Embed Size (px)
Citation preview

ACQUIRING IN-SITU HIGH-RESOLUTION SOIL INFORMATION USING COST-EFFECTIVE TECHNOLOGY
Mohammad Omar Faruk Murad
A thesis submitted to fulfil requirements for the degree of
Doctor of Philosophy
2021
School of Life and Environmental Science
Faculty of Science
The University of Sydney
New South Wales
Australia

i
STATEMENT OF ORIGINALITY
This is to certify that to the best of my knowledge, the content of this thesis is my own work.
This thesis has not been submitted for any degree or other purposes.
I certify that the intellectual content of this thesis is the product of my own work and that all
the assistance received in preparing this thesis and sources have been acknowledged.
Mohammad Omar Faruk Murad
November 2020

SUMMARY
Soil is an essential natural resource for our agriculture-based food production systems. Soil
plays the most important role in Earth's ecosystem by filtering the rainwater, regulating the
discharge of excess rainwater, buffering against pollutants, and storing large amounts of
organic carbon. The production of the crop and ecosystem services are greatly influenced by
the physical properties (such as soil moisture, organic carbon, particle size distribution, bulk
density etc.) of soils.
To optimize the precious natural resources, soil conditions need to be monitored precisely and
accurately regularly. Conventional methods for soil physical properties are laborious, time-
consuming, expensive, and destructive. Also, soil properties widely vary both horizontally and
vertically within the field. To monitor soil variability, we need to develop new in-situ
technologies and techniques that can accurately measure soil physical properties rapidly, cost-
effectively and non-invasively across the cropping fields. The cost-effective and quick
measuring techniques allow greater representation of the spatial distribution of soil physical
properties. This thesis aims to provide new technologies that enable soil investigation at finer
spatial and temporal resolution. In particular, this thesis contributes to developing new methods
for measuring soil moisture dynamics and organic carbon in situ, and soil density and particle
size analysis in the laboratory with high accuracy.
To understand drought tolerance mechanisms and phenotypic water use traits in crop breeding
programs, a plastic buggy system based on the EMI surveys was developed (Chapter 2) for
monitoring crop water use at the plot level. Soil ECa of different plots calibrated with soil
volumetric water content and used to determine the total water use by various chickpea
genotypes. The ECa data recorded from the EMI surveys were used for the depth-specific
temporal analyses of soil water use by different genotypes (Chapter 3). The system can detect
water extraction at different depths, and thus the chickpea genotypes can be grouped based on
their root activities. The chickpea genotypes from rainfed plots extracted more water compared
to the genotypes grown in irrigated plots. Depth profiles of available soil moisture at various
growth stages showed most of the soil water was extracted from the depth below 1 m.
ii

For mitigating global warming by reducing atmospheric CO2 and increasing crop production a
rapid in-situ soil organic carbon (SOC) measurement technique using a VisNIR penetrometer
system from high-resolution in-situ spectra was introduced (Chapter 4) in this thesis. It was
observed that penetrometer external parameter orthogonalisation (EPO) transformation
matrices successfully removed the effects of soil moisture from the in-situ VisNIR spectra. The
validation statistics between the predicted SOC and the SOC measured in the laboratory
indicate the potential of VisNIR penetrometer system as viable tool for in-situ SOC
measurement.
Conventional particle size analysis in the laboratory using hydrometer method is tedious and
practically unable to produce a continuous particle size distribution curve. In this thesis, an
automated hydrometer method using a ToF distance and a digital temperature sensor was
introduced (Chapter 5). The proposed automated hydrometer method was used to automatically
record hydrometer reading with suspension temperature and produce a continuous particle-size
distribution curve (2-40 μm range).
Soil compaction is a growing problem that can lead to impermeable layers within the soil that
restrict water and nutrient cycles. Bulk density and soil stiffness moduli are related to soil
compaction, porosity etc. and required to be monitored spatially. In this thesis, a novel
technique based on shear wave velocity using piezoelectric sensors was introduced for
measuring bulk density and soil stiffness moduli in the laboratory (Chapter 6). This technique
was a rapid, cost-effective and accurate method for predicting bulk density, shear, and young
moduli, which can be used directly in the field in the future.
iii

iv
PUBLISHED CHAPTERS OF THIS THESIS Chapter 5 of this thesis is published as: Murad, M. O. F., Jones, E. J., & Minasny, B. Automated soil particle size analysis using time of flight
distance ranging sensor. Soil Science Society of America Journal. I designed the study with the co-authors, collected and analysed the data and wrote the drafts of the manuscript. Jones helped me with the laboratory experiments and analysing the data.
Chapter 6 of this thesis is published as: Murad, M. O. F., Minasny, B., Malone, B., & Crossing, K. (2020). Measuring soil bulk density from shear
wave velocity using piezoelectric sensors. Soil Research. I designed the study with the co-authors, collected and analysed the data and wrote the drafts of the manuscript. Crossing helped me with the hardware design of the closed system.
Publications in preparation from this thesis
Chapter 2 Murad, M. O. F., Minasny, B., McBratney, A.B., Bramley, C. & Bramley, H., Monitoring Soil Water Use at
the Plot Level Using Electromagnetic Induction Surveys.
Chapter 3 Murad, M. O. F., Minasny, B., McBratney, A.B., Bramley, C. & Bramley, H., Temporal Analysis of Soil
Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys.
Chapter 4 Murad, M. O. F., Jones, E. J., Minasny, B. & McBratney, A.B., VisNIR Penetrometer System for Predicting
Soil Carbon.
In addition to the statements above, in cases where I am not the corresponding author of a published item, permission to include the published material has been granted by the corresponding author.
Mohammad Omar Faruk Murad 27 November 2020
As supervisor for the candidature upon which this thesis is based, I can confirm that the authorship
attribution statements above are correct.
Budiman Minasny 27 November 2020

v
OTHER PRESENTATIONS AND POSTERS MADE FROM THIS THESIS
Presentations
Murad, M. O. F., Minasny, B., Bramley, H. & McBratney, A.B., Monitoring Soil Water Use at the Plot Level Using Electromagnetic Induction Surveys. Conference on science, technology, engineering and economics for Digital Agriculture (steeDA), 2019.
Murad, M. O. F., Minasny, B. & Jones, E. J., Hydrometer Test Automation Using Time of Flight Distance and Digital Temperature Sensor, EGU General Assembly, 2019.
Murad, M. O. F., Minasny, B., Malone, B.P. & Crossing, K., A novel technique for measuring soil density from shear wave velocity using piezoelectric sensors, National Soil Science Conference, 2018.
Posters Murad, M. O. F., Minasny, B., Malone, B.P. & Crossing, K., A novel technique for measuring soil density
from shear wave velocity using piezoelectric sensors, National Soil Conference, 2018, Australia.
Murad, M. O. F., Minasny, B., Bramley, H. & McBratney, A.B., Monitoring Soil Water Use at the Plot Level Using Electromagnetic Induction Surveys, SIA HDR Showcase, 2019, The University of Sydney.
Awards Best poster presentation - SIA HDR Showcase, 2019, The University of Sydney

vi
ACKNOWLEDGMENTS First of all, I would like to thank almighty Allah for giving me the faith, health and patience to finish
my PhD studies.
I would like to thank my supervisor, Budiman Minasny, for his directions, advice, patience and for the
freedom he gave me in pursuing this research. Coming from a different area of study, initially it was
hard for me to understand the main focuses of soil science in agriculture. Thank you, Budi for tolerating
me over the duration of this study and correcting my simplest mistakes with a smile on your face. I
could not imagine having had a better supervisor.
I would like to give sincere gratitude to Brendan Malone for helping me with my manuscript and
introducing me to the soil carbon sequestration industry in Australia. Also, Helen Bramley for providing
me with all the logistical support required to conduct field experiments at PBI, Narrabri.
Alex McBratney for the new ideas and advice for widening my several research topics from various
perspectives. Thanks Alex, for engaging me with the cutting-edge research on soil moisture and
introducing me with the NSW Smart Sensing Network (NSSN).
Edward Jones for engaging me with several research projects and helping me with everything from
understanding theoretical concepts, fieldwork and data analysis to publishing the key findings. Thank
you, Ed for all the support and guidance.
I would like to thank Philip Hughes for helping me settle into Sydney when I first arrived. Also, for his
continuous support, encouragement, suggestions and introducing me to R.
Thomas Bishop, Floris Van Ogtrop, Liana Pozza, Balwant Singh, David Airey and Guien Miao for
allowing me to work as a demonstrator in the faculty of Science and Engineering.
Kipling Crossing for teaching me electronics, hardware design and helping me with field operations.
Jingyi Huang for helping me with the analysis of EMI survey data and for showing me how to use
EM4Soil.
Mario Fajardo for helping me with R and Ian for helping me with Python and QGIS. Tom O’Donoghue
for proofreading my manuscripts, thesis chapters and for all the advice on improving my writings.

vii
Yuxin, Wartini, James, Ignacio, José and Dhahi for assisting me to overcome my issues with R. Patrick,
Vanessa, Kate, Niranjan, Stacey, Niranjan, Kanika, PeiPei, Yumi, Alex, Brett, Stephen and Uta for
supporting me over the last few years.
For technical support, I would like to thank Glen, Ivan, and Michael. A special thanks to Iona for taking
the care of my dietary requirement during field trips.
And to everyone that I have forgotten to mention above.
I would also like to thank my father (Salek Makbul), brother (Omar Sharif), sister-in-law (Mou Sharif),
in-laws (Shamsun Nahar, Abdul Mannan, Sumaiya, Sabrina) close relatives for the support and
encouragement. A special thanks to my close friends (Zenat, Galib, Nabil and Preety and other
childhood friends) for continuously inspiring me to achieve my goals and taking good care of my
parents while I am away.
My beloved wife, Sadia Mitu. I could not have finished my PhD studies without her unconditional love,
support, inspirations, patience and understanding. Thank you for taking good care of me during my hard
time and busy days.
Finally, I would like to express my deepest appreciation to my mum (Momtaz Jahan), the most
important person in my world. I will not be here without her. Thank you for taking care of everything
from the day I was born. Thank you for unconditional love and fulfilling my each and every need and
tolerating my faults. I could not have achieved anything without your prayers. Love you mum.

viii
DEDICATION
To my lovely mum for her endless support, inspiration and encouragement.

ix
CONTENTS STATEMENT OF ORIGINALITY............................................................................................ i
SUMMARY ............................................................................................................................... ii
PUBLICATIONS AND PRESENTATIONS MADE FROM THIS THESIS. ......................... iv
OTHER PRESENTATIONS AND POSTERS MADE FROM THIS THESIS......................... v
ACKNOWLEDGEMENTS ....................................................................................................... vi
DEDICATION............................................................................................................................ viii
CONTENTS ............................................................................................................................... ix
LIST OF TABLES ...................................................................................................................... xiii
LIST OF FIGURES ..................................................................................................................... xiv
LIST OF ABBREVIATIONS ..................................................................................................... xviii
CHAPTER 1 GENERAL INTRODUCTION………………………………………………….. 1
1.1 Background.................................................................................................................... 2
1.2 Visualisation of research topics on soil properties in agriculture……………………… 4
1.3 Statement of Problem..................................................................................................... 6
1.3.1 Soil Moisture Analysis.......................................................................................... 7
1.3.2 Soil organic carbon analysis…………………………………………………….. 8
1.3.3 Using Cheap sensors to analyse soil physical properties………………………… 9
1.4 Thesis Objectives........................................................................................................... 11
1.5 References...................................................................................................................... 14
CHAPTER 2 DEVELOPMENT OF A CROP WATER USE MONITORING SYSTEM AT
THE PLOT LEVEL………………………………………………………………………….. 20
2.1 SUMMARY……………………………………………………………………………. 21
2.2 Introduction…………………………………………………………………………….. 21
2.3 Materials and Methods…………………………………………………………………. 26
2.3.1 EMI system testing………………………………………………………………. 26
2.3.2 The buggy system……………………………………………………………….. 27
2.3.3 Collection of EMI data…………………………………………………………... 28
2.3.4 Inversion of the EMI data………………………………………………………... 29
2.3.5 Field trial on water use of chickpeas……………………………………………. 30
2.4 Results and Discussion…………………………………………………………………. 33
2.4.1 Environmental effects on EM measurements…………………………………… 33
2.4.1.1 Stability check of EM38-MK2…………………………………………… 33
2.4.1.2 Temperature effect on EM38-MK2………………………………………. 34
2.4.2 Calibration of the ECa data to soil moisture content……………………………. 37

x
2.4.3 Field trial on water use efficiency of chickpea genotypes……………………… 39
2.4.3.1Total water use of different chickpea genotypes…………………………. 39
2.4.4 Comparisons of ECa data with the Neutron probe results………………………. 40
2.5 Conclusions…………………………………………………………………………….. 41
2.6 References……………………………………………………………………………… 43
CHAPTER 3 TEMPORAL ANALYSIS OF SOIL WATER EXTRACTION BY
DIFFERENT GENOTYPES OF CHICKPEAS USING EMI SURVEYS……………………. 50
3.1 Summary……………..……………..……………..……………..……………..……… 51
3.2 Introduction…………………………………………………………..………………… 52
3.3 Materials and Methods……………………………………..……………..…………….. 55
3.3.1 EMI Measurement System…………………………..……………..…………… 55
3.3.2 Field location……………..……………..……………..……………..…………. 56
3.3.2.1 Chickpea variety 2018 trial……………..……………..…………………... 57
3.3.2.2 Chickpea variety 2019 trial……………..……………..…………………… 58
3.3.3 Inversion of the EMI data……………..……………..……………..…………… 60
3.3.4 Calibration of ECa data……………..……………..……………..………………. 61
3.3.5 Water use calculation……………..……………..……………..………………... 61
3.3.6 Data Analysis……………..……………..……………..……………..………… 62
3.3.6.1 Soil moisture time series and depth profile of cumulative RAW analyses
from 2018 EMI survey……………..……………..……………..………………… 62
3.3.6.2 Depth profile of cumulative RAW, ∆S, and temporal analyses at different
growth stages from 2019 EMI surveys……………..……………..……………….. 63
3.4 Results and discussion……………..……………..……………..……………..……….. 64
3.4.1 Depth specific temporal analyses for the EMI surveys from 2018 (I5A) ………. 64
3.4.1.1 Time series soil moisture analysis at different layers……………..……….. 64
3.4.1.2 Depth profile of cumulative RAW at different growth stages……………… 72
3.4.2 Depth specific temporal analyses for the EMI surveys from 2019 field trial
(Campey-1) ……………..……………..……………..……………..…………….. 75
3.4.2.1 Depth profile of ∆S of various clusters from EMI surveys at different
growth stages for Campey-1……………..……………..……………..…………… 75
3.4.2.2 Variations in the total water use by different clusters of chickpea genotypes 76
3.4.2.3 Depth profile of cumulative RAW at different growth stages…………….. 77
3.4.2.4 Temporal analysis of ∆S for high and low water-efficient genotypes at
different soil layers at the mature stage……………..……………..………………. 79
3.5 Conclusions……………..……………..……………..……………..……………..…… 80
3.6 References……………..……………..……………..……………..……………..…….. 83

xi
CHAPTER 4 VISNIR PENETROMETER SYSTEM FOR PREDICTING SOIL CARBON…. 87
4.1 Summary……………..……………..……………..……………..……………..…..….. 88
4.2 Introduction……………..……………..……………..……………..……………..…… 89
4.3 Materials and Methods……………..……………..……………..……………..…..…… 93
4.3.1 VisNIR penetrometer system……………..……………..……………..…..……. 93
4.3.2 Field experiments to collect VisNIR spectra using the penetrometer system…… 96
4.3.2.1 Study site……………..……………..……………..……………..………... 96
4.3.2.2 Penetrometer operation and field sampling……………..……………..…… 100
4.3.3 Laboratory processing……………..……………..……………..……………..… 102
4.3.4 VisNIR processing and estimation of SOC……………..……………..…..……. 103
4.3.5 Calculation of SOC stock……………..……………..……………..……………. 106
4.3.6 Validation and other statistics……………..……………..……………..…..…… 106
4.4 Results and Discussion……………..……………..……………..…..…..…..…..…..…. 107
4.4.1 Performance of VisNIR penetrometer system……………..……………..…..….. 107
4.4.2 EPO transformation matrices……………..……………..……………..…..…… 109
4.4.3 Calibration and Validation Between Soil VisNIR Spectra and SOC…………….. 111
4.4.3.1 Dry cores……………..……………..……………..……………..…..…..… 112
4.4.3.2 Moist Cores……………..……………..……………..……………..…..….. 114
4.4.3.3 VisNIR penetrometer system……………..……………..………………… 116
4.4.4 Estimation of SOC stock from VisNIR penetrometer system…………………… 127
4.5. Conclusions……………..……………..……………..……………..…………………. 128
4.6 References……………..……………..……………..……………..…………………… 130
CHAPTER 5 AUTOMATED SOIL PARTICLE SIZE ANALYSIS USING TIME OF
FLIGHT DISTANCE RANGING SENSOR……………..……………..…………………….. 138
5.1 Summary……………..……………..……………..……………..……………………. 139
5.2 Introduction……………..……………..……………..……………..…………………. 140
5.3 Material and Methods……………..……………..……………..……………………… 144
5.3.1 Basic Principles of Gravitational Sedimentation……………..………………… 144
5.3.2 Instrumental Setup……………..……………..……………..………………….. 145
5.3.3 Principle of ToF Distance Sensor……………..……………..…………………. 146
5.3.4 Stability Check of Vl6180x ToF Sensor……………..……………..…………… 148
5.3.5 Experimental Procedure……………..……………..……………..……………... 148
5.4 Results and Discussions……………..……………..……………..……………………. 153
5.4.1 Repeatability……………..……………..……………..……………..…..….. 156
5.5 Conclusions……………..……………..……………..……………..……………..…… 158
5.6 References……………..……………..……………..……………..……………..……. 160

xii
CHAPTER 6 MEASURING SOIL BULK DENSITY FROM SHEAR WAVE VELOCITY
USING PIEZO-ELECTRIC SENSORS……………..……………..……………..…………… 165
6.1 Summary……………..……………..……………..……………..……………..…..….. 166
6.2 Introduction……………..……………..……………..……………..……………..…… 167
6.3 Background study and theory……………..……………..……………..………………. 168
6.4 Materials and method……………..……………..……………..……………..……….. 174
6.5 Results and discussion……………..……………..……………..……………..…..…… 184
6.5.1 Shear wave velocity at different compactions……………..……………..…..….. 184
6.5.2 Predicting bulk density……………..……………..……………..……………… 185
6.5.3 Shear modulus and VS……………..……………..……………..……………… 189
6.5.4 Young modulus and VS……………..……………..……………..…………….. 190
6.6 Limitations……………..……………..……………..……………..……………..…..… 191
6.7 Conclusions……………..……………..……………..……………..……………..…… 192
6.8 References……………..……………..……………..……………..……………..…….. 193
CHAPTER 7 CONCLUDING REMARKS AND FUTURE WORKS……………..…..…..….. 199
7.1 Overview……………..……………..……………..……………..……………..…..….. 200
7.1.1 Plot level soil moisture monitoring using EMI surveys……………..………. 201
7.1.2 Depth-Specific Temporal Analyses of Soil Water Extraction…………….. 201
7.1.3 VisNIR penetrometer system for predicting SOC……………..…..…..…..…. 203
7.1.4 Automated hydrometer method for soil particle size analysis……………..… 204
7.1.5 Bulk Density and Soil Stiffness Moduli from Shear Wave Velocity………… 205
7.2 General conclusions and future directions……………..……………..……………..….. 206
7.3 Closing statement……………..……………..……………..……………..……………. 209
7.4 References……………..……………..……………..……………..……………..…..… 210

xiii
LIST OF TABLES
Table 2.1 Summary of comparisons of different methods for monitoring soil moisture…………….23
Table 2.2 Standard deviation and the Coefficient of Variation of the ECa at different depths below the ground surface……………………………………………………………..............................35
Table 4.1. A summary of the types of soil samples analysed different sites………………………….99
Table 4.2. Calibration and validation statistics for dry cores……………….......................................112
Table 4.3. Calibration and validation statistics for moist cores………………...................................115
Table 4.4. Calibration statistics from VisNIR penetrometer (without EPO) ……………….............117
Table 4.5. Validation statistics for Penetrometer insertion (without EPO) ………………................118
Table 4.6. Calibration statistics from VisNIR penetrometer (with local EPO) ………………..........120
Table 4.7. Validation statistics for Penetrometer insertion (with local EPO) ………………..............121
Table 4.8. Calibration statistics from VisNIR penetrometer (with penetrometer EPO)……………123
Table 4.9. Validation statistics for Penetrometer insertion (with penetrometer EPO)……………..124
Table 5.1. Summary of comparisons of different methods of soil particle size analysis (data derived from: Coates & Hulse, 1985; Beuselinck et al., 1998; Jacob et al., 2002; Arriaga et al., 2006)..………..……………..……………..……………..……………..……………..........142
Table 5.2. Characteristics of soil samples used for testing the automated hydrometer method ……………………………………………………………………………………………...150
Table 6.1. Characteristics of soil samples used for the tests……………………………….. ……...182
Table 6.2. Statistical comparisons between the density equations obtained from Piezoelectric sensor and previous studies……………………………………………………………………......189

xiv
LIST OF FIGURES
Figure 1.1 Spatial variability of soil across the cropping field in Lansdowne Farm, Sydney, New South Wales. ………………..……………..…………………………………………………………3
Figure 1.2 Density visualisation of keywords from word clustering relevant research documents using VOSviewer (v1.6.15) (Van Eck & Waltman 2010) …………………………………………..5
Figure 2.1 Customized plastic buggy for measuring soil ECa at 0, 20, 40, 60, and 80 cm above the ground surface………………………………………………………………………………..28
Figure 2.2 Attachment of EM38-MK2 with customized plastic buggy……………………………...29
Figure 2.3 Trial area divided into Rainfed and irrigated blocks………………………………………30
Figure 2.4 Soil ECa vs. time for different depth below the ground surface…………………………..34
Figure 2.5 Soil EMI vs. ambient temperature for different depth of soil………………………….....37
Figure 2.6 Calibration between VMC and ECa of soil………………………………………………..38
Figure 2.7 Total water uses in mm by different chickpea genotype………………………………….39
Figure 2.8 Comparisons of total water use from EMI surveys and NMM measurements…...............41
Figure 3.1 Plastic chain system for plastic buggy…………………………………………………….56
Figure 3.2 Trial areas (I5A and Campey-1) for chickpea mapping population……………………….57
Figure 3.3 EMI surveys at 0, 20, 40, 60, and 80 cm heights at I5A (2018) and 0, 20, and 80 cm heights at Campey-1 (2019)……………………………………………………….………………….60
Figure 3.4. Cluster means based on the weekly change in soil moisture content (ΔS) over the whole season within 0-30 cm depth. Each line represents a chickpea genotype grouped into clusters of similar patterns. The red line represents the mean value of the cluster…………………...66
Figure 3.5. Cluster means based on the weekly change in soil moisture content (ΔS) over the whole season within 30-60 cm depth. Each line represents a chickpea genotype grouped into clusters of similar patterns. The red line represents the mean value of the cluster.…………………..68
Figure 3.6. Cluster means based on the weekly change in soil moisture content (ΔS) over the whole season within the depth of 60-100 cm. Each line represents a chickpea genotype grouped into clusters of similar patterns. The red line represents the mean value of the cluster……………70
Figure 3.7. ΔS depth profile for all clusters at three different stages from EMI surveys in 2018…...72
Figure 3.8 Soil RAW at different stages (pre-podding, post-podding, and maturity) of plant growth in the irrigated plots for chickpea genotypes with (a) minimum and (b) maximum water extraction throughout the whole season………………………………………………………………....73
Figure 3.9 Soil RAW at different stages (pre-podding, post-podding, and maturity) of plant growth in the rainfed plots for chickpea genotypes with (a) minimum and (b) maximum water extraction throughout the whole season………………………………………………………………....74

xv
Figure 3.10. ΔS depth profile for all clusters at three different stages from EMI surveys in 2019…………………………………………………………………………………………..75
Figure 3.11. Total water uses of various clusters…………………………………………………….76
Figure 3.12. Soil RAW at different stages (pre-podding, post-podding, and maturity) of plant growth chickpea genotypes with (a) minimum and (b) maximum water extraction all over the growing season………………………………………………………………………………………...78
Figure 3.13. Available soil VMC of different layers against the days after sowing for least and most water-efficient chickpea genotypes………………………………………………………......80
Figure 4.1 VisNIR penetrometer with ultrasonic depth sensor…………..…………….……………..95
Figure 4.2 Instrumentation box including ASD spectroradiometer, circuit board and 12-volt battery………………………………………………………………………………………...96
Figure 4.3 Locations of sampling sites on Lansdowne Farm, within Australia and in relation to the city of Sydney, New South Wales.…………………………………………………………...…...97
Figure 4.4. Operation of VisNIR penetrometer system in the field………………………………….101
Figure 4.5 Sampling Scheme of all three sites at different days……………………………………..102
Figure 4.6 Methodology scheme of complete study from NIR scans to validations of predicted soil organic carbon (SOC). ……………………………………………………………………..105
Figure 4.7 Soil VisNIR spectra collected from (a) dry and the moist cores in the laboratory and (b) using VisNIR penetrometer system in the field. Mean spectra of dry and moist cores were plotted for laboratory measurements. ………………………………………………………108
Figure 4.8. Wilks’ Λ for a different number of principal components from NIR spectra from sampling sites (local EPO) and combined NIR spectra from sampling sites (penetrometer EPO) …………………………………………………………………………………………..…..110
Figure 4.9. A comparison of EPO projection matrices developed using VisNIR spectra of a) moist cores (local) and b) the penetrometer system. The reference state in both cases were VisNIR spectra of split, air-dried (40°C) soil cores…………………………………………………..111
Figure 4.10. Depth profile of observed and predicted SOC from a single dry core extracted on three different days for all three sites. For spectroscopic measurement, predicted SOC was plotted for every 2 cm. For lab measurements, SOC of 10 cm homogenised depth samples and an additional 0-2 cm topsoil samples were plotted against depths…………………………….114
Figure 4.11. Depth profile of observed and predicted SOC from moist (with local EPO) cores at different days for all three sites. For spectroscopic measurement, predicted SOC was plotted for every 2 cm. For lab measurements, SOC of 10 cm homogenised depth samples and an additional 0-2 cm topsoil samples were plotted against depths………………………….…116
Figure 4.12. Depth profile of observed and predicted SOC from raw spectra on different days for all three sites. For spectroscopic measurement, predicted SOC was plotted for every 2 cm. For lab measurements, SOC of 10 cm homogenised depth samples and an additional 0-2 cm topsoil samples were plotted against depths…………………………………………………..……119

xvi
Figure 4.13. Depth profile of observed and predicted SOC from EPO (local) transformed VisNIR spectra on different days for all three sites. For spectroscopic measurement, predicted SOC was plotted for every 2 cm. For lab measurements, SOC of 10 cm homogenised depth samples and an additional 0-2 cm topsoil samples were plotted against depths………………………122
Figure 4.14. Depth profile of observed and predicted SOC from EPO (penetrometer) transformed VisNIR spectra on different days for all three sites. For spectroscopic measurement, predicted SOC was plotted for every 2 cm. For lab measurements, SOC of 10 cm homogenised depth samples and an additional 0-2 cm topsoil samples were plotted against depths…………….125
Figure 4.15. Residuals of estimated soil organic carbon (SOC) content for different wetness of the soil ……………………………………………………………………………………………...126
Figure 4.16. Comparisons of predicted SOC stocks from the penetrometer and actual SOC stocks from laboratory measurements. Dotted black line and the blue line indicate the 1:1 line and the actual trend in the model, respectively……………………………………………………………..128
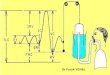
Figure 5.1 (a) Schematic diagram; and (b) Actual setup of Adafruit VL6180X ToF and DS18B20 temperature sensor coupled with Arduino Uno R3 that includes a liquid-crystal display to track the progress of the measurements…………………………………………………………..146
Figure 5.2 Adafruit VL6180X ToF Distance sensor………………………………………………..147
Figure 5.3 Working mechanism of ToF distance sensor…………………………………………….147
Figure 5.4 (a) Hydrometer with styrofoam cap; and (b) Stability check of Adafruit VL6180X Time of Flight Distance (ToF) sensor……………………………………………………………….148
Figure 5.5. The setup of automated hydrometer including Adafruit VL6180X (ToF) and DS18B20 temperature sensor with a hydrometer and measuring cylinder…………………………….151
Figure 5.6 Graph of hydrometer reading vs. time obtained from the automated hydrometer method for a clay loam………………………………………………………………………………….154
Figure 5.7 Percent mass finer and the diameter of soil samples obtained from the automated hydrometer method………………………………………………………………………....155
Figure 5.8 Comparison of % finer from Pipette vs. Automated Hydrometer Method Trial-1 and Trial-2 for the particle diameters of 2, 5, 10, 20 and 40 μm………………………………….…..156
Figure 5.9. Automated Hydrometer method Trial-1 vs. Trial-2 for the particle diameters of 2, 5, 10, 20 & 40 μm…………………………………………………………………………………….157
Figure 6.1. Propagations of P and S waveform through a 3D grid (after E. Onajite, 2014)…………172
Figure 6.2. Standard quick-mount Piezo Bender (Q220-A4-303YB) sensor that transmits shear wave velocity through the soil surface…………………………………………………………….175
Figure 6.3. Schematic diagram of the setup of the piezoelectric sensor probe system embedded in the soil in a glass beaker……………………………………………………………………..…175
Figure 6.4. Mechanism of wave propagation of 2-Layer Piezo-electric Bender and Extender elements between the transmitter and the receiver…………………………………………………….176

xvii
Figure 6.5. The closed system of the piezoelectric sensor…………………………………………..177
Figure 6.6. Arrival times calculated the distance between the trigger, and the first point when the sine wave starts to form for P wave and the intersection between the sine waves obtained from different polarities for S-wave………………………………………………………………178
Figure 6.7. Amplitude vs. travel time of output signal without applying low pass filter……………179
Figure 6.8. Optimized design parameters of low pass filter used in the closed system……………..180
Figure 6.9. Schematic diagram of low pass filter used in the closed system with piezoelectric sensor ……………………………………………………………………………………………...180
Figure 6.10. Improved output signal after applying low pass filter indicating the amplitude of S-wave against the travel time……………………………………………………………………….181
Figure 6.11. Comparison in the S-wave travel time between no vibratory compaction and vibratory compaction for 20 minutes………………………………………………………………….184
Figure 6.12. An empirical relationship between Shear wave (VS) travel time and bulk density of soil. ……………………………………………………………………………………………...186
Figure 6.13. An empirical relationship between Shear wave velocity (VS) and bulk density of soil...187
Figure 6.14. Comparisons between the actual and predicted bulk density of soil…………………..188
Figure 6.15. Empirical relationship between Shear wave velocity (VS) and Shear modulus (Gmax) of soil………………………………………………………………………………………..…190
Figure 6.16. Empirical relationship between Shear wave velocity (VS) and the Young modulus (E) of soil…………………………………………………………………………………………..191

xviii
LIST OF ABBREVIATIONS
3-D Three-Dimensional SOC Soil Organic Content
OC Organic Content
EMI Electromagnetic Induction
ECa Apparent Electrical Conductivity
VisNIR Visible and Near Infrared
PSD Particle Size Distribution
ToF Time of flight
NMM Neutron Moisture Meter
TDR Time Domain Reflectometry
GPR Ground-Penetrating Radar
PVC Polyvinyl Chloride
2-D Two-Dimensional VMC Volumetric Moisture Content
1-D One-Dimensional
RAW Readily Available Water
EMCIs EM Conductivity Images
ERT Electrical Resistance Tomography
PBI Plant Breeding Institute
EPO External Parameter Orthogonalisation
CEC Cation Exchange Capacity
RMSE Root Mean Square Error RMSEc Corrected Root Mean Square Error
SVM Support Vector Machine
PLSR Partial Least Squares Regression
LCCC Lin's Concordance Correlation Coefficient
USDA United States Department of Agriculture
FAO Food and Agriculture Organization
PTF Pedotransfer Function
ISO International Organization for Standardization
IR Infra-Red

xix
IEC International Electrotechnical Commission

1
CHAPTER 1
GENERAL INTRODUCTION

Chapter 1: General Introduction
2
1.1 Background
The nature of the agroecosystem vastly depends on soils, and soils are home to over one-fourth
of all living species on earth (Turbé et al., 2010). Soil acts as a water filter, a growing medium,
and provides essential nutrients to our forests and crops (Arkhipova et al., 2007; Truu, Nurk,
Juhanson, & Mander, 2005). Soil is the main source of food, fiber, and fuel (Lal, 2009, 2010).
Nevertheless, with the increasing population, it becomes challenging to ensure soil security
(Koch et al., 2013; A. McBratney, Field, & Koch, 2014). The biggest challenge is to manage
exponentially decreasing cultivable land and to produce more feed, fiber, food, and fuel with
less water, less energy, and fewer nutrient inputs (Powlson et al., 2011; Ramankutty et al.,
2018). To ensure soil can be used sustainably, we must develop new technologies and
techniques that can monitor soil conditions so we can optimise our non-renewable resources to
produce food for this world's entire population.

Chapter 1: General Introduction
3
Figure 1.1 Spatial variability of soil across the cropping field in Lansdowne Farm, Sydney,
New South Wales.
However soil is not uniform everywhere, the state or condition of soil changes rapidly with
space and time, making it challenging to manage soil resources effectively for agricultural
purposes (Stenberg, Rossel, Mouazen, & Wetterlind, 2010). Figure 1.1 shows the soil at three
locations marked 1, 2, and 3 in a field in Landsdowne, near Sydney. The distance between site
2 and 3 is 170 m and 560 m from site 1. Within this small distance, extraordinary horizontal
and vertical soil variability was observed. To manage soil in precision, we need to know how
soil changes not only along the horizontal axis but also vertically, along the soil profile.
The variability of soil physical properties along the depths has a significant contribution to the
soil resources management and environmental ecosystem (Ovalles & Collins 1986). While

Chapter 1: General Introduction
4
digital soil mapping of soil in 3-D has been achieved at a regional and continental scale, the
fine-scale variation in a field cannot be captured. We need to find better solutions to map the
fine-scale variation of soil.
Among important soil properties that need to be monitored and measured accurately are soil
moisture content and soil carbon content. Monitoring soil moisture at different depths will
allow us to understand soil–water–plant system so that irrigation water can be applied more
efficiently (Mubarak et al. 2009). Also, measuring soil organic content (SOC) stock at various
depth with enable us to calculate carbon stock accurately (Post & Kwon, 2000). So, it is
necessary to regularly monitor temporal soil variability, which requires analysing soil samples
to measure various soil properties with sufficient precision within a specific time interval.
1.2 Visualisation of research topics on soil properties in agriculture
A keyword density visualisation analysis was done among the recent scientific literature on
different agricultural soil properties essential for optimising natural resources and maximising
crop yield. This analysis was done by word clustering of 1772 relevant articles, conference
papers, and book chapters published over the past five years. The abstract, author keywords
and index keywords were exported from the SCOPUS database and used for this word
clustering.

Chapter 1: General Introduction
5
Figure 1.2 Density visualisation of keywords from word clustering relevant research
documents using VOSviewer (v1.6.15) (Van Eck & Waltman, 2010)
VOSviewer (v1.6.15) was used to cluster the occurrence of the various words within the
abstracts, keywords, and co-occurrence between the words for density visualisation, as shown
in Figure 1.2 (Van Eck & Waltman, 2010, 2011). This analysis showed that soil moisture and
organic carbon (OC) appeared most of the time among all other soil properties in agricultural
soil research articles. It indicates that these two soil properties significantly contribute to
optimal natural soil resource management and crop production.
Primary keywords such as land-use change, enzyme activity, saturated hydraulic conductivity,
clay content, etc. relevant soil properties can be observed around the OC keyword. SOC has a
direct influence on these properties. Soil moisture is the second most researched topic in
agriculture after OC. Soil moisture is the most crucial resource that needs the most attention

Chapter 1: General Introduction
6
for semi-arid countries like Australia (Noble, 1998). Figure 1.1 shows the nearby soil moisture
keywords are irrigation, rain, runoff, etc., which have a direct relationship with soil moisture.
In the middle of the density visualisation, crop production can be found, which indicates it is
related to both OC and soil moisture. This keyword analysis shows the importance of these
two topics for sustaining agricultural production.
1.3 Statement of problem
Conventional methods for determining physical soil properties in the laboratory are time-
consuming, expensive, and tedious. Field methods for measuring these soil properties are
destructive in nature, and often the sphere of influence (measurement volume) is relatively
small. In precision agriculture, the necessity of high-resolution soil information with spatial
variability that can be obtained rapidly and conveniently is highly needed (Behrens & Scholten
2006; Camera et al. 2017; McBratney et al. 2003). Lateral and vertical soil data with high
resolution is essential for plant breeding (Niazian & Niedbała, 2020), phenotyping (Stahl,
Wittkop, & Snowdon, 2020), crop and yield modelling (Liu et al. 2007; Semenov 2004;
Viscarra Rossel et al. 2010; Zhao et al. 2020).
This thesis aims to develop novel, cost-effective systems to provide high-resolution soil data,
in particular:
- Field measurement of 3-D soil water dynamics at the plot level,
- Field measurement of soil carbon with depth at a very fine interval,
- Developing a new sensor to measure soil bulk density,
- Developing an efficient way to automate the measurement of particle-size distribution.

