-
Regulacijske strategije
Prikaz naina analize i sinteze mehatronikih sustava
to je LINEARNI sustav a to vremenski NEPROMJENLJIVI sustav ?
-
ANALIZA U VREMENSKOJ DOMENI
Za veinu regulacijskih sustava, bez obzira na to koji se alati
za analizu i sintezu koriste, u konanoj provjeri valjanosti sinteze
(ispunjenosti postavljenih kriterija) koristi se provjera s
vremenskim odzivom na referentni signal.
Koji su pojmovi nuni za poznavanje pri sintezi u vremenskoj
domeni?
(I) test signali
Slue za provjeru pokazatelja kvalitete sinteze: odskona (step)
funkcija, funkcija usporenog rasta (rampa), parabolina funkcija),
sinusna funkcija.
22 /)()(
)()()()(
ttuRtr
ttuRtrtuRtr
s
s
s
=
=
=
3
2
sRsR
sRsR
sRsR
/)(
/)(
/)(
=
=
=
-
ANALIZA U VREMENSKOJ DOMENI
)(sG
)(sH
)(sY
)(ty
)(sR
)(tr )(te
)(sE_
(IV) Teorem konane vrijednosti
)()(1)(lim
0 sHsGssRe
sss +=
Karakteristini polinom
)()(1)()(
sHsGsRsE
+=
(III) Pogreka u stacionarnom (ustaljenom) stanju (Trajno
regulacijsko odstupanje )
=t
ss tee )(lim
(II) Pogreka openito )()()( tytrte s=
-
ANALIZA U VREMENSKOJ DOMENI
(V) Tip servomehanizma, red astatizma (tip sustava). Vaan u
definiciji trajnog regulacijskog odstupanja, definiran je brojem
integralnih lanova u prijenosnoj funkciji otvorenog kruga
G(s)H(s).
(VI) Koeficijent regulacijskog odstupanja (po poloaju, brzini i
ubrzanju).Definira se u ovisnosti o vrsti pobudne funkcije, a iznos
svakogkoeficijenta pogreke ovisi o astatizmu (V), [1].
-
ANALIZA U VREMENSKOJ DOMENI
Koeficijenti regulacijskog odstupanja Kj se dobiju razlaganjem
funkcije 1/(1+G0) u red po rastuim potencijama od s u okoliu s=0
(detaljan izvod u [1])
Za neke tipine ulazne signale (odskona funkcija-STEP, funkcija
usporenog rasta-RAMPA i sl. koeficijenti regulacijskog odstupanja
imaju konkretan fizikalni smisao.
( )sGsK js
j 00
= limPoopeni izraz za pogreku (IV)
j=0, K0=Kp STEP ulazna funkcija koeficijent poloajne pogrekej=1,
K1=Kv RAMPA ulazna funkcija koeficijent brzinske pogreke j=2, K2=Ka
PARABOLA ul. Funkcija koeficijent pogreke ubrzanja
-
ANALIZA U VREMENSKOJ DOMENI
Prikaz trajnih regulacijskih odstupanja za pojedine tipove
sustava (j=0-2)
sse sse sse
pKR+1
VKR
aKR
-
ANALIZA U VREMENSKOJ DOMENI
Primjer (1): Za statiki sustav koeficijent poloajne pogreke
(j=0, Kj=K0), odziv izlazne veliine na odskonu funkciju) rezultira
statikom stacionarnom pogrekom ess=R/(1+K0)=R/(1+Kp)
Primjer (2): Za astatiki sustav (j=1), odziv izlazne veliine na
linearno rastuu funkciju rezultira statikom stacionarnom pogrekom
ess=R /Kv
-
ANALIZA U VREMENSKOJ DOMENI
(VI) Veza vremenske domene i frekvencijske domene
Referentni model sustava drugog reda opisan linearnom
diferencijalnom jednadbom drugog reda s konstantnim
koeficijentima
22
2
2)()()(
nn
n
sssRsYsG
++== )2(
)( 222
nn
n
ssssY
++=
U vremenskoj domeni
)arccos1sin(1
1)( 22
+
=
tety ntn
odziv na step
-
ANALIZA U VREMENSKOJ DOMENI (kompleksno-konjugirani polovi u
kompleksnoj ravnini)
Korijeni karakteristine jednadbe odreuju ponaanje sustava
jjss nn
=
= 221 1,
priguenjatkoeficijenrelativnioscilacijaihnepriguenafrekvencij
oscilacijapriguenihafrekvencij
n
p
)(
s1
s2
n
pol s-ravnina
21 = n
n =0
j
-
ANALIZA U VREMENSKOJ DOMENI(kompleksno-konjugirani polovi u
kompleksnoj
ravnini)
U prijelaznoj funkciji se mnoi s t , dakle definira brzinu
porasta prijelazne funkcije. Drugim rijeima 1/ je vremenska
konstanta (T) sustava. Ako je vie ulijevo u kompleksnoj ravnini,
odziv je bri (manja vremenska konstanta).
