Embed Size (px)
Citation preview

Elizabeth Villota
Control Clasico y Moderno
– Notas de Clase MT221 –
29 de abril de 2012
Springer


Indice general
1. Modelado de sistemas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . 11.1. Conceptos en modelado . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1. Contribucion al modelado de la mecanica y de la ingenierıa electrica . . . . . . . . . . . . . . . . . . . . . . 11.2. Modelos espacio de estados . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2.1. Ecuacion diferencial ordinaria . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . 31.2.2. Ecuacion en diferencias finitas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 5
1.3. Ejemplo: Control de rapidez (control crucero) . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.4. Mas sobre modelado de sistemas . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.5. Mas ejemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5.1. Ejemplo: Circuito RLC . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.5.2. Ejemplo: Motor DC y acoplamiento flexible . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.5.3. Ejemplo: Diagrama de bloques del motor DC . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.5.4. Ejemplo: Doble filtro pasa-baja RC . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.5.5. Ejemplo: Horno electrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . 14
2. Sistemas Lineales. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 172.1. Definiciones basicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.1. Linealidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.1.2. Invariancia en el tiempo . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2. Respuesta a la condicion inicial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . 192.2.1. Ejemplo: Integrador doble . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2.2. Ejemplo: Oscilador sin amortiguamiento . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.3. Respuesta entrada/salida . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.3.1. Ecuacion de convolucion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 222.3.2. Respuesta en estado estacionario . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4. Polos, ceros y ganancia . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.5. Otros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
V

Capıtulo 1Modelado de sistemas
Un modelo es una representacion puntual de la dinamica del sistema y es usada con la finalidad de responderpreguntas mediante analisis y simulacion. El modelo que se elige depende del tipo de preguntas que sedesee responder,y como tal, existe mas de un tipo de modelo para un mismo sistema dinamico, con diferentes niveles de fidelidaddependiendo del fenomeno de interes.
1.1. Conceptos en modelado
Un modeloes una representacion matematica de un sistema fısico, biologico o de informacion. El modelo permiterazonar en relacion al sistema y hacer predicciones con respecto a como se comportara un sistema. En esta parte nuestrointeres es emplear modelos de sistemas dinamicos que describan el comportamiento entrada/salida de un sistema y paraesto adoptaremos la representacion en la forma espacio de estados.
En su forma mas elemental, unsistema dinamicoes aquel donde los efectos de las acciones (entradas) no se presen-tan inmediatamente. Por ejemplo, la rapidez de un vehıculo no cambia inmediatamente despues de presionado el pedaldel freno, asi como tampoco un dolor de cabeza desaparece justo despues de haber tomado una aspirina. Un ejemploen elambito financiero serıa que los beneficios de una inversion no se perciben a corto plazo, estos se presentan solo alargo plazo (si fue una buena inversion). Como caracterıstica fundamental todos estos ejemplos de sistemas dinamicospresentan un comportamiento que evoluciona en el tiempo.
1.1.1. Contribucion al modelado de la mecanica y de la ingenierıa electrica
En mecanica, el estudio de la dinamica surgio al intentar describir el movimiento planetario1. Uno de los triunfosde la mecanica Newtoniana fue la observacion de que el movimiento de los planetas podıa ser predecida en base a lasposiciones y velocidades actuales de todos los planetas. Elestadode un sistema dinamico es la coleccion de variablesque caracteriza completamente el movimiento de un sistema con el proposito de predecir el movimiento futuro. Alconjunto de todos los estados posibles se le denominaespacio de estados.
Un clase comun de modelos matematicos para sistemas dinamicos es representado por ecuaciones diferencialesordinarias (ODE, por sus siglas en ingles). En mecanica una de esas ecuaciones diferenciales es:
mq+c(q)+kq= u, (1.1)
dondeu representa el efecto de entradas externas. El modelo (1.1) es llamadoecuacion diferencial controladao forza-da. Cuandou = 0, el modelo se denominaecuacion diferencial libre. Este modelo puede facilmente representar unsistema dinamico tal como el sistema masa-resorte con amortiguamiento, ver Fig. 1.1. La variableq∈ R representa laposicion de la masam con respecto a su posicion de reposo. Se emplea ˙q para referirse a la derivada con respecto al
1 En base a la observacion detallada de los planetas realizada por Tycho Brahe y los resultados de Kepler, se encontro empiricamente quelasorbitas de los planetas podıan ser descritas por elipses.
1