Chapter 1: General Introduction
7
1.3.1 Soil moisture analysis
In recent years, drought has become one of the major environmental stresses in many
continents, and it is an extremely crucial abiotic factor that limits plant growth and crop
production. (Fathi & Tari, 2016; Hasanuzzaman, Nahar, Gill, & Fujita, 2013). It is more
surprising that only 10 percent of the world's cultivable land is free from environmental stresses
(Fathi & Tari, 2016). To reduce the effect of drought stress, it is essential to understand drought
tolerance and the dynamics of how water is extracted from soil extraction by plants.
Conventional methods for measuring soil moisture are limited to point measurements (i.e., soil
moisture sensing probes), which have a considerably low sphere of influence. These probes
can measure soil moisture up to a certain depth, but it is impractical, tedious, and expensive if
the sensors need to be installed across the whole cropping field. The ability to measure soil
properties at the plot level on a meaningful scale is limited (Reynolds & Tuberosa 2008). So,
it is not easy for plant-breeders to conduct drought-tolerant and effective water use related
research using point-scale observing methods (Blum 2005). Thus, it is crucial to monitor soil
water change accurately at the plot scale with the high vertical resolution, to choose the
genotypes of different crops that can extract water from more in-depth soil profiles.
Phenotyping is a vital bottleneck for genotyping discovery and molecular markers'
development (Roitsch et al., 2019). Within the past few decades, the research on sensor
technologies' applications in the phenotyping methods has increased. The sensor-based plant
phenotyping approach is important for genotype x environment x management interactions in
germplasm screening and precision agriculture (Antille, Lobsey, McCarthy, Thomasson, &
Baillie, 2018; Roitsch et al., 2019). So, it is essential to introduce a new technique to phenotype
plant roots in the field. The current direct method involving the excavation of roots is time-
consuming and tedious (Whalley et al., 2017). Alternatively, monitoring plant roots' activities
can help to phenotype plant roots directly in the field (Blouin et al., 2005).

Chapter 1: General Introduction
8
This thesis will develop a measurement system based on Electromagnetic Induction (EMI)
surveys to survey the whole field rapidly and cost-effectively with high lateral and vertical
resolution. The survey aims to record ECa at different heights above ground so they can be used
to produce high-resolution 3-dimensional soil moisture maps for the whole cropping field.
These high-resolution data over lateral and vertical dimensions can serve as a tool for plant
phenotyping.
1.3.2 Soil organic carbon analysis
The chemical composition and biological productivity, fertility, and nutrient holding capacity
of a soil depend on organic carbon (Bhogal, Nicholson, & Chambers, 2009). So, plant growth
and overall agricultural productivity are highly influenced by SOC. Moreover, SOC plays a
major role in the global carbon cycle. Soil carbon sequestration can potentially slow down
global warming (Fornara et al., 2011).
Soil carbon is highly variable spatially (both horizontal and vertical) across the cropping field.
In particular, soil carbon concentration drops rapidly with depth. Taking bulk soil samples (e.g.,
0-30 cm) would miss the detail on how soil carbon varies significantly within the topsoil.
Conventionally soil cores are collected from the field and tested in the laboratory for measuring
SOC using combustion methods or the Walkley-Black method. Recently, visual and Near-
infrared (VisNIR) spectroscopy was used to predict soil organic carbon with high precision
(Morellos et al., 2016; Nocita et al., 2014; Stevens, Nocita, Tóth, Montanarella, & van
Wesemael, 2013; Stockmann et al., 2015). This technique does not involve time-consuming
and tedious laboratory analysis, but soil samples need to be scanned using the NIR spectrometer
to predict soil. For this reason, there are many ongoing pieces of research related to on-the-go
in-situ VisNIR measurements for predicting soil properties (Ben-Dor et al. 2008; Rossel et al.
2009; Chang et al. 2011; Kodaira & Shibusawa 2013; Poggio et al. 2015; Ackerson et al. 2017).

Chapter 1: General Introduction
9
However, most field analysis involves manually digging or coring the soils, obtaining the soil
sample, and then scanning the soils with VisNIR. Such manual measurement is time-
consuming and taking soil cores out from the soil will disturb the soil.
In this thesis, a VisNIR penetrometer system that is capable of recording soil VisNIR spectra
with the depth of measurements was introduced. This system is developed as a solution to
replacing conventional laboratory tests for measuring SOC. It can be used as a rapid, robust
and cost-effective system for in-situ high-resolution SOC in three dimensions that can
potentially benefit disciplines such as precision agriculture, carbon accounting, digital soil
mapping, etc.
1.3.3 Using Cheap sensors to analyse soil physical properties
Precision agriculture requires measuring soil physical properties at small scales throughout the
cropping field. Often it is challenging to evaluate soil physical properties at a reasonable scale
using conventional methods because most of those methods are expensive, time-consuming,
and invasive. Electromagnetic induction (EMI) surveys can be a potential solution for
determining soil variability across the field cost-effectively. Studies such as Castrignano et al.
(2012) & Benedetto et al. (2010, 2012) showed that EMI data can be calibrated to produce
maps of clay or sand content. Thus, actual soil analysis is still necessary to confirm or calibrate
specific soil characteristics such as particle size distribution (PSD), bulk density, stiffness
moduli, etc.
Soil physical properties such as particle size distribution, stability, etc. also belong to the
popular research topics according to the density visualisation (Figure 1.2). For precsion
agriculture, soil PSD and bulk density are often required as inputs in crop modelling.

Chapter 1: General Introduction
10
Particle size distribution analysis
Particle size distribution is one of the key parameters used for evaluating the quality of soil in
precision agriculture. Conventional laboratory methods, i.e., hydrometer and pipette methods
for measuring soil particle size distribution, are time-consuming, tedious, and involve a high
possibility of human error. Also, these methods are not capable of generating continuous
particle size distribution. Continuous particle size distribution indicates pore spaces within soil
particles, hydraulic conductivity, water retention & absorption capacity, etc. (Shiozawa and
Campbell, 1991; Hajnos et al., 2006; Slawinski et al., 2006; Ryżak and Bieganowski, 2011;
Yang et al., 2019). X-ray, γ-ray attenuation, and laser diffraction techniques can produce
continuous particle size distribution, but these are very expensive and comparatively
complicated to operate (Ferro and Mirabile, 2009). So, it becomes necessary to develop a
technique that can measure soil particle size and produce continuous particle size distribution
with sufficient precision. In this study, an automated hydrometer testing method using the time
of flight (ToF) distance sensor and digital temperature sensor was introduced, which is easy to
operate, cost-effective, and capable of producing soil continuous particle size distribution.
Bulk density and stiffness moduli analysis
Compaction, porosity, penetration resistance, structural integrity, and water storage capacity of
the soil are closely related to the bulk density and stiffness moduli (Kramer & Boyer, 1995;
Arshad & Martin, 2002; Adhikari et al., 2014). These strength properties also provide
information about seed germination and root penetrability through soil layers (Bengough et al.,
2005). Bulk density is required in soil carbon accounting, converting the gravimetric
measurement into soil carbon stock.

Chapter 1: General Introduction
11
Traditional methods for measuring bulk density is time-consuming, tedious, overall expensive,
and, most importantly, destructive in nature. In this study, soil bulk density was evaluated from
shear wave velocity measurements using the piezoelectric extender and bender elements.
1.4 Thesis objectives
This thesis's main objective is to develop cost-effective measurement systems for measuring
3-dimensional high-resolution soil physical properties with good accuracy. The aims of this
thesis are given below,
• To develop technologies to monitor soil variability and changes in space and time for
application in precision agriculture.
• To measure soil properties rapidly, cost-efficiently, and accurately using non-
destructive techniques in the field.
• To establish robust measuring techniques for increasing the measurements'
repeatability and reproducibility.
• To develop measurement techniques using cheap sensors to predict soil physical
properties more conveniently with high accuracy in the laboratory.
Specifically, Chapter 2 looks at developing a crop water use monitoring system at the plot level
using a plastic buggy system based on the EMI surveys. The proposed system was used to
monitor soil moisture at different depths to quantify total water uses by 36 chickpea genotypes
using fortnightly EMI surveys throughout the growing season. The total water uses by different
chickpea genotypes were validated against the total water uses obtained from Neutron Moisture
Meter (NMM) measurements.

Chapter 1: General Introduction
12
Chapter 3 includes the depth-specific temporal analyses of soil water extraction by different
genotypes of chickpeas using EMI surveys for chickpea variety trails in 2018 and 2019. This
chapter explains the potential use of the proposed soil water moisture measuring technique
using EMI surveys for grouping most and least water use efficient chickpea genotypes at
various depths and different growth stages. This technique also analyses the depth profile of
cumulative water uses by the most and least water-efficient genotype for different growth
stages. Overall, this chapter focuses on the possible use of this EMI based plastic buggy system
to analyse soil water extraction by the roots of chickpeas at various depth and growth stages.
Chapter 4 includes a VisNIR penetrometer system with an ultrasonic depth sensor for
measuring SOC using high-resolution in-situ spectra. The effectiveness of the penetrometer
system to record soil spectra with depths from three different sites for predicting the SOC was
tested. The predicted SOC was validated against the SOC measured in the laboratory and
compared with the SOC measured from soil cores using contact probes. The potential of
VisNIR penetrometer system as an alternative to the conventional method for predicting SOC
is discussed in this chapter.
Chapter 5 contains a proposed automated hydrometer method for soil particle size analysis
using Adafruit VL6180X ToF distance sensor and DS18B20 1-Wire digital temperature sensor.
This chapter's main objective is automatically recording hydrometer readings and suspension
temperature every 5 seconds that allows calculating percentages of sands, silt, and clays with
a continuous particle-size distribution curve conveniently and cost-effectively with higher
accuracy.
Chapter 6 focuses on measuring bulk density and soil stiffness moduli from shear wave velocity
using piezoelectric benders and extenders. The efficiency of piezoelectric sensors to produce
shear wave velocity in the soil particles were examined. The study tested the possibility of

Chapter 1: General Introduction
13
using shear wave velocity of soil to measure bulk density, Shear, and Young moduli rapidly
and cost-effectively.

Chapter 1: General Introduction
14
1.5 References
Ackerson, J. P., Morgan, C. L. S., & Ge, Y. (2017). Penetrometer-mounted VisNIR
spectroscopy: Application of EPO-PLS to in situ VisNIR spectra. Geoderma, 286,
131–138.
Adhikari, K., Hartemink, A. E., Minasny, B., Kheir, R. B., Greve, M. B., & Greve, M. H.
(2014). Digital mapping of soil organic carbon contents and stocks in Denmark. PloS
One, 9(8), e105519.
Antille, D. L., Lobsey, C. R., McCarthy, C. L., Thomasson, J. A., & Baillie, C. P. (2018). A
review of the state of the art in agricultural automation. Part IV: Sensor-based nitrogen
management technologies. In 2018 ASABE Annual International Meeting (p. 1).
American Society of Agricultural and Biological Engineers.
Arkhipova, T. N., Prinsen, E., Veselov, S. U., Martinenko, E. V, Melentiev, A. I., &
Kudoyarova, G. R. (2007). Cytokinin producing bacteria enhance plant growth in
drying soil. Plant and Soil, 292(1–2), 305–315.
Behrens, T., & Scholten, T. (2006). Digital soil mapping in Germany—a review. Journal of
Plant Nutrition and Soil Science, 169(3), 434–443.
Ben-Dor, E., Heller, D., & Chudnovsky, A. (2008). A novel method of classifying soil profiles
in the field using optical means. Soil Science Society of America Journal, 72(4),
1113–1123.
Bengough, A. G., Bransby, M. F., Hans, J., McKenna, S. J., Roberts, T. J., & Valentine, T. A.
(2005). Root responses to soil physical conditions; growth dynamics from field to cell.
Journal of Experimental Botany, 57(2), 437–447.
Bhogal, A., Nicholson, F. A., & Chambers, B. J. (2009). Organic carbon additions: effects on

Chapter 1: General Introduction
15
soil bio‐physical and physico‐chemical properties. European Journal of Soil Science,
60(2), 276–286.
Blouin, M., Zuily‐Fodil, Y., Pham‐Thi, A., Laffray, D., Reversat, G., Pando, A., Lavelle, P.
(2005). Belowground organism activities affect plant aboveground phenotype,
inducing plant tolerance to parasites. Ecology Letters, 8(2), 202–208.
Blum, A. (2005). Drought resistance, water-use efficiency, and yield potential—are they
compatible, dissonant, or mutually exclusive? Australian Journal of Agricultural
Research, 56(11), 1159–1168.
Camera, C., Zomeni, Z., Noller, J. S., Zissimos, A. M., Christoforou, I. C., & Bruggeman, A.
(2017). A high resolution map of soil types and physical properties for Cyprus: A
digital soil mapping optimization. Geoderma, 285, 35–49.
Fathi, A., & Tari, D. B. (2016). Effect of drought stress and its mechanism in plants.
International Journal of Life Sciences, 10(1), 1–6.
Ferro, V., & Mirabile, S. (2009). Comparing particle size distribution analysis by sedimentation
and laser diffraction method. Journal of Agricultural Engineering, 40(2), 35–43.
Fornara, D. A., Steinbeiss, S., McNamara, N. P., Gleixner, G., Oakley, S., Poulton, P. R.,
Bardgett, R. D. (2011). Increases in soil organic carbon sequestration can reduce the
global warming potential of long‐term liming to permanent grassland. Global Change
Biology, 17(5), 1925–1934.
Hajnos, M., Lipiec, J., Świeboda, R., Sokołowska, Z., & Witkowska-Walczak, B. (2006).
Complete characterization of pore size distribution of tilled and orchard soil using
water retention curve, mercury porosimetry, nitrogen adsorption, and water desorption
methods. Geoderma, 135, 307–314.
Hasanuzzaman, M., Nahar, K., Gill, S. S., & Fujita, M. (2013). Drought stress responses in

Chapter 1: General Introduction
16
plants, oxidative stress, and antioxidant defense. Climate Change and Plant Abiotic
Stress Tolerance, 209–250.
Koch, A., McBratney, A., Adams, M., Field, D., Hill, R., Crawford, J., O’Donnell, A. (2013).
Soil security: solving the global soil crisis. Global Policy, 4(4), 434–441.
Kodaira, M., & Shibusawa, S. (2013). Using a mobile real-time soil visible-near infrared sensor
for high resolution soil property mapping. Geoderma, 199, 64–79.
Kramer, P. J., & Boyer, J. S. (1995). Water relations of plants and soils. Academic press.
Lal, R. (2009). Ten tenets of sustainable soil management. Journal of Soil and Water
Conservation, 64(1), 20A-21A.
Lal, R. (2010). Managing soils for a warming earth in a food‐insecure and energy‐starved
world. Journal of Plant Nutrition and Soil Science, 173(1), 4–15.
Liu, J., Williams, J. R., Zehnder, A. J. B., & Yang, H. (2007). GEPIC–modelling wheat yield
and crop water productivity with high resolution on a global scale. Agricultural
Systems, 94(2), 478–493.
McBratney, A. B., Santos, M. L. M., & Minasny, B. (2003). On digital soil mapping.
Geoderma, 117(1–2), 3–52.
McBratney, A., Field, D. J., & Koch, A. (2014). The dimensions of soil security. Geoderma,
213, 203–213.
Morellos, A., Pantazi, X.-E., Moshou, D., Alexandridis, T., Whetton, R., Tziotzios, G.,
Mouazen, A. M. (2016). Machine learning based prediction of soil total nitrogen,
organic carbon and moisture content by using VIS-NIR spectroscopy. Biosystems
Engineering, 152, 104–116.
Mubarak, I., Mailhol, J. C., Angulo-Jaramillo, R., Bouarfa, S., & Ruelle, P. (2009). Effect of

Chapter 1: General Introduction
17
temporal variability in soil hydraulic properties on simulated water transfer under
high-frequency drip irrigation. Agricultural Water Management, 96(11), 1547–1559.
Mubarak, I., Mailhol, J. C., Angulo-Jaramillo, R., Ruelle, P., Boivin, P., & Khaledian, M.
(2009). Temporal variability in soil hydraulic properties under drip irrigation.
Geoderma, 150(1–2), 158–165.
Niazian, M., & Niedbała, G. (2020). Machine Learning for Plant Breeding and Biotechnology.
Agriculture, 10(10), 436.
Noble, J. C. (1998). The Delicate and Noxious Scrub: CSIRO Studies on Native Tree and
ShrubProliferation in the Semi-Arid Woodlands of Eastern Australia. Csiro
Publishing.
Nocita, M., Stevens, A., Toth, G., Panagos, P., van Wesemael, B., & Montanarella, L. (2014).
Prediction of soil organic carbon content by diffuse reflectance spectroscopy using a
local partial least square regression approach. Soil Biology and Biochemistry, 68,
337–347.
Ovalles, F. A., & Collins, M. E. (1986). Soil‐landscape relationships and soil variability in
north central Florida. Soil Science Society of America Journal, 50(2), 401–408.
Poggio, M., Brown, D. J., & Bricklemyer, R. S. (2015). Laboratory-based evaluation of optical
performance for a new soil penetrometer visible and near-infrared (VisNIR) foreoptic.
Computers and Electronics in Agriculture, 115, 12–20.
Post, W. M., & Kwon, K. C. (2000). Soil carbon sequestration and land‐use change: processes
and potential. Global Change Biology, 6(3), 317–327.
Powlson, D. S., Gregory, P. J., Whalley, W. R., Quinton, J. N., Hopkins, D. W., Whitmore, A.
P., Goulding, K. W. T. (2011). Soil management in relation to sustainable agriculture
and ecosystem services. Food Policy, 36, S72–S87.

Chapter 1: General Introduction
18
Ramankutty, N., Mehrabi, Z., Waha, K., Jarvis, L., Kremen, C., Herrero, M., & Rieseberg, L.
H. (2018). Trends in global agricultural land use: implications for environmental
health and food security. Annual Review of Plant Biology, 69, 789–815.
Reynolds, M., & Tuberosa, R. (2008). Translational research impacting on crop productivity
in drought-prone environments. Current Opinion in Plant Biology, 11(2), 171–179.
Roitsch, T., Cabrera-Bosquet, L., Fournier, A., Ghamkhar, K., Jiménez-Berni, J., Pinto, F., &
Ober, E. S. (2019). New sensors and data-driven approaches—A path to next
generation phenomics. Plant Science, 282, 2–10.
Rossel, R. A. V., Cattle, S. R., Ortega, A., & Fouad, Y. (2009). In situ measurements of soil
colour, mineral composition and clay content by vis–NIR spectroscopy. Geoderma,
150(3–4), 253–266.
Ryżak, M., & Bieganowski, A. (2011). Methodological aspects of determining soil particle‐
size distribution using the laser diffraction method. Journal of Plant Nutrition and Soil
Science, 174(4), 624–633.
Semenov, M. A. (2004). Using weather generators in crop modelling. In VII International
Symposium on Modelling in Fruit Research and Orchard Management 707 (pp. 93–
100).
Shiozawa, S., & Campbell, G. S. (1991). On the calculation of mean particle diameter and
standard deviation from sand, silt, and clay fractions. Soil Science, 152(6), 427–431.
Stahl, A., Wittkop, B., & Snowdon, R. J. (2020). High-resolution digital phenotyping of water
uptake and transpiration efficiency. Trends in Plant Science.
Stenberg, B., Rossel, R. A. V., Mouazen, A. M., & Wetterlind, J. (2010). Visible and near
infrared spectroscopy in soil science. In Advances in agronomy (Vol. 107, pp. 163–
215). Elsevier.

Chapter 1: General Introduction
19
Stevens, A., Nocita, M., Tóth, G., Montanarella, L., & van Wesemael, B. (2013). Prediction of
soil organic carbon at the European scale by visible and near infrared reflectance
spectroscopy. PloS One, 8(6), e66409.
Stockmann, U., Padarian, J., McBratney, A., Minasny, B., de Brogniez, D., Montanarella, L.,
… Field, D. J. (2015). Global soil organic carbon assessment. Global Food Security,
6, 9–16.
Truu, J., Nurk, K., Juhanson, J., & Mander, Ü. L. O. (2005). Variation of microbiological
parameters within planted soil filter for domestic wastewater treatment. Journal of
Environmental Science and Health, 40(6–7), 1191–1200.
Turbé, A., De Toni, A., Benito, P., Lavelle, P., Lavelle, P., Camacho, N. R., … Mudgal, S.
(2010). Soil biodiversity: functions, threats and tools for policy makers.
Van Eck, N. J., & Waltman, L. (2010). Software survey: VOSviewer, a computer program for
bibliometric mapping. Scientometrics, 84(2), 523–538.
Van Eck, N. J., & Waltman, L. (2011). Text mining and visualization using VOSviewer. ArXiv
Preprint ArXiv:1109.2058.
Viscarra Rossel, R., McBratney, A., & Minasny, B. (2010). Proximal soil sensing.
Whalley, W. R., Binley, A., Watts, C. W., Shanahan, P., Dodd, I. C., Ober, E. S., …
Hawkesford, M. J. (2017). Methods to estimate changes in soil water for phenotyping
root activity in the field. Plant and Soil, 415(1–2), 407–422.
Zhao, Y., Potgieter, A. B., Zhang, M., Wu, B., & Hammer, G. L. (2020). Predicting wheat yield
at the field scale by combining high-resolution Sentinel-2 satellite imagery and crop
modelling. Remote Sensing, 12(6), 1024.

20
CHAPTER 2
DEVELOPMENT OF A CROP WATER USE MONITORING
SYSTEM AT THE PLOT LEVEL

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
21
2.1 Summary
Monitoring soil water use at the plot level is essential for studying the plant’s response to
drought or irrigation. Soil electromagnetic induction (EMI) surveys can be a rapid, convenient,
and non-invasive solution for investigating soil moisture at the plot level. In this study, a crop
water use monitoring system for the plot level was developed using an EMI instrument that
collects measurements at 0, 20, 40, 60, and 80 cm above the ground surface on a plastic buggy.
The method was tested on a field trial of 36 chickpea genotypes maintained under
supplementary irrigation and rainfed conditions on a vertosol soil. After inverting the EMI data
to bulk soil electrical conductivity (ECa), the measurements were calibrated to soil moisture
contents using volumetric moisture contents of soil cores to the depth of 1.5 m. The R2 was
found to be 0.86. Approximately ±1 mS m-1 average drift within the ECa measurements was
detected. Standard deviation and coefficient of variation vary between 0.84 to 3.45 mS m-1 and
1.54 % to 9.26 % within a change in the daily temperature from 25.5 °C to 34 °C. This plastic
buggy system was used to measure the water use efficiency of chickpea genotypes over the
whole season. Total water use obtained from EMI surveys is highly correlated with values
obtained from Neutron Moisture Meter (NMM) (R2 = 0.73). In conclusion, the EMI survey
using the plastic buggy system is an efficient and rapid soil moisture measurement technique
at the plot level.
2.2 Introduction
Drought is one of the most critical environmental stresses for plants in many parts of the world,
especially in warm and dry areas (Pourdad & Beg, 2003). Crop production is severely
constrained by drought with yields of major cereal and grain legume crops dependent upon
water availability (Blessing et al., 2018; Sadras and Angus, 2006). In addition, up to 50%
reduction in yield can occur under drought stress due to low humidity and high

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
22
evapotranspiration (Alghabari, Ihsan, Hussain, Aishia, & Daur, 2015; Sehgal et al., 2017). To
identify, understand drought tolerance mechanisms in plants and phenotype water use traits in
crop breeding programs, it is essential to monitor soil water content at different depths and their
dynamics. Moreover, in experimental plots, water use efficiency, a trait typically selected for
improvement in breeding programs for yield under water-limited conditions (Bramley et al.,
2013) has traditionally been determined by monitoring the soil water content in pots and
lysimeter-type systems (Meissner, Rupp, & Haselow, 2020) or from limited measurements
using probes at different soil depths and gravimetrically (Siddique et al., 2001; Pascual-Seva
et al. 2018). To avoid confounding pot effects and planting density, measurements should be
conducted in the field where roots penetrate undisturbed soil profiles. However, this type of
soil moisture monitoring was considered impractical by plant breeders (Blum, 2005; Reynolds
& Tuberosa, 2008). This is because conventional methods for measuring volumetric water
content such as Time Domain Reflectometry (TDR) probes (Roth, Schulin, Flühler, & Attinger,
1990; Topp, Davis, & Annan, 1980), Ground-Penetrating Radar (GPR) (Huisman et al. 2003;
Klotzsche et al. 2018), capacitance probes (Kelleners, Robinson, Shouse, Ayars, & Skaggs,
2005; Kizito et al., 2008), Neutron Moisture Meter (NMM) (W. Gardner & Kirkham, 1952),
and soil electrical resistivity tomography (Kemna, Vanderborght, Kulessa, & Vereecken, 2002;
Loke, Chambers, Rucker, Kuras, & Wilkinson, 2013; Samouëlian, Cousin, Tabbagh, Bruand,
& Richard, 2005) are labour intensive or cost-prohibitive. In addition, not all of the methods
are suitable for plot-scale moisture monitoring (Long, Wraith, & Kegel, 2002; Lunt, Hubbard,
& Rubin, 2005; Petropoulos, Griffiths, Dorigo, Xaver, & Gruber, 2013) (Table 2.1).

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
23
Table 2.1 Summary of comparisons of different methods for monitoring soil moisture Po
tent
ial o
f au
tom
ated
m
easu
rem
ents
via
data
logg
er
Req
uire
au
tono
mou
s ro
bots
via
data
logg
er
Impr
actic
al
Req
uire
au
tono
mou
s ro
bots
Req
uire
au
tono
mou
s ro
bots
Impr
actic
al
Impr
actic
al
Nat
ure
of
the
test
Inva
sive
Non
-Inva
sive
Inva
sive
Inva
sive
Inva
sive
Non
-Inva
sive
Inva
sive
Inva
sive
Mea
sure
men
t tim
e pe
r sa
mpl
e
0.33
seco
nd
- 10
mill
iseco
nds
15-6
0 se
cond
s
- - -
24-3
0 ho
urs
Initi
al c
ost
Hig
h
Hig
h
Low
- m
ediu
m
Hig
h
Hig
h (1
1.50
0 U
S$ )
Hig
h
Hig
h
Low
Res
olut
ion
(% V
MC
)
0.1 -
0.1-
0.2
- - - - -
Wor
king
te
mpe
ratu
re
-30
to +
60°C
-10
to 5
0°C
0 to
+50
°C
0 to
+60
ºC
-
-30
to +
50°C
-5 to
+50
°C
-
Acc
urac
y
0.01
m3 m
-3
0.01
01 to
0.1
612
m3 m
-3
0.00
08 m
3 m-3
0.08
3 m
3 m-3
0.1
cm3 /c
m3
± 0.
1%
1 %
0.00
1 g
Max
imum
dep
th
of m
easu
rem
ent
1m
0.75
m
-
3 m
eter
s or m
ore
10 to
80c
m
0.75
m-3
m
2m
Up
to 1
0m
Mea
sure
men
t si
ze, S
pher
e of
in
fluen
ce
~10c
m
~ 0.
5-30
m
~ 4c
m
~ 15
-50c
m
~ 30
0 m
~ 1m
~ 0.
5m-1
m
~ 2-
10 c
m
Prin
cipl
es
Vel
ocity
mea
sure
men
t of
a h
igh-
frequ
ency
si
gnal
, die
lect
ric
cons
tant
Scat
terin
g of
hig
h-fre
quen
cy p
ulse
d el
ectro
mag
netic
(EM
) w
aves
Soil
Capa
cita
nce,
soil
diel
ectri
c co
nsta
nt
Neu
tron
Scat
terin
g
He
neut
ron
dete
ctor
co
unts
cos
mic
-ray
neut
rons
Elec
trica
l con
duct
ivity
of
soil
Elec
trica
l res
istiv
ity o
f so
il
Dire
ct m
easu
rem
ent o
f so
il m
oistu
re
Prop
ertie
s
Tim
e-do
mai
n re
flect
omet
ry
(TD
R) p
robe
Gro
und-
pene
trat
ing
rada
r (G
PR)
Cap
acita
nce
prob
es
Neu
tron
pro
bes
Cos
mic
-ray
ne
utro
n pr
obes
Ele
ctro
mag
netic
in
duct
ion
(EM
I)
Soil
elec
tric
al
resi
stiv
ity
tom
ogra
phy
Gra
vim
etri
c So
il W
ater
Con
tent

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
24
Table 2.1 shows a comparison of commonly used methods for soil moisture measurement
techniques. Most of the methods are invasive in nature. The TDR and capacitance probes have
a small effective measurement volume (few mm) (Dettmann & Bechtold, 2018) would not
represent an area where water is used by plants, depending on the application. While smaller
sensors such as TDR and FDR can be placed near roots, the small volume of measurement
means that many sensors are required at a plot scale to monitor crop water use (Kirkham 2005;
Sparks 2012).
Instead of relying on soil core sampling or various invasive measuring probes, measurement
of soil apparent electrical conductivity (ECa) using Electromagnetic Induction (EMI) surveys,
can be a potential solution as ECa is a function of soil moisture, clay content, salinity, cation
exchange capacity, etc. (Aragüés et al. 2010; Coppola et al. 2016; Li et al. 2013; Sudduth et al.
2003; Triantafilis & Lesch 2005). Using this technique, soil apparent electrical conductivity
(ECa) of a bulk volume of soil at different depths can be measured, which provides a cost-
effective and non-invasive solution for predicting and mapping soil water content.
EMI surveys have been used to predict soil moisture across ecosystem and catchment levels of
scale (Altdorff et al., 2017; Mallet, Carrière, Chalikakis, & Marc, 2018) and agricultural fields
comprising clay loams, medium clays, and homogenous sands (Huang et al. 2016; Huang et al.
2017). Using time-lapsed EMI surveys, changes in soil moisture conditions have been
estimated with reasonable accuracy. For example, Huang et al. (2016) developed a
spatiotemporal inversion algorithm, which accounted for the temporal continuity of ECa and
proved that the algorithm was more accurate and less biased as compared with non-
spatiotemporal techniques. This algorithm was used in a case study where time-lapse ECa was
collected on a 350 m transect for consecutive days.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
25
In contrast, the use of EMI as a monitoring tool for measuring soil water use at the plot scale
has received less attention. This is surprising given the urgent need to improve yields and yield
stability of many crop species to meet future demand under more extreme conditions and the
history of “water productivity” research in understanding crop adaptations to water-limited
environments. While pot and lysimeter studies have proven useful in identifying genetic
variation for various traits associated with or dependent on water use (Nicoară et al., 2014;
Octura, Gadiaware, & Octura, 2020; Tharanya et al., 2018), their translation to breeding
programs and new varieties has been limited by application to field conditions.
Albeit, predicting soil moisture from ECa measurements has not always been successful
(Altdorff, Galagedara, Nadeem, Cheema, & Unc, 2018; Robinson, Abdu, Lebron, & Jones,
2012) due to several factors that vary across fields and with environmental conditions. In this
study, the potential of EMI as a monitoring tool for soil water use has been demonstrated for
wheat (Blanchy et al., 2020; Shanahan et al., 2015) and chickpea (Foley & Boulton, 2015;
Subba et al., 2013).
Huang et al. (2018) measured plot scale soil moisture dynamics across a chickpea field using
time-lapsed ECa data from an EM38 sensor. Soil moisture dynamics and movements were
successfully predicted with good correlation with measured values (R2 of 0.87 and RMSE of
0.037 m3 m-3) and variation in water extraction at different soil depths were observed after a
rainfall event. However, that pilot study was conducted with manual observations using EMI
at several heights, which were very time-consuming. In that study, data were captured from
point measurements in the centre of each plot, which was not only tedious but does not
incorporate spatial variation. Such setup is not suitable for automation. In addition, soil water
contents were not determined directly for the calibration with ECa but were obtained using
neutron probe measurements on a subset of plots. It is possible that the aluminium access tube

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
26
for the neutron probe could have interfered with the EM38 sensor during measurements and
therefore, the method needs confirming with actual soil water contents.
This chapter developed a new data acquisition method for plot scale soil water monitoring
system using the EMI instrument. The system uses a plastic buggy that allows the EM38-MK2
instrument to take measurements at five different heights to measure soil water use up to 1 m
in the soil. This chapter will present the measurement system and examine the ECa
measurement's stability as affected by temperature. The system was used to evaluate the water
use of 36 chickpea genotypes grown on 288 plots over 10 weeks.
2.3 Materials and Methods
2.3.1 EMI system testing
Bulk soil electrical conductivity (ECa) measurements were captured using a ground
conductivity meter (EM38-MK2, Geonics Limited, Ontario, Canada). The EM38-MK2 uses
electromagnetic induction to determine ECa where the electromagnetic field generated by a
transmitting coil induces eddy currents when there are charged particles in the soil generating
their own electromagnetic field. A receiver coil measures the amplitude and phase of this
secondary electromagnetic field. The EM38-MK2 has two receiver coils, distanced 0.5 m and
1 m from the transmitter, enabling data capture for effective depths of 0.75 m and 1.5 m,
respectively.
After turning on the device and allowing it to warm up for 5 minutes, the battery level was
checked, and the device was calibrated according to the user manual. EMI measurements were
captured with both receiver coils at five different heights above the ground surface, 0, 20, 40,
60, and 80 cm. EMI measurements of these five different heights were coupled with an
inversion algorithm to provide ECa measurements 15, 35, 55, 75, 90, 110, 130, and 150 cm

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
27
below the ground surface. These depths encompass most of the physiological and biological
activities of plant roots and plant-soil interactions.
To test the stability and consistency of ECa measurements, the device was placed in the field
at the heights of 0, 20, 40, 60 and 80 cm above the ground and ECa readings were continuously
recorded for 6 minutes.
Although the EM38-MK2 includes temperature compensation circuitry, the effect of ambient
air temperature on the ECa measurements was tested to determine whether data capture would
be affected by temperature drift during the course of a day. The instrument was placed in the
field from 10:00 until 18:00, and ECa measurements were taken at 10:30, 12:00, 13:30, 15:00,
16:30 and 18:00 at heights of 0, 20, 40, 60 and 80 cm above the ground surface of 20 plots.
During this experiment, the ambient temperature varied from 25.5°C to 34°C.
2.3.2 The buggy system
To increase the throughput and record continuous ECa measurements across the entire field of
plots for each height above the ground, a customized buggy was constructed using inexpensive
off-the-shelf components available at any hardware store (Figure 2.1). All components of the
buggy were made of materials so that both quad-phase (conductivity) and in-phase (magnetic
susceptibility) measurements would not be affected.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
28
Figure 2.1 Customized plastic buggy for measuring soil ECa at 0, 20, 40, 60, and 80 cm above
the ground surface.
The buggy frame was made from 40 mm diameter PVC pressure pipe cut to relevant lengths
to span the plot (2 m between wheel tracks) and provide rigidity to the frame. The pipe was
joined together using PVC elbows and tee-pieces. Eight plastic-centre wheels with solid rubber
tyres (378 mm diameter, 50 mm wide) were connected to the frame, two wheels per leg that
were joined by an axle formed of plastic hose pipe and held in place by plastic ties. The EM
device was clamped to a piece of Perspex using plastic ties, and plastic chains were used to
adjust the device’s height above the ground surface as well as the position in the plot depending
on the crop’s row spacing. The plastic conduit prevented the EM device from swinging as it
moved through the plots. Plastic handles constructed of the same PVC pipe and fittings were
attached to the back of the buggy. The buggy rolled along the wheel tracks between plots,
pushed by one or two operators depending on the experiment.
2.3.3 Collection of EMI data
Measurements of the entire field were captured for a specific height above the soil surface,
starting at ground level. After starting the recording of the EMI data at the first plot, the buggy
system was pushed along the wheel tracks of each row of plots with the EM-device positioned
so that it passed between the central two plant rows of each plot. At the end of a row of plots,
the buggy was turned in the buffer region and then pushed back along the next row of plots.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
29
This procedure was repeated, collecting measurements of the entire field. The buggy was then
brought back to the first plot, the EM-device raised to the next height above the soil surface
and the procedure repeated until EMI data was collected for all five heights above the soil
surface. Soil ECa for each plot was recorded along with the internal device temperature and the
geographical coordinates.
Figure 2.2 Attachment of EM38-MK2 with customized plastic buggy
The raw EMI-data were recorded in a binary log (*.N38) format in a data logger (DAS70-
MESA2, Geonics Limited, Canada) connected to the EM-device via an RS-232 serial cable.
These data were then transferred to a computer and converted into DAT38 to extract the ECa
measurements with the coordinates using an open-source R package “em38” (EMTOMO,
2014).
2.3.4 Inversion of the EMI data
The EC data collected by the EM38 instrument was converted to ECa using the software
EM4Soil version 3.04 (Triantafilis & Santos, 2013) and using the S2 algorithm (Sasaki 2001).
The inversion was done to calculate ECa data to a depth of 1.5 m. A multi-layered 2-D inversion
technique was used to consider all the depths in the inversion analysis. For the 2-D inversion,

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
30
several input parameters are required, such as damping factor (λ), number of iterations, and
types of algorithms. Different λ were trialled to obtain minimum RMSE of the inversion results.
The optimum number of iterations was considered to be 20.
The inversion process produced estimates of soil ECa at 0.08, 0.15, 0.25, 0.35, 0.45, 0.55, 0.65,
0.75, 0.85, 0.95, 1.05, 1.15, 1.25, 1.35, 1.45, 1.55 and 1.65 m depth below ground surface. Soil
ECa was converted to volumetric moisture content (VMC) from the empirical correlation
between ECa data from EMI surveys and moisture content measured from soil cores.
2.3.5 Field trial on water use of chickpeas
A field trial was conducted to test the system during the 2018 growing season. The experiments
were done on an experimental farm of the Plant Breeding Institute of The University of Sydney
(30.3324° S, 149.7812° E), as shown in Figure 2.3.
Figure 2.3 Trial area divided into Rainfed and irrigated blocks
The trial area (180 m × 32 m) was divided equally into two blocks, each consisting of 144 plots
(1.6 m x 6 m) arranged in 12 runs and ranges. Each block was surrounded by two buffer rows.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
31
The southwest block (termed “irrigated”) was maintained with higher soil moisture content
throughout the season by supplementary irrigation, while the northwest block (termed
“rainfed”) only received supplementary irrigation until the crop’s reproductive stage when
terminal drought conditions developed due to low rainfall. Irrigation was applied
homogeneously to the field using a lateral move irrigator. In summary, the irrigated block
received 396 mm of water within the season and the rainfed block 251 mm.
A total of 36 different chickpea (Cicer arietinum L.) breeding lines and commercial cultivars
were sown in a randomised block design with four replicate plots per genotype and treatment
(irrigated and rainfed) on 1st June 2018, which falls within the recommended optimal sowing
window for northern New South Wales. The cultivar PBA Seamer was sown in the buffer plots.
Soil ECa was measured fortnightly, starting two weeks after sowing until maturity. ECa
measurements were taken for all 288 plots at the heights of 0, 20, 40, 60, and 80 cm above the
surface. In total 11 surveys were conducted on 14th June, 5th July, 23rd July, 1st August, 15th
August, 5th September, 13th September, 12th October, 26th October, 1st November and 9th
November 2018.
Water use by the plant was expressed as Evapotranspiration (ET), calculated using the plant
root zone water balance model as below,
ET = P + I –∆S (2.1)
Where,
ET = Evapotranspiration or water use by plants
∆S = Change in root zone soil water storage over the time period
P = Precipitation
I = Irrigation

