Embed Size (px)
DESCRIPTION
Method of Characteristics and Numerical Solutions for the Supersonic External Ballistics
Citation preview

Method of Characteristics and Numerical Solutions for the
Supersonic External Ballistics Problem
by
Keith D. Smith
A Thesis Submitted to the Graduate
Faculty of Rensselaer Polytechnic Institute
in Partial Fulfillment of the
Requirements for the degree of
MASTER OF ENGINEERING
2nd
Complete Draft
17 July 09
Approved:
_________________________________________
Dr. David Tew, Thesis Adviser
_________________________________________
Dr. Ernesto Gutierrez-Miravete, Thesis Adviser
Rensselaer Polytechnic Institute
Troy, New York
August 2009
1
© Copyright 2009
by
Keith D. Smith
All Rights Reserved
2
CONTENTS
LIST OF TABLES............................................................................................................. 4
LIST OF FIGURES ........................................................................................................... 5
NOMENCLATURE .......................................................................................................... 6
ACKNOWLEDGMENT ................................................................................................... 8
ABSTRACT ...................................................................................................................... 9
1. Introduction................................................................................................................ 10
1.1 General External Ballistics............................................................................... 11
1.1.1 Projectile Features................................................................................ 11
1.1.2 Flight Speeds........................................................................................ 14
1.2 Problem Definition........................................................................................... 15
1.2.1 Description ........................................................................................... 15
1.2.2 Assumptions......................................................................................... 17
1.3 Governing Equations........................................................................................ 18
1.3.1 Conservation of Mass........................................................................... 18
1.3.2 Conservation of Momentum ................................................................ 19
1.3.3 Conservation of Energy........................................................................ 20
1.3.4 Method of Characteristics Velocity Potential Form ............................ 21
1.3.5 Finite Volume Numerical Method Form ............................................. 21
2. Methodology.............................................................................................................. 22
2.1 Reynolds Number ............................................................................................ 22
2.2 Method of Characteristics ................................................................................ 23
2.2.1 Process.. ............................................................................................... 23
2.2.2 Equations.............................................................................................. 28
2.3 Numerical Method ........................................................................................... 30
2.3.1 Mesh Generation .................................................................................. 31
2.3.2 Fluent® Implementation ...................................................................... 34
3
3. Results and Discussion .............................................................................................. 39
3.1 Experimental Illustration.................................................................................. 39
3.2 Quantitative Comparisons................................................................................ 41
3.3 Qualitative Comparisons.................................................................................. 48
3.3.1 Coarse Mesh......................................................................................... 48
3.3.2 Medium Mesh ...................................................................................... 51
3.3.3 Fine Mesh............................................................................................. 54
3.3.4 Drag Coefficient................................................................................... 58
4. Conclusions................................................................................................................ 60
5. Areas for Future Work............................................................................................... 62
6. References.................................................................................................................. 63

4
LIST OF TABLES
Table 1-1: Representative Projectile Muzzle Velocities ................................................. 15
Table 2-1: Mesh Grid Summary ...................................................................................... 33
Table 3-1: Minimum Mach number Comparison............................................................ 44
Table 3-2: Drag Coefficient Comparison ........................................................................ 59
5
LIST OF FIGURES
Figure 1-1: General Projectile Features ........................................................................... 11
Figure 1-2: Base Drag Force Reduction Features Overview........................................... 13
Figure 1-3: NACA No. 24 Projectile Dimensions........................................................... 16
Figure 2-1: Method of Characteristics Physical Plane .................................................... 23
Figure 2-2: Location of the Shock Front ......................................................................... 24
Figure 2-3: Partition of the Physical Plane ...................................................................... 25
Figure 2-4: Characteristic Net and Intersection Points.................................................... 27
Figure 2-5: Physical Plane Mesh ..................................................................................... 32
Figure 2-6: Coarse Mesh Grid ......................................................................................... 33
Figure 3-1: Schlieren Illustration for a NACA 1122 No. 32 Shape (w/Boat Tail).......... 40
Figure 3-2: Verification of Shock Attachment ................................................................ 42
Figure 3-3: Mach number Comparison Immediately Downstream of Shock Front ........ 43
Figure 3-4: Projectile Surface Mach number Comparison .............................................. 45
Figure 3-5: Method of Characteristics Projectile Surface Pressure Ratio ....................... 46
Figure 3-6: Numerical Model Pressure Ratio .................................................................. 47
Figure 3-7: Coarse Mesh Static Mach number Contour Map.......................................... 49
Figure 3-8: Coarse Mesh Mach number Surface Map..................................................... 49
Figure 3-9: Coarse Mesh Pressure Contour Map ............................................................ 50
Figure 3-10: Coarse Mesh Pressure Surface Map ........................................................... 51
Figure 3-11: Medium Mesh Mach number Contour Map ............................................... 52
Figure 3-12: Medium Mesh Mach number Surface Map ................................................ 52
Figure 3-13: Medium Mesh Static Pressure Contour Map.............................................. 53
Figure 3-14: Medium Mesh Static Pressure Surface Map............................................... 54
Figure 3-15: Fine Mesh Mach number Contour Map...................................................... 55
Figure 3-16: Fine Mesh Velocity Surface Map ............................................................... 55
Figure 3-17: Fine Mesh Static Pressure Contour Map .................................................... 56
Figure 3-18: Fine Mesh Static Pressure Surface Map ..................................................... 57
Figure 3-19: Shock Attachment to the Projectile Nose, Mach number........................... 57
Figure 3-20: Shock Attachment to the Projectile Nose, Static Pressure.......................... 58
6
NOMENCLATURE
ρ - fluid density
t - time
u - velocity vector (u = ux î + ur ĵ)
r - r-coordinate distance
x - x-coordinate distance
Sm - fluid mass source term (for combustion)
g - gravitational vector (constant)
p - static pressure
p0 - total or stagnation pressure
F - external force vector
Et - total energy
hj - diffusion energy term (see Fluent®)
Jj - diffusion energy term (see Fluent®)
Sh - volumetric energy source term (for chemical reactions)
Φ - velocity potential function
a - sound speed
V - volume
A - area
H - enthalpy
τxi - viscous term
τri - viscous term
τij - viscous term
q - heat flux
Re - Reynolds number
l0 - characteristic length
v0 - characteristic velocity
µ0 - fluid viscosity
θ - turn angle
θnose - projectile nose tangent angle

7
NOMENCLATURE
θshock - shock front angle
θfan - projectile base forward expansion fan Mach line angle
α - flight angle of attack
µ - Mach angle
β - local Mach angle
ν - Prandtl-Meyer angle
γ - fluid specific heat ratio
Cd - drag coefficient

8
ACKNOWLEDGMENT

9
ABSTRACT
The external ballistics problem has been studied for several decades in an effort to
improve flight range or optimize projectiles for a given mission scenario. This paper
considers the specific problem of unpowered supersonic flight of a simple axi-symmetric
shape such as a bullet or artillery shell. The objective is to compare two calculation
methods that offer an Euler solution to the velocity and pressure field characteristics near
the projectile. The problem is simplified to inviscid steady-state conditions.
An analytic solution is obtained using the Method of Characteristics (MoC) ap-
proach that encompasses the Euler equations in a single second order differential
equation using the velocity potential function. The second solution is provided by a
finite volume numerical method that solves the Euler equations in coupled vector form.
The comparisons show that both methods capture the shape and oblique angle char-
acteristics of the projectile nose shock. However, the MoC solutions do not indicate
vorticity across the shock due to the application of additional isentropic fluid assump-
tions. The numerical solutions included vorticity as indicated by the curvature of the
shock front, but did not adequately represent the fluid gradients across the shock front
for the three mesh densities that were evaluated. Though it was not the principal focus of
this paper, the numerical solutions also provided a drag coefficient that was only 4%
lower than previously reported experimental data even though viscous effects were
neglected.

10
1. Introduction
The external ballistics problem has been studied for several decades in an effort to
improve flight range or optimize projectiles for a given mission scenario. This paper
considers the specific problem of unpowered supersonic flight of a simple axi-symmetric
shape such as a bullet or artillery shell. The objective is to compare two calculation
methods that offer an Euler solution to the velocity and pressure field characteristics near
the projectile. The problem is simplified to inviscid steady-state conditions. The topic
was chosen based on an introduction to the subject presented in Anderson [1].
An analytic solution is obtained using the Method of Characteristics (MoC) ap-
proach that encompasses the Euler equations in a single second order differential
equation using the velocity potential function. The second solution is provided by a
finite volume numerical method that solves the Euler equations in coupled vector form.
Both methods solve Euler’s equations for continuity (conservation of mass), conserva-
tion of momentum and conservation of energy assuming inviscid flow.
Supersonic projectile motion has been extensively studied in a variety of applica-
tions ranging from small arms and artillery projectiles to missiles and manned
supersonic aircraft. The flow fields around the projectile are a function of the fluid
thermodynamic properties, its flight speed and shape. The ability to accurately quantify
the fluid behavior near a projectile in flight is important for determining the flight
characteristics. High velocity and pressure gradients will occur near shock or expansion
(sometimes called rarefaction) waves affecting flight characteristics such as drag force,
lift force or projectile center of pressure. In many applications, lower drag force is
sought to enable higher projectile speeds, increased range, improved propulsion effi-
ciency or an optimized design for a given mission.
This paper examines characteristics of the fluid velocity and pressure field for a spe-
cific external ballistics case of a simple axi-symmetric projectile. The problem is
restricted to the scale of small arms or artillery scale projectiles. Characteristics of
interest include the position and strength of shock fronts, the formation of expansion
regions (or rarefaction waves), Mach angle at the projectile base, and the Mach speed at
the surface of the projectile. Flow characteristics occurring in the wake downstream of
the projectile base are not included in this study.
11
The following sections provide a general introduction to external ballistics problems
including terminology used to describe features and flight speeds. The general discus-
sion is followed by a detailed description of the topic problem and governing equations.
The methodology, results and conclusions are presented in later sections.
1.1 General External Ballistics
1.1.1 Projectile Features
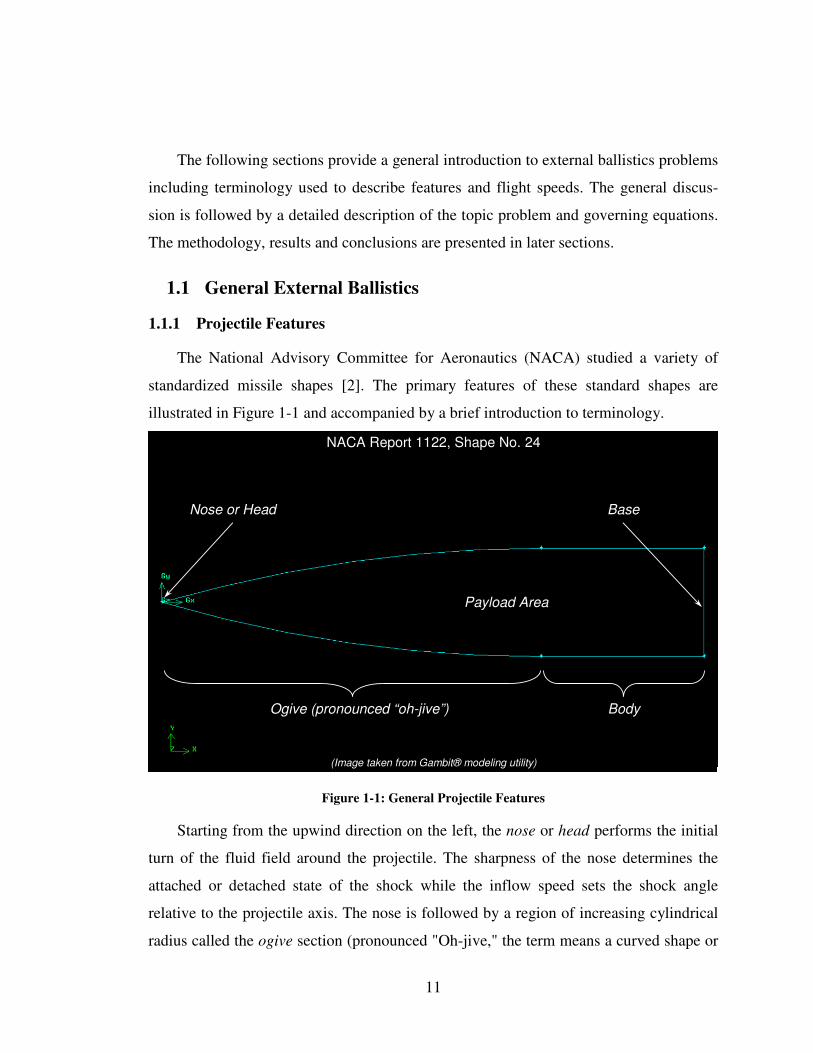
The National Advisory Committee for Aeronautics (NACA) studied a variety of
standardized missile shapes [2]. The primary features of these standard shapes are
illustrated in Figure 1-1 and accompanied by a brief introduction to terminology.
NACA Report 1122, Shape No. 24
Payload Area
Nose or Head
Ogive (pronounced “oh-jive”) Body
Base
(Image taken from Gambit® modeling utility)
Figure 1-1: General Projectile Features
Starting from the upwind direction on the left, the nose or head performs the initial
turn of the fluid field around the projectile. The sharpness of the nose determines the
attached or detached state of the shock while the inflow speed sets the shock angle
relative to the projectile axis. The nose is followed by a region of increasing cylindrical
radius called the ogive section (pronounced "Oh-jive," the term means a curved shape or

12
feature). The ogive can be conical appearing as a triangle in cross-section or it may be
represented by a conic section such as a circular, parabolic or elliptic arc. A tangent
ogive shape is simply any ogive shape that is tangent to the body cylinder at the intersec-
tion point. Simple axi-symmetric ogive shapes are often chosen for mass produced
projectiles such as bullets or model rockets whereas semi axi-symmetric shapes may be
preferred for larger scale objects such as fighter aircraft where cost is less of a considera-
tion.
The cylindrical section following the ogive is called the projectile body. The size of
the body has a significant affect on the projectile’s payload, center of gravity and the
development of a turbulent boundary layer. For ballistic shapes, the maximum diameter
of the body section is used as a reference dimension for all other projectile dimensions
and is expressed in caliber (measured in inches) or millimeters. By convention, the
decimal place is omitted from non-metric caliber sizes less than one inch (eg. 0.30 inch
diameter is denoted 30 caliber)
The projectile base is the circular area at the trailing end of the projectile. Its size
and shape determines the base drag force acting on the projectile. Base drag is the
dominant contributor to overall projectile drag force [5]. Three base examples are shown
in Figure 1-2.

