Embed Size (px)
Citation preview

Mechanics Research Communications 92 (2018) 21–27
Contents lists available at ScienceDirect
Mechanics Research Communications
journal homepage: www.elsevier.com/locate/mechrescom
Connecting discrete particle mechanics to continuum granular
micromechanics: Anisotropic continuum properties under compaction
Payam Poorsolhjouy
a , Marcial Gonzalez
a , b , ∗
a School of Mechanical Engineering, Purdue University, West Lafayette, IN 47907, USA b Ray W. Herrick Laboratories, Purdue University, West Lafayette, IN 47907, USA
a r t i c l e i n f o
Article history:
Received 14 February 2018
Revised 20 June 2018
Accepted 2 July 2018
Available online 4 July 2018
Keywords:
Granular micromechanics approach
Multiscale modeling
Granular system
Large deformations
Anisotropic continuum properties
a b s t r a c t
A systematic and mechanistic connection between granular materials’ macroscopic and grain level be-
haviors is developed for monodisperse systems of spherical elastic particles under die compaction. The
Granular Micromechanics Approach (GMA) with static assumption is used to derive the stiffness tensor
of transversely isotropic materials, from the average behavior of particle-particle interactions in all dif-
ferent directions at the microscale. Two particle-scale directional density distribution functions, namely
the directional distribution of a combined mechano-geometrical property and the directional distribution
of a purely geometrical property, are proposed and parametrized by five independent parameters. Five
independent components of the symmetrized tangent stiffness tensor are also determined from discrete
particle mechanics (PMA) calculations of nine perturbations around points of the loading path. Finally,
optimal values for these five GMA parameters were obtained by minimizing the error between PMA cal-
culations and GMA closed-form predictions of stiffness tensor during the compaction process. The results
show that GMA with static assumption is effective at capturing the anisotropic evolution of microstruc-
ture during loading, even without describing contacts independently but rather accounting for them in
an average sense.
© 2018 Elsevier Ltd. All rights reserved.
1
a
c
g
a
b
s
g
t
g
t
i
m
d
s
5
g
b
[
[
c
h
t
[
c
b
t
e
e
t
t
a
m
h
0
. Introduction
The macroscopic, or global, mechanical behavior of materials is
direct function of their microstructure and associated microme-
hanical characteristics [1] . This is most clear when dealing with
ranular materials where the microstructure is composed of grains
nd, therefore, their arrangement clearly affects the macroscopic
ehavior. Modeling the behavior of these materials using macro-
copic tensorial continuum mechanics results in an obvious ne-
lect of the effects of the granular microstructure and its evolu-
ion, as well as of micro-mechanical phenomena taking place at
rain scale, on the macroscopic mechanical response.
In order to incorporate microstructural properties of the ma-
erial into its global behavior, many different schemes working
n different spatial scales are available. In the broadest sense, all
odels can be categorized into two distinct groups, namely (i)
iscrete models where, according to the length scale being re-
olved, grains/particles/molecules/atoms are regarded as material’s
∗ Corresponding author at: School of Mechanical Engineering, Purdue University,
85 Purdue Mall, West Lafayette, IN 47907, USA.
E-mail addresses: [email protected] (P. Poorsolhjouy), marcial-
[email protected] (M. Gonzalez).
b
b
c
h
t
ttps://doi.org/10.1016/j.mechrescom.2018.07.001
093-6413/© 2018 Elsevier Ltd. All rights reserved.
uilding blocks (e.g., atomic models [2,3] , molecular-dynamics
4,5] , bead-spring models [6] , dynamic discrete element methods
7,8] and quasi-static particle mechanics approaches [9–13] ); (ii)
ontinuum models where the material point is assumed to be a
omogeneous continuum body whose behavior is interpreted in
erms of tensorial quantities such as stress, strain, and stiffness
14–16] .
Discrete models in principle can be used to derive highly ac-
urate results with high fidelity. Moreover, discrete analysis has
een shown to be an effective approach for modeling material sys-
ems with a discrete nature [17] , even with imperfections [18] , and
ven result in reduced computational demand. These models, how-
ver, rely upon correctly attainable details of material microstruc-
ure and of micro-mechanical phenomena. Continuum models, on
he other hand, derive material response without exact consider-
tion of microstructure and therefore, lack a connection between
acroscopic observable behavior and its microscopic roots.
