Embed Size (px)
Citation preview

Nonlinear State EstimationParticle, Sigma-Points Filters
Robert Stengel Optimal Control and Estimation, MAE 546
Princeton University, 2018
Copyright 2018 by Robert Stengel. All rights reserved. For educational use only.http://www.princeton.edu/~stengel/MAE546.html
http://www.princeton.edu/~stengel/OptConEst.html
! Particle filter! Sigma-Points (“Unscented
Kalman”) filter! Transformation of uncertainty! Propagation of mean and
variance! Helicopter, HIV state
estimation examples! Additional nonlinear filters
1
Criticisms of the Basic Extended Kalman Filter*
*Julier and Uhlmann, 1997; Wan and van der Merwe, 2001
• State estimate prediction is deterministic, i.e., not based on an expectation – (Not true; the state estimate is the expectation of the
mean)• State estimate update is linear (unless it is quasi-
linear, iterated, or adapted)• Jacobians must be evaluated to calculate
covariance prediction and update
2

Transformation of Uncertainty
The transformation is said to be “unscented”*if its probability distribution is
Consistent, Efficient, and Unbiased
Estimate of the mean and covariance of the transformation’s output
y = f x[ ]where
x is a random variable with mean, x, and covariance, Pxx
y x,Pxx( ) and Pyy x,Pxx( )
Nonlinear transformation of a random variable
Julier and Uhlmann, 1997 3
Consistent Estimate of a Dynamic State
Consistent state estimate converges in the limitPxk+1xk+1
−E xk+1 − xk+1( ) xk+1 − xk+1( )T⎡⎣
⎤⎦{ }≥ 0
Estimated Covariance – Actual Covariance{ }≥ 0
Let xk ! x, xk+1 ! y
Lesson: In filtering, add sufficient “process noise” to the filter gain computation to
prevent filter divergence
xk+1 xk ,Pxkxk( ) = y x,Pxx( )
Pxk+1xk+1 xk ,Pxkxk( ) = Pyy x,Pxx( )
4

Adding Process Noise Improves
Consistency• Satellite orbit
determination– Aerodynamic drag
produced unmodeled bias
– Optimal filter did not estimate bias
• Process noise increased for filter design– Divergence is contained
Fitzgerald, 1971 5
Filter’s estimate of RMS state error
Actual state estimate error
Filter’s estimate of RMS state error
Actual state estimate error
Efficient and Unbiased Estimate of a Dynamic State
minAdded Process Noise
Estimated Covariance – Actual Covariance{ }
xk+1 = E xk+1( )Estimated Mean = Actual Mean
Efficient state estimator converges more quickly than an inefficient estimator
Unbiased estimate
Add “just enough” process noise
6

Empirical Determination of a Probability Distribution
! Monte Carlo evaluation! Propagate random noise through nonlinearity
for given prior distribution (e.g., Gaussian)! Generate histogram of output
! N trials) of nonlinear system propagation! Histogram as numerical representation of distribution,
or! Functional minimization to identify associated
theoretical distribution
7
! Particle Filter ! Propagate many points to estimate mean and
standard deviation! As N –> ∞, estimate error –> 0
x =xi
i=1
N
∑N
! Sample variance for same data set σ x
2 =xi − x( )2
i=1
N
∑N −1( )
! Sample mean for N data points, x1, x2, ..., xN
Empirical Determination of Mean and Variance
8
! Sigma Points Filter: ! Propagate limited number of points
using nonlinear model to estimate mean and covariance

Sigma Points of Pxx and Mean2-D Example
Elliptical One-Sigma Contour
9
! Mean is center of ellipse! Sigma points are ± major and
minor axes of ellipse
Sigma Points of Pxx and E(x)
3-D Example
10
! Mean is center of ellipsoid! Sigma points are ± extremes
of ellipsoid axes