13
Simple Base
Boat Tail
Boat Tail (7.5°to Axis)
Recessed Base Boat Tail
Figure 1-2: Base Drag Force Reduction Features Overview
The least complex base is represented by a flat circular area exhibiting the same di-
ameter at the projectile body. A tapered body section called a boat tail is employed in
some projectile designs to reduce base drag force. A boat tail angle between 6 and 9
degrees is considered optimum for a practical range of supersonic flight speeds [3].
Some projectiles implement both a boat tail and a hollow base to further reduce base
drag force [4]. The boat tails is detrimental to muzzle velocity because it provides an
efficient aerodynamic shape for high pressure fluid to flow around the projectile during
the transition from internal to external ballistic flight when the bullet leaves the gun
barrel. Some small arms projectiles further modify the boat tail to produce a step be-
tween the body and boat tail mitigating this effect. The stepped design is called a rebated
boat tail (not shown).
The overall projectile length affects flight stability and formation of the turbulent
boundary layer [2]. Flight stability refers to the steady orientation of the projectile
relative to its direction of travel. Further discussion of flight stability and turbulence are
beyond the scope of this study though extensive discussion is available in open litera-
ture.
14
1.1.2 Flight Speeds
In general, the speed of a projectile varies throughout its flight path or trajectory.
For unpowered projectiles, the rate of deceleration is inversely proportional to the cross-
sectional loading (the ratio of projectile weight to cross-sectional area) and directly
proportional to the drag coefficient [2]. By convention, the barrel exit or muzzle velocity
is used to represent the kinetic energy or initial speed regime for small arms and artillery
projectiles. Representative small arms muzzle velocities can range from Mach 1.2 to
Mach 3.7 for conventional projectiles, and may remain supersonic at practical ranges
(~200 yards) exhibiting speeds up to Mach 2.7 [7] [8]. Armor piercing and other spe-
cialty projectiles may achieve higher muzzle velocities [9]. A small sample of
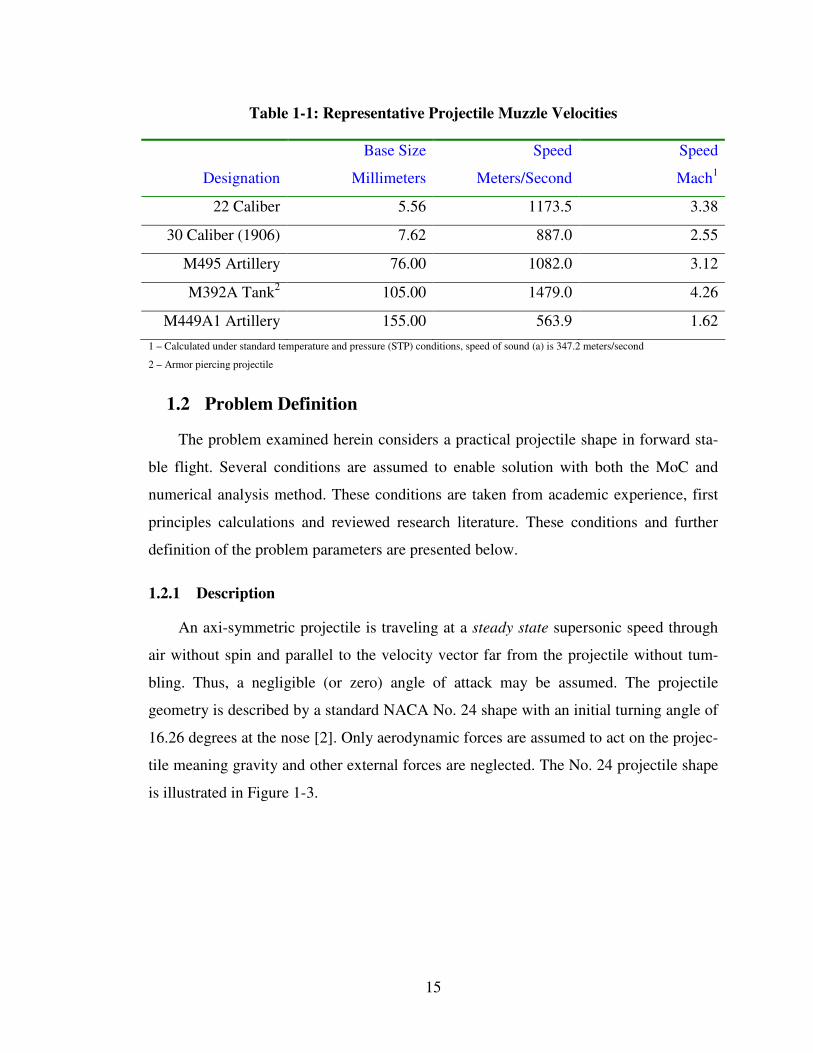
representative small arms and artillery projectiles is presented in Table 1-1. The table
lists sizes expressed in base diameter (millimeters) and muzzle velocities from various
sources [7] [8] [9].
15
Table 1-1: Representative Projectile Muzzle Velocities
Designation
Base Size
Millimeters
Speed
Meters/Second
Speed
Mach1
22 Caliber 5.56 1173.5 3.38
30 Caliber (1906) 7.62 887.0 2.55
M495 Artillery 76.00 1082.0 3.12
M392A Tank2 105.00 1479.0 4.26
M449A1 Artillery 155.00 563.9 1.62
1 – Calculated under standard temperature and pressure (STP) conditions, speed of sound (a) is 347.2 meters/second
2 – Armor piercing projectile
1.2 Problem Definition
The problem examined herein considers a practical projectile shape in forward sta-
ble flight. Several conditions are assumed to enable solution with both the MoC and
numerical analysis method. These conditions are taken from academic experience, first
principles calculations and reviewed research literature. These conditions and further
definition of the problem parameters are presented below.
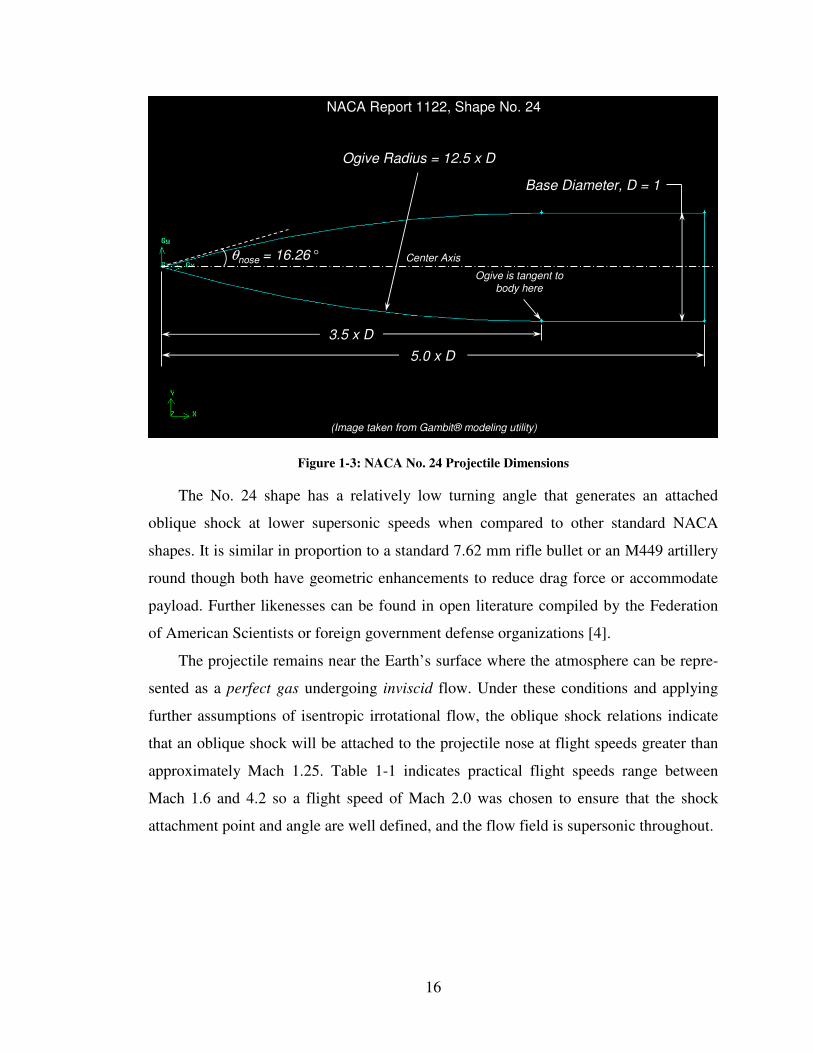
1.2.1 Description
An axi-symmetric projectile is traveling at a steady state supersonic speed through
air without spin and parallel to the velocity vector far from the projectile without tum-
bling. Thus, a negligible (or zero) angle of attack may be assumed. The projectile
geometry is described by a standard NACA No. 24 shape with an initial turning angle of
16.26 degrees at the nose [2]. Only aerodynamic forces are assumed to act on the projec-
tile meaning gravity and other external forces are neglected. The No. 24 projectile shape
is illustrated in Figure 1-3.
16
NACA Report 1122, Shape No. 24
Ogive Radius = 12.5 x D
Base Diameter, D = 1
(Image taken from Gambit® modeling utility)
3.5 x D
5.0 x D
Ogive is tangent to body here
Center Axisθnose = 16.26°
Figure 1-3: NACA No. 24 Projectile Dimensions
The No. 24 shape has a relatively low turning angle that generates an attached
oblique shock at lower supersonic speeds when compared to other standard NACA
shapes. It is similar in proportion to a standard 7.62 mm rifle bullet or an M449 artillery
round though both have geometric enhancements to reduce drag force or accommodate
payload. Further likenesses can be found in open literature compiled by the Federation
of American Scientists or foreign government defense organizations [4].
The projectile remains near the Earth’s surface where the atmosphere can be repre-
sented as a perfect gas undergoing inviscid flow. Under these conditions and applying
further assumptions of isentropic irrotational flow, the oblique shock relations indicate
that an oblique shock will be attached to the projectile nose at flight speeds greater than
approximately Mach 1.25. Table 1-1 indicates practical flight speeds range between
Mach 1.6 and 4.2 so a flight speed of Mach 2.0 was chosen to ensure that the shock
attachment point and angle are well defined, and the flow field is supersonic throughout.
17
1.2.2 Assumptions
Several assumptions are applied to simplify calculations. Some enable the applica-
tion of the Euler equations while others eliminate computational complexity as discussed
in section 1.3. The most significant assumptions are discussed briefly in the paragraphs
below.
Steady State Condition – The governing differential equations contains time varying
terms represented by the time derivatives. These mathematic terms add significant
computational complexity [6] that can be neglected under constant steady state condi-
tions. The projectile is defined to have achieved a constant speed so the mathematics of
the time derivatives can be neglected (set equal to zero).
Perfect gas – The physical complexity of intermolecular behavior becomes signifi-
cant under conditions of combustion, extreme heating where the gas may achieve plasma
state, or under rare atmospheric conditions high above the Earth. The problem definition
restricts flight trajectories to the vicinity of Earth’s surface so rare atmospheric condi-
tions are not a consideration for this problem. Likewise, extreme heating can be
neglected for moderate supersonic speeds, and combustion is not a factor for unpowered
projectiles. Therefore, perfect gas behavior is applied to eliminate the associated terms
from the governing equations.
Isentropic flow – The term isentropic refers to a reversible thermodynamic process
that occurs without gain or loss of heat and without a change in entropy. The speed of
sound in the fluid is constant throughout the flow field when isentropic flow is assumed.
The MoC uses an isentropic flow assumption to obtain a solution. The assumption is not
enforced for the numerical solution. Therefore, differences between MoC and numeri-
cally estimated Mach magnitude are anticipated.
Inviscid flow – Friction heat generation is an important consideration when the ob-
jective is to represent the turbulent boundary layer or base (recirculation) flow with
greater accuracy. Under these circumstances, a viscid Navier-Stokes solution approach
with an appropriate turbulence closure model provides the necessary computational
terms to predict pressure losses, secondary flows and regions of flow separation. The
inviscid flow assumption is applied to enable the Euler governing equation formulation
presented in section 1.3 and simplify the solution process.

18
Irrotational flow – Rotational flow introduces a fluid point property called vorticity.
Vorticity causes the flow to change direction and occurs in fluid regions where high
enthalpy or entropy gradients occur (ie. around shock waves). It is observed as shock
curvature. The MoC assumes irrotational flow to obtain an analytic solution so estimated
shock waves will be straight. The irrotational flow assumption is not enforced in the
numerical method so curved shock wave are anticipated for these solutions.
1.3 Governing Equations
There are a number of valid sets of equations for modeling external ballistic prob-
lems. The Euler equations have been selected for this study because they can be solved
with both MoC and numerical calculation methods, and encompass enough of the
physics to estimate the flow fields near the projectile. The Euler equations permit
rotational flow and enthalpy losses through shock waves, and are very useful in solving
transonic flow problems, propeller or rotor aerodynamics, and flows with vortical
structures in the field. However, none of these capabilities will be explored during
solution of this problem.
The following sections present the equations for conservation of mass, momentum
and energy and provide comparisons to the equation forms used for the MoC calcula-
tions and by the Fluent® software application. The governing equations originate from
Anderson (Chapter 8), Tannehill (section 5.5) and the Fluent® User’s Manual [1] [10]
[11]. The notation has been adjusted to allow clear and consistent comparisons.
1.3.1 Conservation of Mass
The conservation of mass or continuity equation is written as follows (equation 1.1):
( ) 0=⋅∇+∂
∂u
tρ
ρ
The first term accounts for time dependent density changes in the flow field and is
zero in this case since steady state flow is assumed. The remaining term can be ex-
pressed in two-dimensional cylindrical coordinates using the r-z plane as follows
(equation 1.2):
( ) ( ) 0=∂
∂++
∂
∂x
rr u
xr
uu
rρ
ρρ

19
Note that the coordinate x (rather than z) is taken as the direction along the cylinder
axis for consistency with Gambit® and Fluent® convention. The Fluent® solver uses a
general form of the continuity equation and includes a fluid source term as shown here
(equation 1.3):
( ) mSut
=⋅∇+∂
∂ρ
ρ
The fluid source term (Sm) can be applied to account for vaporization of liquid drop-
lets carried in the fluid media (e.g. water mist). For two-dimensional axi-symmetric
steady state flow, Fluent® solves the continuity equation in the form (equation 1.4):
( ) ( ) mxr
r Suxr
uu
r=
∂
∂++
∂
∂ρ
ρρ
Note the Fluent® continuity equation (1.4) reduces to the standard form (1.2) when
the source term is zero.
1.3.2 Conservation of Momentum
The conservation of momentum equation is written as follows (equation 1.5):
pgDt
uD∇−=
rr
ρρ
Equation 1.5 was derived by Euler in 1755 and is the original Euler equation. The
left had term is the product of density and the substantial derivative of the velocity
vector with respect to time. The first term on the right hand side describes the body force
acting of the fluid due to gravity. This term is set to zero in this case since body forces
are neglected. The remaining terms can be expressed in two-dimensional cylindrical
coordinates by expanding the substantial derivative and writing the results for r and x
separately (equation 1.6(a) and 1.6(b)):
r
p
x
uu
r
uu
t
u rx
rr
r
∂
∂−=
∂
∂+
∂
∂+
∂
∂ρ
x
p
x
uu
r
uu
t
u xx
xr
x
∂
∂−=
∂
∂+
∂
∂+
∂
∂ρ
The time derivatives are set to zero using the steady state assumption. The Fluent®
solver uses a general form of the momentum equation that includes both body force (eg.
gravity) and external force terms as shown below (equation 1.7):

20
( ) ( ) Fpguuut
rrrrr+∇−=⋅∇+
∂
∂ρρρ
The external force vector (F) on the right hand side is included to account for fluid
interaction from dispersed phases or other user-defined sources. The body and external
forces are set to zero based on the assumed conditions for this problem.
For two-dimensional axi-symmetric steady state flow, Fluent® solves the momen-
tum equation in the following form (equation 1.8(a) and 1.8(b)):
( ) ( )r
puru
xruru
rrrxrr
∂
∂−=
∂
∂+
∂
∂ρρ
11
( ) ( )x
puru
xruru
rrxxxr
∂
∂−=
∂
∂+
∂
∂ρρ
11
The Fluent® momentum equations above can be simplified to the standard form
(equation 1.6) by neglecting external forces.
1.3.3 Conservation of Energy
The reduced energy equation neglects viscous terms and external forces (except
gravity) so that (equation 1.9):
( )upguEut
Et
trrrr
⋅∇−⋅=
∇⋅+
∂
∂ρρ
Applying the steady state assumption, setting the gravitational body force term to
zero and combining terms on the left hand side yields (equation 1.10):
( )( ) 0=+⋅∇ pEu tρr
The Fluent® solver uses a similar generalized form of the energy equation with ad-
ditional source terms on the right hand side. The equation is (equation 1.11):
( ) ( )( ) h
j
jjtt SJhpEuEt
+
⋅−∇=+⋅∇+
∂
∂∑ρρ
r
The first term on the right represents diffusion energy sources associated with combus-
tion processes. The second right hand term is a volumetric source that may be used to
account for other chemical reactions, radiation or heat transfer from inter-phase mixing.
The Fluent® inviscid energy equation (1.11) reduces to the steady state equation (1.10)
when the time dependent and addition right hand side terms are neglected.

21
1.3.4 Method of Characteristics Velocity Potential Form
The governing equations can be re-written for irrotational flow in a single second
order differential form called the velocity potential equation. The MoC calculations are
derived from the two-dimensional velocity potential equation below (Equation 1.12):
021
11
12
22
22
22
22
2=
Φ
Φ
Φ−
Φ
Φ−+
Φ
Φ−
dxdr
d
dr
d
dx
d
adr
d
dr
d
adx
d
dx
d
a
The velocity potential function (Φ) represents the full velocity potential function
where the velocity vector terms are represented by the derivatives in following equations
(Equations 1.13(a), 1.13(b) and 1.13(c)):
xudx
d=
Φ ru
dr
d=
Φ
1.3.5 Finite Volume Numerical Method Form
The governing equations can be written in a finite volume integral conservation law
form using vector notation. The integral form is implemented in the Fluent® solver
scheme and presented below (equation 1.14):
[ ] ∫∫∫ =⋅−+∂
∂VVHdVdAGFWdV
t
The vectors are given in cylindrical coordinates below (equation 1.15):
=
t
x
r
E
u
urW
ρ
ρ
ρ
ρ
( )
+
+
+=
upE
xpuu
rpuu
u
F
t
x
r
r
r
r
r
ρ
ρ
ρ
ρ
ˆ
ˆ
+
=
qu
G
jij
xi
ri
τ
τ
τ
0
The right hand term is the total enthalpy and is related to the total energy of the sys-
tem [11]. The viscous (τ) and heat flux (q) terms are set equal to zero using the
assumptions in the problem definition so that the G-vector is zero.