The Granular Micromechanics Approach (GMA) provides a ro-
ust framework for connecting these two groups of models and
ridges the gap between them. This is achieved by deriving such
ontinuum macroscopic response from the study of average be-
avior of particle-particle interactions in all different directions at
he microscale [19–22] . In doing so, GMA delivers the most cru-

22 P. Poorsolhjouy, M. Gonzalez / Mechanics Research Communications 92 (2018) 21–27
W
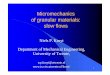
Fig. 1. Two grains in contact and the local coordinate system along with the global
Cartesian and spherical coordinate systems.
d
w
p
a
s
b
n
c
m
c{
w
b
a
2
a
u
i
t
b
r
i
p
t
p
p
i
p
r
N
p
cial advantages of discrete models, i.e., it incorporates material’s
micromechanical features, microstructural effects, and load-path
dependent anisotropic evolution of microstructure, while avoiding
the comparatively large computational cost associated with identi-
fying and following each and every particle as well as their con-
tacts. It is worth noting that grain-pair interactions in GMA do not
represent the behavior of two isolated grains, but rather, that of
a grain-pair embedded in the granular microstructure. The global
anisotropic continuum behavior of the granular material is then
derived from the effective and directional behavior of grain-pair
interactions. Therefore, the most critical element in deriving a pre-
dictive GMA model of any given material is formulating force-
displacement relationships for grain-pair interactions.
In this communication, we address the issue of formulating
particle-particle interactions, and their anisotropic evolution, dur-
ing die compaction of a monodisperse system of spherical elas-
tic particles. We focus on developing a systematic and mechanis-
tic approach for identifying these relationships from discrete par-
ticle mechanics simulations of the granular system. The proposed
methodology, therefore, effectively connects discrete particle me-
chanics to continuum granular micromechanics. Next, we briefly
describe the GMA with static assumption adopted in this work.
2. GMA with static assumption
The GMA can take two general approaches, namely the method
with a kinematic constraint and that with a static constraint. The
approach with a kinematic constraint is based on the assump-
tion that inter-particle displacements δi ∈ V can be derived as the
projection of macroscopic strain tensor εi j ∈ V 2 on the particle-
particle relative position l i ∈ V, i.e., δi = εi j l j . On the other hand,
the approach with static constraint assumes a relationship be-
tween macroscopic stress tensor σi j ∈ V 2 and inter-particle force
vectors f i ∈ V . Here V is a three-dimensional real vector space.
The GMA with static assumption enforces the kinematic con-
straint in a weak sense, that is
εpq = arg min
εpq ∈V 2
N c ∑
α=1
∥∥δαi − εi j l
αj
∥∥ (1)
where N c denotes the total number of contacts α in the represen-
tative volume element. Therefore, GMA with static constraint min-
imizes the sum, over all contacts, of the residual differences be-
tween the inter-particle displacement and the projection of macro-
scopic strain tensor on the vector joining centroids of the particles
forming pair-contacts. Furthermore, the Principle of Virtual Work
stating the equality of macroscopic strain energy density and the
volume average of inter-particle energies of all contacts is enforced
= σi j εi j =
1
V
N c ∑
α=1
f αi δαi (2)
where V is the volume of the representative volume element. Sub-
stituting (1) into (2) yields the following relationship between
macroscopic stress tensor and microscopic inter-particle forces
f i = σi j N
−1 jq
l q ; with N i j =
1
V
N c ∑
α=1
l αi l αj (3)
where N i j ∈ V 2 is the second rank fabric tensor. The above relation-
ship is commonly known as the static constraint, hence the name
of the method. With some algebraic manipulation, the following
expressions for macroscopic compliance, S i jkl ∈ V 4 , and strain, εi j ∈V 2 , tensors are obtained
S i jkl =
∂εi j
∂σkl
= N
−1 jp
N
−1 lq
1
V
N c ∑
α=1
s αik l αp l
αq (4a)
εi j = S i jkl d σkl (4b)
here s αi j
∈ V 2 is the local compliance tensor connecting inter-
article force and displacement of contact α, that is δαi
= s αi j
f αj
. For
more detailed description of the above formulation see [23] .
For convenience, the inter-particle force-displacement relation-
hip f αi (δα
j ) can be formulated in a local coordinate system defined
y the following three mutually orthogonal axes: one normal axis
αi
in the direction of the vector joining the centroids of the parti-
les, and two tangential axes s αi
and t αi
(see Fig. 1 ). Therefore, the
icroscopic constitutive relationship can be expressed on the local
oordinate systems as follows
δαn
δαs
δαt
}
=
[
s αn 0 0
0 s αs 0
0 0 s αt
] {
f αn f αs f αt
}
(5)
here the local compliance tensor is assumed to be symmetric
y neglecting cross-coupling terms and thus s αn = 1 /k αn , s αs = 1 /k αs ,
nd s αt = 1 /k αt are the reciprocals of the local stiffness coefficients.