Sigma Points of Estimate Uncertainty, Pxx
State covariance matrixPxx : Symmetric, positive-definite covariance matrix
Eigenvalues are real and positive
sIn − Pxx = s − λ1( ) s − λ2( ) s − λn( )Eigenvectors
λiIn − Pxx( )αei = 0, i = 1,n
11
Modal matrix (not expected value symbol)
E = e1 e2 ! en⎡
⎣⎤⎦
Sigma Points of PxxDiagonalized covariance matrixEigenvalues are the Variances
1) Principal axes of the covariance matrix are defined by modal matrix, E
2) Location of 2n one-sigma points in state space given by
±Δx σ1( ) ±Δx σ 2( ) ±Δx σ n( )⎡⎣⎢
⎤⎦⎥ = E
±σ1 0 00 ±σ 2 0 0 0 ±σ n
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
Λ = E−1PxxE = ETPxxE =
λ1 0 00 λ2 0 0 0 λn
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
=
σ12 0 0
0 σ 22 0
0 0 σ n
2
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥
12

Propagation of the Mean Value and Covariance Matrix
13
Propagation of the Mean Value and the Sigma Points
! Mean value at tk
! Sigma points (relative to mean value)
σ ik!
xk −Δxk σ i( ), i =1,n
xk +Δxk σ i( ), i = n+1( ),2n
⎧⎨⎪
⎩⎪
x tk( ) = xk
xk+1 = xk + f x t( ), u t( ),w t( ),t⎡⎣ ⎤⎦dttk
tk+1
∫
σ ik+1 = σ ik + f σ i t( ), u t( ),w t( ),t⎡⎣ ⎤⎦dttk
tk+1
∫ , i =1,2n
Projection from the prior mean
Nonlinear projection from each prior sigma point
14

Estimation of the Propagated Mean Value
• Assumptions:• To 2nd order, the propagated probability distribution is
symmetric about its mean• New mean is estimated as average or weighted average of
projected points (arbitrary choice by user)
xk+1 =xk+1 + σ ik+1
i=1
2n
∑2n +1
xk+1 =xk+1 + ξ σ ik+1
i=1
2n
∑2ξn +1
Ensemble Average for the Mean Value
Weighted Ensemble Average for the Mean Value
15
Projected Covariance Matrix
Pxk+1xk+1 =
12n +1( )−1 xk+1 − xk+1( ) xk+1 − xk+1( )T + σ ik+1
− xk+1( ) σ ik+1− xk+1( )T
i=1
2n
∑⎧⎨⎩
⎫⎬⎭
Unbiased ensemble estimate of the covariance matrix
This estimate neglects effects of disturbance uncertainty during the state propagation from tk to tk+1
16
Does not require calculation of Jacobian matricesDoes require calculation of nonlinear integrals

Sigma Points of Disturbance Uncertainty, Q
Q : s × s( ) Symmetric, positive-definite covariance matrix
sIs −Q = s − λ1( ) s − λ2( ) s − λs( ) [s = Laplace operator]
λiIs −Q( )αei = 0, i = 1, s
EQ = e1 e2 es⎡⎣
⎤⎦Q
ΛQ = EQTQEQ =
λ1 0 ! 00 λ2 ! 0! ! ! !0 0 ! λs
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥Q
=
σ 12 0 ! 0
0 σ 22 ! 0
! ! ! !0 0 ! σ s
2
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥Q
! Eigenvalues! Modal Matrix! Transformation
17
±Δw σ 1( ) ±Δw σ 2( ) ! ±Δw σ s( )⎡⎣⎢
⎤⎦⎥ = EQ
±σ 1 0 ! 00 ±σ 2 ! 0! ! ! !0 0 ! ±σ s
⎡
⎣
⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥Q
Propagation of the Disturbed Mean Value
Sigma points of disturbance (relative to mean value)
ω ik
wk + Δwk σ i( ), i = 1, s
wk − Δwk σ i( ), i = s +1( ),2s⎧⎨⎪
⎩⎪
xω i( )k+1
= xk + f x t( ),u t( ),ω i t( ),t⎡⎣ ⎤⎦dttk
tk+1
∫ , i = 1,2s
Incorporation of effects of disturbance uncertainty on state propagation
18Calculation of nonlinear integrals