Primjer: Sustav je opisan prijenosnom funkcijom zatvorenog kruga
K/(1+pT)
Pol p1=-1/T; mala vremenska konstanta (brz odziv sustava)
rezultira velikom udaljenou pola u lijevo od imaginarne osi u
kompleksnoj ravnini (brzi pol)
-
ANALIZA U VREMENSKOJ DOMENI
Krivulje konstantne nepriguene (a) i priguene (d) vlastite
frekvencije, relativnog koef. prig.(b) i koef.prig. (c).
Prijelazna funkcija procesa drugog reda za a) relativno
prig.=0.7 i promjenljivu i b) za konstantnu prirodnu frekvenciju i
promjenljivo prig.
a) b)
c) d)
b)
a)
1n2n
3n
s-ravnina
j
0
123 nnn >> j
POZITIVNO PRIGUSENJE
POZITIVNO PRIGUSENJE
NEGATIVNO PRIGUSENJE
NEGATIVNO PRIGUSENJE
0
0=
0=
12 >
2
1
2
1
s-ravnina
12
j
POZITIVNO PRIGUSENJE
POZITIVNO PRIGUSENJE
NEGATIVNO PRIGUSENJE
NEGATIVNO PRIGUSENJE
0
s-ravnina
32 1
012 >>03
-
ANALIZA U VREMENSKOJ DOMENI (korijeni karakteristine jednadbe i
odgovarajue prijelazne funkcije )
j
1>
j
1=
j
1>
j
j
0=
10 >>
j
1
-
ANALIZA U VREMENSKOJ DOMENI
pogreka u stacionarnom stanju ess,
izlazne veliine u stacionarnom stanju i idealnog odziva (u
postocima idealne vrijednosti izlazne veliine)vrijeme porasta tr,
potrebno da izlazna veliina naraste od 10-90% konane
vrijednosti
vrijeme kanjenja td, vrijeme potrebno da izlazna veliina naraste
na 50% konane vrijednosti
vrijeme postavljanja ts, vrijeme potrebno da izlazna veliina
dosegne definirano podruje oko konane vrijednosti i ostane u tom
podruju; npr. +/-5%
razlika izmeu stvarne vrijednosti
maksimalno nadvienje m=(ymax-yss) 100%/yss, ili u postocima
vrijeme prvog maksimuma tmax, vrijeme postizanja maksimalnog
nadvienja m
-
ANALIZA U VREMENSKOJ DOMENI
;69.002.3
-
ANALIZA U VREMENSKOJ DOMENI(Primjer)
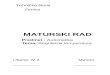
px
cx
py
0>cF
0>
x
y
pM
cM
tx
Elektromehaniki model (Kolica s Ovjeenim NJihalom) KONJ-a, skica
za analizu a) i realni model u mehatronikom laboratoriju b).
-
ANALIZA U VREMENSKOJ DOMENIRegulacijski zahtjevi
Postotno nadvienje izlazne veliine (xt(t), pozicija vrha
njihala) na jedininu pobudu mora biti manje od 5%, m < 5%
Vrijeme postavljanja (regulacije) izlazne veliine (xt (t),
pozicija vrha njihala) na jedininu pobudu mora biti manje od 2.2 s
, ts < 2.2 s.
Statika pogreka sustava mora biti jednaka nuli, ess = 0
-
ANALIZA U VREMENSKOJ DOMENIMatematiki model
Matematiki model elektromehanikog sustava se dobiva koritenjem
DAlambertovog naela ili postavljanjemLagrangeovih (energetskih )
jednadbi
DAlambertovo naelo omoguava da se svaki zadatak dinamike
promatra kao dinamika ravnotea svih sila, ukljuujui i inercijsku.
Radi se o modificiranom II Newtonovom zakonu
amF = 0= amF 0=+ iFF
DAlambertova (inercijska) silaRezultantna sila koja djeluje na
masu m
-
ANALIZA U VREMENSKOJ DOMENIMatematiki model
Lagrangeove jednadbe za sustav s n stupnjeva slobode, se
izraavaju u sustavu s poopenim koordinatama q1 qn. U ovom sluaju su
poopene (fizikalno odabrane) koordinate pozicija kolica xc i kut
njihanja (alfa).
