necesita mas discusion. Hemos visto quedx(T) y dT no son independientes (Fig.8.1). Entonces, no podemos fijar los coeficientes de los dos primeros terminos de (8.12) igual a cero ent = T. Lacomplejidad de (8.13) se debe a que las ecuaciones como dadaspermiten posibles variaciones en el tiempo finalT.
Notese que la ecuacion de coestado es una ecuacion dinamica que debe ser desarrolladaretrocediendoen el tiempo.Esta ecuacion de coestado es tambien llamada laadjuntade la ecuacion de estado.
Modelo del sistema:x= f (x,u, t) t ≥ to, to fixed
Indice de desempeno:J = F(x(T),T)+
∫ Tto L(x,u, t)dt
Restriccion estado final:ψ(x(T),T) = 0
Controladoroptimo:Hamiltoniano:
H(x,u, t) = L(x,u, t)+λ T f (x,u, t)Ecuacion de estado:
x=∂H∂λ
= f , t ≥ to
Ecuacion de coestados:
-λ =∂H∂x
=∂ f T
∂xλ +
∂L∂x
, t ≤ T
Condicion estacionaria:
0=∂H∂u
=∂L∂u
+∂ f T
∂uλ
Condicion de frontera:x(to) dado(Fx+ψT
x ν−λ )T |Tdx(T)+(Ft +ψTt ν +H)|TdT = 0 (8.13)
Tabla 1. Controladoroptimo no lineal contınuo con funcion de estado final fijo
La Tabla 1 muestra que el problema de control depende de la solucion de un problema de valor de frontera en dospuntos, esto porquex(to) es dado yλ (T) es determinado por (8.13). En general este es un problema difıcil de resolver.
En realidad no nos interesa el valor deλ (t), pero este debe ser evidentemente determinado como un paso intermediopara encontrar la ley de controloptimau∗(t), que depende deλ (t) a traves de la condicion estacionaria.
Es importante destacar lo siguiente. La derivada en el tiempo del Hamiltoniano es:
H = Ht +HTx x+HT
u u+ λ T f = Ht +HTu u+(Hx+ λ )T f . (8.14)
Si u(t) es el controloptimo, luego:H = Ht . (8.15)
Ahora, en el caso de sistemas invariantes en el tiempo,f y L no son funciones explıcitas del tiempot, y tampoco lo esH. En esta situacion:
H = 0. (8.16)
Luego para sistemas y funcionales de costo invariantes en eltiempo, el Hamiltoniano es unaconstanteen la trayectoriaoptima.

8.1 Problema del ControlOptimo 115
8.1.2.3. Ejemplos
Los primeros ejemplos establecen que la solucion al problema de optimizacion dado en la Tabla 1 es bastantegeneral. Los siguientes ejemplos ilustran el calculo del controladoroptimo
Control de temperatura en un cuartoSe desea calentar un cuarto usando la menor energıa posible. Siθ(t) es la temperatura del ambiente,θa la temperaturadel aire fuera del ambiente (una constante), yu(t) la tasa de provision de calor hacia el ambiente, luego la dinamicaesta dada por:
θ =−a(θ −θa)+bu,
para algunas constantesa y b, que dependen del aislamiento del ambiente entre otros. Si definimos el estado como:
x(t) = θ(t)−θa,
la ecuacion espacio de estados se puede escribir como:
x=−ax= bu.
Para poder controlar la temperatura en un intervalo fijo de tiempo[0,T] con la menor provision posible de energıa,definimos elındice de desempeno como:
J =12
∫ T
0u2(t)dt.
A continuacion discutiremos dos objetivos de control posibles. El Hamiltoniano es:
H =u2
2+λ (−ax+bu).
De acuerdo a la Tabla 1, el controloptimou(t) es determinado resolviendo:
x= Hλ =−ax+bu,λ = −Hx = aλ ,0= Hu = u+bλ .
La condicion estacionaria dice que la ley de control esta dada por:
u(t) =−bλ (t),
entonces para determinaru∗(t) solo necesitamos encontrar el coestadooptimoλ ∗(t).Reemplazando en las ecuaciones de estado y coestado, se tiene:
x= −ax−b2λ ,λ = aλ ,
que deben ser resueltas paraλ ∗(t) y el estadooptimox∗(t).Aun no conocemos cual es el coestado finalλ (T), pero supongamos que si lo conocemos y resolvamos el conjunto
de ecuaciones anterior. Luego se tiene:λ (t) = e−a(T−t)λ (T).
y:x=−ax−b2λ (T)e−a(T−t).
Usando transformada de Laplace para resolver esta ecuacion se tiene:
X(s) =x(0)s+a
− b2λ (T)e−aT
(s+a)(s−a),
=x(0)s+a
− b2
aλ (T)e−aT
( −1/2(s+a)
+1/2
(s−a)
)
,

116 8 ControlOptimo
tal que:
x(t) = x(0)e−at− b2
aλ (T)e−aT sinhat.
Para encontralλ (T), consideremos dos objetivos de control, los mismos que daran dos formas de obtenerλ (T).a. Estado final fijoSuponga que la temperatura inicial de ambiente es igual aθa = 60o. Luego:
x(0) = 0o.
Sea nuestro objetivo de control aquel que lleve la temperatura finalθ(T) a exactamente 70o en un tiempo final deTsegundos. Luego el estado final requerido es de:
x(T) = 10o.
Note que dado que el tiempo final y el estado final estan ambos fijos,dT y dx(T) son ambos ceros, tal que (8.13) essatisfecha.
Usando las condiciones parax(0) y x(T), se puede encontrarλ (T) y el control optimo. Para encontrarλ (T), setiene:
x(T) = x(0)e−at− b2
2aλ (T)(1−e−2aT).
Luego el coestado final sera:
λ (T) =20a
b2(1−e−2aT),
tal que la trayectoriaoptima del coestado es:
λ ∗(t) =− 10eat
b2sinhaT.
Finalmente la tasaoptima de provision de calor hacia el ambiente esta dada por:
u∗(t) =10eat
bsinhaT, 0≤ t ≤ T.
Usando la ley de controloptima, la trayectoriaoptima pra el estado resulta:
x∗(t) = 10sinhatsinhaT
.
Que resulta enx∗(T) = 10, como deseado.b. Estado final libreSuponga que no estamos preocupados con que el estado finalx(T) sea exactamente 10o, la demanda es que la ley decontrol minimice:
J =12
s(x(T)−10)2+12
∫ T
0u2(t)dt,
para algun pesos∈ R. Si s es grande luegi la solucion optima estara cerca a 10o, dado que solo el primer terminocontribuira mas en el costo.
De acuerdo a la Tabla 1, las ecuaciones de estado y coestado todavıa son las mismas del casoa.:
λ (t) = e−a(T−t)λ (T).
x(t) = x(0)e−at− b2
aλ (T)e−aT sinhat.
La condicion inicial todavıa es:x(0) = 0o,
pero la condicion dinal debe ser determinada usando (8.13). El tiempo finalT es fijo, tal quedT = 0 y el segundotermino de (8.13) es automaticamente igual a cero. Dado quex(T) no es fijo,dx(T) no es cero (como en la partea.).

8.2 Regulador cuadratico lineal, (LQR por sus siglas en ingles) 117
Luego se requiere que:
λ (T) =∂F∂x
∣∣∣∣T= s(x(T)−10).
Reemplazar apropiadamente...
8.2. Regulador cuadratico lineal, (LQR por sus siglas en ingles)
La planta a ser investigada es una planta lineal (o linealizada) pero puede ser variante en el tiempo:
x(t) = A(t)x(t)+B(t)u(t), x(to) = xo. (8.17)
El controlador es requerido para minimizar una funcion de costo1 con forma particular,ındice de desempenocuadratico:
J(u) =12
xT(T)F(T)x(T)+12
∫ T
to
[xT(t)Q(t)x(t)+uT(t)R(t)u(t)
]dt. (8.18)
El tiempo final es fijo pero el estado final se puede desviar de cero, como requerido porF(T) ≥ 0. Las matrices deponderacion de las senales de estado y control son semidefinida positiva y definidapositiva, respectivamente,Q(t)≥ 0y R(t)> 0,∀t.
La condicion de frontera esta dada por:λ (T) = F(T)x(T), (8.19)
puesto queF(x(T),T) = 12xT(T)F(T)x(T) y se debe cumplirFx−λ = 0.
El Hamiltoniano del sistema es:
H =12
xT(t)Q(t)x(t)+12
uT(t)R(t)u(t)+λ T(t) [A(t)x(t)+B(t)u(t)] . (8.20)
La ecuacion de coestado es:
λ (t) =− ∂H∂x(t)
=−Q(t)x(t)−AT(t)λ (t), (8.21)
y la ecuacion estacionaria es:
0=− ∂H∂u(t)
= R(t)u(t)+BT(t)λ (t)→ u(t) =−R−1(t)BT(t)λ (t). (8.22)
La ecuacion de estado y la de coestado son dos ecuaciones diferenciales en las variables de estado y coestado con lacondicion inicial de que el vector de estado comienza enx(to) = xo y que en el tiempo finalT el coestado obedecea (8.19). En general, resolver estas ecuaciones es bastantedifıcil debido al problema de contorno en dos puntos. Sinembargo en el caso lineal cuadratico es posible emplear un truco para poder resolver el problema.
Si (8.22) es insertada en la ecuacion de estados (8.17) entonces esta ecuacion y (8.21) pueden ser expresados como:
[x(t)λ (t)
]
=
[A(t) −B(t)R−1(t)BT(t)−Q(t) −AT(t)
][x(t)λ (t)
]
= H(t)
[x(t)λ (t)
]
. (8.23)
Esta es llamada laecuacion de Hamiltony la matrizH(t) es llamada matrizHamiltoniana.
1 Las matricesF(T), Q(t) y R(t) son llamadas matrices de ponderacion y determinan cuanto aumentara a la funcion de costo total ladesviacion dex(T), x(t) y u(t) a partir de sus ceros. La restriccion de queJ tenga un mınimo supone que esta limitado por abajo, luegotodos los terminos delındice deben ser no negativos para todo valor dex y u, entonces se debe cumplir queF(T)≥ 0, Q(t)≥ 0, y R(t)> 0,∀t.

118 8 ControlOptimo
8.2.1. Ecuacion de Riccati Diferencial (DRE, por sus siglas en ingles)
La solucion de esta ecuacion de estado de dimension-2n, es:[
x(t)λ (t)
]
= φ(t, to)[
x(to)λ (to)
]
=
[φ1(t, to) φ2(t, to)φ3(t, to) φ4(t, to)
][x(to)λ (to)
]
. (8.24)
Aplicando la propiedad de matriz de transicion, la solucion tambien puede ser escrita como:[
x(t)λ (t)
]
=−[
φ1(t,T) φ2(t,T)φ3(t,T) φ4(t,T)
][x(T)λ (T)
]
. (8.25)
Usando (8.19) y eliminandox(T) de las dos ecuaciones en (8.25) lleva a:
λ (t) = (φ3(t,T)+φ4(t,T)F(T)) [φ1(t,T)+φ2(t,T)F(T)]−1x(t), (8.26)
que puede ser escrito como:λ (t) = P(t)x(t). (8.27)
La matrizP(t) es una funcion del tiempo final constanteT asi como det, tal que serıa mas correcto escribirP comoP(t,T). Sin embargo la practica mas comun es omitir la dependencia deT.
De (8.19) se tiene que:P(T) = F(T). (8.28)
La senal de control esta luego dada por la ecuacion:
u(t) =−R−1(t)BT(t)P(t)x(t). (8.29)
Esta ecuacion muestra que el vector de control es derivado a partir del vector de estados.El problema que queda por resolver es determinar la matrizP(t). Esta matriz debe obedecer una ecuacion diferencial
que resulta de derivar (8.27) con respecto al tiempo:
λ (t) = P(t)x(t)+P(t)x(t). (8.30)
Insertando las ecuaciones de estado y coestado resulta:
−Q(t)x(t)−AT(t)P(t)x(t) = P(t)x(t)+P(t)[A(t)x(t)−B(t)R−1(t)BT(t)P(t)x(t)
]. (8.31)
Esta ecuacion tiene solucion para todox(t) si P(t) obedece la ecuacion diferencial:
0= P(t)+Q(t)−P(t)B(t)R−1(t)BT(t)P(t)+P(t)A(t)+AT(t)P(t), (8.32)
Esta importante ecuacion diferencial es conocida comoecuacion de Riccati diferencial. La condicion de frontera rele-vante esta dada por (8.28):
P(T) = F(T) (8.33)
A continuacion consideremos las implicancias del resultado obtenido: primero, la solucion del problema del regu-lador cuadratico lineal se reduce a un conjunto de ecuaciones diferenciales no lineales ordinarias. Segundo, la matrizP(t) puede ser determinada por integracion numerica de (8.32) retrocediendo en el tiempo - a partir det = T haciat = to - usando la condicion de fronteraP(T) = F(T). En realidad dado que la matrizP(t) es simetrica, necesitamosintegrar solon(n+1)/2 ecuaciones diferenciales.
Una vez queP(t) ha sido determinado, la ley de controloptima puede ser escrita como una senal de la forma:
u(t) =−K(t)x(t). (8.34)
La ganancia de realimentacion dependiente del tiempoK(t) es denominada gananciaLQR (ganancia del reguladorcuadratico lineal) o ganancia del reguladoroptimo y puede ser inferida de (8.29) como:

8.2 Regulador cuadratico lineal, (LQR por sus siglas en ingles) 119
K(t) = R−1(t)BT(t)P(t). (8.35)
La Fig. 8.2 muestra el diagrama de bloques de la realimentacion de estados para el regulador cuadratico lineal. Seobserva que en general la ganancia LQR sera dependiente del tiempo aun cuando el sistema sea LTI y la funcion decosto tenga matrices de ponderacion Q y R constantes. Notese que la ganancia del controlador LQR es un contro-lador lineal por realimentacion de estados y que la ganancia LQR solo depende de parametros que se conocen conanticipacion y luego podrıa ser calculado facilmenteoffline.
Figura 8.2 Sistema en lazo cerrado con LQR.
Una vez obtenida la ley de controloptima, el sistema en lazo cerrado esta dado por:
x(t) = Ac(t)x(t) = [A(t)−B(t)K(t)]x(t) (8.36)
8.2.2. Valor delındice de desempeno
El valor delındice de desempeno puede ser evaluado en base a la solucion de la ecuacion de Riccati. Primero, notarque:
ddt(xTPx) = xTPx+xT Px+xTPx.
Usando las ecuaciones (8.17), (8.29) y (8.32), se encuentraque:
ddt(xTPx) =−xTQx−uTRu.
Luego en elındice de desempeno (8.18) se obtiene:
J(u∗) =12
xT(T)F(T)x(T)− 12
∫ T
to
[ddt
xT(t)P(t)x(t)
]
dt,
=12
xT(T)F(T)x(T)− 12
xT(T)P(T)x(T)+12
xT(to)P(to)x(to)
Usando (8.33) los dos primeros terminos desaparecen y el valoroptimo (mınimo) delındice de desempeno es:
Jmın =12xT(to)P(to)x(to) (8.37)

120 8 ControlOptimo
8.2.3. Ejemplo integrador doble
Considere un integrador doble descrito por la ecuacion espacio de estado:
x(t) = Ax(t)+Bu(t) =
[0 10 0
][p(t)v(t)
]
+
[01
]
u(t)
El vector de estados esta formado por la posicion p(t) y la velocidadv(t) y la entrada de control es la aceleracionu(t).El ındice de desempeno a ser minimizado es:
J =12
xT(t f )Fx(t f )+12
∫ t f
to
[xT(t)Qx(t)+ρu2(t)
]dt
Aqui las matrices han sido seleccionadas como:
F =
[f11 f12
f12 f22
]
,
Q=
[rp 00 rv
]
,
ρ > 0.
Para queF y Q sean semidefinidas positivas, los parametrosrp, rv y ρ y los autovalores deF deben ser no negativos.Introduciendo las matrices de ponderacion en la ecuacion de Riccati diferencial resulta:
−P(t) = Q(t)−P(t)B(t)R−1(t)BT(t)P(t)+P(t)A(t)+AT(t)P(t)
=
[rp 00 rv
]
−P(t)
[01
]1ρ[
0 1]P(t)+P(t)
[0 01 0
]
+
[0 01 0
]
P(t)
ComoP(t) es simetrico tenemos que resolver tres ecuaciones para los elementos deP(t) =
[p11 p12
p12 p22
]
:
−p11 = rp− 1ρ p2
12
−p12 = p11− 1ρ p12p22
−p22 = rv+2p12− 1ρ p2
22
Estas ecuaciones tienen que ser resueltas retrocediendo enel tiempo desde el valor inicial en el tiempot f dondeP(t f ) = F . Integracion numerica con los valoresf11 = f12 = f22 = 1, rp = 3, rv = 4 y ρ = 1 resulta en la solucionmostrada en la Fig. 8.3. Se observa de la figura que los tres valores de los elementos de la matrizP(t) se aproximan auna constante cuandot f − t comienza a crecer.
La Fig. 8.4 muestra la respuesta del controloptimo para diversos valores de la matrizQ. Se observa que para grandesvalores de los elementos de la matrizQ, la respuesta es mas rapida pero con un mayor esfuerzo de control (senal decontrol mas grande).
8.3. Regulador cuadratico lineal en estado estacionario - Horizonte infinito
El control LQR antes mostrado es el controloptimo que minimiza elındice de desempeno sobre un intervalo detiempo finito[to,T]. Se demuestra que lleva a una ganancia de control variante enel tiempo que puede ser calculadaoffline. En la mayoria de los casos es mas conveniente tener una matriz de ganancia constante. Es preferible entoncesanalizar el problema de controloptimo con unındice de desempeno extendido hasta el infinito:

8.3 Regulador cuadratico lineal en estado estacionario - Horizonte infinito 121
0 4 8 10
1
2
3
4
5
time [sec]
p22
p12
p11
P(t)
Figura 8.3 Solucion de la ecuacion de Ricatti para el integradordoble.
0 1 2 3–1
0
1
0 1 2 3
–8
–4
0
NB. The dotted signal has a minimum at –60.
Control signal
position
velocity
time [sec]
rp = 3 , rv = 4rp = rv = 100rp = rv = 10000
Figura 8.4 Respuesta del sistema integrador doble con LQR.
J(u) = l ımt→∞
[∫ t
to[xT(t)QxT(t)+uT(t)Ru(t)
]
dt. (8.38)
Adicionalmente asumiremos que el sistema es invariante en el tiempo:
x(t) = Ax(t)+Bu(t), (8.39)
tal que todas las matrices son consideradas constantes yQ= QT ≥ 0 y R= RT > 0.Siendo que el problema de control LQR estandar consiste en mover los estados del sistema hacia cero deforma
optima, el vector de estadosx(t) se aproximara al vector cero a medida queT → ∞ si el sistema en lazo cerrado esestable. Luego no es relevante incluir el termino del estado final en elındice de desempeno, que es lo mismo queconsiderarF = 0 en (8.18).
8.3.1. Ecuacion de Riccati Algebraica (ARE, por sus siglas en ingles)
El valor optimo delındice esta dado por (8.37). Siendo que el sistema es LTI, el valor deJmın es independiente deltiempo, lo que significa que la matrizP debe ser constante. Esto implica queP= 0 y la ecuacion de Riccati se reducea:
0= Q−PBR−1BTP+PA+ATP. (8.40)
Este es un conjunto de ecuaciones algebraicas no lineales acopladas cuadraticas. En la practica se le llamaecuacion deRiccati algebraica.

122 8 ControlOptimo
La ecuacion (8.40) pueda tener multiples soluciones pero solo una de ellas provee una matrizP semidefinida positiva(siempre y cuando el sistema sea estabilizable) y la solucion particular lleva a:
Jmın =12xT
o P∞xo. (8.41)
dondeP∞ es la solucion constante de (8.40).La matriz de gananciasoptima para el control LQR en estado estacionario queda definida por:
K∞ = R−1BTP∞, (8.42)
y la senal de control resulta:
u(t) =−K∞x(t). (8.43)
En conclusion, el controlador lineal por realimentacion de estadosoptimo que minimiza elındice de desempeno:
J(u) = l ımt→∞
[∫ t
0[xT(t)QxT(t)+uT(t)Ru(t)
]
dt.
sujeto ax(t) = Ax(t)+Bu(t), x(0) = xo
satisface el teorema mas abajo.El objetivo es construir un controlador lineal por realimentacion de estados de la formau= −Kx que estabiliza al
sistema y minimiza elındice de desempenoJ(u). Denotar dicha ley de control lineal comou∗. Primero, asumimos queel controlador lineal por realimentacion de estadosoptimo existe tal que el sistema en lazo cerradooptimo
x= (A−BK)x
es asintoticamente estable. Esta suposicion implica que existe una funcion de LyapunovV = xTPx para el sistemaen lazo cerrado; esto es, para alguna matriz definida positiva P la derivada en funcion del tiempodV
dt evaluada en lastrayectorias del sistema en lazo cerrado es definida negativa.
Teorema 1.Si el controlador por realimentacion de estadosu∗ =−Kx es tal que
minu
(dVdt
+xTQx+uTRu
)
= 0, (8.44)
para algunV = xTPx, entonces el controlador esoptimo. ⋄Demostracion Teorema 1Podemos escribir la condicion del teorema como:
dVdt
∣∣∣∣u=u∗
+xTQx+u∗TRu∗ = 0.
Luego,dVdt
∣∣∣∣u=u∗
=−xTQx−u∗TRu∗.
Integrando ambos lados de la ecuacion resultante con respecto al tiempo desde 0 hasta∞, obtenemos
V(x(∞))−V(x(0) =−∫ ∞
0(xTQx+u∗TRu∗)dt.
Debido a la suposicion de que el sistema en lazo cerrado es asintoticamente estable,x(∞) = 0, y luego
V(x(0) = xTo Pxo =
∫ ∞
0(xTQx+u∗TRu∗)dt.
Entonces, hemos demostrado que si un controlador lineal porrealimentacion de estados satisface la suposicion delteorema, entonces el valor delındice de desempeno para tal controlador es

8.3 Regulador cuadratico lineal en estado estacionario - Horizonte infinito 123
J(u∗) = xTo Pxo.
Para demostrar que tal controlador es de hechooptimo, usamos una prueba por contradiccion. Asumimos que (8.44) secumple y queu∗ no esoptima. Supongase que ˜u resulta en un menor valor deJ, esto es,
J(u)< J(u∗).
De (8.44) tenemos quedVdt
∣∣∣∣u=u
+xTQx+ uTRu≥ 0,
esto es,dVdt
∣∣∣∣u=u≥−xTQx− uTRu.
Integrando la expresion arriba con respecto al tiempo de 0 a∞ resulta
V(x(0))≤∫ ∞
0(xTQx+ uTRu)dt
lo que implica queJ(u∗)≤ J(u),
lo que es una contradiccion, y la demostracion se ha completado. ⋄
Ejemplo 1
Considere el siguiente modelo de un sistema dinamico:
x= 2u1+2u2, x(0) = 3,
asi como elındice de desempeno asociado
J =∫ ∞
0(x2+ ru2
1+ ru22)dt,
donder > 0 es un parametro.
1. Primero encontramos las solucion de ARE correspondiente al controlador lineal por realimentacion de estadosoptimo. Tenemos
A= 0, B=[
2 2], Q= 1, R= rI2.
La ARE para este problema es
0= ATP+PA+Q−PBR−1BTP= 1− 8r
p2,
cuya solucion es
p=
√r8.
2. Ahora escribimos el sistema en lazo cerrado que se obtieneusando el controladoroptimo. El controladoroptimotienen la forma
u=−R−1BTPx=− 1√2r
[11
]
x.
Entonces, el sistema en lazo cerradooptimo es descrito por
x=[
2 2]u=− 4√
2rx.

124 8 ControlOptimo
3. Finalmente, encontramos el valor deJ para el sistema en lazo cerradooptimo. Tenemos que
J = x(0)TPx(0) =92
√r2.
Ejemplo integrador doble con LQR en estado estacionario
Considere un integrador doble descrito por la ecuacion espacio de estado:
x(t) =
[0 10 0
]
x(t)+
[01
]
u(t)
El controlador tiene que minimizar el siguienteındice de desempeno:
J =∫ ∞
0
[xT(t)Qx(t)+ρu2(t)
]dt
Aqui las matrices han sido seleccionadas como:
Q=
[rp 00 rv
]
,
ρ > 0,
donderp y rv son los pesos de posicion y velocidad respectivamente. Con los valores dados la ecuacion de Riccatialgebraica resulta en las siguientes ecuaciones acopladas:
0 = rp− 1ρ p2
12
0 = p11− 1ρ p12p22
0 = rv+2p12− 1ρ p2
22
Aqui, P =
[p11 p12
p12 p22
]
, es la solucion de la ARE. Resolviendo estas ecuaciones algebraicas se obtiene la solucion
definida positivaunica:p11 =
√rp√
2ρ√rpρ + rvρp12 =
√rpρ
p22 =√
2ρ√rpρ + rvρ
El controlador resulta en el control por realimentacion de estados con la senal de control:
u(t) =−K∞x(t) =−(R−1BTP∞)x(t)
=−[√
rp
ρ
√
2√
rp
ρ+
rv
ρ
]
x(t)
Se observa que la ganancia de control se incrementa a medida que los pesos de los estados se incrementan, en otraspalabras,rp y rv se incrementan en comparacion al peso de la senal de control. La ecuacion caracterıstic del sistema enlazo cerrado puede ser encontrada como:
s2+
√
2√
rp
ρ+
rv
ρs+
rp
ρ= 0
La frecuencia natural correspondiente al sistema en lazo cerradoω y el factor de amortiguamientoζ son calculadoscomo:
ω = 4
√rp
ρ

8.3 Regulador cuadratico lineal en estado estacionario - Horizonte infinito 125
ζ =1√2
√
1+rv
2√ρ√rp
Paraρ = 1, sirv = 0 los polos en lazo cerrado tienen un factor de amortiguamiento de 1/√
2≈ 0,71. El “root locus”como funcion de las ponderaciones se observa en la Fig. (8.5), donderp varia desde 0 hasta 10. Para este sistema enparticular se observa que el factor de amortiguamiento de los polos en lazo cerrado siempre seran mayores que 0.71para elementos de la matriz de ponderacion positivos.
8.3.2. Resolviendo la ARE usando el metodo del autovector
A continuacion presentamos un metodo para resolver la ARE referido como el metodo del autovector. Comenzamosrepresentando la ARE de la forma
[P −In
][
A −BR−1BT
−Q −AT
][InP
]
= 0. (8.45)
La matriz 2n×2n en la mitad es denominada dematriz Hamiltoniana. usamos el sımboloH para denotar a la matrizHamiltoniana, esto es,
H =
[A −BR−1BT
−Q −AT
]
.
Entonces, la ARE puede ser representada como
[P −In
]H
[InP
]
= 0
Si premultiplicamos la ecuacion arriba porX−1 y luego postmultiplicamos esta porX, dondeX es una matriz nosingularn×n,
[X−1P −X−1
]H
[X
PX
]
= 0. (8.46)
Observar que si pudiesemos encontrar matricesX y PX tal que
H
[X
PX
]
=
[X
PX
]
Λ ,
luego la ecuacion (8.46) resulta en[
X−1P −X−1][
XPX
]
Λ = 0.
–2 –1.5 –1 –0.5 0 0.5 1–1.5
–1
–0.5
0
1
1.5
0.5
2 1 0.5rv
= 5 0.1 0
Figura 8.5 Root-locus del sistema integrador doble con LQR en estado estacionario para una variacion derp.