Estimation of the Propagated Mean Value with Disturbance Uncertainty
Estimate now includes effect of disturbance uncertaintyEstimate of the mean is the average or weighted average of
projected points
xk+1 =xk+1 + σ ik+1
i=1
2n
∑ + xω i( )k+1
i=1
2s
∑2 n + s( ) +1
xk+1 =xk+1 + ξ σ ik+1
i=1
2n
∑ + xω i( )k+1
i=1
2s
∑⎡⎣⎢
⎤⎦⎥
2ξ n + s( ) +1
Ensemble Average for the Mean Value
Weighted Ensemble Average for the Mean Value
19
Covariance Propagation with Disturbance Uncertainty
Pxk+1xk+1 =1
2 n + s( ) +1⎡⎣ ⎤⎦ −1Pmean + Psigma + Pdisturbance( )
Unbiased sampled estimate of the covariance matrix
Pmean = xk+1 − xk+1( ) xk+1 − xk+1( )T
Psigma = σ ik+1− xk+1( ) σ ik+1
− xk+1( )Ti=1
2n
∑
Pdisturbance = xω i( )k+1
− xk+1⎡⎣
⎤⎦ xω i( )
k+1− xk+1⎡
⎣⎤⎦T
i=1
2s
∑20

Sigma-Points (“Unscented Kalman”)
Filter
21
System Vector Notation
v xwn
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
dim v( ) = n + r + s( )×1
v0 =x0w0
n0
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥= E
x0w0
n0
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥ χ0 =
χ0x
χ0w
χ0n
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
χk+1x = χk
x + f χx t( ),u t( ),χw t( ),t⎡⎣ ⎤⎦dttk
tk+1
∫
ψ = h χx ,χn( )
System vector Expected value of system vector
Measurement vector, corrupted by noise
Propagation of the mean
Analogous to z t( ) = Hx t( ) + n t( )22

Matrix Array of System and Sigma-Point Vectors
Χ χ0 χ1 χ2L⎡
⎣⎤⎦; dim Χ( ) = L × 2L +1( )
χ0 = v0 =x0w0
n0
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥; dim χ0( ) = n + r + s( )×1 L ×1
χi =v i + ξ S( )i , i = 1,L
v i −ξ S( )i , i = L +1,2L
⎧⎨⎪
⎩⎪
⎫⎬⎪
⎭⎪; dim χi( ) = 2L ×1
S : Square root of P; S( )i ith column of S
Weighted sigma points for system vector
Matrix of mean and sigma-point vectors
Expected value of system vector
23
Initialize FilterState and covariance estimates
xo = E x 0( )⎡⎣ ⎤⎦ = χx 0( )
Px 0( ) = E x 0( )− x 0( )⎡⎣ ⎤⎦ x 0( )− x 0( )⎡⎣ ⎤⎦T{ }
Pv 0( ) = E v 0( )− v 0( )⎡⎣ ⎤⎦ v 0( )− v 0( )⎡⎣ ⎤⎦T{ }
=
Px 0( ) 0 0
0 Qw 0( ) 0
0 0 Rn 0( )
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
Covariance matrix of system vector
24