Opi oblik Lagrange-ovih jednadbi:
cxcc
QLx
Lxt
=
&
QLL
t=
&
pk EEL =
Ukupna sila primijenjena u koordinati xc)()()( txBtFtQ ceqcxc
&=
Ukupna sila primijenjena u koordinati)()( tBtQ p &=
Lagrangian sustava, jednak razlici ukupne kinetike i
potencijalne energije sustava
-
ANALIZA U VREMENSKOJ DOMENIMatematiki model
2222
222
2222
2322
)sin()()()sin()cos(
))(sin()()cos()sin()()(
ppppcppc
cppppp
ppppcppc
ppppppppceqpppc
lMlMMIMMFlMIglM
tlMlMMIMMBlMIMllMxBlMI
x
+++
+++
++++
++++=
&&&&&
2222
2222
222
)sin()()cos()sin()(
)sin()()cos()cos()sin()(
ppppcppc
ppcpppc
ppppcppc
ceqppppppc
lMlMMIMMlMFglMMM
lMlMMIMMxBlMlMBMM
+++
++
++++
++=
&&&&&
Nelinearne jednadbe elektromehanikog sustava
-
ANALIZA U VREMENSKOJ DOMENIMatematiki model
Linearizacija jednadbi elektromehanikog sustava (u okolini kuta
=0):
...!!
)sin(;...!!
)cos( +=+=5342
15342 == )sin(;)cos( 1
2
2222
)()()(
ppcppc
cppppppppceqpppc lMMIMM
FlMIglMBlMxBlMIx
++
+++++=
&&&&
2)()()(
ppcppc
cppceqpppppcppc
lMMIMMFlMxBlMglMMMBMM
++
+++=
&&&&
-
ANALIZA U VREMENSKOJ DOMENIMatematiki model
Matematiki model translacijskog krana s njihalom prikazan u
matrinom obliku je
( )( )( )( )
( )( )( )( )
( )tU
HH
ttxttx
HHHHHH
ttxttx
c
c
c
c
+
=
8
4
576
213
00
00
10000100
&
&
&&
&&
&
& H1-H8Izrazi koji predstavljaju vremenski neovisne funkcije
parametara translacijskog krana.
dt...
A
b)(tu )(tx& )(tx
c)(ty
)()()( tutt += bxAx&
)()()( tutty += dxc
dt...
A
b)(tu )(tx& )(tx
C)(ty
)()()( tutt += bxAx&
)()()( tutt += DxCy
SISO SIMO
-
ANALIZA U VREMENSKOJ DOMENIMatematiki model
[ ]
( )( )( )( )
==
ttx
ttx
nxtc
c
&
&1)(x [ ]
==
0841084582610932600049065131152161010000100
......
A nxn [ ]
==
526135304100
..
b nxp
=
)()(
)(ttx
t c
y
=
00100001
C
matrica ulazamatrica sustava (objekta)vektor varijabli
stanja
matrica izlazavektor izlaznih varijabli stanja
=
00
D
matrica prijenosa prijenosna matrica
-
ANALIZA U VREMENSKOJ DOMENISinteza regulatora
VANO !!!!!
Ukoliko su dostupne sve varijable stanja, upravljaka funkcija je
LINEARNA KOMBINACIJA varijabli stanja.
(engl. Full State Feedback Control)
Zato koristimo sintezu u prostoru stanja?
Sinteza sustava se moe generalizirati i na NELINEARNE
sustave
Mogua sinteza i za poetne uvjete nule (nije mogue sa prijenosnom
funkcijom
Jasna geometrijska interpretacija (prikaz u faznoj ravnini,
fazni portret)
-
ANALIZA U VREMENSKOJ DOMENISinteza regulatora
Sustav od n varijabli stanja zahtijeva n koeficijenata vektora
pojaanja K
xKbxAx +=&
[ ] 0)det = Kb(AIs
dobije se polinom n-tog reda s koef. K1, K2, ..., Kn.
CILJ:
Odrediti koeficijente (pojaanja) vektora K tako da se polovi
zatvorenog kruga postave na ELJENA MJESTA u kompleksnoj ravnini
Da li je to realistina pretpostavka ?
Nije, zamirite, napravite sintezu regulatora i onda dokuite kako
da doete do n varijabli stanja (neto mjerenjem, neto estimiranjem)
!!!
-
ANALIZA U VREMENSKOJ DOMENISinteza regulatora
Metode odreivanja koeficijenata K upravljake funkcije
Postavljanje polova na (engl. Pole Placement, PP) na eljene
lokacije prema zahtjevima u vremenskoj domeni
Linearna kvadratina kriterijska funkcija na upravljaku funkciju
i varijable stanja, (enl. LinearQuadratic Regulator, LQR)
nnnn jpjp =+= 21 ,
Kpp = place(A,b,[p1 p2 p3 p4])
[ ]
+=0
dtJ RuuQxx TT
Klqr = lqr(A,b,Q,R)
-
ANALIZA U VREMENSKOJ DOMENISinteza regulatora
22
100
100
+
=
m
m
ln
ln
sn t=
4
690.=stsm
225.