22
2. Methodology
The external ballistics solution process has attributes that are common between the
MoC and numerical method. The two methods use a two dimensional axi-symmetric
plane encompassing one-half of the projectile section and adjacent fluid. Both methods
use a net or mesh of points to calculate the fluid quantities of interest. However, they
take different approaches for determining these points and the parameter values at each
point.
The following sections describe the MoC and numerical method solution process
that was applied for this study. A brief discussion of the problem Reynolds number is
presented first to provide additional insight into the applicability of the Euler equation
approach.
2.1 Reynolds Number
It is convenient to characterize fluid dynamics problems using Reynolds number to
estimate the relative importance of inertial and viscous forces in the fluid system. Inertial
and viscous forces may be neglected for high Reynolds numbers (typically taken as
>107) as was assumed in the discussion of the governing equations. The Reynolds
number (Re) equation is given below for clarity (Equation 2.1):
0
00Reµ
ρvl=
Two Reynolds number calculations are completed for this problem since the characteris-
tic length (l0) may be represented by the length of small arms or artillery projectiles. A
5.56 mm small arms projectile yields a Reynolds number greater than 106, and the
Reynolds number is greater than 107 for artillery rounds comparable to the M449A1
round listed in Table 1-1. These values indicate that viscous forces are small in both
cases and support the initial assumption of inviscid flow. The values also suggest that a
turbulent flow calculation approach is warranted. However, turbulent flow and associ-
ated field features are neglected in both calculation methods to reduce solution
complexity.
23
2.2 Method of Characteristics
The MoC is based on the velocity potential analytic method that reduces the govern-
ing second order differential equations to a first order form that have exact solutions
along specific curves called characteristic lines. Flow parameters such as velocity or
pressure are quantified at the intersections of these lines using compatibility equations,
the characteristic lines and the problem boundary conditions. The MoC has been applied
to compressible flow problems since the late 1920’s, and several different implementa-
tion approaches have been utilized [1] [12] [13] [14] [15]. Though the solutions are
mathematically exact, the implementation process introduces potential inaccuracies. The
following discussion outlines the process and equations used herein.
2.2.1 Process
The MoC calculations begin with a definition of the physical plane consisting of the
projectile and surrounding fluid volume. The physical plane is presented in Figure 2-1.
Figure 2-1: Method of Characteristics Physical Plane
24
The fluid volume is defined in terms of the projectile base diameter and employs to
reduce its scale. The axi-symmetric volume starts 5 diameters ahead of the projectile
nose, ends 30 diameters downstream of its base, and extends 20 diameters away from the
center axis. The region size was determined through examination of other research to
capture the entire shock or expansion flow disturbances near the projectile [3] [4] [6].
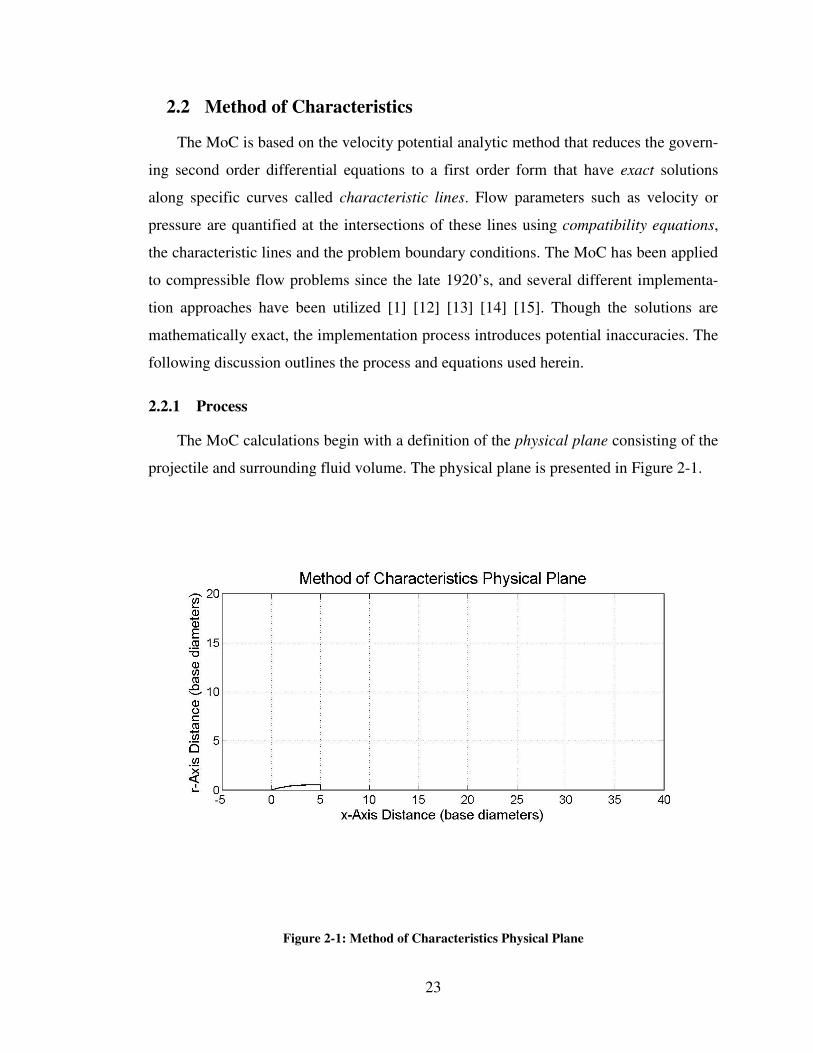
Once the physical plane is established, a calculation is performed to determine the
location of the shock front. The shock front is defined by the set of positive characteris-
tic line intersection points. The positive characteristic lines are determined for a set of
points parallel to and near the projectile axis in the inflow region upwind (to the left) of
the projectile, and lie on the projectile surface. The set of points and spacing is chosen to
ensure the fluid volume contains sufficient intersection points with negative characteris-
tic lines in later calculations. A partial set of positive characteristic lines and the
intersection points defining the shock front are shown in Figure 2-2.
Figure 2-2: Location of the Shock Front
25
The figure shows red circles at the positive characteristic line intersection points,
and indicates that the shock front can be represented as a straight line extending from the
projectile tip coordinates at a slope defined by the inflow boundary condition. Adjacent
characteristic lines diverge adjacent to the ogive section immediately downstream of the
shock front. This feature represents fluid expansion. The characteristic lines return to a
parallel condition where the ogive merges into the body section.
The characteristic line slope, r-intercept and a Mach number are calculated at the
point coordinates using the inflow boundary condition, turn angle (θ), characteristic line
slope and compatibility equations. The characteristic line slope and compatibility
equations are obtained from the governing equation presented in section 1.3.4, and
summarized in sections 2.2.2.1 and 2.2.2.2.
The shock front divides the physical plane into an inflow region (region 1) and a
downstream region behind the shock (region 2). The last positive characteristic line
located at the base of the projectile is a Mach line that defines the forward portion of the
base Mach line. This line is taken as a convenient surface to terminate the volume of
interest. Flow downstream of the base (region 3) is not evaluated with the MoC. The
three regions are annotated in Figure 2-3.
Shock and Expansion Fan Overview
Shock FrontMach Line
Expansion Fan
Forward Mach Line
θfan = 30.03°
θshock = 30.00°
Note: Accurate estimates could not be obtained from oblique shock relations due to shape complexity
1 2 3
Figure 2-3: Partition of the Physical Plane
26
The Mach lines in Figure 2-3 separate each region and extend to the limits of the
physical plane. The horizontal dotted line is shown for angle reference. The fluid field
Mach number and turn angles are calculated separately for regions 1 and 2. The calcula-
tions start in a manner similar to the calculations that were performed to locate the shock
front. Supporting equations are presented in Section 2.2.2.
For region 1 upwind of the projectile, positive and negative characteristic lines are
plotted using the equation in section 2.2.2.1 and the arbitrary set of points along the axis
and inflow boundaries. The lines are extended through region 1 up o the shock front
location. Intersections between positive and negative characteristic lines are determined
to form a characteristic net of points in the region. The flow field Mach number and turn
angle conditions are transferred to each point using the compatibility equations in
section 2.2.2.2. The corresponding pressure value is obtained from the Mach number
using the isentropic flow relation in section 2.2.2.5. Though initiated from the axis and
inflow boundary in this case, the calculations can be started from any of the region 1
boundaries with the same end result. Note the process described above yields a homoge-
neous field speed and turn angle so the characteristic net point density can be low to
reduction calculation time.
The calculations for region 2 are similar to the process for region 1 with one signifi-
cant modification relating to the negative characteristic lines. Two processes are applied
to generate these lines. The first process utilizes the points on the projectile surface to
project negative characteristic lines to the forward shock front Mach line. These lines
provide intersections with positive characteristic lines near the projectile, but do not
define intersections at larger radial distances or towards the projectile base. Therefore, a
second process is employed to create negative characteristic lines through the positive
characteristic line intersection points that defined the shock front at further distances
from the projectile. The second procedure is outlined in section 2.2.2.3 and determines a
local Mach angle (β) from the turn and Prandtl-Meyer angles for the intersecting positive
characteristic lines. This procedure can be applied to the entire region achieving nearly
the same result as the two step process. However, the two step process was chosen
because it did not rely on iterative calculations for the fluid closest to the projectile. The
resulting characteristic net and intersection points are illustrated in Figure 2-4.

27
Figure 2-4: Characteristic Net and Intersection Points
The figure shows positive characteristic lines (dark blue), negative characteristic
lines (green), the inflow region intersection points (black circles), the shock front points
(fuscia), and the downstream intersection points (red). The projectile is outlined in black.
Note the intersection point density is highest near the projectile nose where higher
gradients are anticipated, and lower throughout the inflow region (region 1) where the
fluid parameters are constant. The flow field Mach number and turn angle conditions are
transferred to each point in region 2 just as it was done for region 1 using the compatibil-
ity equations in section 2.2.2.2. The corresponding pressure value is obtained from the
Mach number using the isentropic flow relation in section 2.2.2.5. The region 2 calcula-
tions rely on the conditions at the shock front or projectile surface so results cannot be
obtained if the calculations are initiated from the upper inflow/outflow boundary condi-
tion.

28
2.2.2 Equations
The following sections present equations that are used to develop the characteristic
net and determine Mach number, turn angle and static pressure at the net points. The
equations are derived from isentropic flow, normal and oblique shock relations, and are
readily obtained from a variety of textbooks. Brief descriptions of the most relevant
equations are provided for clarity.
2.2.2.1 Characteristic Line Slope
The characteristic lines for two dimensional axi-symmetric irrotational flow prob-
lems are represented by the integral solutions to the following linear differential equation
(Equation 2.1):
( )µθ ±=
tan
chardx
dr
Equation 2.1 divides the characteristic lines into two subsets labeled C+ when (θ+µ)
is used and C– for the (θ–µ) term. Both sets of characteristic lines are straight Mach
lines for the external ballistic problem though this may not be the case for other classes
of problems.
2.2.2.2 Compatibility
The compatibility equations are also derived from the governing equations for two
dimensional axi-symmetric irrotational flow problems and represented by the integral
solutions to the following linear differential equations (Equation 2.2(a) and 2.2(b)):
(along C– characteristics) ( )
−−=+
r
dr
Md
θυθ
cot1
1
2
(along C+ characteristics) ( )
+−=−
r
dr
Md
θυθ
cot1
1
2
Note the values (θ+ν) and (θ–ν) are dependent on the radial coordinate of the point
and are undefined (infinite) for zero turn angle (θ) and radius distance (r). A small angle
of attack (α=0.0014 degrees) is added to the turn angle throughout the flow field, and a
small radius offset (r=0.00001 base diameters) is applied to the points in the inflow
region ahead of the projectile to ensure finite results throughout the calculations. The

29
differential terms on the left hand side are replaced by finite differences to solve equa-
tion 2.2 at each intersection point.
2.2.2.3 Local Mach Angle Calculation
The iterative procedure for calculating the negative characteristic line slope at the
shock front starts with the θ–β–M relation (Equation 2.3):
( )( )
++
−=
22cos
1sincot2arctan,
2
22
βγ
βββθ
M
MM
An initial β is assumed for the first iteration. Here γ is an assumed constant for air
and the upstream Mach is used. The resulting turn angle is used to calculate a Mach
number immediately downstream of the shock through the normal component of the
inflow velocity and normal shock relations [1]. Once the downstream Mach number is
known, the Prandtl-Meyer angle can be determined and a positive characteristic line
compatibility value (θ–ν) is calculated. The process is repeated until a local Mach angle
is found that produces the desired positive characteristic line compatibility value within
some acceptable tolerance value . A table consisting of local Mach angle, turn angle,
downstream Mach number, Prandtl-Meyer angle and positive characteristic line com-
patibility values was interpolated (look up the desired value for θ–ν) to eliminate the
iterative process.
2.2.2.4 Prandtl-Meyer Function
The compatibility equations include a Prandtl-Meyer angle term that is obtained
from the Prandtl-Meyer function. The value of this function is given by (Equation 2.4):
( ) ( ) ( )1arctan11
1arctan
1
1 22 −−−−
+
−
+= MMM
γ
γ
γ
γυ
It is possible to obtain a value for this angle at points in the physical plane where
characteristic lines intersect. The corresponding Mach number is determined by iterative
application of equation 2.4 or other more efficient techniques. A table of ν vs. Mach
number was interpolated to eliminate the iterative process.

30
2.2.2.5 Pressure
The ratio of static pressure (p) to total or stagnation pressure (p0) is related to the
local Mach number at a point in the physical plan by the isentropic flow relationship
(Equation 2.5):
120
2
11
−
−+=
γ
γ
γM
p
p
Note the definition of total pressure is derived using the isentropic flow assumption
and has limited applicability to the supersonic external ballistics problem because the
flow field may not be considered isentropic in many cases.
2.3 Numerical Method
The finite volume numerical method is a shock capturing mathematic approach that
estimates the solution to the governing differential equations using boundary conditions
given in the problem definition [1]. The boundary conditions typically include geometric
(e.g. projectile wall) and fluid property (e.g. constant inflow velocity) constraints, and do
not require prior knowledge of major flow gradients. The obvious advantage is that flow
features may be predicted or captured by analysis without thorough experimentation or
prior experience with similar flow problems. The solution method is not mathematically
exact and like the MoC may not capture all of the expected flow field physics.
The numerical method calculations apply an implicit second order upwind finite
volume calculation through Fluent® software to solve the inviscid Euler equations in
integral form described in section 1.3 [11]. Fluent® has been structured to solve the
governing equations in either a pressure or density based form.
31
A control volume calculation technique is utilized regardless of the solver choice.
The general procedure steps are outlined below.
• The physical plane is divided into discrete control volumes using a mesh or grid
• The integral equations are solved for each control volume to yield algebraic linear
equations for dependent variables such as velocity, pressure and other conserved
scalar parameters
• The system of algebraic linear equations is solved to yield updated values of the
dependent variables
Further details regarding the pressure and density based solvers and more specific
calculation procedures are provided in section 2.3.2.1.
2.3.1 Mesh Generation
The physical plane mesh is generated in Gambit® software using an x-y plane that
extends outward from the projectile axis where distance is measured in projectile base
diameters [16]. The y-direction is translated into an axi-symmetric r-direction once the
mesh and boundary conditions are imported into Fluent® and the axi-symmetric solver
feature is selected.
The mesh is 20 diameters radial by 40 diameters axial and is positioned forward of
the projectile nose by 5 diameters (or 1 projectile length) for consistency with the MoC
calculations. The resulting physical plane is annotated with boundary labels and shown
in Figure 2-5. The figure content is identical to MoC Figure 2-1.
32
Physical Plane Illustration
Inflow Boundary
Wall Boundary
Outflow Boundary
Upper Inflow / Outflow Boundary
Flow
Figure 2-5: Physical Plane Mesh
A structured grid requires less memory, provides superior accuracy and allows a
better boundary-layer resolution than an unstructured grid for most solvers. A structured
grid also provides a better resolution around sharp leading and trailing edges by having
cells with a large aspect ratio in these regions. Then numerical calculations herein use
the structured grid.
A mesh density study is performed to evaluate solution accuracy as a function of
nodal spacing. Three mesh sizes were selected based on their scale compared to the
projectile base radius (the smallest dimension on the physical plane) and with considera-
tion towards scales that were applied by other researchers conducting more complex
turbulence research. The three mesh sizes are labeled coarse, medium and fine where the
mesh densities are comparable to referenced research literature [3]. The comparison is
presented in Table 2-1.
33
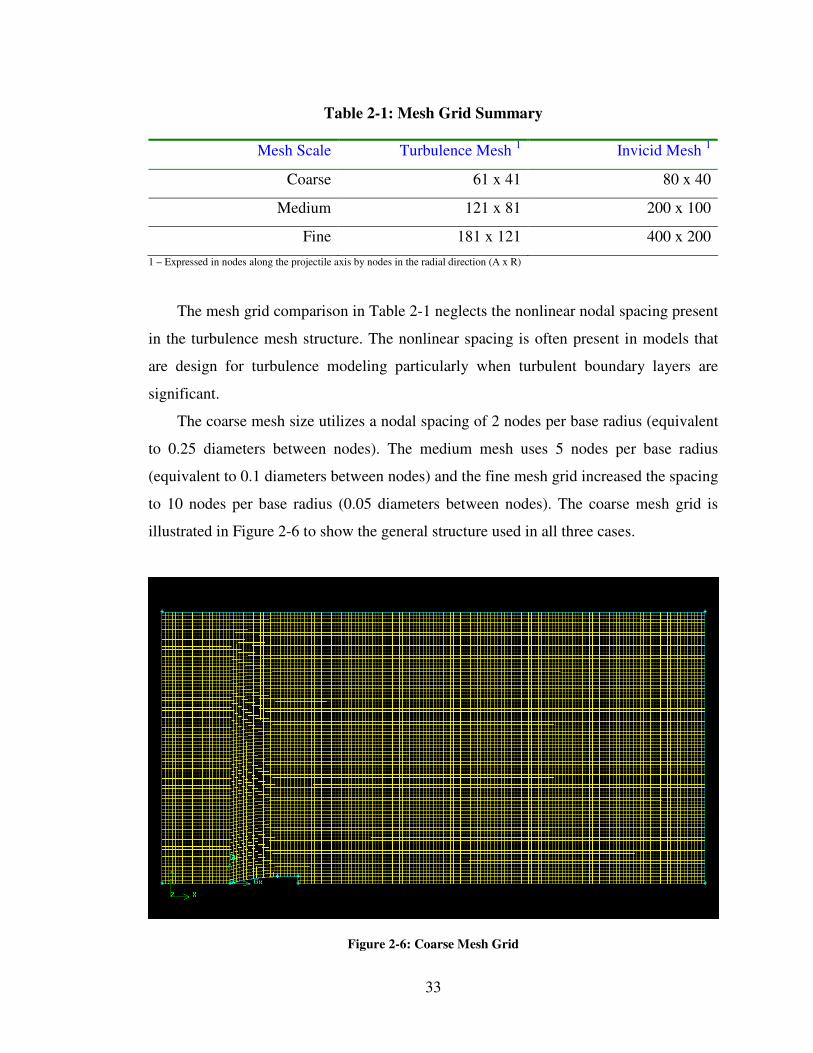
Table 2-1: Mesh Grid Summary
Mesh Scale Turbulence Mesh 1 Invicid Mesh
1
Coarse 61 x 41 80 x 40
Medium 121 x 81 200 x 100
Fine 181 x 121 400 x 200
1 – Expressed in nodes along the projectile axis by nodes in the radial direction (A x R)
The mesh grid comparison in Table 2-1 neglects the nonlinear nodal spacing present
in the turbulence mesh structure. The nonlinear spacing is often present in models that
are design for turbulence modeling particularly when turbulent boundary layers are
significant.
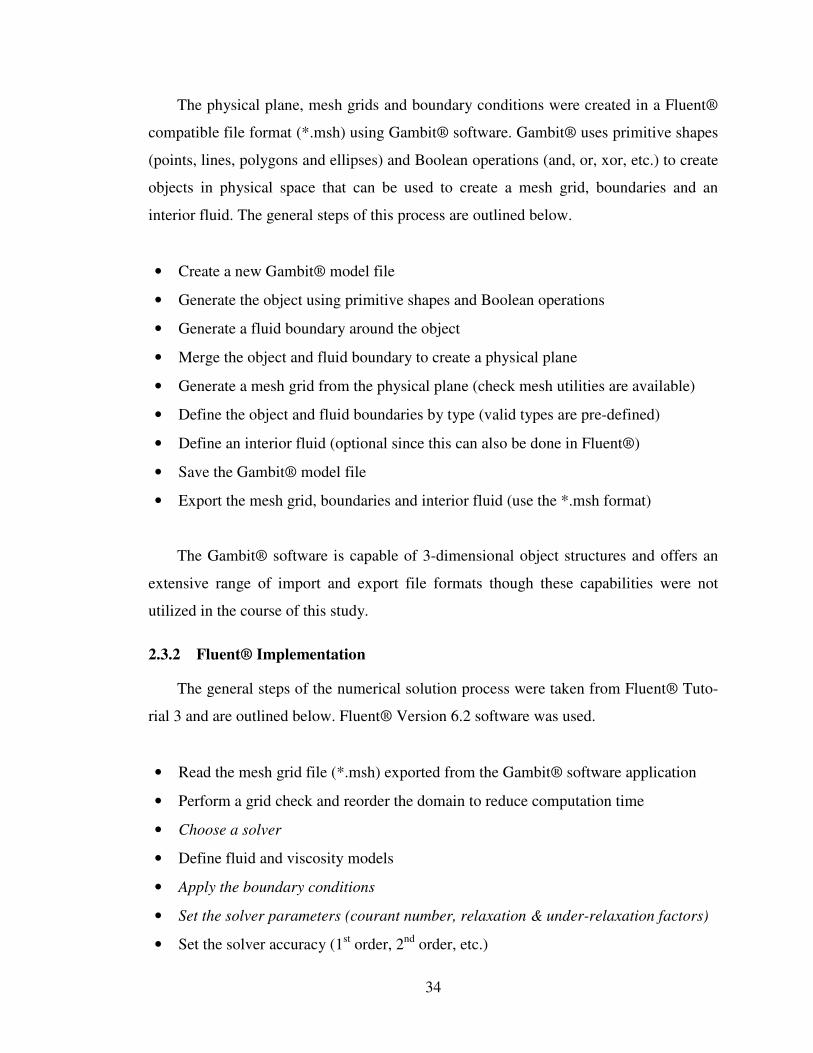
The coarse mesh size utilizes a nodal spacing of 2 nodes per base radius (equivalent
to 0.25 diameters between nodes). The medium mesh uses 5 nodes per base radius
(equivalent to 0.1 diameters between nodes) and the fine mesh grid increased the spacing
to 10 nodes per base radius (0.05 diameters between nodes). The coarse mesh grid is
illustrated in Figure 2-6 to show the general structure used in all three cases.
Figure 2-6: Coarse Mesh Grid
34
The physical plane, mesh grids and boundary conditions were created in a Fluent®
compatible file format (*.msh) using Gambit® software. Gambit® uses primitive shapes
(points, lines, polygons and ellipses) and Boolean operations (and, or, xor, etc.) to create
objects in physical space that can be used to create a mesh grid, boundaries and an
interior fluid. The general steps of this process are outlined below.
• Create a new Gambit® model file
• Generate the object using primitive shapes and Boolean operations
• Generate a fluid boundary around the object
• Merge the object and fluid boundary to create a physical plane
• Generate a mesh grid from the physical plane (check mesh utilities are available)
• Define the object and fluid boundaries by type (valid types are pre-defined)
• Define an interior fluid (optional since this can also be done in Fluent®)
• Save the Gambit® model file
• Export the mesh grid, boundaries and interior fluid (use the *.msh format)
The Gambit® software is capable of 3-dimensional object structures and offers an
extensive range of import and export file formats though these capabilities were not
utilized in the course of this study.
2.3.2 Fluent® Implementation
The general steps of the numerical solution process were taken from Fluent® Tuto-
rial 3 and are outlined below. Fluent® Version 6.2 software was used.
• Read the mesh grid file (*.msh) exported from the Gambit® software application
• Perform a grid check and reorder the domain to reduce computation time
• Choose a solver
• Define fluid and viscosity models
• Apply the boundary conditions
• Set the solver parameters (courant number, relaxation & under-relaxation factors)
• Set the solver accuracy (1st order, 2
nd order, etc.)
35
• Set the residual error monitors and convergence limits (implicit solver only)
• Initialize the solution
• Iterate the solution until satisfactory convergence is achieved
Each of these steps involves little effort to implement though some of the choices
have substantial impact on the type of solution obtained, rate of solution convergence
and accuracy. The more involved steps are shown in italics and discussed in further
detail below.
2.3.2.1 Solver Selection
Choose a solver – A pressure-based and density-based solver is available for the
calculation. The pressure-based approach was originally developed for low-speed
incompressible flows while the density-based approach was mainly used for high-speed
compressible flows. The current software release contains updates that reformulate and
extend each method to solve for a wide range of flow conditions beyond their original
intent. Both methods apply the same technique to obtain the velocity field from the
momentum equations. However, there are differences with regard to the pressure solu-
tions. In the density-based approach, the continuity equation is used to obtain the density
field while the pressure field is determined from the equation of state. The pressure-
based approach obtains the pressure field using a specific algorithm that belongs to a
general class of methods called the projection method. In the projection method, the
mass conservation (continuity) constraint of the velocity field is achieved by solving a
pressure (or pressure correction) equation. The pressure equation is derived from the
continuity and the momentum equations in such a way that the velocity field, corrected
by the pressure, satisfies continuity. Since the governing equations are nonlinear and
coupled, the solution process involves iterations where the entire set of governing
equations is solved repeatedly until the solution converges.
Though both solvers were evaluated, the results for the density-based solver are pre-
sented herein since this solver converged faster than the pressure-based solver. The
density based solver was also considered appropriate because it was originally designed
for incompressible supersonic flow problems. An implicit formulation with the Green-
36
Gauss Cell Based gradient option was selected arbitrarily. The remaining options were
easily determined from the problem definition. The 2D option is selected to indicate that
the problem is two-dimensional. The axi-symmetric option is used since solution domain
is in cylindrical coordinates rather than a Cartesian coordinate system, and a steady state
solution is desired so the steady state feature is chosen.
2.3.2.2 Boundary Condition Implementation
Apply the boundary conditions – Several boundary condition categories are pro-
vided for defining problem geometry. Two types were selected for this problem as
described in further detail below.
The inflow, outflow and upper inflow/outflow boundary conditions are implemented
with a pressure far field condition used for virtual (or cut) fluid boundaries where the
inflow or outflow characteristics are not necessarily known. This boundary type accepts
an initial speed, direction vector and reference pressure input. The problem definition in
section 1.2 indicates initial conditions are Mach 2.0 with zero degrees angle of attack (α)
at standard atmospheric pressure (101325 Pa) and temperature (300K). Fluid flow is
permitted in any x-r plane direction during the implicit calculation process.
The axis (or centerline) and projectile wall boundary is set using a wall condition
that enforces parallel flow (or zero normal flow) along the surface. Other boundary types
including the axis and symmetry boundary were considered, but determined to be inap-
propriate for this boundary case because they generated software execution warnings. It
is noted that special attention must be applied when employing numerical solution
methods to the sharp corner wall condition at the outer radius of the projectile base. The
values for pressure, density and temperature at the corner should utilize conditions at the
projectile wall rather than at the center axis, and values at the intersection of the center
axis and base should use conditions along the center axis rather than the projectile wall.
2.3.2.3 Solver Control
Set the solver parameters – The density based solver employs options for discretiza-
tion, Courant number and flux type. The discretization option establishes the numerical
method for the calculations. In this case, a second order upwind method is applied. The

