Embed Size (px)
Citation preview

IEEE SENSORS JOURNAL, VOL. 8, NO. 8, AUGUST 2008 1389
Networked Sensors for Cargo ScreeningRick Picard and Tom Burr
Abstract—Sensors to monitor cargo are currently operatedin standalone mode because of cost considerations, operationalsimplicity, and because potential benefits to having sensors shareinformation do not appear to have been seriously considered inmany cases. To identify situations where threat detection benefitsoffset networking costs (and where they do not), we describe anumerical algorithm for approximating the multidimensional in-tegrals defining the false positive rates and detection probabilitiesfor networked systems. The algorithm is sufficiently fast computa-tionally to embed in optimization routines that search over sensorspace (e.g., how to best augment an existing sensor network), aswell as over threshold space (i.e., how to best determine alarmthresholds for the sensors) for both standalone and networkedsensors. Results are applied to detection of elevated gamma andneutron counts. Circumstances under which networking is usefulare characterized.
Index Terms—Multidimensional integrals, network optimiza-tion, numerical approximations.
I. INTRODUCTION
N ETWORKED sensors can share detailed measurement in-formation, unlike the standalone sensors that are currently
used for cargo screening. In some cases, networked systemssubstantially improve threat detection by better using all avail-able measurement information. The networking of sensors isnot free, of course, and requires tracking individual objects (ve-hicles, containers, etc.), as well as establishing communicationlinks between sensors. Thus, cost-benefit tradeoffs enter any de-cision as to whether sensors should be networked.
We describe a numerical algorithm and assess its accuracyfor various data distributional assumptions, and compare opti-mized standalone and optimized networked systems. False pos-itive rates and detection probabilities (DPs) involve the eval-uation of multidimensional integrals. Standard approaches tothis evaluation are numerical integration and stochastic simu-lation, both of which are too slow computationally to embedin optimization algorithms. Search spaces related to optimiza-tion can be large and include candidate sensing techniques (e.g.,which sensors should be included in a network?), inspectionprotocol (e.g., how should the sensors be configured within thenetwork?), alarm thresholds for the sensors (to control networkperformance), and possibly other factors (e.g., if it is not prac-tical to screen all containers at all sensing locations, what sam-pling plans are best?).
Optimization for standalone sensors, as in [1], for example,is nontrivial. Using the algorithm described herein, optimizationfor networked sensors becomes practical.
Manuscript received November 2, 2007; accepted January 7, 2008. PublishedJuly 16, 2008 (projected). The associate editor coordinating the review of thispaper and approving it for publication was Prof. Georgios Papadimitriou.
The authors are with the Statistics Group of the Los Alamos National Labora-tory, Los Alamos, NM 87545 USA (e-mail: [email protected]; [email protected]).
Digital Object Identifier 10.1109/JSEN.2008.917474
In the next section, we formalize the screening problem forGaussian measurements. Integral approximations for networkedsensors are given in Section III, and illustrated in Section IV.In Section V, the algorithm is extended to correlated sensors,whether networked or standalone, to non-Gaussian data, and tononbinary routing (e.g., using high/medium/low results to routecontainers among three output destinations, as opposed to usingpass/fail sensor results to route containers among two outputdestinations). Concluding remarks appear in Section VI.
II. BACKGROUND AND NOTATION
Suppose that a container has reached a sensor and has beenmeasured. Let denote the number of sensors that have mea-sured the container, including the most recent measurement thathas “just” been made. For the th sensor measurement, where
, the measured value is obtained that has mean, and standard deviation . Note that and depend on
the sensor type, on the actual cargo, and—for radiation measure-ments—on the measurement environment and counting time. Inaddition, certain applications involving multichannel analyzersthat convert multivariate signatures to one-dimensional quanti-ties may lead to other applications of this work.
As a starting point, suppose that is a background-cor-rected count rate, so that for nonradioactive containers,and that is Gaussian distributed. Later, in Section V, we con-sider non-Gaussian data.