126 8 ControlOptimo
Luego hemos reducido el problema de resolver la ARE a aquel enel que construimos matricesX y PX apropiadas.Continuando, seavi el autovector deH y seasi el autovalor correspondiente; entonces
Hvi = sivi .
Si asumimos queH tiene al menosn autovalores reales distintos entre sus 2n autovalores. (Los resultados obtenidospueden ser generalizados para cuando los autovalores deH son complejos o iguales.) Entonces, podemos escribir
H[
v1 v2 ... vn]=[
v1 v2 ... vn]
s1 0 ... 00 s2 ... 0...
......
0 0 ... sn
.
Sea [X
PX
]
=[
v1 v2 ... vn]
y
Λ =
s1 0 ... 00 s2 ... 0...
......
0 0 ... sn
.
La seleccion deX y PX constituye una posible solucion de la ecuacion
[X−1P −X−1
][
XPX
]
Λ = 0.
Para construirP, particionamos la matriz de autovectores[
v1 v2 ... vn]
de orden 2n×n en dos submatrices de ordenn×n como sigue
[v1 v2 ... vn
]=
[WZ
]
.
Luego,[
XPX
]
=
[WZ
]
.
TomandoX =W y PX = Z y asumiendo queW es invertible, obtenemos
P= ZW−1. (8.47)
Ahora tenemos que elegir que conjunto den autovalores elegir, dentro de todos los autovalores deH, para podercontruirP. En el caso en que los 2n autovalores deH son diferentes, el numero de matricesP generadas con el metododescrito arriba son
(2n)!(n!)2 .
SeaQ = CTC una factorizacion de rango completo deQ. Del Teorema 3 de Kucera (ver referencias al final) seconcluye que la matriz HamiltonianaH tienen autovalores en el semiplano complejo izquierdo yn en el semiplanocomplejo derecho si y solo si el sistema como definido en (1) es estabilizable y detectable. La matrizP que nosotrosbuscamos corresponde a los autovalores asintoticamente estables deH. ConP construido como deseado, tenemos elsiguiente resultado.
Teorema 2.Los polos del sistema en lazo cerrado
x(t) = (A−BR−1BTP)x(t)
son aquellos autovalores deH que tienen parte real negativa. ⋄

8.3 Regulador cuadratico lineal en estado estacionario - Horizonte infinito 127
Demostracion Siendo que[
v1 v2 ... vn]=
[WZ
]
, podemos escribir
[A −BR−1BT
−Q −AT
][WZ
]
=
[WZ
]
Λ .
Realizando las multiplicaciones apropiadas de bloques de matricesn×n resulta
AW−BR−1BTZ =WΛ ,
oA−BR−1BTZW−1 = A−BR−1BTP=WΛW−1,
dado queP= ZW−1. Entonces, la matrizA−BR−1BTP es similar a la matrizΛ cuyos autovalores son los autovaloresasintoticamente estables deH. Luego, la demostracion ha sido completada. ⋄
Ejemplo 1
Considere el siguiente modelo de un sistema dinamico
x= 2x+u,
asi como elındice de desempeno asociado
J =∫ ∞
0(x2+ ru2)dt.
Encuentre el valor der tal que el sistema en lazo cerradooptimo tenga un polo en−3.
1. Formamos la matriz Hamiltoniana asociada
H =
[A −BR−1BT
−Q −AT
]
=
[2 −1
r−1 −2
]
.
2. La ecuacion caracterıstica deH es
det(sI2−H) = s2−4− 1r= 0.
Luego,
r =15
resulta en el sistema en lazo cerradooptimo teniendo su polo localizado en−3.
Ejemplo 2
Considere un modelo simple de un robot manipulador como mostrado en la Fig.??. El movimiento del brazodel robot es controlado por un motor DC a traves de un engranaje. El motor DC es controlado por armadura y sufigura esquematica es presentada en la Fig. 8.7. Asumimos que el momento deinercia del motor es despreciable encomparacion con el del brazo del robot. Modelamos el brazo como una masapuntualm ubicada en el extremo finalde la barra (sin masa) de longitudl . Entonces el momento de inercia del brazoIb = ml2. Asumimos que el tren deengranajes no tiene juego, y que todos los ejes conectores son rıgidos. Como podemos ver de la Fig. 8.6, la rotaciondel brazo en sentido contrario a las agujas del reloj es definida como positiva, y la rotacion siguiendo las agujas delreloj es considerada como negativa; mientras que la rotacion del eje del motor en sentido contrario a las agujas delreloj es definida como negativa, y la rotacion del eje siguiendo las agujas del reloj es definida como positiva. El torqueentregado por el motor es
Tm = Kmia,
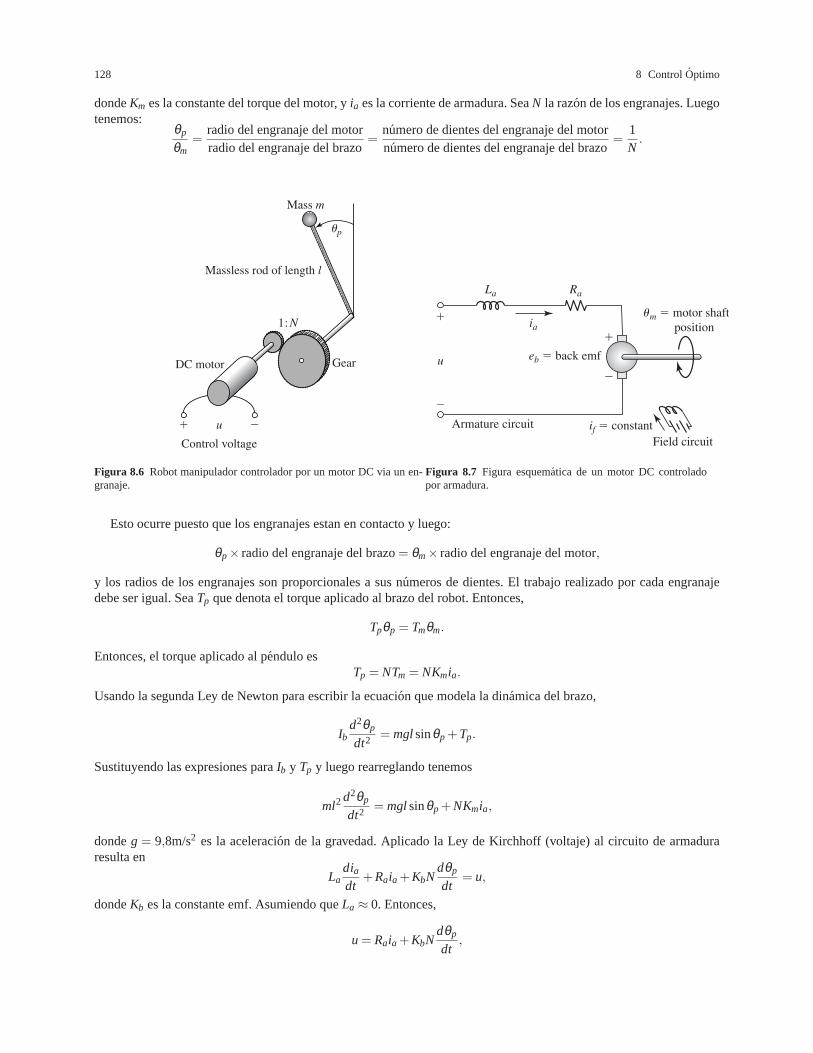
128 8 ControlOptimo
dondeKm es la constante del torque del motor, yia es la corriente de armadura. SeaN la razon de los engranajes. Luegotenemos:
θp
θm=
radio del engranaje del motorradio del engranaje del brazo
=numero de dientes del engranaje del motornumero de dientes del engranaje del brazo
=1N.
Gear
1:N
Massless rod of length l
p
Mass m
DC motor
Control voltage
u
Figura 8.6 Robot manipulador controlador por un motor DC via un en-granaje.
RaLa
if constant
eb back emf
m motor shaft
position
Field circuit
Armature circuit
u
ia
Figura 8.7 Figura esquematica de un motor DC controladopor armadura.
Esto ocurre puesto que los engranajes estan en contacto y luego:
θp× radio del engranaje del brazo= θm× radio del engranaje del motor,
y los radios de los engranajes son proporcionales a sus numeros de dientes. El trabajo realizado por cada engranajedebe ser igual. SeaTp que denota el torque aplicado al brazo del robot. Entonces,
Tpθp = Tmθm.
Entonces, el torque aplicado al pendulo esTp = NTm = NKmia.
Usando la segunda Ley de Newton para escribir la ecuacion que modela la dinamica del brazo,
Ibd2θp
dt2= mglsinθp+Tp.
Sustituyendo las expresiones paraIb y Tp y luego rearreglando tenemos
ml2d2θp
dt2= mglsinθp+NKmia,
dondeg = 9,8m/s2 es la aceleracion de la gravedad. Aplicado la Ley de Kirchhoff (voltaje) al circuito de armaduraresulta en
Ladiadt
+Raia+KbNdθp
dt= u,
dondeKb es la constante emf. Asumiendo queLa≈ 0. Entonces,
u= Raia+KbNdθp
dt,

8.3 Regulador cuadratico lineal en estado estacionario - Horizonte infinito 129
A continuacion calculamosia de la expresion anterior y sustituimos el resultado en la ecuacion de movimiento paraobtener:
ml2d2θp
dt2= mglsinθp+NKm
(
uRa− KbN dθp
dt
Ra
)
.
Ahora podemos construir el modelo de espacio de estados parael robot de un brazo. Escogiendo los siguientes estadosy variables de salida:
x1 = θp, x2 =dθp
dt= ωp, y y= x1.
Entonces, obtenemos el siguiente modelo de espacio de estados simple del robot manipulador:
[x1
x2
]
=
[
x2gl sinx1− KbKmN2
ml2Rax2+
NKmml2Ra
u
]
y= x1.
Parametros razonables para el robot son:l = 1m, m= 1kg, N = 10, Km = 0,1Nm/A, Kb = 0,1Vsec/rad,Ra = 1Ω .Usando los valores de los parametros el modelo del robot toma la siguiente forma:
[x1
x2
]
=
[x2
9,8sinx1−x2+u
]
y= x1.
Respuestas en el tiempo para las trayectorias de estado del sistema no lineal sin control,u = 0, son mostrados enla Fig. 8.8 para las condiciones inicialesx1(0) = 1 y x2(0) = 0. Un plano de fase del sistema no lineal sin control esmostrado en la Fig. 8.9. El modelo linealizado alrededor dex= 0, u= 0 tiene la forma
ddt
∆x =
[0 1
9,8 −1
]
∆x+
[01
]
∆u,
∆y =[
1 0]
∆x.
0 2 4 6 8 10
Time (sec)
5
4
3
2
1
0
1
2
3
x1,x
2
x1
x2
Figure 5.13Figura 8.8 Graficas dey= x1 y x2 versus tiempo para el sistema no linealsin control.
10
8
6
4
2
0
2
4
6
8
5 0 5 101010
x1
x2
Figura 8.9 Un plano de fase del sistema no lineal sin control.
En la Fig. 8.10 son mostradas las graficas dey= x1 y x2 versus tiempo para el sistema lineal sin control. Un planode fase del sistema linealizado es mostrado en la Fig. 8.11. Sea
J =∫ ∞
0(y2+u2)dt.

130 8 ControlOptimo
Encontraremos una ley de control lineal por realimentacion de estadosu=−kxque minimiceJ sujeto a las ecuacionesdadas por la representacion espacio de estados lineal. Tenemos
Q= cTc=
[1 00 0
]
y R= [1].
25
20
15
10
5
00 10.2 0.4 0.6 0.8
x1,x
2
Time (sec)
x1
x2
Figura 8.10 Graficas dey= x1 y x2 versus tiempo para el sistema lineal-izado sin control.
10
x2
x1
8
6
4
2
0
2
4
6
8
1010 5 0 5 10
Figura 8.11 Un plano de fase del sistema linealizado sin con-trol.
Resolviendo la ecuacion de Riccati, se define la matriz Hamiltoniana asociada como
H =
[A −BR−1BT
−Q −AT
]
=
0 1 0 09,8 −1 0 −1−1 0 0 −9,80 0 −1 1
,
y calculando los autovalores y autovectores deH tenemos que
H
−0,3443−0,0485 0,2604 0,0496−0,9298−0,1770−0,9499−0,1339−0,1124−0,9196 0,1691 0,95550,0661 0,3473 0,0364 0,2582
=
−0,3443−0,0485 0,2604 0,0496−0,9298−0,1770−0,9499−0,1339−0,1124−0,9196 0,1691 0,95550,0661 0,3473 0,0364 0,2582
2,7003 0 0 00 3,6481 0 00 0 −3,6481 00 0 0 −2,7003
.
Identificando los autovectores correspondientes a los autovalores con parte real negativa se puede definir
W =
[0,2604 0,0496−0,9499−0,1339
]
y Z =
[0,1691 0,95550,0364 0,2582
]
,
luego sabiendo queP= ZW−1 se obtiene
P=
[72,3371 19,650919,6509 5,3484
]
.
Entonces:k=
[19,6509 5,3484
],
y
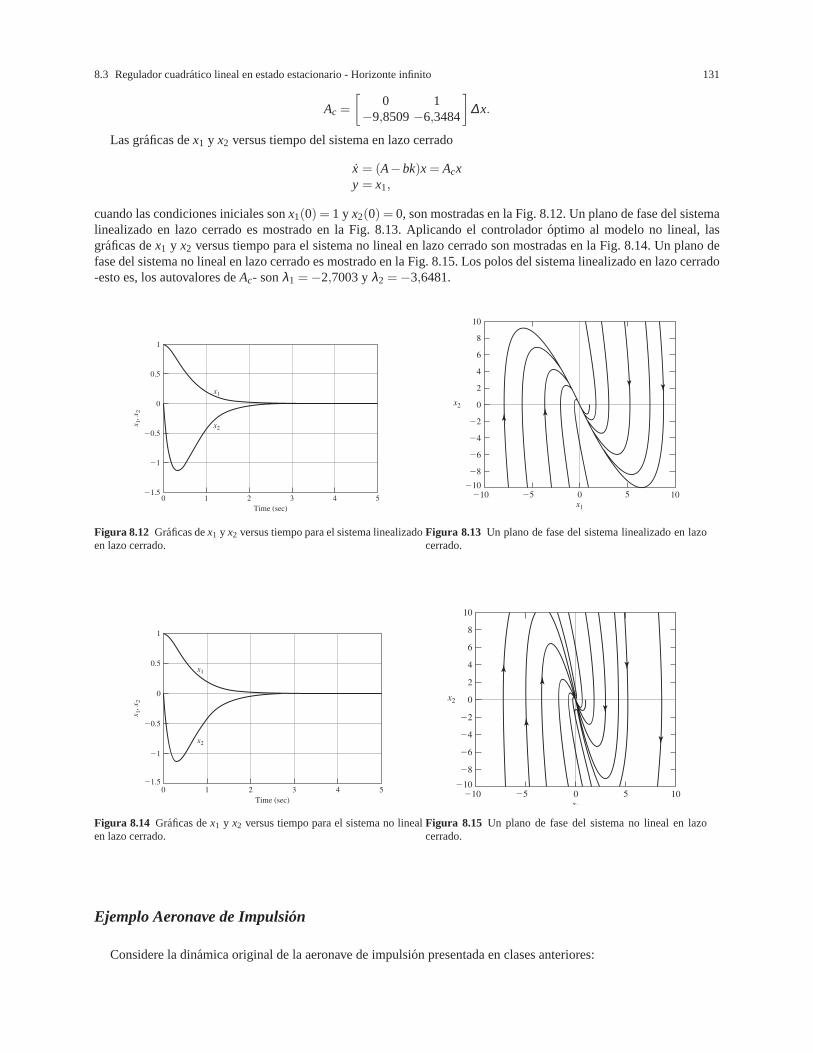
8.3 Regulador cuadratico lineal en estado estacionario - Horizonte infinito 131
Ac =
[0 1
−9,8509−6,3484
]
∆x.
Las graficas dex1 y x2 versus tiempo del sistema en lazo cerrado
x = (A−bk)x= Acxy = x1,
cuando las condiciones iniciales sonx1(0) = 1 y x2(0) = 0, son mostradas en la Fig. 8.12. Un plano de fase del sistemalinealizado en lazo cerrado es mostrado en la Fig. 8.13. Aplicando el controladoroptimo al modelo no lineal, lasgraficas dex1 y x2 versus tiempo para el sistema no lineal en lazo cerrado son mostradas en la Fig. 8.14. Un plano defase del sistema no lineal en lazo cerrado es mostrado en la Fig. 8.15. Los polos del sistema linealizado en lazo cerrado-esto es, los autovalores deAc- sonλ1 =−2,7003 yλ2 =−3,6481.
1
0.5
0
0 1 2
Time (sec)
x1,x 2
x1
x2
3 4
0.5
1
1.55
Figura 8.12 Graficas dex1 y x2 versus tiempo para el sistema linealizadoen lazo cerrado.
10
x2
x1
8
6
4
2
0
2
4
6
8
1010 105 0 5
A phase portrait of the linear closedloop system of Example 5.13.
Figura 8.13 Un plano de fase del sistema linealizado en lazocerrado.
x1,x 2
x1
x2
0
1
0.5
0.5
1
1.50 1 2
Time (sec)
3 4 5
Figura 8.14 Graficas dex1 y x2 versus tiempo para el sistema no linealen lazo cerrado.
x2
x1
10
8
6
4
2
0
2
4
6
8
1010 105 0 5
Figura 8.15 Un plano de fase del sistema no lineal en lazocerrado.
Ejemplo Aeronave de Impulsion
Considere la dinamica original de la aeronave de impulsion presentada en clases anteriores:

132 8 ControlOptimo
dzdt
=
z4
z5
z6
−gsinθ − cmz4
−gcosθ − cmz5
0
+
000
1m cosθF1− 1
m sinθF21m sinθF1+
1m cosθF2
rJF1
.
Los parametros del sistema sonm= 4kg,J = 0,0475kgm2, r = 0,25m,g= 9,8m/s2, c= 0,05Ns/m, que correspondena un modelo escalado del sistema. El punto de equilibrio parael sistema esta dado porF1 = 0, F2 = mg y ze =(xe,ye,0,0,0,0). Calculamos el sistema linealizado:
A=
0 0 0 1 0 00 0 0 0 1 00 0 0 0 0 10 0−g −c/m 0 00 0 0 0 −c/m 00 0 0 0 0 0
, B=
0 00 00 01m 00 1
mrJ 0
, C=
[1 0 0 0 0 00 1 0 0 0 0
]
, D =
[0 00 0
]
.
Haciendoz= z−ze y v= u−ue, el sistema linealizado esta dado por:
dzdt
= Az+Bv,
y =Cz.
Se puede verificar que el sistema es alcanzable.Para calcular el regulador cuadratico lineal para el sistema, escribimos la funcion costo como:
J =∫ ∞
0(zTQz+vTRv)dt,
dondez= z−ze y v= u−ue representan las coordenadas locales en torno al punto de equilibrio (ze,ue). Comenzamoscon matrices diagonales para los costos del estado y la entrada:
Q= I6×6, R= I2×2.
Luego la ley de control de la formav = −Kz sera usada para derivar la ley de control en terminos de las variablesoriginales:
u= v+ue =−K(z−ze)+ue.
Como especificado en clases anteriores, los puntos de equilibrio corresponden aue = (0,mg) y ze = (xe,ye,0,0,0,0).La respuesta del controlador a un cambio de la funcion escalon para la posicion deseada es mostrada en la Fig. 8.16a.La respuesta puede ser afinada cambiando los pesos en la funcion de costo. La Fig. 8.16b muestra la respuesta en ladireccion x para diferentes selecciones del pesoρ , siendo queR= ρ I2.
6.3. STATE FEEDBACK DESIGN 193
0 2 4 6 8 100
0.5
1
Time t [s]
Positionx,
y[m
]
xy
(a) Step response in x and y
0 2 4 6 8 100
0.5
1
Time t [s]
Positionx[m
]
ρ
(b) Effect of control weight ρ
Figure 6.12: Step response for a vectored thrust aircraft. The plot in (a) shows the x and ypositions of the aircraft when it is commanded to move 1 m in each direction. In (b) the xmotion is shown for control weights 1, 102, 104. A higher weight of the input term inthe cost function causes a more sluggish response.
level. Since other processes may be running on the server, the web server mustadjust its parameters in response to changes in the load.
A block diagram for the control system is shown in Figure 6.13. We focus onthe special case where we wish to control only the processor load using both the
and parameters. We also include a “disturbance” onthemeasured load that represents the use of the processing cycles by other processesrunning on the server. The system has the same basic structure as the generic controlsystem in Figure 6.5, with the variation that the disturbance enters after the processdynamics.
The dynamics of the system are given by a set of difference equations of theform
x[k 1] Ax[k] Bu[k] ycpu[k] Ccpux[k] dcpu[k]
where x xcpu xmem is the state, u uka umc is the input, dcpu is the processingload from other processes on the computer and ycpu is the total processor load.
We choose our controller to be a state feedback controller of the form
u K ycpuxmem
krrcpu
Feedback
rcpu u
d
yPrecompensation Controller
kre
C
1
Server
P
Figure 6.13: Feedback control of a web server. The controller sets the values of the webserver parameters based on the difference between the nominal parameters (determined bykrr ) and the current load ycpu. The disturbance d represents the load due to other processesrunning on the server. Note that the measurement is taken after the disturbance so that wemeasure the total load on the server.
Figura 8.16 Respuesta al escalon de una aeronave de impulsion. La Fig.a muestra las posiciones “x” e “y” de la aeronave cuando se lecomanda moverse 1m en cada direccion. En Fig.b se muestra el movimientox variando los pesos de controlρ = 1,102,104. Un peso masgrande en el termino de control de la funcion costo causa una respuesa mas lenta.

8.3 Regulador cuadratico lineal en estado estacionario - Horizonte infinito 133
8.3.3. Propiedades de robustez del diseno LQR
Un sistema de control que usa el regulador cuadratico lineal presenta las siguientes caracterısticas de robustez. Estoes, los margenes de estabilidad de la matriz de funciones de transferencia en lazoL(s) = K(sI−A)−1B (equivalente-mente, las condiciones para que|1+L(iω)|> 1) estan dados por:
Margen de ganancia (GM):12 < GM < 1.Margen de fase (PM): PM> 60o.
La Fig. 8.17 presenta el diagrama de Nyquist de la funcion de transferencia de lazo,L(s), para un modelo simplifi-cado de un satelite.
A=
[0 10 0
]
, B=
[01
]
, C=[
1 0], D = 0.
Figura 8.17 Diagram de Nyquist mostrando margenes de estabilidad del LQR.
8.3.4. Regla de Bryson para seleccion de matricesQ y R
Si se conocen los valores maximos de los estados finales, estados contınuos y entradas contınuas, luego se puedeaplicar la siguiente regla para la seleccion de matrices de ponderacion F , Q y R:
Fii =1
max([xi(T)]2)
Qii =1
(T− to)max([xi(t)]2)
Rj j =1
(T− to)max([ui(t)]2)
dondei = 1,2, ...,n y j = 1,2, ...,m. Si el tiempo no es importante en la aplicacion evaluada luego el intervalo de tiempoentre parentesis,(T− to), puede elegirse igual a 1. Los terminos fuera de la diagonal de las matrices de ponderacionpueden ser usados si existe interaccion entre los componentes de las entradas o estados.
Fuente: Capıtulo 5 del libroLinear Systems Controlde Elbert Hendricks et al, Springer, 2008.Fuente: Capıtulo 3 del libroOptimal Controlde Lewis y Syrmos, Wiley, 1995.Fuente: Capıtulo 5 del libroSystems and Controlde Stanislaw H. Zak, Oxford University Press, 2003.

134 8 ControlOptimo
Fuente: Capıtulo 5 del libroLinear Systems Control - Deterministic and Stochastic Methodsde Elbert Hendricks,Ole Jannerup y Paul Sorensen, Springer, 2008.
Fuente: Capıtulo 6 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astrom yRichard M. Murray.

Capıtulo 9Estimacion Optima
9.1. Filtro de Kalman-Bucy
El regulador cuadratico lineal (con horizonte infinito) es una ley de control lineal por realimentacion de estadosu=−Kx para el sistema:
x= Ax+Bu, x(0) = xo
que minimiza la funcion de costo cuadratica:
J =∫ ∞
0(x(t)TQx(t)+u(t)TRu(t))dt.
La ley de control es llamada “optima” con respecto a la funcion de costoJ.Uno se podrıa preguntar si existe una tecnica de diseno optimo para un estimador de estados. Esto es, ¿sera que
existe un abordaje para disenar observadores que sea equivalente, en algun sentido, al regulador cuadratico lineal? Ası,dado el sistema observable:
x = Axy =Cx,
se podrıa definir el sistema dual:Θ = ATΘ +CTΓ ,
y disenar un controlador LQR para minimizar la funcion de costo cuadratica:∫ ∞
0(Θ(t)TQΘ(t)+Γ (t)TRΓ (t))dt.
Sin embargo, aun no queda claro como se podrıa penalizarΘ y Γ en la funcion de costo.A continuacion consideraremos un sistema lineal observable:
x = Ax+Bu+Gwy =Cx+v,
(9.1)
en el que la dinamica esta sujeta a disturbios aleatoriosw y medidas aleatoriasv. En paralelo al desarrollo del reguladorcuadratico lineal, Kalman examino el siguiente problema del estimadoroptimo: construir un observador de ordencompleto que minimice el efecto combinado de los disturbiosy el ruido, de tal forma que provea un estado “masprobable” del estado del sistema1. Resolver este problema requiere de algo de informacion acerca de los procesosaleatorios. Si los procesos son demedia cero, procesos deruido blanco Gaussiano, luego el problema de diseno delestimadoroptimo se convierte en el analogo perfecto del problema de diseno del control LQR.
Primero revisaremos algo de teorıa de probabilidad.
1 De hecho, Kalman enuncio el problema original para sistemas discretos. La version contınua es atribuida a Kalman y a Bucy.
135

136 9 Estimacion Optima
9.1.1. Teorıa de probabilidad
9.1.1.1. Escalares y vectores aleatorios
Considere un variable aleatoria escalarz con fz(ζ ) representando sufuncion de densidad de probabilidad, definidatal que:
∫ ∞
−∞fz(ζ )dζ = 1.
Entonces,fz(ζ ) provee la probabilidad de que el valor dezeste en alguna region diferencialdζ centrada enζ . Una delas funciones de densidad de probabilidad es la funcion de densidad de probabilidad Gaussiana, ver Fig. 9.1:
fz(ζ ) =1
σ√
2πexp
(
− (ζ − ζ )2σ2
)
, (9.2)
dondeσ > 0 es llamada ladesviacion estandar.
Figura 9.1 Funcion densidad de probabiliadd Gaussiana
Dada una funcion de densidad de probabilidad, lamediao valor esperadode una funciong(z) es:
Eg(z)=∫ ∞
∞g(ζ ) fz(ζ )dζ .
Por ejemplo, el valor medio dezes:
z= Ez=∫ ∞
∞ζ fz(ζ )dζ .
La varianzadezesE(z− z)2.
La varianza indica la probabilidad de que el numero aleatorio esta cerca del valor medio. Una pequena varianza indicaque la media es un buen estimado del numero, mientras que una varianza grande indica que el valor real puede serbastante diferente de la media. Para la funcion de densidad de probabilidad Gaussiana (9.2), uno puede calcular quela media esζ y la varianza esσ2. Notese que, a medida queσ → 0, la funcion de densidad Gaussiana se aproxima alimpulso unitario en la media; luego se tiene quez= z= ζ .
Uno puede extender el concepto de variable escalar aleatoria a un vector de variables aleatorias, digamosz∈ Rn.
En este caso, existe una funcion de densidad de probabilidad escalarfz(ζ ) den variables aleatoriasζ = [ζ1, ...,ζn]T tal
que:∫ ∞
−∞...∫ ∞
−∞fz(ζ )dζ1...dζn = 1.
La funcion fz(ζ ) provee la probabilidad de quez se encuentra es algun hipercubo diferencialdζ1...dζn con centro enζ . La funcion de densidad de probabilidad Gaussiana para un vector de variables aleatorias es:
fz(ζ ) =1
√
(2π)n|Pζ |exp
(
−12(ζ − ζ )TP−1
ζ (ζ − ζ ))
9.1 Filtro de Kalman-Bucy 137
dondePζ ≥ 0. El valor esperado de cualquier vector o matriz de funciones g(z) es
Eg(z)=∫ ∞
−∞...∫ ∞
−∞g(ζ ) fz(ζ )dζ1...dζn.
Por ejemplo, la media dezes
z= Ez=∫ ∞
−∞...∫ ∞
−∞ζ fz(ζ )dζ1...dζn.
La covarianzadezes la matrizn×nE(z− z)(z− z)T.
Para la funcion de densidad Gaussiana, la media es ¯z= ζ y la covarianza esPζ .
9.1.1.2. Procesos aleatorios
Si la variable aleatoria depende del tiempo, esto esz(t), entonces es llamadaproceso aleatorio. En general, la funcionde densidad de probabilidad podrıa tambien depender del tiempo,fz(ζ , t), tal que la media y covarianza cambiana medida que el proceso evoluciona. Si la funcion de densidad de probabilidad es constante; esto es, la media ycovarianza permanecen constantes, el proceso es llamadoestacionario. Notese que el termino “estacionario” se refieresolo a la funcion de densidad de probabilidad, y de ahı a los parametros probabilısticos tales como media y covarianza.El estadoz, por otro lado, puede y generalmente si cambia en funcion del tiempo.
Dado que la variable aleatoriaz(t) cambia en el tiempo, uno puede cuestionar si su valor en un instante dado deltiempo se correlaciona con su valor en otro instante. Para cuantificar la pregunta, se define laautocorrelacion dez(t)en el tiempoτ como
Rz(τ) = Ez(t + τ)zT(t).La funcion de autocorrelacion resulta de gran utilidad para encontrar patrones repetitivos dentro de una senal, comopor ejemplo, la periodicidad de una senal enmascarada bajo el ruido.
SiRz(τ) = Pδ (τ),
dondeP es una matriz constante yδ (·) es la funcion delta de Dirac, entonces el valor dez(t) no esta correlacionadocon el valor dez(t + τ) para cualquier tiempoτ 6= 0. Tal proceso aleatorio es llamadoruido blanco. La razon deeste nombre es en referencia al contenido de energia del proceso siendo uniformemente distribuido sobre todas lasfrecuencias. (Recuerde que el color blanco corresponde a laluz reflejada en todas las longitudes de onda). Siz(t) esun proceso de media cero, entoncesPδ (0) es la covarianza del proceso; la matrizP es llamadamatriz de densidadespectralo simplementematriz de covarianza.
9.1.1.3. Procesos aleatorios conjuntos
Ahora supongamos que existen dos procesos de vectores aleatorios z1(t) y z2(t). Adicionalmente a sus propiasfunciones de densidad de probabilidad, estos dos procesos tienen unafuncion de densidad de probabilidad conjuntadenotada porf12(ζ1,ζ2, t1, t2). Si f12 depende det1 y t2 solo a traves de su diferencia,t1− t2, entonces los procesos sonllamados deestacionarios conjuntosy escribimosf12(ζ1,ζ2, t1− t2).
El valor esperado de una funcion (vector o matriz)g(z1,z2) es
Eg(z1(t1),z2(t2))=∫ ∞
−∞...∫ ∞
−∞
(∫ ∞
−∞...∫ ∞
−∞g(ζ1,ζ2) f12(ζ1,ζ2, t1− t2)dζ11...dζ1n
)
dζ21...dζ2n.
Un ejemplo dematriz de correlacion cruzadaes
Rz1z2(τ) = Ez1(t + τ)zT2 (t).
Los dos procesos se dice que sonortogonaleso no correlacionadossi Rz1z2(τ) = 0 para todoτ.