37
Courant number controls the time step size, solution stability and rate of convergence.
Values between 5 and 20 were applied for this calculation. The flux type option de-
scribes the flux splitting scheme that is employed in the calculation. The Roe Flux-
Difference Splitting (Roe-FDS) was applied to this problem because the alternative
(Advection Upstream Splitting Method or AUSM) scheme did not yield a converging
solution.
2.3.2.4 Solution Monitoring and Convergence
Set the residual error monitors and convergence limits – Implicit method solvers
use differences between physical parameters such as fluid continuity (conservation of
mass), velocity or energy from one iteration step to the next step as a means of determin-
ing when a level of solution accuracy is achieved. This difference is called residual error
and is generally considered favorable as the value approaches zero. Error values that
oscillate without approaching zero are considered unsatisfactory. Fluent® offers stan-
dard residual error monitors that calculate and compare continuity, velocity and total
energy values averaged over the entire mesh grid. The software also offers user-specified
residual error monitors with a variety of capabilities. For this evaluation, standard
residual error monitors were set for continuity (conservation of mass), x-velocity, y-
velocity and total energy. The solution was considered to have converged when the
continuity residual error values were less than 1 x 10-5
kg, x-velocity and r-velocity was
less than 0.001 m/s, and total energy was less than 1 x 10-6
joules. A user specified
convergence monitor was created for the projectile drag coefficient so the result could be
compared to empirical data [2]. The drag coefficient (Cd) was considered satisfactory
provided a constant value with no oscillation was noted towards the end of the solution.
In practice, the density based numerical solution met the residual error and conver-
gence criteria with no application warnings or divergence detection. The pressure based
solver did not yield a satisfactory result when initialized with a supersonic boundary
condition. However, a converged solution was obtained by incrementally increasing the
boundary velocity from a subsonic condition to the desired supersonic condition. In
other words, the solution at the desired flow condition was achieved with few warnings
and no errors by dividing the problem into a series of lower velocity problems where the

38
results from the previous velocity condition provided an initial solution for the next
(higher) velocity condition. The initial boundary condition was set to a velocity of Mach
0.8 and iterated until the residual errors were less than the previously specified limits,
and the drag coefficient had converged to a single non-oscillating value. Next, the
velocity boundary condition was increased to Mach 1.5, 1.75 and finally the desired
condition, Mach 2.0. The aforementioned residual error and convergence criteria were
not achieved for the intermediate velocity conditions (Mach 1.5 and 1.75) though the
solver relaxation parameter was reduced slightly (from 0.75 to 0.70) to prevent the
occurrence of an oscillating drag coefficient value. A similar approach was tested to
rapidly obtain a solution for the axi-symmetric option using 2-dimensional Cartesian
coordinate results. In each case, the final pressure based solutions were similar to the
density based solutions when the same convergence criteria were met. The density based
solver proved capable of achieving smaller convergence criteria compared to the pres-
sure based solver.
The technique of applying the results from one solution to initialize another solution
proved useful as a means of overcoming specific problems encountered during both
medium and fine mesh grid solutions, and may in fact be beneficial when solving other
problem types. These lessons were considered sufficiently valuable to retain here even
though the pressure based solver results are not utilized.
The models and solutions are stored in Fluent® case files for use with the Fluent®
software. The solutions are exported in comma separated value ASCII format and read
into Matlab® and Microsoft Excel® for comparison to the MoC results.
39
3. Results and Discussion
A critical view of any analysis is an important step to determining its accuracies and
limitations, and can be achieved through comparison to other analytic, numerical or
experimental works. In this study, the comparison between two calculation methods is
the primary focus. Additional quantitative and qualitative comparisons are performed
using experimental data and like research where possible. The following sections discuss
the comparisons between MoC and numerical solutions with concentration of the
representation of the velocity field. Selected results for the pressure field and calculation
of projectile drag coefficient are also examined and compared to results from other
sources. One such source is an experimental result for a similar supersonic projectile that
illustrates the anticipated shock front and flow expansion characteristics. Other field
parameters such as entropy or enthalpy have not been interrogated in any detail and the
corresponding physics may not be adequately represented by any of the solutions
presented herein. The following sections present the experimental illustration and
comparisons between MoC and numerical solution results for the coarse, medium and
fine mesh models.
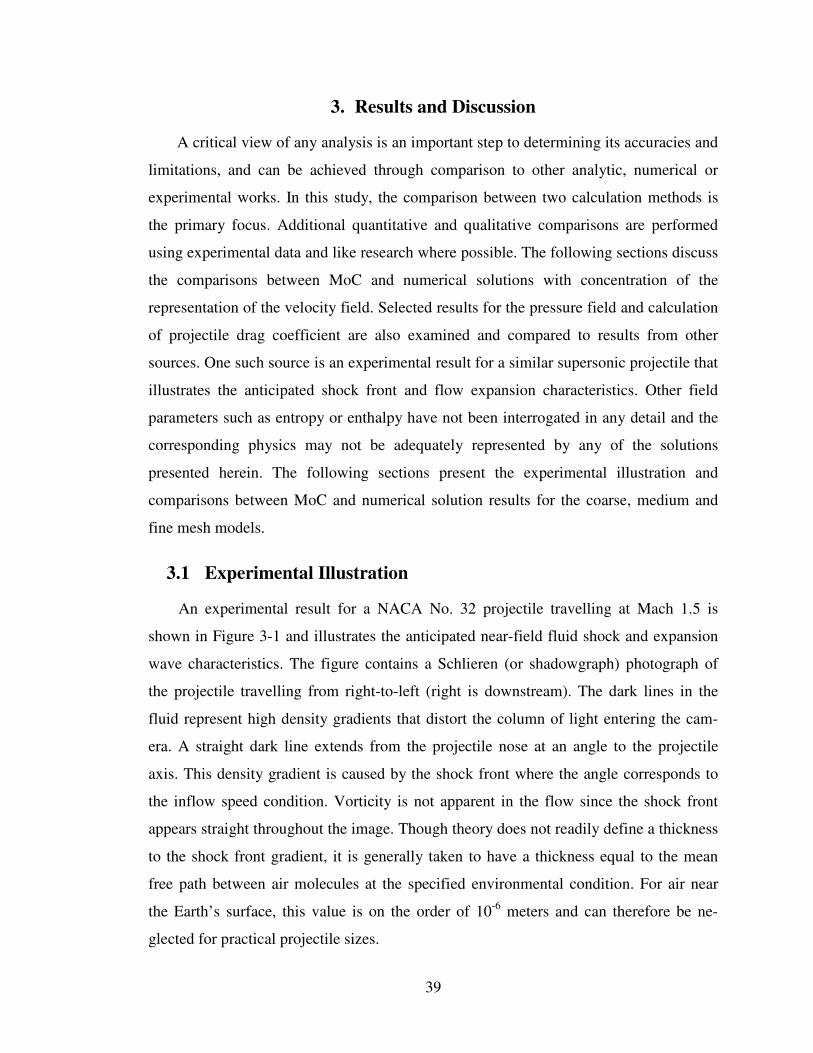
3.1 Experimental Illustration
An experimental result for a NACA No. 32 projectile travelling at Mach 1.5 is
shown in Figure 3-1 and illustrates the anticipated near-field fluid shock and expansion
wave characteristics. The figure contains a Schlieren (or shadowgraph) photograph of
the projectile travelling from right-to-left (right is downstream). The dark lines in the
fluid represent high density gradients that distort the column of light entering the cam-
era. A straight dark line extends from the projectile nose at an angle to the projectile
axis. This density gradient is caused by the shock front where the angle corresponds to
the inflow speed condition. Vorticity is not apparent in the flow since the shock front
appears straight throughout the image. Though theory does not readily define a thickness
to the shock front gradient, it is generally taken to have a thickness equal to the mean
free path between air molecules at the specified environmental condition. For air near
the Earth’s surface, this value is on the order of 10-6
meters and can therefore be ne-
glected for practical projectile sizes.
40
Figure 3-1: Schlieren Illustration for a NACA 1122 No. 32 Shape (w/Boat Tail)
The region immediately downstream of the shock is populated by a series of less intense
lines attached to the projectile ogive section. These lines indicate a more gradual density
gradient and represent the expansion region downstream of the shock. Few (if any) lines
are obvious along the projectile body though expansion is noted in similar research [3].
Other expansion regions are noted at the forward portion of the boat tail and base, and a
turbulent boundary layer is apparent along the body as a thin layer of eddies or curves.
Similar eddies are noted downstream of the base where turbulent flow conditions exist.
No turbulent flow features are included in this study.
Shock Front
Expansion Regions
Boundary Layer
41
3.2 Quantitative Comparisons
The MoC results are not easily compared to the numerical solutions due to the addi-
tional assumptions of isentropic irrotational flow, and because the characteristic net
consists of irregularly spaced points. However, quantitative comparisons are possible for
a subset of the MoC results including:
• Angle of the shock front relative to the projectile axis
• Shock front attachment to the projectile
• Angle of the Mach line at the projectile base
• Mach number immediately downstream of the shock front
• Minimum Mach number magnitude and position near the projectile
• Mach number and pressure along the projectile surface
Each of these topics is discussed in the following paragraphs. It is recognized that
surface or point-for-point field comparisons are possible using an interpolation routine or
iterative refinements to characteristic net. However, development of an interpolation
routine or data tabulation was not considered to add substantially to new understanding
of the problem.
Angle of the shock front relative to the projectile axis – The MoC calculation pro-
duces a shock front at an angle of 30 degrees with respect to the projectile axis. The
angle is set by the inflow boundary condition Mach number. The shape of the shock
front is addressed later in section 3.3.
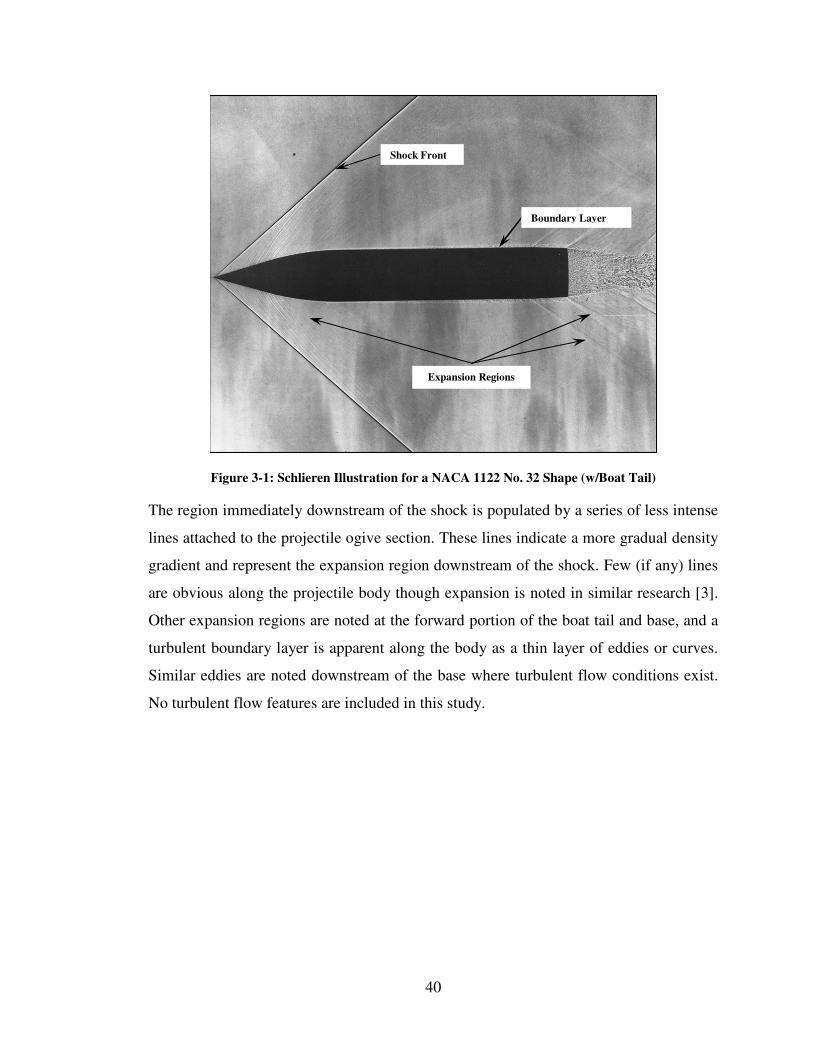
Shock front attachment to the projectile – The nose of the projectile is shown in
Figure 3-2 to examine the attached or detached condition of the shock front. The figure
indicates the shock front is attached and oblique at the nose. The significance of this
attribute will become more apparent in later numerical solution comparisons.
42
Figure 3-2: Verification of Shock Attachment
Angle of the Mach line at the projectile base – As noted earlier, the positive charac-
teristic lines in the ogive section diverge as radial distance increases. The characteristic
lines return to a parallel orientation at the transition to the body section and form an
angle to the projectile axis that is nearly equal to the inflow region. The Mach line at the
base of the projectile is oriented at 30.03 degrees relative to the projectile axis and
represents the base region expansion fan forward Mach line. The label is selected to
recognize that the positive characteristic lines form a fan similar to the lines intersecting
the ogive and denote an expansion region downstream of the base. The characteristic
line fan terminates when flow detaches from the base of the projectile.
Mach number immediately downstream of the shock front – A comparison of the
Mach number immediately downstream of the shock front is shown in Figure 3-3. The
data is plotted with respect to the projectile axis since both Mach number and radial
distance increase as axial distance from the projectile nose grows. The numerical results
were selected using an algorithm that located the mesh points nearest to the MoC points
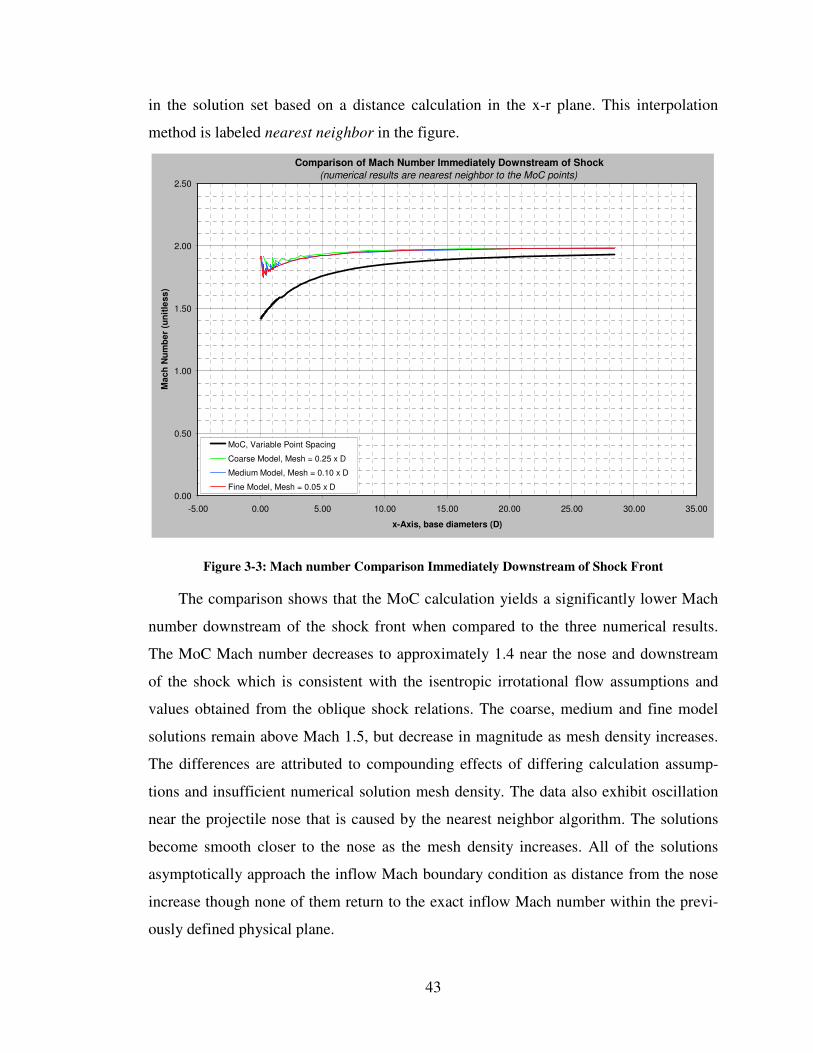
43
in the solution set based on a distance calculation in the x-r plane. This interpolation
method is labeled nearest neighbor in the figure.
Comparison of Mach Number Immediately Downstream of Shock
(numerical results are nearest neighbor to the MoC points)
0.00
0.50
1.00
1.50
2.00
2.50
-5.00 0.00 5.00 10.00 15.00 20.00 25.00 30.00 35.00
x-Axis, base diameters (D)
Ma
ch
Nu
mb
er
(un
itle
ss
)
MoC, Variable Point Spacing
Coarse Model, Mesh = 0.25 x D
Medium Model, Mesh = 0.10 x D
Fine Model, Mesh = 0.05 x D
Figure 3-3: Mach number Comparison Immediately Downstream of Shock Front
The comparison shows that the MoC calculation yields a significantly lower Mach
number downstream of the shock front when compared to the three numerical results.
The MoC Mach number decreases to approximately 1.4 near the nose and downstream
of the shock which is consistent with the isentropic irrotational flow assumptions and
values obtained from the oblique shock relations. The coarse, medium and fine model
solutions remain above Mach 1.5, but decrease in magnitude as mesh density increases.
The differences are attributed to compounding effects of differing calculation assump-
tions and insufficient numerical solution mesh density. The data also exhibit oscillation
near the projectile nose that is caused by the nearest neighbor algorithm. The solutions
become smooth closer to the nose as the mesh density increases. All of the solutions
asymptotically approach the inflow Mach boundary condition as distance from the nose
increase though none of them return to the exact inflow Mach number within the previ-
ously defined physical plane.