For accurately declared cargo, the quantity
from the th sensor behaves like a standardized Gaussian. Notethat the use of the container-type-specific means and standarddeviations has the potential to improve screening. False decla-ration of cargo type can indicate attempts to avoid taxes or totransport certain contraband. Further, when cargo type is nottaken into account, common NORMs (naturally occurring ra-dioactive materials), including fertilizer, ceramics, and cat litter,emit signals that create nuisance alarms and consume the timeof inspection personnel [2].
For simplicity, it is assumed that threat containers and unde-clared NORM give measured values that are at least as large asthe measured values for nonradioactive cargo, on the average. Inother words, interest lies in a “one-sided” evaluation, where onlymeasured values that are too large generate a “fail” outcome.Also, for simplicity, it is assumed that measurements from thesensors are statistically independent, although the results hereare easily extended to correlated cases; see Section V.
There are several reasonable options for combining data fromsensors and for determining alarm rules. In what follows, wecombine the data from the sensors using
1530-437X/$25.00 © 2008 IEEE

1390 IEEE SENSORS JOURNAL, VOL. 8, NO. 8, AUGUST 2008
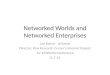
Fig. 1. Simple three sensor network.
When the cargo type declaration is accurate, is Gaussian,with mean zero; for threat items and undeclared NORM,tends to be large.[Note. The quantity , though easy to understand andcompute, is not theoretically optimal for identifying threatcontainers. In a sense, weights the th sensor relative toits precision for the declared container type, even thoughthe ability to detect a particular threat also depends on thedifference between mean values for the threat and declaredcontainer types. Alternate approaches to detection, such asthe likelihood ratio test [3], perform slightly better than .Those approaches, unfortunately, involve esoteric test statisticsand do not allow for practical computation when embedded inoptimizations. Thus, we assess system performance based onthe use of . It is likely, and can be confirmed via simulation,that the performance of the same system based on a sequentiallikelihood ratio test is very similar.]
Consider the networked system displayed in Fig. 1. A con-tainer is evaluated by the first sensor and, if the standardizedquantity exceeds a threshold , thecontainer “fails” and is sent to a second sensor. Otherwise, thecontainer “passes” and is released from screening. At the secondsensor, the measurement is made, and if
exceeds a threshold , then the container “fails” and issent to a third sensor. At the the third sensor, a measurement
is obtained and if
exceeds a threshold , then the container is unloaded andthoroughly inspected.
Inspection regimes such as displayed in Fig. 1 are typical.The philosophy is to minimize costs by subjecting only the mostsuspicious cargo to the more expensive measurements.
III. INTEGRAL APPROXIMATIONS
A. False Positive Probabilities
For the three-sensor system, the false positive probability isnontrivial to compute. That probability is
One approach to computing this probability involves numericalintegration. When multiple sensors are involved, numerical in-tegration is a factor-of-1000-or-more slower than the algorithmto follow (Section V), and is impractical for use in network opti-mization routines. Another alternative is importance sampling,which is also impractical.
Fast and accurate approximations to probabilities such asand are developed in what follows
and combined, using Venn diagram arguments, to give pathprobabilities for networks. For example, the probability that acontainer “fails” the first sensor and “passes” the second is
In a similar vein, “either or” systems, which alarm when at leastone sensor alarms, are addressed using probabilistic identitiesof the form
though care must be taken to control overall alarm rates for“either or” systems.
Suppose the cargo declaration is accurate. The false positiveprobability at the first sensor is
“ ”
where is the decision threshold for the sensor,and is the cumulative distribution function for the standardGaussian, evaluated via an function call (e.g., [4]).
Next, consider the second sensor. When the container decla-ration is correct, the random vector is bivariateGaussian, with means of and equal to zero and stan-dard deviations equal to one. The correlation between and
, which arises because and both depend on the sensormeasurement , is .
The conditional distribution of given that exceeds thethreshold has mean equal to [5]

PICARD AND BURR: NETWORKED SENSORS FOR CARGO SCREENING 1391
where , and standard deviation
where and the function is
The distribution of given that is not Gaussian,but the approximation to the probability of interest is based onthe premise that tail areas of the distribution can be computed asif it were. Numerical evaluations have shown that this approxi-mation is accurate in other contexts (see Pandey [6] and [7] forsystem reliability applications), and we show in Section V thatit is also robust to non-Gaussian data.