138 9 Estimacion Optima
9.1.2. Problema del observadoroptimo
Deseamos construir un termino de inyeccionΦ(y− y, t), tal que el estado estimado generado por el siguiente sistemaficticio:
˙x= Ax+Bu+Φ(y− y, t), (9.3)
converge al valor “mas probable” del estado verdaderox en el sentido que la siguiente medida de la covarianza delerror del estimacion sea minimizada:
J = tr(E(xxT)) = tr(P(t)),
donde P(t) = ExxT es la matriz de covarianza de ˜x. Aqui, x= x− x es el estimado del error y el operador tr(·) rep-resenta la “traza” de una matriz (la suma de los elementos de la diagonal). Asumiremos que la dinamica del estimador(9.3) es inicializada mediante la eleccion x(0) = Ex(0); se asume que la media es conocida.
Resulta que cuando la eleccion deΦ es lineal e invariante en el tiempo:
Φ(y− y, t) = L(y− y).
La dinamica del error de observacion resulta:
˙x = x− ˙x = (Ax+Bu+Gw)− (Ax+Bu+L(y− y))= (A−LC)x+Gw−Lv.
Note que el error de estimacion x en cualquier instante es debido solo al disturbio aleatoriow(t) y el ruido aleatoriov(t). Si estas dos senales aleatorias se desvanecen (y si ˆx(0) = x(0)), luego el error permanecerıa en cero por todo eltiempo.
Resolviendo la dinamica del error, siendo que el sistema es lineal, se encuentra que la solucion dex es:
x(t) = e(A−LC)t x(0)+∫ t
0e(A−LC)(t−τ)(Gw−Lv)dτ .
El primer terminoe(A−LC)t x(0) depende del estimado inicial de los estados y no es aleatorio. Tambien sabemos quesi A− LC es estable, luegoe(A−LC)t x(0)→ 0. Luego, para minimizar el error de estimacion esperado, necesitamosminimizar el error debido al segundo termino. Descomponiendo el estimado del error en dos terminos, uno que resultadel disturbio y otro del ruido:
x(t) =∫ t
0e(A−LC)(t−τ)(Gw−Lv)dτ
=∫ t
0e(A−LC)(t−τ)Gwdτ−
∫ t
0e(A−LC)(t−τ)Lvdτ = xw+ xv.
La funcion de costo usando ˜x= xv+ xw resulta
J = tr(E(xw+ xv)(xw+ xv)T).
Retornando con la definicion del problema del observadoroptimo, dada en la primera parte de esta clase, los procesosde disturbio y ruido son de media cero y Gaussianos (pero no necesariamente estacionarios):
Ev(t)= 0,
Ew(t)= 0,
Ev(t + τ)vT(t)=Vδ (τ),
Ew(t + τ)wT(t)=Wδ (τ),
que corresponden a las siguientes funciones de densidad de probabilidad,
f (v) =1
√
(2π)n|V|exp
(
−12
vTV−1v
)
,

9.1 Filtro de Kalman-Bucy 139
f (w) =1
√
(2π)n|W|exp
(
−12
vTW−1v
)
,
dondeV y W son las matrices de covarianza dev(t) y w(t) respectivamente. Si adicionalmente asumimos quev(t) yw(t) no son correlacionados; esto es:
Ev(t + τ)wT(t)= Ew(t + τ)vT(t)= 0.
Luego la funcion de costo en funcion de los componentes resultantes ˜xv y xw de x esta dada por:J = tr
(ExwxT
w+ xvxTv )= tr
(ExwxT
w)+ExvxTv )=
tr
(
E∫ t
0
∫ t
0e(A−LC)α Gw(t−α)wTGT(t−β )e(A−LC)T β dαdβ+E
∫ t
0
∫ t
0e(A−LC)α Lv(t−α)vTLT(t−β )e(A−LC)T β dαdβ
)
J = tr
(∫ t
0
∫ t
0e(A−LC)α(GWGT +LVLT)e(A−LC)T β δ (β −α)dαdβ
)
= tr
(∫ t
0e(A−LC)β (GWGT +LVLT)e(A−LC)T β dβ
)
Recordando el caso del LQR, la funcion objetivo es:
J =∫ t
0(xTQx+uTRu)dτ,
el sistema en lazo cerrado es descrito como:
x= Ax+Bu= (A−BK)x.
La respuesta en el tiempo es:x(t) = e(A−BK)tx(0).
Entonces el costo puede ser calculado como:
J =∫ t
0(xTQx+(−Kx)TR(Kx))dτ
=∫ t
0xT(Q+KTRK)xdτ
=∫ t
0(e(A−BK)τx(0))T(Q+KTRK)e(A−BK)τx(0)dτ
= x(0)T
(∫ t
0e(A−BK)T τ(Q+KTRK)e(A−BK)τdτ
)
x(0).
Y minimizarJ es equivalente al problema de minimizar:
∫ t
0e(A−BK)T τ(Q+KTRK)e(A−BK)τdτ .
Luego, minimizarJ para el observadoroptimo es equivalente al problema de minimizar:
J =∫ ∞
0(ΘTGWGTΘ +Γ TVΓ )dt,
sujeto a la dinamica:Θ = ATΘ +CTΓ .
Aqui, la matrizW representa la matriz de covarianza dew(t) y la matrizV representa la matriz de covarianza dev(t).Por definicion,W y V son definidas positiva.
Como ya sabemos de la teorıa LQR, la entrada de minimizacion hacia el sistema dual es
Γ =−LTΘ ,

140 9 Estimacion Optima
dondeLT =V−1CPT ,
y PT es la solucion unica semidefinida positiva de la ecuacion de Riccati algebraica:
AP+PAT −PCTV−1CP+GWGT = 0.
La ganancia del observador, definido arriba, minimiza la covarianza del error de estimacion. En un sentido cuantificable,la ganancia balancea entre el error de estimacion debido a la incertezas en la planta (representadas por el disturbiow(t)) y la incerteza de medida (representada por el ruido desconocido v(t)). Si la covarianza del disturbio es grandeen relacion a la covarianza del ruido, entonces la ganancia resultante del observadorL sera grande. Esto significa queel estado estimado dependera mas fuertemente del error de mediday− y. Por otro lado, si la covarianza del disturbioes pequena en relacion a la covarianza del ruido, entonces la ganancia del observadorG sera pequena. Notese, sinembargo, queL garantiza queA−LC sea Hurwitz.
El filtro de Kalman aplicado a procesos estocasticos contınuos en el tiempo se puede resumir en el siguiente teorema:Teorema 3.(Kalman-Bucy, 1961).El estimadoroptimo tiene la forma de un observador lineal:
dxdt
= Ax+Bu+L(y−Cx),
dondeL(t) = P(t)CTV−1 y P(t) = E(x(t)− x(t))(x(t)− x(t))T y satisface:
dPdt
= AP+PAT −PCTV−1CP+GWGT , P(0) = Ex(0)xT(0).
Cuando el sistema es estacionario y siP(t) converge, la ganancia del observador es constante:
L = PCTV−1 donde AP+PAT −PCTV−1CP+GWGT = 0.
⋄Nota: El filtro de Kalman fue originalmente elaborado para sistemas discretos, verOptimal Estimation of Dynamic
Systemsde John Crassidis y John Junkins, Capıtulo 5.
9.2. Control LQG
Regreso a los origenes del problema de controlH2:
x = Ax+Bu+wy =Cx+v,
dondew y v son procesos aleatorios Gaussianos con media cero y covarianzasW y V.El problema de control estocastico LQG consiste en:
encontrar el compensadorC(s) que minimiza
J = E∫ ∞
0[(y− r)TQy(y− r)+uTRu]dt.
Asumir por simplicidad que la referencia es cero,r = 0 (de otra forma, se traslada el estado apropiadamente).TeoremaEl compensadoroptimo tiene la forma
˙x = Ax+Bu+L(y−Cx)u = K(x−xd),

9.2 Control LQG 141
dondeL es la ganancia del observadoroptimo ignorando el controlador por realimentacion de estados yK es la gananciadel controlador por realimentacion de estados ignorando el disturbiow y ruidov.Esto es llamado elprincipio de separacion (para controlH2). ⋄
Nota: El compensadoroptimo simplificado viene a ser:
˙x = (A−LC)x+Bu+Lyu =−K(x−xd),
9.2.1. Ejemplo: Aeronave de impulsion
Considere la dinamica original de la aeronave de impulsion presentada en clases anteriores, escrita en la formaespacio de estados como:
dzdt
=
z4
z5
z6
−gsinθ − cmz4
−gcosθ − cmz5
0
+
000
1m cosθF1− 1
m sinθF21m sinθF1+
1m cosθF2
rJF1
.
Los parametros del sistema sonm= 4kg, J = 0,0475kgm2, r = 0,25m,g= 9,8m/s2, c= 0,05Ns/m, que correspondea un modelo escalado del sistema. El punto de equilibrio parael sistema esta dado porF1 = 0, F2 = mg y ze =(xe,ye,0,0,0,0). Para derivar el sistema linealizado cerca del punto de equilibrio, calculamos el sistema linealizado:
A=
0 0 0 1 0 00 0 0 0 1 00 0 0 0 0 10 0−g −c/m 0 00 0 0 0 −c/m 00 0 0 0 0 0
, B=
0 00 00 01m 00 1
mrJ 0
.
Haciendoz= z−ze y s= u−ue, el sistema linealizado esta dado por:
dzdt
= Az+Bs.
9.2.1.1. Observadoroptimo (Filtro de Kalman-Bucy)
Considerando solo la dinamica lateral del sistema, esto es, solo los subsistemas cuyos estados estan dados porz= (x,θ , x, θ). Para disenar el filtro de Kalman debemos incluir la descripcion de los procesos aleatorios de disturbioy ruido de medida. Entonces, aumentando el sistema para que tenga la forma
z= Az+Bs+w,y =Cz+v,
dondew representa la fuente de disturbio (modelada como un procesoGaussiano de media igual a cero) yv representael ruido de media (modelado como un proceso Gaussiano de media igual a cero). La matriz de salidaC corresponde auna sola senal medidax.
Para este ejemplo, escogemos que los disturbios de procesowi , i = 1, ...,n, son disturbios independientes con covar-ianza dada porWii = 0,1, Wi j = 0, i 6= j. El ruido de medida parax−xe es una variable aleatoria que modelamos conuna covarianzaV = 10−4.
SeaJF =
∫ ∞
0(ΘTWΘ +Γ TVΓ )dt.

142 9 Estimacion Optima
Encontraremos una (pseudo) ley de control lineal por realimentacion de estadosΓ =−LTΘ que minimiceJF sujeto alsistema dual
Θ = ATΘ +CTΓ .
Usando los parametros mencionados como indicado arriba, se puede calcular la ganancia de Kalman resultante.Resolviendo la ecuacion de Riccati, se define la matriz Hamiltoniana asociada como
H =
[AT −CTV−1C−W −A
]
=
0 0 0 0 −104 0 0 00 0 −9,8 0 0 0 0 01 0 −0,0125 0 0 0 0 00 1 0 0 0 0 0 0−0,1 0 0 0 0 0 −1 0
0 −0,1 0 0 0 0 0 −10 0 −0,1 0 0 9,8 0,0125 00 0 0 −0,1 0 0 0 0
.
Calculando los autovalores y autovectores deH, posteriormente identificando los autovectores correspondientes a losautovalores con parte real negativa, definiendoWF y ZF , y sabiendo quePF = ZFW−1
F se obtiene
P=
0,0037 −0,0047 0,0185 −0,0032−0,0047 0,0768 −0,1703 0,05980,0185 −0,1703 0,6390 −0,1170−0,0032 0,0598 −0,1170 0,1482
. (9.4)
Entonces
L =
37,0−46,9185−31,6
. (9.5)
El desempeno del estimador es mostrado en la Fig. 9.2(a). Observamos que a pesar de que el estimador convergea los estados del sistema, se presenta bastante sobreimpulso en los estados estimados, lo que puede llevar a un bajodesempeno en un sistema en lazo cerrado.
Para mejorar el desempeno del estimador, exploramos el impacto de aumentar una nueva senal medida. Suponiendoque en lugar de solo medir la posicion de salidax, tambien medimos la orientacion de la aeronaveθ . La matriz desalida resulta
y=
[1 0 0 00 1 0 0
]
z+
[v1
v2
]
,
y si asumimos quev1 y v2 son independientes fuentes de ruido, cada uno con covarianzaVi = 10−4, luego la matriz deganancias del estimadoroptimo resulta
L =
32,6 −0,150−0,150 32,6
32,7 −9,790,0033 31,6
. (9.6)
Estas ganancias proveen buena inmunidad al ruido y alto desempeno, como mostrado en la Fig. 9.2(b).
9.2.1.2. Regulador cuadratico lineal
Se puede verificar que el sistema es alcanzable. Luego, para calcular el regulador cuadratico lineal para el sistema,escribimos la funcion costo como:
J =∫ ∞
0(zTQz+sTRs)dt.
Comenzamos con matrices diagonales para los costos del estado y la entrada:

9.2 Control LQG 143218 CHAPTER 7. OUTPUT FEEDBACK
0 0.5 1 1.5 2−0.4
−0.3
−0.2
−0.1
0
0.1
Time t [s]
States
z i[m
ixed
units]
xθ
xdθd
(a) Position measurement only
0 0.5 1 1.5 2−0.4
−0.3
−0.2
−0.1
0
0.1
Time t [s]
States
z i[m
ixed
units]
xθ
xdθd
(b) Position and orientation
Figure 7.9: Kalman filter design for a vectored thrust aircraft. In the first design (a) onlythe lateral position of the aircraft is measured. Adding a direct measurement of the rollangle produces a much better observer (b). The initial condition for both simulations is0 1 0 0175 0 01 0 .
having covariance R 10 4. Using the same parameters as before, the resultingKalman gain is given by
L
37 046 918531 6
The performance of the estimator is shown in Figure 7.9a. We see that while theestimator converges to the system state, it contains significant overshoot in the stateestimate, which can lead to poor performance in a closed loop setting.
To improve the performance of the estimator, we explore the impact of adding anewoutputmeasurement. Suppose that instead ofmeasuring just the output positionx , we also measure the orientation of the aircraft . The output becomes
y 1 0 0 00 1 0 0 z 1
2
and ifwe assume that 1 and 2 are independent noise sources eachwith covarianceR i 10 4, then the optimal estimator gain matrix becomes
L
32 6 0 1500 150 32 632 7 9 790 0033 31 6
These gains provide good immunity to noise and high performance, as illustratedin Figure 7.9b.
Figura 9.2 Diseno del filtro de Kalman para la aeronave de impulsion. En el primer diseno (a) solo se mide la posicion lateral de laaeronave. Aumentando una medida directa delangulo de rotacion produce un mejor observador (b). Las condiciones inicialespara ambassimulaciones son(0,1,0,0175,0,01,0)
Q=
1 0 0 00 1 0 00 0 1 00 0 0 1
, R= 100.
Usando estas matrices, se puede calcular la ganancia del regulador por realimentacion de estados resultante. Resolvien-do la ecuacion de Riccati, se define la matriz Hamiltoniana asociada como
H =
[A −BR−1BT
−Q −AT
]
=
0 0 1 0 0 0 0 00 0 0 1 0 0 0 00 −9,8 −0,0125 0 0 0 −0,00006−0,00130 0 0 0 0 0 −0,0013 −0,0277−1 0 0 0 0 0 0 00 −1 0 0 0 0 9,8 00 0 −1 0 −1 0 0,0125 00 0 0 −1 0 −1 0 0
.
Calculando los autovalores y autovectores deH, posteriormente identificando los autovectores correspondientes a losautovalores con parte real negativa, definiendoWK y ZK , y sabiendo quePK = ZKW−1
K se obtiene
K =[−0,316 9,198−0,824 5,955
]. (9.7)
Luego la ley de control de la formas= −Kz sera usada para derivar la ley de control en terminos de las variablesoriginales:
u= s+ue =−K(z−ze)+ue.
Como especificado en clases anteriores, los puntos de equilibrio corresponden aue = 0 y ze = (xe,0,0,0).
9.2.1.3. Control LQG
El compensadoroptimo LQG resulta:
˙z=
32,6 0,15 1 00,15 −32,6 0 1−32,7 −0,01−0,0125 0−0,0033−31,6 0 0
z+
00
0,255,263
u+
32,6 −0,150−0,150 32,6
32,7 −9,790,0033 31,6
y
u =−[−0,316 9,198−0,824 5,955
]z+Kze,
09.

144 9 Estimacion Optima
9.2.2. Compensadoroptimo LQG podrıa resultar en un sistema en lazo cerrado inestable
Considere el problema LQG con la siguiente dinamica:[
x1
x2
]
=
[1 10 1
][x1
x2
]
+
[01
]
u+
[11
]
w
y =
[10
][x1
x2
]
+v(9.8)
El vectorx=[
x1 x2]T
es el vector de estados,u es la entrada de control,y es la salida medida yw y v son los ruidosblancos Gaussianos independientes con intensidadesσ ≤ 0 y 1 respectivamente. Elındice de desempeno asociadoesta dado por:
J = E
l ımT→∞
1T
∫ T
0(ρ(x1+x2)
2+u2)dt
donde E(·) es el operador valor esperado yρ es un parametro real no negativo.Extrayendo las siguientes matrices del problema con el fin desimplificar calculos posteriores:
A=
[1 10 1
]
, B1 =
[01
]
, B2 =
[11
]
, B3 = 0
C1 =[
1 0], D11 = 0, D12 = 0, D13 = 1
9.2.2.1. LQR
El problema de control LQR queda definido por la minimizacion del siguiente funcional de desempeno:
JLQR=∫ ∞
0(ρ(x1+x2)
2+u2)dt
siendo que:[
x1
x2
]
= A
[x1
x2
]
+B1u
La ecuacion de Riccati que resuelve el problema de control LQR esta dada por:
PA+ATP−PBR−1BTP+Q= 0
PA+ATP−PB1
[1 00 1
]
BT1 P+ρ
[1 11 1
]
= 0
[p11 p12
p12 p22
][1 10 1
]
+
[1 01 1
][p11 p12
p12 p22
]
−[
p11 p12
p12 p22
][01
][
0 1][
p11 p12
p12 p22
]
+ρ[
1 11 1
]
= 0
[2p11− p2
12+ρ p11+2p12− p12p22+ρp11+2p12− p12p22+ρ 2p12+2p22− p2
22+ρ
]
=
[0 00 0
]
Resolviendo para cada elemento de la matrizP se obtiene:
P= α[
2 11 1
]
dondeα = 2+√
4+ρ. Luego la ganancia del LQR es:
K = R−1BT1 P= α
[1 1]

9.2 Control LQG 145
9.2.2.2. Filtro de Kalman
El problema del observadoroptimo queda definido por la minimizacion del siguiente funcional de desempeno:
JFK =∫ ∞
0(θ TB2σBT
2 θ + γT1γ)dt
siendo que:[
θ1
θ2
]
= AT
[θ1
θ2
]
+CT1 γ
La ecuacion de Riccati que resuelve el problema del observadoroptimo esta dada por:
PFAT +APF −PFCTV−1CPF +B2WBT2 = 0
PFAT +APF −PFCT1 ∗1∗C1PF +σB2BT
2 = 0[
p11 p12
p12 p22
][1 01 1
]
+
[1 10 1
][p11 p12
p12 p22
]
−[
p11 p12
p12 p22
][10
][
1 0][
p11 p12
p12 p22
]
+σ[
11
][11
]T
= 0
[2p11+2p12− p2
11+σ p22+2p12− p12p11+σp22+2p12− p12p11+σ 2p22− p2
12+σ
]
=
[0 00 0
]
Resolviendo para cada elemento de la matrizP se obtiene:
PF = β[
1 11 2
]
dondeβ = 2+√
4+σ . Luego la ganancia del filtro de Kalman es:
L =V−1PCT1 = β
[11
]
9.2.2.3. LQG
Luego, el compensadoroptimo esta dado por:
˙x = Ax+B1u+L(y−C1x)u =−Kx
Reescribiendo lo anterior se tiene:
k(s) =[
A−B1K−LC1 L−K 0
]
,
donde
A−B1K−LC1 =
[1−β 1−(α +β ) 1−α
]
Evaluando−K(sI− (A−B1K−LC1))−1L, se obtiene:
k(s) =αβ (1−2s)
s2+(α +β −2)s+1+αβ
9.2.2.4. Estabilidad del sistema en lazo cerrado
Considerando el sistema en lazo cerrado mostrado en la Fig. 9.3, en donde la gananciaκ posee valor nominal iguala +1.

146 9 Estimacion Optima
Realizando los calculos se muestra que solo los terminos lineal y constantesdel polinomio caracterıstico del sistemaen lazo cerrado son funciones deκ y que esos terminos estan dados por:
β +α−4+2(κ−1)αβ y1+(1−κ)αβ
respectivamente. Una condicion necesaria para estabilidad es que ambos terminos sean positivos (criterio de estabilidadde Routh-Hurwitz?) Esta condicion es satisfecha para el caso del lazo nominalκ = 1. Sin embargo, paraα,β = 4 (enotras palabras,ρ = 0 y σ = 0), la condicion necesaria de estabilidad es
a− 18< κ < 1+
116
.
Esta situacion empeora siα y β son grandes. Para el caso deβ = α, la condicion necesaria de estabilidad se torna en:
1+2
α2 −1α
< κ < 1+1
α2 .
Luego, el margen de ganancia puede ser arbitrariamente pequeno si se seleccionaα y β (equivalentemente,ρ y σ ) losuficientemente grandes. Asi, concluimos que la optimalidad del LQG no garantiza robustez en estabilidad!
La robustez en estabilidad de un sistema en lazo cerrado LQG debe ser chequeadaa posteriori. Este inconveniente esuna propiedad fundamental de los metodos asociados a minimizacion de normas cuadraticas y fue una de las razonesprincipales por las que se inicia la investigacion en abordajes que minimizan la norma infinita. La robustez es unobjetivo clave de la realimentacion que siempre debe ser analizado.
s
plant
k
κ
w v
y
u
Figura 9.3 Sistema en lazo cerrado LQG con ganancia variable
Fuente: Applied Optimal Control, de A.E. Bryson, Jr. y Y.-C.Ho, Hemisphere Publishing, 1975.Fuente: Aircraft Control and Simulation, de B.L. Stevens y F.L. Lewis, John Wiley & Sons, NJ, Second Edition,
2003.Fuente: Advanced Control System Design, de B. Friedland, Prentice-Hall, 1996.Fuente: Capıtulo 7 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astrom y
Richard M. Murray.Fuente: Linear Robust Control, de M. Green y D. Limebeer, Pearson Education, Inc.

Capıtulo 10Topicos especiales de control
10.1. Problema de Generacion de Trayectoria
10.1.1. Introduccion
Dado un sistema de control no lineal:
x = f (x,u) x∈ Rn,u∈ R
p
y = h(x) y∈ Rq
y una trayectoria de referenciar(t) ∈ Rq, encontrar una ley de controlu= α(x, r) tal que:
limt→∞(y(t)− r(t)) = 0.
10.1.1.1. Abordaje:
Diseno de dos grados de libertad
Lecture 1-1: Trajectory Tracking and Gain SchedulingCDS 110b, 7 Jan 08
Figura 10.1 Generacion de trayectoria
10.1.1.2. Generacion de trayectoria:
Encontrar una trayectoria posible(satisface dinamica)
xd = f (xd,ud)r = h(xd)
→ xd(r),ud(r)
147

148 10 Topicos especiales de control
10.1.1.3. Seguimiento de trayectoria:
Encontraru= α(x,xd,ud) tal que el sistema en lazo cerrado sea estable, con desempeno deseado.
10.1.1.4. Estimacion:
Determinar ˆx a partir dey,u.
10.1.1.5. Revision:
Seguimiento de trayectoria para sistemas lineales:
x = Ax+Buy =Cx
u =−Kx+kr rr = constante
1. EscogerK para la dinamica en lazo cerrado deseada (ubicacion de autovalores, LQR, etc).2. Escogerkr que provee el valor deseado a la salida.
x = Ax+Bu= (A−BK)x+Bkr r
Puntodeequilibrio xe =−(A−BK)−1Bkr rye =−C(A−BK)−1Bkr r = r
︸︷︷︸
deseado
→ kr =−1
C(A−BK)−1B
Este abordaje trabaja mediante estabilizacion del origen y luego usandokr r para “empujar” el sistema haciaxe.Funciona porque el sistema es lineal.
10.1.2. Formulacion alternativa:
Resolver directamente para el punto de equilibrio. El objetivo es encontrar una ley de control tal que la salidalimt→∞y(t) = yd = para alguna salida deseadar. Para resolver este problema, primero definimos el estado deseadocorrespondiente limt→∞x(t) = xd y entrada limt→∞u(t) = ud para alcanzarr. Obviamente,xd, ud y yd deben satisfacerlas ecuaciones de estado y salida; esto es
xd = Axd +Bud
yd =Cxd +Dud
Siendo quexd es una constante, ˙xd = 0, tenemos:
0 = Axd +Bud
yd =Cxd +Dud
Dado yd, resolvemos las ecuaciones arriba paraxd y ud. Si no hay solucion paraxd y ud, entonces el objetivo delimt→∞y(t) = yd no se puede alcanzar. Entonces, asumamos que la solucion existe; esto es, la ecuacion lineal:
[0yd
]
=
[A BC 0
][xd
ud
]
tiene solucion. Para un sistema de una entrada una salida,xd y ud puede ser resuelto como

10.1 Problema de Generacion de Trayectoria 149
[xd
ud
]
=
[A BC 0
]−1[ 0yd
]
→ u= −K(−x−xd)︸ ︷︷ ︸
estabilizaptoequilibrio
+ ud︸︷︷︸
entradanominal
A seguir definimos las nuevas variables como:
∆x(t) = x(t)−xd
∆u(t) = u(t)−ud
∆y(t) = y(t)−yd
Derivar las ecuaciones espacio de estado para∆x(t), ∆u(t) y ∆y(t) como sigue:
∆ x = x− xd = x= Ax+Bu= A∆x+B∆ +Axd +Bud = A∆x+B∆u∆y = y−yd =Cx+Du−Cxd−Dud =C∆x+D∆u
Luego, las ecuaciones de estado y salida para∆x, ∆u, y ∆y son dadas por los mismas matricesA, B, C y D.
∆ x = A∆x+B∆u∆y =C∆x+D∆u
Suposicion fundamental: (xd,ud) es un punto de equilibrio parar constante.
10.1.2.1. Ejemplo
Considerar el siguiente sistema modelado como un motor DC.
θωi
=
0 1 00 0 4,4380 −12 −24
θωi
+
0020
v
donde los estadosθ ,ω, i son la posicion delangulo, la velocidad angular y la corriente, respectivamente; la entradaves el voltaje aplicado y la saliday es la posicion delangulo. Nuestro objetivo es llevar el motor aθd = 10 y a la vezminimizar
J(x) =∫ ∞
0(9(θ −θd)
2+v2)dτ .
Primero encontramosxd y ud como:
θd
ωd
idvd
=
[A BC D
]−1
00010
=
0 1 0 00 0 4,438 00 −12 −24 201 0 0 0
−1
00010
=
10000
El problema del LQR resulta:
∆θ∆ω∆ i
=
0 1 00 0 4,4380 −12 −24
∆θ∆ω∆ i
+
0020
∆v
Q=
9 0 00 0 00 0 0
R= 1
La solucion usando el metodo del autovector es:
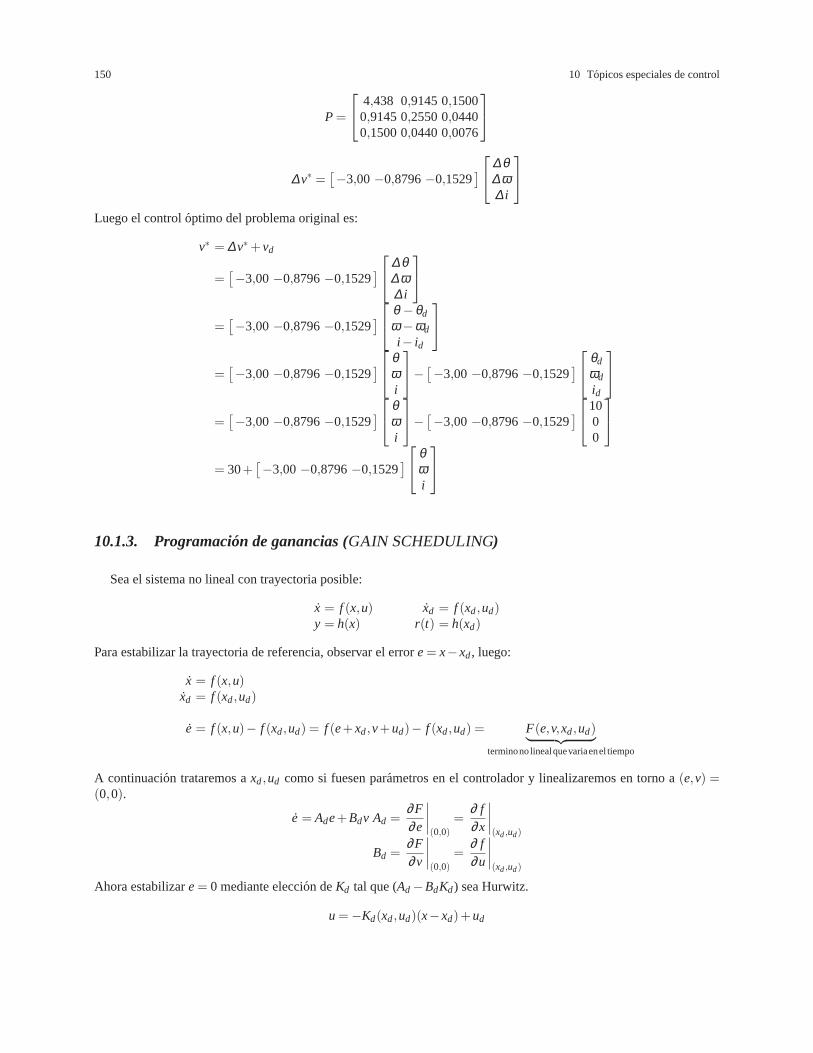
150 10 Topicos especiales de control
P=
4,438 0,9145 0,15000,9145 0,2550 0,04400,1500 0,0440 0,0076
∆v∗ =[−3,00−0,8796−0,1529
]
∆θ∆ω∆ i
Luego el controloptimo del problema original es:
v∗ = ∆v∗+vd
=[−3,00−0,8796−0,1529
]
∆θ∆ω∆ i
=[−3,00−0,8796−0,1529
]
θ −θd
ω−ωd
i− id
=[−3,00−0,8796−0,1529
]
θωi
−[−3,00−0,8796−0,1529
]
θd
ωd
id
=[−3,00−0,8796−0,1529
]
θωi
−[−3,00−0,8796−0,1529
]
1000
= 30+[−3,00−0,8796−0,1529
]
θωi
10.1.3. Programacion de ganancias (GAIN SCHEDULING)
Sea el sistema no lineal con trayectoria posible:
x = f (x,u)y = h(x)
xd = f (xd,ud)r(t) = h(xd)
Para estabilizar la trayectoria de referencia, observar elerrore= x−xd, luego:
x = f (x,u)xd = f (xd,ud)
e= f (x,u)− f (xd,ud) = f (e+xd,v+ud)− f (xd,ud) = F(e,v,xd,ud)︸ ︷︷ ︸
terminonolinealquevariaenel tiempo
A continuacion trataremos axd,ud como si fuesen parametros en el controlador y linealizaremos en torno a(e,v) =(0,0).
e= Ade+Bdv Ad =∂F∂e
∣∣∣∣(0,0)
=∂ f∂x
∣∣∣∣(xd,ud)
Bd =∂F∂v
∣∣∣∣(0,0)
=∂ f∂u
∣∣∣∣(xd,ud)
Ahora estabilizare= 0 mediante eleccion deKd tal que (Ad−BdKd) sea Hurwitz.
u=−Kd(xd,ud)(x−xd)+ud