44
Minimum Mach number magnitude and position near the projectile – The MoC,
coarse, medium and fine model solutions were evaluated to locate the minimum Mach
number and position in the physical plane. The results are presented in Table 3-1.
Table 3-1: Minimum Mach number Comparison
Source
Position
x-Axis
Position
r-Axis
Distance
to Nose
Local
Mach
Method of Characteristics 0.0312 0.0180 0.0360 1.4282
Coarse Mesh Model 0.9834 0.2441 1.0132 1.7960
Medium Mesh Model 0.4892 0.1320 0.5067 1.7338
Fine Mesh Model 0.2405 0.0675 0.2498 1.7124
The table shows the MoC minimum Mach number is lower and located closer to the
projectile nose than all three numerical model results. As noted in discussion of Figure
3-3, the MoC values assume isentropic irrotational flow to obtain a solution. The nu-
merical solution trend also suggest that the local Mach will converge towards the MoC
value with increasing mesh density though it is not clear that the MoC value will be
achieved.
Mach number and pressure along the projectile surface – The MoC, coarse, me-
dium and fine model solutions for Mach number along the projectile surface are
presented in Figure 3-4. The MoC Mach number decreases sharply from the inflow
Mach number to the minimum Mach value almost immediately at the projectile nose.
The values increase linearly throughout the ogive section and are equal to the inflow
Mach number downstream of the intersection between the ogive and body sections at
3.50 base diameters from the nose. The sharp decrease at the projectile nose indicates a
sharp gradient or discontinuity in the flow field corresponding to the formation of the
shock front. The steadily increasing Mach number over the ogive section corresponds to
flow expansion. Both the magnitude and trend shown here are similar to earlier MoC
calculations performed for a missile ogive at Mach 2 [13]. The observation that the
Mach number remains constant and equal to the inflow Mach number across the body
section suggests that no shock or expansion occurs in the adjacent fluid region. The
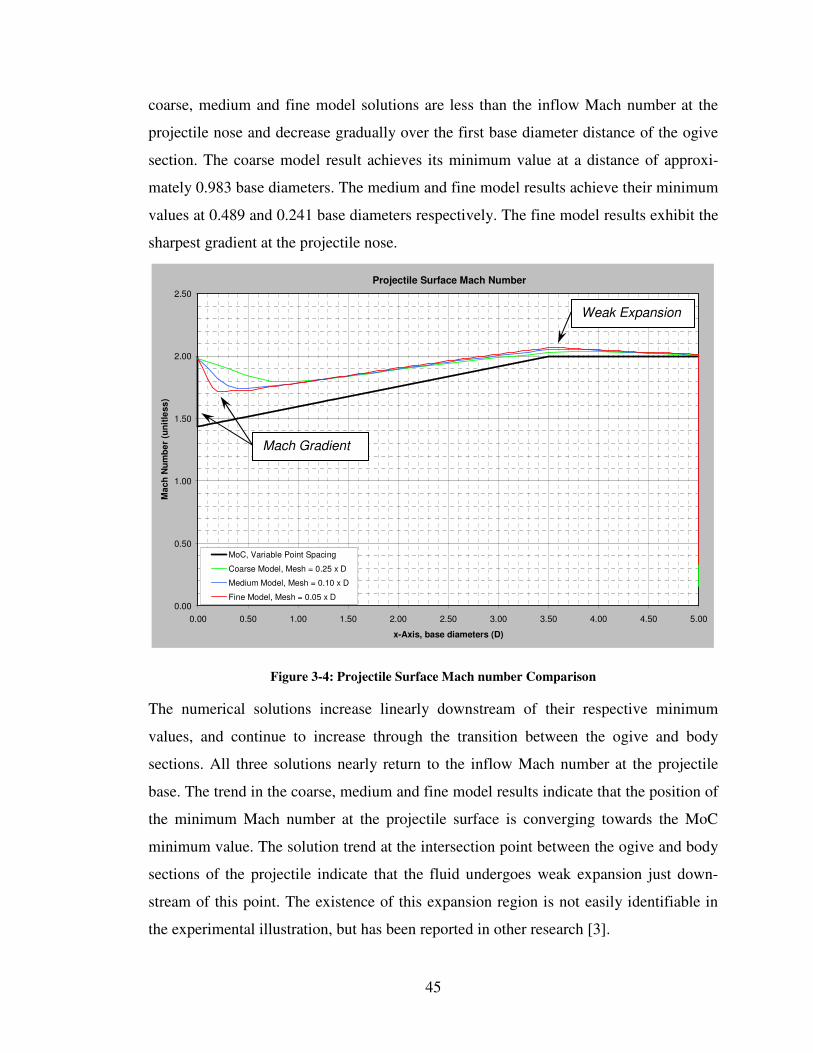
45
coarse, medium and fine model solutions are less than the inflow Mach number at the
projectile nose and decrease gradually over the first base diameter distance of the ogive
section. The coarse model result achieves its minimum value at a distance of approxi-
mately 0.983 base diameters. The medium and fine model results achieve their minimum
values at 0.489 and 0.241 base diameters respectively. The fine model results exhibit the
sharpest gradient at the projectile nose.
Projectile Surface Mach Number
0.00
0.50
1.00
1.50
2.00
2.50
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50 5.00
x-Axis, base diameters (D)
Ma
ch
Nu
mb
er
(un
itle
ss
)
MoC, Variable Point Spacing
Coarse Model, Mesh = 0.25 x D
Medium Model, Mesh = 0.10 x D
Fine Model, Mesh = 0.05 x D
Figure 3-4: Projectile Surface Mach number Comparison
The numerical solutions increase linearly downstream of their respective minimum
values, and continue to increase through the transition between the ogive and body
sections. All three solutions nearly return to the inflow Mach number at the projectile
base. The trend in the coarse, medium and fine model results indicate that the position of
the minimum Mach number at the projectile surface is converging towards the MoC
minimum value. The solution trend at the intersection point between the ogive and body
sections of the projectile indicate that the fluid undergoes weak expansion just down-
stream of this point. The existence of this expansion region is not easily identifiable in
the experimental illustration, but has been reported in other research [3].
Mach Gradient
Weak Expansion
46
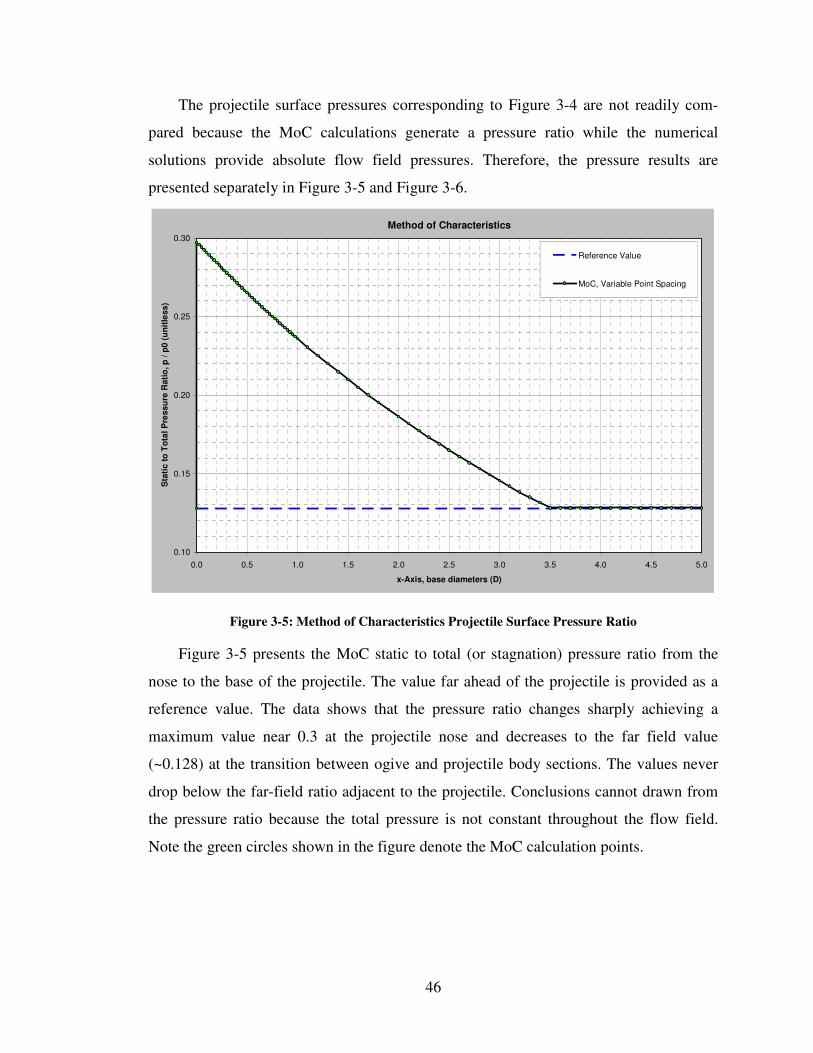
The projectile surface pressures corresponding to Figure 3-4 are not readily com-
pared because the MoC calculations generate a pressure ratio while the numerical
solutions provide absolute flow field pressures. Therefore, the pressure results are
presented separately in Figure 3-5 and Figure 3-6.
Method of Characteristics
0.10
0.15
0.20
0.25
0.30
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
x-Axis, base diameters (D)
Sta
tic t
o T
ota
l P
ressu
re R
ati
o, p
/ p
0 (
un
itle
ss)
Reference Value
MoC, Variable Point Spacing
Figure 3-5: Method of Characteristics Projectile Surface Pressure Ratio
Figure 3-5 presents the MoC static to total (or stagnation) pressure ratio from the
nose to the base of the projectile. The value far ahead of the projectile is provided as a
reference value. The data shows that the pressure ratio changes sharply achieving a
maximum value near 0.3 at the projectile nose and decreases to the far field value
(~0.128) at the transition between ogive and projectile body sections. The values never
drop below the far-field ratio adjacent to the projectile. Conclusions cannot drawn from
the pressure ratio because the total pressure is not constant throughout the flow field.
Note the green circles shown in the figure denote the MoC calculation points.
47
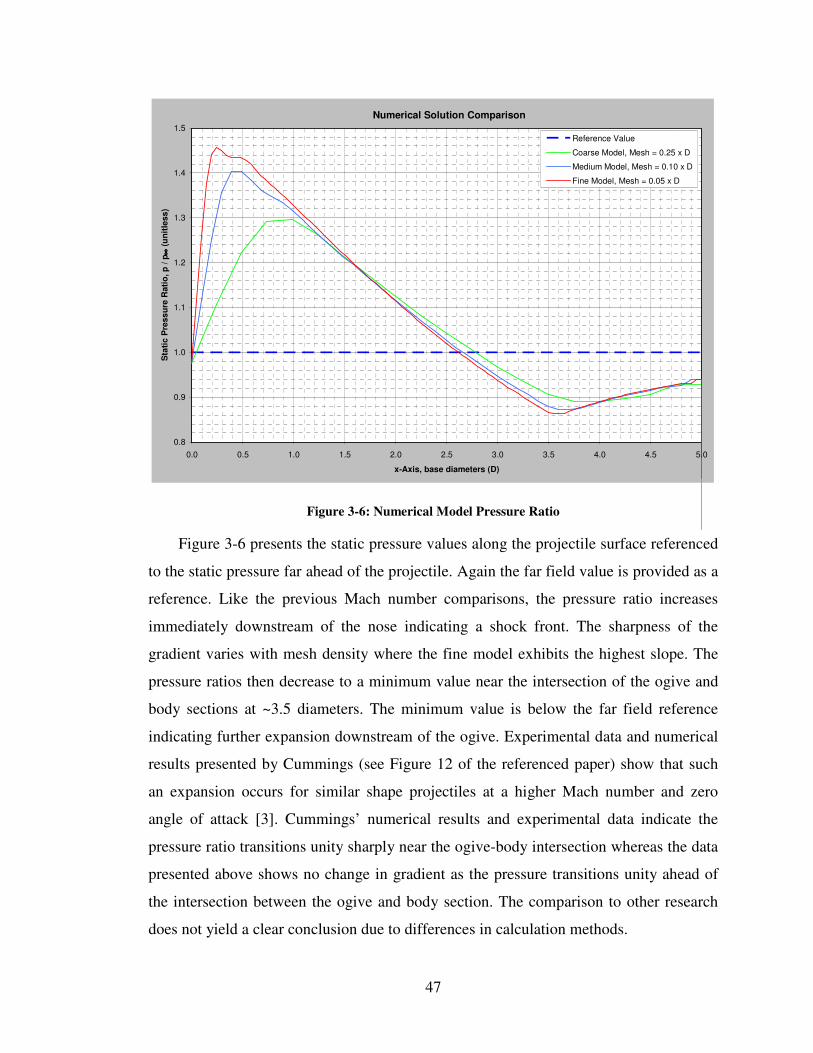
Numerical Solution Comparison
0.8
0.9
1.0
1.1
1.2
1.3
1.4
1.5
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0
x-Axis, base diameters (D)
Sta
tic P
ress
ure
Rati
o, p
/ p
∞∞ ∞∞ (
un
itle
ss
)
Reference Value
Coarse Model, Mesh = 0.25 x D
Medium Model, Mesh = 0.10 x D
Fine Model, Mesh = 0.05 x D
Figure 3-6: Numerical Model Pressure Ratio
Figure 3-6 presents the static pressure values along the projectile surface referenced
to the static pressure far ahead of the projectile. Again the far field value is provided as a
reference. Like the previous Mach number comparisons, the pressure ratio increases
immediately downstream of the nose indicating a shock front. The sharpness of the
gradient varies with mesh density where the fine model exhibits the highest slope. The
pressure ratios then decrease to a minimum value near the intersection of the ogive and
body sections at ~3.5 diameters. The minimum value is below the far field reference
indicating further expansion downstream of the ogive. Experimental data and numerical
results presented by Cummings (see Figure 12 of the referenced paper) show that such
an expansion occurs for similar shape projectiles at a higher Mach number and zero
angle of attack [3]. Cummings’ numerical results and experimental data indicate the
pressure ratio transitions unity sharply near the ogive-body intersection whereas the data
presented above shows no change in gradient as the pressure transitions unity ahead of
the intersection between the ogive and body section. The comparison to other research
does not yield a clear conclusion due to differences in calculation methods.
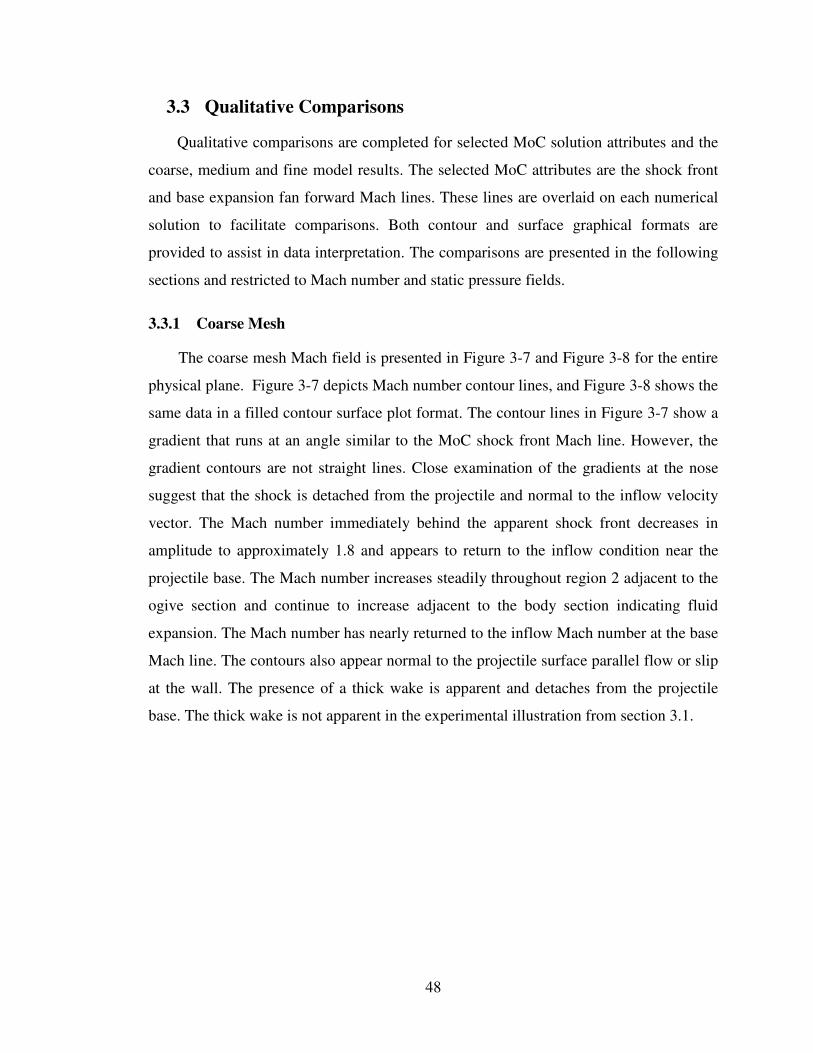
48
3.3 Qualitative Comparisons
Qualitative comparisons are completed for selected MoC solution attributes and the
coarse, medium and fine model results. The selected MoC attributes are the shock front
and base expansion fan forward Mach lines. These lines are overlaid on each numerical
solution to facilitate comparisons. Both contour and surface graphical formats are
provided to assist in data interpretation. The comparisons are presented in the following
sections and restricted to Mach number and static pressure fields.
3.3.1 Coarse Mesh
The coarse mesh Mach field is presented in Figure 3-7 and Figure 3-8 for the entire
physical plane. Figure 3-7 depicts Mach number contour lines, and Figure 3-8 shows the
same data in a filled contour surface plot format. The contour lines in Figure 3-7 show a
gradient that runs at an angle similar to the MoC shock front Mach line. However, the
gradient contours are not straight lines. Close examination of the gradients at the nose
suggest that the shock is detached from the projectile and normal to the inflow velocity
vector. The Mach number immediately behind the apparent shock front decreases in
amplitude to approximately 1.8 and appears to return to the inflow condition near the
projectile base. The Mach number increases steadily throughout region 2 adjacent to the
ogive section and continue to increase adjacent to the body section indicating fluid
expansion. The Mach number has nearly returned to the inflow Mach number at the base
Mach line. The contours also appear normal to the projectile surface parallel flow or slip
at the wall. The presence of a thick wake is apparent and detaches from the projectile
base. The thick wake is not apparent in the experimental illustration from section 3.1.
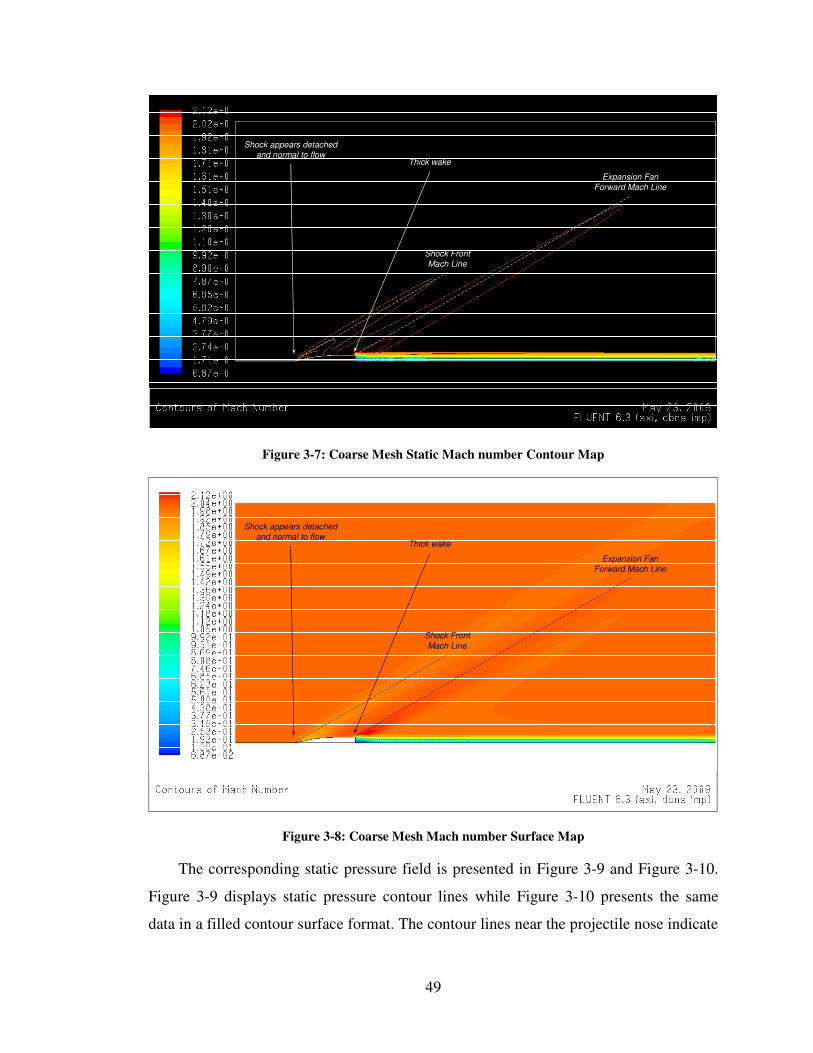
49
NACA Report 1122, No. 24 Shape
Shock appears detached
and normal to flowThick wake
Shock Front
Mach Line
Expansion Fan
Forward Mach Line
Figure 3-7: Coarse Mesh Static Mach number Contour Map
Shock appears detached
and normal to flowThick wake
Shock Front
Mach Line
Expansion Fan
Forward Mach Line
Figure 3-8: Coarse Mesh Mach number Surface Map
The corresponding static pressure field is presented in Figure 3-9 and Figure 3-10.
Figure 3-9 displays static pressure contour lines while Figure 3-10 presents the same
data in a filled contour surface format. The contour lines near the projectile nose indicate