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
32
The calculation was done from fortnightly data. Precipitation (P) was obtained from local
weather data, and irrigation (I) is based on the volume of water applied by the irrigator. The
change in soil moisture (ΔS) was calculated by successive subtraction of water content of
depths up to 100 cm (in m) at each fortnight with the initial soil moisture until the last fortnight
of measurement. Finally, total plant water use was calculated by summing all ET values from
planting to harvest (11 fortnights from 14th June to 9th November 2018).
To validate the water use obtained from the EMI surveys, total water use obtained from the
EMI surveys were compared with the total water use calculated using the measurement from
Neutron Moisture Meter (NMM) (CPN® 503DR Hydroprobe, CPN International, Concord,
CA, USA) on 40 plots within the study area. The plots represent 10 genotypes of chickpeas,
each with four replicates under rainfed and irrigated blocks. Aluminium access tubes installed
in these plots facilitated the collection of NMM readings at 0.1, 0.2. 0.3, 0.4, 0.5, 0.6, 0.8, 1.0
1.2 and 1.4 m depths. NMM measurements were recorded fortnightly, within a week after every
EMI survey. The universal calibration formula was used to convert the neutron counts into soil
volumetric water content (𝜃𝜃) (Carneiro & De Jong, 1985),
𝜃𝜃 = 𝑎𝑎 + 𝑏𝑏 .𝐶𝐶𝐶𝐶 (2.2)
Where,
𝜃𝜃 = Volumetric water content
a = Constant
b = Slope = (Neutron counts -7863)
CR = Count ratio =1/182.9

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
33
2.4 Results and Discussion
2.4.1 Environmental effects on EM measurements
The stability of EM38-MK2 and the effect of the ambient temperature on the device were
analysed. All the experiments were conducted in the same trial area at Plant Breeding Institute
(PBI), Narrabri.
2.4.1.1 Stability check of EM38-MK2
ECa of 0, 20, 40, 60 and 80 cm heights were measured for six minutes in the automatic
continuous mode. The plastic buggy was used to maintain the constant height above the ground
surface. From the two receiver coils, soil ECa at a depth of 15, 35, 55, 75, 90, 110, 130, and
150 cm was calculated and plotted against the time to observe the drifting of ECa within this
time. From Figure 2.4, it can be seen that, except at a depth of 35 cm, there was no considerable
drift in the measurements and the average drift is within ±1 mS m-1.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
34
Figure 2.4 Soil ECa vs. time for different depth below the ground surface
2.4.1.2 Temperature effect on EM38-MK2
Geonics Limited stated that EM38-MK2 has a coil technology that includes temperature
compensation circuitry. This technology was designed to improve on the drift related
temperature as compared with the previous versions of EM38. To check the efficiency of the
compensation circuitry, a temperature test was conducted in the same chickpea field at PBI
Narrabri. In the test, EMI surveys were done for 0, 20, 40, 60, and 80 cm heights were recorded
using the plastic buggy to measure the ECa of 15, 35, 55, 75, 90, 110, 130, and 150 cm below

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
35
the ground surface. At each of the heights, the continuous measurements of soil ECa were
recorded for 5 minutes using EM38-MK2. The device was kept switched on under the direct
sunlight for the period of testing.
Standard deviation and the Coefficient of Variation of ECa were measured for different depths
below the ground surface are shown in Table 2.2. Within the duration of the test, the ambient
temperature varied between 25.5°C to 34°C.
Table 2.2 Standard deviation and the Coefficient of Variation of the ECa at different depths
below the ground surface.
Depth (cm) 15 35 55 75 90 110 130 150
Standard Deviation (mS m-1) 3.45 2.45 2.14 1.39 0.90 0.84 1.29 2.10
Coefficient of Variation (%) 9.26 8.76 9.26 6.54 1.54 1.74 3.09 6.51
The standard deviation of the ECa of all the depths varied between 3.45 mS m-1 to 0.84 mS m-
1. The highest standard deviation was for 55 cm, and the lowest was observed for the depth of
110 cm below the ground surface. The coefficient of variation varied between 9.26 % to 1.54
% within the depth of 15 cm to 150 cm below the surface. Both standard deviation and
coefficient of variation are higher within the top layer of soil surface because of the far-field
effect of the electromagnetic waves (McNeill, 1992). The least standard deviation and the
coefficient of variation are measured at a depth of 90 cm, 110 cm, and 130 cm. At a depth of
150 cm, both standard deviation and the coefficient of variation is high due to the near field
effect of the EM38-MK2 (Heil & Schmidhalter, 2017; Owino, 2012)

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
36
Figure 2.5 shows the boxplots of all the ECa measurements recorded at different depths
throughout the day of the experiment. The recorded temperature at 10:30 am, 12:00 am, 1:30
pm, 3:00 pm, 4:30 pm and 6:00 pm were 25.5 °C, 26.4 °C, 28.3 °C, 29.0 °C, 34.0 °C and 32.3
°C respectively. Boxplots indicate soil ECa for sequential changes in the temperature
throughout the day. For most of the depths, a slight jump can be observed when the ambient
temperature decreased to 32.3°C after the peak temperature of 34°C. For the change in the
ambient temperature of the whole day (8.5 °C), the drift in the ECa measurements was 2-3 %
within different depths below the surface. This study indicates that a negligible amount of drift
in soil ECa can be observed due to the highest temperature of 34 °C. So, the temperature
compensation circuitry embedded in the EM38MK-2 works fine, at least up to a temperature
of 34 °C.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
37
Figure 2.5 Soil EMI vs. ambient temperature for different depth of soil
2.4.2 Calibration of the ECa data to soil moisture content
Soil ECa measurements were converted into soil moisture content using the calibration between
the soil ECa and VMC recorded from 15 plots in the field trial. For calibration, 1.5 m soil cores
were collected using a hydraulic core drill, and soil ECa data were recorded at 0, 20, 40, 60,
and 80 cm heights above the ground using the plastic buggy from the same plots. Soil VMC
was measured for every 10 cm segment of each soil core and compared with the inverted soil
ECa. A 1-D inversion algorithm was employed for the inversion of the ECa data measured at
different heights to generate the depth-specific electrical conductivity by using the cumulative
function of the electromagnetic field. This 1-D inversion algorithm was embedded in the

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
38
EM4Soil Version 3.04 (Santos, 2004). An initial model of 16 layers was applied with the depths
of 10, 20, 30, 40, 50, 60, 70, 80, 90, 100, 110, 120, 130, 140, 150 cm, and the last layer at
infinity. The calculated ECa data were compared with the volumetric moisture content
measured from the soil cores. A linear regression model was developed to convert the ECa
value to volumetric moisture content (VMC). Figure 2.6 shows the relationship between VMC
and ECa of soil from the linear regression model.
Figure 2.6 Calibration between VMC and ECa of soil
The following empirical equation was found from the regression analysis between ECa and
volumetric moisture content,
𝑉𝑉𝑉𝑉𝐶𝐶 = 0.2874𝐸𝐸𝐶𝐶𝑎𝑎 + 12.112 (2.3)

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
39
2.4.3 Field trial on water use efficiency of chickpea genotypes
Water use efficiency of all 36 chickpea genotypes was evaluated for the 288 plots of the field
trial. Total water use by different chickpea genotypes over the whole season was calculated
using the EMI survey data, and the results were compared with the water use from NMM.
2.4.3.1 Total water use of different chickpea genotypes
Total water use by different genotypes for both irrigated and rainfed plots over the whole
season (22 weeks), as calculated by the ECa survey, is shown in Figure 2.7. As thirty-six
genotypes of chickpeas were planted in four replicates on each treatment, each data represents
each genotype's mean water use under irrigated and rainfed conditions.
Figure 2.7 Total water uses in mm by different chickpea genotype
Figure 2.7 shows that the minimum and maximum water use by the chickpea genotypes planted
in the irrigated plots were 320.32 and 457.46 mm, respectively. Water uptake of the chickpea
genotypes in rainfed plots was lower, with a minimum and maximum water uptake of 256.86
and 386.09 mm respectively.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
40
Differences in the total water use by different chickpea genotypes were identified from this
technique. This method is sensitive enough to characterise small variations in soil moisture
content. With the help of plant physiological measurements, EMI surveys can be used to
calculate the root depths based on water uptake at different depths and drought tolerance of
different genotypes of chickpeas. This will allow plant breeders to evaluate effective water use
in breeding programs.
2.4.4 Comparisons of ECa data with the Neutron probe results
To validate the water use obtained from the EMI surveys, total water use obtained from the
EMI surveys were compared with the total water use of 40 trial plots of chickpeas measured
using Neutron Moisture Meter (NMM).
Total water use using EMI surveys was plotted against the water uptake obtained from NMM
in Figure 2.8, and the relationship shows an R2 of 0.73. There was not a perfect relationship
between the total water uptake from EMI surveys and NMM as there was a time difference
(approximately 7 days) between the NMM measurements and EMI surveys. Also, NMM
measures soil moisture at a specific location with a considerably smaller sphere of influence,
while EMI surveys cover a larger measurement volume. Nevertheless, this correlation indicates
a compelling relationship between water use obtained by NMM and EMI survey.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
41
Figure 2.8 Comparisons of total water use from EMI surveys and NMM measurements
Overall, multi-layer EMI surveys using plastic buggy system was successfully used to monitor
soil water uptake by 36 genotypes of chickpeas at plot level. Total water use by 20 chickpea
genotypes (in 40 plots) measured by NMM has a significant correlation with the total uses
measured from EMI surveys.
2.5 Conclusions
Soil water monitoring at the plot level is essential with relevance to drought tolerance and the
plants' water use efficiency (Blum 2005; Huang et al. 2018). EMI surveys can potentially be a
less labour-intensive, less expensive, and non-invasive solution for measuring soil water
content at the plot scale. In this study, calibration was done by comparing the soil ECa and soil
volumetric water content with an excellent R2 of 0.86. The instrument was relatively stable and
not much affected by temperature variation. The stability of the EM38-MK2 was ±1 mS m-1.
The coefficient of variation of soil ECa varies between 1.54 % to 9.26 % for a daily change in
the ambient temperature from 25.5 °C to 34.0 °C.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
42
EMI surveys using the plastic buggy system were successfully used to quantify all 36 chickpea
genotypes' total water use. Within the 288 plots of chickpea genotypes, the minimum and
maximum water use were 320.62 - 457.46 mm for irrigated plots and 256.86 - 386.09 mm for
rainfed plots.
The proposed technique is rapid, efficient, and convenient compared to conventional methods.
Also, the resolution of the measurement area and sphere of influence is much larger than the
conventional soil moisture probes. Thus, it can measure soil moisture in the root zone more
accurately. In the future, this method can be potentially be used over the entire season to
estimate the soil moisture with the genotypic and growth-dependent variation in total soil water
uptake by the roots at different depths.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
43
2.6 References
Alghabari, F., Ihsan, M. Z., Hussain, S., Aishia, G., & Daur, I. (2015). Effect of Rht alleles on
wheat grain yield and quality under high temperature and drought stress during
booting and anthesis. Environmental Science and Pollution Research, 22(20), 15506–
15515.
Altdorff, D., Galagedara, L., Nadeem, M., Cheema, M., & Unc, A. (2018). Effect of agronomic
treatments on the accuracy of soil moisture mapping by electromagnetic induction.
Catena, 164, 96–106.
Altdorff, D., von Hebel, C., Borchard, N., van der Kruk, J., Bogena, H. R., Vereecken, H., &
Huisman, J. A. (2017). Potential of catchment-wide soil water content prediction using
electromagnetic induction in a forest ecosystem. Environmental Earth Sciences,
76(3), 111.
Aragüés, R., Guillén, M., & Royo, A. (2010). Five-year growth and yield response of two
young olive cultivars (Olea europaea L., cvs. Arbequina and Empeltre) to soil salinity.
Plant and Soil, 334(1–2), 423–432.
Blanchy, G., Watts, C. W., Ashton, R. W., Webster, C. P., Hawkesford, M. J., Whalley, W. R.,
& Binley, A. (2020). Accounting for heterogeneity in the θ–σ relationship:
Application to wheat phenotyping using EMI. Vadose Zone Journal, 19(1), e20037.
Blessing, C. H., Mariette, A., Kaloki, P., & Bramley, H. (2018). Profligate and conservative:
water use strategies in grain legumes. Journal of Experimental Botany, 69(3), 349–
369.
Blum, A. (2005). Drought resistance, water-use efficiency, and yield potential—are they
compatible, dissonant, or mutually exclusive? Australian Journal of Agricultural
Research, 56(11), 1159–1168.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
44
Bramley, H., Turner, N. C., & Siddique, K. H. M. (2013). Water use efficiency. In Genomics
and breeding for climate-resilient crops (pp. 225–268). Springer.
Carneiro, C., & De Jong, E. (1985). In situ determination of the slope of the calibration curve
of a neutron probe using a volumetric technique. Soil Science, 139(3), 250–254.
Coppola, A., Smettem, K., Ajeel, A., Saeed, A., Dragonetti, G., Comegna, A., … Vacca, A.
(2016). Calibration of an electromagnetic induction sensor with time‐domain
reflectometry data to monitor rootzone electrical conductivity under saline water
irrigation. European Journal of Soil Science, 67(6), 737–748.
Dettmann, U., & Bechtold, M. (2018). Evaluating commercial moisture probes in reference
solutions covering mineral to peat soil conditions. Vadose Zone Journal, 17(1).
EMTOMO. (2014). EMTOMO manual for EM4Soil: A program for 1‐D laterally constrained
inversion of EM data.
Foley, J., & Boulton, R. (2015). Supporting the uptake and application of EMI technologies on
cotton farms.
Gardner, W., & Kirkham, D. (1952). Determination of soil moisture by neutron scattering. Soil
Science, 73(5), 391–402.
Heil, K., & Schmidhalter, U. (2017). The application of EM38: determination of soil
parameters, selection of soil sampling points and use in agriculture and archaeology.
Sensors, 17(11), 2540.
Huang, J, Monteiro Santos, F. A., & Triantafilis, J. (2016). Mapping soil water dynamics and
a moving wetting front by spatiotemporal inversion of electromagnetic induction data.
Water Resources Research, 52(11), 9131–9145.
Huang, Jingyi, Purushothaman, R., McBratney, A., & Bramley, H. (2018). Soil water

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
45
extraction monitored per plot across a field experiment using repeated electromagnetic
induction surveys. Soil Systems, 2(1), 11.
Huang, Jingyi, Scudiero, E., Clary, W., Corwin, D. L., & Triantafilis, J. (2017). Time‐lapse
monitoring of soil water content using electromagnetic conductivity imaging. Soil Use
and Management, 33(2), 191–204.
Kelleners, T. J., Robinson, D. A., Shouse, P. J., Ayars, J. E., & Skaggs, T. H. (2005). Frequency
dependence of the complex permittivity and its impact on dielectric sensor calibration
in soils. Soil Science Society of America Journal, 69(1), 67–76.
Kemna, A., Vanderborght, J., Kulessa, B., & Vereecken, H. (2002). Imaging and
characterisation of subsurface solute transport using electrical resistivity tomography
(ERT) and equivalent transport models. Journal of Hydrology, 267(3–4), 125–146.
Kirkham, M. B. (2005). Time domain reflectometry to measure volumetric soil water content.
In Principles of soil and plant water relations (pp. 187–205). Academic Press.
Kizito, F., Campbell, C. S., Campbell, G. S., Cobos, D. R., Teare, B. L., Carter, B., & Hopmans,
J. W. (2008). Frequency, electrical conductivity and temperature analysis of a low-
cost capacitance soil moisture sensor. Journal of Hydrology, 352(3–4), 367–378.
Klotzsche, A., Jonard, F., Looms, M. C., van der Kruk, J., & Huisman, J. A. (2018). Measuring
soil water content with ground penetrating radar: a decade of progress. Vadose Zone
Journal, 17(1).
Li, H. Y., Shi, Z., Webster, R., & Triantafilis, J. (2013). Mapping the three-dimensional
variation of soil salinity in a rice-paddy soil. Geoderma, 195, 31–41.
Loke, M. H., Chambers, J. E., Rucker, D. F., Kuras, O., & Wilkinson, P. B. (2013). Recent
developments in the direct-current geoelectrical imaging method. Journal of Applied
Geophysics, 95, 135–156.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
46
Long, D. S., Wraith, J. M., & Kegel, G. (2002). A heavy-duty time domain reflectometry soil
moisture probe for use in intensive field sampling. Soil Science Society of America
Journal, 66(2), 396–401.
Lunt, I. A., Hubbard, S. S., & Rubin, Y. (2005). Soil moisture content estimation using ground-
penetrating radar reflection data. Journal of Hydrology, 307(1–4), 254–269.
Mallet, F., Carrière, S. D., Chalikakis, K., & Marc, V. (2018). Assessing soil water content
spatio-temporal variability at the hillslope scale in a headwater catchment using a
multi variable interpolation model based on EMI surveys (Draix, South Alps, France).
Environmental Earth Sciences, 77(13), 507.
McNeill. (1992). Rapid, accurate mapping of soil salinity by electromagnetic ground
conductivity meters. Advances in Measurement of Soil Physical Properties: Bringing
Theory into Practice, (advancesinmeasu), 209–229.
Meissner, R., Rupp, H., & Haselow, L. (2020). Use of lysimeters for monitoring soil water
balance parameters and nutrient leaching. In Climate Change and Soil Interactions
(pp. 171–205). Elsevier.
Nicoară, A., Neagoe, A., Stancu, P., de Giudici, G., Langella, F., Sprocati, A. R., … Kothe, E.
(2014). Coupled pot and lysimeter experiments assessing plant performance in
microbially assisted phytoremediation. Environmental Science and Pollution
Research, 21(11), 6905–6920.
Octura, J. E. R., Gadiaware, P. L., & Octura, E. R. (2020). Estimating Evapotranspiration and
Crop Coefficient of Vegetable Crops Using Pot Micro-lysimeters. Philippine Journal
of Science, 149(4), 1107–1118.
Owino, T. (2012). Evaluation of use of EM38-MK2 AS A Tool to Understand Field Scale
Changes in Soil Properties, A Thesis Presented to the Graduate School of Clemson

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
47
University In Partial Fulfillment of the Requirements for the Degree Master of Science
Environmental Engineer, (August).
Pascual-Seva, N., San Bautista, A., López-Galarza, S., Maroto, J. V., & Pascual, B. (2018).
Influence of different drip irrigation strategies on irrigation water use efficiency on
chufa (Cyperus esculentus L. var. sativus Boeck.) crop. Agricultural Water
Management, 208, 406–413.
Petropoulos, G. P., Griffiths, H. M., Dorigo, W., Xaver, A., & Gruber, A. (2013). Surface soil
moisture estimation: Significance, controls, and conventional measurement
techniques. Remote Sensing of Energy Fluxes and Soil Moisture Content, 29–48.
Pourdad, S. S., & Beg, A. (2003). Safflower: a suitable oilseed crop for dry-land areas of Iran.
In 7th International conference on Development of dry lands (September 14–17),
Tehran.
Reynolds, M., & Tuberosa, R. (2008). Translational research impacting on crop productivity
in drought-prone environments. Current Opinion in Plant Biology, 11(2), 171–179.
Robinson, D. A., Abdu, H., Lebron, I., & Jones, S. B. (2012). Imaging of hill-slope soil
moisture wetting patterns in a semi-arid oak savanna catchment using time-lapse
electromagnetic induction. Journal of Hydrology, 416, 39–49.
Roth, K., Schulin, R., Flühler, H., & Attinger, W. (1990). Calibration of time domain
reflectometry for water content measurement using a composite dielectric approach.
Water Resources Research, 26(10), 2267–2273.
Sadras, V. O., & Angus, J. F. (2006). Benchmarking water-use efficiency of rainfed wheat in
dry environments. Australian Journal of Agricultural Research, 57(8), 847–856.
Samouëlian, A., Cousin, I., Tabbagh, A., Bruand, A., & Richard, G. (2005). Electrical
resistivity survey in soil science: a review. Soil and Tillage Research, 83(2), 173–193.

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
48
Santos, F. A. M. (2004). 1-D laterally constrained inversion of EM34 profiling data. Journal
of Applied Geophysics, 56(2), 123–134.
Sasaki, Y. (2001). Full 3-D inversion of electromagnetic data on PC. Journal of Applied
Geophysics, 46(1), 45–54.
Sehgal, A., Sita, K., Kumar, J., Kumar, S., Singh, S., Siddique, K. H. M., & Nayyar, H. (2017).
Effects of drought, heat and their interaction on the growth, yield and photosynthetic
function of lentil (Lens culinaris Medikus) genotypes varying in heat and drought
sensitivity. Frontiers in Plant Science, 8, 1776.
Shanahan, P. W., Binley, A., Whalley, W. R., & Watts, C. W. (2015). The use of
electromagnetic induction to monitor changes in soil moisture profiles beneath
different wheat genotypes. Soil Science Society of America Journal, 79(2), 459–466.
Siddique, K. H. M., Regan, K. L., Tennant, D., & Thomson, B. D. (2001). Water use and water
use efficiency of cool season grain legumes in low rainfall Mediterranean-type
environments. European Journal of Agronomy, 15(4), 267–280.
Sparks, D. L. (2012). Advances in agronomy. Academic Press.
Subba, P., Barua, P., Kumar, R., Datta, A., Soni, K. K., Chakraborty, S., & Chakraborty, N.
(2013). Phosphoproteomic dynamics of chickpea (Cicer arietinum L.) reveals shared
and distinct components of dehydration response. Journal of Proteome Research,
12(11), 5025–5047.
Sudduth, K. A., Kitchen, N. R., Bollero, G. A., Bullock, D. G., & Wiebold, W. J. (2003).
Comparison of electromagnetic induction and direct sensing of soil electrical
conductivity. Agronomy Journal, 95(3), 472–482.
Tharanya, M., Kholova, J., Sivasakthi, K., Seghal, D., Hash, C. T., Raj, B., … Yadav, R.
(2018). Quantitative trait loci (QTLs) for water use and crop production traits co-

Chapter 2: Development of a Crop Water Use Monitoring System at the Plot Level
49
locate with major QTL for tolerance to water deficit in a fine-mapping population of
pearl millet (Pennisetum glaucum LR Br.). Theoretical and Applied Genetics, 131(7),
1509–1529.
Topp, G. C., Davis, J. L., & Annan, A. P. (1980). Electromagnetic determination of soil water
content: Measurements in coaxial transmission lines. Water Resources Research,
16(3), 574–582.
Triantafilis, J., & Lesch, S. M. (2005). Mapping clay content variation using electromagnetic
induction techniques. Computers and Electronics in Agriculture, 46(1–3), 203–237.
Triantafilis, J., & Santos, F. A. M. (2013). Electromagnetic conductivity imaging (EMCI) of
soil using a DUALEM-421 and inversion modelling software (EM4Soil). Geoderma,
211, 28–38.

50
CHAPTER 3
TEMPORAL ANALYSIS OF SOIL WATER EXTRACTION BY
DIFFERENT GENOTYPES OF CHICKPEAS USING EMI
SURVEYS

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
51
3.1 Summary
The growth and productivity of plants are negatively affected by the water deficit that causes
drought stress. Phenotyping of plants is important for explaining important traits' genetic basis
and their performance in resource-limited environments. The cost of genotyping and
phenotyping using conventional methods limits the number of research projects required for
gene discovery and molecular marker development. Monitoring the soil moisture cost-
effectively at the plot scale will allow breeders to conduct drought tolerance and phenotyping
research and select water-efficient cultivars. EMI surveys can be an efficient, cost-effective
and rapid solution for these types of studies. In this chapter, depth-specific temporal analyses
of chickpea plants over two growing seasons (summer 2018 and 2019) were studied using
plastic buggy based EMI surveys. In 2018, I5A chickpea cropping field surveys were
conducted every fortnight at five different heights (0, 20, 40, 60, and 80 cm) in static recording
mode. K-means cluster analysis was used to group chickpea genotypes of three soil layers (0-
30 cm, 30-60 cm, and 60-100 cm) based on the change in soil moisture. The cumulative RAW
depth profile at pre-podding, post-podding, and mature stages were analysed along 1.5 m
depths using soil ECa data. In 2019, soil ECa was recorded at three different heights (0, 20,
and 80 cm) in an automatic recording mode from Campey-1 cropping field at various growth
stages. These survey data were used to group 192 genotypes of chickpeas based on soil
moisture extraction along various depths. Boxplots of total water uses of these chickpea
genotypes were analysed. Overall, the analyses revealed crops’ different water extraction
pattern. Water-efficient chickpea plants tend to extract more water from deeper soil profiles.
Temporal analysis of the soil moisture extraction at different growth stages indicates that the
least water-efficient genotypes extracted more water until podding but comparatively less water
at the maturity stage. This chapter illustrated the buggy-based EMI survey system's ability to

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
52
conduct the depth-specific temporal analysis of soil moisture at a plot scale that can be
potentially used for genotypic rankings based on root phenotypes.
3.2 Introduction
Temporal analysis of soil moisture extraction by plants at various depths in the soil is very
important for studying plants' response to drought and irrigation (Huang et al. 2018) and
phenotyping root activities (Whalley et al., 2017). In precision agriculture, soil moisture
sensing probes are commonly used to monitor soil moisture activity in particular sections of a
field that enable farmers to react quickly to changes in the land and crops (Zhang, Wang, &
Wang, 2002). It also helps farmers to make rapid and accurate decisions related to crop
productions and land managements (Girard & Hubert, 1999; Rinaldi & He, 2014; Rossi, Caffi,
& Salinari, 2012). These sensors allow farmers to observe the big picture of the agricultural
fields by combining soil sensors, weather, historical crop data, and other physiological
measurements by plants (Araus & Cairns, 2014; Denmead & Shaw, 1962).
Most soil moisture sensors are capable of depth-specific measurement of soil moisture of a
point location as the sphere of influence is low compared to proximal geophysical sensors
(Corwin & Lesch, 2003; Paraskevas, Georgiou, Ilias, Panoras, & Babajimopoulos, 2012).
However, the type of soil is never consistent across the agricultural field (Guber et al., 2008).
This problem can be tackled by installing multiple moisture sensors across a field. The
increased numbers of moisture sensors improve the measurements' accuracy and actively
monitor the moisture changes. These permit farmers to take necessary action in critical field
conditions such as low water levels that produce a stress condition for plants. But it is not cost-
effective to install and maintain many soil moisture probes in a field as these sensors are
expensive, and the maintenance cost is also high (González-Teruel et al., 2019; Gutiérrez,
Villa-Medina, Nieto-Garibay, & Porta-Gándara, 2013).

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
53
Monitoring soil water uptake by plants is becoming an important tool for plant phenotyping.
The ability to monitor soil water change accurately at the plot scale or individual plant-scale is
crucial to select the best cultivars that can extract water more efficiently from deeper soil
profiles (Whalley et al., 2017). Efficient methods are required to monitor plant water extraction
at different depths to infer root water uptake efficiency.
Over recent years, many studies have been conducted on predicting soil moisture using EMI
surveys (Sheets & Hendrickx 1995; Hanson & Kaita 1997; Reedy & Scanlon 2003). But only
a few studies were conducted on the depth-specific temporal analysis of water uptake by plants
using soil ECa. A novel approach was used for estimating relative variation in soil moisture by
David A Robinson et al. (2012). In their study, bulk soil electrical conductivity (ECa) of the
driest seasonal soil map was subtracted from the ECa collected during subsequent wetting. This
approach permits us to remove the effects of spatially distributed mineral and other factors and
allows the estimation of water content.
Huang et al. (2016) developed a spatiotemporal inversion algorithm, which accounted for the
temporal measurement of ECa, and demonstrated that the approach was more accurate and less
biased compared with the non-spatiotemporal inversion techniques. This algorithm was used
for a case study where time-lapse ECa was collected on a 350 m transect for seven consecutive
days. The spatiotemporal inversion algorithm allows reducing the number of ECa surveys over
the long transacts. A similar type of study was conducted where DUALEM-421 was used for
the EMI surveys over 12 days after the irrigation events. EM4Soil was used to generate EM
conductivity images (EMCIs) (Huang et al. 2017).
Moghadas et al. (2017) monitored the spatiotemporal soil moisture profile of an irrigated field
using the probabilistic inversion of time-lapse EMI data. In this study, time-lapse EMI surveys
were done along a 10 m transect of a maize field over six days using a CMD mini-Explorer

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
54
sensor. A probabilistic sampling approach, DREAM (ZS) was applied to derive a time-lapsed
depth-specific subsurface electrical conductivity (σ) tomography (Rhoades, Raats, & Prather,
1976). The petrophysical relationship was used to convert the soil σ to moisture content. The
temporal root zone soil moisture variations and the dynamics of soil moisture or infiltration
processes were also studied.
Martini et al. (2017) conducted a temporal repeated EMI survey for soil moisture mapping and
validated the wireless soil moisture monitoring network using EM38-DD. It was found that
soil ECa changes slightly with the change in soil moisture from dry conditions to almost
saturation. Also, the relation between soil ECa and moisture content varied with time. One of
the key findings of that study was that it is challenging to monitor change in the soil moisture
with the soil with low clay content. Depth specific temporal variation of the soil ECa was
analysed in this study.
Huang et al. (2018) measured plot scale soil moisture across a chickpea field using time-lapsed
ECa data from EM38 meter. Soil ECa data of 20 plots were recorded for both irrigated and
rainfed blocks in vertical and horizontal mode at five different heights (i.e., 0 m, 0.2 m, 0.4 m,
0.6 m, and 0.8 m). The ECa data were converted to soil moisture from an empirical multiple
linear regression model of soil moisture measured by neutron probe and depth-specific
electrical conductivity generated by a 1-D EM inversion algorithm. Then EM38 surveys were
done for all 288 plots at the same heights on four different dates within two weeks. In that
study, soil moisture dynamics were successfully determined with a coefficient of determination
(R2) of 0.87 and a root-mean-square-error (RMSE) of 0.037 m3 m-3.
Whalley et al. (2017) estimated change in soil moisture to monitor the activity of phenotyping
roots in the field using electrical resistance tomography (ERT), EMI surveys, and penetrometer
measurements. A comparative study between these techniques shows that EMI surveys are

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
55
more sensitive compared to the penetrometer or ERT surveys but less effective in drier soils.
The potential of EMI surveys to investigate the root activity quickly for a large area has not
been realised.
In this study, depth-specific temporal analyses of chickpea plants over two growing seasons
were studied to monitor water extraction and phenotyping root activity of chickpea genotypes
along the soil's depth profile.
The study was conducted in two different fields, I5A in 2018 and Campey-1 in 2019, at the
Plant Breeding Institute (PBI) of The University of Sydney, Narrabri. In 2018, the EMI
measurement method was being developed, including measuring EMI at each plot manually at
five heights above ground. Based on these results, in 2019, the survey was made more efficient
by using the EMI on-the-go mode at only three heights above ground. The EMI data allows the
calculation of the depth profile of water use and the distribution of available soil moisture in
different layers of soil for different genotypes.
3.3 Materials and Methods
In this chapter, EMI surveys with the plastic buggy system described in Chapter 2, were used
to collect all ECa measurements in two different chickpea cropping fields. The aim is to conduct
depth specific temporal analysis of soil moisture at the plot scale. This information will be used
to identify more efficient chickpea varieties.
3.3.1 EMI Measurement System
EMI surveys were done using a customized buggy system wholly made of plastic. The plastic
buggy consists of four wheels fixed at the four corners of the buggy to allow it to easily follow
the 2 m wheel track of the tractors between the plots. The EM38MK-2 was suspended from
two sides using two plastic chains, as shown in Figure 3.1. These chains were used to set the

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
56
device at different heights above the ground surface. There was provision for changing the
position of the EM38-MK2 along the width of the plots as well to keep the device in between
the rows of the plants, especially for the measurements of 0 and 20 cm above the ground
surface.
Figure 3.1 Plastic chain system for plastic buggy
3.3.2 Field location
The study area was located in Narrabri, NSW, Australia. The experiments were done on an
experimental farm of the Plant Breeding Institute of The University of Sydney (30.3324° S,
149.7812° E) (Figure 3.2).

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
57
Figure 3.2 Trial areas (I5A and Campey-1) for chickpea mapping population
3.3.2.1 Chickpea variety 2018 trial
A total of 36 different chickpea (Cicer arietinum) genotypes were sown on 1st June 2018 in
I5A field. Two ranges of buffer plots were planted with the cultivar PBA Seamer on both sides
and in the middle. Two buffer rows were also sown at the start and end of the trial plots. The
trial area was 0.6 ha (180 m × 32 m) and divided into irrigated and rainfed blocks (Figure 3).