%=
= 21 =
7230.=
p1 = -1.8182 + j1.9067 ; p2 = -1.8182 - j1.9067
nnnn jpjp =+= 21 ,
Primjer: Postavljanje polova (Pole Placement, PP), (I)
dominantni polovi
zahtjevi
-
ANALIZA U VREMENSKOJ DOMENISinteza regulatora
Primjer: Postavljanje polova (Pole Placement, PP), (II)
nedominantni polovi
Nedominantni polovi: p3 = -20 ; p4 = -40
Prikaz eljenih polova pomou matlab funkcije 'pzmap'
T
ppKK
==
477623009288
6252105347160
.
..
.
Kpp = place(A,b,[p1 p2 p3 p4])
-
ANALIZA U VREMENSKOJ DOMENISinteza regulatora
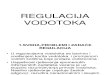
Primjer: Postavljanje polova (Pole Placement, PP), (III)
Pored eljenih polova, postoje i nule z1 i z2, pri emu je jedna
od nula (z2) u desnoj poluravnini.
Nula z2 ima za posljedicu negativni kut otklona (ili pozicije)
njihala u poetku gibanja, to se vidi u prijelaznoj funkciji kuta
njihala (slijedei slide)
Za ovakav sustav se kae da je neminimalno fazni sustav.
Polovi zatvorenog kruga s definiranim polovima prema prethodnom
slideu
-
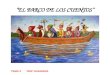
ANALIZA U VREMENSKOJ DOMENIRezultati sinteze regulatora
2
1
3
1
2
3
Odziv pozicije vrha njihala, uz (1) i bez regulacije njihanja
(2), na referentnu veliinu pozicije kolica (3)
Odziv pozicije vrha njihala, s LQR-om (1), s PP regulator (2) na
skokoviti oblik referentne veliine pozicije kolica (3)
-
ANALIZA U VREMENSKOJ DOMENISinteza regulatora
NAPOMENA:
Analiza i sinteza se provodi bez referentnog upravljakog
signala.
S referentnim ul. signalom mora se provesti postupak prorauna
kompenzatora N, iz zahtjeva ess=0
Nain prorauna se posebno daje u [ 3]
N Proces
-K
xr +
+
yu
x
-
LITERATURA
1. Lj. Kuljaa, Z. Vuki.Automatsko upravljanje sistemima, kolska
Knjiga Zagreb, 1985. (Postoji novo izdanje)
2. Quanser, Single Pendulum Gantry, electromechanical module,
dokumentacija, 2001.
3. I.Fuljati: Regulacija brzine gibanja mehatronikog
translacijskog sustava kranskog pogona s ovjeenim teretom uz
istovremenu regulaciju njihanja tereta, diplomski rad 1646,
FER-ZESA, Zagreb, 2004.
Regulacijske strategijeANALIZA U VREMENSKOJ DOMENIANALIZA U
VREMENSKOJ DOMENIANALIZA U VREMENSKOJ DOMENIANALIZA U VREMENSKOJ
DOMENIANALIZA U VREMENSKOJ DOMENIANALIZA U VREMENSKOJ DOMENIANALIZA
U VREMENSKOJ DOMENIANALIZA U VREMENSKOJ DOMENI
(kompleksno-konjugirani polovi u kompleksnoj ravnini)ANALIZA U
VREMENSKOJ DOMENI (kompleksno-konjugirani polovi u kompleksnoj
ravnini)ANALIZA U VREMENSKOJ DOMENIANALIZA U VREMENSKOJ DOMENI
(korijeni karakteristine jednadbe i odgovarajue prijelazne funkcije
)ANALIZA U VREMENSKOJ DOMENIANALIZA U VREMENSKOJ DOMENIANALIZA U
VREMENSKOJ DOMENI (Primjer)ANALIZA U VREMENSKOJ DOMENIRegulacijski
zahtjeviANALIZA U VREMENSKOJ DOMENIMatematiki modelANALIZA U
VREMENSKOJ DOMENIMatematiki model ANALIZA U VREMENSKOJ
DOMENIMatematiki modelANALIZA U VREMENSKOJ DOMENIMatematiki
modelANALIZA U VREMENSKOJ DOMENIMatematiki modelANALIZA U
VREMENSKOJ DOMENIMatematiki modelANALIZA U VREMENSKOJ DOMENISinteza
regulatoraANALIZA U VREMENSKOJ DOMENISinteza regulatoraANALIZA U
VREMENSKOJ DOMENISinteza regulatoraANALIZA U VREMENSKOJ
DOMENISinteza regulatoraANALIZA U VREMENSKOJ DOMENISinteza
regulatoraANALIZA U VREMENSKOJ DOMENISinteza regulatoraANALIZA U
VREMENSKOJ DOMENIRezultati sinteze regulatoraANALIZA U VREMENSKOJ
DOMENISinteza regulatoraLITERATURA