Propagate State Mean and Covariance
xk+1 −( ) = ηi χixk+1
i=0
2L
∑
χix( )k+1 = χi
x( )k + f χix( ) t( ),u t( ), χi
w( ) t( ),t⎡⎣ ⎤⎦dttk
tk+1
∫
Incorporate disturbance sigma points
Ensemble average estimates of mean and covarianceηi : Weighting factor
Typically
ηi =1 L +1( ), i = 0
1 2 L +1( ), i = 1,2L
⎧⎨⎪
⎩⎪
25after Wan and van der Merwe, 2001
Pk+1x −( ) = ηi χi
x −( )− x −( )⎡⎣ ⎤⎦k+1 χix −( )− x −( )⎡⎣ ⎤⎦k+1
T{ }i=0
2L
∑
Incorporate Measurement Error in Output
ψ i( )k+1 = h χix( )k+1 , χi
n( )k+1⎡⎣ ⎤⎦, i = 0,2L
yk+1 −( ) = ηi ψ i k+1i=0
2L
∑
Mean/sigma-point projections of measurement
Weighted estimate of measurement projection
26

Incorporate Measurement Error in Covariance
Prior estimate of measurement covariance
Prior estimate of state/measurement cross-covariance
27after Wan and van der Merwe, 2001
Pk+1y −( ) = ηi ψ i −( )− y −( )⎡⎣ ⎤⎦k+1 ψ i −( )− y −( )⎡⎣ ⎤⎦k+1
T{ }i=0
2L
∑
Pk+1xy −( ) = ηi χi
x −( )− x −( )⎡⎣ ⎤⎦k+1 ψ i −( )− y −( )⎡⎣ ⎤⎦k+1T{ }
i=0
2L
∑
Compute Kalman Filter Gain
Kk+1 = Pk+1xy −( ) Pk+1y −( )⎡⎣ ⎤⎦
−1
Original formula (eq. 3, Lecture 18)
Kk = Pk −( )HkT HkPk −( )Hk
T + Rk⎡⎣ ⎤⎦−1
Sigma points version w/index change
28

Post-Measurement State and Covariance Estimate
xk+1 +( ) = xk+1 −( ) +Kk+1 zk+1 − yk+1 −( )⎡⎣ ⎤⎦
Pk+1x +( ) = Pk+1x −( ) −Kk+1Pk+1
y −( )Kk+1T
State estimate update
Covariance estimate “update”
29
30
Example: Simulated Helicopter UAV Flightvan der Werwe and Wan, 2004