2 1 Modelado de sistemas
tiempo deq (velocidad de la masa) y ¨q para representar a la segunda derivada (aceleracion). Decimos que elsistema esde segunda ordendado que la dinamica depende de las dos primeras derivadas deq.
c (q)
q
m
k
Figura 1.1 Masa-resorte con amortiguamiento
La evolucion de la posicion y la velocidad pueden ser descritos usando ya sea una grafica en el tiempo o un diagramadel plano de fase, ambos mostrados en Fig. 1.2. Lagrafica en el tiempomuestra los valores de los estados individual-mente como funcion del tiempo. Eldiagrama del plano de fasemuestra la evolucion de la velocidad en relacion a laposicion, permitiendo asi visualizar elcampo vectorialdel sistema (velocidad denotada por las flechas).
0 5 10 15−2
−1
0
1
2
Time t [s]
Positionq[m],velocityq[m/s]
Position
Velocity
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
Position q [m]
Velocityq[m/s]
Figura 1.2 Ilustracion de un modelo de estados
El adicionar la entradau al sistema enriquece al sistema y permite que podamos respondar otras preguntas. Porejemplo, el efecto que los disturbios externos tienen en la trayectoria del sistema. En el caso de que se pueda manipularla variable de entradau de una forma controlada, es posible analizar si se puede llevar o no el sistema de un punto aotro en el espacio de estados a traves de una apropiada seleccion de la entrada.
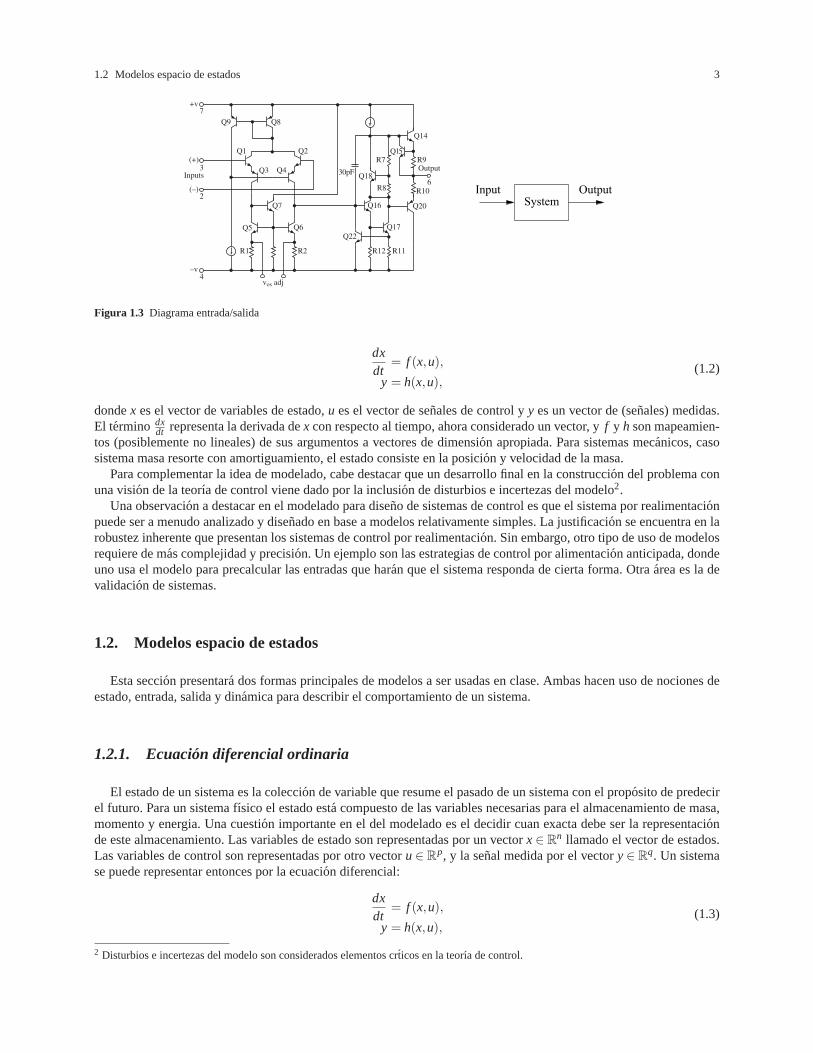
La ingenierıa electricapresento una vision diferente del modelado, donde el diseno de amplificadores electronicosllevo a un enfoque tipo entrada/salida. Un sistema era un dispositivo que transformaba entradas en salidas, comomostrado en Fig. 1.3. La estructura entrada/salida se usa enmuchas disciplinas de la ingenierıa puesto que permitedescomponer un sistema en sus componentes individuales y conectarlos a traves de sus entradas y salidas. Ası sepuede tomar un sistema complicado como una radio o television y se descompone en piezas tales como el receptor,demodulador, amplificador, parlantes, etc. Cada una de estas piezas tiene un conjunto de entradas y salidas y, a travesde un diseno apropiado, se pueden interconectar para formar el sistema completo.
Cuando lateorıa de controlemergio como una disciplina en los 1940s, el abordaje adoptado estaba fuertementeinfluenciado por la vision de la ingenierıa electrica (entrada/salida). La segunda ola de desarrollo en control se vio in-fluenciada por la mecanica, donde se uso la perspectiva espacio de estados. El afan por realizar vuelos espaciales es unejemplo tıpico de como comenzaron a fusionarse estos dos puntos de vista hasta llegar a ser lo que hoy en dia se conocecomo la representacion espacio de estados de sistemas de entrada/salida. Especıficamente, uno de los problemas que sepresento fue el de controlar laorbita de un nave espacial. Ası, el desarrollo de modelos espacio de estados involucrabamodificar los modelos mecanicos para incluir sensores y actuadores y utilizar ecuaciones con formas mas generales.Luego el modelo dado por la ecuacion (1.1) fue reemplazado por:
1.2 Modelos espacio de estados 3
7+v
–v
vos adj
(+)
(–)
InputsOutput3
2
6
4
Q9
Q1 Q2
Q3 Q4
Q7
Q5
R1 R12
R8
R7 R9
R10
R11R2
Q6Q22
Q17
Q16
Q1830pF
Q15
Q14
Q20
Q8
SystemInput Output
Figura 1.3 Diagrama entrada/salida
dxdt
= f (x,u),
y = h(x,u),(1.2)
dondex es el vector de variables de estado,u es el vector de senales de control yy es un vector de (senales) medidas.El termino dx
dt representa la derivada dex con respecto al tiempo, ahora considerado un vector, yf y h son mapeamien-tos (posiblemente no lineales) de sus argumentos a vectoresde dimension apropiada. Para sistemas mecanicos, casosistema masa resorte con amortiguamiento, el estado consiste en la posicion y velocidad de la masa.
Para complementar la idea de modelado, cabe destacar que un desarrollo final en la construccion del problema conuna vision de la teorıa de control viene dado por la inclusion de disturbios e incertezas del modelo2.
Una observacion a destacar en el modelado para diseno de sistemas de control es que el sistema por realimentacionpuede ser a menudo analizado y disenado en base a modelos relativamente simples. La justificacion se encuentra en larobustez inherente que presentan los sistemas de control por realimentacion. Sin embargo, otro tipo de uso de modelosrequiere de mas complejidad y precision. Un ejemplo son las estrategias de control por alimentacion anticipada, dondeuno usa el modelo para precalcular las entradas que haran que el sistema responda de cierta forma. Otraarea es la devalidacion de sistemas.
1.2. Modelos espacio de estados
Esta seccion presentara dos formas principales de modelos a ser usadas en clase. Ambas hacen uso de nociones deestado, entrada, salida y dinamica para describir el comportamiento de un sistema.
1.2.1. Ecuacion diferencial ordinaria
El estado de un sistema es la coleccion de variable que resume el pasado de un sistema con el proposito de predecirel futuro. Para un sistema fısico el estado esta compuesto de las variables necesarias para el almacenamiento de masa,momento y energia. Una cuestion importante en el del modelado es el decidir cuan exacta debe ser la representacionde este almacenamiento. Las variables de estado son representadas por un vectorx∈ R
n llamado el vector de estados.Las variables de control son representadas por otro vectoru∈ R
p, y la senal medida por el vectory∈ Rq. Un sistema
se puede representar entonces por la ecuacion diferencial:
dxdt
= f (x,u),
y = h(x,u),(1.3)
2 Disturbios e incertezas del modelo son considerados elementos crticos en la teorıa de control.

4 1 Modelado de sistemas
donde f : Rn×Rp 7→ R
n y h : Rn×Rp 7→ R
q son mapeamientos suaves. Un modelo de esta forma se llamamodeloespacio de estados.
La dimension del vector de estados es llamadaordendel sistema. El sistema (1.4) es llamadoinvariante en el tiempoporquef y h no dependen explicitamente del tiempot; existen sistemas variantes en el tiempo mas generales donde lasfunciones si dependen del tiempo. El modelo consiste en dos funciones: la funcion f que provee la variacion del vectorde estados con respecto al tiempo en funcion del estadox y el controlu, y la funcion h que provee los valores medidocomo funcion del estadox y del controlu.
Un sistema se denomina sistema de espacio de estadoslineal si las funcionesf y h son lineales enx y u. Un sistemaespacio de estados lineal puede ser representado por:
dxdt
= Ax+Bu,
y =Cx+Du,(1.4)
dondeA, B,C y D son matrices. Si estas matrices son constantes, entonces sedice que tal sistema es lineal e invarianteen el tiempo, LTI por sus siglas en ingles. La matrizA es llamadamatriz dinamicao matriz de estados, la matrizB esllamada lamatriz de controlo matriz de entradas, la matrizC es llamadamatriz del sensoro matriz de salidas, y lamatrizD es llamada lamatriz del termino directo.
Generalizando la ecuacion dinamica de segundo orden estudiada en mecanica, resulta una ecuacion de la forma:
dnydtn
+an−1dn−1ydtn−1 + ...+aoy= u, (1.5)
dondet es la variable independiente,y(t) es la variable de (salida) dependiente yu(t) es la entrada. La notaciondkydtk
denota lak-esima derivada con respecto a tiempot, a veces denotada pory(k). La ecuacion diferencial controlada (1.5)se dice que es un sistema den-esima orden. Este sistema se puede convertir en la forma espacio estado definiendo:
x=
x1
x2...
xn−1
xn
=
ydy/dt
...dn−2y/dtn−2
dn−1y/dtn−1
, (1.6)
y la ecuacion espacio de estados resulta:
ddt
x1
x2...
xn−1
xn
=
x2
x3...
xn
−aox1− ...−an−1xn
+
00...0u
, y= x1. (1.7)
Con la definicion apropiada deA, B, C y D, esta ecuacion se puede definir en la forma espacio de estados lineal.Una forma aun mas general se obtiene dejando que la salida sea una combinacion lineal de los estados del sistema,
por ejemplo:y= b1x1+b2x2+ ...+bnxn+du. (1.8)
Este sistema puede ser modelado en espacio de estados como:

1.2 Modelos espacio de estados 5
ddt
x1
x2
x3...
xn
=
0 1 ... 0 0...
...0 0 1 00 0 ... 0 1
−a0 −a1 ... −an−2 −an−1
x+
00...01
u,
y=[b1 b2 ... bn
]x+du.
(1.9)
Esta forma particular de un sistema lineal en espacio de estados se llamaforma canonica controlable.La ecuacion (1.4) puede ser dibujada como un diagrama de bloques en la Fig. 1.4. Las dobles lineas indican que
cantidades vectoriales (multiples variables) son pasadas entre los bloques.
+
+
A
CB ∫x(t)u(t) x(t)· y(t)
D
++
Block diagram of a
general continuous linear
Figura 1.4 Diagrama de bloques de un modelo espacio de estados lineal contınuo general
1.2.2. Ecuacion en diferencias finitas
Muchas veces resulta mas natural describir la evolucion de un sistema en instantes de tiempo discretos en vez decontinuamente en el tiempo. Si uno se refiere a cada uno de estos tiempos usando un numero enterok = 0,1,2...,entonces se puede hacer la pregunta de como cambia el estado para cadak. Como se hizo en el caso de ecuacionesdiferenciales ordinarias, se define como estado a los conjuntos de variable que resumen el pasado del sistema parapropositos de prediccion de su futuro. Los sistemas que se describen de esa manera sedenominansistemas de tiempodiscretoo sistemas discretos.
La evolucion de un sistema discreto se puede escribir de la forma:
x[k+1] = f (x[k],u[k]),y[k] = h(x[k],u[k]),
(1.10)
dondex[k] ∈Rn es el estado del sistema en el tiempok, u[k] ∈R
p es la entrada yy[k] ∈Rq es la salida. Como antes,f y
h son mapeamientos suaves de dimension apropiada. La ecuacion (1.10) se denominaecuacion en diferenciasporquenos dice comox[k+1] difiere dex[k]. El estadox[k] puede ser una cantidad escalar o un vector; en caso de ser un vectorusaremosx j [k] para denotar alj-esimo elemento del vectorx (o j-esimo estado) en el instante de tiempok.
Como en el caso de ecuaciones diferenciales, a menudo las ecuaciones son lineales en el estado y la entrada, encuyo caso el sistema puede ser descrito por:
x[k+1] = Ax[k]+Bu[k],y[k] =Cx[k]+Du[k],
(1.11)
Como en el caso anterior, nos referimos a las matricesA, B, C y D como matriz de la dinamica, la matriz de control,matriz del sensor y matriz del termino directo.