.1. Integral form of the formulation
It bears emphasis that the relationships given in Eqs. (1) –(4)
re in summation form over all pair-interactions within the gran-
lar system that constitutes the representative volume element of
nterest. However, both the inter-particle force-displacement rela-
ionships and geometrical properties, such as the relative distance
etween interacting particles, depend strongly on direction with
espect to a reference frame. It is then convenient to derive an
ntegral form of the constitutive relationship by defining two
article-scale directional density distribution functions, namely
he directional distribution of a combined mechano-geometrical
roperty and the directional distribution of a purely geometrical
roperty [24] . In this formulation, for convenience, a global spher-
cal coordinate system is utilized wherein θ , φ, and ρ denote the
olar zenith angle, the azimuth angle, and the radial coordinate,
espectively (see Fig. 1 ). Specifically, for defining the fabric tensor
ij in integral form, a directional distribution ξ ′ ( θ , φ) of the
article-particle relative distance squared, i.e., of || l || 2 , is proposed

P. Poorsolhjouy, M. Gonzalez / Mechanics Research Communications 92 (2018) 21–27 23
a
w
i
b
S
f
p
s
ξ
T
s
S
w
p
s
c
i
t
ξ
w
m
p
a
f
N
i
S
o
o
f
c
d
2
d
t
r
p
b
m
a
v
a
N
w
E
f
a
m
t
S
w
p
r
T
w
p
a
b
a
p
m
a
t
m
a
t
f
l
r
t
c
3
o
l
i
s
r
q
c
t
i
s follows
N i j = l 2 ρc
∫ π
θ=0
∫ 2 π
φ=0
n i n j ξ′ ( θ, φ) sin θdθdφ;
with ξ ′ ( θ, φ) =
∑
ρ∈P θφ
|| l ρ || 2 / N c ∑
α=1
|| l α|| 2 (6)
here l , ρc = N c /V and P θφ denote the scalar values of average
nter-particle length, the volume density of contacts in the assem-
ly, and the subset of contacts in direction ( θ , φ), respectively.
imilarly, for defining the local compliance tensor s ij in integral
orm, a directional distribution of combined mechano-geometrical
roperties s n || l || 2 , s s || l ||
2 and s t || l || 2 —all assumed the same for
implicity—is proposed as follows
( θ, φ) =
∑
ρ∈P θφ
(s ρn || l ρ || 2
)/
N c ∑
α=1
(s αn || l α|| 2 )
=
∑
ρ∈P θφ
(s ρs || l ρ || 2
)/
N c ∑
α=1
(s αs || l α|| 2 )
=
∑
ρ∈P θφ
(s ρt || l ρ || 2
)/
N c ∑
α=1
(s αt || l α|| 2 ) (7)
herefore, the macroscopic compliance tensor in integral form
implifies to
i jkl = l 2 ρc N
−1 jp
N
−1 lq
∫ π
θ=0
∫ 2 π
φ=0
s ik n p n q ξ ( θ, φ) sin θdθdφ (8)
here s ik is the average local compliance tensor which can be ex-
ressed in local coordinates as s = s n n � n + s s s � s + s t t � t , with
n , s s and s t denoting the reciprocal of the average local stiffness
oefficients k n , k s and k t , respectively. Finally, spherical harmonics,
n terms of Legendre polynomials, are utilized for defining these
wo directional probability distribution functions, i.e.,
(θ, φ) =
1
4 π
{1 +
∞ ∑
k =2
′ [
a k 0 P k ( cos θ )
+
∞ ∑
m =1
P m
k ( cos θ ) (a km
cos mφ + b km
sin mφ)] }
(9)
here the summation over k , represented by �′ , denotes sum-
ation over even values of k, P k (cos θ ) is the k th order Legendre
olynomial with respect to cos θ , while P m
k ( cos θ ) is its m th
ssociated Legendre function. Parameters a k 0 , a km
, and b km
are
abric parameters governing the shape of the distribution function.
ote that the relationship for ξ ′ will be identical to that presented
n Eq. (9) , but will use a ′ k 0
, a ′ km
, and b ′ km
as fabric parameters.
ince Legendre polynomials and their associated functions are all
rthogonal to one, the integral of both ξ and ξ ′ over the surface
f a unit sphere is identical to unity, regardless of the number of
abric parameters used and their representation. This property is
onsistent with the definition of the two directional probability
istribution functions given in Eqs. (6) and (7) .
.2. Transversely isotropic materials
The mechanical response of isotropic materials is identical in all
irection; therefore, the directional distribution of contact proper-
ies can be adopted constant in all directions and thus the fab-
ic parameters in ξ and ξ ′ are equal to 0. In addition, the inter-
article stiffness coefficients in the two tangential directions can
e assumed equal to each other, i.e., k s = k t .