10.1 Problema de Generacion de Trayectoria 151
10.1.3.1. Observaciones
1. No asumir que (xd,ud) son valores de equilibrio, solo que son valores que satisfacen la dinamica. Punto de equilibrioresulta en el caso especial der =constante.
2. De forma mas general se puede programar las ganancias obtenidas para cualquier parametro, o aun el estado:
u= Kd(xd,ud)(x−xd)+ud Usarconcuidado(NL!)
3. Problema: Linealizar en torno al punto de equilibrio deseado, luego linealizacion no trabajara muy bien lejos de estepunto.
4. En la practica, implementar la programacion de ganancias (gain scheduling) a traves de interpolacion:
Figura 10.2 Muestra de implementacion
5. En teorıa, no se puede decir mucho en relacion a como este metodo trabaja. Trabaja bien si (xd,ud) varian losuficientemente despacio. Trabaja bien en practica, aun si la variacion de (xd,ud) es rapida.
10.1.3.2. Ejemplo: Control de direccion con programacion de la velocidad - modelo de bicicleta
Considerar el vehiculo con dos ruedas mostrado en la Fig. 10.3. Para propositos de direccionamiento estamos in-teresados en un modelo que describe como la velocidad del vehiculo depende delangulo de direccion δ . Para serespecıficos, considerar la velocidadv del centro de masa, una distanciaa a partir de la rueda trasera, y seab la distanciaentre ruedas. Seanx e y las coordenadas del centro de masa,θ es elangulo de orientacion y α es elangulo entre lavelocidadv y la linea de centros del vehiculo. Dado queb = ρ tanδ y α = 0 (punto de referencia esta en la ruedatrasera), asumiendo que las ruedas ruedan sin resbalarse, encontramos que el movimiento del centro de masa esta dadopor:
dxdt
= vcosθdydt
= vsenθ(10.1)
Para ver como elanguloθ es influenciado por elangulo de direccion, observamos, de la Fig. 10.3, que el vehiculo rotacon la velocidad angularv/ra en torno al puntoO. Entonces:
dθdt
=vra
=vb
tanδ (10.2)
Las ecuaciones (10.1) y (10.2) pueden ser usadas para modelar la bicicleta bajo la suposicion que no hay resbalamientoentre ruedas y el piso. La suposicion de no resbalamiento puede ser relajada adicionando una variable de estado extra,dando asi un modelo mas realista. Tal modelo tambien describe la dinamica de direccionamiento de barcos asi como ladinamica de alabeo de aeronaves y misiles.
Las ecuaciones de movimiento no lineales del sistema puedenser descritas como:
ddt
xyθ
=
vcosθvsenθvb
tanδ
= f (x,y,θ
︸ ︷︷ ︸
x
, v,δ︸︷︷︸
u
)
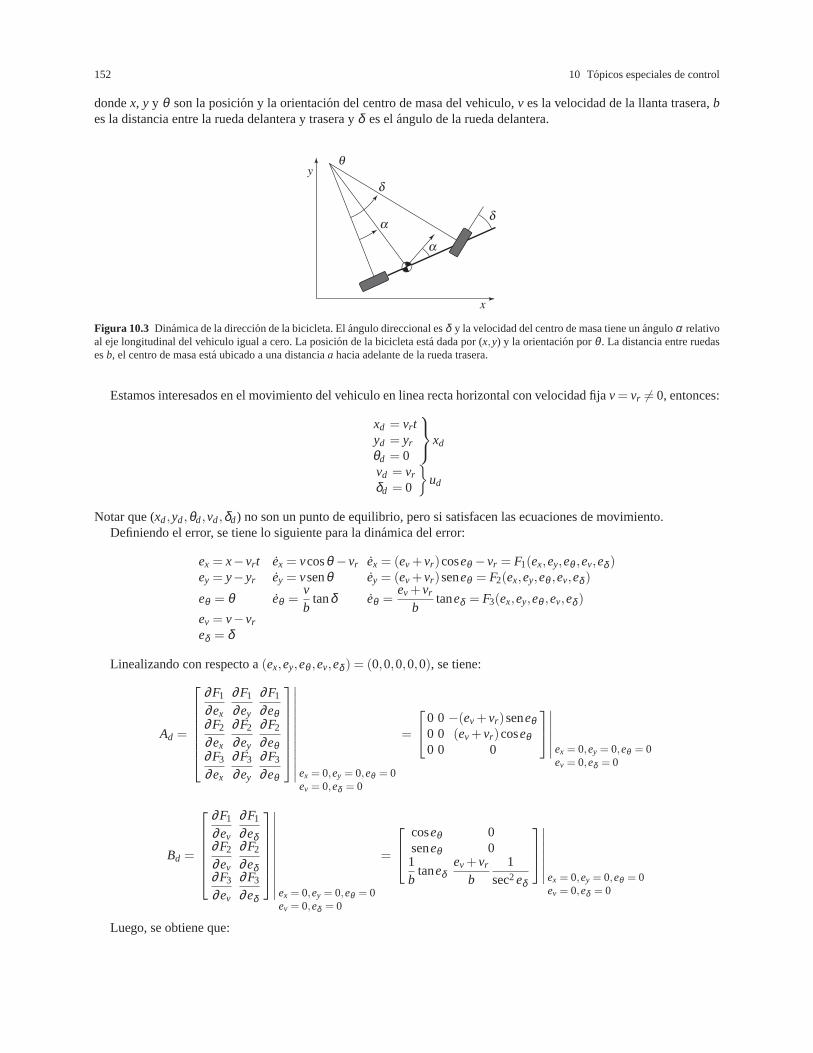
152 10 Topicos especiales de control
dondex, y y θ son la posicion y la orientacion del centro de masa del vehiculo,v es la velocidad de la llanta trasera,bes la distancia entre la rueda delantera y trasera yδ es elangulo de la rueda delantera.
y
x
α
α
δ
δ
θ
Figura 10.3 Dinamica de la direccion de la bicicleta. Elangulo direccional esδ y la velocidad del centro de masa tiene unanguloα relativoal eje longitudinal del vehiculo igual a cero. La posicion de la bicicleta esta dada por (x,y) y la orientacion porθ . La distancia entre ruedasesb, el centro de masa esta ubicado a una distanciaa hacia adelante de la rueda trasera.
Estamos interesados en el movimiento del vehiculo en linea recta horizontal con velocidad fijav= vr 6= 0, entonces:
xd = vr tyd = yr
θd = 0
xd
vd = vr
δd = 0
ud
Notar que (xd,yd,θd,vd,δd) no son un punto de equilibrio, pero si satisfacen las ecuaciones de movimiento.Definiendo el error, se tiene lo siguiente para la dinamica del error:
ex = x−vrt ex = vcosθ −vr ex = (ev+vr)coseθ −vr = F1(ex,ey,eθ ,ev,eδ )ey = y−yr ey = vsenθ ey = (ev+vr)seneθ = F2(ex,ey,eθ ,ev,eδ )
eθ = θ eθ =vb
tanδ eθ =ev+vr
btaneδ = F3(ex,ey,eθ ,ev,eδ )
ev = v−vr
eδ = δ
Linealizando con respecto a(ex,ey,eθ ,ev,eδ ) = (0,0,0,0,0), se tiene:
Ad =
∂F1
∂ex
∂F1
∂ey
∂F1
∂eθ∂F2
∂ex
∂F2
∂ey
∂F2
∂eθ∂F3
∂ex
∂F3
∂ey
∂F3
∂eθ
∣∣∣∣∣∣∣∣∣∣∣∣ ex = 0,ey = 0,eθ = 0
ev = 0,eδ = 0
=
0 0−(ev+vr)seneθ0 0 (ev+vr)coseθ0 0 0
∣∣∣∣∣∣ ex = 0,ey = 0,eθ = 0
ev = 0,eδ = 0
Bd =
∂F1
∂ev
∂F1
∂eδ∂F2
∂ev
∂F2
∂eδ∂F3
∂ev
∂F3
∂eδ
∣∣∣∣∣∣∣∣∣∣∣ ex = 0,ey = 0,eθ = 0
ev = 0,eδ = 0
=
coseθ 0seneθ 01b
taneδev+vr
b1
sec2eδ
∣∣∣∣∣∣∣ ex = 0,ey = 0,eθ = 0
ev = 0,eδ = 0
Luego, se obtiene que:

10.2 Filtro de Kalman Extendido 153
Ad =
0 0 00 0 vr
0 0 0
, Bd =
1 00 0
0vr
b
o, mas especıficamente:
ex
ey
eθ
=
0 0 00 0 vr
0 0 0
ex
ey
eθ
+
1 00 0
0vr
b
[ev
eδ
]
Resolviendo el problema de control para este sistema (ubicacion de polo, LQR), se tiene que:
[ev
eδ
]
=−Kd
ex
ey
eθ
[vδ
]
=−Kd
x−vrty−yr
θ
+
[vr
0
]
Una opcion para el calculo deKd puede ser:
ex = ev ev =−λ1ex
ey = vreθ eδ =− bvr(a1ey+a2eθ )
eθ =vr
beδ
,
que posiciona los polos del sistema en lazo cerrado enλ1 y las raices des2+a1s+a2 = 0. Luego el controlador encoordenadas originales queda como:la posicion delangulo
[vδ
]
=−
λ1 0 0
0a1bvr
a2bvr
︸ ︷︷ ︸
Kd
x−vrty−yr
θ
︸ ︷︷ ︸
e
+
[vr
0
]
︸ ︷︷ ︸
ud
10.2. Filtro de Kalman Extendido
Una amplia clase de problemas de estimacion involucra modelos no lineales. Por muchas razones, estimacion deestados para sistemas no lineales es considerablemente mas difıcil y admite una gran variedad de soluciones en com-paracion al problema lineal. Considerando el siguiente modelo no lineal real con medidas de tiempo contınuas:
x(t) = f (x(t),u(t))+G(t)w(t),y(t) = h(x(t))+v(t)
(10.3)
dondef (x(t),u(t), t) y h(x(t), t) son asumidas contınuas y diferenciables, yw(t) y v(t) son procesos de ruido Gausianode media cero con covarianzas dadas por:
Ew(t)wT(τ)=Wδ (t− τ) (10.4)
Ev(t)vT(τ)=Vδ (t− τ) (10.5)
Ev(t)wT(τ)= 0 (10.6)
La ecuacion (10.6) implica quev(t) y w(t) no estan corelacionados. Ademas, la entrada de controlu(t) es una cantidaddeterminıstica. El problema con un modelo no lineal es que una entradaGausiana no necesariamente produce unasalida Gausiana (como en el caso lineal).

154 10 Topicos especiales de control
Existen muchas formas de producir una version linealizada del filtro de Kalman. A continuacion consideraremos elabordaje mas comun, llamadofiltro de Kalman Extendido. El filtro de Kalman extendido, a pesar de no ser precisamente“ optimo”, ha sido satisfactoriamente aplicado a varios sistemas no lineales en el transcurso de los anos. El conceptofundamental de este filtro involucra la nocion de que el estado real esta lo suficientemente cerca del estado estimado.Luego, la dinamica del error puede ser representado de forma bastante exacta mediante una expansion en series deTaylor linealizada de primer orden.
A continuacion omitiremos la dependencia con respecto al tiempo de las senales para simplicar la notacion. Con-siderando el observador no lineal como descrito a seguir:
˙x= f (x,u)+L(y−h(x)) (10.7)
La dinamica del error de estimacion,e= x− x, esta definida por:
˙e= f (x,u)− f (x,u)+Gw−L(h(x)−h(x))−Lv= F(e, x,u)+Gw−LH(e, x)−Lv︸ ︷︷ ︸
E(e, x,u,w,v)
(10.8)
donde:F(e, x,u) = f (e+ x,u)− f (x,u)
H(e, x) = h(e+ x)−h(x)
Linealizando ahora en torno al estimadoactualx, e= 0, y los ruidos de proceso y medida,w= 0 y v= 0:
e=∂E∂e
∣∣∣∣(0,x,u,0,0)
e+∂E∂w
∣∣∣∣(0,x,u,0,0)
w+∂E∂v
∣∣∣∣(0,x,u,0,0)
v
e=
(
∂F∂e
∣∣∣∣(0,x,u)
−L∂H∂e
∣∣∣∣(0,x)
)
e+Gw−Lv
e= (A(x)−LC(x))e+Gw−Lv
(10.9)
donde:
A(x) =∂F∂e
∣∣∣∣(0,x,u)
=∂ f∂x
∣∣∣∣(x,u)
C(x) =∂H∂e
∣∣∣∣(0,x)
=∂h∂x
∣∣∣∣(x)
dependendelestadoactual ˆx
10.2.1. Idea
Disenar el observador para el sistema linealizado en torno al estimadoactualObservador:
x= f (x,u)+L(y−h(x))
donde:L = PCT(x)V−1
P= A(x)P+PAT(x)+GWGT +PCT(x)V−1C(x)P, P(to) = Ee(to)eT(to).Este viene a ser el Filtro de Kalman Extendido (EKF) (Schmidt).
10.2.2. Ejemplo
En este ejemplo demostraremos la utilidad del filtro de Kalman extendido para estimar los estados de la ecuacionde Van der Pol, dada por:

10.2 Filtro de Kalman Extendido 155
mx+2c(x2−1)x+Kx= 0,
dondem, c y k poseen valores positivos. Esta ecuacion induce un ciclo limite que es sostenido periodicamente medianteliberacion de energıa hacia y absorcion de energıa del ambiente, a traves del termino de amortiguamiento. El sistemapuede ser representado en su representacion espacio de estados como descrito a continuacion:
x1 = x2
x2 =−2(c/m)(x21−1)x2− (k/m)x1
.
Las senales medidas son posicion tal queC = [1 0]. Para efectos del ejemplo hemos generado los estados usandom= c= k= 1 y con condicion inicial igual axo = [1 0]T . Las medidas son muestreadas con intervalos de∆ t = 0,01scon un error de medida con desviacion estandar deσ = 0,01. El modelo linealizadoA y la matrizG usados en el filtrode Kalman extendido son:
A=
[0 1
−4(c/m)x1x2− (k/m) −2(c/m)(x21−1)
]
, G=
[01
]
.
Notese que no se ha incluido ruido de proceso (en otras palabras, no hay error) en el primer estado. Esto es debido alhecho que el primer estado es una relacion cinematica que es correcta tanto en teorıa como en la practica (velocidadsiempre es derivada de la posicion).
En el filtro de Kalman extendido los parametro del modelo son asumidos comom= 1, c = 1,5 y k = 1,2, lo cualintroduce errores en los parametros asumidos, comparados al sistema real. La covarianza inicial es escogida comoPo = 1000I . El escalarW en el filtro de Kalman extendido es luego variado hasta que se obtengan estados estimadosrazonables (este afinamiento de la matriz de covarianza es bastante comun en el diseno del filtro de Kalman tambien).La respuesta a la pregunta ¿cuales son los estimados razonables? es a menudo dejado al ingeniero de diseno. Dadoque para simulacion los valores verdaderos son conocidos, podemos comparar nuestros estimados con los verdaderosvalores para afinarW. Encontramos queq= 0,2 provee un buen estimado.
0 2 4 6 8 10−5
−2.5
0
2.5
5
0 2 4 6 8 10−5
−2.5
0
2.5
5
0 2 4 6 8 10−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0 2 4 6 8 10−0.5
−0.25
0
0.25
0.5
Time (Sec)Time (Sec)
Time (Sec)Time (Sec)
Est
imat
eV
elo
city
Err
ors
Po
siti
on
Err
ors
Dif
fere
nce
dM
easu
rem
ent
© 2004 by CRC Press LLC
Figura 10.4 Resultados del filtro de Kalman extendido para la ecuacion de Van der Pol
Fuente: Lecture 1-1, CDS 110b, de Richard Murray.Fuente: Capıtulo 3 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astrom y
Richard M. Murray.Fuente: Optimal Estimation of Dynamical Systems, de J.L. Crassidis y J.L. Junkins, 2004.


Capıtulo 11Problemas propuestos y resueltos
11.1. Problemas Capıtulo 1
Problema 1.1: Velero
Un velero de masam y velocidadv(t) (el viento con una velocidad constantevw
empuja al velero desde la parte trasera), desarrolla una fuerza impulsora igual a:
Fa(t) = k1(vw−v(t))2A(t),
dondeA(t) es elarea de la vela. La fuerza de resistencia que el velero debe superarcuando viaja en el agua se puede aproximar por:
Fw(t) = k2v2(t).
v(t)w
A(t)v
(1.1) Velero
1. Derivar las ecuaciones de movimiento para el velero. Escribir la representacion espacio de estados para la entradaA(t) y la salidav(t).Usando la 2da Ley de Newton se obtiene la ecuacion de movimiento del velero:
→∑F = mdvdt
Fa(t)−Fw(t) = mdvdt
k1(vw−v(t))2A(t)−k2v2(t) = mdvdt
Ecuacion de movimiento: mdvdt−k1(vw−v(t))2A(t)+k2v2(t) = 0. Escribiendo la ecuacion de movimiento en la
forma de espacio de estados, siendo quev(t) es la variable de estado,A(t) es la variable de entrada yv(t) es tambienla variable de salida.
ddt
v=k2
mv2(t)− k1
m(vw−v(t))2A(t)
y= v.
La dinamica del sistema presenta una representacion espacio estados de la forma ˙x= f (x,u) ya que estamos lidiandocon un sistema no lineal.
2. ¿Que tan grande debe ser elarea de la velaA(t) para mantener la nave a una velocidad constantevo < vw?
Si la velocidad del velero es constante, se debe cumplirdvdt
= 0. Luego de la representacion espacio de estados se
tiene que:
157

158 11 Problemas propuestos y resueltos
ddt
v= 0=k2
mv2
o−k1
m(vw−vo)
2A(t).
Entonces:
Ao =k2v2
o
k1(vw−vo)2 .
3. ¿Cual deberıa ser elarea de la vela para llegar a un velocidad constantevo = vw?Si la velocidadv es constante e igual avw, entonces de la expresion anterior se tiene que:
A(t)vo→vw = l ımvo→vw
k2v2o
k1(vw−vo)2 → ∞.
Problema 1.2: Oscilador Van der Pol
Considere el circuito simpleR,L,C de la Fig.(1.2) conL y C siendo elementos lineales yRsiendo un resistor no lineal (no cumple la ley deOhmVC = iRR, en su lugariR= f (vC)). La figuraa la derecha muestra la caracterıstica del resistor.
(1.2) Circuito de oscilacion Van der Pol
1. Elegir como estados a la corriente en el inductoriL y el voltaje del capacitorvC y calcular la representacion espaciode estados del sistema.Para modelar el circuito electrico usamos la ley de Kirchhoff para corrientes:
iC = iR+ iL.
CdvC
dt=−vC+v3
C+ iL.
Despejando en funcion de la variable de estadovC:
dvC
dt=− 1
CvC+
1C
v3C+
1C
iL.
Tambien sabemos que en un circuito que tiene elementos conectadosen paralelo se cumple que:
vC = LdiLdt
.
Despejando en funcion de la variable de estadoiL:
diLdt
=1L
vC.
Siendo los estadosiL y vC, la representacion espacio de estado del sistema es:
ddt
[i lvC
]
=
1L
vC
− 1C
vC+1C
v3C+
1C
iL
.
La dinamica del sistema presenta una representacion espacio estados de la forma ˙x= f (x,0) ya que estamos lidiandocon un sistema no lineal.
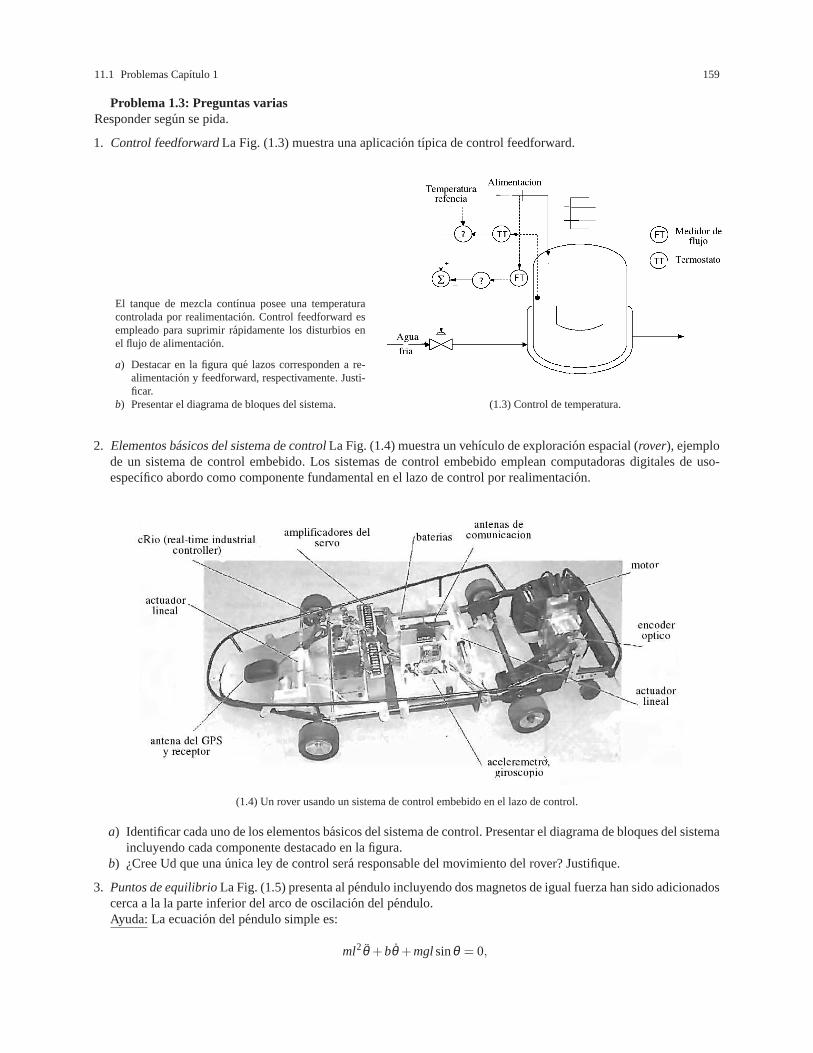
11.1 Problemas Capıtulo 1 159
Problema 1.3: Preguntas variasResponder segun se pida.
1. Control feedforwardLa Fig. (1.3) muestra una aplicacion tıpica de control feedforward.
El tanque de mezcla contınua posee una temperaturacontrolada por realimentacion. Control feedforward esempleado para suprimir rapidamente los disturbios enel flujo de alimentacion.
a) Destacar en la figura que lazos corresponden a re-alimentacion y feedforward, respectivamente. Justi-ficar.
b) Presentar el diagrama de bloques del sistema. (1.3) Control de temperatura.
2. Elementos basicos del sistema de controlLa Fig. (1.4) muestra un vehıculo de exploracion espacial (rover), ejemplode un sistema de control embebido. Los sistemas de control embebido emplean computadoras digitales de uso-especıfico abordo como componente fundamental en el lazo de control por realimentacion.
(1.4) Un rover usando un sistema de control embebido en el lazo de control.
a) Identificar cada uno de los elementos basicos del sistema de control. Presentar el diagrama de bloques del sistemaincluyendo cada componente destacado en la figura.
b) ¿Cree Ud que unaunica ley de control sera responsable del movimiento del rover? Justifique.
3. Puntos de equilibrioLa Fig. (1.5) presenta al pendulo incluyendo dos magnetos de igual fuerza han sido adicionadoscerca a la la parte inferior del arco de oscilacion del pendulo.Ayuda:La ecuacion del pendulo simple es:
ml2θ +bθ +mglsinθ = 0,

160 11 Problemas propuestos y resueltos
a) Bosquejeel diagrama de plano de fase del sistema del sistemapendulo sin considerar los magnetos. Considereθ ∈ [−2π,2π].Explique el grafico realizado.
b) Si bien la ecuacion de movimiento del sistema incluyendo losmagnetos es compleja en su calculo, bosquejecomo lucirıa el di-agrama de plano de fase del sistema. Considereθ ∈ [−π/2,π/2].¿Cuales son los puntos de equilibrio de este sistema? (1.5) Pendulo con dos magnetos.
dondeθ es elangulo hecho por el pendulo con la vertical,g es la aceleracion de la gravedad yb > 0 el amor-tiguamiento del sistema. Las variables de estado sonθ y θ .
Problema 1.4: Modelado de sistemas
Encontrar formas de realizar operaciones de manipu-lacion/reparacion en el espacio es un problema que recibe bas-tante atencion - por ejemplo, para el ensamblaje de la estacionespacial internacional y para la recuperacion de satelites. En laactualidad el trabajo lo vienen realizando sistemas de manip-ulacion remota; sin embargo, un nuevo metodo considerandopartes inflables del manipulador viene siendo estudiado debidoa la gran reduccion en peso. La Fig. (1.6a) muestra la construc-cion de una estructura espacial desde un transbordador y la Fig.(1.6b) muestra un modelo del manipulador flexible dondeJ esla inercia del motor conductor,I es la inercia de la carga medi-da en su centro de masa,u es el torque generado el motor,mesla masa de la carga,l es la distancia al centro de gravedad dela carga,φ y θ son losangulos de rotacion del motor y la car-ga respectivamente, yk es la rigidez torsional del eje flexible.Considerarw como un torque externo que afecta a la carga.
(1.6) Sistema de manipulacion remota
1. Presentar un modelo mecanico traslacional, analogo al modelo mecanico torsional presentado en la Fig. (3b).2. Calcular las ecuaciones de movimiento del sistema. Considerar el efecto de la fuerza gravitatoria (aun siendoesta
pequena).3. Derivar la representacion espacio de estados del sistema introduciendo las variables de estado (normalizadas)x1 =
θ − φ ,x2 =θ − φ
ωo, dondeωo =
√
k(J+ I +ml2)J(I +ml2)
. Considerar aceleracion de la gravedadg = 0, solo para esta
pregunta.
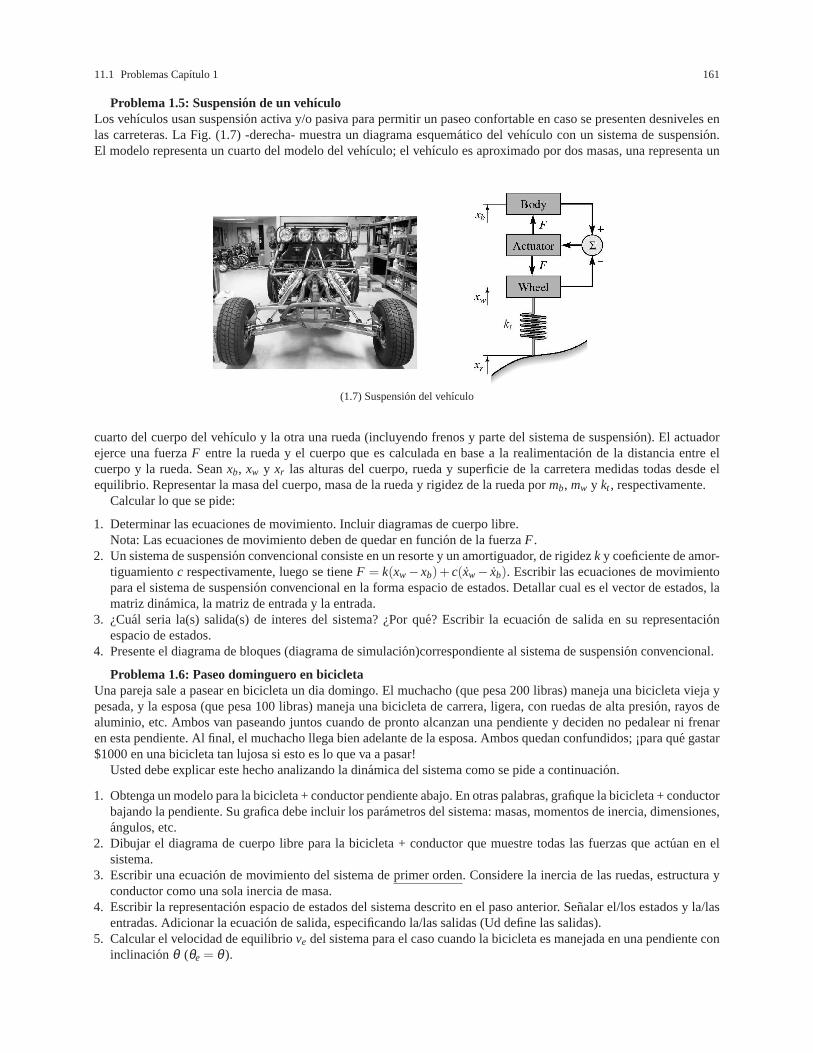
11.1 Problemas Capıtulo 1 161
Problema 1.5: Suspension de un vehıculoLos vehıculos usan suspension activa y/o pasiva para permitir un paseo confortable en caso se presenten desniveles enlas carreteras. La Fig. (1.7) -derecha- muestra un diagramaesquematico del vehıculo con un sistema de suspension.El modelo representa un cuarto del modelo del vehıculo; el vehıculo es aproximado por dos masas, una representa un
(1.7) Suspension del vehıculo
cuarto del cuerpo del vehıculo y la otra una rueda (incluyendo frenos y parte del sistema de suspension). El actuadorejerce una fuerzaF entre la rueda y el cuerpo que es calculada en base a la realimentacion de la distancia entre elcuerpo y la rueda. Seanxb, xw y xr las alturas del cuerpo, rueda y superficie de la carretera medidas todas desde elequilibrio. Representar la masa del cuerpo, masa de la rueday rigidez de la rueda pormb, mw y kt , respectivamente.
Calcular lo que se pide:
1. Determinar las ecuaciones de movimiento. Incluir diagramas de cuerpo libre.Nota: Las ecuaciones de movimiento deben de quedar en funcion de la fuerzaF .
2. Un sistema de suspension convencional consiste en un resorte y un amortiguador, derigidezk y coeficiente de amor-tiguamientoc respectivamente, luego se tieneF = k(xw− xb)+ c(xw− xb). Escribir las ecuaciones de movimientopara el sistema de suspension convencional en la forma espacio de estados. Detallar cual es el vector de estados, lamatriz dinamica, la matriz de entrada y la entrada.
3. ¿Cual seria la(s) salida(s) de interes del sistema? ¿Por que? Escribir la ecuacion de salida en su representacionespacio de estados.
4. Presente el diagrama de bloques (diagrama de simulacion)correspondiente al sistema de suspension convencional.
Problema 1.6: Paseo dominguero en bicicletaUna pareja sale a pasear en bicicleta un dia domingo. El muchacho (que pesa 200 libras) maneja una bicicleta vieja ypesada, y la esposa (que pesa 100 libras) maneja una bicicleta de carrera, ligera, con ruedas de alta presion, rayos dealuminio, etc. Ambos van paseando juntos cuando de pronto alcanzan una pendiente y deciden no pedalear ni frenaren esta pendiente. Al final, el muchacho llega bien adelante de la esposa. Ambos quedan confundidos; ¡para que gastar$1000 en una bicicleta tan lujosa si esto es lo que va a pasar!
Usted debe explicar este hecho analizando la dinamica del sistema como se pide a continuacion.
1. Obtenga un modelo para la bicicleta + conductor pendienteabajo. En otras palabras, grafique la bicicleta + conductorbajando la pendiente. Su grafica debe incluir los parametros del sistema: masas, momentos de inercia, dimensiones,angulos, etc.
2. Dibujar el diagrama de cuerpo libre para la bicicleta + conductor que muestre todas las fuerzas que actuan en elsistema.
3. Escribir una ecuacion de movimiento del sistema de primer orden. Considere la inercia de las ruedas, estructura yconductor como una sola inercia de masa.
4. Escribir la representacion espacio de estados del sistema descrito en el paso anterior. Senalar el/los estados y la/lasentradas. Adicionar la ecuacion de salida, especificando la/las salidas (Ud define las salidas).
5. Calcular el velocidad de equilibriove del sistema para el caso cuando la bicicleta es manejada en una pendiente coninclinacion θ (θe = θ ).