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
58
About 201 mm of rainfall was recorded within the whole season. Irrigated and rainfed blocks
received around 190 mm and 110 mm of irrigation water, respectively. A total of 288 plots (1.6
m x 6 m) were planted in the field, which is surrounded by two rows of buffer plots. EMI
surveys were done fortnightly, starting from 14th June 2018 to 9th November 2018.
Static ECa measurements were recorded in I5A chickpea field fortnightly. The buggy was
pushed in the middle of each plot, and a trigger was pressed to record the ECa at five different
heights (0, 20, 40, 60, and 80 cm) to obtain the ECa of 15, 35, 55, 75, 90, 110, 130 and 150 cm
below the ground surface (Figure 3).
3.3.2.2 Chickpea variety 2019 trial
In Campey-1, 192 different chickpea (Cicer arietinum) genotypes were sown on 3rd June 2019
in 384 plots. One buffer plot was planted with the Desi chickpea genotype on all the field sides
and three ranges of buffers in the middle. The trial area was 0.72 ha (180 m × 40 m) and divided
equally into two blocks, based on two replications of all 192 chickpea genotypes. The trial has
received around 70 mm of rainfall water within the whole season. It also received about 110
mm of irrigation water.
Soil ECa was measured during the critical plant growth stages starting from 6th June 2019 to 9th
November 2019. This total time frame includes the early stage of seed germination to the
harvesting of the chickpeas. In total, four measurements were taken on 6th June, 25th September,
3rd October, and 9th November 2019. Continuous ECa measurements were taken for all 384
plots at the heights of 0, 20, and 80 cm above the surface, which provides the ECa of 55, 75,
130, and 150 cm depth below the soil surface.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
59
The continuous ECa data were interpolated for the whole area using kriging to produce ECa
maps, and then the zonal statistics were extracted for each plot. Interpolated soil ECa's were
proven to be similar to the soil ECa's collected from static measurements (Chapter 2).
A study was done to optimize the number of EMI surveys at different heights and found that
ECa measurements at 0, 20, and 80 cm measurements can be used for the multi-layer inversion
to obtain the inverted ECa up to 1.5 m as explained in Chapter 2.
These heights were implemented in 2019 for surveying Campey -1 chickpea field. Continuous
soil ECa was measured in auto mode at 0, 20, and 80 cm above the ground to record soil ECa
of 55, 75, 130, and 150 cm below the ground surface (Figure 3.3). Only four EMI surveys were
conducted within the whole growing season at different growth stages (post-sowing, pre-
podding, post-podding and after harvesting). The measurement mode was set for five
measurements per second and saved in the data logger continuously for the whole field. The
recorded measurements were saved with extension N38 as binary raw data files.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
60
(a) (b)
Figure 3.3 EMI surveys at 0, 20, 40, 60, and 80 cm heights at I5A (2018) and 0, 20, and 80 cm
heights at Campey-1 (2019).
3.3.3 Inversion of the EMI data
The inversion of the EMI data was done to interpolate measurements up to the depth of 1.5m.
A multi-layered 2-D inversion technique was used to consider all the depths in the inversion
analysis using EM4Soil. The inversion was done for the initials layers of 0-0.3 m, 0.3-0.6 m,
0.6-0.9 m, 0.9-1.2 m, and 1.2-1.5 m. Optimised damping factor (λ) and the number of iterations
were used to obtain minimum RMSE from the inversion results. In this study, the S2 model
(Sasaki 2001) was used. After the inversion, results were exported as a text file that includes
the co-ordinates, topology, distance, depth below the surface, electrical conductivity, and
electrical resistivity. Same as EMI surveys with five heights, soil ECa of every 10 cm intervals
were obtained after the inversion.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
61
3.3.4 Calibration of ECa data
Soil cores of 1.5 m were collected from 15 plots, and EMI surveys were done at 0, 20, 40, 60,
and 80 cm heights above the ground. Volumetric moisture contents were measured for every
10 cm of the soil cores. From the linear regression analysis between VMC and ECa, R2 was
found to be 0.86. The following empirical equation was found from the regression analysis,
which was used to convert soil ECa to VMC,
𝑉𝑉𝑉𝑉𝐶𝐶 = 0.2874𝐸𝐸𝐶𝐶𝑎𝑎 + 12.112 (3.1)
3.3.5 Water use calculation
Water use by the plant was expressed as Evapotranspiration (ET), calculated using the plant
root zone water balance model as below,
ET = P + I –∆S (3.2)
Where,
ET = Evapotranspiration or water use by plants
∆S = Change in root zone soil water storage over the time period
P = Precipitation
I = Irrigation

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
62
3.3.6 Data Analysis
3.3.6.1 Soil moisture time series and depth profile of cumulative RAW analyses from 2018
EMI survey
Time series soil moisture analysis was done to understand the pattern of soil moisture
extraction by different genotypes. A k-means cluster analysis was used to group the change in
soil moisture over time into clusters with a similar trend of three different soil layers (0-30 cm,
30-60 cm, and 60-100 cm). The change in soil moisture ΔS of each fortnight from week 4 to
11 was calculated based on the EMI surveys up to the depth of 100 cm. The cumulative soil
water change was then calculated as the sum of ΔS from week 2 to successive weeks. The
cluster analysis was conducted for combined measurements of soil moisture change in three
layers. JMP Pro was used for this cluster analysis. Based on the Cubic Clustering Criterion
(SAS-Sarle, 1983), the optimum number of clusters was six.
The depth profile of ∆S at different stages (pre-podding, post-podding, and mature stage) was
calculated for six different chickpeas clusters. At first, the available soil VMC of every 20 cm
of soil layers was calculated. Then change in soil moisture (∆S) for three different stages was
determined by subtracting the soil VMC of the first measurement from the mean soil VMC of
the end of the pre-podding stage, post-podding stage, and mature stage. Then k-means cluster
analysis was conducted for all the measurements to divide all 36 genotypes into six clusters
based on a similar pattern on soil moisture extraction. Finally, the ∆S of all clusters for three
different stages were plotted against the depth of soil.
In this study, the depth profile of soil readily available water (RAW) was investigated for
different growth stages of chickpea plants. RAW was measured for the genotypes with
maximum and minimum soil water use in different treatments (irrigated and rainfed) at various
growth stages. Cumulative RAW at pre-podding and post-podding stages were determined by

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
63
adding all soil VMC measurements from sowing until pre-podding and after podding until
harvesting, respectively. The total was calculated by adding the RAW obtained from all the
EMI surveys from sowing until the harvesting.
3.3.6.2 Depth profile of cumulative RAW, ∆S, and temporal analyses at different growth
stages from 2019 EMI surveys
In 2019, four EMI surveys were conducted for 192 genotypes of chickpeas that were sown in
384 plots. Similarly, like 2018, k-means cluster analyses of ∆S were done for data of every 20
cm, and all genotypes of chickpeas were grouped into six different clusters. After that, ∆S depth
profile for pre-podding, post-podding, and mature stages was plotted against depth.
The boxplots of the total water use for all six clusters were plotted to analyse the distribution
and the median of the total water used for different clusters (Figure 3.11). Total water uses for
all chickpea genotypes were evaluated as evapotranspiration from equation (3.2).
Cumulative RAW measured from the EMI surveys at various growth stages was plotted against
the depths to analyse soil water uptake in chickpea plants' root zones (Figure 3.12). Cumulative
RAW of pre-podding stages was calculated by adding available soil moisture obtained from
the EMI surveys of 6th June and 25th September after converting soil ECa to soil VMC using
equation (3.1). Post-podding cumulative RAW was calculated by adding available water from
the 6th June, 25th September, and 3rd October surveys. Finally, the cumulative RAW of the
mature stages was calculated from the EMI surveys of all measurements (6th June, 25th
September, 3rd October, and 9th November) in 2019.
Temporal analysis of soil ∆S at different soil layers was also calculated. The most and the least
water-efficient genotypes were selected based on total water uptake. In this analysis, a total
measured depth of 150 cm was divided into four layers (20 – 30 cm, 40 – 60 cm, 70- 80 cm,

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
64
and 90 – 120 cm) based on the similar pattern of the existing soil VMC's. Soil ∆S for 114, 122,
and 159 days after sowing the seeds were calculated by subtracting the available soil moisture
measured on 25th September, 3rd October, and 9th November from the initial soil moisture
recorded from the EMI surveys on 6th June 2019.
3.4 Results and discussion
The results and discussions of the analyses from the EMI surveys conducted in I5A (2018) and
Campey -1 (2019) chickpea fields, were divided into two separate sections.
3.4.1 Depth specific temporal analyses for the EMI surveys from 2018 (I5A)
3.4.1.1 Time series soil moisture analysis at different layers
Soil VMC of three soil layers (0-30 cm, 30-60 cm, and 60-100 cm) evaluated by the EMI
survey was used in a time series analysis. A k-means cluster analysis was used to group the
change in soil moisture over time into clusters with a similar trend. The cluster analysis was
conducted for combined measurements of change in soil moisture in three layers. ΔS of all
three layers, as grouped by the k means analysis, were plotted separately in Figures 3.4, 3.5,
and 3.6. This analysis shows the variation of water use of different chickpea genotypes at 0-30
cm, 30-60 cm, and 60-100 cm over the whole season.
Figure 3.4 shows the soil moisture uptake trend for various chickpea genotypes within 0-30 cm
depth. Chickpea genotypes extract soil water slowly until the week of 17. A slight increase in
ΔS was observed until week 20 due to rainfall water.
Cluster 1 and 2 contain chickpea genotypes grown in the irrigated plots. Both clusters show a
slight extraction of soil moisture throughout the whole season. Genotypes from rainfed plots
constituted clusters 3 and 4. A slight increase in existing soil moisture was observed after week
17 until week 20. Chickpea genotypes of clusters 5 and 6 were grown in both treatment

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
65
(irrigated and rainfed). Like other clusters, a similar downward trend can be observed until
week 15 before increasing the soil until week 20.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
66
Figure 3.4. Cluster means based on the weekly change in soil moisture content (ΔS) over the
whole season within 0-30 cm depth. Each line represents a chickpea genotype grouped into
clusters of similar patterns. The red line represents the mean value of the cluster.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
67
A higher proportion of soil moisture has been extracted from the soil layer of 30-60 cm
compared to the previous layer. On average, ΔS were varied between 70 mm to 110 mm within
week 1 to week 16. Chickpea genotypes from rainfed plots (clusters 3 & 4) extracted more soil
water compared to irrigated plots.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
68
Figure 3.5. Cluster means based on the weekly change in soil moisture content (ΔS) over the
whole season within 30-60 cm depth. Each line represents a chickpea genotype grouped into
clusters of similar patterns. The red line represents the mean value of the cluster.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
69
During the maturity stage, soil moisture was predominantly extracted from 0 – 60 cm. Due to
the high rainfall and irrigation water, soil moisture accumulates at a depth of 60 – 100 cm from
week 20 to week 22.
Cluster 1 and 2 were grown under the irrigated condition. Water use by the genotypes in cluster
1 was relatively steady throughout the whole period except for a few increases due to the
irrigation and rainfall water. The average ΔS for Cluster 1 is 26.19 mm, and cluster 2 is 28.77
mm.
Clusters 3 and 4 comprise a higher proportion of chickpea genotypes from the rainfed plots.
These 2 clusters show a decrease in ΔS until week 16 and then another water uptake at week
20 during maturity. Cluster 3 has an average ΔS of 35.01 mm, and cluster 4 has 40.26 mm.
A similar proportion of genotypes from irrigated and rainfed plots were found in clusters 5 and
6. These genotypes appear to have a decreasing trend of ΔS over time. Cluster 5 has an average
ΔS of 34.56 mm, and cluster 6 has 29.31 mm. Overall, clusters 3 & 4 extracted more water
compared to other clusters at the maturity stage.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
70
Figure 3.6. Cluster means based on the weekly change in soil moisture content (ΔS) over the
whole season within the depth of 60-100 cm. Each line represents a chickpea genotype grouped
into clusters of similar patterns. The red line represents the mean value of the cluster.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
71
Genotypes from Rainfed plots extracted most of the water from all three soil layers (0-30 cm,
30-60 cm, and 60-100 cm) below the ground surface. This analysis shows that the EMI
fortnightly surveys are able to detect changes in soil moisture due to irrigation, rainfall, and
plant uptake. The time series ΔS can reveal the pattern of water uptake of different genotypes.
Under the rainfed condition, genotypes in cluster 3 were more water-efficient, and under
irrigation, genotypes in cluster 1 were the most water-efficient. Genotypes in cluster 5 and 6
tend to behave less water-efficient genotypes. This system can potentially be used for depth
specific temporal analysis to allow plant breeders to study the soil moisture dynamics and
plant's response to drought and irrigation.
As a summary, the change in soil moisture represented as the mean of each cluster was plotted
against the depth for three different growth stages (pre-podding, post-podding, and mature
stages). Figure 3.7 shows water uptake behaviour of plant roots at different depths below the
ground surface.
Most genotypes behave similarly at pre-podding stages, extracted most water at 60-80 cm
except for cluster 3 (rainfed) that extracted more at 60-100 cm. At the post-podding stage, most
genotypes still used water in the 60-80 cm depth, except for cluster 4 (rainfed) that extracted
more water below 1 m. At the maturity stage, clusters 3 and 4 stood out to be using most water
below 1 m, but these clusters also extracted more water from 0-50 cm depth compared to other
clusters. The dynamic behaviour of water extraction from this analysis indicates that the EMI
survey can detect water extraction pattern for different genotypes.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
72
Figure 3.7. ΔS depth profile for all clusters at three different stages from EMI surveys in
2018
3.4.1.2 Depth profile of cumulative RAW at different growth stages
After converting soil ECa into soil VMC, cumulative RAW in each plot was evaluated. RAW
was measured for each genotype based on its maximum and minimum soil water content at
different treatments (irrigated and rainfed). Soil RAW for three different stages was plotted
against the depth of soil up to the depth of 1.5 m to study the water extraction behaviour of
maximum and minimum water use genotypes in both irrigated and rainfed plots.
Irrigated plots
Figure 3.8 shows the soil RAW depth profile for the most water-efficient chickpea genotypes
in the irrigated plots. Soil moisture was extracted mostly from 60 to 110 cm until the pre-
podding stage. After the podding, soil moisture was extracted from 110 – 140 cm. Because of
irrigation and rainfall water, RAW was higher up to the depth of 30 cm from the surface. The
RAW depth profile at the mature stage is almost similar to the RAW pattern at the pre-podding
stage. Chickpeas with maximum water use extracted less water up to the depth of 60 cm. After

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
73
that, soil moisture extraction by plant roots starts to increase gradually. Most of the water
uptake was noticed within 60 – 100 cm depth, but it continued until 140 cm. After the podding
stage, soil moisture extraction of the least water use efficient chickpea genotypes is almost
similar to the most water-efficient chickpea plant.
(a) (b)
Figure 3.8 Soil RAW at different stages (pre-podding, post-podding, and maturity) of plant
growth in the irrigated plots for chickpea genotypes with (a) minimum and (b) maximum water
extraction throughout the whole season.
Rainfed plots
The RAW depth profile for the most (Figure 3.9a) and least water-efficient chickpea genotypes
(Figure 3.9b) is illustrated for different plant growth stages. The most water extracted by the
most water-efficient genotype is from the depth of 50 – 80 cm. However, for the least water-
efficient genotype, maximum soil moisture was extracted from 60 – 90 cm, and steady water
uptake can be observed from 90 -110 cm below the ground surface.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
74
(a) (b)
Figure 3.9 Soil RAW at different stages (pre-podding, post-podding, and maturity) of plant
growth in the rainfed plots for chickpea genotypes with (a) minimum and (b) maximum water
extraction throughout the whole season.
Overall, it can be observed that the most water-efficient genotypes extract more water from
shallow depths compared to the least water-efficient genotypes for both treatments. Still, at
higher depths, the least efficient chickpea genotypes extract more moisture than most efficient
genotypes. The pattern of soil moisture extraction at the mature stage is similar to the pre-
podding stage pattern. The least water-efficient genotypes extract more water from the depth
of 90 – 120 cm compared to the most water-efficient chickpea genotypes.
These analyses (time series soil moisture analysis and cumulative RAW at different growth
stages and the depth profile) were able to monitor soil water extraction dynamics at different
depths of soil. It shows that the fortnightly conducted EMI surveys can be potentially used to
quantify genotypic differences in chickpea plants' root activity. In the next sub-section, water
extraction of most and least water-efficient chickpea genotypes was analysed to investigate

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
75
genotypic differences in water uptake with the depth profiles. The optimized number of EMI
surveys (four different stages) were conducted at 0, 20, and 80 cm above the ground to collect
continuous ECa measurements.
3.4.2 Depth specific temporal analyses for the EMI surveys from 2019 field trial
(Campey-1)
3.4.2.1 Depth profile of ∆S of various clusters from EMI surveys at different growth stages
for Campey-1
K-means cluster analysis of ∆S was conducted for 192 genotypes from Campey-1, similar to
the analysis done for I5A (2018). All the genotypes were grouped into six different clusters
based on the water extraction time series data. The mean ∆S was plotted against soil depth for
three different stages, as shown in Figure 3.10.
Figure 3.10. ΔS depth profile for all clusters at three different stages from EMI surveys in 2019

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
76
Figure 3.10 shows that almost all genotypes of chickpeas extracted most water at a depth deeper
than 1 m. Clusters 5 and 6 extracted less water in the surface but more water at a lower depth.
Due to the higher amount of water availability at the podding stage due to irrigation, the effect
of soil moisture extraction is less dominant at the post-podding stage. All the clusters extracted
more water at the maturity stage compared to the pre-podding and post-podding stage. Clusters
5,6, and 3 appear to extract more at 100-140 cm compared to other genotypes.
3.4.2.2 Variations in the total water use by different clusters of chickpea genotypes
Boxplots of total water use of all six clusters were plotted, as shown in Figure 11. From the
depth profile of ∆S at different growth stages, soil water extraction pattern at various depths
by different clusters was investigated. In this section, total water uses for different clusters were
compared to find the relationship between water extraction of different clusters and total water
use for the whole season.
Figure 3.11. Total water uses of various clusters

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
77
Chickpea genotypes in clusters 5 and 6 (median of 132.21 and 135.14 mm) extracted the largest
amount of soil moisture compared to the other clusters. The depth profile of ∆S (Figure 3.10)
shows these clusters extracted more water from 60 cm to 140 cm and comparatively less water
from the surface. Cluster 1 and 4 used less water (median of 105.1 and 100.12 mm) within the
whole season. The water uptake by these two clusters was high within the topsoil but
comparatively low at higher depths. The total water uptake by clusters 3 and 4 was moderate,
with a median of 116.29 mm and 125.73 mm, respectively.
3.4.2.3 Depth profile of cumulative RAW at different growth stages
Cumulative RAW of pre-podding, post-podding, and mature stages along the depth profile for
the most and least water-efficient chickpea genotypes were analysed in this section. Cumulative
RAW of different growth stages was plotted against the depth profile of 1.5 m to monitor the
soil dynamics of the soil moisture extractions by chickpea genotypes with high and low water
use.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
78
Figure 3.12. Soil RAW at different stages (pre-podding, post-podding, and maturity) of plant
growth chickpea genotypes with (a) minimum and (b) maximum water extraction all over the
growing season.
Cumulative RAW at the pre-podding stage indicates that most of the soil moisture was
extracted within 90 cm depth from the surface, as shown in Figure 3.12. Since the RAW of the
pre-podding stage was calculated by adding the available soil moisture from the EMI surveys
until the podding stage, some details of soil moisture extraction activities up to the pre-podding
stage were missing unlike in the cumulative RAW depth profile for I5A field in 2018. During
the plants' post-podding phase, a higher amount of soil moisture was extracted within 40 cm
from the surface by the least water-efficient genotype compared to the most water-efficient
genotype. But more soil moisture was extracted by the most water use genotype within 100 -
120 cm at the post-podding stage. From the cumulative RAW depth profile of the mature stage,
it can be observed that the most water-efficient genotype of chickpea extracts less water at
shallow depths.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
79
3.4.2.4 Temporal analysis of ∆S for high and low water-efficient genotypes at different
soil layers at the mature stage
Temporal analysis of ∆S of four different layers (20 – 30 cm, 40 – 60 cm, 70- 80 cm, and 90 –
120 cm) was done by plotting ∆S of 108, 118, and 155 days after sowing against the days after
sowing the seeds as shown in Figure 3.13. The water uptake behaviour at three growth stages
was studied in the earlier sections. This section will examine the water extraction dynamics of
most and least water-efficient genotypes at different days of EMI surveys.
The least water-efficient genotype extracted nearly 5 mm of water within 108 to 118 days after
sowing. On the other hand, the most water-efficient genotype extracted about 7 mm of water
within these days. So, the most water-efficient genotype extracted more water during the
podding of chickpeas compared to the least water-efficient genotype. A combined effect of
high rainfall and irrigation water caused a significant rise in the available soil moisture in 118
to 155 days after sowing. At this stage, the least water-efficient chickpea genotype extracted
more water than most water-efficient genotypes at all soil layers. Considerable difference in
water extraction was noticed in the top layer (20 - 30 cm) between these genotypes. of soil
between the most, and the least water-efficient genotypes was observed.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
80
Figure 3.13. Available soil VMC of different layers against the days after sowing for least and
most water-efficient chickpea genotypes
Overall, the least water-efficient genotype of chickpea extracted more water during the podding
but slightly less water after the podding stage compared to more water-efficient chickpea
genotypes. Most of the soil moisture was extracted within the depth of 50-100 cm from the
surface.
3.5 Conclusions
The EMI surveys using the plastic buggy system have the potential to analyse the temporal and
depth analysis of water extraction by various genotypes of chickpeas. This technique can
monitor the soil moisture so that quick measures can be taken in response to the drought stress
condition of plants more conveniently. EMI surveys were done in 2018 (I5A field) at 0, 20, 40,

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
81
60, and 80 cm heights in static recording mode and in 2019 (Campey-1) at 0, 20, and 80 cm
heights in automatic recording mode with EM38MK-2. The calibration equation between soil
ECa and VMC with R2 of 0.86 was used to measure soil moisture at the plot level.
K-means cluster analysis of soil moisture extraction at different depths successfully
differentiated chickpea genotypes into clusters based on their treatments (rainfed and irrigated).
This analysis shows the dynamics of ΔS for different weeks after sowing the seeds in the field
(I5A) and genotypes' water efficiency in various clusters. Overall, chickpeas on rainfed plots
(clusters 3 & 4) used most water, and comparatively, most water use efficient chickpea
genotypes were found in cluster 1.
The cumulative RAW depth profile illustrated the total soil moisture extraction at pre-podding
and post-podding stages within 1.5 m depths from the surface. The major variations in the
cumulative RAW were observed between irrigated and rainfed after 50-130 cm. Water
extraction at pre-podding stages varies within the depth in the irrigated and rainfed plots.
Similar cluster analyses were conducted for just four EMI surveys in 2019 throughout the
whole season at three heights in the on-the-go mode. The ΔS depth profile shows that clusters
5 and 6 exhibited the least soil moisture efficiency. Most soil moisture were extracted from the
depth of 100 cm in all three stages.
From the distribution of total water uses of chickpea genotypes in the various clusters, clusters
6 and 4 were the most and least water-efficient. So, using this analysis, a general idea of total
water use of the clusters of different chickpea genotypes was successfully determined from
optimized EMI surveys in auto mode.
Depth profile analysis for the cumulative RAW was done using the EMI surveys conducted in
just four different growth stages of chickpea plants in 2019. These RAW depth profiles do not

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
82
provide a detailed illustration of root zone water uptake within initial ECa measurements and
podding phase like the cumulative RAW depth profiles from the EMI surveys conducted in
2018. Nevertheless, these were sufficient to shows soil extraction dynamics by the chickpea
plants at major growth stages.
Temporal analysis of ∆S explained the change in available soil moisture for several soil layers
within various days after sowing the seeds. With the growth of the chickpea plants, more soil
water was extracted from the depth of 40 to 120 cm for both most and least water-efficient
genotypes. In the top layer (20 – 30 cm) of soil, the least water-efficient chickpea genotype
extracts less water within pre-podding to the maturity stage than the most water-efficient ones.
This study describes soil EMI surveys' ability to conduct the depth-specific temporal analysis
of soil moisture over the whole season from sowing till harvesting. This technique can be
applied at the plot level. In the future, this method will be beneficial for plant physiologists and
breeders to investigate the plant root zone behavior and the dynamics of water extraction by
plants. This technique can also be used for genotypic rankings based on root phenotypes.

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
83
3.6 References
Araus, José Luis, and Jill E. Cairns. 2014. “Field High-Throughput Phenotyping: The New
Crop Breeding Frontier.” Trends in Plant Science 19(1):52–61.
Corwin, D. L., and S. M. Lesch. 2003. “Application of Soil Electrical Conductivity to Precision
Agriculture.” Agronomy Journal 95(3):455–71.
Denmead, Owen Thomas, and Robert Harold Shaw. 1962. “Availability of Soil Water to Plants
as Affected by Soil Moisture Content and Meteorological Conditions 1.” Agronomy
Journal 54(5):385–90.
Girard, N., and B. Hubert. 1999. “Modelling Expert Knowledge with Knowledge-Based
Systems to Design Decision Aids: The Example of a Knowledge-Based Model on
Grazing Management.” Agricultural Systems 59(2):123–44.
González-Teruel, Juan D., Roque Torres-Sánchez, Pedro J. Blaya-Ros, Ana B. Toledo-Moreo,
Manuel Jiménez-Buendía, and Fulgencio Soto-Valles. 2019. “Design and Calibration
of a Low-Cost SDI-12 Soil Moisture Sensor.” Sensors 19(3):491.
Guber, A. K., T. J. Gish, Y. A. Pachepsky, M. Th van Genuchten, C. S. T. Daughtry, T. J.
Nicholson, and R. E. Cady. 2008. “Temporal Stability in Soil Water Content Patterns
across Agricultural Fields.” Catena 73(1):125–33.
Gutiérrez, Joaquín, Juan Francisco Villa-Medina, Alejandra Nieto-Garibay, and Miguel Ángel
Porta-Gándara. 2013. “Automated Irrigation System Using a Wireless Sensor
Network and GPRS Module.” IEEE Transactions on Instrumentation and
Measurement 63(1):166–76.
Hanson, B. R., and K. Kaita. 1997. “Response of Electromagnetic Conductivity Meter to Soil
Salinity and Soil-Water Content.” Journal of Irrigation and Drainage Engineering

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
84
123(2):141–43.
Huang, J., F. A. Monteiro Santos, and J. Triantafilis. 2016. “Mapping Soil Water Dynamics
and a Moving Wetting Front by Spatiotemporal Inversion of Electromagnetic
Induction Data.” Water Resources Research 52(11):9131–45.
Huang, Jingyi, Ramamoorthy Purushothaman, Alex McBratney, and Helen Bramley. 2018.
“Soil Water Extraction Monitored per Plot across a Field Experiment Using Repeated
Electromagnetic Induction Surveys.” Soil Systems 2(1):11.
Huang, Jingyi, Elia Scudiero, W. Clary, D. L. Corwin, and J. Triantafilis. 2017. “Time‐lapse
Monitoring of Soil Water Content Using Electromagnetic Conductivity Imaging.”
Soil Use and Management 33(2):191–204.
Martini, Edoardo, Ulrike Werban, Steffen Zacharias, Marco Pohle, Peter Dietrich, and Ute
Wollschläger. 2017. “Repeated Electromagnetic Induction Measurements for
Mapping Soil Moisture at the Field Scale: Validation with Data from a Wireless Soil
Moisture Monitoring Network.” Hydrology and Earth System Sciences 21(1):495.
Moghadas, Davood, Khan Zaib Jadoon, and Matthew F. McCabe. 2017. “Spatiotemporal
Monitoring of Soil Water Content Profiles in an Irrigated Field Using Probabilistic
Inversion of Time-Lapse EMI Data.” Advances in Water Resources 110:238–48.
Paraskevas, C., P. Georgiou, A. Ilias, A. Panoras, and C. Babajimopoulos. 2012. “Calibration
Equations for Two Capacitance Water Content Probes.” International Agrophysics
26(3):285–93.
Reedy, Robert C., and Bridget R. Scanlon. 2003. “Soil Water Content Monitoring Using
Electromagnetic Induction.” Journal of Geotechnical and Geoenvironmental
Engineering 129(11):1028–39.
Rhoades, J. D., P. A. C. Raats, and R. J. Prather. 1976. “Effects of Liquid-Phase Electrical

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
85
Conductivity, Water Content, and Surface Conductivity on Bulk Soil Electrical
Conductivity 1.” Soil Science Society of America Journal 40(5):651–55.
Rinaldi, Michele, and Zhenli He. 2014. “Decision Support Systems to Manage Irrigation in
Agriculture.” Pp. 229–79 in Advances in agronomy. Vol. 123. Elsevier.
Robinson, David A., Hiruy Abdu, Inma Lebron, and Scott B. Jones. 2012. “Imaging of Hill-
Slope Soil Moisture Wetting Patterns in a Semi-Arid Oak Savanna Catchment Using
Time-Lapse Electromagnetic Induction.” Journal of Hydrology 416:39–49.
Rossi, Vittorio, Tito Caffi, and Francesca Salinari. 2012. “Helping Farmers Face the Increasing
Complexity of Decision-Making for Crop Protection.” Phytopathologia Mediterranea
457–79.
SAS-Sarle, W. 1983. Cubic Clustering Criterion. SAS Technical Report A-108.
Sasaki, Yutaka. 1989. “Two-Dimensional Joint Inversion of Magnetotelluric and Dipole-
Dipole Resistivity Data.” Geophysics 54(2):254–62.
Sasaki, Yutaka. 2001. “Full 3-D Inversion of Electromagnetic Data on PC.” Journal of Applied
Geophysics 46(1):45–54.
Sheets, Keith R., and Jan M. H. Hendrickx. 1995. “Noninvasive Soil Water Content
Measurement Using Electromagnetic Induction.” Water Resources Research
31(10):2401–9.
Whalley, William R., A. Binley, C. W. Watts, Peter Shanahan, Ian Charles Dodd, E. S. Ober,
R. W. Ashton, C. P. Webster, R. P. White, and Malcolm J. Hawkesford. 2017.
“Methods to Estimate Changes in Soil Water for Phenotyping Root Activity in the
Field.” Plant and Soil 415(1–2):407–22.
Zhang, Naiqian, Maohua Wang, and Ning Wang. 2002. “Precision Agriculture—a Worldwide

Chapter 3: Temporal Analysis of Soil Water Extraction by Different Genotypes of Chickpeas Using EMI Surveys
86
Overview.” Computers and Electronics in Agriculture 36(2–3):113–32.

87
CHAPTER 4
VISNIR PENETROMETER SYSTEM FOR PREDICTING SOIL
CARBON

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
88
4.1 Summary
Soils are one of the main carbon sources and contain more carbon than the combined total in
the atmosphere and terrestrial vegetation. Protecting and monitoring soil organic carbon (SOC)
stocks at national and global levels can help to preserve biodiversity and ecosystem function
while boosting soil productivity and increasing resilience to floods and drought. The
sequestration of atmospheric C as SOC can play a vital role in mitigating global warming by
reducing atmospheric carbon dioxide. In this study, a visible and near-infrared (VisNIR)
penetrometer system was developed to automatically measure in-situ soil VisNIR reflectance
spectra and depth of insertion along with soil profile. This VisNIR penetrometer system rapidly
measures soil properties at fine-depth-resolution without collecting soil cores from the field
and preparing soil samples in the laboratory. In this study, a spectral library with 1,826 SOC
observations and corresponding VisNIR spectra of soil in air-dry and ground condition was
used to calibrate Cubist regression models for both field-moist and dry spectra. Two external
parameter orthogonalisation (EPO) projection matrices were constructed from the dried soil
VisNIR spectra with moist core (local) and field VisNIR spectra (penetrometer) based on the
optimum numbers of components from Wilks’ Λ test and applied to the in-situ spectra to
remove the effects of soil moisture and other in-situ effects from the spectra. This penetrometer
system was used to estimate SOC at three sites on three different days, each chosen based on
rainfall incidences to predict SOC content under variable soil moisture conditions at
Lansdowne Farm, New South Wales, Australia. External validation was performed using SOC
contents measured at 10 cm depth intervals and also an additional 0-2 cm depth observation
due to the very high SOC observed at this depth. The penetrometer EPO performed better
compared to the local EPO constructed from moist cores. The predicted SOC contents were
validated against the SOC content of 33 samples measured in the laboratory using the Walkley-
Black method with mean R2, RMSE, and bias of 0.88, 0.32 and 0.15, respectively. It is

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
89
concluded that the in-situ VisNIR penetrometer can potentially be used to measure SOC
content rapidly and cost-effectively in situ with a high vertical resolution.
4.2 Introduction
Soil organic carbon (SOC) content is an important indicator of soil condition (Killham &
Staddon, 2002). Biodiversity, nutrient, and waste cycling ecosystem processes will be
compromised if SOC drops below critical levels (Power, 2010). SOC is vital for microflora as
different organisms use it as a source of energy and nutrition (Lescure et al., 2016). These
organic materials are cycled through the soil and used by organisms as sources of energy and
nutrients. Increased SOC content increases energy supply for all microorganisms (microbes,
macrofauna, earthworms, etc.) and nutrient supply to plants (Metcalfe & Bui, 2017). SOC also
helps aggregate soil particles and increase soil structure stability, which improves the water
storage capacity (Carter, 2004). SOC also stabilises the thermal properties of soil and maintains
pH buffering (Metcalfe & Bui, 2017). Unfortunately, land-clearing and production on the
world’s arable soils have resulted in an estimated release of 50 Gt C (186 Gt of CO2) to the
Earth’s atmosphere (Smith et al., 2015). The current world population is expected to reach 8
billion by the year 2025 (Scherbov, Lutz, & Sanderson, 2011). Crop yields must be increased
to support this population growth while minimising ecological damage.
Soil carbon sequestration can be a potential solution to reduce levels of atmospheric CO2 while
also providing benefits for soil formation, soil fertility, and increases yield potential
(Körschens, 2002). Soil carbon sequestration reduces greenhouse gas from the atmosphere by
storing carbon root, stem, and leaf material of pasture grasses and crops, which may mitigate
global warming (Irving 2015; Fornara et al. 2011). Carbon farming benefits landowners by
increasing agricultural production, and profitability (Gerrand, Keenan, Kanowski, & Stanton,
2003).

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
90
Paying landholders to sequester additional SOC on their land has been promoted as a mutually
beneficial solution for the climate, crop production, and ecosystem services (Brown, Miller,
Ordonez, & Baylis, 2018; K. M. A. Chan, Anderson, Chapman, Jespersen, & Olmsted, 2017;
Heal & Small, 2002; Nelson, 2009). The cost of SOC auditing has been a factor limiting further
uptake, and new methods must be developed to make the process more cost-effective to
promote wider adoption (J J de Gruijter, Wheeler, & Malone, 2019; Jaap J de Gruijter et al.,
2018; Smith et al., 2020). Conventional methods to quantify SOC in the laboratory are time-
consuming, expensive, and destructive in nature. As soils vary vertically as well as laterally,
soil information must be collected at distinct locations and at different depths below the soil
surface (Mubarak, Mailhol, Angulo-Jaramillo, Ruelle, et al., 2009; Ovalles & Collins, 1986).
An ideal method to calculate SOC stock a rapid and accurate soil, organic measurement
technique is required. Research into the acquisition of high-resolution soil data with accurate
information of spatial variability that can be obtained in a timely manner is increasing in
various disciplines of precision agriculture, digital soil mapping, crop and yield modelling
(Behrens & Scholten, 2006; Camera et al., 2017; J. Liu et al., 2007; A. B. McBratney et al.,
2003; Semenov, 2004; Viscarra Rossel et al., 2010; Zhao et al., 2020).
Visible and near-infrared (VisNIR) soil spectra have been investigated as a rapid and cost-
effective method to accurately predict many soil properties simultaneously, including SOC,
clay content, moisture, total N, and CEC (Chang, Laird, & Hurburgh Jr, 2005; Chang, Laird,
Mausbach, & Hurburgh, 2001; Kusumo et al., 2008; Rossel et al., 2009; Rossel, Walvoort,
McBratney, Janik, & Skjemstad, 2006). As a replacement of laboratory measurement of SOC,
VisNIR spectroscopy can be successfully used to predict SOC more cost-effectively and
efficiently (R2 = 0.96, RPIQ = 5.83) (Guo et al. 2019).
While most studies using VisNIR are mainly conducted in the laboratory by scanning air-dried
soil under a controlled environment, recent studies have used VisNIR spectroscopy in-situ and

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
91
as rapid on-the-go measurements of soil properties (Angelopoulou, Balafoutis, Zalidis, &
Bochtis, 2020; Hutengs, Seidel, Oertel, Ludwig, & Vohland, 2019; Pei, Sudduth, Veum, & Li,
2019). In particular, NIR spectroscopy has become very popular for predicting soil organic
carbon (SOC) for soil carbon sequestration and quality assessment for agricultural purposes
(Morellos et al., 2016; Nocita et al., 2014; Stevens et al., 2013; Stockmann et al., 2015). This
technique can provide cheap and rapid estimation in the field. Ben-Dor et al. (2008) developed
a device that can be inserted into the pre-excavated holes to collect soil VisNIR spectra in-situ.
Chang et al. (2011) modified this technique to predict soil SOC using a new micro-optical
sensor probe. The optical probe consists of two microfabricated source chips that include a
side-viewing function that enables recording of in-field VisNIR spectra. Rossel et al. (2009)
attempted to scan VisNIR spectra on soil profiles exposed during sampling pit-excavation to
predict clay content and found slightly better accuracy compared to soil spectra collected under
laboratory conditions. Though this method provides higher accuracy, it still involves
excavating the soil during the field tests.
Challenges to in-situ use include differences in the ambient temperature of the atmosphere and
pedosphere, soil heterogeneity, macro-aggregation, and soil moisture variability as sensors
moving through the surface of the soil experience inconsistency in the soil presentation and
smearing (Christy, 2008; Morgan, Waiser, Brown, & Hallmark, 2009; Waiser, Morgan, Brown,
& Hallmark, 2007). A study was conducted by Mouazen et al. (2005) to develop a fiber- type
VisNIR spectrometer attached to the back of the chisel tine that was able to scan soil surface
as it was dragged through the topsoil layer, and a significant correlation was found with soil
carbon, pH, and P using a cross-validation technique (Mouazen et al. 2007). Bricklemyer &
Brown (2010) found that soil SOC and clay content predicted from the in-situ VisNIR spectra
are less accurate than VisNIR from laboratory tests. They used a commercially available on-
the-go VisNIR sensor (Veris Technologies Inc., Salinas, Kansas, USA) which was attached to

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
92
an agricultural shank pulled by a tractor. Other studies indicate that SOC, pH, electrical
conductivity, moisture content, CEC, TC, and other properties can be predicted using a real-
time VisNIR spectrometer attached to a tractor and use for mapping purposes (Kodaira &
Shibusawa, 2013).
In the field, many external environmental parameters, such as ambient temperature, soil
moisture, and soil surface conditions (aggregate size or roughness) may produce unwanted
effects on the quality of VisNIR reflectance spectra. Soil moisture has a significant impact on
the VisNIR spectra, and SOC predicted on the same soil, but at different moisture content can
vary by up to 1% (Minasny et al., 2011). For this reason, the variability of field soil moisture
can decrease the accuracy of SOC estimation from VisNIR spectra of field samples (Minasny
et al., 2011; Morgan et al., 2009). Few studies have been conducted where a wide range of
water content was included in the calibration set to predict soil SOC. However, the accuracy
of the SOC prediction was not satisfactory. To estimate soil SOC from moisture-affected soil
spectra, external parameter orthogonalisation (EPO) technique was introduced by Minasny et
al. (2011). The EPO algorithm, originally developed by Roger et al. (2003), projects VisNIR
spectra into a new space orthogonal to the undesirable variation introduced by variable soil
moisture. The use of EPO has been demonstrated to reduce the effect of variable moisture on
the prediction of SOC, clay,and other soil properties (Abdul Munnaf, Nawar, & Mouazen,
2019; Ackerson, Demattê, & Morgan, 2015; Minasny et al., 2011; Roudier, Hedley, Lobsey,
Rossel, & Leroux, 2017).
Ackerson et al. (2017) attempted to predict soil clay content using a custom-made VisNIR
penetrometer. The study was conducted on 20 locations from the terrace, seven from
floodplains, and six from upland locations in Burleson and Brazos counties, Texas, USA. In
the study, a Texas soil spectra library was used together with EPO transformation to reduce the
moisture effect and allows the correlation models calibrated on dry ground samples to predict