In contrast, the mechanical response of transversely isotropic
aterials is independent of φ, but depends on θ , and thus only
k 0 and a ′ k 0
are different from 0. The fabric tensor N ij for a trans-
ersely isotropic material derived from Eq. (6) using all even terms
′ k 0
simplifies to
i j =
l 2 ρc
15
[
5 − a ′ 20 0 0
0 5 − a ′ 20 0
0 0 5 + 2 a ′ 20
]
(10)
here only the dependency on a ′ 20
emerges. Similarly, using
qs. (8) and (9) with all even terms a k 0 , the compliance tensor S ijkl
or a transversely isotropic material retains a dependency only on
20 and a 40 . It is worth noting then that the components of the
acroscopic stiffness tensor C ijkl , and of its inverse S ijkl , are func-
ions of only 5 parameters, i.e.,
−1 i jkl
= C i jkl = C i jkl
(l 2 ρc k n , l
2 ρc k s , a 20 , a 40 , a ′ 20
)(11)
here k s = k t is assumed. Specifically, the five independent com-
onents of the compliance tensor of a transversely isotropic mate-
ial can be derived in closed-form as follows
S 11 =
15
7(a ′ 20
− 5) 2
(21 − 6 a 20 + a 40
k n l 2 ρc +
14 − a 20 − a 40
k s l 2 ρc
)S 33 =
5
7(2 a ′ 20
+ 5) 2
(63 + 36 a 20 + 8 a 40
k n l 2 ρc +
42 + 6 a 20 − 8 a 40
k s l 2 ρc
)S 44 =
5
7(a ′ 20
− 5) 2 (2 a ′ 20
+ 5) 2
((a ′ 20 + 10) 2
21 + 3 a 20 − 4 a 40
k n l 2 ρc +
126(25 + 5 a ′ 20 + 4 a ′ 2 20 ) + 45(5 − 20 a ′ 20 − a ′ 2 20 ) + 4 a 40 (10 + a ′ 20 ) 2
k s l 2 ρc
)S 12 =
5
7(a ′ 20
− 5) 2 ( 21 − 6 a 20 + a 40 )
k s − k n
k n k s l 2 ρc
S 13 =
−5
7(a ′ 20
− 5)(2 a ′ 20
+ 5) ( 21 + 3 a 20 − 4 a 40 )
k s − k n
k n k s l 2 ρc
(12)
hese five independent components of the compliance tensor—
ith S 66 = 2 ( S 11 − S 12 ) —are obtained from the fourth order com-
liance tensor by symmetrizing its components in the form of
6 × 6 matrix [25] . The macroscopic compliance tensor captures
oth the inherent and loading-induced anisotropies automatically
nd at a minimal increase in computational demand—cf. discrete
article mechanics simulations, e.g. [12] . The trade-off between a
odeling approach which is fully descriptive at the particle scale
nd a modeling approach which is descriptive in an average direc-
ional sense is favorable when the macroscopic behavior is of pri-
ary interest [26] . In this study, we seek to derive the evolution of
verage inter-particle stiffness coefficients, k n and k s , as well as of
he directional distribution of contact properties, characterized by
abric parameters a 20 , a 40 and a ′ 20
, during a conventional triaxial
oading process such as die compaction of granular systems up to
elative densities close to 1, or porosities close to 0. We propose
o achieve this goal by connecting discrete particle mechanics to
ontinuum granular micromechanics.
. Connecting discrete to continuum
In this study, we restrict attention to a monodisperse packing
f elastic spherical grains, located in a box with a square base and
oaded under die-compaction conditions, i.e., under triaxial load-
ng. We adopt a particle mechanics approach (PMA) which de-
cribes each individual particle in the packing, and the collective
earrangement and deformation of the particles that result in a
uasi-statically compacted specimen [9–11] . The loading conditions
onsist of applying a vertical displacement to the upper wall of
he confining box (i.e., applying a macroscopic ε33 ) while keep-
ng the lateral walls unperturbed (i.e., enforcing a macroscopic

24 P. Poorsolhjouy, M. Gonzalez / Mechanics Research Communications 92 (2018) 21–27
Fig. 2. Deformed three-dimensional packing at three different stages: (left) unload state ( ε33 = 0 and relative density ρ = 0 . 58 ), (middle) intermediate stage ( ε33 = 26% and
relative density ρ = 0 . 89 ), and (right) fully compaction stage ( ε33 = 41% and relative density ρ = 0 . 99 ).
Fig. 3. Stress-strain curves determined from the evolution of the internal strain en-
ergy density and from particle-wall interactions of particle mechanics simulations.