6 1 Modelado de sistemas
1.3. Ejemplo: Control de rapidez (control crucero)
El control de rapidez de un vehıculo es un problema comun de sistema por realimentacion que encontramos ennuestro quehacer diario. El sistema intenta mantener una rapidez constante en la presencia de disturbios. El controlcompensa el efecto de los disturbios midiendo la rapidez delvehıculo y ajustando la valvula de alimentacion de com-bustible apropiadamente (para acelerar o desacelerar).
Para modelar el sistema tenemos el diagrama de bloques de la Fig. 1.5. Seav la rapidez del carro yvr la rapidez(deseada) referencia. El controlador recibe las senalesv y vr y genera la senal de controlu que es enviada al actuadorque controla la posicion de la valvula de alimentacion. La posicion de la valvula de alimentacion a su vez controla eltorque desarrollado por el motor, que es transmitido a traves de los engranajes y las ruedas, generando una fuerzaF quemueve el carro. Existen duerzas de disturbiosFd debido a las variaciones en la pendiente de la superficie, la resistenciaal deslizamiento de las ruedas y fuerzas aerodinamicas. El control de rapidez tambien tiene una interface humano-maquina que permite que el conductor establezca y modifique larapidez de referencia. Tambien existen funciones quedesconectan el control de rapidez cuando se presiona el freno.
Gears &
Actuator
vr
Controller
BodyThrottle &
Engine
Fd
v
cancel
resume/accel
set/decel
on/off
Driver
Interface
T F
u
Wheels
Figura 1.5 Diagrama de bloques del control de rapidez
Para comenzar a desarrollar un modelo matematico comenzamos con un balance de fuerzas para el cuerpo delvehiculo. Seav la rapidez del vehiculo,mes la masa total (incluyendo pasajeros),F es la fuerza generada por el motory Fd es la fuerza de disturbio debido a la aceleracion de la gravedad, friccion y arrastre aerodinamico. La ecuacion demovimiento del carro es:
mdvdt
= F −Fd. (1.12)
La fuerzaF es generada por el motor, cuyo torqueT es proporcional a la razon de inyeccion de combustible, que es asu vez proporcional a la senal de control 0≤ u≤ 1 que controla la posicion de la valvula de alimentacion. El torquedepende de la velocidad angular del motorω. El torque puede ser representado por la siguiente expresion:
T(ω) = Tm(1−β (ωωm
−1)2), (1.13)
dondeTm es el torque maximo obtenido a la velocidad angular del motorωm. Parametros tipicos sonTm = 190Nm,ωm = 420rad/s (para 4000 rpm) yβ = 0,4. Sean la razon de los engranajes yr el radio de la rueda.La velocidad delmotor es relacionada a la rapidez a trav’es de:
ω =nr
v= αnv, (1.14)
y la fuerzaF se puede escribir como:
F =nur
T(ω) = αnuT(αnv). (1.15)
Valores tıpicos deαn para engranajes del 1 al 5 sonα1 = 40,α2 = 25,α3 = 16,α4 = 12 y α5 = 10.La fuerza de disturbio tiene tres componentes principales:Fg, fuerzas debido a la accion de la gravedad;Fr , fuerza
debido a la resistencia al deslizamiento; yFa, fuerza del arrastre aerodinamico. Si asumimos una pendiente de lasuperficieθ , la gravedad dota de la fuerzaFg = mgsinθ , como mostrado en la Fig. 1.6, dondeg= 9,8m/s2. Un modelosimple de friccion es:

1.4 Mas sobre modelado de sistemas 7
Fr = mgCrsgn(v),
Cr = 0,01 es coeficiente de friccion, sgn es la funcion signo dev (±1) o cero siv= 0. Un valor tipico deCr es 0.01.Finalmente, el arrastre aerodinamico es proporcional al cuadrado de la rapidez:
Fa =12
ρCdAv2,
dondeρ = 1,3 kg/m3 es la densidad del aire,Cd = 0,32 es el coeficiente de arrastre aerodinamico que depende de laforma del vehiculo,A= 2,4m2 es elarea frontal del carro.
Resumiendo, encontramso que el carro puede ser modelado por:
mdvdt
= αnuT(αnv)+−mgCrsgn(v)−12
ρCdAv2−mgsinθ .
El modelo es un sistema dinamico de primer orden. El estado es la rapidez del vehiculo, que tambien es la salida. Laentrada es la senalu que controla la posicion de la valvula de alimentacion, y el disturbio e sla fuerzaFd, que pedendede la pendiente de la superficie. El sistema es no lineal puesto que el torque se define como en (1.13), el terminorelacionado a la fuerza gravitacional y el caracter no lineal de la friccion y arrastre aerodinamico.
gF
mg
F
θ
Figura 1.6 Efecto de las fuerzas gravitacionales
1.4. Mas sobre modelado de sistemas
El principal objetivo del analisis de sistemas es la prediccion de la forma en la que el sistema respondera a variasentradas y comoestas respuestas cambian para diferentes valores de los parametros del sistema. En la ausencia delmodelado de sistemas, los ingenieros se ven forzados a construir prototipos del sistema para poder probarlos. Losdatos obtenidos en las pruebas de los prototipos fısicos son muy valiosos, sin embargo los costos en tiempo y dineropara obtener estos datos muchas veces no permiten su realizacion. Adicionalmente, los modelos matematicos soninherentemente mas flexibles que los prototipos fısicos y permiten un rapido refinamiento de los disenos del sistemapara optimizar varias medidas de desempeno. En consecuencia, uno de los objetivos del analisis de sistemas es elestablecer un modelo matematico adecuado que pueda ser usado para obtener informacion equivalente a la que sepodra conseguir de varios prototipos fısicos diferentes. De esta forma, aun si un prototipo final es construido paraverificar el modelo matematico, el modelador se ha ahorrado un tiempo y dinero significativos.
Un modelo matematico es un conjunto de ecuaciones que describe completamente las relaciones entre las variablesdel sistema. Es usado como una herramienta para desarrollardisenos y algoritmos de control, y la tarea principal para laque sera usado tiene implicaciones basicas para la eleccion del modelo del sistema. De ahi que los modelos del sistemadeben ser lo mas simples posible, y cada modelo debe ser desarrollado con alguna aplicacion especıfica en mente. Dehecho, de esta forma se tendra diferentes modelos construidos para diferentes usos del mismo sistema. En el caso demodelos matematicos, diferentes tipos de ecuaciones seran usadas para describir al sistema en sus varias aplicaciones.
La Tabla 1 clasifica a los modelos del sistema de acuerdo a los cuatro criterios mas comunes: aplicacion del principiode superposicion, dependencia en coordenadas espaciales ası como en el tiempo, variacion de los parametros en eltiempo, y continuidad de las variables independientes. En base a estos criterios, los modelos de sistemas dinamicos sonclasificados como lineales y no lineales, concentrados y distribuidos, estacionarios invariantes en el tiempo o variantes