162 11 Problemas propuestos y resueltos
6. (2 ptos) Escriba la aproximacion lineal del sistema en torno al punto de equilibrio (ve,θe).7. En base a la descripcion de las bicicletas y de los conductores, usar el modelo linealizado para mostrar por que el
muchacho, de mayor peso y conduciendo la bicicleta vieja, termina llegando primero al final de la pendiente.Sugerencia: Resolver la ecuacion diferencial para el caso ˜v(0) = 0.
Despues de todo este analisis, ¿cual serıa la ventaja de poseer una bicicleta mas ligera?Respuesta:la ventaja semanifiesta cuando se maneja cuesta arriba!
Problema 1.7: Microscopio de fuerza atomica (AFM, por sus siglas en Ingles)El AFM es una de las principales herramientas en generacion de imagenes, medidas y manipulacion de materia enla nanoescala. La informacion es colectada “palpando” la superficie de la muestra (sample) con una sonda mecanica(viga voladiza -cantilever). Elementos piezoelectricos ejecutan pequenos y precisos movimientos generados por uncomando electronico.
Una diagrama esquematico del AFM se muestra en la figura de la izquierda. Una viga voladiza (cuya longitudusualmente varia entre 50-200µm) con una punta conica es colocada cerca de la muestra. La muestra puede ser movidavertical y horizontalmente usando un elemento piezoelectrico. Cuando la muestra se acerca a la punta de la viga, fuerzasde interaccion entre la muestra y la punta conllevan a una deflexion de la viga voladiza. La deflexion es medida usandoun rayo laser reflejado desde la parte superior de la viga voladiza hacia un arreglo de fotodiodos. La deflexion de laviga es controlada por realimentacion usando un actuador piezolectrico que controla la posicion vertical de la muestra.
En base a experimentos se captura la dinamica del sistema piezoelectrico-viga voladiza y se obtiene un modelomecanico simple del sistema (figura de la derecha). El sistema puede ser modelado como dos masas separadas porun piezoelectrico ideal. La masam1 es la mitad del sistema piezoelectrico, y la masam2 es la otra mitad del sistemapiezoelectrico mas la masa del apoyo. Se asume que el piezoelectrico genera una fuerzaF entre las masas y que hayamortiguamientosc1 y c2 en los resortes. Sean las posiciones de los centros de masaz1 y z2.
82
Amplifier Amplifier
Sample
Cantilever
x,y z
LaserPhotodiode
Controller
Piezodrive
Deflection reference
Sweepgenerator
(a) Schematic diagram(1.8a) Diagrama esquematico del AFM
m1
k1
m2
c1
k2c2
F
F
Show that the dynamics can be written as(1.8b) Modelo mecanico del AFM con piezoelectrico
pre-cargado (F)
1. Determinar las ecuaciones de movimiento del sistema piezoelectrico - viga voladiza. Asumir que el sistema partedel equilibrio estatico (no incluir fuerza gravitacional). Presentar diagramas de cuerpo libre
2. Sea la elongacion del elemento piezoelectricol = z1−z2 la variable de control y sea la deflexion de la viga voladizaz1 la variable de salida, eliminar la variableF en las ecuaciones anteriores y reescribir las ecuaciones enfuncion delas variablesl y z1
3. Usando las ecuaciones linealesl = k3u y y = k4z1, escribir el modelo del sistema relacionando la saliday con susenal de controlu. La saliday corresponde a la deflexion amplificada y la senal de controlu corresponde al voltajeaplicado al piezoelectrico
4. Calcular la representacion espacio de estados del sistema anterior. ¿Cuales son los estados, la/las entrada/as y salidadel sistema?
5. Obtener la funcion de transferencia del sistema piezoelectrico-viga voladiza,G(s) = Y(s)U(s) .
6. Calcular la dinamica normalizada del sistema y su correspondiente representacion espacio de estados.Sugerencia:
Definir las variables adimensionalesx = yL y τ = ωt, dondeω =
√km, y seleccionar la entrada de controlv de la
forma mas conveniente
Problema 1.8: Preguntas variadasResponda segun sea el caso. Argumente en las respuestas.
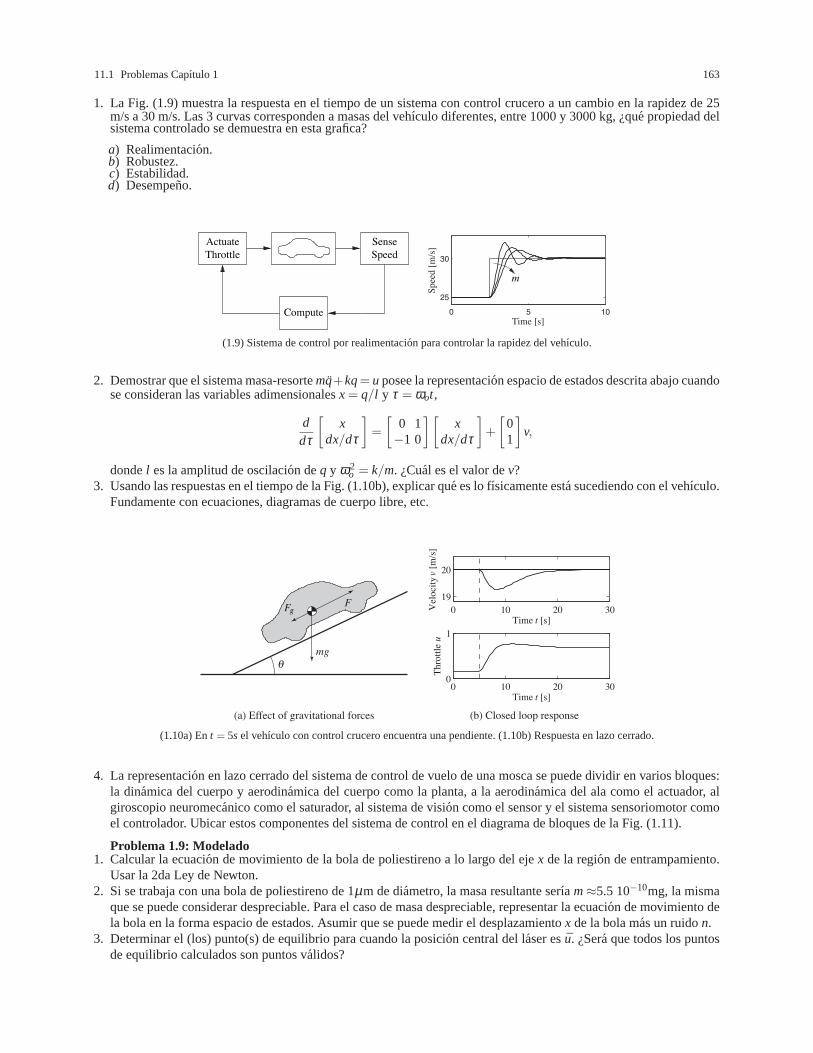
11.1 Problemas Capıtulo 1 163
1. La Fig. (1.9) muestra la respuesta en el tiempo de un sistema con control crucero a un cambio en la rapidez de 25m/s a 30 m/s. Las 3 curvas corresponden a masas del vehıculo diferentes, entre 1000 y 3000 kg, ¿que propiedad delsistema controlado se demuestra en esta grafica?
a) Realimentacion.b) Robustez.c) Estabilidad.d) Desempeno.
Compute
Actuate
Throttle
Sense
Speed
0 5 10
25
30
Speed[m/s]
Time [s]
m
(1.9) Sistema de control por realimentacion para controlar la rapidez del vehıculo.
2. Demostrar que el sistema masa-resortemq+kq= u posee la representacion espacio de estados descrita abajo cuandose consideran las variables adimensionalesx= q/l y τ = ωot,
ddτ
[x
dx/dτ
]
=
[0 1−1 0
][x
dx/dτ
]
+
[01
]
v,
dondel es la amplitud de oscilacion deq y ω2o = k/m. ¿Cual es el valor dev?
3. Usando las respuestas en el tiempo de la Fig. (1.10b), explicar que es lo fısicamente esta sucediendo con el vehıculo.Fundamente con ecuaciones, diagramas de cuerpo libre, etc.
gF
mg
F
θ
(a) Effect of gravitational forces
0 10 20 30
19
20
Time t [s]
Vel
oci
ty v
[m
/s]
0 10 20 300
1
Time t [s]
Th
rott
le u
(b) Closed loop response
(1.10a) Ent = 5s el vehıculo con control crucero encuentra una pendiente. (1.10b)Respuesta en lazo cerrado.
4. La representacion en lazo cerrado del sistema de control de vuelo de una moscase puede dividir en varios bloques:la dinamica del cuerpo y aerodinamica del cuerpo como la planta, a la aerodinamica del ala como el actuador, algiroscopio neuromecanico como el saturador, al sistema de vision como el sensor y el sistema sensoriomotor comoel controlador. Ubicar estos componentes del sistema de control en el diagrama de bloques de la Fig. (1.11).
Problema 1.9: Modelado1. Calcular la ecuacion de movimiento de la bola de poliestireno a lo largo del ejex de la region de entrampamiento.
Usar la 2da Ley de Newton.2. Si se trabaja con una bola de poliestireno de 1µm de diametro, la masa resultante serıa m≈5.5 10−10mg, la misma
que se puede considerar despreciable. Para el caso de masa despreciable, representar la ecuacion de movimiento dela bola en la forma espacio de estados. Asumir que se puede medir el desplazamientox de la bola mas un ruidon.
3. Determinar el (los) punto(s) de equilibrio para cuando laposicion central del laser es ¯u. ¿Sera que todos los puntosde equilibrio calculados son puntos validos?

164 11 Problemas propuestos y resueltos
(1.11) Vision como mecanismo compensatorio para atenuacion de disturbios tipo vientovw.
Un microscopio de pinzasopticas es un instrumento cientıfico capaz de manipularpartıculas dielectricas (dimensiones en nm oµm) mediante la aplicacion de fuerzas(en el orden de pN) via un rayo laser focalizado. Este microscopio es muy usadoen el estudio de sistemas biologicos, ver Fig.1 donde se realiza un estiramiento dela molecula de ADN para determinar sus propiedades fısicas; los extremos de lamolecula de ADN estan pegados a unas bolas de poliestireno.La Fig.(1.12) muestra el punto mas estrecho del haz de laser, el cual posee ungradiente de campo electrico muy fuerte que atrae a las partıculas dielectricas,formandose una especie de trampa. Cuando la bola es movida del centro de la tram-pa debido a una fuerza externa, el haz de laser es deflectado; esta deflexion se midecon un fotodiodo detector de posicion. El objetivo de control consiste en reducir lasvariaciones en la posicion de la bola debido a la accion de fuerzas externas.La bola de poliestireno posee masam y su desplazamiento en la direccion +x esdebido a las siguientes fuerzas:
Fo: fuerza de entrampamientooptico (fuerza restauradora), dondeu es la posi-cion central del laser focalizado y viene a ser la entrada de control, yα1,α3 > 0.
Fo =
α3(x−u)3−α1(x−u), para|x−u|< R=
√α1
α30, otro caso
,
Fd: fuerza de arrastre viscoso.Fd =−β x, β > 0.Ft : fuerza termica.Fe: otras fuerzas externas que dependen de las condiciones delexperimento.
Fig.(1.12) Diagrama esquematico de un experimentode estiramiento de una molecula de ADN.
Fig.(1.13) Desplazamiento en el ejex de la bola depoliestireno atrapada por el rayo laser.
4. Escribir la representacion lineal del sistema en torno a un punto de equilibrio apropiadamente elegido.5. ¿Es el sistema estable, controlable, observable?

11.2 Problemas Capıtulo 2 165
11.2. Problemas Capıtulo 2
Problema 2.1: Oscilador Van der Pol
Considere el circuito simpleR,L,C de laFig.(2.1) conL y C siendo elementos lineales yRsiendo un resistor no lineal (no cumple la ley deOhmVC = iRR, en su lugariR= f (vC)). La figuraa la derecha muestra la caracterıstica del resistor.
(2.1) Circuito de oscilacion Van der Pol
1. Elegir como estados a la corriente en el inductoriL y el voltaje del capacitorvC y calcular la representacion espaciode estados del sistema.Siendo los estadosiL y vC, la representacion espacio de estado del sistema es:
ddt
[iLvC
]
=
1L
vC
− 1C
vC+1C
v3C+
1C
iL
.
2. Encontrar el(los) punto(s) de equilibrio del sistemaLos puntos de equilibrio se encuentran al igual a cero las derivadas con respecto al tiempo en la representacionespacio de estados. Entonces:
ddt
[iLe
vCe
]
=
[00
]
=
1L
vCe
− 1C
vCe+1C
v3Ce+
1C
iLe
.
Las ecuaciones que se deben resolver para calcular los puntos de equilibrio son:
vCe= 0 y − 1C
vCe+1C
v3Ce+
1C
iLe = 0
Luego el punto de equilibrio es:(iLe,vCe) = (0,0).3. Seleccionar un punto de equilibrio y calcular la representacion lineal del sistema en torno al punto de equilibrio
seleccionado.La dinamica linealizada del sistema en torno al punto de equilibrio antes calculado:
ddt
[iLvC
]
=
1L
vC
− 1C
vC+1C
v3C+
1C
iL
=
[f1(iL,vC)f2(iL,vC)
]
.
ddt
[iLvC
]
=
∂ f1∂ iL
∂ f1∂vC
∂ f2∂ iL
∂ f2∂vC
∣∣∣∣∣∣∣ iL = iLe
vC = vCe
[iLvC
]
[iLvC
]
=
01L
1C− 1
C+3
1C
v2C
∣∣∣∣∣∣∣ iL = iLe
vC = vCe
[iLvC
]
.

166 11 Problemas propuestos y resueltos
[iLvC
]
=
01L
1C− 1
C
[iLvC
]
.
4. ¿Que puede decir sobre la estabilidad del sistema en torno al punto de equilibrio seleccionado?La estabilidad del sistema lineal se calcula resolviendo para los autovalores del sistema:
λ (A) = λ
01L
1C− 1
C
=− 1
2C± 1
2C
√
1+4CL
Como√
1+4CL > 1, entonces existe un autovalor deA con parte real negativa, esto significa que el punto de
equilibrio (0,0) es inestable.
Problema 2.2: Aeronave PVTOL
Considere una aeronave de despegue y aterrizaje vertical (PVTOL), como mostrado en laFig.(2.2). Los estados son las posicionesy,z del centro de masa, elangulo de alabeoφ , ylas velocidades correspondientes, ˙y, z, φ . Las entradas de control,ut y um, son el empujeaplicado en el centro de masa y el momento de alabeoen torno al centro de masa de laaeronave, respectivamente. Adicionalmente,ε > 0 es un coeficiente pequeno relacionadoal acoplamiento entre el momento de alabeo y la aceleracion lateral de la aeronave. Final-mente,g denota la fuerza gravitacional.En el modelo de la aeronave PVTOL, desprecie el efecto de flexion en las alas o fuselaje yconsidere a la aeronave como un cuerpo rıgido.
(2.2) Aeronave PVTOL
1. Calcular las ecuaciones de movimiento del PVTOL. Masa de la aeronave,m, y momento de inercia con respecto alcentro de masa de la aeronave y a lo largo del fuselaje esJ.Las ecuaciones de movimiento para un prototipo PVTOL son:
my= sinφut −cosφεum
mz= −cosφut −sinφεum+mgJφ = um
2. Escribir las ecuaciones de movimiento usando las siguientes variable normalizadas:Y =yg,Z =
zg,Um =
um
J,Ut =
ut
mg,Ξ =
εJmg
.
Usando las variables normalizadas se obtiene:
Y = sinφUt −cosφΞUm
Z = −cosφUt −sinφΞUm+1φ = Um
Luego, el sistema en su representacion espacio de estados es:
ddt
YZφYZφ
=
YZφ
sinφUt −cosφΞUm
−cosφUt −sinφΞUm+1Um

11.2 Problemas Capıtulo 2 167
donde
YZφYZφ
es el vector de estados y
[Ut
Um
]
es el vector de entradas de control.
3. Determinar el/los punto/s de operacion del PTVOL. ¿Cual es la implicancia del punto de operacion?Para calcular los puntos de equilibrio igualamos a cero las derivadas, asi:
ddt
YZφYZφ
= 0=
Ye
Ze
φe
sinφeUte−cosφeΞUme
−cosφeUte−sinφeΞUme+1Ume
.
Lo que resulta en:Ye = 0Ze = 0φe = 0
Ume= 0→Ume= 0sinφeUte−cosφeΞUme= 0→ sinφeUte = 0
−cosφeUte−sinφeΞUme+1= 0→ cosφeUte = 1
Si elegimosUte = 0→ de cosφeUte = 1→ 0= 1? (inconsistente!). Luego launica opcion es que cosφe = 1, lo cualse cumple paraφe = kπ, k∈ Z.
4. Elija un punto de operacion para la linealizacion del sistema. Represente el sistema linealizado en su forma espaciode estados.Elegimos el punto de operacion (Ye,Ze,φe,Ye, Ze, φe,Ute,Ume) = (Ye,Ze,0,0,0,0,0,1).Identificamos apropiadamente a las funciones que usaremos para las derivadas:
ddt
YZφYZφ
=
YZφ
sinφUt −cosφΞUm
−cosφUt −sinφΞUm+1Um
=
f1(Y,Z,φ ,Y, Z, φ)f2(Y,Z,φ ,Y, Z, φ)f3(Y,Z,φ ,Y, Z, φ)f4(Y,Z,φ ,Y, Z, φ)f5(Y,Z,φ ,Y, Z, φ)f6(Y,Z,φ ,Y, Z, φ)
Derivando apropiadamente para formar las matricesA y B:
ddt
YZφ˜Y˜Z˜φ
=
∂ f1∂Y
∂ f1∂Z
∂ f1∂φ
∂ f1∂Y
∂ f1∂ Z
∂ f1∂ φ
∂ f2∂Y
∂ f2∂Z
∂ f2∂φ
∂ f2∂Y
∂ f2∂ Z
∂ f2∂ φ
∂ f3∂Y
∂ f3∂Z
∂ f3∂φ
∂ f3∂Y
∂ f3∂ Z
∂ f3∂ φ
∂ f4∂Y
∂ f4∂Z
∂ f4∂φ
∂ f4∂Y
∂ f4∂ Z
∂ f4∂ φ
∂ f5∂Y
∂ f5∂Z
∂ f5∂φ
∂ f5∂Y
∂ f5∂ Z
∂ f5∂ φ
∂ f6∂Y
∂ f6∂Z
∂ f6∂φ
∂ f6∂Y
∂ f6∂ Z
∂ f6∂ φ
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Y =Ye
Z = Ze
φ = φe
Y = Ye
Z = Ze
φ = φe
Ut =Ute
Um =Ume
YZφ˜Y˜Z˜φ
+
∂ f1∂Ut
∂ f1∂Um
∂ f2∂Ut
∂ f2∂Um
∂ f3∂Ut
∂ f3∂Um
∂ f4∂Ut
∂ f4∂Um
∂ f5∂Ut
∂ f5∂Um
∂ f6∂Ut
∂ f6∂Um
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
Y =Ye
Z = Ze
φ = φe
Y = Ye
Z = Ze
φ = φe
Ut =Ute
Um =Ume
[Ut
Um
]

168 11 Problemas propuestos y resueltos
Luego:
ddt
YZφ˜Y˜Z˜φ
=
0 0 0 1 0 00 0 0 0 1 00 0 0 0 0 10 0 cosφUt +sinφΞUm 0 0 00 0 sinφUt −cosφΞUm 0 0 00 0 0 0 0 0
∣∣∣∣∣∣∣∣∣∣
Y =Ye
Z = Ze
φ = φe
Y = Ye
Z = Ze
φ = φe
Ut =Ute
Um =Ume
YZφ˜Y˜Z˜φ
+
0 00 00 0
sinφ −cosφΞ−cosφ −sinφΞ
0 1
∣∣∣∣∣∣∣∣∣∣
Y =Ye
Z = Ze
φ = φe
Y = Ye
Z = Ze
φ = φe
Ut =Ute
Um =Ume
[
Ut
Um
]
y:
ddt
YZφ˜Y˜Z˜φ
=
0 0 0 1 0 00 0 0 0 1 00 0 0 0 0 10 0 0 0 0 00 0−Ξ 0 0 00 0 0 0 0 0
YZφ˜Y˜Z˜φ
+
0 00 00 00 −Ξ−1 00 1
[Ut
Um
]
Problema 2.3: masa-resorte-amortiguador
Para el sistema masa-resorte no lineal-amortiguador nolineal mostrado en la Fig.(2.3) se pide:
1. Calcular el punto de equilibrio del sistema parafe=16.
2. Escribir la representacion lineal del sistema con re-specto al punto de equilibrio antes calculado.
LINEARIZATION EXAMPLE
(2.3) masa-resorte no lineal-amortiguador
La ecuacion de movimiento del sistema es:
Mx+B(x3+ x)+K|x|x= 16+cosωt
La correspondiente representacion espacio de estados es:
ddt
[xx
]
=
[x
− BM(x3+ x)− K
M|x|x+ 16
M+
1M
cosωt
]
Representacion lineal del sistema en relacion a una excitacion promediof (t) = 16:
En el punto de equilibrio se cumple:ue = 16, |xe|xe =16K→ xe =
4√K
ddt
[x˙x
]
=
[0 1
−2KM|x| − B
M(3x2+1)
]∣∣∣∣∣pto equilibrio
[x˙x
]
+
[01M
]
cosωt
Luego:
ddt
[x˙x
]
=
0 1
−8√
KM− B
M
[x˙x
]
+
[01M
]
cosωt

11.2 Problemas Capıtulo 2 169
con: ˙x(0) = 0 y x(0) = x(0)−xe(0) = 0− 4√K
=− 4√K
Problema 2.4: circuito no lineal
Para el sistema mostrado en la Fig.(2.4) sepide:
1. Calcular el punto de equilibrio del sis-tema paraVe = 2.
2. Escribir la representacion lineal delsistema con respecto al punto de equi-librio antes calculado.
STATE-SPACE LINEARIZATION EXAMPLE (Close, Frederick & Newell, Example 9.9)
(2.4) circuito no lineal
Problema 2.5: Control de rapidez
La dinamica del sistema de control es:
mdvdt
= αnuT(αnv)︸ ︷︷ ︸
F
+−mgCrsgn(v)− 12
ρCdAv2−mgsinθ︸ ︷︷ ︸
Fd
,
dondeF representa la fuerza generada por el motor yFd representa la friccion alrodamiento, el arrastre aerodinamico y la fuerza gravitacional, ver Fig.(5). El torqueT(αnv) = T(ω) = Tm(1− β ( ω
ωm− 1)2), dondeTm es el torque maximo obtenido
a la velocidad angular del motorωm. Parametros tipicos sonTm = 190Nm,ωm =420rad/s (para 4000 rpm) yβ = 0,4. Otros valores tıpicos:α4 = 12,ρ = 1,3 kg/m3,Cr = 0,01,Cd = 0,32,A= 2,4m2, m= 1000kg.
gF
mg
F
θ
(2.5) Vehıculo sobre una pendiente, modelo paracontrol crucero
1. Existe un punto de equilibrio (ve,ue,θe) donde la fuerza aplicada por el motor balancea las fuerzas de disturbio.Calcular la entradaue para un viaje en cuarta conve = 25m/s,θe = 0. Rpta: ue = 0,1687.
2. Para el punto (ve,ue,θe), verificar que el modelo lineal esta resulta:dvdt
=−0,0101v+1,32u−9,8θ .
3. Definir la salidav para el sistema lineal antes calculado.4. Si se cierra el lazo de control con ˜u=−0,5v−0,1z, donde ˙z= v. Mostrar el diagrama de bloques del sistema (como
representarıa esta ley de control en Matlab/Simulink).5. Escribir la representacion espacio de estados del sistema controlado, con estados ˜v y z. Incluir la ecuacion de salida.
Problema 2.6: LinealizacionSe cumple 0=Cm(0,0, δe), δe =cte. Responder segun corresponda:
1. Presentar el diagrama de bloques del sistema autopiloto destacando los elementos basicos del sistema de control.Incluir todas las variables dadas.A continuacion el diagrama de bloques del sistema.
2. Escribir la ecuacion de movimiento rotacional (cabeceo) de la aeronave en su forma espacio de estados. Incluir laecuacion de salida.Escribiendo la dinamica rotacional del sistema:
Jθ = MJθ = 1
2CmρV2ScJθ = 1
2Cm(θ , θ ,δe)ρV2Sc
Representacion espacio de estados:
ddt
[θθ
]
=
[θ
12J
Cm(θ , θ ,δe)ρV2Sc
]
y = f (θ)
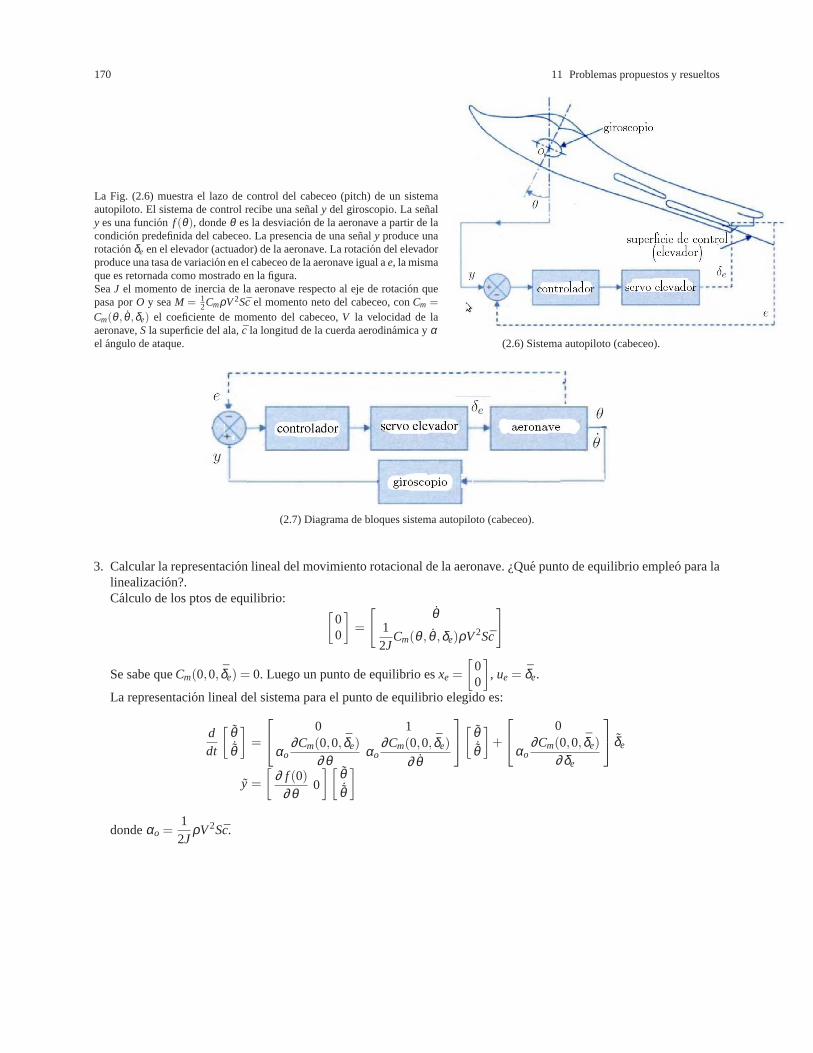
170 11 Problemas propuestos y resueltos
La Fig. (2.6) muestra el lazo de control del cabeceo (pitch) de un sistemaautopiloto. El sistema de control recibe una senal y del giroscopio. La senaly es una funcion f (θ), dondeθ es la desviacion de la aeronave a partir de lacondicion predefinida del cabeceo. La presencia de una senal y produce unarotacionδe en el elevador (actuador) de la aeronave. La rotacion del elevadorproduce una tasa de variacion en el cabeceo de la aeronave igual ae, la mismaque es retornada como mostrado en la figura.SeaJ el momento de inercia de la aeronave respecto al eje de rotacion quepasa porO y seaM = 1
2CmρV2Sc el momento neto del cabeceo, conCm =
Cm(θ , θ ,δe) el coeficiente de momento del cabeceo,V la velocidad de laaeronave,S la superficie del ala, ¯c la longitud de la cuerda aerodinamica yαel angulo de ataque. (2.6) Sistema autopiloto (cabeceo).
(2.7) Diagrama de bloques sistema autopiloto (cabeceo).
3. Calcular la representacion lineal del movimiento rotacional de la aeronave. ¿Que punto de equilibrio empleo para lalinealizacion?.Calculo de los ptos de equilibrio:
[00
]
=
[θ
12J
Cm(θ , θ ,δe)ρV2Sc
]
Se sabe queCm(0,0, δe) = 0. Luego un punto de equilibrio esxe =
[00
]
, ue = δe.
La representacion lineal del sistema para el punto de equilibrio elegido es:
ddt
[θ˙θ
]
=
0 1
αo∂Cm(0,0, δe)
∂θαo
∂Cm(0,0, δe)
∂ θ
[θ˙θ
]
+
0
αo∂Cm(0,0, δe)
∂δe
δe
y =
[
∂ f (0)∂θ
0
][θ˙θ
]
dondeαo =12J
ρV2Sc.