W
Fig. 4. Evolution of stiffness components during compaction. Numerical results ob-
tained from the PMA (solid lines) compared to GMA results using the set of 5 best-
fitted parameters (symbols).
w
p
f
r
a
s
m
e
s
e
s
t
t
t
c
d
d
c
p
d
a
a
c
s
C2222 3333 2323 1313 1212
ε11 = ε22 = 0 ). We use the Hertz contact theory for elastic spheri-
cal particles [27] , and thus the contact force F between two identi-
cal spherical particles with radius R , elastic modulus of E and Pois-
son’s ratio of ν , is given by
F = n H (γ ) 3 / 2 + where n H = E(2 R ) 1 / 2 / 3(1 − ν2 ) (13)
where γ represents the relative displacement between centroids
of two particles in contact and (·) + = max {·, 0 } . We specifically
study a noncohesive frictionless granular system comprised of
7,357 weightless spherical particles with radius R = 250 μm and
elastic properties E = 7 GPa, ν = 0 . 30 (see Fig. 2 ). Due to the elastic
nature of the particles, at a given macroscopic strain εt , the total
internal strain energy density of the system is then given by the
volume average of the inter-particle energies, for which a close-
form solution is attainable
t =
1
V t
N c ∑
α=1
(∫ F αd γ α
)=
1
V t
N c ∑
α=1
2
5
n H (γα) 5 / 2 +
where V t is the packing volume in the current configuration t ,
while F α and γ α represent the inter-particle force and displace-
ments.
Fig. 3 shows the stress in the direction of compaction, σ 33 , de-
termined from the particle-wall interactions of PMA simulations
(i.e., the sum of particle-wall forces divided by the wall area), and
from the evolution of the total internal strain energy density in the
packing, i.e.,
σ t 33 =
d W
d ε=
W
t ′ − W
t
d ε(14)
33 33
here W
t ′ corresponds to the strain energy density of the packing
erturbed by d ε33 . It is evident from the figure that there is per-
ect agreement between the two results, which confirms the cor-
ect definition of work conjugates.
Due to the symmetries in the initial random packing, as well
s the symmetry in the applied load during compaction, it is as-
umed that the discrete packing behaves as a transversely isotropic
aterial. Next, we focus on deriving, from PMA simulations, the
volution of all five independent components of the stiffness ten-
or C ij during die compaction and, subsequently, we identify the
volution of five GMA parameters which describe the same macro-
copic material behavior. In order to calculate the components of
he stiffness tensor, at every loading step t during compaction, per-
urbations in different strain components, d ε ij , are applied using
he PMA and the change of stored strain energy density, d W , is
alculated. Furthermore, for every perturbation at loading step t ,
W can be written in terms of the tangent stiffness tensor C t i jkl
as
W = W
t ′ − W
t = σ t i j d εi j +
1
2
d εi j C t i jkl d εkl (15)
In order to calculate all elements of the stiffness tensor, 9
ombinations of small perturbations in the strain tensor are ap-
lied to the packing. These perturbations include applying six uni-
irectional strains, namely d ε11 , d ε22 , d ε33 , d ε23 , d ε13 , and d ε12 ,
nd three combinations of d ε11 and d ε22 , d ε11 and d ε33 , and d ε22
nd d ε33 . After calculating the variation of strain energy density
aused by these perturbations, all 9 nonzero components of the
tiffness tensor, namely three normal diagonal components ( C 1111 ,
and C ), three shear components ( C , C and C ),

P. Poorsolhjouy, M. Gonzalez / Mechanics Research Communications 92 (2018) 21–27 25
Fig. 5. Evolution of the optimized GMA parameters during compaction. Left: mechano-geometrical coefficients l 2 ρc k n and l 2 ρc k s . Right: fabric parameters a 20 , a 40 and a ′ 20 .
a
m
F
c
a
o
i
p
s
z
i
c
t
s
i
i
t
i
c
n
u
m
t
fi
c
v
s
i
a
a
s
w
f
e
t
i
s
d
d
4
d
t
i
s
Fig. 6. Directional probability distribution functions ξ (right) and ξ ′ (left) at three
different stages of compaction: (top) unload state ( ε33 = 0 and relative density ρ =
0 . 58 ), (middle) intermediate stage ( ε33 = 26% and relative density ρ = 0 . 89 ), and
(bottom) fully compaction stage ( ε33 = 41% and relative density ρ = 0 . 99 ).
d
c
t
nd three coupling components ( C 1122 , C 1133 and C 2233 ) are deter-
ined by solving a linear system of 9 equations and 9 unknowns.
ig. 4 shows the evolution of symmetrized stiffness components
alculated using the system of equations derived by applying the
bove perturbations and solving Eq. (15) . It is important to point
ut that the three coupling components of stiffness tensor, i.e., the
n-plane coupling C 1122 and the coupling between vertical and in-
lane directions C 1133 and C 2233 , are almost equal. Moreover, it is
een that the shear stiffness of the packing remains very close to
ero throughout compaction.