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
93
using spectra taken from moist samples in situ (Ge, Morgan, & Ackerson, 2014; Minasny et
al., 2011). PLSR models were used to predict clay content from EPO transformed in-situ
spectra with the accuracy of RMSE, bias, and R2 of 88 g kg−1, −15 g kg−1, and 0.76. In a
continuation of this research work, the penetrometer was modified by adding a load cell to
measure driven force, a GPS module, and an ultrasonic depth sensor for real-time depth
measurement (Wijewardane, Hetrick, Ackerson, Morgan, & Ge, 2020). Using this system, the
predicted R2 and RMSE were found to be 0.50 and 0.79% for total carbon. R2 and RMSE were
0.62 and 0.06% for total nitrogen and 0.80 and 0.12 g cm−3 for bulk density.
The use of VisNIR penetrometers to provide high vertical resolution soil information is
promising, but the technology has not been thoroughly tested for Australian soil types and
variable moisture conditions. In this study, a VisNIR penetrometer system was developed and
tested for in-situ, high-resolution vertical soil sensing and estimation of SOC levels using
calibrations developed from an existing spectral library. To be suitable for field applications,
the system must be robust enough to provide accurate estimations of SOC content independent
of soil type and variability of in-field moisture content at the investigation site.
4.3 Materials and Methods
4.3.1 VisNIR penetrometer system
This study investigated the in-situ estimation of SOC using a truck-bed skid-mounted VisNIR
penetrometer system. The VisNIR penetrometer consisted of a penetrometer head housing a
halogen lamp and a fibre-optic cable to collect and transmit reflectance photons from below
the soil surface through the penetrometer shaft to an above-ground spectrometer. It also had an
ultrasonic depth sensor to record insertion depth. The penetrometer head was constructed of
stainless steel with an external diameter of ⌀ 32.5 mm and length of 900 mm, including a
removable tip in the shape of a cone to reduce penetration resistance, as shown in Figure 1.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
94
The penetrometer head housed an optical module containing a broad-spectrum halogen light
source (MR4-188, International Light Technologies, Peabody, MA, USA) and parabolic mirror
(MPD019-G01, Thorlabs Inc, Newton, NJ, USA) to direct light from the lamp through a
sapphire window into the pedosphere. Diffuse reflectance spectra from the soil immediately
external to the sapphire window returned through the sapphire window. A fibre-optic cable
mounted inside the optical module at a 45° angle to the illuminated soil surface captured and
returned some of this light to the surface through a 3 m long ruggedized fiber optic cable to an
above-ground ASD AgriSpec spectroradiometer (ASD, Malvern Panalytical, Longmont, CO,
USA).
The fibre-optic bundle and power wires for the halogen lamp were enclosed within a connector
rod machined from high carbon steel hollow bar that connected the penetrometer head to the
mandrel and the hydraulic system. The external diameter of the bar was 30 mm, and the internal
diameter was 13 mm. This bar was specially designed to withstand the typically dry soil
condition of the south-west part of Sydney, New South Wales. The penetrometer had a
maximum insertion depth of 107 cm, and as the sapphire window was recessed from the tip of
the penetrometer head, the maximum reading depth was 90 mm. An ultrasonic distance sensor
(ToughSonic14, Senix Corp., Hinesburg, VT, USA) mounted on a bracket attached
perpendicular to the penetrometer shaft and directed towards the soil surface provided a
reading of the height of the sensor above the ground as the penetrometer was inserted into the
soil.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
95
Figure 4.1. VisNIR penetrometer with ultrasonic depth sensor
Additional hardware required included a laptop computer, a data logger, a voltage regulator, a
voltage converter, and a 12 V deep-cycle battery. A voltage regulator provided a stable 12 V
power supply from the battery to ancillary power circuits. A DC-DC voltage converter was
used to step up the power to control the 24 V ultrasonic depth sensor. A variable resistor was
used to control the light source's voltage to adjust the intensity of the halogen light from the
main circuit board, and a switch was used to cut the power supply to the light source completely
when taking a dark reference reading. A LabJack U6 (LabJack Corporation, Lakewood, CO
80227 USA) multifunctional data acquisition device was used to receive and log concurrent
spectra and depth measurements. A program was written in LABVIEW (National Instruments,
11500, Austin, USA) to control and monitor data acquisition. The advantage of using the
LABVIEW program is the user-friendly graphical interface that enables to control the VisNIR
and ultrasonic distance sensor with the display of real-time measurements, including in-situ
soil spectra and insertion depth.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
96
The ASD spectroradiometer, main circuit, and 12 V battery were stored inside a protective box,
as shown in Figure 4.2. Ventilation of hot air was provided by two cooling fans that pushed hot
air out of exhaust vents to maintain a reasonable working temperature inside the box to reduce
effects on the measurement of the spectra.
Figure 4.2. Instrumentation box including ASD spectroradiometer, circuit board and 12-volt
battery.
4.3.2 Field experiments to collect VisNIR spectra using the penetrometer system
4.3.2.1 Study site
Field experiments were conducted to test the system at three sites located on Lansdowne Farm,
Cobbitty, NSW, Australia (34°01’24” S, 150°39’48” E) (Figure 4.3). The three sites identified
were known to encompass a range of soil types, textures, and organic carbon contents (Table
4.1). The three sites occupied distinct landscape positions. Site 1 was located on low-rise, and
10.2% clay measured in the Ap1 horizon was the lowest observed at all sites. The site had
previously undergone cultivation but had been under pasture cover for five years prior to
sampling. Site 2 was situated in a floodplain depression giving it a fine-grained alluvium parent
material and the highest observed clay content of 38.9% in the Bt2 horizon. Site 3 was located
on an undisturbed levee bank and subsequently had the highest SOC content of all sites.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
97
Figure 4.3 Locations of sampling sites on Lansdowne Farm, within Australia and in relation to
New South Wales.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
98
Field experiments were conducted on three separate days over a 29 day period, namely
23/01/2020, 31/01/2020, and 18/02/2020. Sampling days were chosen reactively to rainfall
incidences to test the robustness of predictions under variable soil moisture conditions. Soil
moisture has unfavorable effects on the accuracy of predictions with VisNIR spectra and is one
of the main limitations to field use.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
99
Table 4.1. A summary of the types of soil samples analysed different sites.
*CL, clay loam; CS, clayey sand; LMC, light-medium clay; SCL, sandy clay loam; SL, sandyloam.**silt-sand threshold of 20 µm.
Site
ID
Hor
izon
Upp
er
dept
h
(cm
)
Low
er
dept
h
(cm
)
Tex
ture
* C
lay
(g 1
00 g
-1)
Silt**
(g 1
00 g
-1)
Sand
**
(g 1
00 g
-1)
pHc
EC
(dS
m-1
) O
C
(g 1
00 g
-1)
1
Bro
wn
Kan
doso
l
Ap1
0
12
CS
10.2
3.
6 86
.3
5.58
0.
07
0.52
Ap2
12
30
C
S 10
.7
4.8
84.5
5.
76
0.13
0.
32
Bw
30
50
SL
14
.4
3.7
81.9
5.
68
0.03
0.
20
Bc
50
100
SL
16.6
4.
5 78
.9
5.95
0.
03
0.18
2
Red
Der
mos
ol
Ap
0 23
C
L 28
.2
17.8
54
.0
5.41
0.
06
0.79
Bt1
23
45
LM
C
37.2
18
.6
44.2
6.
03
0.03
0.
43
Bt2
45
10
0 LM
C
38.9
18
.0
43.1
6.
19
0.04
<0
.15
3
Red
Ten
osol
A
0 16
SC
L 18
.4
12.5
69
.1
5.08
0.
10
2.97
Bw
1 16
31
C
L 21
.1
11.5
67
.4
4.74
0.
08
0.90
Bw
2 31
48
C
L 22
.8
7.8
69.4
5.
17
0.06
0.
24
2Bw
1 48
73
SC
L 18
.4
5.5
76.1
5.
24
0.05
<0
.15
2Bw
2 73
10
0 SL
12
.4
4.4
83.2
5.
38
0.06
<0
.15

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
100
4.3.2.2 Penetrometer operation and field sampling
The penetrometer was attached via a modified mandrel drive with the Atlas hydraulic system
skid-mounted in the bed of a truck. The percussive hammer function was disabled to ensure
the penetrometer was inserted smoothly into the soil and reduce the potential for hardware
failure. Insertion force was provided by a hydraulic system skid mounted on the bed of a 2.5-
tonne truck (Figure 4.4). The direct location of insertion was cleared of plants, litter, and debris
to expose the very top of the A horizon. An area directly below the ultrasonic distance sensor
was also cleared of tall plants to prevent movement induced by wind interfering with insertion
depth calculations. Immediately before insertion, the penetrometer was calibrated utilising a
Spectralon (Labsphere, North Sutton, NH 03260 US) tile held flush on the sapphire window
for the baseline reading, and a dark reference reading was also obtained with the halogen lamp
switched off and the sapphire window covered. The penetrometer was inserted into the soil
until the sapphire window was just below the soil surface, giving an initial reading depth
centered at ~5 mm depth. Once in position, the ultrasonic distance sensor depth was zeroed and
recording of VisNIR spectra was initiated. The penetrometer was inserted in by ~2 cm
increments in the first 30 cm depth and then by ~5 cm increments to the maximum reading
depth of 85 cm. A pause of 10 seconds between insertion events facilitated the capture of
multiple, high-quality spectra over the 350-2,500 nm wavelength range at each depth interval
while the penetrometer system was stationary. The penetrometer's final insertion depth was
also recorded for each location and compared with the insertion depth recorded from the
distance sensor. The second reading of the Spectralon tile was taken immediately following
sampling to assess calibration stability.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
101
Figure 4.4. Operation of VisNIR penetrometer system in the field
Three penetrometer insertions were made at each sampling site on each sampling day. The
insertion points were spaced linearly 50 cm apart. Two 50.8 mm diameter soil cores were
collected to a depth of 1 m from the middle of the insertion points, as shown in Figure 4.5.
Measurements taken on subsequent days were spaced 50 cm away from the first day to limit
the effects of soil variability on observed carbon values. Extracted soil cores were immediately
wrapped in polypropylene tubing to conserve field moist conditions while transporting samples
back to the laboratory. An additional 0 to 2 cm sample was obtained as SOC often follows an
exponential decay function with depth. If taken as a bulk value, contents at lower depths may
dilute the high SOC contents of the upper topsoil.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
102
Figure 4.5 Sampling Scheme of all three sites at different days
4.3.3 Laboratory processing
Extracted soil cores were processed back in the laboratory each day following sampling. To
provide a point of comparison with the penetrometer system, one of the soil cores was cut
lengthways and VisNIR spectra were acquired on the core at 2 cm increments using a contact
probe with an inbuilt halogen lamp attached via fibre-optic bundle. This laboratory-based scan
used the same ASD spectroradiometer as the penetrometer system. The second core was
divided into 10 cm depth segments and used to calculate soil wetness at air-dry (40°C) and
oven-dry (105°C) conditions. The split soil core on which VisNIR spectra were obtained was
then dried at 40°C, and VisNIR spectra were again acquired at 2 cm increments in an air-dried
state. Once soil cores from the third day had been processed, a composite sample from the three
air-dried cores at each site was obtained at 10 cm depth segments to 1 m. The 0 to 2 cm depth
samples and the ten composite samples per site were ground and passed through a 2 mm sieve.
Triplicate VisNIR readings were acquired on the 33 samples in the dry-ground state, and

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
103
organic carbon was quantified for each sample using the Walkley-Black method (Walkley and
Black, 1934).
4.3.4 VisNIR processing and estimation of SOC
All VisNIR processing, model calibration, and validation were performed in R (R Core Team,
2019). Organic carbon estimates were produced under the four different soil conditions for
comparison, namely: penetrometer collected, field-moist core, air-dry core, and dry-ground
composite sample. Each condition required a unique combination of pre-processing, external
parameter orthogonalisation (EPO) for field-moist condition, application of predictive models,
and depth aggregation prior to validation with observed SOC values (Figure 4.6). An existing
spectral library with 1,826 SOC observations and matching VisNIR spectra in air-dry and
ground condition was used to calibrate predictive models for both field-moist and dry spectra
in the form of Cubist regression models (Kuhn and Quinlan, 2020). The spectra in the library
underwent distinct pre-processing and transformation for each condition to match the pre-
processing of acquired spectra, as described below. SOC was log-transformed prior to
modeling, and estimations were back-transformed prior to the calculation of validation
statistics.
Field penetrometer spectra
Spectra acquired with the penetrometer first had to be screened for abnormal spectra associated
with plant roots and debris that are present in, but separate from, the soil and not represented
in the spectral library. This matches standard laboratory procedures to remove visible plant
roots during the drying and grinding process that would otherwise artificially increase observed
SOC carbon levels. Spectra were converted to absorbance, A = log(1/R), then smoothed with
a Savitzky-Golay filter comprising of window size of 11 and a second-order polynomial. Low
signal:noise ratio areas of the spectrum were removed to leave the 500 to 2450 nm wavelength

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
104
range, which was resampled at 2 nm resolution. A baseline correction was performed utilising
a standard normal variate transformation. An EPO transformation matrix was used to project
spectra into a space orthogonal to the effect of soil moisture before resampling at 10 nm
intervals (Roger et al. 2003; Minasny et al. 2011; Wijewardane, Ge, & Morgan, 2016; S Veum,
A Parker, A Sudduth, & H Holan, 2018). Pausing during insertion to acquire spectra while the
penetrometer was stationary meant that there was no need to smooth spectra between sequential
readings. Predictive models were applied to estimate SOC content for each reading, and as
readings were not taken on strict depth intervals, local polynomial regression was used to
smooth readings for each insertion. The fitted smoothing line was sampled at 1 cm intervals
and averaged at the corresponding depth segment of observed SOC values. Aggregated values
were averaged between insertions and days for comparison.
Moist core spectra
Moist core spectra were also converted to absorbance and smoothed with a Savitzky-Golay
filter (window size of 11 and a second-order polynomial). Then the spectra were trimmed 500
to 2450 nm wavelength to get rid of low signal:noise ratio areas. Then the spectrum was
resampled at 10 nm resolution before applying a baseline correction. After that local EPO
transformation matrix was applied for the analysis where EPO matrix was used to reduce the
moisture effect from the NIR spectrum. SOC was also predicted without applying EPO matrix
in the NIR spectrum, where this step of applying EPO was skipped.
Air-dried core spectra
Air-dried core spectra were converted to absorbance, A = log(1/R), then smoothed with a
Savitzky-Golay filter comprising of window size of 11 and a second-order polynomial. Low
signal:noise ratio areas of the spectrum were removed to leave the 500 to 2450 nm wavelength
range, which was resampled at 10 nm resolution. A baseline correction was performed utilising

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
105
a standard normal variate transformation. Predictive models were applied, and as readings were
taken on strict 2 cm intervals, the predicted SOC contents were aggregated by directly
averaging all samples within a given depth segment before validation with observed SOC
values.
Air-dried ground spectra
Soil cores obtained from each site at various day of insertions were divided into 10 cm segments
and grounded before passing through 2 mm sieve. The ground samples were scanned using the
contact probe in the laboratory. Spectra obtained on ground composite samples were processed
in a similar manner to air-dry core spectra except averaging triplicate spectra as the first step
in pre-processing, and SOC estimations did not have to be aggregated as readings were taken
directly on the ground samples used for SOC quantification.
Figure 4.6 Methodology scheme of complete study from NIR scans to validations of
predicted soil organic carbon (SOC).

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
106
4.3.5 Calculation of SOC stock
SOC stock was calculated from the SOC predicted using VisNIR spectra collect from
penetrometer insertions. SOC stock to a given depth was calculated by summation of SOC for
contributing depth increments using the following equation, bulk density was provided at 10
cm, and no coarse fragments were present in the soils investigated,
𝑆𝑆𝑆𝑆𝐶𝐶 𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠 (𝑠𝑠 ℎ𝑎𝑎−1) = ∑ 𝑆𝑆𝐶𝐶𝑖𝑖 × 𝐵𝐵𝐵𝐵𝑖𝑖 × 𝑠𝑠𝑖𝑖𝑑𝑑𝑖𝑖=1 × 10000 (1)
Where,
𝑑𝑑 = number of depth increments
𝑆𝑆𝐶𝐶𝑖𝑖 = organic content (g g-1) of depth increment i
𝐵𝐵𝐵𝐵𝑖𝑖 = bulk density (Mg m-3) of depth increment i
𝑠𝑠𝑖𝑖 = thickness of depth increment i (m)
4.3.6 Validation and other statistics
In this study, the coefficient of determination (R2), root-mean-square error (RMSE), bias, and
corrected RMSE (RMSEc) were determined for the calibration between soil dry core spectra
and SOC. These statistics were also used for validation of SOC predicted from moist cores and
VisNIR penetrometer system. The coefficient of determination (R2) is the proportion of the
variance in the SOC that is predictable from soil spectra. Root-mean-square error (RMSE) is a
measure of the differences between SOC predicted by a cubist regression model and the
observed SOC. Bias is a measure of the expected value of the SOC differs from the estimated
SOC. RMSEc measures the goodness of fit between predicted and actual SOC. These statistics
were also used to validate the calibration models by comparing the predicted SOC with the
observed SOC measured from the 33 samples in the laboratory.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
107
4.4 Results and Discussion
4.4.1 Performance of VisNIR penetrometer system
The VisNIR penetrometer system was used in three different locations of Lansdowne Farm,
Cobbitty, NSW. The penetrometer system was tested at the same sites on three separate days
selected based on rainfall incidences to maximise the variability in soil moisture. The
maximum depth of insertions varied between 70 cm and 90 cm depending on soil moisture
conditions. The comparisons between dry and moist core spectra are shown in Figure 4.7a. The
mean dry soil spectra have higher reflectance than mean spectra from moist cores, but similar
features were observed between the dry and moist core spectra (i.e. broad absorbance features
between 1300–1500 nm, 1800–2000 nm, and 2150-2300 nm). The soil spectra collected using
VisNIR penetrometer (Figure 4.7b) have a higher variation compared to the soil spectra
collected in the laboratory. A number of distinct VisNIR reflectance patterns with higher
reflectance, particularly in the visible range, were recorded using the penetrometer system.
These spectra were not observed in the moist and dry core samples of Figure 4.7a, and believed
to be due to living plant roots, and fresh plant debris.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
108
(a)
(b)
Figure 4.7 Soil VisNIR spectra collected from (a) dry and the moist cores in the laboratory and
(b) using VisNIR penetrometer system in the field. Mean spectra of dry and moist cores were
plotted for laboratory measurements.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
109
4.4.2 EPO transformation matrices
A number of EPO projection matrices (local and penetrometer) were constructed to test
different scenarios based on the optimum numbers of components from Wilks’ Λ test. The
effects of these EPO matrices on the improvement of calibration and validation statistics were
analysed.
The local EPO transformation matrix was constructed using VisNIR spectra from the moist
and dried soil cores collected from the Lansdowne farm, Cobbitty, NSW. After the collection,
soil cores were transported to the laboratory, and VisNIR scans of the half-cut cores were
scanned with the handheld ASD spectroradiometer. Then these cores were air-dried at 40°C
for 48 hours before scanning the dry cores.
The penetrometer EPO transformation matrix was built using VisNIR spectra recorded in the
field using the penetrometer and dried soil cores collected from the Lansdowne farm, Cobbitty,
NSW. Soil cores were transported in the laboratory and air-dried at 40°C for 48 hours. Half-
cut dry core VisNIR scans were recorded using a contact probe in the laboratory.
The number of components used in the construction of EPO transformation matrices was
selected based on the similarity of the transformed spectra of two or more moisture contents
with the sample spectra known as the Wilks’ Λ (Roger et al., 2003). It is a cluster separation
metric calculated by the ratio between the inter-group variance and the total variance (Webster,
1971). In this study, two (local and penetrometer) EPO transformation matrices were used for
removing the effect of the soil moisture from the NIR spectra.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
110
Figure 4.8. Wilks’ Λ for a different number of principal components from NIR spectra from
sampling sites (local EPO) and combined NIR spectra from sampling sites (penetrometer EPO)
For both EPO transformation matrices, the first maximum Wilks’ Λ were found for two
principal components, as shown in Figures 4.8. So, EPO transformation matrices were
constructed using two principal components.
Ideally, an EPO would not be constructed for each study, and it is believed an EPO projection
matrix could be generalised with increased observations. However, it was found that using the
EPO constructed from moist and dry soil cores did not work adequately for the spectra collected
in the field using the penetrometer system. It was hypothesised that the unique effects of
moisture content are produced when using a penetrometer system as the pressure induced by
the insertion of the penetrometer forces additional moisture out of the pore space. In addition,
the pushed penetrometer can produce a smearing effect on soil surfaces.
The projection matrices displayed in Figure 4.9 shows the elements where the spectra were
transformed in the wet scans from the moist split cores and the penetrometer system. High

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
111
positive values were found within 500 -600 nm and 1900- 2000 nm in the EPO transformation
matrix from moist cores. EPO transformation matrix from the penetrometer system shows a
moderate value (0.4-0.5) within 600 -800 nm and a high value within 1850 -2100 nm. Moist
core (local) EPO transformation matrix was highlighted by large positive values, indicating
more spectra regions were transformed compared to the penetrometer transformation matrix.
After the transformation, the deleterious effect of variable soil moisture was reduced and the
calibrated SOC models could be applied to the transformed spectra .
(a) (b)
Figure 4.9. A comparison of EPO projection matrices developed using VisNIR spectra of a)
moist cores (local) and b) the penetrometer system. The reference state in both cases were
VisNIR spectra of split, air-dried (40°C) soil cores.
4.4.3 Calibration and validation between soil VisNIR spectra and SOC
Cubist regression models were constructed to estimate SOC from 1826 observations of SOC
and corresponding VisNIR spectra in dry-ground conditions for both field-moist and dry
spectra. The predicted SOC were aggregated at the matching depth segment of observed OC

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
112
values. Then these aggregated values were averaged between the number of insertions and days
of measurements for comparison. Validation of predicted SOC was done by comparing with
the SOC of 33 samples measured in the laboratory. Estimated SOC values were aggregated by
depth to the corresponding laboratory-based observations where appropriate.
4.4.3.1 Dry cores
The calibration statistics are shown in Table 4.2. Reasonably good R2 (0.81) and low RMSE
(0.20 %) were observed from this model. The corrected RMSE was exactly the same as RMSE
as no bias was observed in this analysis.
Table 4.2. Calibration and validation statistics for dry cores
Spectra source R2 LCCC RMSE (%) Bias (%) RMSEc (%)
Spectral library (calibration) 0.81 0.89 0.20 -0.02 0.20
Dry-ground (validation) 0.93 0.80 0.36 0.01 0.36
Dry core (average 3 cores) (validation) 0.94 0.85 0.32 0.13 0.29
Validation was done with both the soil VisNIR spectra collected from the dry ground samples
and dry cores. High R2 (0.94) was found for both the dry ground samples and the dry cores. An
improvement in the RMSE was found for the dry core compared to the ground samples.
Slightly less accurate prediction of the two high SOC samples caused higher RMSE for dry-
ground samples, which were modelled better on the dry cores. Samples with SOC <2% were
modelled more accurately with the dry-ground samples, which may be attributable to the
greater representation of such samples in the calibration library. After the corrections for bias,

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
113
RMSEc becomes 0.29 % for dry cores, but for ground samples, RMSEc remains the same
(0.36).
Ogrič et al. (2019) used dry-ground 173 samples and different approaches based on the
calibration subset, validation subset, and selection method. Mean R2 for calibration and
validation was found to be 0.90 and 0.84 from Partial Least Squares Regression (PLSR) model,
respectively. The R2 for the calibration model from the spectral library (0.81) was slightly
lower than the mean R2 found from the study by Ogrič. But better R2 was found for the
validation model from dry cores compared to the mean R2 calculated in this study.
Jia et al. (2017) used 24 soil cores of 1 m and recorded field-moist intact VisNIR and air-dried
ground VisNIR for every 5 cm interval to predict SOC using PLSR and a Support Vector
Machine (SVM). Both validation R2 from SVM (0.86) and PLSR (0.72) was lower than the R2
found from the dry core and dry-ground samples.
For both observed and predicted SOC depth profiles of various days and three sites are shown
in Figure 4.10. Site 3 has the highest SOC (about 0.15% - 3.08%) and the lowest SOC (0.15%
- 1.88 %) was found for site 1. A higher bias was observed between the predicted and observed
SOC for all three days on site 1, and the least bias was observed in site 3.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
114
Figure 4.10. Depth profile of observed and predicted SOC from a single dry core extracted on
three different days for all three sites. For spectroscopic measurement, predicted SOC was
plotted for every 2 cm. For lab measurements, SOC of 10 cm homogenised depth samples and
an additional 0-2 cm topsoil samples were plotted against depths.
4.4.3.2 Moist Cores
VisNIR scans from moist soil cores collected from the insertion sites merged with scans from
the spectral library were used to construct soil moist core calibration models using cubist
regression analysis. R2 and RMSE were found to be 0.80 and 0.21%, respectively, with a
considerably low bias of -0.02%.
The calibration model was used to predict SOC and validated with the actual SOC measured
in the laboratory. Using field spectra without EPO transformation, the determination coefficient
reduced (0.82) and a comparatively high RMSE (0.59%) was observed, as found from the
validation statistics between predicted and observed SOC. Another validation was done with

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
115
the scans from moist cores when the local EPO transformation matrix from moist to dry cores
was used to minimise the effect of soil moisture from the moist soil scans. After the application
of local EPO, improved R2, and reduced RMSE of 0.88 and 0.54% were observed. The bias
was -0.07%, and the corrected RMSE was reduced by 0.05%.
Jia et al. (2017) used field-moist intact VisNIR to predict SOC, and reported validation R2 from
SVM, and PLSR to be 0.81 and 0.67, respectively. The validation R2 for the moist core without
applying the EPO transformation matrix was 0.82, which is almost similar to Jia's study. But
validation statistics (R2 = 0.88) were much improved after applying the local EPO matrix. Since
EPO transformation was not applied with the field-moist intact VisNIR, the validation statistics
were not as promising as this study.
Liu et al. (2020) used spectra angle of EPO (EPO-SA) to study whether other inherent soil
properties such as clay content, organic matter etc get removed by the EPO transformation
process by investigating the shape of the external part of the spectra. It was found that, the
external spectra were not related to any other soil properties but, soil moisture was quantitavely
predicted with R2 = 0.77 and RMSE = 0.09 g kg-1.
Table 4.3. Calibration and validation statistics for moist cores
Spectra source R2 LCCC RMSE (%) Bias (%) RMSEc (%)
Spectral library EPO transformed (calibration)
0.80 0.88 0.21 -0.02 0.21
Moist core (No EPO) (validation) 0.82 0.41 0.59 0.06 0.59
Moist core (local EPO) (validation) 0.88 0.51 0.54 -0.07 0.54

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
116
Figure 4.11 shows the observed and predicted SOC depth profile for high, medium, and low
soil wetness values, which correspond to the collection of soil cores on three different days
from all the sites. For site 3, high SOC was found within 0-10 cm in the laboratory, but from
the prediction, the maximum SOC at that depth was around 2%. Comparatively lower SOC
was found for site 1 than site 2.
Figure 4.11. Depth profile of observed and predicted SOC from moist (with local EPO) cores
at different days for all three sites. For spectroscopic measurement, predicted SOC was plotted
for every 2 cm. For lab measurements, SOC of 10 cm homogenised depth samples and an
additional 0-2 cm topsoil samples were plotted against depths.
4.4.3.3 VisNIR penetrometer system
Without EPO transformation
VisNIR penetrometer was used to acquire in-situ soil spectra from all three sites on three
different days. Field spectra (without EPO transformation) collected using the penetrometer

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
117
was used to calibrate against SOC. The R2 and RMSE of the calibration model were found to
be 0.88 and 0.24%, respectively (Table 4.4).
Table 4.4. Calibration statistics from VisNIR penetrometer (without EPO)
Spectra source R2 LCCC RMSE (%) Bias (%) RMSEc (%)
Spectral library (Without EPO transformation) 0.88 0.94 0.24 0.01 0.24
From the validation statistics obtained with the calibration model with raw spectra, the mean
R2 with all sites and days was 0.67, even though the mean R2 of different days for each site
varies within 0.86 – 0.93. For separate sites, RMSE varied between 0.39-0.88%, but overall,
RMSE was 0.58%. Comparatively, low bias was observed for sandy clay loams at site 3, and
high bias was found on site 2, which comprises mostly medium clay soils from 0.5 m – 1 m
(Table 4.5).

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
118
Table 4.5. Validation statistics for Penetrometer insertion (without EPO)
Sites R2 LCCC
RMSE (%) Bias (%) RMSEc
(%)
Mean (all sites and days) 0.67 0.65 0.58 0.36 0.45
Site 1 (mean) 0.93 0.58 0.60 0.52 0.29
Site 1(day 1) 0.94 0.68 0.39 0.37 0.12
Site 1 (day 2) 0.93 0.49 0.88 0.62 0.63
Site 1 (day 3) 0.89 0.53 0.61 0.59 0.18
Site 2 (mean) 0.86 0.42 0.56 0.48 0.28
Site 2 (day 1) 0.73 0.55 0.43 0.30 0.31
Site 2 (day 2) 0.76 0.41 0.60 0.52 0.30
Site 2 (day 3) 0.90 0.43 0.53 0.44 0.29
Site 3 (mean) 0.94 0.69 0.58 0.08 0.57
Site 3 (day 1) 0.94 0.49 0.78 0.10 0.77
Site 3 (day 2) 0.90 0.66 0.58 -0.18 0.55
Site 3 (day 3) 0.93 0.78 0.46 0.03 0.46
Depth profiles of all sites show how predicted, and observed SOC varies to the maximum
reading depth 0.9 m, as shown in Figure 4.12. High SOC (up to 3.5 – 4 %) was predicted at
sites 1 and 2 within 10 cm below the surface due to the high proportion of grassroots and debris.
But laboratory SOC measurements were done for the dry ground soil samples sieved through
the 2 mm sieve. So, relatively reasonable SOC was observed in the laboratory data.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
119
Figure 4.12. Depth profile of observed and predicted SOC from raw spectra on different days
for all three sites. For spectroscopic measurement, predicted SOC was plotted for every 2 cm.
For lab measurements, SOC of 10 cm homogenised depth samples and an additional 0-2 cm
topsoil samples were plotted against depths.
Using moist to dry EPO
An EPO transformation matrix was locally constructed from the soil VisNIR spectra from half-
cut moist and air-dried (40°C for 48 hours) soil cores transported in the laboratory. The
calibration statistics when developing predictive models on the spectral library after the
application of EPO transformation matrix were comparable to the statistics without EPO
transformation. The R2 was 0.88, and the RMSE was 0.25. The corrected RMSE for the bias
was found to be 0.25%, as shown in Table 4.6.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
120
Table 4.6. Calibration statistics from VisNIR penetrometer (with local EPO)
Spectra source (with local EPO) R2 LCCC RMSE (%) Bias (%) RMSEc (%)
Spectral library EPO transformed 0.88 0.93 0.25 0.01 0.25
In situ estimation of SOC using the penetrometer system were improved after applying the
local EPO transformation matrix compared to the statistics with no EPO as shown in Table 4.7.
Overall, the observed R2 increased to 0.86 and the RMSE decreased to 0.36%. The bias of the
validation statistics reduced by half (0.18%). The corrected RMSE for all sites and days of
insertions decreased to 0.32%. Among all sites, site 2 had the lowest mean R2 (0.92), and site
3 had highest mean RMSE (0.42%) compared to other sites.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
121
Table 4.7. Validation statistics for Penetrometer insertion (with local EPO)
Sites R2 LCCC RMSE (%) Bias (%) RMSEc (%)
Mean (all sites and days) 0.86 0.84 0.36 0.18 0.32
Site 1 (mean) 0.94 0.78 0.29 0.22 0.19
Site 1(day 1) 0.95 0.80 0.26 0.17 0.20
Site 1 (day 2) 0.93 0.77 0.30 0.20 0.23
Site 1 (day 3) 0.93 0.75 0.31 0.27 0.15
Site 2 (mean) 0.92 0.67 0.38 0.33 0.18
Site 2 (day 1) 0.84 0.71 0.31 0.23 0.21
Site 2 (day 2) 0.85 0.57 0.47 0.41 0.23
Site 2 (day 3) 0.94 0.71 0.33 0.30 0.16
Site 3 (mean) 0.96 0.81 0.42 -0.02 0.42
Site 3 (day 1) 0.95 0.71 0.55 0.02 0.55
Site 3 (day 2) 0.89 0.79 0.35 -0.08 0.34
Site 3 (day 3) 0.93 0.75 0.52 -0.12 0.50
The penetrometer system over-predicted SOC content within the 5 cm depth for site 1, due to
the high proportion of plan roots in the topsoil (Figure 4.13). Similar to the depth profiles from
without EPO, site 2 has a higher bias which reflects in the over-prediction of SOC content
thorough the whole profile. Comparatively higher OC was observed in site 3 from both
laboratory tests and penetrometer system within 0 -20 cm depth.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
122
Figure 4.13. Depth profile of observed and predicted SOC from EPO (local) transformed
VisNIR spectra on different days for all three sites. For spectroscopic measurement, predicted
SOC was plotted for every 2 cm. For lab measurements, SOC of 10 cm homogenised depth
samples and an additional 0-2 cm topsoil samples were plotted against depths.
Using penetrometer EPO
The penetrometer EPO transformation matrix was constructed from the in-situ soil VisNIR
spectra collected using the penetrometer and the scans from the air-dried soil samples (Table
4.8). There were no differences observed in the calibration statistics when developing
predictive models on the spectral library after local EPO and penetrometer EPO
transformations except the bias of the statistics. The bias is slightly lower (0.008%) for the
penetrometer EPO, but it did not improve the RMSE.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
123
Table 4.8. Calibration statistics from VisNIR penetrometer (with penetrometer EPO)
Spectra source (with
penetrometer EPO) R2 LCCC
RMSE
(%)
Bias
(%) RMSEc (%)
Spectral library EPO transformed 0.88 0.93 0.25 0.008 0.25
In situ estimation of SOC using the penetrometer system with penetrometer EPO
transformation were improved compared to those obtained using the local EPO. After removing
the effect of field soil moisture, R2 raised to 0.88, and RMSE dropped to 0.32%. Bias was also
reduced to 0.15%, so the corrected RMSE was found to be 0.28% (Table 4.9).

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
124
Table 4.9. Validation statistics for Penetrometer insertion (with penetrometer EPO)
Sites R2 LCCC RMSE (%) Bias (%) RMSEc (%)
Mean (all sites and
days) 0.88 0.87 0.32 0.15 0.28
Site 1 (mean) 0.94 0.78 0.29 0.21 0.19
Site 1(day 1) 0.94 0.78 0.29 0.18 0.23
Site 1 (day 2) 0.94 0.74 0.37 0.24 0.28
Site 1 (day 3) 0.91 0.78 0.25 0.22 0.13
Site 2 (mean) 0.92 0.70 0.33 0.27 0.19
Site 2 (day 1) 0.82 0.70 0.28 0.11 0.25
Site 2 (day 2) 0.83 0.64 0.41 0.35 0.22
Site 2 (day 3) 0.95 0.74 0.30 0.25 0.17
Site 3 (mean) 0.95 0.84 0.35 -0.02 0.35
Site 3 (day 1) 0.95 0.66 0.61 -0.06 0.61
Site 3 (day 2) 0.90 0.79 0.35 -0.13 0.32
Site 3 (day 3) 0.95 0.87 0.25 -0.02 0.25
The depth profile of observed and predicted SOC from the VisNIR penetrometer insertion for
all the sites is shown in Figure 4.14. For site 1, high SOC was found within 0 – 10 cm from the
prediction from VisNIR penetrometer scans. For site 2, higher SOC was predicted from 20 –
90 cm from the NIR scans compared to laboratory measurements.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
125
Figure 4.14. Depth profile of observed and predicted SOC from EPO (penetrometer)
transformed VisNIR spectra on different days for all three sites. For spectroscopic
measurement, predicted SOC was plotted for every 2 cm. For lab measurements, SOC of 10
cm homogenised depth samples and an additional 0-2 cm topsoil samples were plotted against
depths.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
126
Figure 4.15. Residuals of estimated soil organic carbon (SOC) content for different wetness of
the soil
OC residuals plotted against soil wetness across the three sampling days demonstrate that
prediction obtained using the penetrometer system has a slight bias (0.15%). However, SOC
residuals were not correlated with soil wetness (Figure 4.15). Most of the residuals are within
0 to -0.5 %, which indicates the VisNIR penetrometer, to some extent overestimating SOC.
Overall, the predicted SOC content from the penetrometer system shows a high correlation
with the SOC content measure in the laboratory using the Walkley-Black method. The
penetrometer EPO transformation matrix was able to remove the effect of the soil moisture
from the VisNIR spectra to predict SOC content precisely. Penetrometer EPO performed better
compared to the local EPO from moist cores as VisNIR spectra collected from the insertion of
the penetrometer compress soil and the effect of soil moisture. The results suggest that we do

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
127
not require to collect additional information on soil moisture and models calibrated using
VisNIR spectra from air-dried and ground soils can be applied to in-situ data. Due to the
excessive amount of plant roots, penetrometer system predicts high SOC content compared to
SOC content measured in the laboratory within the 0 -10 cm depth.
4.4.4 Estimation of SOC stock from VisNIR penetrometer system
SOC stocks for every 10 cm depth were calculated at the three different sites using the
estimated SOC from VisNIR penetrometer system and the laboratory measurements from
homogenised samples of all three days using equation 1. Figure 4.16 shows that estimated SOC
stocks measured using VisNIR penetrometer system are higher than the actual SOC stocks
from laboratory measurements using Walkley-Black method. Only estimated SOC stocks for
the top 20 cm of site 3 were lower than the actual SOC stocks. Standard deviations of between
the estimated and actual were calculated for all three sites. Standard deviation seems to
decrease with depth except for site 3 and varies from 0.31 t ha-1 to 4.59 t ha-1 within all sites.
The average standard deviation is highest in site 3 (2.52 t ha-1) and lowest in site 1 (1.31 t ha-
1).