50
a gradient that forms an angle to the projectile axis that is similar to the MoC shock front
Mach line. The gradient angle is greater than the shock front Mach line angle and curved
near the projectile nose. As with the Mach number figures, close examination of the
gradients at the nose suggest that the shock is detached, forward of the projectile and
normal to the inflow velocity vector. The static pressure immediately behind the shock
front increases and appears to return to the inflow condition near the projectile base. The
static pressure decreases steadily throughout the region adjacent to the ogive and into the
region adjacent to the body. The static pressure has nearly returned to the inflow static
pressure at the transition to region 3. The base expansion is not well defined because the
contours that run parallel to the MoC Mach line extend forward of the projectile base.
Shock appears detached
and normal to flowThick wake
Shock Front
Mach Line
Expansion Fan
Forward Mach Line
Figure 3-9: Coarse Mesh Pressure Contour Map
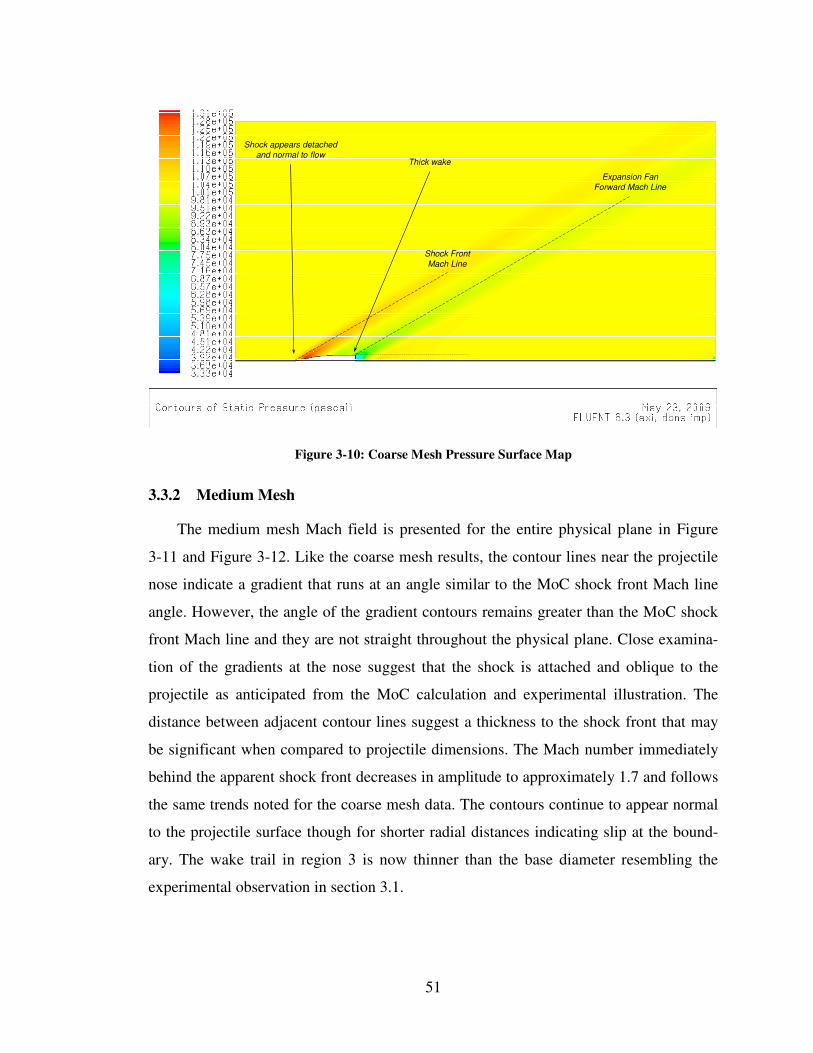
51
Shock appears detached
and normal to flowThick wake
Shock Front
Mach Line
Expansion Fan
Forward Mach Line
Figure 3-10: Coarse Mesh Pressure Surface Map
3.3.2 Medium Mesh
The medium mesh Mach field is presented for the entire physical plane in Figure
3-11 and Figure 3-12. Like the coarse mesh results, the contour lines near the projectile
nose indicate a gradient that runs at an angle similar to the MoC shock front Mach line
angle. However, the angle of the gradient contours remains greater than the MoC shock
front Mach line and they are not straight throughout the physical plane. Close examina-
tion of the gradients at the nose suggest that the shock is attached and oblique to the
projectile as anticipated from the MoC calculation and experimental illustration. The
distance between adjacent contour lines suggest a thickness to the shock front that may
be significant when compared to projectile dimensions. The Mach number immediately
behind the apparent shock front decreases in amplitude to approximately 1.7 and follows
the same trends noted for the coarse mesh data. The contours continue to appear normal
to the projectile surface though for shorter radial distances indicating slip at the bound-
ary. The wake trail in region 3 is now thinner than the base diameter resembling the
experimental observation in section 3.1.
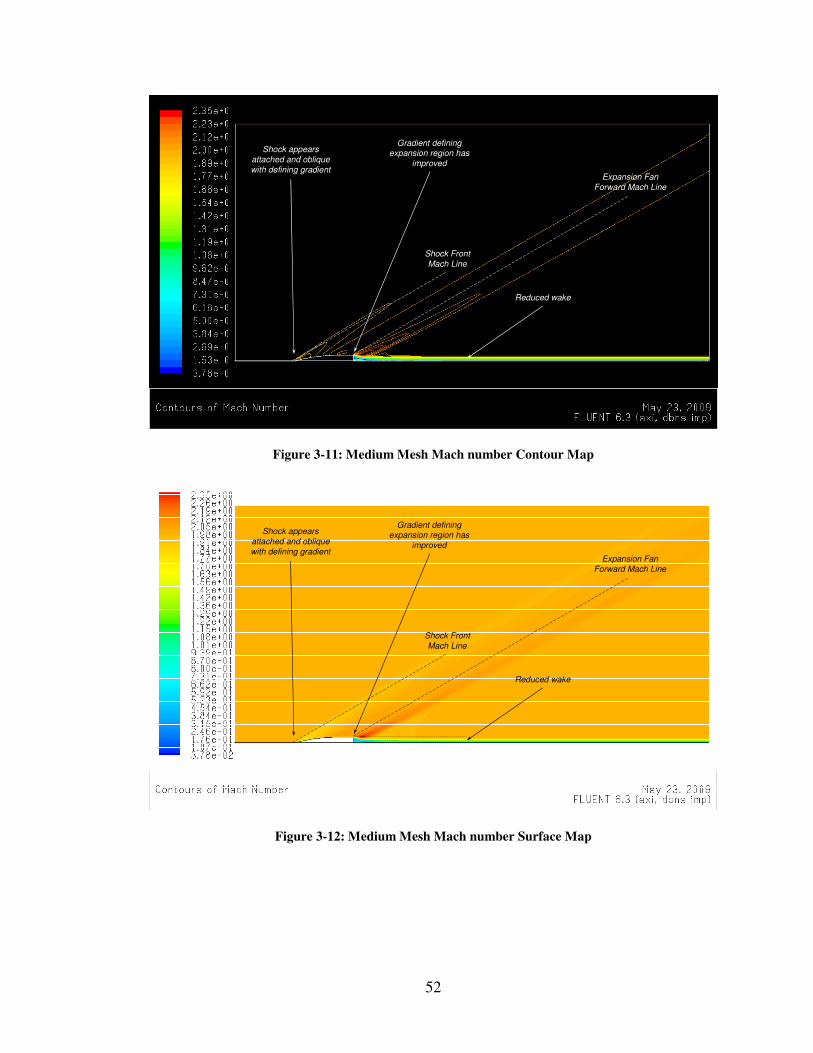
52
NACA Report 1122, No. 24 Shape
Shock appears
attached and oblique
with defining gradient
Gradient defining expansion region has
improved
Shock Front
Mach Line
Expansion Fan
Forward Mach Line
Reduced wake
Figure 3-11: Medium Mesh Mach number Contour Map
Shock appears
attached and oblique
with defining gradient
Gradient defining expansion region has
improved
Shock Front
Mach Line
Expansion Fan
Forward Mach Line
Reduced wake
Figure 3-12: Medium Mesh Mach number Surface Map
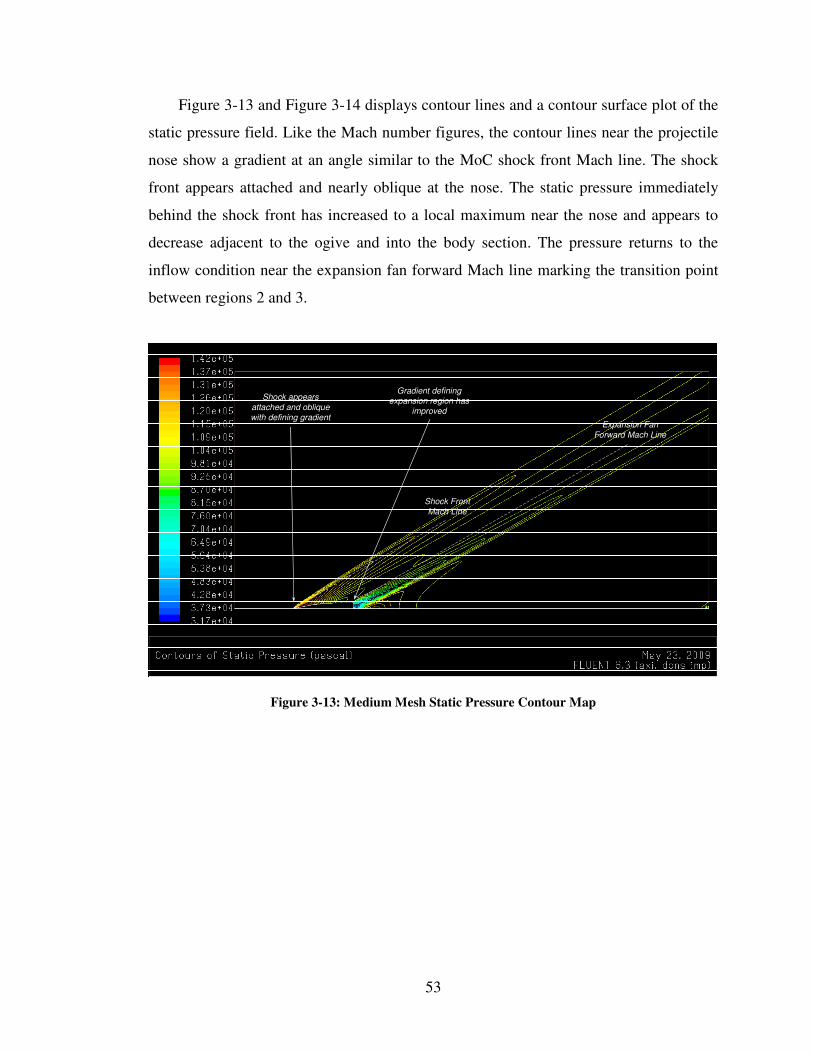
53
Figure 3-13 and Figure 3-14 displays contour lines and a contour surface plot of the
static pressure field. Like the Mach number figures, the contour lines near the projectile
nose show a gradient at an angle similar to the MoC shock front Mach line. The shock
front appears attached and nearly oblique at the nose. The static pressure immediately
behind the shock front has increased to a local maximum near the nose and appears to
decrease adjacent to the ogive and into the body section. The pressure returns to the
inflow condition near the expansion fan forward Mach line marking the transition point
between regions 2 and 3.
Shock appears
attached and oblique
with defining gradient
Gradient defining expansion region has
improved
Shock Front
Mach Line
Expansion Fan
Forward Mach Line
Figure 3-13: Medium Mesh Static Pressure Contour Map
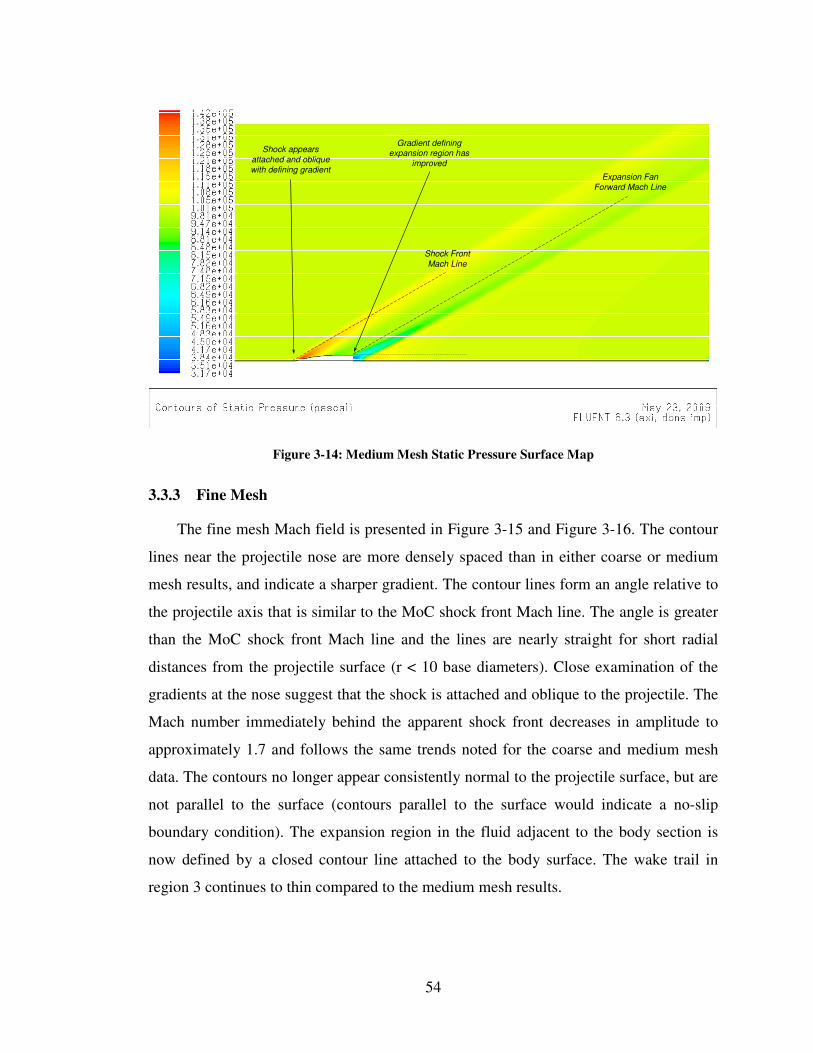
54
Shock appears
attached and oblique
with defining gradient
Gradient defining expansion region has
improved
Shock Front
Mach Line
Expansion Fan
Forward Mach Line
Figure 3-14: Medium Mesh Static Pressure Surface Map
3.3.3 Fine Mesh
The fine mesh Mach field is presented in Figure 3-15 and Figure 3-16. The contour
lines near the projectile nose are more densely spaced than in either coarse or medium
mesh results, and indicate a sharper gradient. The contour lines form an angle relative to
the projectile axis that is similar to the MoC shock front Mach line. The angle is greater
than the MoC shock front Mach line and the lines are nearly straight for short radial
distances from the projectile surface (r < 10 base diameters). Close examination of the
gradients at the nose suggest that the shock is attached and oblique to the projectile. The
Mach number immediately behind the apparent shock front decreases in amplitude to
approximately 1.7 and follows the same trends noted for the coarse and medium mesh
data. The contours no longer appear consistently normal to the projectile surface, but are
not parallel to the surface (contours parallel to the surface would indicate a no-slip
boundary condition). The expansion region in the fluid adjacent to the body section is
now defined by a closed contour line attached to the body surface. The wake trail in
region 3 continues to thin compared to the medium mesh results.
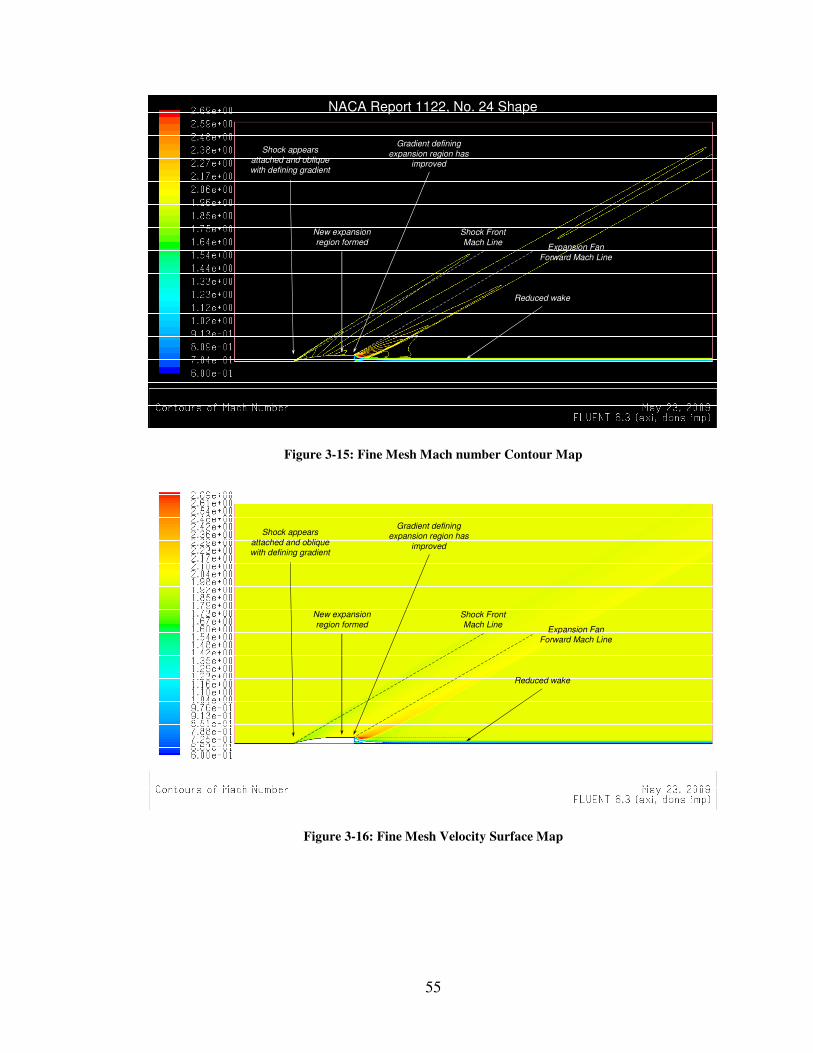
55
NACA Report 1122, No. 24 Shape
Shock appears
attached and obliquewith defining gradient
Gradient defining
expansion region has improved
Shock Front
Mach LineExpansion Fan
Forward Mach Line
Reduced wake
New expansion
region formed
Figure 3-15: Fine Mesh Mach number Contour Map
Shock appears
attached and obliquewith defining gradient
Gradient defining expansion region has
improved
Shock FrontMach Line
Expansion FanForward Mach Line
Reduced wake
New expansion
region formed
Figure 3-16: Fine Mesh Velocity Surface Map
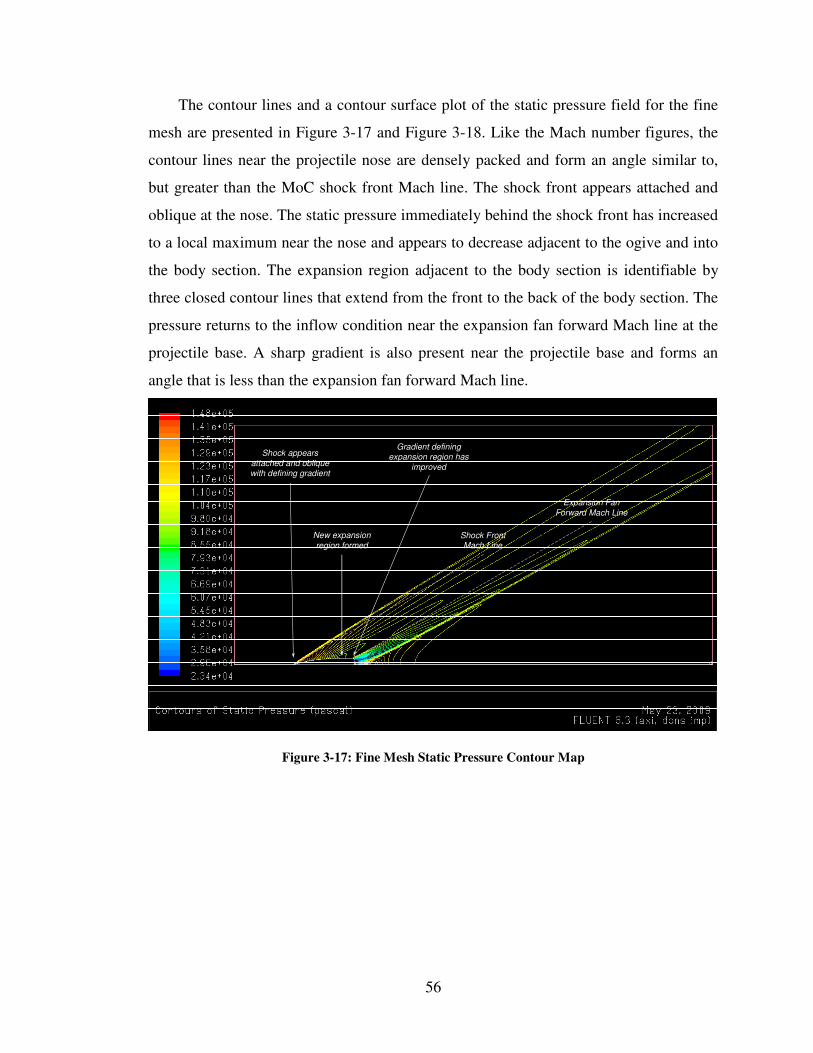
56
The contour lines and a contour surface plot of the static pressure field for the fine
mesh are presented in Figure 3-17 and Figure 3-18. Like the Mach number figures, the
contour lines near the projectile nose are densely packed and form an angle similar to,
but greater than the MoC shock front Mach line. The shock front appears attached and