Finally, the GMA parameters needed for modeling transversely
sotropic materials, i.e., l 2 ρc k n , l 2 ρc k s , a 20 , a 40 , and a ′ 20
, are cal-
ulated by solving an optimization problem aimed at best fitting
he components of the macroscopic stiffness tensor. Closed-form
olutions for components of the stiffness tensor are obtained by
nverting the closed-form solution of the compliance tensor given
n Eq. (12) . Fig. 4 shows the evolution of stiffness components ob-
ained by using the best-fitted GMA parameters. It is worth not-
ng that the optimization problem is subjected to the inequality
onstraint of positive ξ ( a 20 , a 40 ) and ξ ′ (a ′ 20 ) in all directions and,
aturally, of positive l 2 ρc k n and l 2 ρc k s . It is evident from the fig-
re that the GMA analysis accurately predicts the evolution of the
acroscopic stiffness components from micromechanical parame-
ers, even up to full compaction (or relative density ρ = 1 ) where
nite macroscopic deformations occur. However, there is some dis-
repancy in the fitting of the shear modulus and a more clear in-
estigation of packing size effects, boundary effects, and GMA as-
umptions is desirable, if beyond the scope of this study.
Evolution of the optimized GMA parameters during compaction
s shown in Fig. 5 . The mechano-geometrical coefficients l 2 ρc k n nd l 2 ρc k s , i.e., the product of contacts volume density ρc , aver-
ge contact length squared l 2 and stiffness coefficients k n and k s ,
how a smooth and monotonically ascending behavior, consistent
ith the stiffening of the granular material seen in Fig. 4 . The
abric parameters a 20 and a 40 also show monotonic behavior but
xhibit a clear asymptotic trend towards −0 . 50 and 2.00, respec-
ively; whereas the a ′ 20
shows a monotonically increasing behav-
or. Fig. 6 shows that these values for the fabric parameters en-
ure that the directional distribution functions are positive in all
irections. The figure also shows that the directional probability
istribution of l 2 ρc / k n and l 2 ρc / k s , i.e., ξ ( θ , φ), has its minimum at
5 ° which indicates that stronger contacts are formed at directions
iagonal to the direction of compaction—which is consistent with
he three-dimensional deformed packing depicted in Fig. 2 . Also
mportant to note, is the fact that even though the particles them-
elves are frictionless, i.e. the contact between particles do not pro-
fiuce any type of shear force, still in order for the micromechani-
al continuum theory (GMA) to reproduce the packing’s stiffness
ensor, the method requires a nonzero average shear stiffness coef-
cient k s . This emphasizes the fact that the inter-particle stiffness

26 P. Poorsolhjouy, M. Gonzalez / Mechanics Research Communications 92 (2018) 21–27
[
[
[
[
[
coefficients used in GMA, k n and k s , do not represent the stiffness
of two isolated particles in contact. They rather represent, in a sta-
tistical average sense, the stiffness of between two particles that
are embedded in the material’s (or packing’s) microstructure.
4. Concluding remarks
The connection between the discrete behavior of a three-
dimensional packing of elastic, spherical particles and its granular
continuum behavior under quasi-static die-compaction was stud-
ied. Discrete PMA simulations, with Hertzian contact interactions,
were used to inform a GMA continuum model that incorporates
the directional distribution of inter-particle contact properties in
an average sense. Specifically, the GMA with static assumption was
effectively used in this work. A closed-form solution for the stiff-
ness tensor C ijkl of transversely isotropic materials was derived us-
ing 5 GMA parameters, namely two mechano-geometrical coeffi-
cients l 2 ρc k n and l 2 ρc k s , and three fabric parameters associated to
two independent directional density distribution functions ξ ( a 20 ,
a 40 ) and ξ ′ (a ′ 20
) —as theoretically demonstrated in [24] . In addition,
a robust methodology for computing 5 independent components of
the tangent stiffness tensor of the transversely isotropic granular
assembly using PMA calculations of perturbations around a load-
ing step of interest was presented. Optimal values for the 5 GMA
parameters were obtained by minimizing the error between PMA
calculations and GMA predictions of stiffness tensor during com-
paction process. The results show that GMA with static assumption
is capable of effectively capturing the anisotropic evolution of mi-
crostructure during loading, even without describing contacts in-
dependently but rather accounting for them in an average sense.
It is worth noting that these results suggest a one-to-one map-
ping between the 5 independent stiffness components of trans-
versely isotropic materials with 5 independent GMA parameters
which describe directional distribution of mechano-geometrical
and of solely geometrical parameters. The functional dependency
of these 5 GMA parameters with loading-path and macroscopic
state variables remains elusive, but is of paramount importance for
applying the GMA, informed by true mechanical and morphologi-
cal properties of the granular system, to other general loading con-
ditions. We believe the methodology presented in this work paves
the way for addressing this challenge and, in turn, for exploring
a large range of applications in various fields, including concrete
[28–31] , pharmaceutical [32–34] , biological applications [35,36] ,
wave propagation analysis [22,37] , and explosive and energetic
[38,39] materials which may favor from both detailed particle-scale
mechanistic models but also from reduced-order models for man-
ufacturing purposes [40] .