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
128
Figure 4.16. Comparisons of predicted SOC stocks from the penetrometer and actual SOC
stocks from laboratory measurements. Dotted black line and the blue line indicate the 1:1 line
and the actual trend in the model, respectively.
4.5. Conclusions
In this study, a VisNIR penetrometer system was successfully used to estimate SOC from
spectra collected in situ. The external soil spectral library constructed from different locations
around NSW, Australia, was successfully used for calibration purposes, and the EPO
transformation matrices were used to correct for the spectral difference between the in-situ and
dry spectra acquired by the VisNIR penetrometer system. SOC was predicted from four
different conditions (air- dry core, ground composite samples, field moist core, and field
conditions using penetrometer insertion). Predicted SOC was then validated from 33 samples
collected from three different sites, and SOC was measured in the laboratory using the
Walkley-Black method (Walkley and Black, 1934). Good R2 and RMSE (0.88 and 0.32%,
respectively) were found between the observed SOC and predicted SOC from VisNIR

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
129
penetrometer insertions at three different locations after the correction using the penetrometer
EPO transformation matrix. VisNIR penetrometer system seems to overpredict SOC stocks
compared to the laboratory measurements. To test the effectiveness of this penetrometer
system, different locations with various mineralogy and textures of soils need to be analysed
in the future. This technique substitutes the conventional methods for measuring SOC content
where soil cores are extracted and transported to the laboratory for analysis. This system can
be potentially used to record the high-resolution vertical distribution of SOC to characterise its
profile rapidly and cost-effectively compared to the conventional methods that would benefit
the soil science and agriculture communities.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
130
4.6 References
Abdul Munnaf, M., Nawar, S. & Mouazen, A. M. 2019. Estimation of Secondary Soil
Properties by Fusion of Laboratory and On-Line Measured Vis–NIR Spectra. Remote
Sensing 11(23): 2819.
Ackerson, J. P., Demattê, J. A. M. & Morgan, C. L. S. 2015. Predicting clay content on field-
moist intact tropical soils using a dried, ground VisNIR library with external
parameter orthogonalization. Geoderma 259: 196–204.
Ackerson, J. P., Morgan, C. L. S. & Ge, Y. 2017. Penetrometer-mounted VisNIR spectroscopy:
Application of EPO-PLS to in situ VisNIR spectra. Geoderma 286: 131–138.
Angelopoulou, T., Balafoutis, A., Zalidis, G. & Bochtis, D. 2020. From Laboratory to Proximal
Sensing Spectroscopy for Soil Organic Carbon Estimation—A Review. Sustainability
12(2): 443.
Behrens, T. & Scholten, T. 2006. Digital soil mapping in Germany—a review. Journal of Plant
Nutrition and Soil Science 169(3): 434–443.
Ben-Dor, E., Heller, D. & Chudnovsky, A. 2008. A novel method of classifying soil profiles
in the field using optical means. Soil Science Society of America Journal 72(4): 1113–
1123.
Bricklemyer, R. S. & Brown, D. J. 2010. On-the-go VisNIR: Potential and limitations for
mapping soil clay and organic carbon. Computers and Electronics in Agriculture
70(1): 209–216.
Brown, S. E., Miller, D. C., Ordonez, P. J. & Baylis, K. 2018. Evidence for the impacts of
agroforestry on agricultural productivity, ecosystem services, and human well-being
in high-income countries: a systematic map protocol. Environmental Evidence 7(1):

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
131
24.
Camera, C., Zomeni, Z., Noller, J. S., Zissimos, A. M., Christoforou, I. C. & Bruggeman, A.
2017. A high resolution map of soil types and physical properties for Cyprus: A digital
soil mapping optimization. Geoderma 285: 35–49.
Carter, M. R. 2004. Researching structural complexity in agricultural soils. Elsevier.
Chan, K. M. A., Anderson, E., Chapman, M., Jespersen, K. & Olmsted, P. 2017. Payments for
ecosystem services: Rife with problems and potential—for transformation towards
sustainability. Ecological Economics 140: 110–122.
Chang, C.-W., Laird, D. A. & Hurburgh Jr, C. R. 2005. Influence of soil moisture on near-
infrared reflectance spectroscopic measurement of soil properties. Soil Science
170(4): 244–255.
Chang, C.-W., Laird, D. A., Mausbach, M. J. & Hurburgh, C. R. 2001. Near‐infrared
reflectance spectroscopy–principal components regression analyses of soil properties.
Soil Science Society of America Journal 65(2): 480–490.
Christy, C. D. 2008. Real-time measurement of soil attributes using on-the-go near infrared
reflectance spectroscopy. Computers and electronics in agriculture 61(1): 10–19.
de Gruijter, J J, Wheeler, I. & Malone, B. P. 2019. Using model predictions of soil carbon in
farm-scale auditing-A software tool. Agricultural Systems 169: 24–30.
de Gruijter, Jaap J, McBratney, A. B., Minasny, B., Wheeler, I., Malone, B. P. & Stockmann,
U. 2018. Farm-scale soil carbon auditing. Pedometrics, hlm. 693–720. Springer.
Fornara, D. A., Steinbeiss, S., McNamara, N. P., Gleixner, G., Oakley, S., Poulton, P. R.,
Macdonald, A. J., et al. 2011. Increases in soil organic carbon sequestration can reduce
the global warming potential of long‐term liming to permanent grassland. Global

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
132
Change Biology 17(5): 1925–1934.
Ge, Y., Morgan, C. L. S. & Ackerson, J. P. 2014. VisNIR spectra of dried ground soils predict
properties of soils scanned moist and intact. Geoderma 221: 61–69.
Gerrand, A., Keenan, R. J., Kanowski, P. & Stanton, R. 2003. Australian forest plantations: an
overview of industry, environmental and community issues and benefits. Australian
Forestry 66(1): 1–8.
Guo, L., Zhang, H., Shi, T., Chen, Y., Jiang, Q. & Linderman, M. 2019. Prediction of soil
organic carbon stock by laboratory spectral data and airborne hyperspectral images.
Geoderma 337: 32–41.
Heal, G. M. & Small, A. A. 2002. Agriculture and ecosystem services. Handbook of
agricultural economics 2: 1341.
Hutengs, C., Seidel, M., Oertel, F., Ludwig, B. & Vohland, M. 2019. In situ and laboratory soil
spectroscopy with portable visible-to-near-infrared and mid-infrared instruments for
the assessment of organic carbon in soils. Geoderma 355: 113900.
Irving, L. J. 2015. Carbon assimilation, biomass partitioning and productivity in grasses.
Agriculture 5(4): 1116–1134.
Jia, X., Chen, S., Yang, Y., Zhou, L., Yu, W. & Shi, Z. 2017. Organic carbon prediction in soil
cores using VNIR and MIR techniques in an alpine landscape. Scientific Reports 7(1):
1–9.
Killham, K. & Staddon, W. J. 2002. Bioindicators and sensors of soil health and the application
of geostatistics. Enzymes in the environment. Marcel Dekkerr, NY, USA 391–405.
Kodaira, M. & Shibusawa, S. 2013. Using a mobile real-time soil visible-near infrared sensor
for high resolution soil property mapping. Geoderma 199: 64–79.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
133
Körschens, M. 2002. Importance of soil organic matter (SOM) for biomass production and
environment (a review). Archives of Agronomy and Soil Science 48(2): 89–94.
Kuhn, M., Weston, S., Keefer, C. & Kuhn, M. M. 2020. Package ‘Cubist.’
Kusumo, B. H., Hedley, C. B., Hedley, M. J., Hueni, A., Tuohy, M. P. & Arnold, G. C. 2008.
The use of diffuse reflectance spectroscopy for in situ carbon and nitrogen analysis of
pastoral soils. Soil Research 46(7): 623–635.
Lescure, T., Moreau, J., Charles, C., Saanda, T. B. A., Thouin, H., Pillas, N., Bauda, P., et al.
2016. Influence of organic matters on AsIII oxidation by the microflora of polluted
soils. Environmental geochemistry and health 38(3): 911–925.
Liu, J., Williams, J. R., Zehnder, A. J. B. & Yang, H. 2007. GEPIC–modelling wheat yield and
crop water productivity with high resolution on a global scale. Agricultural systems
94(2): 478–493.
Liu, S., Shen, H., Chen, S., Zhao, X., Biswas, A., Jia, X., Shi, Z., et al. 2019. Estimating forest
soil organic carbon content using vis-NIR spectroscopy: Implications for large-scale
soil carbon spectroscopic assessment. Geoderma 348: 37–44.
Liu, Y., Deng, C., Lu, Y., Shen, Q., Zhao, H., Tao, Y. and Pan, X., 2020. Evaluating the
characteristics of soil vis-NIR spectra after the removal of moisture effect using
external parameter orthogonalization. Geoderma, 376, p.114568.
McBratney, A. B., Santos, M. L. M. & Minasny, B. 2003. On digital soil mapping. Geoderma
117(1–2): 3–52.
Metcalfe, D. J. & Bui, E. N. 2017. Australia state of the environment 2016: land, independent
report to the Australian Government minister for the environment and energy.
Australian Government Department of the Environment and Energy, Canberra, doi
10: 94.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
134
Minasny, B., McBratney, A. B., Bellon-Maurel, V., Roger, J.-M., Gobrecht, A., Ferrand, L. &
Joalland, S. 2011. Removing the effect of soil moisture from NIR diffuse reflectance
spectra for the prediction of soil organic carbon. Geoderma 167: 118–124.
Morellos, A., Pantazi, X.-E., Moshou, D., Alexandridis, T., Whetton, R., Tziotzios, G.,
Wiebensohn, J., et al. 2016. Machine learning based prediction of soil total nitrogen,
organic carbon and moisture content by using VIS-NIR spectroscopy. Biosystems
Engineering 152: 104–116.
Morgan, C. L. S., Waiser, T. H., Brown, D. J. & Hallmark, C. T. 2009. Simulated in situ
characterization of soil organic and inorganic carbon with visible near-infrared diffuse
reflectance spectroscopy. Geoderma 151(3–4): 249–256.
Mouazen, A M, Maleki, M. R., De Baerdemaeker, J. & Ramon, H. 2007. On-line measurement
of some selected soil properties using a VIS–NIR sensor. Soil and Tillage Research
93(1): 13–27.
Mouazen, Abdul Mounem, De Baerdemaeker, J. & Ramon, H. 2005. Towards development of
on-line soil moisture content sensor using a fibre-type NIR spectrophotometer. Soil
and Tillage Research 80(1–2): 171–183.
Moura-Bueno, J. M., Dalmolin, R. S. D., ten Caten, A., Dotto, A. C. & Demattê, J. A. M. 2019.
Stratification of a local VIS-NIR-SWIR spectral library by homogeneity criteria yields
more accurate soil organic carbon predictions. Geoderma 337: 565–581.
Mubarak, I., Mailhol, J. C., Angulo-Jaramillo, R., Ruelle, P., Boivin, P. & Khaledian, M. 2009.
Temporal variability in soil hydraulic properties under drip irrigation. Geoderma
150(1–2): 158–165.
Nawar, S. & Mouazen, A. M. 2019. On-line vis-NIR spectroscopy prediction of soil organic
carbon using machine learning. Soil and Tillage Research 190: 120–127.

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
135
Nelson, G. C. 2009. Agriculture and climate change: An agenda for negotiation in Copenhagen,
hlm. Vol. 16. Intl Food Policy Res Inst.
Nocita, M., Stevens, A., Toth, G., Panagos, P., van Wesemael, B. & Montanarella, L. 2014.
Prediction of soil organic carbon content by diffuse reflectance spectroscopy using a
local partial least square regression approach. Soil Biology and Biochemistry 68: 337–
347.
Ogrič, M., Knadel, M., Kristiansen, S. M., Peng, Y., De Jonge, L. W., Adhikari, K. & Greve,
M. H. 2019. Soil organic carbon predictions in Subarctic Greenland by visible–near
infrared spectroscopy. Arctic, Antarctic, and Alpine Research 51(1): 490–505.
Ovalles, F. A. & Collins, M. E. 1986. Soil‐landscape relationships and soil variability in north
central Florida. Soil Science Society of America Journal 50(2): 401–408.
Pei, X., Sudduth, K. A., Veum, K. S. & Li, M. 2019. Improving In-Situ Estimation of Soil
Profile Properties Using a Multi-Sensor Probe. Sensors 19(5): 1011.
Power, A. G. 2010. Ecosystem services and agriculture: tradeoffs and synergies. Philosophical
transactions of the royal society B: biological sciences 365(1554): 2959–2971.
Roger, J.-M., Chauchard, F. & Bellon-Maurel, V. 2003. EPO–PLS external parameter
orthogonalisation of PLS application to temperature-independent measurement of
sugar content of intact fruits. Chemometrics and Intelligent Laboratory Systems 66(2):
191–204.
Rossel, R. A. V., Cattle, S. R., Ortega, A. & Fouad, Y. 2009. In situ measurements of soil
colour, mineral composition and clay content by vis–NIR spectroscopy. Geoderma
150(3–4): 253–266.
Rossel, R. A. V., Walvoort, D. J. J., McBratney, A. B., Janik, L. J. & Skjemstad, J. O. 2006.
Visible, near infrared, mid infrared or combined diffuse reflectance spectroscopy for

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
136
simultaneous assessment of various soil properties. Geoderma 131(1–2): 59–75.
Roudier, P., Hedley, C. B., Lobsey, C. R., Rossel, R. A. V. & Leroux, C. 2017. Evaluation of
two methods to eliminate the effect of water from soil vis–NIR spectra for predictions
of organic carbon. Geoderma 296: 98–107.
Scherbov, S., Lutz, W. & Sanderson, W. C. 2011. The uncertain timing of reaching 8 billion,
peak world population, and other demographic milestones. Population and
Development Review 37(3): 571–578.
Semenov, M. A. 2004. Using weather generators in crop modelling. VII International
Symposium on Modelling in Fruit Research and Orchard Management 707, hlm. 93–
100.
S Veum, K., A Parker, P., A Sudduth, K. and H Holan, S., 2018. Predicting profile soil
properties with reflectance spectra via Bayesian covariate-assisted external parameter
orthogonalization. Sensors, 18(11), p.3869.
Smith, P., Cotrufo, M. F., Rumpel, C., Paustian, K., Kuikman, P. J., Elliott, J. A., McDowell,
R., et al. 2015. Biogeochemical cycles and biodiversity as key drivers of ecosystem
services provided by soils. Soil Discussions 2(1): 537–586.
Smith, P., Soussana, J., Angers, D., Schipper, L., Chenu, C., Rasse, D. P., Batjes, N. H., et al.
2020. How to measure, report and verify soil carbon change to realize the potential of
soil carbon sequestration for atmospheric greenhouse gas removal. Global Change
Biology 26(1): 219–241.
Stevens, A., Nocita, M., Tóth, G., Montanarella, L. & van Wesemael, B. 2013. Prediction of
soil organic carbon at the European scale by visible and near infrared reflectance
spectroscopy. PloS one 8(6): e66409.
Stockmann, U., Padarian, J., McBratney, A., Minasny, B., de Brogniez, D., Montanarella, L.,

Chapter 4: VisNIR Penetrometer System for Predicting Soil Carbon
137
Hong, S. Y., et al. 2015. Global soil organic carbon assessment. Global Food Security
6: 9–16.
Viscarra Rossel, R., McBratney, A. & Minasny, B. 2010. Proximal soil sensing.
Waiser, T. H., Morgan, C. L. S., Brown, D. J. & Hallmark, C. T. 2007. In situ characterization
of soil clay content with visible near‐infrared diffuse reflectance spectroscopy. Soil
Science Society of America Journal 71(2): 389–396.
Webster, R. 1971. Wilks’s Criterion: a measure for comparing the value of general purpose
soil classifications. Journal of Soil Science 22(2): 254–260.
Wijewardane, N.K., Ge, Y. and Morgan, C.L., 2016. Moisture insensitive prediction of soil
properties from VNIR reflectance spectra based on external parameter
orthogonalization. Geoderma, 267, pp.92-101.
Wijewardane, N. K., Hetrick, S., Ackerson, J., Morgan, C. L. S. & Ge, Y. 2020. VisNIR
integrated multi-sensing penetrometer for in situ high-resolution vertical soil sensing.
Soil and Tillage Research 199: 104604.
Zhao, Y., Potgieter, A. B., Zhang, M., Wu, B. & Hammer, G. L. 2020. Predicting wheat yield
at the field scale by combining high-resolution Sentinel-2 satellite imagery and crop
modelling. Remote Sensing 12(6): 1024.

138
CHAPTER 5
AUTOMATED SOIL PARTICLE SIZE ANALYSIS USING
TIME OF FLIGHT DISTANCE RANGING SENSOR
This chapter is published as:
Murad, M. O. F., Jones, E. J., & Minasny, B. Automated soil particle size analysis using time
of flight distance ranging sensor. Soil Science Society of America Journal.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
139
5.1 Summary
Particle size distribution influences various physical, chemical, and biological properties of
soil. The hydrometer test is the most commonly used method for soil particle size analysis
because of its inexpensive instrumental set up and simple use. But manual observations are
required to obtain high-resolution particle size distributions. X-ray, γ-ray attenuation and laser
diffraction techniques can measure particle size distribution automatically and faster than the
sedimentation methods. However, these techniques have very high equipment costs. The
objective of this study is to develop an automated method for measuring a wide range of soil
particle-size distribution based on the hydrometer method. Adafruit VL6180X Time of Flight
(ToF) distance Ranging Sensor was used to measure the distance between the sensor and the
tip of the hydrometer over an eight-hour time interval as particles settled. An initial distance
between the sensor and tip of the hydrometer was recorded and used to convert the distance
with time to particle size and concentration. The temperature of the suspension was measured
at the same time using a waterproof DS18B20 1-Wire digital temperature sensor. The Arduino
Uno R3 was used to program the ToF sensor to record both the distance and the temperature at
5-second intervals. The recording of the distance with time and solution temperature was
converted to particle diameter and concentration based on Stokes’ law. The whole particle size
distribution, from 40 μm to 2 μm, was obtained automatically within eight hours. A total of 10
soil samples with different soil texture were used to test the
system. The measurement from the automated system was checked against the standard pipette
method. Results show that measurement of the percentages finer than 2, 5, 10, 20, and 40 μm
obtained by the two methods are highly correlated, with R2 values between 0.857 to 0.896. The
hardware to automate the system costs less than $70 (USD) and provides an easy, efficient, and
cost-effective way of measuring soil particle size distribution.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
140
5.2 Introduction
The particle size distribution of soil, commonly represented as a percent mass at defined ranges
of particle size, is a fundamental property of soil. The particle size distribution affects soil
physical properties such as water retention, hydraulic conductivity, leaching and erosion
potential, as well as plant nutrient storage and organic matter dynamics, including carbon-
sequestration potential (Kettler et al., 2001). Soil particle size distribution is a key parameter
used for evaluating the quality of soil in terms of agricultural management practices (Kettler et
al., 2001).
A major difficulty when comparing or sharing soil textural information internationally is
different equivalent diameters used to define the silt-sand threshold. The silt-sized fraction is
defined as particles with an equivalent diameter of 2-50 μm by the USDA/FAO system, but
Australia, Belgium, France, Italy, Netherlands, etc. adopted the International system where the
particles of 2-20 μm are considered as silt-sized. Other systems have also utilized 2-60 μm or
2-63 μm. This leads to difficulties in comparing soil textural classes and also incompatibilities
for PTFs generated under one texture classification system to be applied to data measured in
another system. Several models have been proposed to convert measurements between silt and
sand fraction boundary from 20 to 50 μm via PTF (Marshall, 1947; Shirazi et al., 1988; Buchan,
1989; Rousseva, 1997; Minasny and McBratney, 2001; Padarian et al., 2012). Even though we
can use these functions to relate the fractions in one system to the fractions in the other, it
would be more accurate to measure both values directly. Also, because of the different range
of particle size used in the different texture classification system, it would be advantageous to
measure a full particle-size distribution, rather than percentages of sand, silt, and clay (Nemes
et al., 1999). Thus, the ability to measure a complete particle distribution will circumvent the
need to convert from one system to the other. A continuous particle size distribution also
provides richer information of essential soil properties such and pore space distribution, water

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
141
retention capacity, hydraulic conductivity, absorption and thermal properties of soil (Shiozawa
and Campbell, 1991; Hajnos et al., 2006; Slawinski et al., 2006; Ryżak and Bieganowski, 2011;
Yang et al., 2019).
Table 5.1 summarizes the comparisons of commonly used techniques for particle size analysis
of soil. The hydrometer and pipette methods are commonly used methods based on
sedimentation of soil particles through a fluid under a constant gravitational field. The
hydrometer methods rely on measuring the density of the soil particle suspension at a specific
depth and time. In contrast, the pipette method measures the concentration of soil suspension
at a specific depth and time. These methods are well-established for soil particle size analysis
(Loveland et al., 2000; Gee and Or, 2002; Kroetsch and Wang, 2008; ISO 11277, 2009),
although the results obtained from these methods sometimes slightly vary from each other
(Miller, Radcliffe, and Miller, 1988; ISO 11277, 2009). The two methods also have some
unavoidable disadvantages. These methods are time-consuming and require a relatively large
amount of soil sample compared to laser diffraction and Sedigraph methods. Moreover, soil
particles having a size of less than 1 μm cannot be measured precisely because of Brownian
motion on the sedimentation rate (Ferro and Mirabile, 2009). The results obtained from these
methods depend on the expertise of the operators (Coates & Hulse, 1985). Moreover, the
pipette method requires manual sampling of the soil suspension, and the hydrometer method
requires manual data reading for different soil particle sizes. Therefore, it is time-consuming
to obtain detailed continuous particle size distributions from these methods (Naime et al.,
2001). Moreover, hydrometer or pipette methods require manual readings for each particle size
threshold, often leading to a low-resolution PSD. On the other hand, more precise techniques
such as the laser diffraction analysis and sedigraph technique require specialized equipment
which involves a high initial cost.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
142
Table 5.1. Summary of comparisons of different methods of soil particle size analysis (data
derived from: Coates & Hulse, 1985; Beuselinck et al., 1998; Jacob et al., 2002; Arriaga et al.,
Prop
ertie
s
X-r
ayA
tten
uatio
n (S
edig
raph
) m
etho
d
γ-ra
y A
tten
uatio
n
met
hod
Die
lect
ric
met
hod
Las
er
diff
ract
ion
met
hod
Pipe
tte
met
hod
Hyd
rom
eter
m
etho
d
Prop
osed
A
utom
ated
hy
drom
eter
m
etho
d
Cos
t Ex
pens
ive
(~U
S $3
0 00
0)
Expe
nsiv
e (~
US
$30
000)
R
esea
rch
base
d m
etho
d Ex
pens
ive
(~U
S $6
0 00
0)
Low
cos
t, ba
sic
equi
pmen
t (~
US
$500
- $8
00)
Low
cos
t, ba
sic
equi
pmen
t (~
US
$800
- $1
000)
Low
cos
t, ba
sic
equi
pmen
t and
th
e A
rdui
no
with
Te
mpe
ratu
re
and
ToF
sens
or
(~U
S $9
00 -
$110
0)
Tim
e of
an
alys
is
15 m
in o
r les
s 28
min
utes
27
min
utes
20
-30
seco
nds
8 ho
urs
8 ho
urs
8 ho
urs
Part
icle
size
ra
nge
0.1-
300
µm
2-15
0 µm
2-50
µm
0.01
-350
0µm
2-
50 µ
m2-
50 µ
m2-
50 µ
m
Ope
ratio
n A
utom
atic
A
utom
atic
A
utom
atic
A
utom
atic
M
anua
l/ op
erat
or-
depe
nden
t
Man
ual/
oper
ator
-de
pend
ent
Aut
omat
ic
Met
hod
Sedi
men
tatio
n Se
dim
enta
tion
Sedi
men
tatio
n La
ser
diff
ract
omet
ry
Sedi
men
tatio
n Se
dim
enta
tion
Sedi
men
tatio
n
Req
uire
d Sa
mpl
e si
ze
2 g
5x5x
25cm
1–
2 g
1–2
g 30
-100
g30
-100
g30
-100
g
Abi
lity
to
gene
rate
co
ntin
uous
pa
rtic
le-s
ize
dist
ribu
tion
au
tom
atic
ally
Yes
Y
es
Yes
Y
es
No
No
Yes
Rep
rodu
cibi
lity
of r
esul
ts
(Mea
n σ)
2.
41%
-
-1.
78 %
0.
72%
1.
08%
1.
64%

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
143
2006).
There have been many attempts to automate the gravitational sedimentation procedure for soil
particle analysis, as summarized in Table 5.1. Zhang and Tumay suggested a method based on
the relation between the specific weight of soil and solution pressure measured in two depths
and calculated by linear analysis of the pressure difference between two points (Zhang &
Tumay, 1995). By analyzing the force exerted by floating soil particles in the suspension,
Nemes proposed an automated hydrometer method (Nemes et al., 2002). In 2004, Kovacs used
another liquid of known density to determine the soil density using an electronic measurement
and test control system (Kovács et al., 2004). High-resolution measurements used in this
method allows for finer measurements of particle size distribution. Another method based on
the integral suspension pressure was introduced to take into account all the soil particles above
a certain measuring depth (Durner et al., 2017). This technique can determine particle size
distribution with very small variance and absolute error in the clay and silt fractions but require
a specialized system for measuring suspension pressure. Larger sampling zone compared to
pipette and hydrometer test makes this technique more reliable than other techniques (Durner
et al., 2017).
X-ray attenuation (sedigraph), γ-ray attenuation, dielectric, and laser diffraction methods are
rapid, repeatable and less operator-dependent than hydrometer and pipette methods. The major
advantage of these methods is that these provide continuous particle size distribution over a
large range of particle diameters, but they are also expensive, as shown in Table 5.1. The
hydrometer test is the most commonly used sedimentation method for soil particle analysis
because of its inexpensive instrumental set up and simple use. While it is possible to take
continuous manual readings during the settling time to provide more points on the particle size
distribution, it would be very labour-intensive. For these reasons, it becomes essential to

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
144
automate the hydrometer testing procedure to obtain an accurate, less laborious and cost-
effective continuous particle size distribution.
The objective of this study was to develop an automated, cheap, and simple method for
evaluating soil particle-size distribution. This method will provide a continuous particle size
distribution curve of soil particles with the continuous measurement of suspension temperature.
Suspension temperature will allow us to calculate the viscosity more precisely and improve the
soil particle size assessments.
5.3 Material and Methods
5.3.1 Basic Principles of Gravitational Sedimentation
The terminal velocity of particles settling in a fluid under a constant gravitational field is
defined by Stokes’ law,
𝑣𝑣 = 𝑔𝑔(𝜌𝜌𝑠𝑠−𝜌𝜌𝑓𝑓)18𝜂𝜂
𝐵𝐵2 (5.1)
where,
𝑣𝑣 = terminal sedimentation velocity (cm s-1)
𝑔𝑔 = acceleration due to gravity (cm s-2)
𝜌𝜌𝑠𝑠 = sediment density (g cm-3)
𝜌𝜌𝑠𝑠 = fluid density (g cm-3)
𝜂𝜂 = viscosity (g cm-1 s)
𝐵𝐵 = particle diameter (cm)
In this procedure, soil particles were chemically and physically dispersed over 48 hours and
then transferred in a measuring cylinder. Stirring or shaking of the cylinder is performed to
fully distribute suspended particles are allowed to settle under the force of gravity. The

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
145
gravitational sedimentation methods are based on Stokes’ law (Stokes, 1851) with the
following assumptions:
• Particles are settling in laminar flow
• The particles are perfect spheres
• Particle surfaces are smooth
• Particles do not interfere with each other during sedimentation
• The terminal velocities of the particles are reached immediately
• Despite different particle sizes, particle density, is constant (commonly given as 2.65 g
cm-3, i.e., the density of quartz)
It was demonstrated that soil particles almost immediately reach terminal velocity (Gee and
Or, 2002), but the rest of the assumptions are not always true.
With the rising temperature, the atomic distance of particles in the fluid increases. So, it causes
the expansion of the fluid and its volume increases. As particle volume has an inversely
proportional relationship with density, fluid density will decrease with the increasing
temperature. Also, with the increment of atomic distances, the attraction forces between the
atoms decreases which allows it to flow past each other. Thus, with a higher temperature, the
viscosity of fluid increases. As the change of temperature can affect the measurement of
particle size diameter, the proposed method measured and recorded suspension temperature
using a waterproof DS18B20 1-Wire digital temperature sensor. These temperatures were
considered during the calculation of the particle diameters.
5.3.2 Instrumental Setup

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
146
This study utilized the established hydrometer method but automated the reading of specific
gravity by measuring hydrometer displacement over time with a ToF sensor. The Adafruit
VL6180X ToF Distance Ranging Sensor was used to measure the distance between the sensor
and the tip of the hydrometer. A waterproof DS18B20 1-Wire digital temperature sensor was
used to record the temperature. Arduino Uno R3 microcontroller was used to program and
control both sensors and record the measurements at 5-second intervals for 8 hours (Figure
5.1). The measurements can be analyzed instantly after the test on the computer attached to the
Arduino. Also, the data can be saved in an SD card and analyzed later.
(a) (b)
Figure 5.1 (a) Schematic diagram; and (b) Actual setup of Adafruit VL6180X ToF and
DS18B20 temperature sensor coupled with Arduino Uno R3 that includes a liquid-crystal
display to track the progress of the measurements.
5.3.3 Principle of ToF Distance Sensor
The Adafruit VL6180X ToF distance sensor is a compact module that contains a laser emitter
and single photon avalanche diode light receiver to measure the time required by the laser light
to bounce back to the sensor. This type of sensor uses a very narrow light source that can
Digital Temperature Sensor
Time of Flight (ToF) distance
Sensor
Arduino Uno R3

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
147
measure the distance of the object directly in front of it. Adafruit VL6180X can be used with
any 3-5 V power or logic microcontroller and measure distances between 20 to 200 mm (Figure
5.2).
Figure 5.2. Adafruit VL6180X ToF Distance sensor
Generally, distance or proximity sensors use IR (Infra-Red) technology that measures the
strength of the signal. But the strength of a signal can be easily affected by the reflectance
coefficient of the surface. Also, this type of sensor has linearity or 'double imaging' problems
where it cannot differentiate whether an object is too close or too far. To overcome this issue,
ToF Distance sensor was introduced to measure the time required for emitted photons to be
reflected in the source (Figure 5.3). The distance of an object can be accurately measured
without being affected by the surface characteristics using ToF distance sensors. The main
advantages of the ToF sensors are precise and fast distance measurement in an energy-efficient
and cost-effective way.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
148
Figure 5.3. Working mechanism of ToF distance sensor
5.3.4 Stability Check of Vl6180x ToF Sensor
To ensure there is enough reflectance of the laser to bounce back to the source, a white
Styrofoam cap was used at the top of the hydrometer (Figure 5.4a). To confirm the accuracy
of the ToF sensor, a stability experiment was performed with the Adafruit VL6180X Time of
Flight Distance (ToF) sensor. In this experiment, a styrofoam block was placed at a distance of
10 cm for 24 hours in a temperature-controlled laboratory (Figure 5.4b). Approximately ±2
mm drift in the distance was found in this period, which was quite satisfactory at this stage of
the study. The distance was converted to hydrometer reading, where 1 mm is equal to 0.6 unit
of the hydrometer reading (g L-1).

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
149
(a) (b)
Figure 5.4 (a) Hydrometer with styrofoam cap; and (b) Stability check of Adafruit VL6180X
Time of Flight Distance (ToF) sensor
5.3.5 Experimental Procedure
Ten soil samples that were collected from across New South Wales, Australia, with a range of
texture were used to test the automated method. The characteristics of the soil samples are
described in Table 5.2. The soil samples were passed through a mechanical crusher with
apertures of 2 mm to obtain the soil sample <2 mm. Since all soil samples had a small amount
of organic matter (<1%), oxidization of organic matter was not performed. Then, 100 g for
sandy and 30 g for clayey samples was transferred to a 600 mL bottle to which 50 ml of sodium
hexametaphosphate [HMP, (NaP03)] and 500 mL of deionized water were added. Samples
were then placed in a rotating wheel for 48 hours of end-over-end shaking. After the agitation,
the soil solution was transferred to a 1000 mL measuring cylinder before adding deionized
water up to 1000 mL. Then the suspension was agitated using a stirrer to distribute soil particles
throughout the solution, and the time recording was started. After that, the Adafruit VL6180X
Time of Flight Distance (ToF) and DS18B20 1-Wire digital temperature sensor was set up at
the top of the cylinder, as shown in (Figure 5.5). A small tube of a diameter larger than the
styrofoam cap was added on the top of the suspension cylinder to inhibit movement of the
hydrometer outside of the reading zone of the ToF sensor. The ToF sensor was placed at the
top of the tube to maintain a constant distance above the surface of the suspension. The initial
distance between the ToF sensor and the styrofoam cap on top of the hydrometer, and the
hydrometer reading were recorded and adjusted for a time delay due to the setup of the
instrument. Temperature and distance data were recorded every 5 seconds for 8 hours, and the
data were stored in an SD card. Then the distance between the ToF sensor and the tip of the
hydrometer was converted to the hydrometer reading (R). Two trials were conducted with the

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
150
same soil samples to assess the repeatability of the proposed method. The second trial of
automated hydrometer test was performed 24 hours after the first trial.
Table 5.2. Characteristics of soil samples used for testing the automated hydrometer method
Site Soil type Clay Silt Fine Sand
Coarse Sand
Texture class
(< 2 µm) (2-20 µm) (20-200 µm)
(200-2000 µm)
%
Westwood 1 Kurosol 24.5 14.3 15.6 45.6 Clay Loam
Westwood 2 Kurosol 28.8 17.9 19.1 34.2 Clay Loam
Narrabri 2 Sodosol 33.4 15.3 12.6 38.7 Clay Loam
Nowley 1 Dermosol 43.8 9.8 11.2 35.2 Clay
Narrabri 1 Sodosol 53.6 13 13.6 19.8 Clay
Nowley 2 Dermosol 57.5 19.7 4.3 18.5 Clay
Landsdowne 1
Kurosol 62.1 5.4 5.3 27.2
Clay
Rawson Dermosol 64.9 15 3.1 17.1 Clay
Landsdowne 2
Dermosol 65.3 13.3 3.3 18.1 Clay
Nowley 3 Vertosol 73.8 7.5 5.1 13.6 Clay

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
151
Figure 5.5. The setup of automated hydrometer including Adafruit VL6180X (ToF) and
DS18B20 temperature sensor with a hydrometer and measuring cylinder.
For determining the percentage finer of soil particles from the automated hydrometer test, the
following equations were applied,
Percent mass finer = (𝐴𝐴 ∗ 𝐶𝐶𝐶𝐶𝐶𝐶 ∗ 100) / 𝑊𝑊𝑠𝑠 (5.2)
where,
𝐴𝐴 = correction for specific gravity (as hydrometer is calibrated for 𝐺𝐺𝑠𝑠 = 2.65)
= 1.65 * 𝐺𝐺𝑠𝑠 / ((𝐺𝐺𝑠𝑠 – 1) * 2.65)
𝐶𝐶𝐶𝐶𝐶𝐶 = corrected hydrometer reading
= 𝐶𝐶 + 𝐹𝐹𝑡𝑡 + 𝐹𝐹𝑧𝑧
𝐶𝐶 = Hydrometer reading
𝐹𝐹𝑡𝑡 = temperature correction
For 152H hydrometers,
𝐹𝐹𝑡𝑡 = −12.35952257 + T ∗ (1.51062059 + T ∗ (−0.06923056 + T ∗ 0.00122483))
For 151H hydrometers,

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
152
𝐹𝐹𝑡𝑡= −7.6338851 + T ∗ (0.93361976 + T ∗ (−0.04284159 + T ∗ 0.000758977))
where,
T = fluid temperature, in degrees Celsius
𝐹𝐹𝑧𝑧 = zero Correction
𝑊𝑊𝑠𝑠 = oven dried weight of soil (g)
The corresponding soil particle diameter (mm) was calculated from:
𝐵𝐵 = 𝐴𝐴 �𝐿𝐿 𝑠𝑠� (5.3)
where,
𝐿𝐿 = effective length (cm)
= −0.1642 ∗ 𝐶𝐶𝐶𝐶𝐶𝐶 + 16.31
𝑠𝑠 = settling time (min)
Even though the pipette method is fairly similar to the hydrometer method as both the methods
are based on gravitational sedimentation, it is more accurate than the hydrometer method
(Elfaki et al., 2016). This is due to the hydrometer method underestimating the clay content
during soil particle size analysis (Beretta et al., 2014) and also having a larger sampling zone
than the pipette method (Durner et al., 2017). For these reasons, the pipette test was conducted
to validate the percent finer values obtained from the proposed automated hydrometer method.
Stokes’ law was used to determine the settling time of soil particles of equivalent diameters of
2, 5, 10, 20 and 40 μm at a depth of 10 cm. In this calculation, soil density and viscosity at 22ºC
was, assumed to be 2.65 g cm-3 and 0.0098 g cm-1 s, respectively. A 10 mL pipette was used to
collect soil suspension and transferred in a steel container for oven drying. After the final
reading, the suspended soil was carefully poured off, and the remaining sediment washed
repeatedly to obtain the sand fraction.
Percentage finer from the pipette method was obtained by using the following equation,

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
153
Percent finer = �𝑚𝑚𝑝𝑝𝑉𝑉𝑝𝑝� −
𝑚𝑚(𝑁𝑁𝑎𝑎𝐶𝐶𝑂𝑂3)6𝑉𝑉𝑝𝑝(𝑁𝑁𝑎𝑎𝐶𝐶𝑂𝑂3)6� � �𝑚𝑚𝑠𝑠
𝑉𝑉𝑠𝑠� �� (5.4)
where,
𝑚𝑚𝑝𝑝 = mass of soil in Pipette
𝑉𝑉𝑝𝑝 = volume of soil in Pipette
𝑚𝑚𝑠𝑠 = oven-dried soil mass
𝑉𝑉𝑠𝑠 = volume of solution in the cylinder
𝑚𝑚(𝑁𝑁𝑎𝑎𝐶𝐶𝑂𝑂3)6= mass of sodium hexametaphosphate
𝑉𝑉𝑝𝑝(𝑁𝑁𝑎𝑎𝐶𝐶𝑂𝑂3)6 = volume of sodium hexametaphosphate
5.4 Results and Discussions
The converted hydrometer reading for every 5 seconds for a clay loam sample is plotted against
time in Figure 5.6. The hydrometer reading drop very quickly until about 40 minutes, and the
dropping rate reduces after the bulk proportion of silt settles below the zone of influence of the
hydrometer. After 6 hours and 30 minutes, the slope flattens as most of the soil sediments
passed the effective length of the hydrometer, and only soil colloids remain.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
154
Figure 5.6 Graph of hydrometer reading vs. time obtained from the automated hydrometer
method for a clay loam.
Percent finer and diameter of the soil particles were calculated for every 5 seconds and plotted
against each other. The continuous particle distribution for five clayey and sandy representative
soil samples are illustrated in Figure 5.7. Percent of particles finer from 2 μm to 40 μm diameter
were shown for five soil samples. Among these soil samples, Westwood 1, Westwood 2 and
Narrabri 2 are clay loams, and the rest are clays according to the Australian soil classification
system. The percent finer varies only between 40.1% to 48.5% for Nowley 1, and 46.5% to
53.7% for Nowley 2 as clay contents are 33.4% and 57.5%, respectively. In contrast, percent
finer varies 66.26% to 83.46% for Nowley 3 soil sample as clay content is about 73.8%. Some
irregularities can be observed for the particle sizes <5 μm for Nowley 1 and Nowley 2 soil
samples.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
155
Figure 5.7 Percent mass finer and the diameter of soil samples obtained from the automated
hydrometer method.
The percentage of mass finer than the defined particle diameter obtained from the pipette
method shows a strong correlation with the results obtained from the automated hydrometer
method for Nowley 1, Nowley 2, Lansdowne 1, Rawson and Nowley 3 soil sample (Figure
5.8). The tests were done in a temperature-controlled room, so variation in temperature was <
2ºC.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
156
Figure 5.8 Comparison of % finer from Pipette vs. Automated Hydrometer Method Trial-1 and
Trial-2 for the particle diameters of 2, 5, 10, 20 and 40 μm.
From the comparison of the percentages of finer obtained from these two methods, R2 values
vary from 0.857 to 0.896.
5.4.1 Repeatability
The establishment of a measurement method requires measures of comparability with the
conventional method, the amount of accidental and systematic errors, and the repeatability of
similar results (Papuga et al., 2018). In addition, the uncertainty in the measurement is also a
requirement for soil testing laboratories seeking to retain ISO/IEC 17025 accreditation. In this
study, the repeatability of the proposed automated hydrometer method was tested. The same
test was repeated 24 hours after the first test. All experimental conditions such as temperature,
lighting condition, etc. and suspension concentration were held constant for both tests.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
157
From the repeatability analysis test, it is clear that this method can produce similar results under
similar environmental conditions. Percent finer for all five particle sizes (2, 5, 10, 20 & 40 μm)
obtained from two trials is plotted in Figure 5.9. From the graph, it is found that the percent
finer obtained from these two trials are similar to each other with an R2 of 0.93 and a root-
mean-square error of 3.13%.
Figure 5.9. Automated Hydrometer method Trial-1 vs. Trial-2 for the particle diameters of 2,
5, 10, 20 & 40 μm.
One of the unique features of the proposed automated hydrometer method is that the
temperature of the solution can be measured for every 5 seconds. Variation of the temperature
can affect the viscosity of the fluid, which plays a vital role in Stokes’ law. Generally, the
variation in the temperature in a controlled laboratory is negligible and does not affect the
particle size calculation. For example, in the Nowley 2 soil sample, assuming a constant
suspension temperature of 20 ºC, resulted in mean clay content of 57.21% as compared to
57.45% when accounting for temperature in the calculation. Monitoring suspension