Summarizing for the first two sensors (only)
“ ”
computable almost instantly using standard software. Now, con-sider the third sensor and
“ ”
(1)
where the first two terms in the last equation are taken from theabove result for two sensors. Derivation of the last approxima-tion is given in the Appendix.
B. Detection Probabilities (DPs)
DPs for the three-sensor system are computed along the linesof the above. Suppose the threat container is such that the firstsensor provides a Gaussian measured value with mean andstandard deviation , the second sensor provides a Gaussianmeasured value with mean and standard deviation , andthe third sensor provides a Gaussian measured value with mean
and standard deviation . Due to the one-sided nature of themonitoring, it is assumed that , and .
When the container type is falsely declared (presumably, thiswould always happen for a threat container), the quantity
based on the declared container type is Gaussianwith mean
and standard deviation . In what follows, thetilde notation “ ” distinguishes the sensor properties for theactual container type from those of the declared container type.When the declaration is correct, and .
The “fail” probability for the networked system at the firstsensor is the same as for the standalone system
where the transformed threshold value is
(2)
For a correct cargo declaration, and .Details behind the approximation for a “fail” at the first two
sensors are contained in the Appendix. The end result is
“ ”
(3)
where
(4)
and
For a correct cargo declaration, . In the case ofthree sensors, a Gaussian approximation to the joint distributionof and conditional on leads to the estimatedprobability
“ ”
(5)
where
and is derived in the Appendix.

1392 IEEE SENSORS JOURNAL, VOL. 8, NO. 8, AUGUST 2008
C. Extension to Correlated Sensors
It is straightforward to extend these results to the case of cor-related sensors. The correlations among the standardized quan-tities for statistically independent sensors are
When sensors are correlated, the values of the are al-tered. Once the correct correlations are determined using the in-tersensor correlations, and the are normalized, the resultshere apply to the correlated case. An example is given in thenext section.
IV. EXAMPLES
A. When Networking Sensors Does Not Pay
Networking sensors does not pay when the costs outweigh thebenefits. A simple example, taken from [8], involves a simplenetwork consisting of only two sensors, similar to Fig. 1. Acargo container is screened by the first sensor and, dependingon the resulting pass/fail determination, is either released (if it“passes”) or sent to the second sensor (if it “fails”). If the cargopasses the second, more sensitive sensor, it is released; if it failsat the second sensor, it is unloaded and carefully inspected.
The benefit of networking is that better decisions are usuallymade by “downstream” sensors because of the information gath-ered “upstream.” For standalone sensors, downstream sensorsknow only that upstream thresholds have been exceeded, but donot know whether the excesses are more consistent with falsepositives or with genuine threats. The inability of standalonesensors to use this information reduces DPs in many cases.
In the two-sensor example at hand, however, networking wasnot cost effective because:
1) only a small portion of containers ever reached Sensor 2;2) the quality of standalone decisions at Sensor 2 was reason-
ably good to begin with;3) costs of tracking individual containers and of net-
working sensors across different locations at the portwere non-negligible.
B. When Networking Does Pay
The simplistic two-sensor example points the way towardssituations where networking is cost-effective. Downstream de-cisions must be important, such as when information from sev-eral comparable sensors is combined to control false positiverates, and costs are reduced in cases where sensors are physi-cally co-located. To illustrate how networking can improve de-tection probability, consider an example involving three “sen-sors” that are co-located on a single portal monitor. The firstsensor involves a low-energy gamma count, the second sensorinvolves a high-energy count, and the third sensor involves alow-to-high energy count ratio, where all quantities are back-ground-corrected. Energy ratios are useful [9] in distinguishing
nuclear weapons material from common NORMs that generatenuisance signals for low- and high-energy counts alone.
Letting the low- and high-energy counts be denoted by and, respectively, and the ratio , we use data from a
screening location described in [10] to calculate the propagatedcorrelation matrix of in the primary screening as
In other words, there is a slight correlation between the back-ground-corrected low- and high-energy counts, and the correla-tions of those counts with the ratio have the anticipated signs.