8 1 Modelado de sistemas
en el tiempo, contınuos o discretos, respectivamente. Cada clase de modelo estambien caracterizada por el tipo deecuacion matematica empleada en la descripcion del sistema.
Tipo de modelo Criterio de clasificacion Tipo de ecuacion de modeloNolineal Principio de superposicion no aplica Ecuaciones diferenciales no linealesLineal Principio de superposicion aplica Ecuaciones diferenciales linealesDistribuido Variables dependientes son funcion de co-
ordenadas espaciales y el tiempoEcuaciones diferenciales parciales
Concentrado Variables dependientes son independi-entes de las coordenadas espaciales
Ecuaciones diferenciales ordinarias
Variantes en el tiempoParametros del modelo varian en el tiem-po
Ecuaciones diferenciales con coeficientesque varian tiempo
Estacionario Parametros del modelo son constantes enel tiempo
Ecuaciones diferenciales con coeficientesconstantes
Contınuo Variables dependientes definidas sobrerango contınuo de variables independi-entes
Ecuaciones diferenciales
Discreto Variables dependientes definidas solo paradistintos valores de variables independi-entes
Ecuaciones por diferencias finitas
Cuadro 1.1 Clasificacion de modelos del sistema
1.5. Mas ejemplos
1.5.1. Ejemplo: Circuito RLC
Se desea formular un modelo donde el voltaje terminalv sea la entrada y el voltaje en el capacitorvC sea la salida.Las leyes de Ohm y Kirchoff permiten obtener la siguiente relacion para los voltajes:
Ri(t)+Ldi(t)dt
+vC(t) = v(t). (1.16)
Para el capacitor se sabe que:
CvC(t) = q(t)→CdvC(t)
dt=
dq(t)dt
= i(t). (1.17)
De estas ecuaciones se puede ver inmediatamente que:
i =−RL
i −1L
vC+1L
v,
vC =1C
i.(1.18)
La dependencia del tiempo se ha omitido por simplicidad.
R L
C
vC
i
v
Figura 1.7 Circuito RLC

1.5 Mas ejemplos 9
El sistema puede ser descrito por las dos ecuaciones diferenciales de primer orden acopladas mostradas en (1.18).Reescribiendo las ecuaciones en la forma de espacio de estados:
[i
vC
]
=
−RL
−1L
1C
0
[i
vC
]
+
[ 1L0
]
v. (1.19)
Si las variables de estado y las matrices del sistema son definidas como:
x=
[i
vC
]
, x=
[i
vC
]
,A=
−RL
−1L
1C
0
,B=
[ 1L0
]
,u= v,
la ecuacion (1.19) puede ser reescrita en forma compacta como:
x= Ax+Bu.
Un diagrama de bloques del sistema es mostrado en la Fig. 1.8.Notar que los elementos del vector de estadosx, i(t) y
∫R
L---
1
L---
1
C----
1
L--- ∫
v t( ) i t( ) i t( ) v·c t( ) vc t( )+
__
Figura 1.8 Diagrama de bloques del circuito RLC
vC(t), son salidas de los dos integradores en el diagrama de bloques.Dado que el voltaje del capacitor es la salida. Una segunda ecuacion debe ser aumentada a la descripcion del
problema, la ecuacion de salida:y= vC =
[0 1
]x. (1.20)
La combinacion de (1.19) y (1.20) es llamada el modelo espacio de estados del sistema.La transformada de Laplace de (1.18) lleva al modelo a la forma de funcion de transferencia del sistema:
G(s) =Vc(s)V(s)
=1
LCs2+RCs+1. (1.21)
1.5.2. Ejemplo: Motor DC y acoplamiento flexible
La Fig. 1.9 muestra un motor DC con acoplamiento flexible en eleje entre la inercia de la armadura del motor y lainercia de la carga.R y L son la resistencia y la inductancia del bobinado de la armadura respectivamente,k y b sonla constante de rigidez y el coeficiente de amortiguamiento (lineal) del acoplamiento flexible respectivamente y,Jm yJl son los momentos de inercia de la armadura del motor y carga respectivamente. El voltaje en la armadurau es laentrada del sistema y la posicion angular de la cargaθl es la salida.
Si las dos inercias son separadas una de la otra y los torques apropiados (Tk,Tb,Ta) aumentados como mostrado enla Fig. 1.10 (diagramas de cuerpo libre), usando la Segunda Ley de Newton (Momentos de Euler) en ambas inercias setiene:
Jmθm = Kai +k(θl −θm)+b(θl − θm)−bmθm, (1.22)
Jl θl =−k(θl −θm)−b(θl − θm)−bl θl , (1.23)

10 1 Modelado de sistemas
θm θl
k,b
R L
i
JlJm
u
Figura 1.9 Motor DC con acoplamiento flexible
dondeKa es la constante de torque,bm y bl son los factores de friccion de los rodamientos viscosos del motor y la cargarespectivamente.
θm θl
Jm Jl
State convention: θm < θl
θm < θl
· ·
Ta Tk , Tb Tk , Tb
Figura 1.10 Senal y convencion de estados para el sistema en Fig. 1.9
Las leyes de Ohm y Kirchhoff aplicadas al circuito electrico resulta en:
u= Ri+Ldidt
+keθm (1.24)
o
i =1L(u−keθm−Ri), (1.25)
dondeke es el coeficiente de induccion del bobinado de la armadura del motor.Un diagrama de bloques puede ser dibujado directamente de las ecuaciones (1.22), (1.23) y (1.25) como mostrado
en la Fig. 1.12.
1
L---
1
Jm
------
1
Jl
---- ∫∫
∫∫∫
R
b
ke
bm
Ka
k
+
_
_
+
++
_
+
_+
_
_ _
θ·
mu i·
i θm
··
θl
··θl
·
θm
θl
bl
_ x5
x1 x2x3
x4y
Figura 1.11 Diagrama de bloques del sistema motor DC con acoplamiento flexible

1.5 Mas ejemplos 11
Si se define el vector de estados de orden 5 como:
x=[
x1 x2 x3 x4 x5]T
=[
i θm θm θl θl]T
, (1.26)
y la ecuaciones de estado pueden ser escritas por inspeccion del diagrama de bloques:
x1 =−RL
x1−ke
Lx3+
1L
u,
x2 = x3,
x3 =Ka
Jmx1−
kJm
x2−b+bm
Jmx3+
kJm
x4−bJm
x5,
x4 = x5,
x5 =kJl
x2+bJl
x3−kJl
x4−b+bl
Jlx5.
(1.27)
En forma matricial la ecuacion se puede escribir como:
x=
−RL
0 −ke
L0 0
0 0 1 0 0,Ka
Jm−
kJm
−b+bm
Jm
kJm
bJm
0 0 0 0 1
0kJl
bJl
−kJl
−b+bl
Jl
x+
1L0000
u. (1.28)
La ecuacion de salida es entonces:y=
[0 0 0 1 0
]x. (1.29)
Se puede observar que el sistema motor DC con acoplamiento flexible es un sistema de orden 5: tiene 5 estados.
1
L---
1
Jm
------
1
Jl
---- ∫∫
∫∫∫
R
b
ke
bm
Ka
k
+
_
_
+
++
_
+
_+
_
_ _
θ·
mu i·
i θm
··
θl
··θl
·
θm
θl
bl
_ x5
x1 x2x3
x4y
Figura 1.12 Diagrama de bloques del sistema motor DC con acoplamiento flexible

12 1 Modelado de sistemas
1.5.3. Ejemplo: Diagrama de bloques del motor DC
El sistema electromecanico anterior tiene un acoplamiento flexible entre las dos inercias rotacionales. Si se omite laflexibilidad, esto significa que el acoplamiento es completamente rıgido, luego las ecuaciones del sistema tendran unaapariencia diferente al caso anterior.
Un acoplamiento rıgido significa que la constante de rigidez del resorte es infinita: k ≈ ∞. No se puede modificarlos elementos de las matrices (1.27, 1.28) directamente debido a que algunos de ellos serian muy grande y esto nopuede ser posible. Luego, se debe retornar al conjunto de ecuaciones en (1.22) y (1.23) y modicarlas. Es obvio que lasdos posiciones angulares ahora seran igualesθm = θl = θ y el momento de inercia y los factores de friccion de losrodamientos seran la suma:J = Jm+Jl y bb = bm+bl . Las dos ecuaciones se reducen a una sola ecuacion diferencialde segundo orden:
Jθ = Kai −bnθ . (1.30)
Las ecuaciones de la parte electrica seran las mismas que antes y el nuevo diagrama de bloques es mostrado en la Fig.1.13.
1
L---
1
J-- ∫∫∫
R
ke
bb
Ka+
_
_ + +
_
θ·
u i· i θ
··θ
x1 x2x3
y
Figura 1.13 Diagrama de bloques del sistema reducido
El numero de estados del sistema reducido es 3 y el vector de estados es como sigue:
x=[
x1 x2 x3]T
=[
i θ θ]T
, (1.31)
y las ecuaciones de estado y salida resultan:
x =
−RL
0 −ke
L0 0 1,
Ka
J0 −
bb
J
x+
1L00
u
y =[
0 1 0]x.
(1.32)
1.5.4. Ejemplo: Doble filtro pasa-baja RC
A continuacion se mostrara como derivar un modelo espacio de estados de un la red electrica pasiva mostrada en laFig. 1.14. Usando la leyes de Ohm y Kirchhoff en los tres lazosde corriente resulta:
ei = R1i1+1
C1
∫
(i1− i2)dt,
0 =1
C1
∫
(i2− i1)dt+1
C2
∫
i2dt+R2i2
−eo =−1
C2
∫
i2dt
. (1.33)