Acknowledgments
The authors gratefully acknowledge the support received from
the National Science Foundation grant number CMMI-1538861 and
from Purdue University’s startup funds. M.G. also acknowledges
the U.S. Air Force Office of Scientific Research for support through
Award No. FA9550-15-1-0102 and the project’s program managers
Dr. Martin Schmidt and Dr. Jennifer Jordan.
Supplementary material
Supplementary material associated with this article can be
found, in the online version, at doi: 10.1016/j.mechrescom.2018.07.
001 .
References
[1] C.S. Chang , A. Misra , Packing structure and mechanical properties of granu-
lates, J. Eng. Mech. 116 (5) (1990) 1077–1093 .
[2] C. Dharmawardhana , A. Misra , W.-Y. Ching , Quantum mechanical metric for in-ternal cohesion in cement crystals, Sci. Rep. 4 (2014) 7332 .
[3] R.J.-M. Pellenq , A. Kushima , R. Shahsavari , K.J. Van Vliet , M.J. Buehler , S. Yip ,F.-J. Ulm , A realistic molecular model of cement hydrates, Proc. Natl. Acad. Sci.
106 (38) (2009) 16102–16107 . [4] T. Hansson , C. Oostenbrink , W. van Gunsteren , Molecular dynamics simula-
tions, Curr. Opin. Struct. Biol. 12 (2) (2002) 190–196 . [5] S. Masoumi , H. Valipour , M.J. Abdolhosseini Qomi , Intermolecular forces be-
tween nanolayers of crystalline calcium-silicate-hydrates in aqueous medium,
J. Phys. Chem. C 121 (10) (2017) 5565–5572 . [6] A. Milchev , K. Binder , Static and dynamic properties of adsorbed chains at sur-
faces: monte carlo simulation of a bead-spring model, Macromolecules 29 (1)(1996) 343–354 .
[7] H. Zhu , Z. Zhou , R. Yang , A. Yu , Discrete particle simulation of particulate sys-tems: a review of major applications and findings, Chem. Eng. Sci. 63 (23)
(2008) 5728–5770 .
[8] F.V. Donzé, V. Richefeu , S.-A. Magnier , Advances in discrete element methodapplied to soil, rock and concrete mechanics, Electron. J. Geotech. Eng. 8 (1)
(2009) 44 . [9] M. Gonzalez , A.M. Cuitiño , A nonlocal contact formulation for confined granu-
lar systems, J. Mech. Phys. Solids 60 (2) (2012) 333–350 . [10] M. Gonzalez , A.M. Cuitiño , Microstructure evolution of compressible granular
systems under large deformations, J. Mech. Phys. Solids 93 (2016) 44–56 .
[11] B. Yohannes , M. Gonzalez , A. Abebe , O. Sprockel , F. Nikfar , S. Kiang , A. Cuitiño ,Evolution of the microstructure during the process of consolidation and bond-
ing in soft granular solids, Int. J. Pharm. 503 (1) (2016) 68–77 . [12] M. Gonzalez , P. Poorsolhjouy , A. Thomas , J. Liu , K. Balakrishnan , Statistical char-
acterization of microstructure evolution during compaction of granular sys-tems composed of spheres with hardening plastic behavior, Mechanics Re-
search Communications (2018) under review .
[13] G. Cusatis , D. Pelessone , A. Mencarelli , Lattice discrete particle model (ldpm)for failure behavior of concrete. i: theory, Cem. Concr. Compos. 33 (9) (2011)
881–890 . [14] J. Lubliner , J. Oliver , S. Oller , E. Onate , A plastic-damage model for concrete,
Int. J. Solids Struct. 25 (3) (1989) 299–326 . [15] R.E. Miller , A continuum plasticity model for the constitutive and indentation
behaviour of foamed metals, Int. J. Mech. Sci. 42 (4) (20 0 0) 729–754 .
[16] J. Chaboche , A review of some plasticity and viscoplasticity constitutive theo-ries, Int. J. Plast. 24 (10) (2008) 1642–1693 .
[17] E. Turco , F. Dell?Isola , A. Cazzani , N.L. Rizzi , Hencky-type discrete model forpantographic structures: numerical comparison with second gradient contin-
uum models, Zeitschrift für angewandte Mathematik und Physik 67 (4) (2016)85 .
[18] E. Turco , N.L. Rizzi , Pantographic structures presenting statistically distributed
defects: numerical investigations of the effects on deformation fields, Mech.Res. Commun. 77 (2016) 65–69 .