Relating the quantities in this example to earlier notation,, and
. Upon incorporation of the above correlationsinto the for the , the probabilities that a container“passes” and “fails” the inspection can be approximated.
For this correlation structure, alarm thresholds were op-timized, subject to a 1% overall false positive rate, for thenetworked and non-networked systems, to detect a threatcontainer with expected responses covering a range of values.For example, suppose ; thatis, the expected low-energy count is 2 standard deviationsabove background, the expected high-energy count is 1 stan-dard deviation above background, and the expected ratio is 2standard deviations above background. In this case, taken fromthe “sweet spot” in the parameter space where networking isbeneficial, the DP is 74% for networked sensors, but only 60%for the same sensors operated in standalone mode.
Similar scenarios involving moderate signals (e.g., on theorder of , in cases where thresholds must be largeto control alarm rates) are also detected more frequently bynetworked sensors.
To be sure, there is a region in the parameter spacewhere networking sensors does not help. For example, for
, the DP is 43% fornetworked sensors and 77% for the same sensors operated instandalone mode. In this case, the first two sensors are almostworthless in detecting threats, and contribute noise to thedownstream assessment at the third sensor. Consequently, thissituation is not relevant to practical applications.
Another example helps differentiate among situations wherenetworking improves performance, and where it does not.
This example involves primary and secondary screening asdescribed in [10]. Primary screening uses four detector panels,with top-and-bottom panels on both sides of a vehicle. Eachpanel provides a low- and a high-energy gamma count, as well asa neutron count during a 10–60 s screening time. This primarysensor alarms when any of the 12 background-adjusted, stan-dardized counts exceeds a threshold. The secondary sensor issimilar to the primary sensor, except that care is taken to reducenuisance sources. For example, alarms in the primary can occurfrom “cross talk,” where a NORM-carrying container in a neigh-boring lane contributes to the count rate of a container of in-terest, or from a passenger in a vehicle who is receiving radioac-tive medical treatment. At the secondary, sources of potential

PICARD AND BURR: NETWORKED SENSORS FOR CARGO SCREENING 1393
cross talk are not allowed, passengers are removed from vehiclesbefore monitoring, and so on. Thus, the two sensors may “see”different signals, and response patterns can be complicated.
Currently, primary data are ignored in the secondaryscreening assessment. Therefore, at sensor , ifexceeds a threshold, then sensor alarms. We compared thestandalone DP to the networked DP for a grid from 0 to 3 insteps of 0.1 of the primary and secondary standardized means.
We found that if the standardized mean for the primary isroughly in the 0.8 to 3.0 range, and the standardized mean for thesecondary is moderate, in the 1.0–3.0 range, then the optimizednetworked DP is approximately 0.05–0.10 larger than the opti-mized standalone mode DP, for a fixed false alarm probabilityof 0.01. On the other hand, if the standardized mean for the pri-mary is small, approximately 0.7 or less, and the standardizedmean for the secondary is moderate, in the 1.2–3.0 range, thenDPs for the standalone evaluation are 0.05–0.10 higher. For therest of the parameter space, there was little absolute differencein DPs. Similar to the first example, standalone sensors are su-perior only when the first sensor is ineffective.
The primary/secondary example shows that networkingstandalone sensors can pay off for inspection of some con-tainers, but not for others. That the mean values andstandard deviations for various threats and NORMsdepend on a variety of factors, including geographic location,time of year, and detector efficiency, also makes it difficult toreach sweeping conclusions. Since the purpose of this sectionis to compare performance of standalone and networked sen-sors, we do not pursue other summaries, such as plotting DPsversus false/nuisance alarm rates; such values for real threats isprotected information, of course.
V. ADDITIONAL ISSUES
A. More Than Three Sensors
Results extend to multiple-sensor cases, where the accu-mulation of information increases, as do the advantages ofnetworking. For example, with five independent sensors anda threat item 1.5 standard deviations above each mean, thenetworked DP is 90%, while the standalone DP is 59% (bothwith a 1% false positive rate).