11.3 Problemas Capıtulo 3 171
11.3. Problemas Capıtulo 3
Problema 3.1: Analisis sistemas linealesResponder segun corresponda:
1. Sea el sistema:dxdt
=
[0 10 0
]
x+
[10
]
u
y =[
1 0]x
, con ley de control:u=−Kx+kr r.
Demostrar que los polos del sistema en lazo cerrado no puedenser asignados arbitrariamente.2. Considerar el sistema mostrado en la Fig. (3.1).
La dinamica de cada uno de los subsistemas se puede escribir como:
dxdt
= Ax+Bu1
y1 =Cx,
dzdt
= Az+Bu2
y2 =Cz.
Demostrar que el sistema formado por los dos subsistemas identicos, con entradau=
[u1 u2
]Ty salida igual ay= y1+y2, no es observable. (3.1) Salida formada por la suma de salidasy1 y y2
Problema 3.2: Control de posicion de cuchilla
Maquinas tipo torno son controladas automaticamente(ver Fig.(3.2)). Considerando un eje, la posicion desea-da de la cuchilla se compara con la posicion actual yesta informacion es usada para activar una bobina, lacual controla la presion dentro del actuador hidraulico.
El sistema actuador-cuchilla esta descrito por:
Gxy(s) =X(s)Y(s)
=1
s(0,5s+1).
El voltaje de salida del amplificador es:
Eo(s) = AE(s) = A[Rd(s)−X(s)]
128 INTRODUCTION TO CONTROL ENGINEERING
Eo i
RL
Differenceamplifier
A
Spring, K
rd
yFluid supply
Position feedback x
Cutting tool
Work piece
(a)
G(s)+– Tool position
R (s)d A 1R + sL
E (s)o I(s)– KK2
F(s) Y(s) X(s)
(b)
Fig. P4.7 (a) Tool position control, (b) Block diagram
(3.2) Control de posicion de la cuchilla
donderd(t) es la posicion deseada de la cuchilla ye(t) es el error entre la posicion deseada y la posicion medida. Lafuerza en el eje actuador es proporcional a la corrientei(t) tal queF = K2i(t) dondeK2 = 2,0. La fuerza es balanceadacontra el resorte,F =−Ky(t), dondeK = 1,2 es la constante del resorte, yR= 10 Ω y L = 0,5 H. SeaA= 6,95.
1. Graficar el diagrama de bloques del sistema de control de posicion de cuchilla.2. Expresar la funcion de transferencia actuador-cuchilla en su forma canonica modal.3. Calcular la matriz de transicioneAt = L −1(sI−A)−1 para la representacion espacio de estados antes calculada.4. Para el sistema en lazo cerrado (entradard(t), salidax(t)), determinar la correspondiente forma canonica contro-
lable.

172 11 Problemas propuestos y resueltos
Problema 3.3: Efecto integral
Un velero de masamse encuentra inicialmente en reposo,v(0) = 0. En el tiempot = 0, se presentaun fuerte viento de magnitudVo = 10 m/s.Asumir que la fuerza del viento sobre las velas es en la direccion del viaje y esta dado porFw(t) =bw[Vo−v(t)]. Asumir que el arrastre viscoso del agua sobre el velero esta dado porFd(t) = bdv(t). (3.3) Diagrama del velero
1. Escribir la ecuacion de movimiento del velero en la forma de espacio de estados.Usar como variable de estado a lavelocidadv(t). Asumir que se puede medirv(t).
2. Para las condiciones dadas en el enunciado del problema, calcular la velocidad del velero en estado estacionario.¿Es la velocidad del velero menor que 10 m/s?
Ayuda. Sea el sistema:
x = Ax+Bu, x(0) = xo
y =Cx+Du, si u(t) =
0 t = 0,
u= cte t > 0,, la salida del sistema esta dada por:
y(t) =CeAtx(0)+CA−1eAtBu+D−CA−1Bu.
3. Si el objetivo es mover el velero a una velocidadvr(t), ¿que modificacion debemos realizar a la ecuacion demovimiento? Mostrar que con control integral es posible seguir una velocidad de referenciavr(t) =cte.
Problema 3.4: Preguntas variadas
1. ¿Cual es la principal ventaja de un diseno de control por realimentacion de estados en relacion a un diseno de controlproporcional o proporcional derivativo (PD) usado en control clasico?
2. Defina cada termino en las expresiones dadas abajo.
Sea el sistema:
x = Ax+Bu, x(0) = xo
y =Cx+Du, la solucion y la salida estan dadas por:
x(t) = eAtx(0)︸ ︷︷ ︸
?
+∫ t
0eA(t−τ)Bu(τ)dτ
︸ ︷︷ ︸
?
y(t) =CeAtx(0)+∫ t
0CeA(t−τ)B︸ ︷︷ ︸
?
u(τ)dτ
3. Mencione dos formas de obtener la matriz de funciones de transferencia del sistema
x = Ax+Bu, x(0) = xo
y =Cx+Du.
Explique que representa la funcion de transferencia.
4. Pruebe que, para el sistema
x = Ax+Bu, x(0) = xo
y =Cx+Du, los autovalores de la matrizA son los polos del sistema.
5. Pruebe que, para una realizacion espacio de estados de ordenn en la forma canonica modal, la matriz de controla-bilidad es de la forma:
Wc =
.. ....
......
0 0 1 . . .0 1 −an−1 . . .1 −an−1 −a2
n−1−an−2 . . .

11.3 Problemas Capıtulo 3 173
dondea1,a2, . . . son los coeficientes del polinomio caracterıstico sn + an−1sn−1 + an−2sn−2 + . . . . Asuma que elsistema solo tiene una entrada.
6. ¿Existe alguna limitacion practica en los valores seleccionados para las gananciasK del control por realimentacionde estadosu=−Kx? En otras palabras, analice que pasa con la senal de controlu si se eligen polos en lazo cerradomuy alejados del eje imaginario.
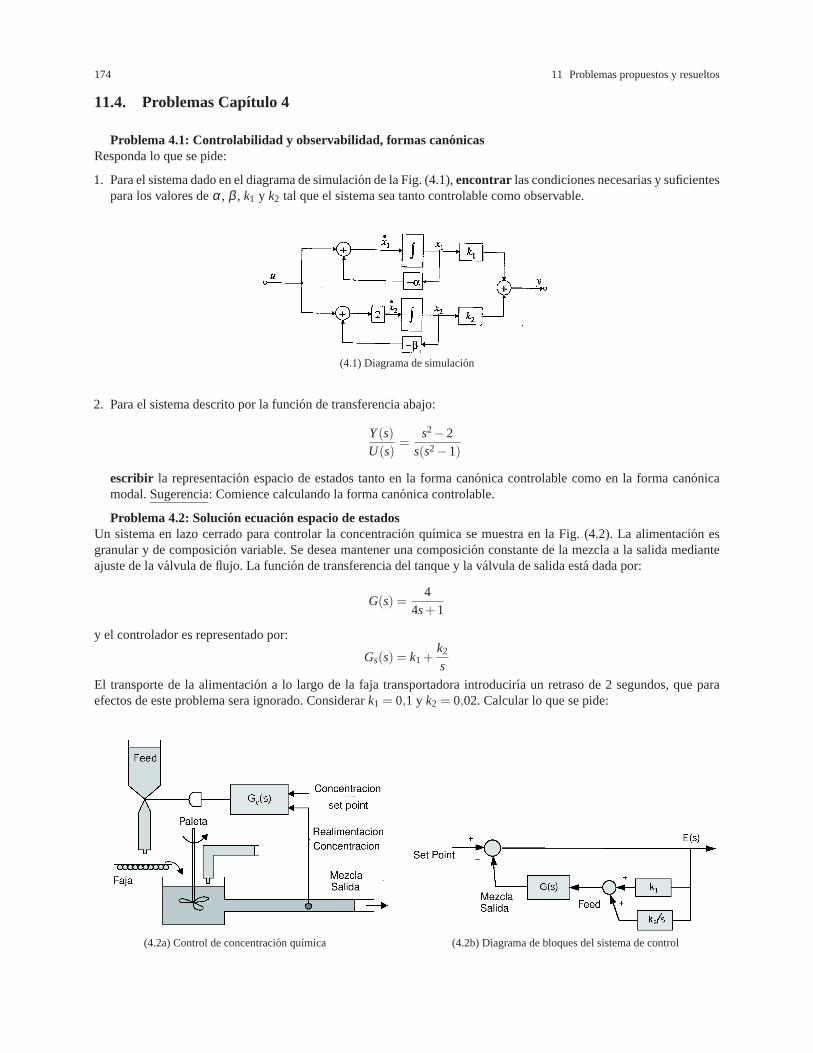
174 11 Problemas propuestos y resueltos
11.4. Problemas Capıtulo 4
Problema 4.1: Controlabilidad y observabilidad, formas canonicasResponda lo que se pide:
1. Para el sistema dado en el diagrama de simulacion de la Fig. (4.1),encontrar las condiciones necesarias y suficientespara los valores deα, β , k1 y k2 tal que el sistema sea tanto controlable como observable.
(4.1) Diagrama de simulacion
2. Para el sistema descrito por la funcion de transferencia abajo:
Y(s)U(s)
=s2−2
s(s2−1)
escribir la representacion espacio de estados tanto en la forma canonica controlable como en la forma canonicamodal. Sugerencia: Comience calculando la forma canonica controlable.
Problema 4.2: Solucion ecuacion espacio de estadosUn sistema en lazo cerrado para controlar la concentracion quımica se muestra en la Fig. (4.2). La alimentacion esgranular y de composicion variable. Se desea mantener una composicion constante de la mezcla a la salida medianteajuste de la valvula de flujo. La funcion de transferencia del tanque y la valvula de salida esta dada por:
G(s) =4
4s+1
y el controlador es representado por:
Gs(s) = k1+k2
s
El transporte de la alimentacion a lo largo de la faja transportadora introducirıa un retraso de 2 segundos, que paraefectos de este problema sera ignorado. Considerark1 = 0,1 y k2 = 0,02. Calcular lo que se pide:
(4.2a) Control de concentracion quımica (4.2b) Diagrama de bloques del sistema de control

11.4 Problemas Capıtulo 4 175
1. ¿En que punto del diagrama de bloques (Fig. 4.2a) se debe incluir elretraso?2. Cerrar el lazo de control y expresar la funcion de transferencia en lazo cerrado en su forma canonica modal. ¿Es el
sistema estable?3. Obtener la expresion para la saliday(t) asumiendo que la entrada (set point) es un escalon de magnitud unitaria y
que el vector de estados inicial esqo = [0,5,0,0]T .4. Expresar la funcion de transferencia en lazo cerrado en su forma canonica observable.
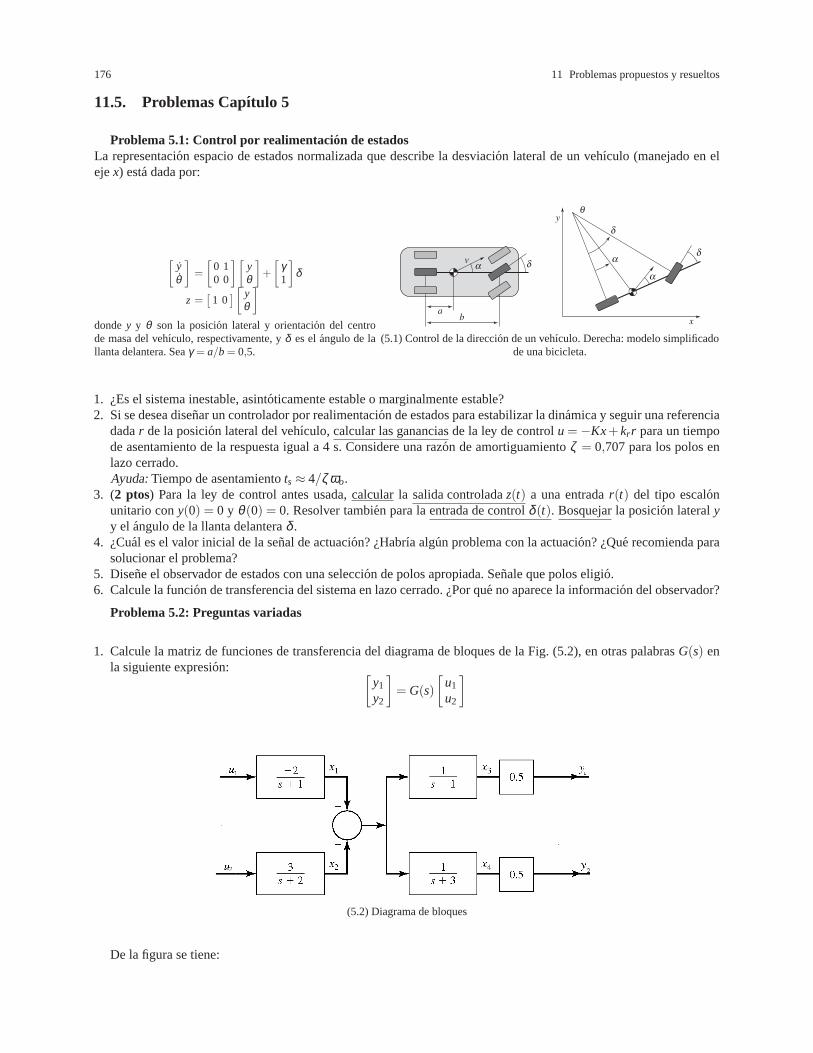
176 11 Problemas propuestos y resueltos
11.5. Problemas Capıtulo 5
Problema 5.1: Control por realimentacion de estadosLa representacion espacio de estados normalizada que describe la desviacion lateral de un vehıculo (manejado en elejex) esta dada por:
[yθ
]
=
[0 10 0
][yθ
]
+
[γ1
]
δ
z =[
1 0][
yθ
]
dondey y θ son la posicion lateral y orientacion del centrode masa del vehıculo, respectivamente, yδ es elangulo de lallanta delantera. Seaγ = a/b= 0,5.
ab
α δv
y
x
α
α
δ
δ
θ
(5.1) Control de la direccion de un vehıculo. Derecha: modelo simplificadode una bicicleta.
1. ¿Es el sistema inestable, asintoticamente estable o marginalmente estable?2. Si se desea disenar un controlador por realimentacion de estados para estabilizar la dinamica y seguir una referencia
dadar de la posicion lateral del vehıculo, calcular las gananciasde la ley de controlu=−Kx+kr r para un tiempode asentamiento de la respuesta igual a 4 s. Considere una razon de amortiguamientoζ = 0,707 para los polos enlazo cerrado.Ayuda:Tiempo de asentamientots≈ 4/ζ ωo.
3. (2 ptos) Para la ley de control antes usada, calcularla salida controladaz(t) a una entradar(t) del tipo escalonunitario cony(0) = 0 y θ(0) = 0. Resolver tambien para la entrada de controlδ (t). Bosquejarla posicion lateralyy el angulo de la llanta delanteraδ .
4. ¿Cual es el valor inicial de la senal de actuacion? ¿Habrıa algun problema con la actuacion? ¿Que recomienda parasolucionar el problema?
5. Disene el observador de estados con una seleccion de polos apropiada. Senale que polos eligio.6. Calcule la funcion de transferencia del sistema en lazo cerrado. ¿Por que no aparece la informacion del observador?
Problema 5.2: Preguntas variadas
1. Calcule la matriz de funciones de transferencia del diagrama de bloques de la Fig. (5.2), en otras palabrasG(s) enla siguiente expresion:
[y1
y2
]
= G(s)
[u1
u2
]
(5.2) Diagrama de bloques
De la figura se tiene:

11.5 Problemas Capıtulo 5 177
y1 =−1
(s−1)(s+1)u1+
1,5(s−1)(s+2)
u2
y2 =−1
(s+3)(s+1)u1+
1,5(s+3)(s+2)
u2
Agrupando terminos:
[y1
y2
]
=
−1(s−1)(s+1)
1,5(s−1)(s+2)
−1(s+3)(s+1)
1,5(s+3)(s+2)
[u1
u2
]
¿Como seria llevarG(s) a su forma espacio de estados?Idea: Ver el problema a continuacion.
2. Un sistema compuesto por dos subsistemas conectados en cascada es mostrado en la Fig. (5.3). Sean las variables deestado del sistemax1 = y1−u1 y x2 = y2. Asumir que la entrada al sistema esu= u1 y que la salida esy= y2. Obtenerel modelo de espacio de estados del sistema interconectado.¿Cuando es el sistema no controlable? Encontrar lafuncion de transferencia del sistema no controlable.Sugerencia:Usar transformada de Laplace inversa en cada uno de los bloques.
u1 y1 u2 y2
yu
s a
s b
1
s c
(5.3) Diagrama de bloques
Del diagrama de bloques se tienen las siguientes funciones de transferencia:
y1 =s+as+b
u1
y2 =1
s+cu2 =
1s+c
y1
Usando transformada de Laplace inversa:y1+by1 = u1+au1
y2+cy2 = y1
Reescribiendo las ecuaciones parax1 = y1−u1 y x2 = y2:
y1− u =−by1+au1
y2 = y1−cy2
x1 =−b(x1+u1)+au1
x2 = x1+u1−cx2
En la forma espacio de estados el sistema interconectado queda como:[
x1
x2
]
=
[−b 01 −c
][x1
x2
]
+
[a−b
1
]
u
y =[
0 1][
x1
x2
]
Analizando la controlabilidad del sistema:
Wc =[
B AB]=
[a−b −b(a−b)
1 a−b−c
]
El sistema es no controlable si det(Wc) = (a−c)(a−b) = 0.

178 11 Problemas propuestos y resueltos
3. Considere la planta con la siguiente representacion espacio de estados:
x =
[−2 −11 0
]
x+
[10
]
u
y =[
0 1]x+Du
Usar la formula de Ackerman para para disenar un control por realimentacion de estadosu=−Kx+kr r tal que lospolos en lazo cerrado se ubiquen ens= −2,−2. (EncontrarK y kr )Usando la formula de Ackerman:
K = q1αc(A)
dondeq1 es laultima fila de la inversa de la matriz de controlabilidad yαc(s) es la ecuacion caracterıstica delsistema en lazo cerrado.La matriz de controlabilidad es:
Wc =
[1 −20 1
]
W−1c =
[1 20 1
]
luego:q1 =[
0 1]
La ecuacion caracterıstica:αc(s) = (s+2)(s+2) = s2+4s+4
Entonces:
K =[
0 1]
([−2 −11 0
]2
+4
[−2 −11 0
]
+4
[1 00 1
])
La ganancia de alimentacion directa o prefiltroKr :
kr =−1/(C(A−BK)−1B)← revisar!
4. Considere la planta del problema anterior, calcular los ceros de transmision del sistema:
x =
[−2 −11 0
]
x+
[10
]
u
y =[
0 1]x+u
Los ceros de transmision del sistema se calculan resolviendo parasen la siguiente ecuacion:
det
([−sI+A B
C D
])
= 0
det
−s−2 −1 11 −s 00 1 1
= 0
Algunas definiciones:Sistema de fase mınima: ceros de la funcion de transferencia a la izquierda del semiplano complejo abierto.
Problema 5.3: Controlabilidad
1. ¿Es el sistema completamente controlable? Fundamente surespuesta sin calcularla matriz de controlabilidad.2. ¿Para que valores dea se garantiza la estabilidad asintotica del sistema? ¿Para que valores dea y b es el sistema
estabilizable?3. ¿Para que valor dea el sistema no es completamente observable?
Problema 5.4: Control por realimentacion de estados, entradas constantesResponda lo que se pide:

11.5 Problemas Capıtulo 5 179
Considerar el sistema lineal:
x(t) =
1 0 a0 −5 0−1 0 −2
x(t)+
b01
u(t)
y =[
1 1 0]x(t)
(5.4) Estructura del sistema
1. Describir dos formas en que la entrada de referencia puede ser introducidaen un sistema de control por reali-mentacion de estados de tal forma que la respuesta tenga error cero enestado estacionario para cambios del tipoescalon en la senal de referencia. Fundamente su respuesta. Nota: No incluir control integral en esta parte. Una leyde control serıa la presentada en claseu=−Kx+kr r, la otra queda a su criterio!
2. Describir como control integral puede ser introducido en un sistema decontrol por realimentacion de estados detal forma que se tenga la respuesta en estado estacionario con error cero tanto para senales de referencia comodisturbios en la planta del tipo escalon.
Problema 5.5: Control por realimentacion de estados - unidad de cinta)Las ecuaciones de movimiento de un mecanismo de unidad de cinta mostrado en la Fig. (6.4) estan dadas por:
x =
0 2 0 0 0−0,1 −0,35 0,1 0,1 0,75
0 0 0 2 00,4 0,4 −0,4 −1,4 00 −0,03 0 0 −1
x+
00001
u
y =[
0,5 0 0,5 0 0]x
donde los elementos del vector de estadosx sonx1 (posicion de la cinta en el cabrestante),ω1 (velocidad de la ruedade conduccion), x2 (posicion de la cinta en el codificador),ω2 (velocidad de salida), yi (corriente en el motor delcabrestante). La entrada de controlu es el voltaje aplicadoe, y la saliday es la posicion del cabezal de lectura/escriturax3.
Se ha decidido implementar un controlador por realimentacion de estados, con una ley de control de la formau=−Kx+kr r, dondeK es la ganancia de control ykr es una ganancia de alimentacion directa. La respuesta deseadaa una referencia del tipo escalon debe tener un sobreimpulso pequeno y un tiempo se establecimiento de 1 segundo.Esto puede ser alcanzado usando una ecuacion caracterıstica de la forma:
αc(λ ) = (λ 2+2ζ ωo1λ +ω2o1)(λ 2+2ζ ωo2λ +ω2
o2)(λ +ζ ωo1)
conζ = 0,8, ωo1 = 6 y ωo2 = 8. Se pide:
1. Calcular la funcion de transferencia deu hastay.2. Determinar la estabilidad del sistema.3. Antes de calcular el controlador,verificar la controlabilidad del sistema.4. Determinar la ganancia de controlK del sistema. Muestre los detalles de calculo.5. Determinar el valor de la gananciakr
6. Incluir control integral en el diseno del controlador, ¿cuales serıan las ganancias de control (K, ki) y de alimentaciondirecta (kr )?
Problema 5.6: Microscopio de fuerza atomica (AFM, por sus siglas en ingles)El AFM es una de las principales herramientas en generacion de imagenes, medidas y manipulacion de materia en lananoescala. La informacion es colectada “palpando” la superficie de la muestra (sample) con una sonda mecanica (vigavoladiza con punta conica). La muestra se puede mover vertical y horizontalmente usando un elemento piezoelectrico.

180 11 Problemas propuestos y resueltos
(5.5) Unidad de cinta
Cuando la muestra se acerca a la punta de la viga, fuerzas de interaccion entre la muestra y la punta conllevan a unadeflexion de la viga voladiza. La deflexion es medida usando un rayo laser reflejado desde la parte superior de la vigavoladiza que va hacia un arreglo de fotodiodos. La deflexion de la viga es controlada por realimentacion usando unactuador piezolectrico que controla la posicion vertical de la muestra. Un diagrama esquematico del AFM se muestraen la figura (a) abajo.
Una representacion esquematica del movimiento vertical del piezoelectrico se presenta en la figura (b) abajo. Elmodelo muestra dos masas separadas por un piezoelectrico ideal. La masam1 es la mitad del sistema piezoelectrico, yla masam2 es la otra mitad del sistema piezoelectrico mas la masa del apoyo. Este modelo asume que el piezoelectricogenera una fuerzaF entre las masas y que existe cierto amortiguamiento viscosoc2 junto al resorte de rigidezk2. Seanlas posiciones de los centros de masaz1 y z2.
Considere el modelo de la dinamica vertical del AFM. La dinamica basica esta dada por la ecuacion:
(m1+m2)d2z1
dt2+c2
dz1
dt+k2z1 = m2
d2ldt2
+c2dldt
+k2l ,
dondel = z1−z2 es la elongacion del elemento piezoelectrico. El piezoelectrico puede ser modelado como un sistemade segunda orden con una frecuencia naturalω3 y razon de amortiguamientoζ3. La dinamica acoplada es luego descritapor el sistema lineal:
dxdt
=
0 1 0 0−k2/(m1+m2) −c2/(m1+m2) 1/m2 0
0 0 0 ω3
0 0 −ω3 −2ζ3ω3
x+
000
ω23
u
y =m2
m2+m1
[m1k2
m1+m2
m1c2m1+m2
1 0
]
x
donde la senal de entradau es la senal que llega del amplificador y la saliday es la elongacion del piezoelectrico. Losparametros del sistema:m1 = 0,1510−3kg, m2 = 110−3kg, k2 = 6,832107N/m, ω3 = 7,5398105rad/s,ζ3 = 0,1.
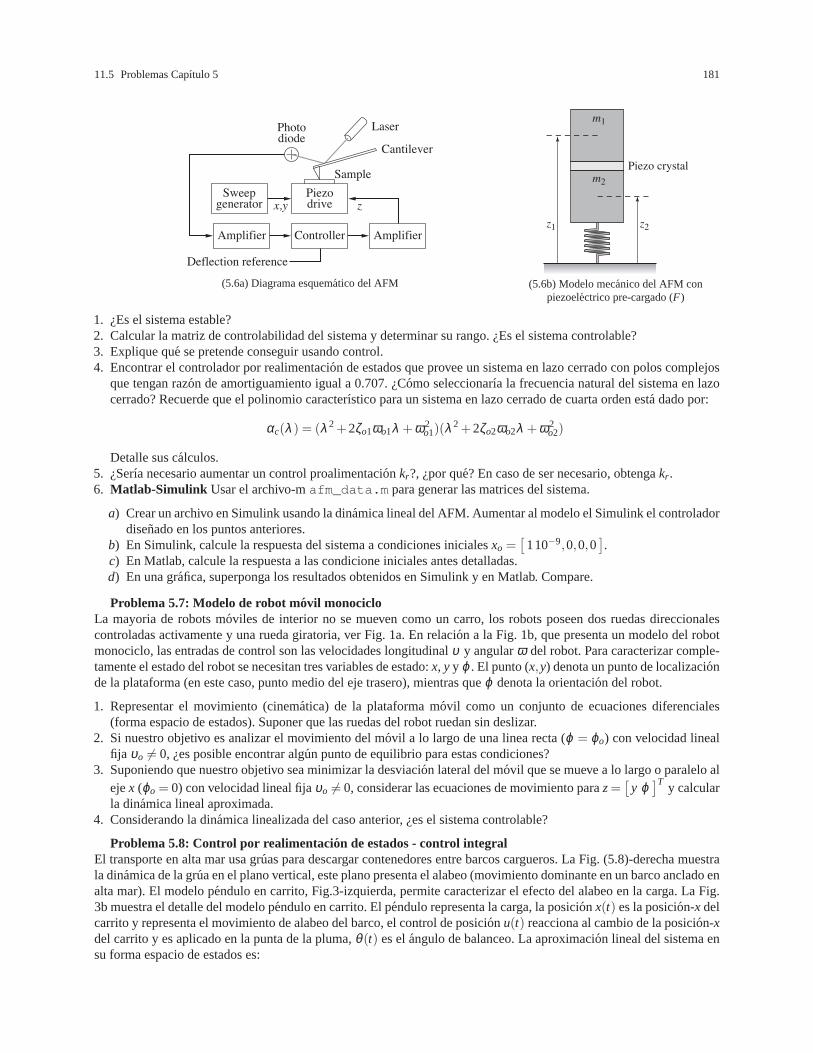
11.5 Problemas Capıtulo 5 181
Amplifier Amplifier
Sample
Cantilever
x,y z
LaserPhotodiode
Controller
Piezodrive
Deflection reference
Sweepgenerator
(5.6a) Diagrama esquematico del AFM
Piezo crystal
z1 z2
m1
m2
(b) Mechanical model(5.6b) Modelo mecanico del AFM conpiezoelectrico pre-cargado (F)
1. ¿Es el sistema estable?2. Calcular la matriz de controlabilidad del sistema y determinar su rango. ¿Es el sistema controlable?3. Explique que se pretende conseguir usando control.4. Encontrar el controlador por realimentacion de estados que provee un sistema en lazo cerrado con polos complejos
que tengan razon de amortiguamiento igual a 0.707. ¿Como seleccionarıa la frecuencia natural del sistema en lazocerrado? Recuerde que el polinomio caracterıstico para un sistema en lazo cerrado de cuarta orden esta dado por:
αc(λ ) = (λ 2+2ζo1ωo1λ +ω2o1)(λ 2+2ζo2ωo2λ +ω2
o2)
Detalle sus calculos.5. ¿Serıa necesario aumentar un control proalimentacion kr?, ¿por que? En caso de ser necesario, obtengakr .6. Matlab-Simulink Usar el archivo-mafm_data.m para generar las matrices del sistema.
a) Crear un archivo en Simulink usando la dinamica lineal del AFM. Aumentar al modelo el Simulink el controladordisenado en los puntos anteriores.
b) En Simulink, calcule la respuesta del sistema a condiciones inicialesxo =[
110−9,0,0,0].
c) En Matlab, calcule la respuesta a las condicione inicialesantes detalladas.d) En una grafica, superponga los resultados obtenidos en Simulink y en Matlab. Compare.
Problema 5.7: Modelo de robot movil monocicloLa mayoria de robots moviles de interior no se mueven como un carro, los robots poseen dos ruedas direccionalescontroladas activamente y una rueda giratoria, ver Fig. 1a.En relacion a la Fig. 1b, que presenta un modelo del robotmonociclo, las entradas de control son las velocidades longitudinal υ y angularω del robot. Para caracterizar comple-tamente el estado del robot se necesitan tres variables de estado:x, y y ϕ. El punto (x,y) denota un punto de localizacionde la plataforma (en este caso, punto medio del eje trasero),mientras queϕ denota la orientacion del robot.
1. Representar el movimiento (cinematica) de la plataforma movil como un conjunto de ecuaciones diferenciales(forma espacio de estados). Suponer que las ruedas del robotruedan sin deslizar.
2. Si nuestro objetivo es analizar el movimiento del movil a lo largo de una linea recta (ϕ = ϕo) con velocidad linealfija υo 6= 0, ¿es posible encontrar algun punto de equilibrio para estas condiciones?
3. Suponiendo que nuestro objetivo sea minimizar la desviacion lateral del movil que se mueve a lo largo o paralelo alejex (ϕo = 0) con velocidad lineal fijaυo 6= 0, considerar las ecuaciones de movimiento paraz=
[y ϕ]T
y calcularla dinamica lineal aproximada.
4. Considerando la dinamica linealizada del caso anterior, ¿es el sistema controlable?
Problema 5.8: Control por realimentacion de estados - control integralEl transporte en alta mar usa gruas para descargar contenedores entre barcos cargueros. LaFig. (5.8)-derecha muestrala dinamica de la grua en el plano vertical, este plano presenta el alabeo (movimiento dominante en un barco anclado enalta mar). El modelo pendulo en carrito, Fig.3-izquierda, permite caracterizarel efecto del alabeo en la carga. La Fig.3b muestra el detalle del modelo pendulo en carrito. El pendulo representa la carga, la posicionx(t) es la posicion-x delcarrito y representa el movimiento de alabeo del barco, el control de posicionu(t) reacciona al cambio de la posicion-xdel carrito y es aplicado en la punta de la pluma,θ(t) es elangulo de balanceo. La aproximacion lineal del sistema ensu forma espacio de estados es:

182 11 Problemas propuestos y resueltos
Fig. (5.7a) Robot del tipo monociclo Fig. (5.7b) Modelo robot movil monociclo
Fig.(5.8a) Pendulo en carrito para modelar alabeo del barco carguero Fig. (5.8b) Modelo pendulo en carrito
ddt
[θθ
]
=
[0 1
−0,280 0
][θθ
]
+
[0
−0,0286
]
u+
[0
−0,0286
]
x
1. ¿Es el sistema estable? ¿Es el sistema controlable?2. Disenar el controlador por realimentacion de estados tal que las oscilaciones del pendulo sean neutralizadas. Para
esto usar una ley de control de la forma:u(t) =−x(t)+δu(t).
Esta ley se puede seleccionar debido a que se cuenta con la informacion de los acelerometros ¨x. Luego es posiblecentrarse solo en el calculo deδ u, que puede tomarse como:
δ u(t) =−K
[θθ
]
,
y que permitira incrementar el amortiguamiento del sistema aζ = 0,707 (ωn = |λ (A)|).Presentar el diagrama de bloques del sistema en lazo cerradocorrespondiente a usar las leyes de control antesdescritas.
3. Suponiendo que no se pudiese cancelar el efecto de la aceleracion inducida por el mar (que es la que causa elalabeo), ¿que ley de control elegirıa para resolver el problema cuando ¨x = ao =cte? Fundamente por que la leyde control elegida cumplirıa el objetivo de neutralizar las oscilaciones. Use diagrama de bloques para indicar quemodificaciones se le haria a la planta y/o controlador del caso anterior.
Problema 5.9: Control por ubicacion de polos
1. Escribir la ecuacion espacio de estados del sistema carro cohete. Usar las variables de estadox1 = y (posicion) yx2 = y (velocidad). ¿Es el sistema controlable y observable? ¿Porque?
2. Cuando los polos del sistema controlado son seleccionados como−√
2±√
2 j, encontrar el control por reali-mentacion de estadosu(t) =−kx(t) que asigna dichos polos al sistema controlado.
3. Cuando el polo deseado del observador de orden reducido eselegido como−2, calcular el observador de ordenreducido que asigna este polo deseado al error de estimacion x2 = x2− x2. Considerar que ˆx2 es el estimado dex2.
4. Combinando el controlador y observador de orden reducidoantes calculados, encontrar el correspondiente compen-sadorC(s).
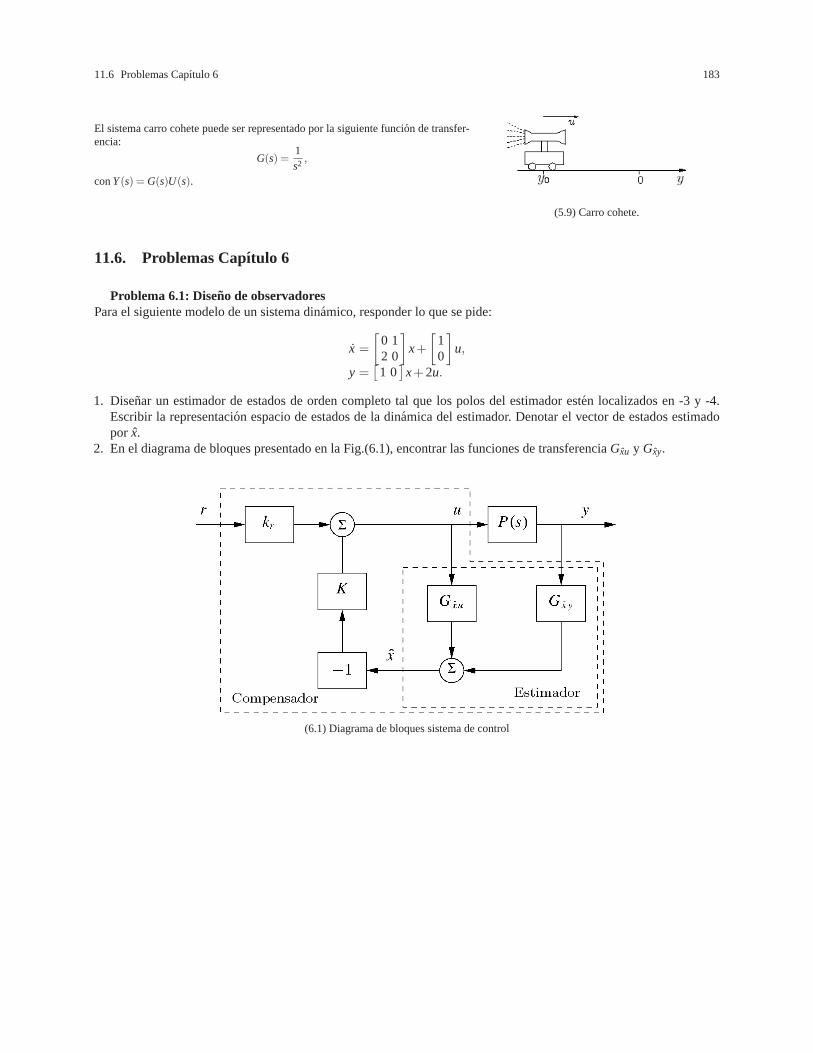
11.6 Problemas Capıtulo 6 183
El sistema carro cohete puede ser representado por la siguiente funcion de transfer-encia:
G(s) =1s2 ,
conY(s) = G(s)U(s).
(5.9) Carro cohete.
11.6. Problemas Capıtulo 6
Problema 6.1: Diseno de observadoresPara el siguiente modelo de un sistema dinamico, responder lo que se pide:
x =
[0 12 0
]
x+
[10
]
u,
y =[
1 0]x+2u.
1. Disenar un estimador de estados de orden completo tal que los polos del estimador esten localizados en -3 y -4.Escribir la representacion espacio de estados de la dinamica del estimador. Denotar el vector de estados estimadopor x.
2. En el diagrama de bloques presentado en la Fig.(6.1), encontrar las funciones de transferenciaGxu y Gxy.
(6.1) Diagrama de bloques sistema de control

184 11 Problemas propuestos y resueltos
Problema 6.2: Diseno de compensadores
Considere un mototaxi de tres ruedas, ver Fig. (6.2) (dos ruedasdelanterasy una rueda posterior). La trayectoria deseada durante el manejo se debemantener con un autopiloto (compensador).La informacion del modelo del vehıculo con control del eje frontal esta dadaen la Tabla 1. (6.2) Eje delantero, vista de planta.
Modelo Pyu(s) =y(s)u(s)
=vas+v2
Ls2
Entrada Angulo de la rueda delanterauSalida medida Trayectoria de la desviacion lateralySalida controlada Trayectoria de la desviacion lateralyParametros constantes conocidosVelocidad del vehıculov> 0
Cantidades geometricasa> 0,b> 0 y L > 0
Cuadro 11.1 Detalles de la descripcion del sistema
Seava/L = 0,5 y v2/L = 1.
1. Presente la planta en su forma canonica controlable.El modelo de la planta en su forma canonica controlable es:
x(t) =
[0 10 0
]
x(t)+
[01
]
u(t)
y =[
1 0,5]x(t)
2. Calcular la gananciaK de la ley de control de estabilizacion u(t) = −Kx(t), para un tiempo de asentamiento de larespuesta igual a 4 s. Considere una razon de amortiguamientoζ = 0,707 para los polos en lazo cerrado.Ayuda:Tiempo de asentamientots≈ 4/ζ ωo.Para el calculo deu elegimos los polos del sistema en lazo cerrado conζ = 0,707 yω =
√2:
αc(s) = s2+2ζ ωs+ω2 = s2+2s+2
Usando la formula de Ackerman:
K = q1αc(A) =[
0 1]Wc−1αc(A) =
[1 0]
([0 10 0
]2
+2
[0 10 0
]
+2
[1 00 1
])
K =[
2 2]
3. Usando los polos en lazo cerrado del caso anterior, ¿sera posible calcular la gananciaKP de la ley de controlu(t) =−KPy(t)? ¿Si, no, por que?
4. Calcular el observador de orden completo que estime los estados del sistema. Escribir dicho observador en la formaespacio de estados. Considerar que los polos de la dinamica del error de estimacion estan ubicados en−2,−2.La dinamica del estimador esta dada por:
˙x= (A−LC)x+Bu+Ly.
Sea la ganancia del estimador de estadosL =
[l1l2
]
. Siendo que los polos del estimador son−2 y −2, se debe
cumplir:

11.6 Problemas Capıtulo 6 185
|sI−A+LC|=∣∣∣∣
s+ l1 −1+0,5l1l2 s+0,5l2
∣∣∣∣= s2+(0,5l2+ l1)s+ l2 = s2+4s+4.
Luego:L =
[24
]
.
El estimador de estados resulta:˙x=
[−2 0−4 −2
]
x+
[01
]
u+
[24
]
y.
5. Presentar el compensador (controlador del item b. + observador del item d.) en su forma funcion de transferenciaKuy(s) y completar en el diagrama de bloques presentado abajo paraPyu(s) y Pzu(s).
(6.3) Diagrama de bloques sistema controlado
La dinamica del compensador esta dada por:
˙x = (A−LC−BK)x+Lyu =−Kx.
Reemplazando los valores obtenidos se tiene:
˙x =
[−2 0−6 −4
]
x+
[24
]
y
u =[
2 2]x
.
Luego:Kuy(s) =12s+8
s2+6s+8y Pyu(s) = Pzu(s).
Problema 6.3: Control por ubicacion de polos
1. El modelo para movimiento rotacionalyawde un buque de carga esta dado por:
ψ = r,α r =−r3+ r−c+βu,
dondeψ es elanguloyaw, r es la tasa de cambio deψ, u es la entrada de control;α,β son constantes conocidaspositivas y diferentes de cero yc≥ 0. El buque se esta moviendo en linea recta(ψ, r) = (ψo,0) cuando el controladordeja de funcionar,u= 0, ¿seguira el buque desplazando en lınea recta?
2. Si la dinamica linealizada del movimientoyawesta dada por:
ψ = rα r− r = βu+ rb,
rb = 0

186 11 Problemas propuestos y resueltos
donderb es un bias de sensado constante. Siψ y r son medidos, calcular el observador de orden reducido quepermita estimar el biasrb desconocido. Usarα = β = 1 y ubicar el polo del estimador ens= −5. Escribir elrepresentacion espacio de estados del estimador de orden reducido para implementacion.
3. Para la dinamica linealizada del caso anterior, calcular el controlador para control de cabeceo para cuando se asumesensado perfecto (no hay biasrb). Ubicar los polos del sistema controlado conωn = 4 rad/s yζ = 0,65.Presentar el diagrama de bloques indicando el controlador yel observador de orden reducido (incluir el detalle deentradas, salidas y dinamicas).
Problema 6.4: Diseno de observadoresSi consideramos que un brazo robotico de una union puede ser modelado como un pendulo invertido, el modelo nolineal para un brazo robotico especıfico posee la siguiente representacion espacio de estados:
[x1(t)x2(t)
]
=
[x2
−0,5x2−10senx1+0,1u
]
y(t) = x1(t)
dondey(t) es la posicion angular del brazo robotico,u(t) es el torque de control,x1 = y y x2 = y.Como parte de un trabajo de tesis Juan debe disenar un controlador para el brazo robotico. Juan calcula que el punto
de equilibrio del sistema esxe = (0,0) paraue = 0. Acto seguido,el obtiene el siguiente modelo lineal:
˙x(t) =
[0 1−10−0,5
]
x(t)+
[0
0,1
]
u(t)
y(t) =[
1 0]x(t)
donde ˜y(t) = y−ye, x= x−xe y u(t) = u−ue.
1. ¿Cometio Juan algun error en el calculo del sistema linealizado?2. Juan desea disenar un controlador por realimentacion de estados tal que el sistema en lazo cerrado tenga los polos
en -2. Para poder implementar el controlador calculado, Juan debe antes disenar un observador para el sistema linealpuesto que solo el anguloy puede ser medido. Disenar dicho observador tal que el error de observacion tienda acero lo suficientemente rapido.
Problema 6.5: Diseno de compensadoresLa dinamica describiendo la desviacion lateral de un vehıculo (manejando en el ejex) esa dada por:
[yθ
]
=
[0 10 0
][yθ
]
+
[γ1
]
δ
y =[
1 0][
yθ
]
dondey y θ son la posicion vertical normalizada y orientaciondel centro de masa del vehıculo. Ademasγ = a/b= 0,5.Responder lo que se pide:
ab
α δv
y
x
α
α
δ
δ
θ
(6.4) Control de la direccion de un vehıculo. Modelo simplificado de unabicicleta
1. Si se desea disenar un controlador para estabilizar la dinamica y seguir una referencia dadar de la posicion lateraldel vehıculo. Calcular las ganancias de la ley de controlu=−Kx+kr r para un tiempo de asentamiento igual a 6 s(normalizados) y razon de amortiguamientoζ = 0,707 para los polos en lazo cerrado.AyudaTiempo de asentamientots≈ 4/ζ ωo.
2. Para la ley de control antes usada, ¿cual es el valor inicial de la senal de actuacion? ¿Habrıa algun problema con laactuacion?
3. Disene el observador de estados con una seleccion de polos apropiada. Senale que polos eligio.4. Calcule la funcion de transferencia del sistema en lazo cerrado. ¿Por que no aparece la informacion del observador?
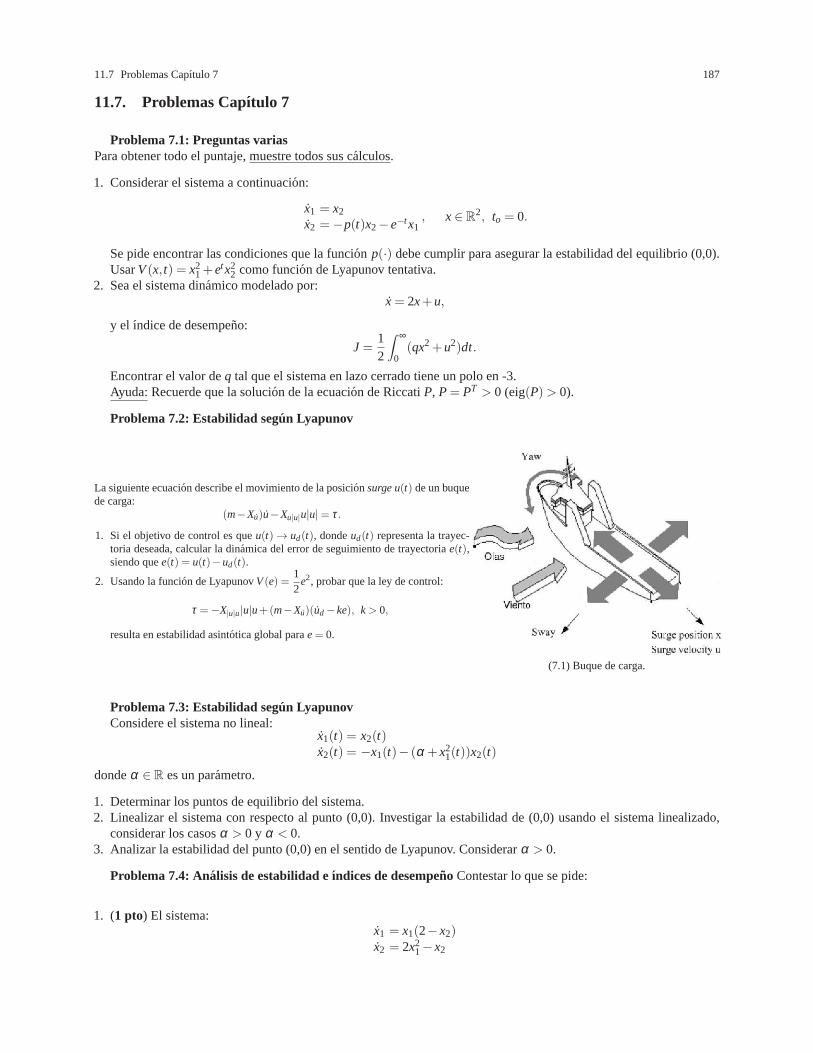
11.7 Problemas Capıtulo 7 187
11.7. Problemas Capıtulo 7
Problema 7.1: Preguntas variasPara obtener todo el puntaje, muestre todos sus calculos.
1. Considerar el sistema a continuacion:
x1 = x2
x2 =−p(t)x2−e−tx1, x∈ R
2, to = 0.
Se pide encontrar las condiciones que la funcion p(·) debe cumplir para asegurar la estabilidad del equilibrio (0,0).UsarV(x, t) = x2
1+etx22 como funcion de Lyapunov tentativa.
2. Sea el sistema dinamico modelado por:x= 2x+u,
y el ındice de desempeno:
J =12
∫ ∞
0(qx2+u2)dt.
Encontrar el valor deq tal que el sistema en lazo cerrado tiene un polo en -3.Ayuda:Recuerde que la solucion de la ecuacion de RiccatiP, P= PT > 0 (eig(P)> 0).
Problema 7.2: Estabilidad segun Lyapunov
La siguiente ecuacion describe el movimiento de la posicionsurge u(t) de un buquede carga:
(m−Xu)u−Xu|u|u|u|= τ.
1. Si el objetivo de control es queu(t)→ ud(t), dondeud(t) representa la trayec-toria deseada, calcular la dinamica del error de seguimiento de trayectoriae(t),siendo quee(t) = u(t)−ud(t).
2. Usando la funcion de LyapunovV(e) =12
e2, probar que la ley de control:
τ =−X|u|u|u|u+(m−Xu)(ud−ke), k> 0,
resulta en estabilidad asintotica global parae= 0.
(7.1) Buque de carga.
Problema 7.3: Estabilidad segun LyapunovConsidere el sistema no lineal:
x1(t) = x2(t)x2(t) = −x1(t)− (α +x2
1(t))x2(t)
dondeα ∈ R es un parametro.
1. Determinar los puntos de equilibrio del sistema.2. Linealizar el sistema con respecto al punto (0,0). Investigar la estabilidad de (0,0) usando el sistema linealizado,
considerar los casosα > 0 y α < 0.3. Analizar la estabilidad del punto (0,0) en el sentido de Lyapunov. Considerarα > 0.
Problema 7.4: Analisis de estabilidad eındices de desempeno Contestar lo que se pide:
1. (1 pto) El sistema:x1 = x1(2−x2)x2 = 2x2
1−x2

188 11 Problemas propuestos y resueltos
tiene tres puntos de equilibrio en (0,0), (1,2), (-1,2). Analizar la estabilidad de cada uno de estos puntos usando lafigura abajo.
(7.2) Diagrama de fase del sistema en el Problema 7.3
2. Considere el siguiente sistema:x1 = x2−3x1
x2 =−x32−2x1
Probar que el punto de equilibrio (0,0) es asintoticamente estable. ¿Es el sistema globalmente o localmenteasintoticamente estable?Ayuda: Use la siguiente funcion de Lyapunov candidata,V(x) = 2x2
1+x22.
3. Problema del mınimo esfuerzo de control. Sea el sistema ˙x = Ax+Bu, determinar elındice de desempeno quecorresponde al problema de transferir un sistema de un estado inicial arbitrariox(to) = xo hacia un estado finalx(t f ) = xf ∈S con el mınimo esfuerzo de control.
4. Problema del tiempo mınimo. Sea el sistema ˙x= Ax+Bu, determinar elındice de desempeno que corresponde alproblema de transferir un sistema de un estado inicial arbitrario x(to) = xo hacia un estado finalx(t f ) = xf ∈S enun tiempo mınimo.
Problema 7.5: Responda verdadero/falsoDemuestre la veracidad o falsedad de los siguientes enunciados. Para obtener todo el puntaje, muestre todos sus calculos.
1. Las Figs. (7.3a) y (7.3b) representan estados de equilibrio asintoticamente estables. ( )
!
!
0 t
x(t)
(a)
!
!
0 t
x(t)
(b)
(7.3) Estabilidad
2. La funcionV(x, t) = x21+2x2
2(1+e−t), to = 0, x∈ R2, es definida positiva. ( )
3. Para el sistema a continuacion, el estado de equilibrioxe es estable, ( )
x1 = x2
x2 =−x1, x∈ R
2, xe = 0, to = 0.
Nota: UseV(x) = ‖x‖2 como funcion de Lyapunov tentativa para probar la estabilidad.4. El siguiente problema de controloptimo: ( )

11.7 Problemas Capıtulo 7 189
mınu
∫ t f
touTudt
tal quex= Ax+Bux(to) = xo,x(t f ) = xf ,
consiste en determinar una ley de control admisibleu∗ que, en el menor tiempo posible, lleve la trajectoria delsistema desde el estado inicialx(to) = xo a un estado finalxf especificado.
Problema 7.5: Preguntas variasPara obtener todo el puntaje, muestre todos sus calculos.
1. Las figuras abajo representan los diagramas de plano de fase de dos sistemas, senalar cuantos y cuales son los puntosde equilibrio. ¿Que puede decir de la estabilidad de dichos puntos de equilibrio?
1 0 1 1.5
1
0.5
0
0.5
1
1.5
x1
x2
(a)(7.4) Sistema oscilador electronico
−2
−1
0
1
2
x1
x2
−2π −π 0 π 2π
(c)(7.5) Sistema pendulo invertido
2. El sistema a continuacion representa un pendulo invertido con longitud variable:
x1 = x2
x2 =−x2− (2+sent)x1, x∈ R
2, to = 0.
Analizar la estabilidad del punto de equilibrioxe = 0. UsarV(x, t) = x21 +
x22
2+sentcomo funcion de Lyapunov
tentativa.
Problema 7.6: Estabilidad segun Lyapunov
1. Representar el movimiento rotacional (dinamica/cinematica) del satelite en la forma espacio de estados. Considerarque el lazo de control ha sido cerrado con:
τ =−αω +do×bo, α ∈ R,α > 0.
2. Calcular el (los) puntos de equilibrio del sistema en lazocerrado.3. Demostrar que la ley de control antes descrita alineabo con−do. Usar la funcion de Lyapunov candidata:
V(ω,do) =12
ωT Iω +12(do+bo)
T(do+bo).
Formulasutiles:
a·b = aT b,a· (b×c) = b · (c×a) = c· (a×b)

190 11 Problemas propuestos y resueltos
Un sateliteB (cuerpo rıgido) con un sistema de referencia solidario al cuerpo - origen en el centrode masa y alineado con respecto a los principales ejes de inercia- es mostrado en la Fig. 1. Seabo ∈ R
3 un vector unitario representando la direccion de una antena en el satelite y do ∈ R3 un
vector unitario fijo (sistema de referencia inercial) representando la direccion de la antena en laestacion terrena.La ecuacion del movimiento de Euler resulta en:
I ω +ω× Iω = τ,
dondeω ∈ R3 es el vector velocidad angular del satelite con respecto a los ejes solidarios al
cuerpo,I = diag(I1, I2, I3) y τ es el torque de control.En el sistema de referencia solidario al cuerpo,do no esta fijo, esta rotando con velocidad angular−ω, entonces:
do =−ω×do.
(7.6) Satelite y estacion terrena
11.8. Problemas Capıtulo 8
Problema 8.1: Control optimo con valor final y tiempo final fijos
u(t) x(t)
R 100 k!
C 10 F
i(t)
(8.1) Circuito cargador de capacitor
El voltaje de entradau(t) que carga al capacitor en la Fig. 2, partiendo dex(0) = 2V en t = 0 hastax(10) = 12V en t = 10, debe ser calculado parauna energıa disipada por el resistor mınima. No hay restricciones en la ley decontrolu(t). Notar que, de la ley de voltajes de Kirchhoff:
Ri(t)+x(t) = u(t),
dondei(t) =Cdx(t)
dt, y la energıa disipada es:
J =12
∫ 10
0Ri2(t)dt.
1. Definir la funcion Hamiltoniano y correspondientes ecuaciones de estado y coestado, condicion estacionaria y condi-ciones de frontera.
2. Resolver las ecuaciones anteriores y calcular el voltajede entradau(t) optimo.3. Calcular el valor mımimo deJ.
Problema 8.2: LQR con horizonte infinitoDada la matriz Hamiltoniana correspondiente a un sistema dinamico y suındice de desempeno asociado. La matrizHamiltoniana es:
H =
[2 −5−1 −2
]
La funcion del Matlab[V,D]=eig(H) resulto en lo siguiente:
V =
[0,9806 0,7071−0,1961 0,7071
]
, D =
[3 00 −3
]
Se pide:
1. Escribir la ecuacion del sistema en lazo cerrado gobernado por la ley de controlu=−kx.2. Encontrar la solucion de la ecuacion de Riccati correspondiente al controladoroptimo.
Problema 8.3: Balanceando una bola sobre una vigaLa Fig. (8.2) muestra una bola que rueda a lo largo de una vıa acondicionada en la viga. La bola debe ser llevada al

11.8 Problemas Capıtulo 8 191
punto medio de la viga (el origen) mediante manipulacion del angulo de la viga a traves de un motor electrico. Ladistancia entre la posicion de la bola y el origen se denota comoy y satisface la siguiente ecuacion diferencial:
y= bsin(θ)≈ bθ ,
dondeb es una constante que depende de varios parametros del sistema. Se asume que el valor normalizado debes 1. Para poder usar controloptimo, se necesita tener una aproximacion de la dinamica. Ası, se define la siguienterealizacion espacio de estados del sistema:
z= Az+Buy =
[1 0]z.
El proposito del problema de optimizacion es llevar la bola al origen sin requerir demasiada energia. Un criterionatural de desempeno es el siguiente problema cuadratico:
mınu
∫ ∞
0(qy2+ ru2)dt
tal quez= Az+Bu,z(0) = [0,5 1]T
dondeq y r son parametros positivos.
θ
y
(8.2) La bola rodando en la vıa de la viga y podrıa caer en cualquiera de los puntos extremos
Obtener lo que se pide:
1. Sea:
P=
[p11 p12
p21 p22
]
,
siendop12 = p21 y P> 0 (definida positiva). Escribir la ecuacion de Riccati como un sistema de cuatro ecuacionesexplıcitas en terminos de los elementos deP y de las constantesq y r. Resolver para los elementos deP.
2. Encontrar las ganancias del controladoroptimo asumiendo que todos los estados son conocidos por la reali-mentacion. Asumir quer = 1 y q= 5.
3. Encontrar la frecuencia natural y la razon de amortiguamiento del sistema en lazo cerrado.4. Siendo que la viga tiene longitud finita, se hace necesario introducir restricciones en el problemade optimizacion
para asegurar que la bola no se caiga de la viga. Adicionalmente, a menudo debemos disenar el controlador asum-iendo que existen limitaciones en la magnitud dela senal de control. En base a lo expuesto, ¿como se formularıa elproblema de controloptimo resultante?
Problema 8.4: LQR con horizonte finitoCalcular la ley de control por realimentacion de estadosu tal que minimice
J =
int10(x
2+u2)dt
sujeto ax =−x+u,x(0) = 2
Asumir J∗ = p(t)x2(t).Ayuda: Los puntos a continuacion deben ser completados analıticamente.
En general, la ecuacion Hamilton-Jacobi-Bellman esta dada por:

192 11 Problemas propuestos y resueltos
0=∂J∗
∂ t+minu(t)∈R
L(x,u)+
(∂J∗
∂x
)T
f (x,u)︸ ︷︷ ︸
H
Dado que no hay restricciones en la senal de controlu, la forma del controloptimo se puede determinar aplicandolas condiciones (necesaria de primer orden y suficiente de segundo orden) de optimizacion a la funcion H. Aquı sedebe obteneru∗ en funcion dep(t) y otras variables.El resultado del punto anterior debe ser reemplazado en la ecuacion HJB del primer punto. La ecuacion resultantevendrıa a ser la ecuacion de Riccati diferencial. ¿Cual es la condicion inicial de esta ecuacion?Redefina la ecuacion diferencial de Riccati en funcion de su matriz Hamiltoniana (misma matriz que en el caso decontroloptimo con horizonte infinito). No se olvide de detallar las condiciones iniciales.
Problema 8.5: LQR con horizonte infinitoDada la matriz Hamiltoniana correspondiente a un sistema dinamico y suındice de desempeno asociado. Sea la matrizHamiltoniana:
H =
[2 −5−1 −2
]
La funcion del Matlab[V,D]=eig(H) resulto en lo siguiente:
V =
[0,9806 0,7071−0,1961 0,7071
]
, D =
[3 00 −3
]
Se pide:
1. Escribir la ecuacion del sistema en lazo cerrado gobernado por la ley de controlu=−kx.2. Encontrar la solucion de la ecuacion de Riccati correspondiente al controladoroptimo.
Problema 8.6: Control de posicion motor DCUn sistema de control de posicion de un motor DC para el control de una valvula electronica es descrito por la ecuaciondiferencial: [
θω
]
=
[0 10 −α
][θω
]
+
[0β
]
Va. ,
dondeθ es la posicion angular,ω es la velocidad angular,α es el coeficiente de amortiguamiento viscoso,β es elconstante de velocidad del motor DC yVa es el voltaje de actuacion.
Considerar el problema de regular el motor en torno a su estado cero donde la variable controlada es la posicion, esdecir:
y=[
1 0][
θω
]
,
1. Encontrar el control por realimentacion de estadosoptimo que minimice elındice de desempeno:
J = l ımt→∞
∫ t
0(y2+ρV2
a )dt
Usar los valores numericosα = 7,14 rad/s,β = 238,3 rad/(Vs2) y ρ=1.2. ¿Cual es el tiempo de subida de la respuesta del sistema en lazo cerrado? ¿Como se podrıa disminuir el tiempo de
subida?
Nota:ts =2,230ζ 2−0,078ζ +1,12
ωo
Problema 8.7: Control LQRConsidere la representacion espacio de estados de una planta de primer orden inestable:
x(t) = ax(t)−au(t), a∈ R,a> 0,
y el nuevo ındice de desempeno:
11.8 Problemas Capıtulo 8 193
J =∫ ∞
0e2bt[x2(t)+ρu2(t)]dt, ρ ,b∈ R,ρ > 0,b≥ 0.
1. Demostrar que, con un cambio de variablesebtx(t)→ x(t) y ebtu(t)→ u(t), la unica modificacion requerida paracalcular el control LQR con el nuevoındice de desempeno es usarA+bI en la ecuacion de Riccati algebraica envez deA.
2. Para el sistema con variable de estado ˜x(t) y senal de control ˜u(t), determinar la gananciaK del control LQR enfuncion deρ ,a,b.
3. Para el sistema con variable de estadox y senal de controlu, mostrar la posicion de los polos en lazo cerrado en elplano complejo con 0< ρ < ∞.
4. Usar el resultado anterior para explicar cual es el efecto deb en el diseno del control.