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
158
temperature is beneficial when a significant variation in the suspension temperature is
observed. For example, a 2ºC suspension temperature variation could cause a change in
particle-size of 1%.
On the other hand, this method has some limitations as well. Setting up of the ToF and
temperature sensors requires about 50-65 seconds. Generally, hydrometer takes about 30-40
seconds to provide a stable reading, and we cannot rely on the first 30-40 seconds reading in
the conventional hydrometer method. The automated hydrometer system takes an additional
20-25 seconds to set up, so only soil particles less than 40 μm in diameter can be measured
accurately. But the setting time can be minimized to less than 40 seconds by reducing the set-
up time of ToF and temperature sensors. This will help to obtain more reliable results for larger
particles of soil.
5.5 Conclusions
In this chapter, an automated hydrometer testing method using Adafruit VL6180X ToF
distance sensor and DS18B20 1-Wire digital temperature sensor is introduced. Using this
technique, hydrometer reading, and suspension temperature were recorded every 5 seconds
using an Arduino Uno R3 device for 8 hours. A stability check was performed on the ToF
sensor with ± 2 mm drift observed over a 24 hour period. Ten different soil samples were tested
using the pipette and automated hydrometer method, and similar percent finer was found from
both methods. Also, the repeatability of this proposed method was tested by repeating the same
test after 24 hours of the first trial and was found to produce a similar percent finer for the same
soil samples. Overall R2 values of the pipette method and the automated hydrometer method
were 0.857 to 0.896, respectively. A particle-size distribution curve can be generated instantly
after the test covering the 2-40 μm range. Previous attempts for automating the sedimentation
methods are complex, expensive and less accurate for silt and clay fractions (Zhang & Tumay

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
159
1995; Nemes et al. 2002; Kovács et al. 2004). This proposed automated technique is easy,
cheaper and provides similar accuracy compared to conventional methods of soil particle size
analysis.
In the future, these experiments should be performed for a wider range of soil textures. Also,
the whole system should be placed in a customized stand for raising and lowering the ToF
sensor smoothly. The hardware cost to convert a traditional hydrometer into an automated
system including the Adafruit VL6180X Time of Flight Distance (ToF), DS18B20 1-Wire
digital temperature sensor and Arduino Uno R3 is approximately $70 USD which is one of the
main advantages of this procedure. This method has the potential to replace the manual
hydrometer reading and provide an automated continuous and precise method of soil particle
size analysis.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
160
5.6 References
Arriaga, F.J., B. Lowery, and M.D. Mays. 2006. A fast method for determining soil particle
size distribution using a laser instrument. Soil Sci. 171(9): 663–674.
Beretta, A.N., A. V Silbermann, L. Paladino, D. Torres, D. Bassahun, et al. 2014. Soil texture
analyses using a hydrometer: modification of the Bouyoucos method. Cienc. e
Investig. Agrar. 41(2): 263–271.
Beuselinck, L., G. Govers, J. Poesen, G. Degraer, and L. Froyen. 1998. Grain-size analysis by
laser diffractometry: comparison with the sieve-pipette method. Catena 32(3–4): 193–
208.
Buchan, G.D. 1989. Applicability of the simple lognormal model to particle-size distribution
in soils. Soil Sci. 147(3): 155–161.
BSI, B. 1990. Methods of test for soils for civil engineering purposes. British Standards
Institution Milton Keynes, UK.
Coates, G.F., and C.A. Hulse. 1985. A comparison of four methods of size analysis of fine-
grained sediments. New Zeal. J. Geol. Geophys. 28(2): 369–380.
De Camargo, O. A., Moniz, A. C., Jorge, J. A. & Valadares, J. 1986. Métodos de análise
química, mineralógica e física de solos do Instituto Agronômico de Campinas.
Durner, W., S.C. Iden, and G. von Unold. 2017. The integral suspension pressure method (ISP)
for precise particle‐size analysis by gravitational sedimentation. Water Resour. Res.
53(1): 33–48.
Elfaki, J.T., M.A. Gafer, M.M. Sulieman, and M.E. Ali. 2016. Hydrometer method against
pipette method for estimating soil particle size distribution in some soil types selected
from Central Sudan. Int. J. Eng. Res. Adv. Technol. 2(2): 25–41.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
161
Eshel, G., G.J. Levy, U. Mingelgrin, and M.J. Singer. 2004. Critical evaluation of the use of
laser diffraction for particle-size distribution analysis. Soil Sci. Soc. Am. J. 68(3):
736–743.
Ferro, V., and S. Mirabile. 2009. Comparing particle size distribution analysis by sedimentation
and laser diffraction method. J. Agric. Eng. 40(2): 35–43.
Gee, G.W., and D. Or. 2002. 2.4 Particle-size analysis. Methods soil Anal. Part 4(598): 255–
293.
Greiner, E.S. 1959. Zone melting of boron. J. Appl. Phys. 30(4): 598–599.
Grohmann, F. & Van Raij, B. 1977. Dispersao mecanica e pre tratamento para analise
granulometrica de Latossolos argilosos. Revista brasileira de ciencia do solo.
Hajnos, M., J. Lipiec, R. Świeboda, Z. Sokołowska, and B. Witkowska-Walczak. 2006.
Complete characterization of pore size distribution of tilled and orchard soil using
water retention curve, mercury porosimetry, nitrogen adsorption, and water desorption
methods. Geoderma 135: 307–314.
ISO 11277. 2009. Soil quality—determination of particle size distribution in mineral soil
material—method by sieving and sedimentation.
Jacob, H.D., G.T. Clarke, and W.A. Dick. 2002. Methods of Soil Analysis Part - 4 Physical
Methods: SSSA Book Series - 5. Soil Science Society of America.
Kettler, T. A., Doran, J. W., & Gilbert, T. L. 2001. Simplified method for soil particle-size
determination to accompany soil-quality analyses. Soil Science Society of America
Journal, 65(3), 849–852.
Kovács, B., I. Czinkota, L. Tolner, and G. Czinkota. 2004. The determination of particle size
distribution (PSD) of clayey and silty formations using the hydrostatic method. Acta

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
162
Mineral. 45: 29–34.
Kroetsch, D., and C. Wang. 2008. Particle size distribution. Soil Sampl. methods Anal. 2.
Lara, O.G., and W.J. Matthes. 1986. Sedigraph as an Alternative Method to the Pipet.
Proceedings of the Fourth Federal Interagency Sedimentation Conference March 24-
27, 1986, Las Vegas, Nevada.
Loveland, P.J., W.R. Whalley, K.A. Smith, and C.E. Mullins. 2000. Particle size analysis.
Smith Ka; Mullins Ce Soil Anal. methods: 281–314.
Ma, Z., H.G. Merkus, H.G. van der Veen, M. Wong, and B. Scarlett. 2001. On‐line
Measurement of Particle Size and Shape using Laser Diffraction. Part. Part. Syst.
Charact. Meas. Descr. Part. Prop. Behav. Powders Other Disperse Syst. 18(5‐6): 243–
247.
Marshall, T.J. 1947. Mechanical composition of soil in relation to field descriptions of texture.
Council for Scientific and Industrial Research.
Miller, W.P., D.E. Radcliffe, and D.M. Miller. 1988. An historical perspective on the theory
and practice of soil mechanical analysis. Publ. J. Agron. Educ. 17: 24–28.
Minasny, B., and A.B. McBratney. 2001. The australian soil texture boomerang: a comparison
of the australian and USDA/FAO soil particle-size classification systems. Soil Res.
39(6): 1443–1451.
Minasny, B., A.B. McBratney, and K.L. Bristow. 1999. Comparison of different approaches to
the development of pedotransfer functions for water-retention curves. Geoderma
93(3–4): 225–253.
Naime, J.M., C.M.P. Vaz, and A. Macedo. 2001. Automated soil particle size analyzer based
on gamma-ray attenuation. Comput. Electron. Agric. 31(3): 295–304.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
163
Nemes, A., J.H.M. Wösten, A. Lilly, and J.H.O. Voshaar. 1999. Evaluation of different
procedures to interpolate particle-size distributions to achieve compatibility within
soil databases. Geoderma 90(3–4): 187–202.
Nemes, A., I. Czinkota, G. Czinkota, L. Tolner, and B. Kovacs. 2002. An automated system
for the quasi-continuous measurement of the particle size distribution. Proceedings of
the 17th World Congress of Soil Science. Bangkok, Thailand. p. 935.
Padarian, J., B. Minasny, and A. McBratney. 2012. Using genetic programming to transform
from Australian to USDA/FAO soil particle-size classification system. Soil Res.
50(6): 443–446.
Papuga, K., J. Kaszubkiewicz, W. Wilczewski, M. Staś, J. Belowski, et al. 2018. Soil grain size
analysis by the dynamometer method–a comparison to the pipette and hydrometer
method. Soil Sci. Annu. 69(1): 17–27.
Rawle, A. F. 2015. Best practice in laser diffraction–a robustness study of the optical properties
of silica. Procedia engineering 102: 182–189.
Robinson, D.A., and S.P. Friedman. 2001. Effect of particle size distribution on the effective
dielectric permittivity of saturated granular media. Water Resour. Res. 37(1): 33–40.
Rousseva, S.S. 1997. Data transformations between soil texture schemes. Eur. J. Soil Sci.
48(4): 749–758.
Ryżak, M., and A. Bieganowski. 2011. Methodological aspects of determining soil particle‐
size distribution using the laser diffraction method. J. Plant Nutr. Soil Sci. 174(4):
624–633.
Sedigraph, I.M. 1976. 5000D Particle Size Analyzer. Micromeritics Instrum. Corp.
Norcross/USA.

Chapter 5: Automated Soil Particle Size Analysis Using Time of Flight Distance Ranging Sensor
164
Shiozawa, S., and G.S. Campbell. 1991. On the calculation of mean particle diameter and
standard deviation from sand, silt, and clay fractions. Soil Sci. 152(6): 427–431.
Shirazi, M.A., J.W. Hart, and L. Boersma. 1988. A unifying quantitative analysis of soil
texture: improvement of precision and extension of scale. Soil Sci. Soc. Am. J. 52(1):
181–190.
Skinner, J. 2000. Pipet and X-Ray Grain-Size Analyzers: Comparison of Methods and Basic
Data. Fed. Interag. Sediment. Proj.
Slawinski, C., R.T. Walczak, and W. Skierucha. 2006. Error analysis of water conductivity
coefficient measurement by instantaneous profiles method. Int. agrophysics 20(1): 55.
Starr, G.C., P. Barak, B. Lowery, and M. Avila-Segura. 2000. Soil particle concentrations and
size analysis using a dielectric method. Soil Sci. Soc. Am. J. 64(3): 858–866.
Stokes, G.G. 1851. On the effect of the internal friction of fluids on the motion of pendulums.
Pitt Press Cambridge.
Swithenbank, J., J.M. Beer, D. Taylor, D. Abbot, and G.C. McCreath. 1976. A laser diagnostic
technique for the measurement of droplet and particle size distribution. 14th
Aerospace Sciences Meeting. p. 69
Vaz, C.M.P., J.C.M. Oliveira, and K. Reichardt. 1992. Soil mechanical analysis through
gamma ray attenuation. SMR 705: 24.
Yang, Y., L. Wang, O. Wendroth, B. Liu, C. Cheng, et al. 2019. Is the Laser Diffraction Method
Reliable for Soil Particle Size Distribution Analysis? Soil Sci. Soc. Am. J.
Zhang, Z., and M.T. Tumay. 1995. Granulometric evaluation of particle size using suspension
pressure during sedimentation. Geotech. Test. J. 18(1): 121–129.

165
CHAPTER 6
MEASURING SOIL BULK DENSITY FROM SHEAR WAVE
VELOCITY USING PIEZO-ELECTRIC SENSORS
This chapter is published as:
Murad, M. O. F., Minasny, B., Malone, B., & Crossing, K. (2020). Measuring soil bulk density
from shear wave velocity using piezoelectric sensors. Soil Research.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
166
6.1 Summary
Bulk density and soil stiffness moduli are vital physical parameters related to soil compaction,
porosity, moisture storage capacity, soil penetration resistance, and structural integrity. These
parameters can be used as indicators of root penetrability and seed germination. Conventional
methods for measuring soil density are destructive, time-consuming, and often require skilled
operators to conduct the tests. Measuring stiffness moduli using conventional techniques are
complex, expensive, and often difficult to measure within a wide range of strain level. A new
soil density and stiffness moduli measurement technique that can evaluate soil density and
stiffness moduli more rapidly, efficiently and precisely, at a low cost is introduced here. This
study evaluated the use of shear wave velocity measurements using the piezo-electric extender
and bender elements as a viable alternative to soil density and stiffness moduli of soil. To test
this idea, soda-lime glass beads less than 0.002, 0.04 - 0.07 mm and 1.00 -1.30 mm diameter
were used to develop the empirical relationship between the shear wave velocity and the bulk
density of soil in a laboratory condition. These empirical equations were then tested on sands
and clayey soils to validate the empirical relationships. In this analysis, bulk density can be
well predicted with shear wave velocity at a frequency of 20 Hz. The accuracy in terms of co-
efficient of determination (R2) and root mean squared error (RMSE) from the current and
existing studies and frequencies varied
between 0.91 to 0.93 and 0.073 to 0.177g cm-3, respectively. Both Shear and Young modulus
were compared with the shear wave velocity of soil with R2 and RMSE between 0.96-0.97 and
0.48-3.5MPa, respectively. The major advantage of this technique is the input and output signal
data can be stored in a computer that can be used to calculate soil density and stiffness moduli
automatically. In the future, a robust probe system can be designed to implement this technique
so that it can be used in the field under variable moisture conditions. This technique can play a
vital role in improving crop yield and soil management practices.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
167
6.2 Introduction
Bulk density is one of the major soil physical parameters that indicate the soil’s capability to
support its structural integrity, and the movement of air, water, heat, and solutes (Kramer &
Boyer, 1995). Bulk density can be an indication of soil compaction, which determines the rate
of seed germination and root penetrability (Bengough et al., 2005). In addition, soil physical,
chemical and biological measurements require density measurement in order to convert mass
basis to volumetric basis for soil quality assessment, such as soil carbon stocks (Arshad &
Martin, 2002; Adhikari et al., 2014).
Bulk density of soil is usually measured gravimetrically or indirectly using a gamma-ray
absorption instrument. Core, clod, and excavation methods are commonly used in direct
techniques based on the gravimetric analysis. However, there are problems and shortcomings
with the gravimetric basis method. The accountability of laboratory tests depends mostly on
the ability to recreate the conditions found in the field. As this test requires soil sampling, there
is always a possibility that the samples will be disturbed in the sampling process, which could
result in inaccurate testing. Another possible source of error in sampling is the disturbance in
the soil by compression during the insertion of the ring sampler.
While gamma radiation is highly accurate, its radiation source limits its practical application
(Lobsey & Viscarra Rossel, 2016; Pires, 2018; Sun, Wang, & Wang, 2019). All types of nuclear
gauges are potential health hazards, and strict regulations must be maintained during the
measurements (Lobsey & Viscarra Rossel, 2016). Like the methods based on the gravimetric
analysis, a small amount of disturbance could take place during this operation, where the access
hole is required. The presence of stones in the soil causes difficulties either by preventing the
insertion of access holes to the full depths or affecting the source/detector separation. In
general, the bulk density of soil in the presence of stone may be overestimated. Also, the initial

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
168
cost gamma-ray gauges are considerably high compared to the methods based on the
gravimetric analysis (Al-Shammary et al., 2018).
Strain level is the measure of deformation resulting from the application of an external stress
(Puttlitz et al., 2019). Soils generally behave as a nonlinear and plastic material, but at the strain
levels below 10-3 %, it is usually considered to be elastic and linear in nature (Haeri & Fathi,
2018; Lourenço, dos Santos, & Pinto, 2017; Mucciacciaro & Sica, 2018; Raja & Maheshwari,
2016). Soil exhibits a quasi-elastic behaviour at the strain range of about 10-6 to 10-5 (Danne &
Hettler, 2017; Mandolini, 2018). Both the Young and Shear modulus behave independently
with the strain amplitude, related to a maximum limit value, and are known as initial shear (G0)
and young (E0) moduli. G0 and E0 are essential parameters for evaluating the shear modulus
and young modulus of soil. These shear moduli are related to soil bulk density.
There is a need to have an efficient and rapid soil density evaluation, at a low cost, which also
must be balanced with the appropriate precision and accuracy. This study will evaluate the use
of shear wave velocity measurements using the piezo-electric sensor as a viable alternative to
soil density and stiffness moduli estimation. Few studies have been conducted where piezo-
electric sensors were used to generate shear wave velocity for engineering purposes (Munoz &
Caicedo, 2013; Park et al., 2018; Yang et al., 2018; Zeng & Hlasko, 2005). In this study, a low-
cost system using BitScope Micro Oscilloscope & Analyzer was used to calculate soil density
and stiffness moduli automatically.
6.3 Background Study and Theory
The strain is the deformation in the direction of the applied force divided by the initial length
of the material, as shown in equation 6.1 (Gilmore, 2014). When the deformation in the material
is too small, the material will return to its original state after withdrawing the stress applied to
it, which is known as Elastic deformation.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
169
𝑆𝑆𝑠𝑠𝑆𝑆𝑎𝑎𝑆𝑆𝑆𝑆 = 𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝐷𝑎𝑎𝑡𝑡𝑖𝑖𝐷𝐷𝐷𝐷 𝑂𝑂𝐷𝐷𝑖𝑖𝑔𝑔𝑖𝑖𝐷𝐷𝑎𝑎𝑂𝑂 𝐶𝐶𝐷𝐷𝐷𝐷𝑔𝑔𝑡𝑡ℎ
(6.1)
ince agricultural soil is generally subjected to low stresses compared to those that carry the
foundation of a structure, a small amount of strain is produced. Thus, it is useful to study the
stiffness moduli of soil at a low strain level. The stiffness moduli of soil (Young and Shear
modulus) are mechanical properties of soil that have a strong relationship with water content
and bulk density of soil (Kézdi, 1980). Bravo et al. (2012) studied three clay soil samples
collected from a sugarcane field at different depths. In that study, it was found that Young
modulus declines gradually when the water content is larger than 25% and increases rapidly
under dry conditions. Also, the state of plastic deformation was achieved by the loose soil at
an average Young modulus of 40 MPa. Bravo et al. (2012) also found a non-linear relationship
between water content and the shear strength of a clayey soil at different depths of a sugarcane
field. The shear strength of the soil decreases rapidly with the increasing water content. After
20% of water content, the void spaces between the soil particles are mostly filled with water,
and the strength of soil mainly depends on pore water pressure.
In the laboratory, the triaxial test has been used to measure the stiffness modulus of soils
(Kokusho, 1980). But this instrument is limited in its measurable response of strain range and
accuracy restrictions. Wetting deformation of coarse-grained soil varies typically with the cell
pressure and wetting stress level, which is challenging to maintain in the Triaxial test (Song &
Jun-Gao, 2007). Additionally, the principal stress on the soil specimen in the triaxial tests does
not continuously rotate, and the two loading conditions (compression and extension) are
applied alternatively during each leading cycle. Moreover, the parts of the triaxial apparatus
that are subjected to continuous movement are affected by mechanical friction and can become
highly sensitive. As a result of the internal energy loss, it becomes unreliable for measuring
soil modulus at a small strain level (Kokusho, 1980).

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
170
Many studies have been done to overcome these issues. Shear-wave velocity (VS) is one of the
essential parameters for determining the dynamic properties of soils. Like other types of body
waves, travel through the inner layers of the earth surface (Voigt et al., 2005). Shear wave
velocity of granular soils at strain levels less than 10−3% have been widely used to evaluate
different moduli of soil (Choi & Stewart, 2005; Gilmore, 2014; Lee et al., 2014; Patel, Bartake,
& Singh, 2008; Burland, 1989; Jardine & Sparks, 1984; Moore et al., 2003; Richart, Hall, &
Woods, 1970; Shibuya et al., 1992; Munoz & Caicedo, 2013; Park et al., 2018; Yang et al.,
2018). Also, the shear wave velocity can be used as a primary function of the bulk density of
soil (Gardner et al., 1974; Potter & Stewart, 1998; Keceli, 2012)
A piezoelectric sensor is a type of sensor that exploits the piezoelectric effect. It monitors the
variations of several physical properties such as pressure, acceleration, temperature, strain, or
force by converting the received signals into an electrical charge. Pierre Curie first noticed the
piezoelectric effect in 1880. But the industrial application of these sensors did not start for more
than a hundred years later in the 1950s (Katzir, 2003). The major component of a piezoelectric
sensor is a piezoceramic material. When a high voltage passes through the piezoelectric sensor,
its dimensions change due to the expansion of piezo material. There are different piezoelectric
materials that can be used for producing acoustic wave sensors. Among these, the most
common materials are quartz (SiO) and lithium tantalate (LiTaO) (Drafts, 2001). Commonly,
piezoceramics are used as actuators, and polymer piezo films are used as sensing materials. For
self-sensing actuators, piezoceramics can be used for both sensing and actuation (Dosch,
Inman, & Garcia, 1992).
(Walter & Lawrence, 1965) demonstrated one of the first applications of piezoelectric
transducers in shear wave testing in sand and clay. For generating and receiving signals, he
used shear-plate transducers. That was the first time he used shear wave, rather than the
longitudinal wave, to study the possibility of stress wave propagation through the soil.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
171
In 1978, shear wave velocity and attenuation in kaolinite clay sediments were measured using
the ceramic bender transducer. For measuring the shear wave velocity, a single-cycle pulse
with a peak-to-peak amplitude of 600 V and a frequency of 338 Hz were used. The received
signal from the transducer was amplified by 40 dB before displaying it into the oscilloscope.
Also, a bandpass filter between 200-1500-Hz was used to get rid of the electrical and
environmental noises. A unique type of transducer was employed, consisting of two transverse-
expansion mode piezoelectric crystals that can generate and receive signals from shear waves.
Those bender transducers have been preferred to shear-plate transducers in many other research
works (Alba, et al., 1984; Dyvik & Madshus, 1985; Horn, 1980; Schultheiss, 1981).
Based on the earlier development in the field of piezoelectric transducers, Horn studied
different dynamic properties of unconsolidated sediments in the laboratory (Horn, 1980). In
that study, saturated sand sediments were subjected to shear wave propagation in a specially
designed sedimentation chamber using a pair of piezoelectric ceramic transducers.
The working principle of all piezoelectric transducers is based on two different types of body
waves (P or compressional wave and S or shear wave). The wave that generates when energy
is applied at right angles to a medium is known as P-wave. A particle moves in the direction of
propagation of the wave, as shown in Figure 6.1. So, the soil particles are subjected to
alternative compression and tension or pulled apart as the waves propagate. These are the
fastest among the body waves. S-wave or shear wave is another type of body wave. It generally
forms when energy is applied in a direction parallel to the surface of a medium, as shown in
Figure 6.1. S-wave does not propagate through fluids.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
172
Figure 6.1. Propagations of P and S waveform through a 3-D grid (after E. Onajite, 2014)
Gardner et al. (1974) found that there is a strong correlation between S-wave velocity (𝑉𝑉𝑆𝑆) and
bulk density (𝜌𝜌) and established the following empirical relationship,
𝜌𝜌 = 𝛼𝛼 𝑉𝑉𝑠𝑠 𝛽𝛽 (6.2)
Potter & Stewart (1998) estimated coefficients 𝛼𝛼 and 𝛽𝛽on a shale-filled and a porous sand-
filled channel in Alberta, Canada and obtained 𝛼𝛼 = 0.37 and 𝛽𝛽 = 0.22.
Asten & Boore (2005) analyzed data from previous studies and summarised two equations for
a different range of shear-wave and compressional-wave velocity for determining the bulk
density of soil.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
173
When P- wave velocity,
𝑉𝑉𝐶𝐶 < 1.50 𝑠𝑠𝑚𝑚 𝑠𝑠−1,
𝜌𝜌 = 1.93 𝑔𝑔 𝑠𝑠𝑚𝑚−3
When P- wave velocity,
1.50 𝑠𝑠𝑚𝑚 𝑠𝑠−1 ≤ 𝑉𝑉𝐶𝐶 < 6.0 𝑠𝑠𝑚𝑚 𝑠𝑠−1,
𝜌𝜌 = 1.74𝑉𝑉𝐶𝐶 0.25𝑔𝑔 𝑠𝑠𝑚𝑚−3
(6.3)
When P- wave velocity,
𝑉𝑉𝐶𝐶 ≥ 6.0 𝑠𝑠𝑚𝑚 𝑠𝑠−1,
𝜌𝜌 = 1.6612𝑉𝑉𝐶𝐶 − 0.4721𝑉𝑉𝐶𝐶2 + 0.0671𝑉𝑉𝐶𝐶3 − 0.0043𝑉𝑉𝐶𝐶4 + 0.000106𝑉𝑉𝐶𝐶5
(6.4)
For shear wave velocity, the same equations of 𝑉𝑉𝐶𝐶 can be used to determine the bulk density of
soil.
For S- wave velocity,
0.30 𝑠𝑠𝑚𝑚 𝑠𝑠−1 ≤ 𝑉𝑉𝑆𝑆 < 3.55 𝑠𝑠𝑚𝑚 𝑠𝑠−1,
𝜌𝜌 = 1.74𝑉𝑉𝐶𝐶0.25𝑔𝑔 𝑠𝑠𝑚𝑚−3
For S- wave velocity,
(6.5)
3.55 𝑠𝑠𝑚𝑚 𝑠𝑠−1 ≤ 𝑉𝑉𝑆𝑆
𝜌𝜌 = 1.6612𝑉𝑉𝐶𝐶 − 0.4721𝑉𝑉𝐶𝐶2 + 0.0671𝑉𝑉𝐶𝐶3 − 0.0043𝑉𝑉𝐶𝐶4 + 0.000106𝑉𝑉𝐶𝐶5
𝑉𝑉𝐶𝐶 ( 𝑠𝑠𝑚𝑚 𝑠𝑠−1) = 0.9409 + 2.094𝑉𝑉𝑆𝑆 − 0.8206𝑉𝑉𝑆𝑆2 + 0.9409 + 2.094𝑉𝑉𝑆𝑆− 0.8206𝑉𝑉𝑆𝑆2 + 0.2683𝑉𝑉𝑆𝑆3 − 0.0251𝑉𝑉𝑆𝑆4
(6.6)
Keceli (2012) modified Gardner’s equation using sedimentary rocks, which can be expressed,
as shown in equation 6.7.
𝜌𝜌 = 0.44 𝑉𝑉𝑆𝑆 0.25
(6.7)

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
174
Most studies for measuring soil density using piezo-electric sensors have been performed on
sands for engineering purposes (Park et al., 2018; Yang et al., 2018). It is notable that this
technique has not been utilized for measuring soil density for agricultural contexts.
Both time and frequency domain signal analysis techniques are used to evaluate Shear and
Young modulus of soil (Da Fonseca, Ferreira, & Fahey, 2008; Greening & Nash, 2004;
Viggiani & Atkinson, 1995). Bender elements that were used in these studies are made of
piezo-ceramic materials, and the maximum strain generated by a piezoelectric sensor is 10-3 %,
which lies within the elastic range of soils (Dyvik & Madshus, 1985). Many other studies were
conducted on the measurement of small strain stiffness modulus by the velocities of elastic
waves propagating through the soil particle (Burland, 1989; Jardine & Sparks, 1984; Moore et
al., 2003; Richart et al., 1970; Shibuya et al., 1992). The advantage of stiffness modulus using
elastic waves for the determination of stiffness modulus, and shear waves, is that the tests can
be performed both in laboratory and field conditions in a non-destructive manner.
6.4 Materials and Method
Piezo bender and extender elements are the main components of the Piezo-electric technique
for soil density measurement. These sensors were used as a transmitter for input signals and
receiver for output signals. A standard quick-mount piezo bender (Q220-A4-303YB) (Figure
6.2) and a piezo extender (Q220-A4-303XE) were used to produce and transmit the shear wave
through the soil and to receive the shear wave and then convert it to a digital signal.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
175
Figure 6.2. Standard quick-mount Piezo Bender (Q220-A4-303YB) sensor that transmits shear
wave velocity through the soil surface
The transmitter and receiver of the piezo bender and extender sensors were attached to two
steel probes. The sensors were separated by a distance of 60 mm. There was no joint between
the probes to avoid the transmission of the waves through the joints, as shown in Figure 6.3. In
the future, the probes will be attached together using a steel connector with rubber vibration
isolation joints to maintain constant clearance between the sensors.
Figure 6.3. Schematic diagram of the setup of the piezoelectric sensor probe system embedded
in the soil in a glass beaker.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
176
After setting up the bender and extender elements at a separation distance of 60 mm, BitScope
software was used to trigger the input signal from the transmitter. Square waves were produced
as input signals using a BitScope Micro Oscilloscope & Analyzer. The elastic stress waves
released when activated by an alternating electric charge from the square waves and of the one
layer of piezo sensor expands and the other contracts causing the sensor to flex, as shown in
Figure 6.4.
Figure 6.4. Mechanism of wave propagation of 2-Layer Piezo-electric Bender and Extender
elements between the transmitter and the receiver
The transmitted signal was then received by the receiver to measure the strength and frequency
of the waves. A linear amplifier was used to amplify the voltage before sending the signal to
the receiver. The BitScope Micro Oscilloscope & Analyzer was used to collect the digital signal
and produce a time-domain signal. The output signals were received and analyzed as sine
waves. A low pass filter was used to filter the input and output signal. Both transmitting and

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
177
receiving signals were amplified by a preamplifier before displaying the signals in the BitScope
Micro Oscilloscope & Analyzer as shown in Figure 6.5.
Figure 6.5. The closed system of the piezoelectric sensor
The polarity of the input signal was changed to obtain the sine wave in the opposite direction.
Theoretically, shear wave velocity can be measured by dividing the distance between the
sensors with the time required by the shear wave to travel this distance, as shown in equation
8 (Dyvik & Madshus, 1985).
𝑉𝑉𝑆𝑆 = 𝐿𝐿𝑆𝑆/𝑠𝑠𝑆𝑆 (6.8)
where,
𝑉𝑉𝑆𝑆 = Shear wave velocity
𝐿𝐿𝑆𝑆 = The distance between the tip of the transmitter and the tip of the receiver
𝑠𝑠𝑆𝑆 = The travel time of the shear wave through the distance L.
The S-wave arrival time can be found by measuring the time required by the wave to travel
from the trigger and the first intersection between the sine waves obtained from different

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
178
polarities. Figure 6.6 shows the square waves in blue and red lines that were used as input
signals. A trigger point was considered when the amplitude of the input signal starts declining
from the peak of the square wave.
Figure 6.6. Arrival times calculated the distance between the trigger, and the first point when
the sine wave starts to form for P wave and the intersection between the sine waves obtained
from different polarities for S-wave
The P-wave arrival time is considered to be the time required by the wave to travel from the
trigger, and the first point when the sine wave starts to form. P- wave arrival time also helps to

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
179
identify the S-wave arrival time when it is difficult to trace the first intersection point between
the sine waves obtained from different polarity due to the noise.
𝑉𝑉𝐶𝐶 = 𝐿𝐿𝐶𝐶/𝑠𝑠𝐶𝐶 (6.9)
where,
𝑉𝑉𝐶𝐶 = P- wave velocity
𝐿𝐿𝐶𝐶 = The distance between the tip of the transmitter and the tip of the receiver
𝑠𝑠𝐶𝐶 = The travel time of the shear wave through the distance L
A low pass filter was used to remove all the unnecessary noises from the output signal. Without
the filter, it was a challenge to distinguish between the actual signal and noise. Figure 6.7 shows
the output signal without the low pass filter. To obtain the travel time of both P and S waves,
it is very important to identify the exact position P and S-wave arrival.
Figure 6.7. Amplitude vs. travel time of output signal without applying low pass filter

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
180
For designing the low pass filter, the Analog Filter Wizard (www.analog.com) was used. The
low pass filter has been designed for the passband of gain 100V/V with -1dB and 100Hz, as
shown in Figure 6.8. Also, the stopband was selected as -40 dB and 700Hz.
Figure 6.8. Optimized design parameters of low pass filter used in the closed system
The 2nd order band-pass filter components (Figure 6.9) from the Analog Filter Wizard were
applied to filter out unwanted noises and to obtain smooth sine waves as output signals.
Figure 6.9. Schematic diagram of low pass filter used in the closed system with piezoelectric
sensor

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
181
After the application of the low pass filter, a considerable reduction of the noise in the output
signals was observed, as shown in Figure 6.10. The gain was optimized in such a way that the
peak amplitude does not exceed the cut-off frequency.
Figure 6.10. Improved output signal after applying low pass filter indicating the amplitude of
S-wave against the travel time
There was also an issue of transmitting the electric signal through the soil medium when the
sample was wet. Water particles in the soil sample can conduct electrical signals from the
receiver to the transmitter. To counteract this problem, the piezoelectric sensors were required
to be insulated electrically, but at the same time, the insulating material should not affect the
generation of the mechanical waves. A liquid electrical tape was used as an insulation material.
In this study, glass beads were first used to develop empirical relationships between the shear
wave velocity and the bulk density of soil in an ideal laboratory condition. Three different sizes
of glass beads were used. Soda-lime glass beads less than 0.002, 0.04 - 0.07 mm, and 1.00 -
1.30 mm diameter was considered as clays, silts, and sands, respectively. The experiments were
done in the physical lab for soil at Biomedical building, Australian Technology Park, Sydney.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
182
A small vibratory soil compaction table was used to compact the different-sized glass beads
for 10, 20, and 30 minutes to create different densities. The weight of the glass beads and dry
soil samples was measured in the laboratory with a weighing scale. The volume and bulk
density of the soil was calculated from equation (10), respectively.
𝜌𝜌 = 𝑉𝑉 𝑉𝑉� (6.10)
Where,
𝜌𝜌 = Density of soil
𝑉𝑉 = Weight of soil
Afterward, sands and two types of clayey soils were used to validate the empirical equations
that were derived from the glass beads. These soil samples were dried and crushed before
sieving through a 2 mm sieve. The characteristics of these soils are described in Table 6.1.
Similar to the glass beads, a vibratory table was used to compact the sandy and clayey soils for
10, 20 and 30 minutes.
Table 6.1. Characteristics of soil samples used for the tests
Site Soil type Clay Silt Fine Sand Coarse Sand Texture class
%
Sodosol Dermosol 57.5 19.7 4.3 18.5 Clay
Narrabri Vertosol 73.8 7.5 5.1 13.6 Clay
The shear wave velocities obtained from the tests with the glass beads and soils were used to
measure the stiffness moduli using the empirical relationships between density and shear wave
velocity of soils. Shear modulus of the soil was calculated using the following equation,

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
183
𝐺𝐺 = 𝜌𝜌𝑉𝑉𝑆𝑆2 (6.11)
Where,
𝐺𝐺 = Shear modulus of soil
𝑉𝑉𝑆𝑆 = Shear wave velocity
Both Shear modulus and the Poisson’s ratio are the functions of Young modulus. Poisson’s
ratio was calculated from the relationship with Shear and Bulk modulus of soil, as shown in
equation 14. The Young modulus and Bulk modulus of soil were calculated using the following
equation,
𝐸𝐸 = 2𝐺𝐺(1 + 𝜗𝜗) (6.12)
Where,
𝐸𝐸 = Young modulus of soil
𝐾𝐾 = Bulk modulus of soil
= 𝜌𝜌(𝑉𝑉𝑝𝑝2 −43𝑉𝑉𝑠𝑠2) (6.13)
𝜗𝜗 = Poisson’s ratio
= (3𝐾𝐾 − 2𝐺𝐺)(6𝐾𝐾 − 2𝐺𝐺)� (6.14)
Significant correlations between both Shear and Young modulus with shear wave velocity were
observed.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
184
6.5 Results and discussion
6.5.1 Shear wave velocity at different compactions
Since soils act as elastic material at strain level less than 10−3%, the soil sample will return to
its original shape after a shear force is applied. Adjacent layers of soil will undergo shear and
cause the propagation of the shear wave (Simic, Ivanac, Pustahija, & Brkljacic, 2012).
Figure 6.11 shows a comparison of S-wave arrival time between 0 and 20 minutes of vibratory
compaction of glass beads. The shear wave travelling time decreases with the increasing
compaction applied on the glass beads using a vibratory feeder. Due to the compaction, the
particles of the glass bead and soil particles get closer to each other, which allows the transfer
of the body waves from the transmitter to the receiver faster than a less compacted soil. Δt
indicates the differences between the sand particles with 20 minutes of vibratory compaction
and no vibratory compaction (Figure 6.11).