Recall that the road map for a three-sensor problem involves:a) beginning with the trivariate Gaussian distribution for
;b) transforming the quantities in Step a) by subtracting
their means and dividing by their standard deviations, toobtain standardized quantities ;
c) finding the correlations among the standardizedquantities and using them to approximate conditional dis-tribution of the last two normalized components given thatthe first standardized component exceeds its transformedthreshold;
d) applying the bivariate result to the distribution in Step c) toobtain the conditional moments of the second componentin the bivariate distribution given that the first componentof the bivariate distribution exceeds its threshold.
This road map applies to networks of more than three sensorsupon redefining the trivariate distribution in Step a).
Consider first the four-sensor case. The DP approximationinvolves the distribution of conditional on
. This distribution, defined in Step c) above, has mean
The corresponding covariance matrix had diagonal elementsand off-diagonal elements with structure as
indicated previously, i.e.,
At this point, the approximation proceeds exactly as did the DPfor the three-sensor problem, treating the trivariate distributionof conditional on with mean vector
and covariance matrix as if it were the uncondi-tional distribution of in Step a) of the three-sensorroad map.
As is apparent, the above methodology can be extended in-ductively to five or more sensors. The quality of the approxi-mation, however, tends to degrade as more and more sensorsare involved because the approximation errors accumulate eachtime a sensor is added. The situation is analogous to making aphotocopy of a photocopy of an original document: each suc-cessive copy loses some resolution from the previous one.
Yet another consideration is that the practical relevance of themultiple-sensor case to cargo screening is questionable. Unlesssensors are physically co-located, unacceptable time delays areinvolved in transporting containers among the sites of the mul-tiple sensors.
B. Nonbinary Routing
Since simplicity is valued in container routing, sensor outputtends to be of binary form: pass or fail, alarm or not. In somecases, other options are helpful. For example, if an initialgamma count of a container were ambiguous, a third optionof counting for a longer period of time could be considered.Sensors automatically incorporating this option have beensuccessfully used [11].
Similarly, consider a three-sensor network involving:1) an initial screening with Sensor 1 for radioactivity;2) a low-cost, somewhat more sensitive Sensor 2 for
radioactivity;3) a high-cost, Sensor 3 that utilizes the energy spectrum
of the radioactivity to identify the specific radioactivesource(s).
If Sensor 1 returns an ambiguous result, it may be useful to sendthe cargo to Sensor 2 for a better measurement. On the otherhand, if Sensor 1 measures radioactivity at many times the alarmlevel, there is little point in sending the cargo to Sensor 2. Thepresence of radioactivity is not in question, only the source(s) ofthe radiation, so the container should be sent directly to Sensor3 to save the cost of Sensor 2.
As is apparent, it is often possible to improve on systems thatroute containers using only binary routing. Integral approxima-tions described herein extend easily to such systems.

1394 IEEE SENSORS JOURNAL, VOL. 8, NO. 8, AUGUST 2008
C. Randomized Inspections
Randomized inspections preserve a deterrent effect and helpcontain surveillance costs. In the simplest case, each containerhas a specified probability of being monitored. Containers notmonitored would be released without inspection. More sophis-ticated versions of the concept also exist, where the inspectionprobability varies depending on the cargo type.
The performance of randomized inspections can be evaluatedupon combining the inspection probabilities for containers withthe DPs as computed in this paper.
D. Non-Gaussian Data
Quality of the integral approximations was assessed using ex-tensive simulations (100 000 runs per case) in the R statisticalprogramming language [14]. We examined networks having 3–5sensors, with false positive rates down to 0.001 per container,and DPs up to 0.95. Ratios of simulated-to-approximated prob-abilities typically ranged from 97% to 103% for purely Gaussiandata. Similar work for equicorrelation structures in system reli-ability [6], [7] showed comparably good agreement.