oblique at the nose. The static pressure immediately behind the shock front has increased
to a local maximum near the nose and appears to decrease adjacent to the ogive and into
the body section. The expansion region adjacent to the body section is identifiable by
three closed contour lines that extend from the front to the back of the body section. The
pressure returns to the inflow condition near the expansion fan forward Mach line at the
projectile base. A sharp gradient is also present near the projectile base and forms an
angle that is less than the expansion fan forward Mach line.
Shock appears
attached and obliquewith defining gradient
Gradient defining expansion region has
improved
Shock FrontMach Line
Expansion Fan
Forward Mach Line
New expansion
region formed
Figure 3-17: Fine Mesh Static Pressure Contour Map
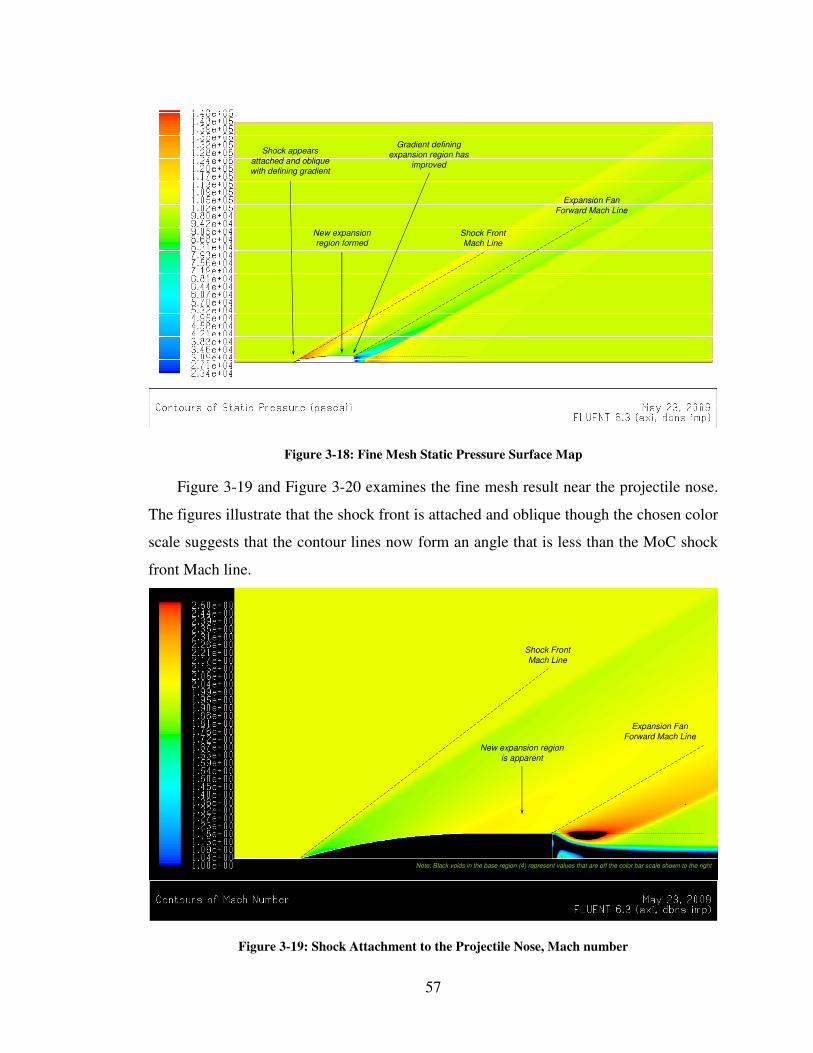
57
Shock appears
attached and obliquewith defining gradient
Gradient defining expansion region has
improved
Shock FrontMach Line
Expansion Fan
Forward Mach Line
New expansionregion formed
Figure 3-18: Fine Mesh Static Pressure Surface Map
Figure 3-19 and Figure 3-20 examines the fine mesh result near the projectile nose.
The figures illustrate that the shock front is attached and oblique though the chosen color
scale suggests that the contour lines now form an angle that is less than the MoC shock
front Mach line.
Shock Front
Mach Line
Expansion Fan
Forward Mach Line
Note: Black voids in the base region (4) represent values that are off the color bar scale shown to the right
New expansion region
is apparent
Figure 3-19: Shock Attachment to the Projectile Nose, Mach number
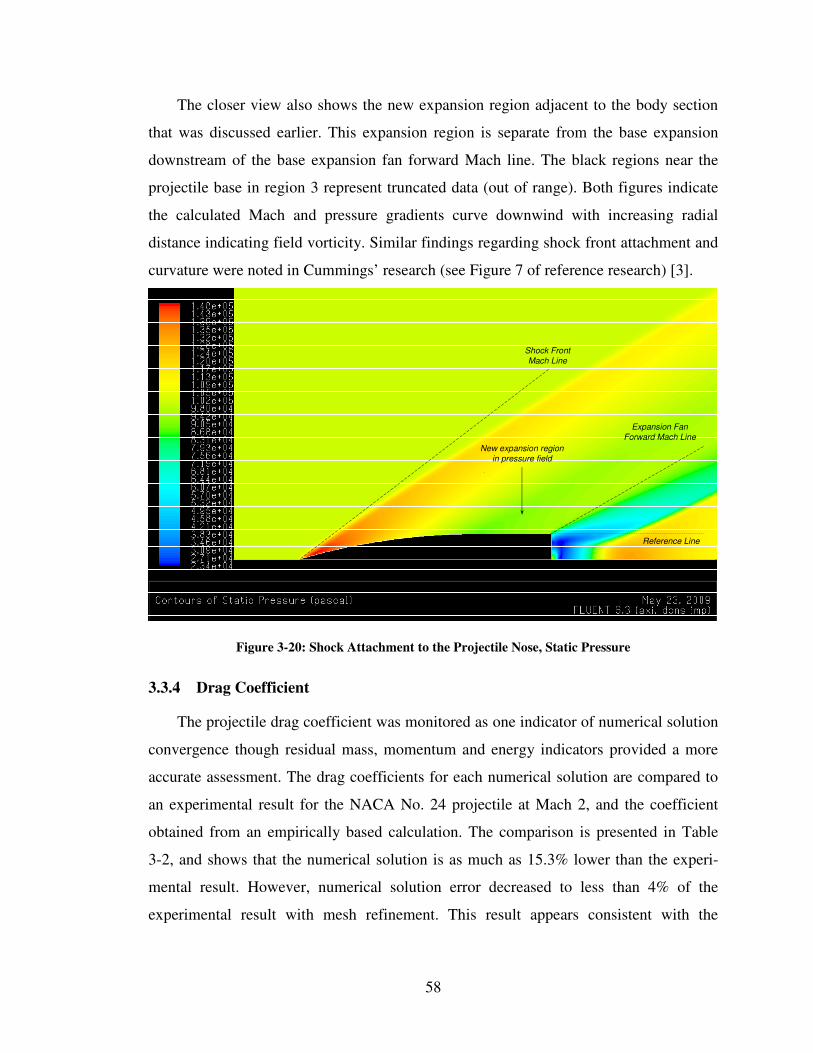
58
The closer view also shows the new expansion region adjacent to the body section
that was discussed earlier. This expansion region is separate from the base expansion
downstream of the base expansion fan forward Mach line. The black regions near the
projectile base in region 3 represent truncated data (out of range). Both figures indicate
the calculated Mach and pressure gradients curve downwind with increasing radial
distance indicating field vorticity. Similar findings regarding shock front attachment and
curvature were noted in Cummings’ research (see Figure 7 of reference research) [3].
Shock Front
Mach Line
Expansion Fan
Forward Mach Line
Reference Line
New expansion region
in pressure field
Figure 3-20: Shock Attachment to the Projectile Nose, Static Pressure
3.3.4 Drag Coefficient
The projectile drag coefficient was monitored as one indicator of numerical solution
convergence though residual mass, momentum and energy indicators provided a more
accurate assessment. The drag coefficients for each numerical solution are compared to
an experimental result for the NACA No. 24 projectile at Mach 2, and the coefficient
obtained from an empirically based calculation. The comparison is presented in Table
3-2, and shows that the numerical solution is as much as 15.3% lower than the experi-
mental result. However, numerical solution error decreased to less than 4% of the
experimental result with mesh refinement. This result appears consistent with the
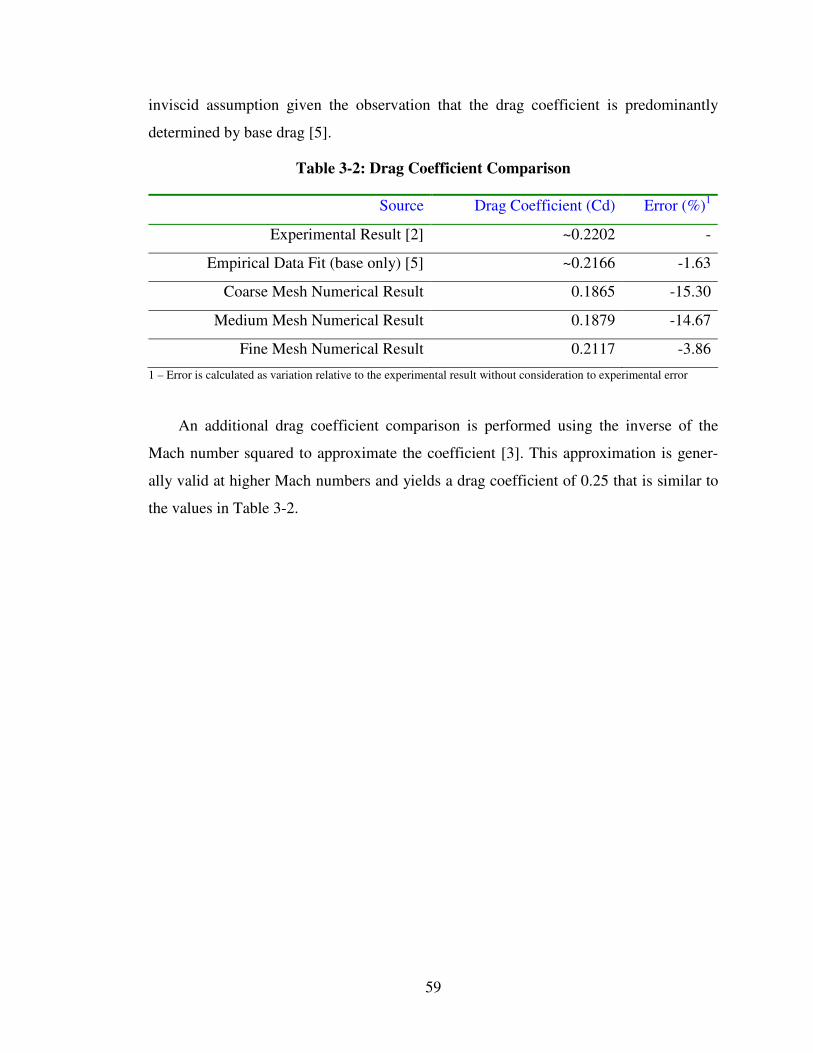
59
inviscid assumption given the observation that the drag coefficient is predominantly
determined by base drag [5].
Table 3-2: Drag Coefficient Comparison
Source Drag Coefficient (Cd) Error (%)1
Experimental Result [2] ~0.2202 -
Empirical Data Fit (base only) [5] ~0.2166 -1.63
Coarse Mesh Numerical Result 0.1865 -15.30
Medium Mesh Numerical Result 0.1879 -14.67
Fine Mesh Numerical Result 0.2117 -3.86
1 – Error is calculated as variation relative to the experimental result without consideration to experimental error
An additional drag coefficient comparison is performed using the inverse of the
Mach number squared to approximate the coefficient [3]. This approximation is gener-
ally valid at higher Mach numbers and yields a drag coefficient of 0.25 that is similar to
the values in Table 3-2.
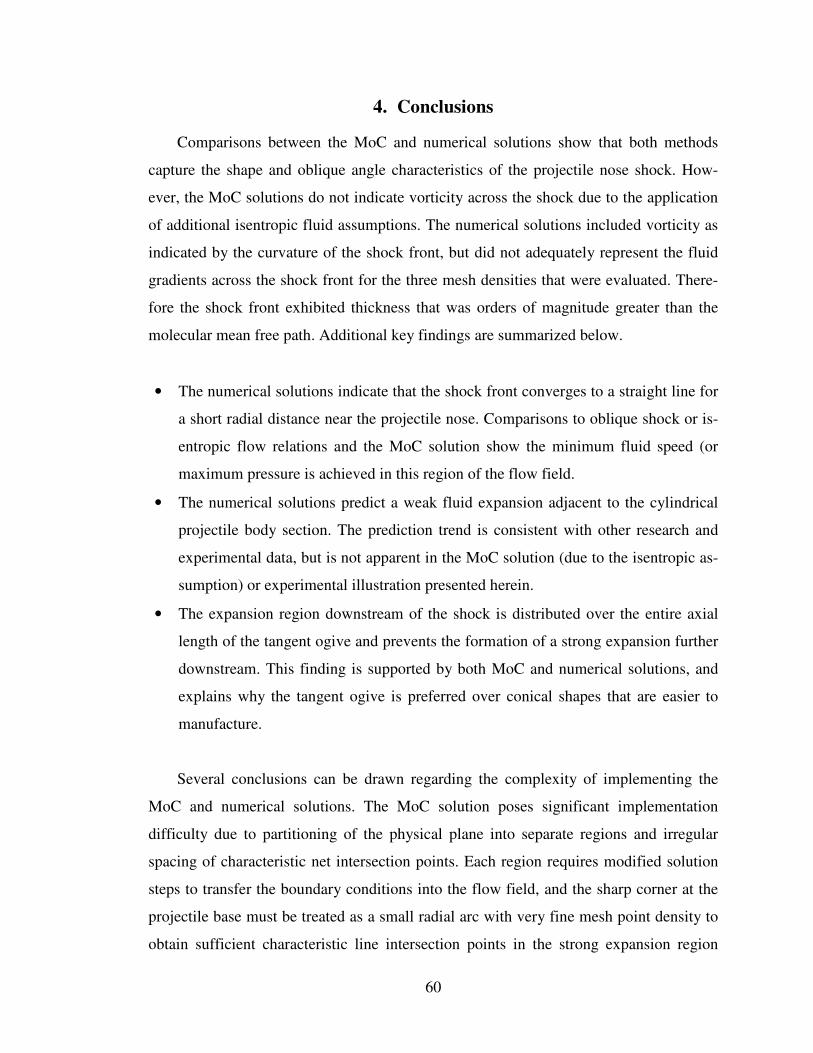
60
4. Conclusions
Comparisons between the MoC and numerical solutions show that both methods
capture the shape and oblique angle characteristics of the projectile nose shock. How-
ever, the MoC solutions do not indicate vorticity across the shock due to the application
of additional isentropic fluid assumptions. The numerical solutions included vorticity as
indicated by the curvature of the shock front, but did not adequately represent the fluid
gradients across the shock front for the three mesh densities that were evaluated. There-
fore the shock front exhibited thickness that was orders of magnitude greater than the
molecular mean free path. Additional key findings are summarized below.
• The numerical solutions indicate that the shock front converges to a straight line for
a short radial distance near the projectile nose. Comparisons to oblique shock or is-
entropic flow relations and the MoC solution show the minimum fluid speed (or
maximum pressure is achieved in this region of the flow field.
• The numerical solutions predict a weak fluid expansion adjacent to the cylindrical
projectile body section. The prediction trend is consistent with other research and
experimental data, but is not apparent in the MoC solution (due to the isentropic as-
sumption) or experimental illustration presented herein.
• The expansion region downstream of the shock is distributed over the entire axial
length of the tangent ogive and prevents the formation of a strong expansion further
downstream. This finding is supported by both MoC and numerical solutions, and
explains why the tangent ogive is preferred over conical shapes that are easier to
manufacture.
Several conclusions can be drawn regarding the complexity of implementing the
MoC and numerical solutions. The MoC solution poses significant implementation
difficulty due to partitioning of the physical plane into separate regions and irregular
spacing of characteristic net intersection points. Each region requires modified solution
steps to transfer the boundary conditions into the flow field, and the sharp corner at the
projectile base must be treated as a small radial arc with very fine mesh point density to
obtain sufficient characteristic line intersection points in the strong expansion region