1.5 Mas ejemplos 13
Arreglando las ecuaciones,
R1i1 = ei −1
C1
∫
(i1− i2)dt,
R2i2 =1
C1
∫
(i1− i2)dt−1
C2
∫
i2dt+
eo =1
C2
∫
i2dt
, (1.34)
se llega al diagrama de bloques de la Fig. 1.15.
C1 C2
R1 R2
ei eo
i3 = 0i2i1
Figura 1.14 Red electrica simple
Luego, derivando las ecuaciones de estado directamente deldiagrama:
x1 =1
C1
(1R1
(u−x1)−1R2
(x1−x2)
)
,
x2 =1
C2
(1R2
(x1−x2)
) , (1.35)
Acomodando el modelo espacio de estados es:
x =
R1+R2
C1R1R2
1C1R2
1C2R2
−1
R2C2
x+
1C1R1
0
u,
y =[
0 1]x
(1.36)
1
R1
------
1
R2
------
∫
∫
1
C1
------
1
C2
------
+
_
+
_
+
_
eo = y
ei = u
i1
i2
x1
x2
Figura 1.15 Diagrama de bloques del sistema en Fig. 1.14

14 1 Modelado de sistemas
1.5.5. Ejemplo: Horno electrico
La Fig. 1.16 muestra un horno aislado con calentamiento electrico que contiene un producto a ser calentado. Latemperatura del aire en el horno esTs, las temperaturas del producto, material de aislamiento y aire del ambiente sonTg, Tr y Ta respectivamente. Se asume que todas las temperaturas son uniformes. La potencia para calentamiento queprovee el elemento electrico esq, y las potencias que entran al producto y aislamiento sonqg y qr . El calor perdido enel aire del ambiente esqa.
q
qg
qr
qa
Ts
Tg
Ta
Tr
Controlled
power supply
Insulation
Product u
Figura 1.16 Horno calentado electricamente
La potencia del elemento electrico es controlada de forma lineal tal que:
q= ku, (1.37)
dondek es una constante de proporcionalidad.Se asume que el intercambio de energıa de calor es debido a conveccion y por lo tanto las potencias y las temperat-
uras estan relacionadas por:qg = kg(Ts−Tg),qr = kr(Ts−Tr),qa = ka(Tr −Ta),
(1.38)
donde los coeficientes-k son parametros de conveccion dependiendo delarea y la naturaleza fısica de las superficies.Si la capacidad de calentamiento total del aire en el horno, del producto y del aislamiento se denota porCs, Cg y Cr ,
se pueden formular las expresiones para la razon de variacion de la temperatura de las diferentes partes del sistema.Luego se tiene que:
CsdTs
dt= q−qg−qr ,
CgdTg
dt= qg,
CrdTr
dt= qr −qa.
(1.39)
Un diagrama de bloques del modelo se puede ver en la Fig.1.17.De la ecuacion diferencial (1.39) se puede determinar la siguiente eleccion de variables de estado:
x=
x1
x2
x3
=
Ts
Tg
Tr
(1.40)
Con entradau, el disturbiov= Ta y la saliday= Tg, se puede obtener el conjunto de ecuaciones del modelo espacio deestados. Realizando la sustotucion apropiada en (1.39). El resultado es:

1.5 Mas ejemplos 15
x1 =1Cs
(ku−kg(x1−x2)−kr(x1−x3)) ,
x2 =1
Cgkg(x1−x2),
x3 =1Cr
(kr(x1−x3)−ka(x3−v)) ,
(1.41)
o en la forma vectorial-matricial:
x =
−kg+kr
Cs
kg
Cs
kr
Cskg
Cg−
kg
Cg0
kr
Cr0 −
kr +ka
Cr
x+
kCs00
u+
00ka
Cr
v,
y =[
0 1 0]x
(1.42)
∫
∫
kg
kr
ka
∫
1
Cs
-----
1
Cr
-----
1
Cg
------
k
+
_
+
_
+
_
+
_ _
+
_
Ts
Tg
Tr
Ta
u
y
qg
qr
qa
Block diagram of
the oven production system
Figura 1.17 Diagrama de bloques del sistema en Fig. 1.16
Fuente: Capıtulos 2 y 3 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astromy Richard M. Murray.
Fuente: Capıtulo 1 del libroDynamic Modeling and Control of Engineering Systems, de B. Kulakowski, J. Gardnery L. Shearer.
Fuente: Capıtulo 2 del libroLinear Systems Control: Deterministic and Stochastic Methods, de E. Hendricks, O.Jannerup y P. Sorensen.


Capıtulo 2Sistemas Lineales
En esta parte del curso nos centraremos en el caso de sistemaslineales invariantes en el tiempo y analizaremos elefecto de las condiciones iniciales y las entradas en las salidas. Los conceptos centrales de matriz exponencial y laecuacion convolucion nos permitiran caracterizar completamente el sistema.
Durante las clases anteriores hemos visto varios ejemplos donde los sistemas son modelados usando ecuacionesdiferenciales lineales. En general, varios sistemas dinamicos pueden ser modelados de forma precisa usando ecuacionesdiferenciales lineales. Ası, sistemas mecanicos y circuitos electricos son ejemplos donde los modelos lineales puedenser usados efectivamente. En muchos casos, nosotros creamos sistemas con una respuesta de entrada/salida lineal.Por ejemplo, casi todos los sistemas modernos de procesamiento de senales, ya sean analogicos o digitales, usanrealimentacion para producir caracterısticas de entrada/salida lineales o casi-lineales. Para estos sistemas, a menudoesutil representar las caracterısticas de entrada/salida como lineales, ignorando los detalles internos requeridos paraobtener la respuesta lineal. Para otros sistemas, sin embargo, las no linealidades no pueden ser ignoradas, especialmentesi uno se importa en el comportamiento global del sistema. Sin embargo, si solo nos importa lo que pasa cerca del puntode equilibrio, es suficiente aproximar la dinamica no lineal por su linealizacion local.
2.1. Definiciones basicas
2.1.1. Linealidad
Considerando el sistema en la forma espacio de estados y su correspondiente ecuacion de salida:
dxdt
= f (x,u), y= h(x,u), (2.1)
dondex∈ Rn, x∈ R
p y y∈ Rq. Sean(xe,ue) 6= 0 las condiciones de operacion, y definiendo:
x= x−xe, u= u−ue, y= y−ye. (2.2)
podemos reescribir las ecuaciones de movimiento usando como punto de equilibrio del sistema al origen ˜x= 0 y u= 0.Luego tenemos:
ddt
x = f (xe+ x,ue+ u) = f (x, u),
y = h(xe+ x,ue+ u)−ye = h(x, u).(2.3)
En el nuevo conjunto de variables, el origen es un punto de equilibrio con salida cero. Una vez realizado el analisisen este nuevo conjunto de variables, las respuestas obtenidas seran trasladadas de vuelta a las coordinadas inicialesusandox= xe+ x, u= ue+ u y y= ye+ y.
Para el sistema (2.1), asumiendo, sin perdida de generalidad, que el origen es el punto de equilibrio de interes,escribiremos la saliday(t) correspondiente a la condicion inicialx(0) = xo y entradau(t) comoy(t;xo,u). Usando estanotacion, un sistema de entrada/salida es lineal si las siguientescondiciones son satisfechas:
17