[19] A. Misra , R. Parthasarathy , V. Singh , P. Spencer , Micro-poromechanics modelof fluid-saturated chemically active fibrous media, ZAMM-J. Appl. Math.
Mech./Zeitschrift für Angewandte Mathematik und Mechanik 95 (2) (2015)215–234 .
[20] A. Misra , V. Singh , Micromechanical model for viscoelastic materials undergo-ing damage, Continuum Mech. Thermodyn. 25 (2–4) (2013) 343–358 .
[21] P. Poorsolhjouy , A. Misra , Effect of intermediate principal stress and loading–
path on failure of cementitious materials using granular micromechanics, Int.J. Solids Struct. 108 (2017) 139–152 .
22] A. Misra , P. Poorsolhjouy , Granular micromechanics based micromorphicmodel predicts frequency band gaps, Continuum Mech. Thermodyn. 28 (1–2)
(2016) 215 . 23] A. Misra , P. Poorsolhjouy , Micro-macro scale instability in 2d regular granular
assemblies, Continuum Mech. Thermodyn. 27 (1–2) (2015) 63 .
[24] A. Misra , P. Poorsolhjouy , Granular micromechanics model of anisotropic elas-ticity derived from gibbs potential, Acta Mech. 227 (5) (2016) 1393 .
25] L.E. Malvern , Introduction to the Mechanics of a Continuous Medium, Prentice-Hall, 1969 .
26] J.H. Weiner , Statistical Mechanics of Elasticity, Courier Corporation, 2012 . [27] S.P. Timoshenko , J. Goodier , Theory of Elasticity, McGraw-Hill, 1970 .
[28] J.G. Van Mier , Fracture Processes of Concrete, vol. 12, CRC press, 1996 .
[29] P. Wriggers , S. Moftah , Mesoscale models for concrete: homogenisation anddamage behaviour, Finite Elem. Anal. Des. 42 (7) (2006) 623–636 .
[30] K. Maekawa , T. Ishida , T. Kishi , Multi-scale modeling of concrete performance,J. Adv. Concr. Technol. 1 (2) (2003) 91–126 .
[31] I. Giorgio , D. Scerrato , Multi-scale concrete model with rate-dependent internalfriction, Eur. J. Environ. Civil Eng. 21 (7–8) (2017) 821–839 .
32] S.M. Razavi , M. Gonzalez , A.M. Cuitino , General and mechanistic optimal rela-
tionships for tensile strength of doubly convex tablets under diametrical com-pression, Int. J. Pharm. 484 (1) (2015) 29–37 .
[33] S.M. Razavi, M. Gonzalez, A.M. Cuitiño, Quantification of lubrication and parti-cle size distribution effects on tensile strength and stiffness of tablets, Powder
Technol. 336 (2018) 360–374, doi: 10.1016/j.powtec.2018.06.001 . [34] B. Yohannes , M. Gonzalez , A. Abebe , O. Sprockel , F. Nikfar , S. Kang , A. Cuitino ,
The role of fine particles on compaction and tensile strength of pharmaceutical
powders, Powder Technol. 274 (2015) 372–378 . [35] J. Park , J. Eslick , Q. Ye , A. Misra , P. Spencer , The influence of chemical structure
on the properties in methacrylate-based dentin adhesives, Dent. Mater. 27 (11)(2011) 1086–1093 .

P. Poorsolhjouy, M. Gonzalez / Mechanics Research Communications 92 (2018) 21–27 27
[
[
[
[
36] I. Giorgio , U. Andreaus , D. Scerrato , P. Braidotti , Modeling of a non-local stimu-lus for bone remodeling process under cyclic load: application to a dental im-
plant using a bioresorbable porous material, Math. Mech. Solids 22 (9) (2017)1790–1805 .
[37] J. Engelbrecht , A. Berezovski , Reflections on mathematical models of deforma-tion waves in elastic microstructured solids, Math. Mech. Complex Syst. 3 (1)
(2015) 43–82 . 38] C. Skidmore , D. Phillips , P. Howe , J. Mang , J. Romero , The evolution of mi-
crostructural changes in pressed HMX explosives, Technical Report, Los Alamos
National Lab., NM (United States), 1998 .
39] J. Jordan , J. Spowart , M. Kendall , B. Woodworth , C. Siviour , Mechanics of par-ticulate composites with glassy polymer binders in compression, Phil. Trans. R.
Soc. A 372 (2015) (2014) 20130215 . 40] Q. Su , Y. Bommireddy , M. Gonzalez , G.V. Reklaitis , Z.K. Nagy , Variation and risk
analysis in tablet press control for continuous manufacturing of solid dosagevia direct compaction, in: Proceedings of the 13th International Symposium on
Process Systems Engineering PSE 2018 (San Diego, CA), 2018 .