61
downstream of the projectile. The technique is not easily adapted to operate over a wide
range of fluid dynamic problems for the same reasons. Once implemented, the calcula-
tions are completed in less computation time compared to numerical approaches. The
partial MoC solution consisting of the shock front location, angle of the shock or projec-
tile surface Mach number are obtained with less effort and offer a reasonable measure to
evaluate numerical model mesh adequacy.
The numerical method exhibited different implementation difficulties in that experi-
ence with a broader range of mathematic (numerical) techniques is needed to obtain a
converging solution. Experience demonstrated that convergence is not sufficient to
ensure accurate results, and the analyst may iteratively revise the numerical model mesh
to capture the desired field characteristics. The numerical solution offered a substantial
advantage in terms of completeness since it did not require the isentropic or irrotational
assumption for implementation. Regardless of analysis method used, a comparison to
experimental data is a prudent step toward calculation verification.
Though not a specific objective of this study, it is interesting to note that the nu-
merical solutions calculated a drag coefficient that was only 4% lower than previously
reported experimental data even though viscous effects were neglected. The drag coeffi-
cient is predominantly dependent of the projectile base drag (a fluid region that was not
evaluated with the MoC).
62
5. Areas for Future Work
The supersonic external ballistics problem offers significant challenges with regard
to the estimation of fluid Mach and pressure fields near the projectile. Many of these
challenges could not be addressed in this study and afford areas of future work. Some of
these areas were mentioned in appropriate sections of the study and are summarized
below.
• The pressure fields should be recalculated in terms that are readily compared rather
than the pressure ratio from the MoC solution and the numerical solution static pres-
sure values.
• The MoC solution should be expanded to evaluate flow downstream of the base.
• Further numerical mesh refinements should be implemented to improve the solution
near the projectile nose.
• The solution methods should be expanded to incrementally removed simplifying
assumptions and include viscous effects.
63
6. References
[1] Anderson, J. D. Modern Compressible Flow with Historical Perspective
[ISBN 007-124136-1]. New York: McGraw-Hill, 2003.
[2] Walchner, O. "Systematic Wind Tunnel Measurements on Missiles." National
Advisory Committee for Aeronautics Technical Memorandum No. 1122 (1947): 13.
[3] Cummings, R. M., H. T. Yang, and Y. H. Oh. "Supersonic Turbulent Flow Compu-
tation and Drag Optimization for Axisymmetric Afterbodies." Computers and
Fluids 24, no. 4 (1995): 487-507.
[4] Garibaldi, Javier, Mario Storti, Laura Battaglia, and Jorge D’El´ıa. "Numerical
simulations of the flow around a spinning projectile in subsonic regime." Instituto
de Investigaciones Cient´ıficas y T´ecnicas de las Fuerzas Armadas (CITEFA) Re-
port No. 1040 (2007): 18.
[5] McCoy, Robert L.. "MC Drag - A Computer Program for Estimating the Drag
Coefficients of Projectiles." U.S. Army Armament Research & Development
Command Report No. ARBRL-TR-02293 (1981): 74.
[6] Takakura, Yoko, F. Higashino, S. Ogawa. "Unsteady Flow Computations on a
Flying Projectile within a Ballistic Range." Computers and Fluids 27, No. 5-6
(645-650): 1998.
[7] Department of the Army – Development and Readiness Command (DARCOM),
"LOGISTICS COMPLETE ROUND CHARTS AMMUNITION THROUGH 30
MILLIMETERS." Published May 31, 1984. http://www.fas.org/man/dod-
101/sys/land/docs/p700_3_2.pdf (accessed 16 May 2009).
[8] Hawks, Chuck. "Rifle Ballistics Summary." 2006.
http://www.chuckhawks.com/rifle_ballistics_table.htm (accessed April 24, 2009).
[9] Department of the Army – Army Material Command (AMC), "ARTILLERY
AMMUNITION." Published November 30, 1985. http://www.fas.org/man/dod-
101/sys/land/docs/p700_3_3.pdf (accessed 16 May 2009).
[10] Tannehill J. C., D. A. Anderson, R. H. Pletcher. Computational Fluid Mechanics
and Heat Transfer [ISBN 1-56032-046-X]. Philadelphia: Taylor & Francis, 1997.
[11] Fluent 6.2 User's Manual. Volume 1, Lebannon, NH: Fluent Incorporated, 2005.
[12] Ferri, Antonio. "The Linearized Characteristics Method and Its Application to
Practical Nonlinear Supersonic Problems." National Advisory Committee for Aero-
nautics Technical Memorandum No. 1102 (1952): 18.
64
[13] Griffing, C. W., W. Wilburn, D. Purdon, E. McLaughlin. “An Application of the
Method of Characteristics to Axially Symmetric Supersonic Flow.” California In-
stitute of Technology Thesis (1947): 49.
[14] Ferri, Antonio. "The Method of Characteristics for the Determination of Super-
sonic Flow Over Bodies of Revolution at Small Angles of Attack." National
Advisory Committee for Aeronautics Technical Memorandum No. 1044 (1951): 18.
[15] Ferri, Antonio. “Application of the Method of Characteristics to Supersonic
Rotational Flow.” National Advisory Committee for Aeronautics Technical Memo-
randum No. TR-841 (1946): 12.
[16] Gambit 2.2 Tutorial Guide. Volume 1, Lebannon, NH: Fluent Incorporated, 2004.
[17] Fluent 6.2 Tutorial Guide. Volume 1, Lebannon, NH: Fluent Incorporated, 2005.


















![Numerical simulations of supersonic gas atomization of liquid …42]JJAP-2014... · 2018-01-12 · Numerical simulations of supersonic gas atomization of liquid metal droplets Dudi](https://img.dokumen.tips/doc/110x75/5f1e3400e013ce41984ecccd/numerical-simulations-of-supersonic-gas-atomization-of-liquid-42jjap-2014.jpg)