18 2 Sistemas Lineales
i) y(t;αx1+βx2,0) = αy(t;x1,0)+βy(t;x2,0)ii) y(t;αxo,δu) = αy(t;xo,0)+δy(t;0,u)iii ) y(t;0,δu1+ γu2) = δy(t;0,u1)+ γy(t;0,u2).
(2.4)
Luego definimos que un sistema eslineal si las salidas son conjuntamente lineales en la respuesta a las condicionesiniciales (u= 0) y la respuesta forzada (x(0) = 0). La propiedadiii ) esta relacionada alprincipio de superposicion: larespuesta de un sistema lineal a la suma de dos entradasu1 y u2 es la suma de las salidasy1 y y2 correspondientes acada entrada.
La forma general del sistema lineal en la forma de espacio de estados, con correspondiente ecuacion de salida, es:
dxdt
= Ax+Bu, x(0) = xo
y =Cx+Du,(2.5)
dondeA∈Rn×n, B∈R
n×p, C∈Rq×n y D ∈R
q×p. La ecuacion (2.5) es un sistema de ecuaciones diferenciales linealesde primer orden con entradau, estadox y saliday. Es facil mostrar que dos soluciones dadasx1(t) y x2(t) para estesistema de ecuaciones, satisfacen las condiciones de linealidad.
Definiendoxh(t) como la solucion con entrada cero (solucion homogenea) y la solucionxp(t) como la solucion concondiciones iniciales igual a cero (solucion particular). La Fig. 2.1 ilustra como dos soluciones individuales se puedensuperponer para formar la solucion completa.
0 20 40 60−2
0
2
Homogeneous
Input u
0 20 40 60−2
0
2
0 20 40 60−2
0
2Output y
0 20 40 60−2
0
2
Particular
0 20 40 60−2
0
2
0 20 40 60−2
0
2
0 20 40 60−2
0
2
Complete
Time t [sec]0 20 40 60
−2
0
2
Time t [sec]0 20 40 60
−2
0
2
Time t [sec]
State x1, x2
Figura 2.1 Superposicion de soluciones particulares y homogeneas.
Respuesta total = respuesta a entrada cero + respuesta a condiciones iniciales cero
2.1.2. Invariancia en el tiempo
Invariancia en el tiempo es un concepto importante que se usapara describir un sistema cuyas propiedades nocambian en el tiempo. Mas precisamente, para un sistema invariante en el tiempo, sila entradau(t) resulta eny(t), luegomoviendo el tiempo en el que se aplica la entrada por una constantea, u(t+a), la salida resulta eny(t+a). Los sistemasque son lineales e invariantes en el tiempo a menudo se denominan sistemas LTI (linear time invariant, por sus siglasen ingles) y poseen una propiedad interesante: su respuesta a una entrada arbitraria esta completamente caracterizadapor sus respuesta a entradas del tipo escalon o sus respuestas a impulsos cortos. Ver mas detalle a continuacion.

2.2 Respuesta a la condicion inicial 19
Descripcion entrada-salida, sistema LTI
Suponiendo que el sistema se encuentra inicialmente en el punto de equilibrio (respuesta a las condiciones inicialeses cero), la respuesta a una entrada se puede obtener al superponer las respuestas a una combinacion de entradas tipoescalon. Un ejemplo de este calculo esta dado en la Fig.??. La Fig.??(a) muestra una entradau(t) lineal por partes(suma de funciones escalon). SeaH(t) la respuesta a un escalon unitario aplicado en el tiempo 0. La respuesta al primerescalon es entoncesH(t − to)u(to), la respuesta al segundo escalon esH(t − t1)(u(t1)− u(to)), y ası sucesivamente.Luego, podemos encontrar la respuesta completa del sistemasiendo dada por:
y(t) = H(t − to)u(to)+H(t − t1)(u(t1)−u(to))+ ...= (H(t − to)−H(t − t1))u(to)+(H(t − t1)−H(t − t2))u(t1)+ ...
=∞
∑n=0
(H(t − tn)−H(t − tn+1))u(tn)
=∞
∑n=0
(H(t − tn)−H(t − tn+1))
tn+1− tnu(tn)(tn+1− tn),
(2.6)
como mostrado en la Fig.??(b). La respuesta a una senal contınua se obtiene tomando el lımite cuandotn+1− tn → 0,que resulta en:
y(t) =∫ ∞
0H ′(t − τ)u(τ)dτ , (2.7)
dondeH ′ es la derivada de la respuesta al escalon, tambien llamadarespuesta impulsiva h. Luego, la respuesta deun sistema LTI a cualquier entrada puede ser calculada a partir de la respuesta al escalon. Notese que la salida solodepende de la entrada pues consideramos que el sistema esta en reposo al inicio,x(0) = 0).
Siendo el sistemacausal(sistema donde la salida depende de las entradas pasadas o actuales pero no de entradasfuturas), se tiene que la salida para todo sistema LTI causalen reposo al inicio esta descrita por:
y(t) =∫ t
0h(t − τ)u(τ)dτ =
∫ t
0h(τ)u(t − τ)dτ , (2.8)
La segunda igualdad puede ser facilmente verificada haciendo un cambio de variable (t − τ = σ ). La integracion en(2.8) es llamada unaintegracion convolucion.
0 2 4 6 80
0.2
0.4
0.6
0.8
1
Time (sec)
Input
(u)
u(t0)
u(t1)
u(t1)−u(t0)
0 5 10 15
−0.5
0
0.5
1
Time (sec)
Outp
ut
(y)
Complete
Steps
Figura 2.2 (a) Respuesta a entradas contınuas por partes y (b) salida resultante de la suma de entradas individuales.
2.2. Respuesta a la condicion inicial
La ecuacion (2.7) muestra que la salida de un sistema lineal se puede expresar como un integral sobre todas lasentradasu(t). En esta seccion derivaremos una formula mas general, que incluye las condiciones iniciales diferentesde cero.
En esta seccion calcularemos la solucion de un sistema de la forma:

20 2 Sistemas Lineales
dxdt
= Ax, x(0) = xo. (2.9)
Para la ecuacion diferencial escalar se tiene:
dxdt
= ax, x∈ R,a∈ R (2.10)
y la solucion esta dada por:x(t) = eatx(0). (2.11)
Generalizando para cuandoA se convierte en una matriz. Definimos elexponencial de matricescomo una serie infinita:
eX = I +X+12
X2+13!
X3+ ...=∞
∑k=0
1k!
Xk, (2.12)
dondeX ∈ Rn×n es una matriz cuadrada yI es la matriz identidadn×n.
ReemplazandoX en (2.9) porAt, dondet ∈ R, tenemos que:
eAt = I +At+12
A2t2+13!
A3t3+ ...=∞
∑k=0
1k!
Aktk, (2.13)
luego diferenciando la expresion en (2.13) con respecto al tiempo resulta en:
ddt
eAt = A+A2t +12
A3t2+ ...= A∞
∑k=0
1k!
Aktk = AeAt. (2.14)
Multiplicando porx(0) por la derecha, encontramos quex(t) = eAtx(0) es la solucion a la ecuacion diferencial (??) concondiciones inicialesx(0). La matrizΦ(t) = eAt es denominadamatriz de transicion.
Tomando la transformada de Laplace en (2.14), sabiendo queL [dh(t)/dt] = sL [h(t)]−h(0), tenemos:
sL (eAt)−e0 = AL (eAt)
(sI−A)L (eAt) = I .
Entonces, siA no tiene autovalores en el eje imaginario, obtenemos:
L (eAt) = (sI−A)−1. (2.15)
2.2.1. Ejemplo: Integrador doble
Un sistema lineal muy simple que puede ser usado para enteubnder conceptos basicos es la ecuacion diferencial desegunda orden dada por:
q= u, y= q.
El sistema es llamado deintegrador dobleporque su entradau es integrada dos veces para determinar la saliday. En laforma espacio de estados, escribimosx=
[q q
]Ty:
dxdt
=
[0 10 0
]
x+
[01
]
u.
La matriz dinamica de un integrador doble es:
A=
[0 10 0
]
,
y por calculo directo encontramos queA2 = 0 y entonces:

2.3 Respuesta entrada/salida 21
Φ(t) = eAt =
[1 t0 1
]
.
Entonces, la solucion homogenea (u= 0) para un integrador doble es dada por:
x(t) =
[1 t0 1
][x1(0)x2(0)
]
=
[x1(0)+ tx2(0)
x2(0)
]
.
2.2.2. Ejemplo: Oscilador sin amortiguamiento
Un modelo simple de oscilador, tal como el sistema masa-resorte sin amortiguamiento es:
q+ω2oq= u.
Poniendo el sistema en la forma de espacio de estados, la matriz dinamica del sistema puede ser escrita como:
A=
[0 ωo
−ωo 0
]
y eAt =
[cosωot sinωot−sinωot cosωot
]
.
Esta expresion paraΦ(t) = eAt se puede verificar por diferenciacion:
ddt
eAt =
[−ωosinωot ωocosωot−ωocosωot −ωosinωot
]
,
=
[0 ωo
−ωo 0
][cosωot sinωot−sinωot cosωot
]
= AeAt.
Luego la solucion esta dada por:
x(t) = eAtx(0) =
[cosωot sinωot−sinωot cosωot
][x1(0)x2(0)
]
.
Si el sistema tiene amortiguamiento:q+2ζ ωoq+ω2
oq= u,
la solucion es mas complicada, pero se puede mostrar que la matriz exponencial es de la forma:
e−ωoζ t
ζeiωdt −ζe−iωdt
2√
ζ 2−1+
eiωdt +e−iωdt
2eiωdt −e−iωdt
2√
ζ 2−1e−iωdt −eiωdt
2√
ζ 2−1
ζe−iωdt −ζeiωdt
2√
ζ 2−1+
eiωdt +e−iωdt
2
,
dondeωd = ωo
√
ζ 2−1. Notese queωd y√
ζ 2−1 pueden ser real o complejo, pero la combinacion de terminossiempre proveera un valor real para los elementos del exponencial de la matriz.
2.3. Respuesta entrada/salida
En esta seccion derivaremos la ecuacion convolucion, que incluye entradas y salidas.