Comparison of Pitch, Roll, and Yaw Errors
31
Comparison of RMS Errors for EKF, UKF, and Gauss-Hermite Filter (GHF)
32Banks et al, A COMPARISON OF NONLINEAR FILTERING APPROACHESIN THE CONTEXT OF AN HIV MODEL, 2010
CD4+ Cells
HIV Virions
Effector Cells
EKF UKF GHF
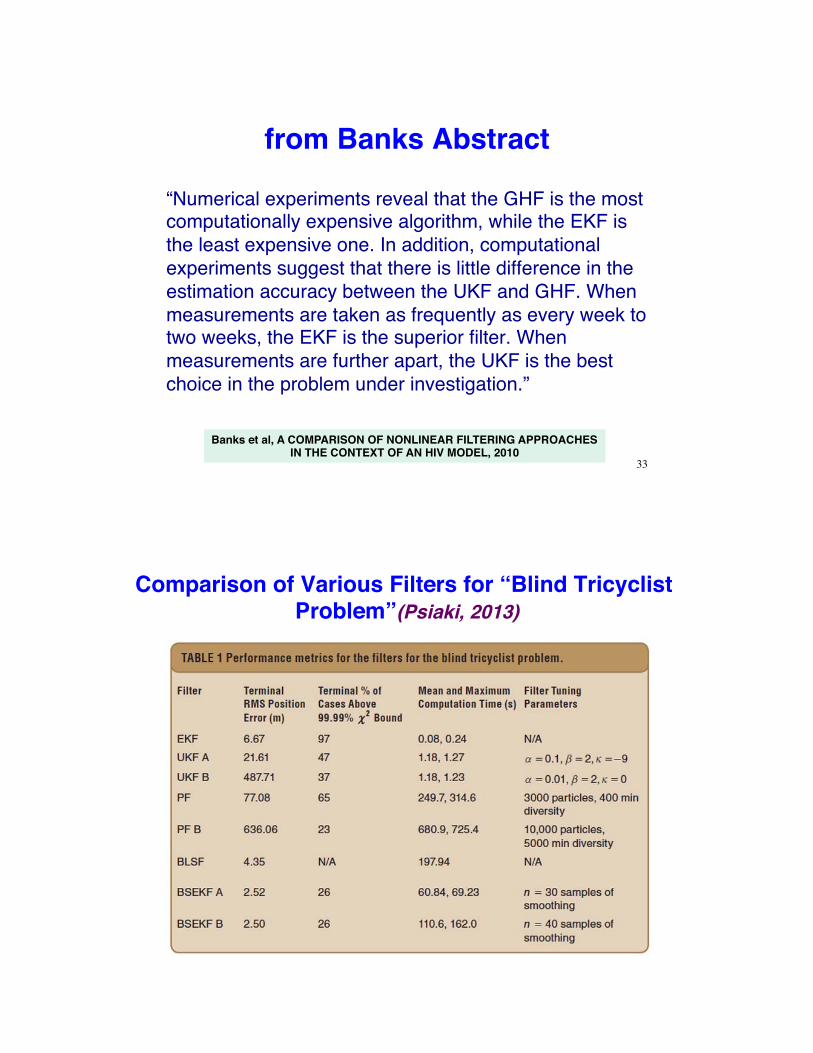
from Banks Abstract
“Numerical experiments reveal that the GHF is the most computationally expensive algorithm, while the EKF is the least expensive one. In addition, computational experiments suggest that there is little difference in the estimation accuracy between the UKF and GHF. When measurements are taken as frequently as every week to two weeks, the EKF is the superior filter. When measurements are further apart, the UKF is the best choice in the problem under investigation.”
33
Banks et al, A COMPARISON OF NONLINEAR FILTERING APPROACHESIN THE CONTEXT OF AN HIV MODEL, 2010
Comparison of Various Filters for “Blind Tricyclist Problem”(Psiaki, 2013)
34

Comparison of Various Filters for “Blind Tricyclist Problem”(Psiaki, 2013)
35
Definitions
36
! EKF: Extended Kalman filter• UKF: Unscented Kalman (Sigma-
Points) filter• GHF: Gauss-Hermite filter*• PF: Particle filter• BLSF: Batch least-squares filter• BSEKF: Backward-smoothing EKF
* See https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=6838186 https://en.wikipedia.org/wiki/Gauss–Hermite_quadrature

Observations! Jacobians vs. no Jacobians! Number of nonlinear propagation steps! Gaussian vs. approximate non-Gaussian
distributions! Best choice of averaging weights is problem-
dependent! Comparison of filters is problem-dependent
! Are these filters better than a quasi-linear filter? (TBD)
37
More on Nonlinear Estimators! Gordon, N., Salmond,D., and Smith, A. “Novel Approach to
Nonlinear/Non-Gaussian Bayesian State Estimation,” IEE Proc.-F, (140(2), Apr 1993, pp. 107-113.
! Banks, H., Hu, S., Kenz, Z., and Tran, H., “A Comparison of Nonlinear Filtering Approaches in the Context of an HIV Model,” Math. Biosci. Eng., 7 (2), Apr 2010, pp. 213-236.
! Psiaki, M., “Backward-Smoothing Extended Kalman Filter,” Journal of Guidance, Control, and Dynamics, 28 (5), Sep 2005, pp. 885-894.
! Psiaki, M., “The Blind Tricyclist Problem and a Comparison of Nonlinear Filters,” IEEE Control Systems Magazine, June 2013, pp. 48-54.
! Psiaki, M., Schoenberg, J., and Miller, I., “Gaussian Sum Reapproximation for Use in a Nonlinear Filter, Journal of Guidance, Control, and Dynamics, 38 (2), Feb 2015, pp. 292-303.
38

Next Time:Adaptive State Estimation
39




