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
185
Figure 6.11. Comparison in the S-wave travel time between no vibratory compaction and
vibratory compaction for 20 minutes.
6.5.2 Predicting bulk density
Once we have established a method for determining shear wave velocity, glass beads were
compacted for 10, 20, and 30 minutes using a vibratory feeder to achieve the bulk density
within the range of 0.59-1.48 g cm-3. Shear wave velocity was measured using piezoelectric
sensors to compare with the corresponding density of soil. In this study, three different
frequencies (10Hz, 20Hz, and 50Hz) of the input signal were used to find the optimum
frequency for measuring shear wave velocity. Non-linear regression analysis was used to fit a
non-linear model that satisfies the relationship between the shear wave travel time and the
density of soil.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
186
Figure 6.12. An empirical relationship between Shear wave (𝑉𝑉𝑆𝑆) travel time and bulk density
of soil.
Figure 6.12 shows there is a clear relationship between travel time and the bulk density of soil.
The shear wave velocity at 10 Hz provides a better correlation between the 𝑉𝑉𝑆𝑆 and the density
with an R2 of 0.92. R2 values from 20 Hz and 50 Hz were 0.89 and 0.85, respectively. This
relationship indicates that the travel time for the shear wave velocity decreases with increasing
density as the shear wave requires more time to travel through less dense soil.
The travel time of the shear wave from the transmitter to the receiver was then converted to the
shear wave velocity (Equation 8). Empirical relationships between shear wave velocity and
density were derived, as shown in Figure 6.13. Relationships were developed for three different
frequencies of 10, 20 and 50Hz. Bulk density changes abruptly with 𝑉𝑉𝑆𝑆 until around 1 g cm-3.
After that, the slope of the trend line decreases with the increasing 𝑉𝑉𝑆𝑆 and bulk density.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
187
Figure 6.13. An empirical relationship between Shear wave velocity (𝑉𝑉𝑆𝑆) and bulk density of
soil.
Empirical equations 6.15 to 6.17, showed the correlation between the shear wave velocity and
density:
𝜌𝜌 = 0.38𝑉𝑉𝑆𝑆0.27 (10 𝐻𝐻𝐻𝐻) (6.15)
𝜌𝜌 = 0.48𝑉𝑉𝑆𝑆0.21 (20 𝐻𝐻𝐻𝐻) (6.16)
𝜌𝜌 = 0.41𝑉𝑉𝑆𝑆0.25 (50 𝐻𝐻𝐻𝐻) (6.17)
Maximum R2 and minimum root mean squared error (RMSE) for bulk density were found to
be 0.86 and 0.09 g cm-3, respectively, at 10 Hz.
The accuracy of these relationships to predict soil bulk density was tested on real soil
compacted at different densities. In addition, the empirical relationships developed by Potter
& Stewart (1998) and Keceli (2012) (Equation 2) were also tested. The relationships between
the prediction by different models with the actual bulk density are given in Figure 6.14.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
188
Figure 6.14. Comparisons between the actual and predicted bulk density of soil
R2 for 20 Hz was found to be maximum for the density equations obtained from the glass beads
and other studies, but the difference with other frequencies is small, as shown in Figure 6.14.
Table 6.2 shows the statistical comparisons of the density equations obtained from the tests
with Piezoelectric sensors and models from previous studies. All models show a high linear
correlation between the prediction using 𝑉𝑉𝑆𝑆 and bulk density (R2 > 0.9). However, the model
from Potter & Stewart (1998) under-predicted the bulk density. R2 and RMSE between the
different studies and frequencies varied between 0.91 to 0.93 and 0.073 to 0.177 g cm-3.
Empirical equations obtained from the piezoelectric sensor in this study (Equation 2 & 17)
provides minimum RMSE compared to other studies (RMSE = 0.073).

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
189
Table 6.2. Statistical comparisons between the density equations obtained from Piezoelectric
sensor and previous studies
Researcher Equation for density Frequency (Hz) R2 RMSE (g cm-3)
Piezoelectric sensor
0.38𝑉𝑉𝑆𝑆0.26 10 0.91 0.096
0.48𝑉𝑉𝑆𝑆0.21 20 0.93 0.073
0.41𝑉𝑉𝑆𝑆0.25 50 0.91 0.119
Potter & Stewart (1998)
0.37𝑉𝑉𝑆𝑆 0.22
10 0.91 0.141
20 0.93 0.162
50 0.91 0.147
Keceli (2012) 0.44 𝑉𝑉𝑆𝑆 0.25
10 0.91 0.177
20 0.93 0.139
50 0.91 0.172
6.5.3 Shear modulus and 𝑽𝑽𝑺𝑺
The shear wave velocity is a function of Shear modulus. The shear modulus of soil was
calculated using equation 12 and plotted against the shear wave velocity in Figure 6.15. Similar
to the bulk density of soil, a power regression analysis was done between bulk density and
shear wave velocity. Shear modulus also increases with the progressive shear wave velocities.
A linear increment can be observed until 5 M Pa, but the slope of the trend line rises
dramatically after this stage. R2 and the RMSE of all three frequencies are very close, but the
maximum R2 and minimum RMSE can be observed at the frequency of 50 Hz.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
190
Figure 6.15. Empirical relationship between Shear wave velocity (𝑉𝑉𝑆𝑆) and Shear modulus
(𝐺𝐺𝐷𝐷𝑎𝑎𝑚𝑚) of soil.
6.5.4 Young modulus and 𝑽𝑽𝑺𝑺
The bulk modulus of soil was calculated from shear and P-wave velocity using equation 14.
Equation 15 was used to compute Poisson’s ratio from shear and bulk density of soil. Young
modulus of soil was evaluated from equation 13 using Shear modulus and Poisson’s ratio.
Almost similar types of relationships can be observed between the shear wave velocities and
young modulus of soil as shear modulus, and poisons ratio are direct functions of this modulus,
as shown in Figure 6.16. Similar to shear modulus, maximum R2 and minimum RMSE was
found to be 0.97 and 1.4 M Pa for 50 Hz.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
191
Figure 6.16. Empirical relationship between Shear wave velocity (𝑉𝑉𝑆𝑆) and the Young
modulus (𝐸𝐸) of soil.
6.6 Limitations
There are still a few limitations to this technique. The application of this technique in this study
is limited to the laboratory. This prototype was evaluated using a limited number of crushed
dried soil samples. The elastic wave propagation is affected by soil moisture, which has not
been investigated in the paper. More tests need to be done with different types of soil with
various physical, and chemical variances to check the dependency of this technique on these
properties of soil. Also, the Shear and Young moduli obtained from this technique need to be
validated with the conventional methods. To apply this technique in the field, some
modifications will be necessary for the design of the probe to withstand the pressure that will
be exerted in the sensor while pushing these probes into the grounds. This technique will
require the field moisture content for converting the field density to the bulk density of soil.
TDR or FRD sensors can be used to evaluate field moisture to correct the field density of soil.
In addition, a small number of ambient noises in the operational environment, such as

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
192
vibrations from nearby machinery can affect the measurement of the shear wave velocity with
this technique. This technique is non-destructive but invasive. Soil cores are not required for
this technique, but the probes need to be driven into the soil that may alter the physical integrity
of the soil.
6.7 Conclusions
Soil density and stiffness moduli are important parameters for soil management. From the
results, we can observe that the shear wave velocity has a strong relationship with soil density
and stiffness moduli. Piezoelectric sensors appear to be a rapid, cost-effective, convenient tool
for investigating bulk density. In addition, these sensors can also be used for measuring the
stiffness of soil at a small strain level. It is an inexpensive method that can produce accurate
data. One of the key features of this technique is, it can store the input and output signal data
in the computer and calculate soil density and stiffness moduli automatically. In the future, a
robust soil probe system can be implemented based on this technique so that it can be used in
the field to measure soil density and stiffness moduli. It can provide essential information
regarding soil physical properties that are invaluable in agricultural contexts and for assessing
soil function in general.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
193
6.8 References
Adhikari, K., Hartemink, A. E., Minasny, B., Kheir, R. B., Greve, M. B., & Greve, M. H.
(2014). Digital mapping of soil organic carbon contents and stocks in Denmark. PloS
One, 9(8), e105519.
Al-Shammary, A. A. G., Kouzani, A. Z., Kaynak, A., Khoo, S. Y., Norton, M., & Gates, W.
(2018). Soil bulk density estimation methods: a review. Pedosphere, 28(4), 581–596.
Alba, P. De, Baldwin, K., Janoo, V., Roe, G., & Celikkol, B. (1984). Elastic-wave velocities
and liquefaction potential. Geotechnical Testing Journal, 7(2), 77–88.
Arshad, M. A., & Martin, S. (2002). Identifying critical limits for soil quality indicators in
agro-ecosystems. Agriculture, Ecosystems & Environment, 88(2), 153–160.
Asten, M. W., & Boore, D. M. (2005). Blind comparisons of Shear-Wave Velocities at Closely-
Spaced Sites In San Jose , California. Proceedings of a Workshop Held at the US
Geological Survey, Menlo Park, 1–5.
Bengough, A. G., Bransby, M. F., Hans, J., McKenna, S. J., Roberts, T. J., & Valentine, T. A.
(2005). Root responses to soil physical conditions; growth dynamics from field to cell.
Journal of Experimental Botany, 57(2), 437–447.
Bravo, E. L., Suárez, M. H., Cueto, O. G., Tijskens, E., & Ramon, H. (2012). Determination
of basics mechanical properties in a tropical clay soil as a function of dry bulk density
and moisture. Revista Ciencias Técnicas Agropecuarias, 21(3), 5–11.
Burland, J. B. (1989). Ninth Laurits Bjerrum Memorial Lecture:" Small is beautiful"—the
stiffness of soils at small strains. Canadian Geotechnical Journal, 26(4), 499–516.
Chan, C. M. (n.d.). On the intepretation of shear wave velocity from bender element tests 1.
Choi, Y., & Stewart, J. P. (2005). Nonlinear site amplification as function of 30 m shear wave

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
194
velocity. Earthquake Spectra, 21(1), 1–30.
Da Fonseca, A. V., Ferreira, C., & Fahey, M. (2008). A framework interpreting bender element
tests, combining time-domain and frequency-domain methods. Geotechnical Testing
Journal, 32(2), 91–107.
Danne, S., & Hettler, A. (2017). Total and Quasi-Elastic Strains Due to Monotonous and Low-
Cycle Loading by Means of Experimental and Numerical Element Tests. In Holistic
Simulation of Geotechnical Installation Processes (pp. 303–323). Springer.
Dosch, J. J., Inman, D. J., & Garcia, E. (1992). A self-sensing piezoelectric actuator for
collocated control. Journal of Intelligent Material Systems and Structures, 3(1), 166–
185.
Drafts, B. (2001). Acoustic wave technology sensors. IEEE Transactions on Microwave
Theory and Techniques, 49(4), 795–802.
Dyvik, R., & Madshus, C. (1985). Lab Measurements of G m a x Using Bender Elements.
Advances in the Art of Testing Soils under Cyclic Conditions, 186–196.
Gardner, G. H. F., Gardner, L. W., & Gregory, A. R. (1974). Formation velocity and density-
the diagnostic basics for stratigraphic traps. Geophysics, 39(6), 770–780.
Gilmore, C. (2014). Materials Science and Engineering Properties. Cengage Learning.
https://books.google.com.au/books?id=t7wTCgAAQBAJ
Greening, P. D., & Nash, D. F. T. (2004). Frequency domain determination of G 0 using bender
elements. Geotechnical Testing Journal, 27(3), 288–294.
Haeri, S. M., & Fathi, A. (2018). Numerical modeling of rocking of shallow foundations
subjected to slow cyclic loading with consideration of soil-structure interaction. ArXiv
Preprint ArXiv:1808.04492.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
195
Horn, I. W. (1980). Some laboratory experiments on shear wave propagation in unconsolidated
sands. Marine Georesources & Geotechnology, 4(1), 31–54.
Jardine, P. M., & Sparks, D. L. (1984). Potassium-Calcium Exchange in a Multireactive Soil
System: II. Thermodynamics 1. Soil Science Society of America Journal, 48(1), 45–
50.
Katzir, S. (2003). The discovery of the piezoelectric effect. Archive for History of Exact
Sciences, 57(1), 61–91.
Keceli, A. D. (2012). Soil parameters that can be determined with seismic velocities. Jeofizik,
16(1), 17–29.
Kézdi, Á. (1980). Handbook of Soil Mechanics. Vol. 2. Soil Testing. Elsevier Scientific
Publishing Company.
Kokusho, T. (1980). Cyclic triaxial test of dynamic soil properties for wide strain range. Soils
and Foundations, 20(2), 45–60.
Kramer, P. J., & Boyer, J. S. (1995). Water relations of plants and soils. Academic press.
Lee, C.-J., Hung, W.-Y., Tsai, C.-H., Chen, T., Tu, Y., & Huang, C.-C. (2014). Shear wave
velocity measurements and soil–pile system identifications in dynamic centrifuge
tests. Bulletin of Earthquake Engineering, 12(2), 717–734.
Lobsey, C. R., & Viscarra Rossel, R. A. (2016). Sensing of soil bulk density for more accurate
carbon accounting. European Journal of Soil Science, 67(4), 504–513.
Lourenço, J. C., dos Santos, J. A., & Pinto, P. (2017). Hypoelastic UR-free model for soils
under cyclic loading. Soil Dynamics and Earthquake Engineering, 97, 413–423.
Mandolini, A. (2018). Change in elastic properties of sands under very large number of low
amplitude multiaxial cyclic loading. University of Bristol.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
196
Moore, K. P., Wong, F., Gines, P., Bernardi, M., Ochs, A., Salerno, F., Angeli, P., Porayko,
M., Moreau, R., & Garcia‐Tsao, G. (2003). The management of ascites in cirrhosis:
report on the consensus conference of the International Ascites Club. Hepatology,
38(1), 258–266.
Mucciacciaro, M., & Sica, S. (2018). Nonlinear soil and pile behaviour on kinematic bending
response of flexible piles. Soil Dynamics and Earthquake Engineering, 107, 195–213.
Munoz, J. A., & Caicedo, A. (2013). Design of a Density Sensor Based on Piezoelectric
Crystals for the Identification of the Density Profile in a Wastewater Treatment Plant
Settler. IFAC Proceedings Volumes, 46(18), 288–292.
Onajite, E. (2014). Chapter 2 - Understanding Seismic Wave Propagation (E. B. T.-S. D. A. T.
in H. E. Onajite (ed.); pp. 17–32). Elsevier.
https://doi.org/https://doi.org/10.1016/B978-0-12-420023-4.00002-2
Park, S.-S., Lee, J.-S., Lee, D.-E., & Lee, J.-C. (2018). Measurement of Unit Weight of Dry
Sand Using Piezoelectric Sensor. Applied Sciences, 8(11), 2277.
Patel, A., Bartake, P. P., & Singh, D. N. (2008). An empirical relationship for determining
shear wave velocity in granular materials accounting for grain morphology.
Geotechnical Testing Journal, 32(1), 1–10.
Pires, L. F. (2018). Soil analysis using nuclear techniques: a literature review of the gamma ray
attenuation method. Soil and Tillage Research, 184, 216–234.
Potter, C. C., & Stewart, R. R. (1998). Density predictions using Vp and Vs sonic logs.
CREWES Res. Rep, 10, 1–10.
Puttlitz, C. M., Demir, H. V., Labus, K. M., Mcgilvray, K. C., & Unal, E. (2019). Displacement
and deformation monitoring method and system without using any strain sensor, and
components thereof. Google Patents.

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
197
Raja, M. A., & Maheshwari, B. K. (2016). Behaviour of earth dam under seismic load
considering nonlinearity of the soil. Open Journal of Civil Engineering, 6(02), 75.
Richart, F. E., Hall, J. R., & Woods, R. D. (1970). Vibrations of soils and foundations.
Schultheiss, P. J. (1981). Simultaneous measurement of P & S wave velocities during
conventional laboratory soil testing procedures. Marine Georesources &
Geotechnology, 4(4), 343–367.
Shibuya, S., Tatsuoka, F., TEACHAVORASINSKUN, S., KONG, X. J., ABE, F., KIM, Y., &
PARK, C. (1992). Elastic deformation properties of geomaterials. Soils and
Foundations, 32(3), 26–46.
Simic, M., Ivanac, G., Pustahija, A. H., & Brkljacic, B. (2012). Shear wave ultrasound
elastography: from physics to future.
Song, W. E. I., & Jun-Gao, Z. H. U. (2007). Study on wettig behavior of coarse grained soil in
triaxial test. Rock and Soil Mechanics, 28(8), 1609–1615.
Sun, X.-L., Wang, X.-Q., & Wang, H.-L. (2019). Comparison of estimated soil bulk density
using proximal soil sensing and pedotransfer functions. Journal of Hydrology, 579,
124227.
Viggiani, G., & Atkinson, J. H. (1995). Interpretation of bender element tests. International
Journal of Rock Mechanics and Mining Sciences and Geomechanics Abstracts, 8(32),
373A.
Voigt, T., Grosse, C. U., Sun, Z., Shah, S. P., & Reinhardt, H.-W. (2005). Comparison of
ultrasonic wave transmission and reflection measurements with P-and S-waves on
early age mortar and concrete. Materials and Structures, 38(8), 729–738.
Walter, F., & Lawrence, L. J. (1965). Foetal heart-beat detector (Patent No. 3,187,098). DC:

Chapter 6: Measuring Soil Bulk Density from Shear Wave Velocity Using Piezo-Electric Sensors
198
U.S. Patent and Trademark Office.
Yang, W., Kong, Q., Ho, S. C. M., Mo, Y.-L., & Song, G. (2018). Real-Time Monitoring of
Soil Compaction Using Piezoceramic-Based Embeddable Transducers and Wavelet
Packet Analysis. IEEE Access, 6, 5208–5214.
Zeng, X. D., & Hlasko, H. (2005). Cone Penetrometer Equipped with Piezoelectric Sensors for
Measurement of Soil Stiffness in Highway Pavement. 134185

199
CHAPTER 7
CONCLUDING REMARKS AND FUTURE WORKS

Chapter 7: Concluding Remarks and Future Works
200
7.1 Overview
This thesis proposes sensor-based soil physical measurement techniques to obtain fine-scale
soil information rapidly and cost-effectively. In particular, this thesis looks at field sensing and
laboratory sensing methods. The field sensing methods are designed to obtain high-resolution
three-dimensional soil data, with a horizontal spatial scale between 1-5 m, and vertical
resolution of 1-5 cm.
The contents of this thesis can be divided into a field system and a lab system.
The field system includes:
• A crop water use monitoring system at the plot level using a plastic buggy system for
the EMI survey.
• Depth-specific temporal analyses of soil water extraction by different chickpeas
genotypes using data collected from EMI surveys.
• VisNIR penetrometer system for measuring SOC using high-resolution in-situ spectra.
The laboratory sensing system includes:
• Automated hydrometer method for soil particle size analysis using ToF distance sensor
and digital temperature sensor.
• Measuring bulk density and soil stiffness moduli from shear wave velocity using piezo-
electric sensors.
The summary and future recommendations on sensor-based soil physical properties are
outlined below.

Chapter 7: Concluding Remarks and Future Works
201
7.1.1 Plot level soil moisture monitoring using EMI surveys
It is essential to measure soil moisture at the plot scale for plant breeders to monitor extensive
roots under moisture stress and phenotyping (Hurd, 1974; Roitsch et al., 2019). Lack of
moisture is the main limiting factor in increasing crop production in the future (Ali & Talukder,
2008; Richards, 1991). Plant phenotyping can help understand the plant function or target traits
that affect the crop yield, yield stability, efficiency of storing and using resources, quality of
the crop, resistance to various stresses, etc. (Roitsch et al., 2019). However, one of the single
most important limitations is how to monitor crop water uptake in the field. Establishing soil
moisture probes at every experimental plot in a field is not feasible.
To solve this issue of finding the best drought tolerance genotype and phenotyping, an EMI
survey plastic buggy system for soil moisture monitoring at the plot scale was introduced in
Chapter 2. The proposed technique was successfully implemented to quantify soil content at a
plot from multi-layer ECa measurements of 0, 20, 40, 60, and 80 cm above the ground surface.
The stability and temperature effect on EM38-MK2 were checked, and were shown that it was
reasonably stable and capable of recording consistent ECa measurements at a higher field
temperature. Total water uses by different genotypes of chickpeas measured using EMI
surveys, and traditional neutron moisture meter was compared, and a good correlation was
found. This chapter explains the potentiality of using plastic buggy based EMI surveys as a
rapid, efficient, and convenient soil moisture monitoring technique at the plot scale, which can
be beneficial for drought tolerance and plant phenotyping researches.
7.1.2 Depth-Specific Temporal Analyses of Soil Water Extraction
Due to a lack of technologies that allows field phenotyping, our capability to explore the
genetics of traits related to drought, heat, and nutrient efficiency tolerance are limited (Araus
& Cairns, 2014). Effective field-based high-throughput phenotyping platforms (HTPPs) have

Chapter 7: Concluding Remarks and Future Works
202
become necessary for plant breeders (Araus, Kefauver, Zaman-Allah, Olsen, & Cairns, 2018;
Cabrera‐Bosquet, Crossa, von Zitzewitz, Serret, & Luis Araus, 2012). High-performance
computing and sensors-based technology have the potential to establish HTPPs. Time-lapse
EMI surveys system developed in Chapter 2 can be used for field phenotyping of various plants'
root water uptake rapidly and cost-effectively.
The plastic buggy system based on EMI surveys was successfully applied to monitor water
extraction by various chickpea genotypes in Chapter 3. In this chapter, soil ECa was collected
at 0, 20, 40, 60, and 80 cm heights in static recording mode in 2018 (I5A field) and at 0, 20,
and 80 cm heights in automatic recording mode in 2019 (Campey-1) using the plastic buggy
system equipped with EM38MK-2 to measure soil water extraction dynamics at different depth
of soil.
Based on the treatments applied to the plots, k-means cluster analysis of soil moisture
extraction time series at different depths effectively separated 36 chickpea genotypes into
various groups. The analysis allows monitoring the dynamics of soil water extraction behaviour
of different genotypes. Water extraction at pre-podding stages varies within the irrigated and
rainfed plots. From these analyses, it was observed that chickpea genotypes from the rainfed
plots had the least water use efficiency compared to the genotypes in the irrigated plots. The
system can efficiently monitor water extraction, as seen by changes in soil moisture within 60
– 80 cm depth. The least efficient water-use chickpea genotypes extract more water from the
surface soil during the maturity stage, which agrees with the assumption by Hurd (1974) and
Tanner (1983).
In Campey-1 (2019) cropping field, 192 chickpea genotypes were clustered using optimised
heights of measurements (0, 20, and 80 cm) in continuous recording mode. ΔS depth profile
indicates most soil waters were extracted at a depth deeper than 1 m. The distribution of total

Chapter 7: Concluding Remarks and Future Works
203
water uses of different groups of genotypes was analysed to find the most and least water-
efficient clusters. Temporal analysis of ∆S showed that at the mature stage, more soil water
was extracted from the bottom three layers (0-30 cm, 30-60 cm, and 60-100 cm) for both most
and least water-efficient genotypes of chickpeas. Overall, continuous ECa measurements at
three different heights using a plastic buggy system was efficiently used to monitor chickpea
plants' soil water extraction dynamics at various depths.
7.1.3 VisNIR penetrometer system for predicting SOC
SOC directly influences soil physical, chemical, and biological properties (Killham & Staddon
2002; Kibblewhite, Ritz, & Swift, 2008; Power, 2010). Plants captured the CO2 from the
atmosphere during photosynthesis processes and cycled through the soil organic matter.
Different organisms use these organic matters to source energy and nutrients (Lescure et al.,
2016). Higher SOC increases energy supply for all microorganisms (microbes, macrofauna,
earthworms, etc.) and nutrient supply to the plants (Metcalfe & Bui, 2017). It also helps
aggregate soil particles and increases soil structure stability, which improves the water storage
capacity (Carter, 2004). SOC stabilises the thermal properties of soil and maintains pH
buffering (Metcalfe & Bui, 2017).
In addition, soil carbon sequestration takes carbons from roots, stems, and leaf materials of
pasture grasses and crops and store them in the soil (Irving, 2015). Carbon farming benefits
landowners by maximising profit while increasing crop yield (Gerrand et al., 2003). The
Australian government has recently placed soil carbon as one of the low emission technology.
However, a significant hindrance to soil carbon farming payment development is the high cost
of soil carbon measurement in the field.
Conventional methods for soil organic carbon measurement in the laboratory are time-
consuming, expensive, and destructive in nature. A rapid and accurate SOC measurement

Chapter 7: Concluding Remarks and Future Works
204
technique with high-resolution becomes essential to calculate soil organic carbon stock.
VisNIR spectroscopy has been found to be a rapid, efficient, and cost-effective method for
measuring SOC. However, its use for measurement in the field down to 1 m of the soil profile
is still limited. In this study, a VisNIR penetrometer system was introduced and tested for
estimating SOC levels using an existing spectral library. The system works by inserting VisNIR
penetrometer ~2 cm increments in the first 30 cm depth and then by ~5 cm increments to the
maximum reading depth of 85 cm using a hydraulic system. There was 10 seconds pause
between each insertion events to capture high-quality spectra over the 350-2,500 nm
wavelength. To minimise the effect of soil moisture from the NIR signal, a method called the
EPO (external parameter orthogonolisation) was used to project the field measured NIR signal
to spectra that are insensitive to soil water content changes yet still contain information useful
for SOC prediction. The predicted OC contents from penetrometer using EPO transformed
VisNIR spectra were validated against the 33 homogenised samples of OC tested in the
laboratory. A slight over-prediction can be observed in the OC contents predicted from the
penetrometer system along with the total depth profile. The site with higher clay content (site
2) seems to have the most standard deviations at various depths between the predicted
(penetrometer system) and actual (laboratory measurement) OC contents. The higher
proportion of plant roots within the top 10 cm of the soil layer causes significant over-
prediction in SOC stocks in most experimental sites.
7.1.4 Automated hydrometer method for soil particle size analysis
The particle size distribution of soil is a function of soil physical properties such as water
retention, hydraulic conductivity, erosion potential, etc. (Kettler et al., 2001). It is also one of
the key parameters for evaluating agricultural management practices, plant nutrient storage
capacity, and carbon-sequestration potential (Chen et al., 2018; Eynard, Schumacher,
Lindstrom, & Malo, 2005; C. Li et al., 2017; Sarker et al., 2018).

Chapter 7: Concluding Remarks and Future Works
205
The hydrometer method for soil particle size analysis is one of the most commonly used
techniques for soil particle analysis, but it is tedious and involves a greater chance of human
errors. Also, it is practically difficult to obtain continuous particle size distribution graphs using
a hydrometer. Continuous particle size distribution is essential for comparing or sharing soil
textural information globally as the silt-sand thresholds are different in soil classification
systems in different countries. To minimise the conventional hydrometer method's issues, a
new automated, cheap, and simple method for evaluating soil particle-size distribution was
introduced in Chapter 5. A ToF distance sensor and digital temperature sensor was used to
record hydrometer reading and suspension temperature every 5 seconds. This automated
hydrometer technique will produce a continuous particle size distribution curve with
continuous measurements. In addition, the suspension temperature was also monitored to
calculate the viscosity more precisely. This system was tested with ten different soil samples
and compared the particle size analysis using the pipette method. A particle-size distribution
curve covering the 2-40 μm range was generated within 8 hours by observing soil particle
sedimentation using the automated hydrometer method. An additional cost of only $70 USD
potentially upgraded the conventional hydrometer technique for automatic continuous particle
size distribution more efficiently with higher accuracy.
7.1.5 Bulk Density and Soil Stiffness Moduli from Shear Wave Velocity
Bulk density of soil directly relates to soil physical quality and indicates the degree of soil
compaction (Letey, 1958; McNabb, Startsev, & Nguyen, 2001). Soil compaction negatively
affects the rate of seed germination and root penetrability (Lipiec et al., 2003; Nosalewicz &
Lipiec, 2014).
Conventional gravimetric methods such as core, clod, and excavation techniques are the direct
methods for measuring soil density. Due to the destructive nature of the tests, it is hard to

Chapter 7: Concluding Remarks and Future Works
206
collect an undisturbed soil sample from the field. The compression during the soil sampling
can cause an error in the measurements of bulk density. Gamma-ray absorption techniques are
more accurate, but these gauges are expensive and a potential health hazard. Measuring soil
stiffness moduli in the laboratory using conventional techniques are costly, and it is hard to
measure within the strain level below 10-3 %.
So, there is a necessity to develop a new technique for evaluating soil density and stiffness with
appropriate precision and accuracy. Chapter 6 explains the potential of shear wave velocity
(𝑉𝑉𝑆𝑆) measurements using the piezo-electric sensor for estimating soil density and stiffness
moduli cost-effectively. A low-cost sensing system that includes piezo bender and extender
elements with BitScope Micro Oscilloscope was used to automatically generate, receive, and
analyse shear wave velocity to calculate soil density and stiffness moduli. 𝑉𝑉𝑆𝑆 produced and
analysed using the proposed piezo-electric sensors, found to have a strong relationship with
soil density (R2 = 0.77 to 0.86) and stiffness moduli (R2 = 0.96 to 0.97). The piezo-electric
sensor system can potentially measure soil density and stiffness moduli rapidly, cost-
effectively, and conveniently.
7.2 General conclusions and future directions
All of the research chapters in the thesis have demonstrated different applications of cost-
effective sensing technology for predicting the physical properties of soil rapidly and
conveniently. These proposed systems need to experiment with various soils and conditions
from other locations around Australia. However, there is room for further studies on these
measurement techniques in the future, as described here:
EMI survey-based soil moisture monitoring
In Chapter 2, an EMI survey-based plastic buggy system was introduced for monitoring soil
moisture at the plot scale using a multi-layer inversion technique. In the future, the EMI surveys

Chapter 7: Concluding Remarks and Future Works
207
can be conducted in automatic mode to record continuous ECa measurements instead of point
measurements. Also, EMI surveys at 0, 20, and 80 cm heights can be used instead of five
different heights for the multi-layer inversion to minimise the time and labour required for
recording ECa measurements across the whole cropping field. This technique has the potential
to completely automate the EMI survey procedure using autonomous tractors. Aerial drones
can also be used for this purpose, but more researches are required to mitigate the
electromagnetic effect from the rotors and other metals on ECa measurements. This experiment
was only conducted on chickpea cropping trials, so in the future, this system needs to be tested
for other crops such as wheat, cotton, canola trials, etc.
Temporal depth-specific crop water analysis
Chapter 3 demonstrated the potential use of the proposed EMI survey technique introduced in
Chapter 2 for depth-specific temporal analysis of soil moisture at the plot level. It is essential
to validate this technique for different soil types and conditions in the future to check the
robustness of the proposed in-situ method for monitoring soil moisture. Plant physiologists and
breeders can use this system to conduct further studies to investigate the plant root zone
activities by various plant genotypes. Detailed soil moisture monitoring at multiple depths
using this EMI survey system, drought and heat tolerance by plants can be studied more
conveniently and precisely using this technique. Also, the potential of this technique can be
tested for root phenotyping to rank genotypes.
VisNIR penetrometer system
Chapter 4 presents a new VisNIR penetrometer system with an ultrasonic depth sensor for
predicting SOC using high-resolution EPO transformed in-situ spectra. In the future, the
proposed VisNIR probe system can be tested in various locations around Australia for other
types of soils. It was still difficult to push into the dry clay soils such as the vertosols. To resolve

Chapter 7: Concluding Remarks and Future Works
208
this issue, a smaller diameter soil core than the diameter of the penetrometer can be extracted
from the sites before the penetrometer's insertion. It will allow pushing the penetrometer in
easily at the desired depth. More studies need to be conducted to reduce plant roots' effect in
the VisNIR spectra. The reason for OC content over-prediction using this penetrometer system
need to investigate, and further studies will be required to fix this issue. A spectral library based
on the proposed penetrometer system can be developed to check the possibility of increasing
OC prediction accuracy using VisNIR penetrometer spectral library-based calibration. A force
transducer can also be incorporated in the penetrometer to allow readings of mechanical
strength, which can be used to estimate soil bulk density.
Automated hydrometer method
Chapter 5 of this thesis includes an automated hydrometer method for soil particle size analysis
using a ToF distance sensor and a digital temperature sensor to record the hydrometer readings
with temperature automatically. This automated hydrometer system can be tested with other
types of soil from different locations around Australia to check the efficiency and the
robustness of the proposed approach. To transfer the recorded data wirelessly, a Bluetooth or
Wifi based hardware can be added to the system. This automated hydrometer system has the
potential to program for calculating the percentages of various soil components such as sands,
silts, and clays with the continuous particle-size distribution curve covering the 2-40 μm range.
In the future, an android or IOS app can be developed to operate the system and to obtain the
particle sizes and continuous particle-size distribution curve directly on mobile devices. Also,
the hydrometer readings with the solution temperature at every five seconds can be stored on a
cloud server so that the data can be remotely accessed for further analysis.
Piezoelectric sensors-based shear wave velocity

Chapter 7: Concluding Remarks and Future Works
209
In Chapter 6, a new technique was introduced for measuring bulk density and soil stiffness
moduli from shear wave velocity using piezo-electric sensors. This system needs to be
experimented with various types of soils to predict bulk densities and soil moduli in the
laboratory. A probe system can be developed based on the piezo-electric sensors in the future
to measure the shear wave velocity of soil directly in the field. This system can also be added
with the penetrometer system, such as the VisNIR penetrometer, to collect additional soil
information from a single insertion. It can be a potential solution for determining many other
strength properties and soil moduli in situ. It can be applied to measure different soil moduli.
The overall cost of the hardware required for this experiment can be minimised by replacing
with cheaper locally produced hardware. Furthermore, Bluetooth or Wifi adapters can be added
to the hardware system for obtaining the recorded data wirelessly. This adaptation will also
allow to store and analyse the shear wave velocity data in the cloud server.
7.3 Closing statement
To conclude, cost-effective sensors have a significant potential to measure soil physical
properties rapidly, accurately using non-destructive techniques in the field. These technologies
can effectively monitor horizontal and vertical variability in space and time. Various
experiments with each technique show reproducibility and repeatability of these methods for
predicting soil moisture, OC content in the field, particle size distribution, bulk density, and
strength moduli in the laboratory. These cost-effective and robust measurement systems for
measuring 3-dimensional high-resolution soil physical properties can be used in precision
agriculture to optimise the resources for maximum crop yields.

Chapter 7: Concluding Remarks and Future Works
210
7.4 References
Ali, M. H., & Talukder, M. S. U. (2008). Increasing water productivity in crop production—a
synthesis. Agricultural Water Management, 95(11), 1201–1213.
Araus, J. L., & Cairns, J. E. (2014). Field high-throughput phenotyping: the new crop breeding
frontier. Trends in Plant Science, 19(1), 52–61.
Araus, J. L., Kefauver, S. C., Zaman-Allah, M., Olsen, M. S., & Cairns, J. E. (2018).
Translating high-throughput phenotyping into genetic gain. Trends in Plant Science,
23(5), 451–466.
Cabrera‐Bosquet, L., Crossa, J., von Zitzewitz, J., Serret, M. D., & Luis Araus, J. (2012). High‐
throughput phenotyping and genomic selection: The frontiers of crop breeding
converge F. Journal of Integrative Plant Biology, 54(5), 312–320.
Carter, M. R. (2004). Researching structural complexity in agricultural soils. Elsevier.
Chen, S., Martin, M. P., Saby, N. P. A., Walter, C., Angers, D. A., & Arrouays, D. (2018). Fine
resolution map of top-and subsoil carbon sequestration potential in France. Science of
the Total Environment, 630, 389–400.
Eynard, A., Schumacher, T. E., Lindstrom, M. J., & Malo, D. D. (2005). Effects of agricultural
management systems on soil organic carbon in aggregates of Ustolls and Usterts. Soil
and Tillage Research, 81(2), 253–263.
Gerrand, A., Keenan, R. J., Kanowski, P., & Stanton, R. (2003). Australian forest plantations:
an overview of industry, environmental and community issues and benefits.
Australian Forestry, 66(1), 1–8.
Hurd, E. A. (1974). Phenotype and drought tolerance in wheat. Agricultural Meteorology,
14(1–2), 39–55.

Chapter 7: Concluding Remarks and Future Works
211
Irving, L. J. (2015). Carbon assimilation, biomass partitioning and productivity in grasses.
Agriculture, 5(4), 1116–1134.
Kettler, T. A., Doran, J. W., & Gilbert, T. L. (2001). Simplified method for soil particle-size
determination to accompany soil-quality analyses. Soil Science Society of America
Journal, 65(3), 849–852.
Kibblewhite, M. G., Ritz, K., & Swift, M. J. (2008). Soil health in agricultural systems.
Philosophical Transactions of the Royal Society B: Biological Sciences, 363(1492),
685–701.
Killham, K., & Staddon, W. J. (2002). Bioindicators and sensors of soil health and the
application of geostatistics. Enzymes in the Environment. Marcel Dekkerr, NY, USA,
391–405.
Lescure, T., Moreau, J., Charles, C., Saanda, T. B. A., Thouin, H., Pillas, N., Bauda, P., Lamy,
I., & Battaglia-Brunet, F. (2016). Influence of organic matters on AsIII oxidation by
the microflora of polluted soils. Environmental Geochemistry and Health, 38(3), 911–
925.
Letey, J. (1958). Relationship between soil physical properties and crop production. In
Advances in soil science (pp. 277–294). Springer.
Li, C., Fultz, L. M., Moore-Kucera, J., Acosta-Martínez, V., Horita, J., Strauss, R., Zak, J.,
Calderón, F., & Weindorf, D. (2017). Soil carbon sequestration potential in semi-arid
grasslands in the Conservation Reserve Program. Geoderma, 294, 80–90.
Lipiec, J., Medvedev, V. V, Birkas, M., Dumitru, E., Lyndina, T. E., Rousseva, S., & Fulajtar,
E. (2003). Effect of soil compaction on root growth and crop yield in Central and
Eastern Europe. International Agrophysics, 17(2).
McNabb, D. H., Startsev, A. D., & Nguyen, H. (2001). Soil wetness and traffic level effects on

Chapter 7: Concluding Remarks and Future Works
212
bulk density and air‐filled porosity of compacted boreal forest soils. Soil Science
Society of America Journal, 65(4), 1238–1247.
Metcalfe, D. J., & Bui, E. N. (2017). Australia state of the environment 2016: land, independent
report to the Australian Government minister for the environment and energy.
Australian Government Department of the Environment and Energy, Canberra, Doi,
10, 94.
Nosalewicz, A., & Lipiec, J. (2014). The effect of compacted soil layers on vertical root
distribution and water uptake by wheat. Plant and Soil, 375(1–2), 229–240.
Richards, R. A. (1991). Crop improvement for temperate Australia: future opportunities. Field
Crops Research, 26(2), 141–169.
Roitsch, T., Cabrera-Bosquet, L., Fournier, A., Ghamkhar, K., Jiménez-Berni, J., Pinto, F., &
Ober, E. S. (2019). New sensors and data-driven approaches—A path to next
generation phenomics. Plant Science, 282, 2–10.
Sarker, J. R., Singh, B. P., Dougherty, W. J., Fang, Y., Badgery, W., Hoyle, F. C., Dalal, R. C.,
& Cowie, A. L. (2018). Impact of agricultural management practices on the nutrient
supply potential of soil organic matter under long-term farming systems. Soil and
Tillage Research, 175, 71–81.
Tanner, C. B., & Sinclair, T. R. (1983). Efficient water use in crop production: Research or re‐
search? Limitations to Efficient Water Use in Crop Production, 1–27.