In addition, we examined moderately heavy tailed, non-Gaussian cases, reflective of certain inspection data. Thesecases include -distributions having 3–10 degrees of freedom,lognormals, and mixtures of Gaussians. Typical simulated-to-approximated probability ratios ranged from 90%–110%. Forthe example in Section IV having three correlated sensors,100 000 simulation runs again confirmed that the integralapproximations are highly accurate, with ratios of simulated-to-approximated probabilities ranging from 97% to 103% foran approximate probability ranging from nearly 0 to nearly 1.Also, for the “maximum of 12 sensors” example discussed inSection IV, another non-Gaussian case (the maximum of 12Gaussians is non-Gaussian), typical simulated-to-approximatedprobability ratios ranged from 90%–106%.
Using the real data in [10], reanalyzed here for present pur-poses, the empirical-to-approximated probability ratios rangedfrom 92% to 115% for the maximum of 12 values. In cases ofseverely non-Gaussian sensor data, it is anticipated that a datatransform would be applied prior to use of Gaussian-based for-mulae, and thus we conclude that the approximation accuracy isvery good across the spectrum of anticipated scenarios.
E. Run Time Comparison
Comparisons of run times (based on the system.time func-tion in R) for numerical integration of a multivariate Gaussian(using the adapt function for multivariate integration in R) andfor the approximate calculation described here indicate that theapproximation is 1000 to 10 000 times faster than numerical in-tegration, depending on the number of sensors (dimension ofthe Gaussian distribution). For example, for three uncorrelatedsensors, the cpu time is 0.0001 s for the fast approximation, and0.64 s for numerical integration.
VI. CONCLUSION
The integral approximations described are easy to computeand are useful in evaluating false positive and DPs for networkedsystems. Evaluations using real data, simulated Gaussian data,
and simulated non-Gaussian data indicate that the approxima-tions are robust across a wide variety of cargo screening envi-ronments. Although the examples presented focused on radia-tion monitoring and alarms triggered only by measured valuesthat are too large, the results apply to more general screeningproblems.
Due to the speed, accuracy, and robustness of the approximatecalculation, the approximation is useful for practical system de-sign and to evaluate the potential benefits (or lack thereof) in net-working a set of sensors, as in the examples presented. Systemoptimization, e.g., as described in [1] for standalone systems,can be pursued for networked systems, for establishing alarmthresholds for an existing system, and for evaluating the incre-mental benefit of adding sensors to an existing system. Due tothe large volume of containers screened over time, modest dif-ferences in network performance extrapolate into large numbersof affected containers.
APPENDIX
DERIVATION OF APPROXIMATION FORMULAE
Consider the false positive probability (1),
The distribution of is multivariate Gaussian withall means equal to zero and all standard deviations equal to one.The correlation between and is , thatbetween and is , and that betweenand is .
Using the general Birnbaum result for multivariate Gaussianswith
and
Denote the mean of conditional on by ,i.e.,
and denote the conditional covariance matrix of con-ditional on by . The th element of is
as in the text. Using other probabilistic results ([12], [13]), theand elements of equal
for

PICARD AND BURR: NETWORKED SENSORS FOR CARGO SCREENING 1395
Restated, the joint distribution of the standardized quantitiesand
and
has means equal to zero, standard deviations equal to one, andcorrelation equal to . Further, is equivalentto , and is equivalent to ,where is defined analogously to
Since the joint distribution of and is similar to thebivariate form described earlier, with means equal to zero, stan-dard deviations equal to one, and correlation equal to ,the corresponding approximations are
and
The reason for the approximation symbols is that the joint con-ditional distribution of conditional on is notbivariate normal. Repeating exactly the approach used to obtainthe two-sensor probability gives
for
and
which is (1) in the text.Equation (3) for the DP is derived similarly. Begin with the
standardized quantities
and
In the latter equation for , recall that
has mean equal to
and standard deviation equal to
Some algebra shows that the means of the standardized quan-tities and are zero (by construction) and the standard de-viations of the standardized quantities are equal to one (againby construction). The correlation between and is, where
is as in (4).At this point, calculations proceed similar to those for
the false positive probabilities. Note that isequivalent to , for the standardized quantity
and as in (2). Similarly,is equivalent to , for and
.Since and are Gaussian and standardized
the conditional standard deviation is
and the DP is
“ ”
which is (3).For (5), begin with the standardized quantity
Correlations with the other standardized quantities are
and

1396 IEEE SENSORS JOURNAL, VOL. 8, NO. 8, AUGUST 2008
Using these results, the mean of conditional onby is
Similar to the derivation of (1), the variance ofconditional on is
and the covariance between and conditional onis
for
Thus, for and , thejoint distribution of
has means equal to zero, standard deviations equal to one, andcorrelation equal to .