194 11 Problemas propuestos y resueltos
11.9. Problemas Capıtulo 9
Problema 9.1: Filtro de KalmanConsidere un cohete en el espacio, el cual se puede modelar como un integrador doble que se mueve en una direccion.La aceleracion es debido al ruido de proceso. Con las variables de estadox1 = z y x2 = z, la representacion espacio deestados del sistema es:
x =
[0 10 0
]
x+
[01
]
w
y =[
1 0]x+v
, x∈ R2.
Por el momento, asumir que la posicionzes medida con algun errorv.Considerar quew y v son procesos de ruido blanco con media cero y densidades espectrales (covarianzas) como
sigue:W = γ4, V = 1.
1. Determinar el filtro de Kalman. Escribir el observador en su forma espacio de estados.2. Suponer que un segundo sensor es usado, tal que la velocidad z tambien es medida. La ecuacion de salida es luego
cambiada a:y= x+v,
donde ahorav es un vector de dimension dos (ruido blanco de media cero) con matriz de covarianza:
V =
[1 00 γ2
]
.
Demuestre que la matriz de covarianza del error de estimacion (solucion de la ecuacion de Riccati) es:
P= ExT(t)x(t)= 12
[√3γ γ2
γ2√
3γ3
]
.
¿Cual es la ganancia del filtro de Kalman?
Problema 9.2: Control LQGConsidere el sistema inestable de segundo orden:
x1 = x2
x2 = x2+u+w,
con medidas contınuas:y= x1+x2+v,
dondew y v son procesos de ruido blanco con densidades espectrales (covarianzas)W y V, respectivamente.
1. (2 ptos) Sea elındice de desempeno:
J =∫ ∞
0(x2
1+x22+Ru2)dt.
Encontrar los polos del sistema controlado. Graficar en el plano complejo como varıan los polos en funcion deR.2. Mostrar que paraR= 1 y W =V = 1, las ganancias del control LQR y del filtro de Kalman resultan en:
K =[
1 3], L =
[12
]
,
siendo que los polos del sistema controlado estan ambos ens=−1.3. Encontrar la funcion de transferencia del compensador LQG resultanteG(s).4. Para la dinamica del compensadorG(s), bosquejar en el plano complejo como varıan los polos del sistema contro-
lado al ir variando la ganancia de la plantaα (tal queαPy(s)→ Py(s), paraα = 1).5. Para el controlador LQR,u= −Kx, bosquejar en el plano complejo como varıan los polos del sistema controlado
al ir variando la ganancia de la plantaα (tal queαPx(s)→ Px(s), paraα = 1). Asumir en este caso que se conocentodos los estados.

11.9 Problemas Capıtulo 9 195
Problema 9.3: Control LQGConsidere el sistema de primer orden:
x = αx+u+wy = x+v
,
dondew y v son procesos de ruido blanco con varianzasσw y σv, respectivamente, y elındice de desempeno es:
J = E12
∫ ∞
0(qx2+u2)dt,
1. Calcular el control LQR correspondiente. Notar que la ganancia de controlK sera funcion deq. Presentar la dinamicadel sistema controlado.
2. Si σw/σv = 1, calcular la ganancia del filtro de Kalman. Presentar el filtro de Kalman en su forma de espacio deestados.
3. Encontrar el rango deq que permita que el estimador posea una dinamica rapida en comparacion a la dinamica delsistema controlado.
Problema 9.4: Preguntas variadasResponda segun corresponda.
1. Una forma comun delındice de desempeno cuadratico es:
J =12
eTf Qf ef +
12
∫ t f
toy(t)TQyy(t)+u(t)TRyu(t)dt
dondey(t) =Cx(t)+Du(t). Mostrar queJ puede ser reescrito como:
J =12
eTf Qf ef +
12
∫ t f
tox(t)TQx(t)+x(t)TNu(t)+u(t)TRu(t)dt,
donde:Q=CTQyC, N =CTQyD, R= Ry+DTQyD.2. Considere el siguiente sistema para el calculo del observadoroptimo:
x =
[2 −41 −3
]
x+
[1−3
]
u+w,
y =[
1 3]x+v
dondeW =
[3 22 7
]
y V = 17 son las matrices de covarianza del ruido blanco Gausianow y v, respectivamente.
a) Escribir la ecuacion de Riccati correspondiente.b) Resolver la ecuacion de Ricati algebraica.c) Escribir la representacion espacio de estados del Filtro de Kalman (FK).
Problema 9.5: Control LQGConsidere el problema LQG con la siguiente dinamica:
x =
[1 10 1
]
x+
[01
]
u+
[11
]
w,
y =[
1 0]x+v
dondex =[
x1 x2]T
es el vector de estados,u es la entrada de control,y es la salida medida yw y v son los ruidosblancos Gausianos independientes con intensidadesσ ≥ 0 y 1 respectivamente.
El ındice de desempeno asociado esta dado por:
J = E
l ımT→∞
1T
∫ T
0(ρ(x1+x2)
2+u2)dt
donde E(·) es el valor esperado yρ es un parametro real no negativo.

196 11 Problemas propuestos y resueltos
Obtener lo que se pide:
1. Encontrar la ganancia del controladoroptimo (LQR) asumiendo que todos los estados son conocidos por la reali-mentacion.
2. Encontrar la ganancia del observadoroptimo (FK).3. Describir el compensadoroptimo (LQR+FK) usando una representacion espacio de estados.4. Describir el sistema con control LQG usando una representacion espacio de estados.5. Completar en el diagrama de bloques de la figura abajo usando las correspondientes funciones de transferencia.
s
plant
k
κ
w v
y
u
(9.1) Sistema en lazo cerrado con control LQG
Problema 9.6: Filtro de KalmanUn ingeniero intenta usar la teorıa del filtro de Kalman como una metodologıa para filtrar senales de medida ruidosas.Considere el diagrama de bloques mostrado en la figura dondey(t) es la senal util, v(t) el ruido de medida yz(t) lasmedidas ruidosas. El filtro a ser disenado es denotado porL(s), cuya salida ˆy(t) debe ser un buen estimado de la entradautil y(t).
(9.2) Filtrado de ruido
Se desea queL(s) sea un filtro pasa-baja con las siguientes caracterısticas:
L(0) = 1L(s) decayendo como 1/s para grandes valores des
El ingeniero comienza modelando la senaly(t) como una senal filtrada por el sistema de primer ordenG(s):
G(s) =b
s+a,
la senal filtrada es el ruido blancow(t) con covarianzaW. El ruido de medidav(t) tambien se asume como ruido blanco,y con covarianzaV. La forma espacio de estados resulta:
x= −ax+βwz= (b/β )x+v
para valores del parametroβ 6= 0 .
1. Considerando el observador de la forma:
˙x= −ax+ l [z− (b/β )x] ,
derivar la funcion de transferencia correspondiente al filtro.

11.9 Problemas Capıtulo 9 197
2. Derivar el filtro de Kalman ¿Cual es la influencia del parametroβ en el filtroL(s)?3. ¿Que restricciones se necesitan en los parametros del modeloG(s) para hacer que se satisfagan las propiedades del
filtro L(s) antes especificadas?4. Asumiendo que el modelo de la senaly(t) es tomado como un sistema de segundo orden:
G(s) =b
s(s+a), (a> 0,b> 0)
¿Se puede satisfacer la restriccionL(0) = 1?
Problema 9.7: Control LQGConsidere el problema del LQG con la siguiente dinamica:
x= u+wy= x+v
dondex es la variable de estado,u es la entrada de control,y es la salida medida yw y v son ruidos blancos Gaussianosindependientes con covarianzasβ 2r y r respectivamente.
El control LQG usa el siguienteındice de desempeno:
J = E l ımT→∞
1T
∫ T
0(α2x2+u2)dt,
dondeE· es el valor esperado yα, β son parametros reales no negativos.
1. Demuestre que el compensadoroptimo (LQR + filtro de Kalman) esta dado por:
u=−k(s)y,
donde:
k(s) =αβ
s+α +β2. Determine la representacion espacio de estados del sistema en lazo cerrado, conw y v como entradas, y las variables
de estadosx y x. Demuestre paso a paso sus calculos ¿Cuales son los autovalores del sistema en lazo cerrado?3. En el diagrama de bloques mostrado, ¿que valores podrıa alcanzar el escalarθ sin desestabilizar el sistema en lazo
cerrado?
(9.3) Sistema en lazo cerrado LQG con ganancia variable

Apendice AEcuaciones de Euler Lagrange
Las ecuaciones de Lagrange son una de las tecnicas mas comunes para derivar las ecuaciones de movimiento sesistemas con multiples grados de libertad (GDL).
ddt
∂L
∂ qi− ∂L
∂qi= Qi , i = 1,2, ..n.
SiendoL = T−V, conT siendo la energıa cinetica yV la energıa potencial,qi son las coordenadas generalizadas yQi son las fuerzas generalizada. Ciertas restricciones se aplican a la eleccion de estas cantidades generalizadas:
Las coordenadas generalizadas deben ser linealmente independientes.Las fuerzas generalizadasQi deben realizar el mismo trabajo que las fuerzas no conservativas considerando undesplazamiento virtualδqi , ası:
δW =n
∑i=1
Qiδqi .
En la figura abajo, los requerimientos antes mencionados sonsatisfechos cuando:q1 = z1, q2 = z2, Q1 = F1 yQ2 = F2.
Figura A.1 Sistema masa-resorte con dos GDL
Las energıas cineticaT y potencialV respectivas seran:
T =12
m1z21+
12
m2z22
199

200 A Ecuaciones de Euler Lagrange
V =12
k1z21+
12
k2(z2−z1)2.
Y el Lagrangiano sera:
L =12
m1z21+
12
m2z22−
12
k1z21−
12
k2(z2−z1)2
Luego, realizando las correspondientes sustituciones en las ecuaciones de Lagrange:
ddt(
∂L
∂ z1) =
ddt(m1z1) = m1z1
∂L
∂z1= k1z1−k2(z2−z1) = (k1+k2)z1−k2z2
ddt(
∂L
∂ z1)− ∂L
∂z1= F1
m1z1+(k1+k2)z1−k2z2 = F1
ddt(
∂L
∂ z2) = d
dt (m2z2) = m2z2
∂L
∂z2= k2(z2−z1) =−k2z1+k2z2
ddt(
∂L
∂ z2)− ∂L
∂z2= F2
m1z2−k2z1+k2z2 = F2
En forma matricial:[
m1 00 m2
]z1
z2
+
[k1+k2 −k2
−k2 k2
]z1
z2
=
F1
F2
A.1. Problema
El deslizador (1) de masam1 se puede mover horizontalmente y esta en contacto con dos resortes (3) de rigidezk.La esfera (2) de masam2 y radior forma un cuerpo rıgido con la masa despreciable (4). Todo el movimiento esta en elplano vertical. El momento de la esfera con respecto a un eje que pasa por su centro de gravedad esI = 2
5m2r2.
Figura A.2 Sistema deslizador-pendulo con dos GDL
En el instantet = 0, el sistema es posicionado tal que:Hallar las ecuaciones diferenciales de movimiento.
A.2. Solucion
El sistema tiene dos grados de libertad, por tanto dos coordenadas generalizadasx y ϕ. La energıa cineticaT sera:

A.2 Solucion 201
T = T1+T2 =12
m1x2+12
m2v2G+
12
I ϕ2
La velocidad y la posicion absoluta del centro de masa de la esfera seran:
rG= (x+Rsenϕ)i+(−Rcosϕ)j
vG= rG= (x+Rϕ cosϕ)i +(Rϕ senϕ)j
El cuadrado de la velocidad sera:
v2G = (x+Rϕ cosϕ)2+(Rϕ senϕ)2 = x2+2xRϕ cosϕ +R2ϕ2
La energıa cinetica total sera:
T =12
m1x2+12
m2(x2+2xRϕ cosϕ +R2ϕ2)+
12
I ϕ2
= 12(m1+m2)x2+m2xRϕ cosϕ + 1
2(m2R2+ I)ϕ2
La energıa potencial total sera debido a la energıa almacenada en los resortes y a la energıa gravitacional:
V = 212
kx2−m2gRcosϕ
Luego el Lagrangiano resulta:
L =12(m1+m2)x
2+m2xRϕ cosϕ +12(m2R2+ I)ϕ2−kx2+m2gRcosϕ
Aplicando las ecuaciones de Lagrange:ddt(
∂L
∂ x)− ∂L
∂x= 0
ddt(
∂L
∂ ϕ)− ∂L
∂ϕ= 0
donde:ddt(
∂L
∂ x) =
ddt((m1+m2)x+m2Rϕ cosϕ)
= (m1+m2)x+m2Rϕ cosϕ−m2Rϕ2senϕ
∂L
∂x= 2kx
Figura A.3 m1 =2kg,m2 =1kg,R= 0,1m, r = 0,05m,k=1000N/m,a= 0,01m

202 A Ecuaciones de Euler Lagrange
El sistema tiene 2 grados de libertad, por tanto 2 coordenadas generalizadas x y φ. LFigura A.4 Sistema deslizador-pendulo con dos GDL
ddt(
∂L
∂ ϕ) =
ddt(m2Rxcosϕ +(m2R2+ I)ϕ)
= (m2R2+ I)ϕ +m2Rxcosϕ−m2Rxϕ senϕ
∂L
∂ϕ=−m2Rxϕ senϕ−m2gRsenϕ
Usando las ecuaciones de Lagrange:
(m1+m2)x+m2Rϕ cosϕ−m2Rϕ2senϕ +2kx= 0(m2R2+ I)ϕ +m2Rxcosϕ +m2gRsenϕ = 0

Apendice BOptimizacion
B.1. Optimizacion sin restricciones
Un ındice de desempeno escalarL(u) esta dado en funcion de un vector decontrol u∈ Rm. Queremos obtener el
valor deu que resulte en el mınimo valor deL(u).Para resolver el problema deoptimizacion, escribimos la expansion en serie de Taylor de un incremento enL, ası:
dL= LTu du+
12
duTLuudu+O(3), (B.1)
dondeO(3) representa los terminos de orden tres. El gradiente deL con respecto au es el vector columna:
Lu =∂L∂u
, (B.2)
y la matriz Hessiana es:
Luu =∂ 2L∂u2 , (B.3)
y Luu es denominada la matriz curvatura.Un punto estacionario o crıtico ocurre cuando un incrementodL es cero en su primera orden para todos los incre-
mentosdu. Luego:Lu = 0, (B.4)
para un punto crıtico.Suponiendo que estamos en el punto crıtico, tal queLu = 0 en (B.1), para que el punto crıtico sea un mınimo local,
se requiere que:
dL=12
duTLuudu+O(3), (B.5)
sea positivo para todos los incrementosdu. Esto se garantiza si la matriz de curvaturaLuu es definida positiva:
Luu > 0. (B.6)
Si Luu es definida negativa, el punto crıtico es un maximo local.
B.1.1. Ejemplo: Superficies cuadraticas
Seau∈ R2 y:
L(u) =12
uT[
q11 q12
q12 q22
]
+[
s1 s2]u=
12
uTQu+STu
El punto crıtico esta dado por:
203

204 B Optimizacion
Lu = Qu+S.
Luego:u∗ =−Q−1S,
dondeu∗ denota el controloptimo.El tipo de punto crıtico se obtiene examinando la matriz Hessiana:
Luu = Q.
El puntou∗ es mınimo siLuu > 0, oq11 > 0,q11q22−q212 > 0. Es un maximo siLuu < 0, oq11 < 0,q11q22−q2
12 < 0.Sustitiuendou∗ se puede encontrar el valor extremo delındice de desempeno:
L∗ = L(u∗) =12
STQ−1QQ−1S−STQ−1S=−12
STQS.
Sea:
L(u) =12
uT[
1 11 2
]
+[
0 1]u.
Luego:
u∗ =−[
2 −11 1
][01
]
=
[1−1
]
,
es un mınimo, dado queLuu > 0. El mınimo valor deL esL∗ =−12.
Los contornos deL(u) son dibujados en la Fig. A.1, dondeu=
[u1
u2
]T
. Las flechas representan el gradiente:
Lu = Qu+S=
[u1+u2
u1+2u2+1
]
Notese que el gradiente es siempre perpendicular a los contornos y apuntando en la direccion de incremento deL(u).
Figura B.1 Contorno y vector gradiente

B.2 Optimizacion con restricciones de igualdad 205
B.2. Optimizacion con restricciones de igualdad
Sea elındice de desempeno escalar dado porL(x,u), una funcion del vector de controlu∈Rm y del vector de estadosx∈ R
n. El problema consiste en seleccionaru tal que minimice aL(x,u) y simultaneamente satisfaga la ecuacion derestriccion:
f (x,u) = 0. (B.7)
EL vectorx es determinado para unu dado de la relacion (B.7), tal quef es un conjunto de ecuaciones escalares,f ∈ R
n.Para encontrar las condiciones necesarias y suficiente paraun mınimo local que tambien satisfagaf (x,u) = 0,
procederemos de forma similar a la seccion anterior.
B.2.1. Multiplicadores de Lagrange y el Hamiltoniano
En un punto estacionario,dL es igual a cero al primer orden para todos los incrementosducuandod f es cero. Estorequiere que:
dL= LTu du+LT
x dx= 0, (B.8)
y,d f = fudu+ fxdx= 0. (B.9)
Dado que (B.7) determinax para unu dado, el incrementodx puede ser determinado de (B.9) para un incrementodadodu. Luego la matriz Jacobianafx es no singular y:
dx=− f−1x fudu. (B.10)
Y sustituyeno (B.10) en (B.8), resulta:dL= (LT
u −LTx f−1
x fu)du. (B.11)
La derivada deL con respecto au manteniendof constante esta entonces dada por:
∂L∂u
∣∣∣∣d f=0
= (LTu −LT
x f−1x fu)
T = Lu− f Tu f−T
x Lx, (B.12)
dondef−Tx significa( f−1
x )T . Notar que:∂L∂u
∣∣∣∣dx=0
= Lu. (B.13)
Para conseguirdL igual a cero al primer orden para incrementos arbitrariosducuandod f = 0, se debe tener:
Lu− f Tu f−T
x Lx = 0. (B.14)
Esta es una condicion necesaria para un mınimo.Antes de derivar una condicion suficiente, escribir (B.8) y (B.9) como:
[dLd f
]
=
[LT
x LTu
fx fu
][dxdu
]
(B.15)
Este conjunto de ecuaciones lineales define un punto estacionario, y debe tener una solucion[
dxT duT]T
. LA unicaforma de que esto pueda ocurrir es si la matriz de coeficientesde dimension (n+1)× (n+m) tiene rango menor quen+1. Esto es sus filas deben ser linealmente dependientes tal que exista un vectorλ ∈ R
n tal que:
[1 λ T
][
LTx LT
ufx fu
]
= 0 (B.16)
Entonces:

206 B Optimizacion
LTx +λ T fx = 0 (B.17)
LTu +λ T fu = 0 (B.18)
Resolviendo esteultimo sistema de ecuaciones se tiene:
λ T =−LTx f−1
x . (B.19)
Y sustituyendo (B.19) en (B.18) de nuevo resulta en la condicion (B.14) para puntos estacionarios.Definiendo el Hamiltoniano como:
H = L+λ T f , (B.20)
dondeλ es denominado multiplicador de Lagrange.En un punto estacionario,dH = dL es igual a cero al primer orden para los incrementos de primerorden deduy dλ
cuandod f es cero.dH = HT
u du+HTx dx+Hλ dλ = 0, (B.21)
Incrementosdx no contribuyen adH:∂H∂x
= Lx+ f Tx λ = 0, (B.22)
que es igual a (B.19). Incrementosdλ tampoco contribuyen adH:
∂H∂λ
= f = 0. (B.23)
Si (B.22) y (B.23) se cumplen, entonces:dL= dH = HT
u du, (B.24)
dado queH = L en esta situacion. ENtonces, para alcanzar un punto estacionario debemos imponer la siguiente condi-cion estacionaria:
Hu = 0. (B.25)
Luego las condiciones necesarias para un punto mınimo deL(x,u) que satisface la restriccion f (x,u) = 0 son:
∂H∂λ
= f = 0, (B.26)
∂H∂x
= Lx+ f Tx λ = 0, (B.27)
∂H∂u
= Lu+ f Tu λ = 0, (B.28)
conH(x,u,λ ) definida por (B.20).Mediante la introduccion de multiplicadores de Lagrange, ha sido posible reemplazar el problema de minimizar
L(x,u) sujeto a la restriccion f(x,u) = 0 con el problema de minimizar el Hamiltoniano H(x,u,λ ) sin restricciones.
B.2.2. Ejemplo: Superficie cuadratica con restriccion lineal
Suponer que elındice de desempeno esta dado como en el ejemplo anterior:
L(x,u) =12
[x u][
1 11 2
][xu
]
+[
0 1][
xu
]
.
Sea la restriccion:f (x,u) = x−3= 0.
El Hamiltoniano es:
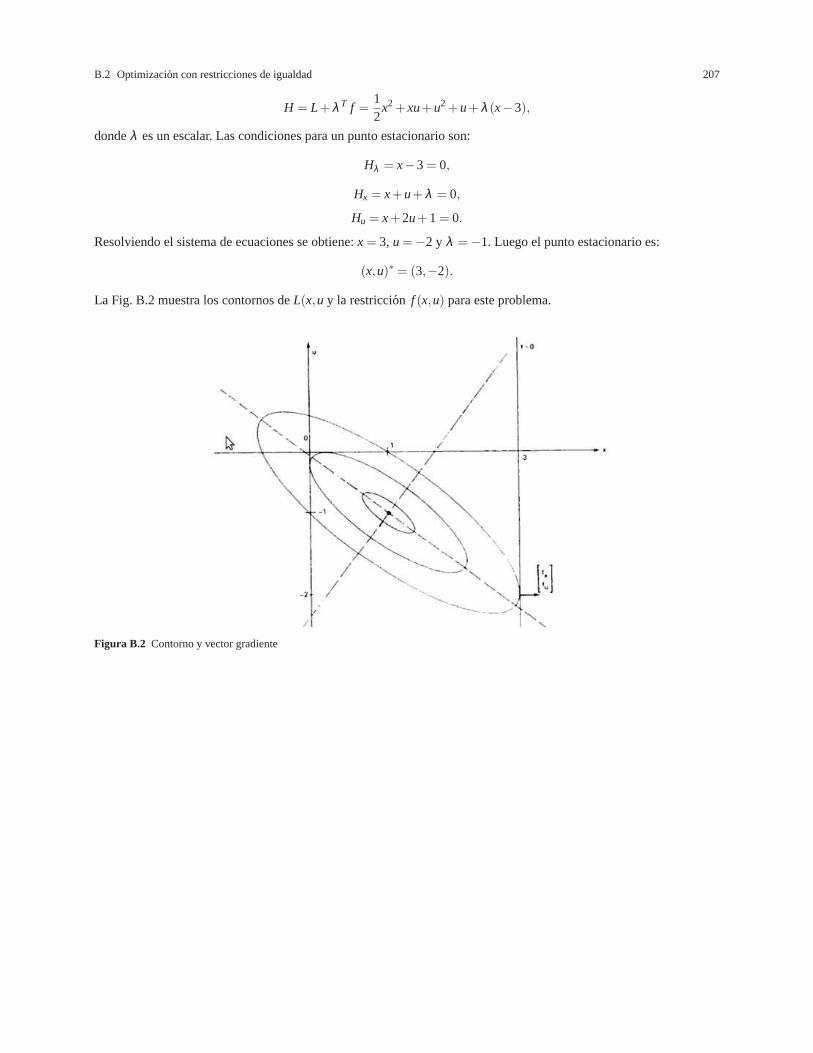
B.2 Optimizacion con restricciones de igualdad 207
H = L+λ T f =12
x2+xu+u2+u+λ (x−3),
dondeλ es un escalar. Las condiciones para un punto estacionario son:
Hλ = x−3= 0,
Hx = x+u+λ = 0,
Hu = x+2u+1= 0.
Resolviendo el sistema de ecuaciones se obtiene:x= 3, u=−2 y λ =−1. Luego el punto estacionario es:
(x,u)∗ = (3,−2).
La Fig. B.2 muestra los contornos deL(x,u y la restriccion f (x,u) para este problema.
Figura B.2 Contorno y vector gradiente


Apendice CCalculo Variacional
Calculo variacional es una rama de la matematica que es bastanteutil en la solucion de problemas de optimizacion.Un problema historico resuelto usando calculo variacional es el problema del la curva braquistocrona. El problemafue propuesto en 1696 por Johann Bernoulli. Bajo la influencia de la gravedad una bola se desplaza a lo largo de unacuerda (sin friccion) con extremos fijosA y B. El problema consiste en encontrar la forma de la cuerda que haga quela bola se mueva deA haciaB en el menor tiempo posible. La solucion es un cicloide y se le atribuye a Johann y JacobBernoulli, Newton y L’Hospital. La conexion con el problema de controloptimo es aparente, encontrar la funcion decontrol que minimice la medida de desempeno.
En controloptimo el objetivo es determinar una funcion que minimice unfuncionalespecıfico - el ındice de de-sempeno. Un problema analogo en calculo es determinar un punto que lleve a un valor mınimo de una funcion. Enesta seccion introduciremos conceptos concernientes a funcionales apelando a resultados conocidos de la teoria defunciones.
C.1. Conceptos
Funcion: Una funcion es una regla de correspondencia que asigna a cada elementode un cierto conjuntoD ununico elemento en el conjuntoR. D es denominado dominio yR es denominado rango.
Funcional Un funcionalJ es una regla de correspondencia que asigna a cada funcion x en una cierta claseΩ ununico valor real.Ω es denominado dominio del funcional, y el conjunto de numeros reales asociados con las funcionesenΩ es denominado rango del funcional.
Notar que el dominio de un funcional es una clase de funciones; intuitivamente, podriamos decir que un funcionales una “funcion de una funcion”.
Incremento de un funcion Si q y q+∆q son elementos para los cuales la funcion f es definida, luego el incrementode f , denotado por∆ f , es:
∆ f = f (q+∆q)− f (q). (C.1)
Notar que∆ f depende de tantoq como∆q, en general, para ser mas explıcitos,∆ f (q,∆q).EjemploConsidere la funcion: f (q) = q2
1 = 2q1q2,∀q1,q2 ∈ R. El incremento def es:
∆ f = f (q+∆q)− f (q) = [q1+∆q1]2+2[q1+∆q1][q2+∆q2]− [q2
1+2q1q2].
Incremento de un funcionalSi x y x+δx son funciones para las cuales el funcionalJ es definido, luego el incre-mento deJ, denotado por∆J, es:
∆J = J(x+δx)−J(x). (C.2)
De nuevo, se puede enfatizar que∆J(x,δx) depende tanto dex como deδx. δx es lavariacion de la funcion x.EjemploConsidere el funcional:
J(x) =∫ t f
tox2(t)dt,
dondex es una funcion contınua delx. El incremento deJ es:
209

210 C Calculo Variacional
∆J = J(x+δx)−J(x) =∫ t f
to[x+δx]2dt−
∫ t f
tox2(t)dt =
∫ t f
to[2x(t)δx(t)+ [δx(t)]2]dt.
La variaci on de un funcionalLa variacion juega el mismo rol que el diferencial en determinar los valores entremos,en el caso de la variacion se aplica al caso de unfuncionaly en el caso del diferencial se aplica al caso de unafuncion.
POR COMPLETAR...
Fuente: Capıtulo 4 del libroOptimal Controlde Donald Kirk, Springer, 1970.Fuente: Capıtulo 3 del libroOptimal Controlde Lewis y Syrmos, Wiley, 1995.





