22 2 Sistemas Lineales
2.3.1. Ecuacion de convolucion
Volviendo al sistema general de entrada/salida en la ecuacion (2.5). Usando la matriz exponencial , la solucion de laecuacion (2.5) se puede escribir como:
Teorema 1La solucion de la ecuacion diferencial lineal:
dxdt
= Ax+Bu, x(0) = xo
y =Cx+Du.(2.16)
esta dada por:
x(t) = eAtx(0)+∫ t
0eA(t−τ)Bu(τ)dτ (2.17)
⋄Demostracion: Diferenciando ambos lados en (2.17) y usando la propiedad (2.13) de la matriz exponencial. Luego,
por sustitucion directa1, tenemos:
dxdt
= AeAtx(0)+∫ t
0AeA(t−τ)Bu(τ)dτ +Bu(t) = Ax+Bu, (2.18)
que prueba el resultado. ⋄De las ecuaciones en (2.16) y (2.17) la relacion entrada/salida para un sistema lineal esta dado por:
y(t) =CeAtx(0)+∫ t
0CeA(t−τ)Bu(τ)dτ +Du(t). (2.19)
La ecuacion (2.19) se denominaecuacion de convolucion y representa la forma general de solucion de un sistemade ecuaciones diferenciales lineales acopladas. Esta ecuacion y la ecuacion (14) han sido directamente calculadas en eldominio del tiempo. Tambien podemos calcular las soluciones en el dominio de la frecuencia usando la transformadade Laplace. Aplicando la transformada de Laplace a la ecuacion (2.18) resulta:
X(s) = (sI−A)−1[x(0)+BU(s)]
Y(s) =C(sI−A)−1x(0)+ [C(sI−A)−1B+D]U(s)(2.20)
Respuesta impulsiva
La respuesta impulsiva de un sistema vendrıa a ser la salida correspondiente a tener un impulso como entrada en(2.19):
y(t) =∫ t
0CeA(t−τ)Bδ (τ)dτ +Dδ (t) =CeAtB+Dδ (t), (2.21)
donde la segunda igualdad sigue del hecho queδ (t) es cero en cualquier lugar excepto el origen y su integral esidenticamente igual a 1. Notese que existe una limitacion en el calculo de la respuesta impulsiva cuandoD 6= 0 ya queDδ (t) se hace infinito ent = 0. En la practica, se ignora la matrizD y la respuesta impulsiva viene dada por:
y(t) = h(t) =∫ t
0CeA(t−τ)Bδ (τ)dτ =CeAtB. (2.22)
Escribiendo la ecuacion de convolucion en terminos de la respuesta a las condiciones iniciales y la integral convolucion(2.8) de la respuesta impulsivah(t) y la senal de entradau(t), se tiene:
y(t) =CeAtx(0)+∫ t
0h(t − τ)u(τ)dτ , (2.23)
1 ∂∂ t
∫ tto f (t,τ)dτ = f (t,τ)|τ=t +
∫ tto
∂∂ t f (t,τ)dτ.

2.3 Respuesta entrada/salida 23
ası la respuesta de un sistema lineal es la superposisicion de la respuesta a un conjunto infinito de impulsos cuyasmagnitudes estan dadas por la entradau(t).
El uso de pulsos como aproximaciones de la funcion impulso se puede visualizar en la Fig. 2.3.
0 2 4 6 8 100
0.5
1
1.5
u
Time t
(a) Pulse and impulse functions
0 10 20 30 400
0.5
1
t
y
Pulse responses
Impulse response
(b) Pulse and impulse responses
Figura 2.3 Respuesta de un sistema a entradas del tipo impulso representado como la suma de diferentes anchos de pulso. (a) Funcionespulso e impulso. b) Respuestas a los pulsos e impulso.
2.3.2. Respuesta en estado estacionario
Dada el sistema lineal de entrada/salida:
dxdt
= Ax+Bu, x(0) = xo
y =Cx+Du.
la forma general de su solucion esta dada por (2.19), reescrita aqui por conveniencia:
y(t) =CeAtx(0)+∫ t
0CeA(t−τ)Bu(τ)dτ +Du(t),
que muestra que la respuesta total del sistema consta de la respuesta a las condiciones iniciales y la respuesta a laentrada. La respuesta a la entrada esta compuesta por los dosultimos terminos de (2.19)- esta respuesta a su vez tienedos componentes - larespuesta transientey la respuesta en estado estacionario, ver Fig 2.4. La respuesta transienteocurre en el primer periodo de tiempo despues de que la entrada ha sido aplicada y refleja la diferencia entre lascondiciones iniciales y la solucion en estado estacionario. La respuesta en estado estacionario es la porcion de larespuesta en la salida que refleja el comportamiento del sistema a largo plazo bajo la accion de ciertas entradas. Paraentradas periodicas la respuesta en estado estacionario tambien sera periodica, y para entradas constantes la respuestasera a menudo constante.
0 20 40 60 80−1
0
1
Time t [sec]
Inputu
(a) Input
0 20 40 60 80−0.1
0
0.1
Transient Steady State
Time t [sec]
Outputy
(b) Output
Figura 2.4 Respuesta transiente versus respuesta en estado estacionario.

24 2 Sistemas Lineales
Respuesta al escalon unitario
La funcion escalon unitario esta definida como:
u= S(t) =
{0 t = 0,1 t > 0,
y representa un cambio abrupto de un valor a otro valor.La respuesta a un escalon unitario del sistema (2.5) esta definido como la saliday(t) comenzando de las condiciones
iniciales cero (o el punto de equilibrio apropiado) y dada una entrada del tipo escalon. Calculando la respuesta a unescalon unitario de un sistema lineal usando la ecuacion convolucion, parax(0) = 0, tenemos:
y(t) =∫ t
0CeA(t−τ)Bu(τ)dτ +Du(t) =C
∫ t
0eA(t−τ)Bdτ +D
=C∫ t
0eAσ Bdσ +D = C(A−1eAσ B)
∣∣σ=tσ=0+D
=CA−1eAtB−CA−1B+D.
(2.24)
Luego, reescribiendo la solucion tenemos:
y(t) =CA−1eAtB︸ ︷︷ ︸
transiente
+ D−CA−1B︸ ︷︷ ︸
estado estacionario
. (2.25)
El primer termino es la respuesta transiente que decae a cero a medida que t → ∞. El segundo termino es la respuestaal estado estacionario y representa el valor de la salida para despues de transcurrido un tiempo grande.
Respuesta a una entrada senoidal. Respuesta en la frecuencia
Una senal de entrada comun es del tipo senoidal (o combinacion de senos). La respuesta en la frecuencia de unsistema de entrada/salida mide la forma en la que el sistema responde a una excitacion senoidal. Dado que la solucionasociada a una excitacion senoidal es a su vez un senoide a la misma frecuencia, luegonos limitamos a comparar lamagnitud y la fase de la salida senoidal.
Evaluando al ecuacion convolucion (2.19) parau= cosωt. En particular notando que:
cosωt =12(eiωt +e−iωt).
Dado que el sistema es lineal, es suficiente calcular la respuesta del sistema a una entrada compleja de la formau(t) = est y luego podemos reconstruir la salida a un senoide mediante el promedio de las respuestas correspondienteas= iωt y s=−iωt.
Aplicando la ecuacion convolucion a la entradau= est tenemos:
y(t) =CeAtx(0)+∫ t
0CeA(t−τ)Besτdτ +Dest
=CeAtx(0)+CeAt∫ t
0Ce(sI−A)τBdτ +Dest
(2.26)
Asumiendo que ninguno de los autovectores deA es igual as= ±iω, luego la matrizsI−A es invertible y podemosescribir:
y(t) =CeAtx(0)+ CeAt(
(sI−A)−1e(sI−A)τB)∣∣∣
t
0+Dest
=CeAtx(0)+CeAt(sI−A)−1(
e(sI−A)t − I)
B+Dest
=CeAtx(0)+C(sI−A)−1estB−CeAt(sI−A)−1B+Dest,
(2.27)
y obtenemos:

2.4 Polos, ceros y ganancia 25
y(t) =CeAt (x(0)− (sI−A)−1B)
︸ ︷︷ ︸
transiente
+(C(sI−A)−1B+D
)est
︸ ︷︷ ︸
estado estacionario
, (2.28)
Nuevamente tenemos una solucion que consiste de un componente transiente y uno estado estacionario. El componentetransiente decae a cero si el sistema es asintoticamente estable y el componente estado estacionario es proporcional ala entrada (compleja)u= est.
La respuesta en estado estacionario se puede reescribir como:
yss(t) = Meiθ est = Mest+iθ ,
donde:Meiθ =C(sI−A)−1B+D, (2.29)
con M y θ representando la magnitud y la fase de un numero complejoC(sI−A)−1B+D. El numero complejoC(sI−A)−1B+D se denominafuncion de transferencia. Cuandons= iω, decimos queM es la ganancia yθ es lafase del sistema para cierta frecuencia de excitacion ω. Usando linealidad y combinando las soluciones des=+iω ys=−iω, podemos mostrar que si tenemos una entradau= Ausin(ωt +ψ) y una saliday= Aysin(ωt +ϕ), entonces:
ganancia(ω) =Ay
Au= M, fase(ω) = ϕ −ψ = θ .
La solucion en estado estacionario para un senoideu= cosωt esta dada por:
yss(t) = Mcos(ωt +θ),
como presentado en la Fig. 2.5. Si la faseθ es positiva se dice la salida esta adelantada a la entrada, de otra formadecimos que la salida esta atrasada a la entrada.
0 5 10 15 20−2
−1
0
1
2
Time [sec]
Input, output
∆T
T
Input Output
Au
Ay
(a) Input/output response
10−3
10−1
101
Gain
0.5 5−270
−180
−90
0
Phase [deg]
Frequency [rad/s]
(b) Frequency response
Figura 2.5 Respuesta de un sistema lineal a un senoide. a) Respuesta entrada/salida. b) Respuesta en frecuencia.
Una propiedad de la respuesta en frecuencia es que la ganancia del sistema cuandoω = 0 se denominaganancia enla frecuencia ceroy corresponde a la relacion entre una entrada constante y la salida estacionaria:
Mo =−CA−1B+D.
En Ingenierıa Electrica la ganancia de frecuencia cero es denominadaDC gain.
2.4. Polos, ceros y ganancia
La funcion de transferenciaG(s) = C(sI−A)−1B+D tiene interpretaciones muyutiles y sus caracterısticas son amenudo asociadas a propiedades importantes del sistema. Tres de las caracterısticas mas importantes son la gananciay la ubicacion de polos y ceros.

26 2 Sistemas Lineales
La ganancia en la frecuencia cero(o ganancia DC) esta dada por la magnitud de la funcion de transferencia ens= 0.Representa la relacion del estado estacionario a la salida del sistema con respecto a una entrada del tipo escalon (quepuede ser representado poru= est cons= 0). Para una representacion de espacio de estados, calculamos la gananciaen la frecuencia cero usando la siguiente ecuacion:
G(0) =−CA−1B+D. (2.30)
Para un sistema escrito como una ecuacion diferencial lineal:
dnydtn
+a1dn−1ydtn−1 + ...+any= bo
dmudtm
+b1dm−1udtm−1 + ...+bmu,
si asumimos que la entrada y la salida del sistema (en estado estacionario) son constantesyo y uo, luego encontramosqueanyo = bmuo. Luego la ganancia en la frecuencia cero es:
G(0) =yo
uo=
bm
an. (2.31)
Considerando el sistema lineal con la siguiente funcion de transferencia racional:
G(s) =b(s)a(s)
. (2.32)
las raices del polinomioa(s) son llamadospolosdel sistema, y las raices del polinomiob(s) son llamados loscerosdelsistema. Si los polos del sistema pertenecen al semiplano complejo izquierdo abierto (Co
−) se dice que la funcion detransferencia esestable. Si los ceros del sistema pertenecen al semiplano complejo izquierdo abierto (Co
−) se dice queel sistema es defase mınima, en caso contrario los ceros son defase no mınima2.
Para un sistema espacio de estados con funcion de transferenciaG(s) =C(sI−A)−1B+D, los polos de la funcionde transferencia son los autovalores de la matriz dinamicaA (sistema conrealizacion mınima). Una forma de ver estoes notando que el valor deG(s) tiende a infinito cuandoses un autovalor de la matriz dinamica del sistema puesto ques es precisamente el conjunto de puntos donde el polinomio caracterısticoλ (s) = det(sI−A) = 0 (y luego(sI−A) noes invertible). Se puede destacar que los polos del sistema en la forma de espacio de estados solo depende de la matrizA, que representa la dinamica intrınseca del sistema. Decimos que una funcion de transferencia es establesi todos suspolos tienen parte real negativa.
Para encontrar los ceros de un sistema en la forma de espacio de estados, observamos que los ceros son numeroscomplejoss tal que la entradau(t) = uoest resulta en salida igual a cero. Insertando una respuesta puramente exponen-cial x(t) = xoest y y(t) = 0 en:
x= Ax+Bu, y=Cx+Du,
resulta:sestxo = Axoest+Buoest, 0=Cestxo+Destuo
que puede ser escrito como:[−sI+A B
C D
][xo
uo
]
= 0. (2.33)
Esta ecuacion tiene una solucion conxo 6= 0, uo 6= 0 solo si la matriz a la izquierda no tiene rango completo. Loscerosdel sistema (llamados tambienceros de transmision, en caso de una realizacion mınima) son entonces aquellos valoresdes tal que la matriz.
[−sI+A B
C D
]
, (2.34)
pierde rango o det
([−sI+A B
C D
])
=0.
Siendo que los ceros dependen deA, B, C y D, ellos dependen de como las entradas y salidas son acopladascon losestados. Notese que en particular si la matrizB tiene rango completo, luego la matriz en (2.34) tienen filas linealmente
2 Por ejemplo, el sistemag(s) = −s+as+a con cero en el semiplano derecho ens= a tiene una ganancia constante de 1, pero su fase es
−2arctan(ω/a) rad y no 0 rad como serıa para el sistema de fase mınimag(s) = 1 con ganancia similar.

2.5 Otros 27
independientes para todos los valores des. Similarmente hayn columnas linealmente independientes si la matrizCtiene rango completo. Eso significa que los sistemas dondeB y C son de rango completo no tienen ceros. En particularesto significa que un sistema no tiene ceros si es totalmente posible actuar enel (cada estado puede ser controladoindependientemente) o si todos los estados son medidos. Para cuando consideramos sistemas sin igual numero deentradas y salidas, el calculo de los ceros usando (2.34) se hace inadecuado. Para este caso se trabaja directamente conla matriz de funciones de transferencia, como descrito a continuacion.
POR COMPLETAR
2.5. Otros
Ancho de bandaEl concepto de ancho de banda es importante en el entendimiento de los beneficios y desventajas alaplicar control por realimentacion. El ancho de banda esta relacionado a la velocidad de respuesta. En general, un anchode banda grande corresponde a un tiempo de levantamiento pequeno, esto debido a que las senales de alta frecuenciason pasadas mas facilmente hacia las salidas. Un ancho de banda grande tambien indica que el sistema es mas sensibleal ruido y a las perturbaciones parametricas. Por otro lado, si el ancho de banda es pequeno, el tiempo de respuestasera por lo general grande, y el sistema usualmente sera mas robusto.
POR COMPLETAR
Fuente: Capıtulos 5 y 8 del libroFeedback Systems: An Introduction for Scientists and Engineers, de Karl J.Astromy Richard M. Murray (2008).
Fuente: Capıtulo 4 del libroMultivariable Feedback Controlde S. Skogestad y I. Postlethwaite (2006).






