It follows from a bivariate normal approximation that
and
Thus, the Gaussian approximation is
which leads to (5).
REFERENCES
[1] S. Anand, D. Madigan, R. Mammone, S. Pathak, and F. Roberts, “Ex-perimental analysis of sequential decision making algorithms for portof entry inspection procedures,” in Proc. IEEE Int. Conf. Intell. Secu-rity Informatics, San Diego, CA, May 2006.
[2] R. Kouzes, J. H. Ely, B. D. Geelhood, R. R. Hansen, E. A. Lepel, J. E.Schweppe, E. R. Siciliano, D. J. Strom, and R. A. Warner, “Naturallyoccurring radioactive materials and medical isotopes at border cross-ings,” in Proc. IEEE Nuclear Science Symp., 2004, pp. 1448–1452.
[3] A. Kudo, “A multivariate analogue of the one-sided test,” Biometrika,vol. 50, pp. 403–418, 1963.
[4] W. H. Press, B. P. Flannery, S. A. Teukolsky, and W. T. Vetterling,Numerical Recipes in C. Cambridge, U.K.: Cambridge Univ. Press,1990.
[5] Z. W. Birnbaum, “Effect of linear truncation on a multinormal popula-tion,” Ann. Math. Stat., vol. 21, pp. 272–279, 1950.
[6] M. D. Pandey, “An effective approximation to evaluate multinormalintegrals,” Structural Safety, vol. 20, pp. 51–67, 1998.
[7] M. D. Pandey and A. Sarkar, “Comparison of a simple approxima-tion for multinormal integration with an importance sampling-basedsimulation method,” Probabilistic Engineering Mechanics, vol. 17, pp.215–218, 2002.
[8] M. Fitzgerald, R. Picard, and T. Burr, “Surveillance strategies and de-cision making for port surveillance,” Los Alamos National Lab., LosAlamos, NM, Tech. Rep. LA-UR-06-7736, 2006.
[9] J. Ely, R. Kouzes, J. Schweppe, E. Siciliano, D. Strachan, and D. West,“The use of energy windowing to discriminate SNM from NORM inradiation portal monitors,” Nucl. Instrum. Methods Phys. Res. A, vol.560, pp. 373–387, 2006.
[10] T. Burr, J. Gattiker, K. Myers, and G. Tompkins, “Alarm criteria inradiation portal monitoring,” Appl. Radiation Isotopes, vol. 65, pp.569–580, 2007.
[11] J. C. Pratt and D. A. Close, “Application of sequential probability ratiotest to uranium enrichment verification,” Nucl. Instrum. Methods Phys.Res., vol. A258, pp. 255–260, 1987.
[12] A. C. Aiken, “Notes on selection from a multivariate normal popula-tion,” Proc. Edinburgh Math. Soc. B., vol. 4, pp. 106–110, 1934.
[13] N. R. Mendell and R. C. Elston, “Multifactorial qualitative traits: Ge-netic analysis and prediction of recurrence risks,” Biometrics, vol. 30,pp. 41–57, 1974.
[14] R Language for Statistical Computing. [Online]. Available: www.r.project.org
Rick Picard has been a Member of Technical Staff at the Los Alamos NationalLaboratory, Los Alamos, NM, since 1981. In addition to his work with sensorinstrumentation (especially as related to nuclear materials accounting), he haspublished extensively in the area of methodology for Monte Carlo simulationof dynamic physical systems. Other current research interests include nuclearforensics, cross validation, and biosurveillance.
Tom Burr received the Ph.D. degree in statistics from Florida State University,Tallahassee.
He joined Los Alamos National Laboratory, Los Alamos, NM, in 1992. Hisresearch areas include statistical aspects of nuclear material assay as related tothis paper. Data fusion of various types, including the use of networked sensors,continues to generate research.