Embed Size (px)
Citation preview

Lecture 22: Graph-SLAM (2)
Dr. J.B. Hayet
CENTRO DE INVESTIGACION EN MATEMATICAS
Abril 2014
,J.B. Hayet Probabilistic robotics, Abril 2014 1 / 35

Outline
1 Data association in Graph-SLAM
2 Improvements and examples
,J.B. Hayet Probabilistic robotics, Abril 2014 2 / 35
Full SLAM
In that case the state vector is X0:t , that combines all positionsin the trajectory and the positions of the map elements,
X0:t =
R0
R1
. . .Rt
M
y Xt =
(Rt
M
).
The posterior we want to estimate is p(X0:t |Z1:t ,U1:t ,C1:t).
,J.B. Hayet Probabilistic robotics, Abril 2014 3 / 35

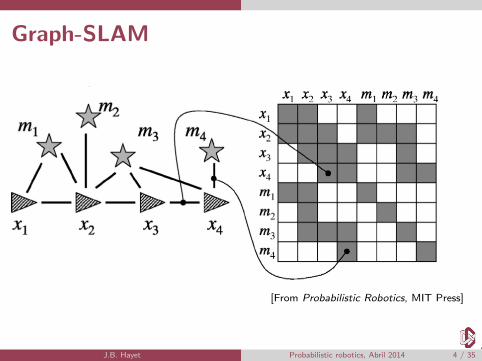
Graph-SLAM
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 4 / 35

Graph-SLAM
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 4 / 35
Graph-SLAM
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 4 / 35

Graph-SLAM: general algorithm
1 Inicializar µ.2 Repeat until convergence:
(ξ,Ω) ← Linearize()(ξ, Ω) ← Reduce()(µ,Σ0:t) ← Resolve()
3 Returns µ y ΣR0:tR0:t .
,J.B. Hayet Probabilistic robotics, Abril 2014 5 / 35

Data association in Graph-SLAM
Outline
1 Data association in Graph-SLAM
2 Improvements and examples
,J.B. Hayet Probabilistic robotics, Abril 2014 6 / 35
Data association in Graph-SLAM
Data association
In EKF-SLAM, for data association: check for all i(observations), which map element j among all of the mapbest corresponds (or if you need to create a new one);
In Graph-SLAM, the idea is to start with uniquecorrespondences (i.e. initially as many landmarks asobservations) and to merge the ones that correspond toidentical physical elements, two by two. Hence, at thecore of this strategy is to model the distribution of mj −mk , forany (j , k), to test the hypothesis that the 2 landmarks are thesame.
,J.B. Hayet Probabilistic robotics, Abril 2014 7 / 35
Data association in Graph-SLAM
Data association
It is a batch problem, hence one can take advantage of somespecificities:
one can consider the observations in any order, and even anysub-set of the observations at each step;
the computation of correspondences and the one of the map aremixed; to choose among two associations and merge them willlead to different maps, different posterior correspondences. . .
a priori associations could be un-done.
,J.B. Hayet Probabilistic robotics, Abril 2014 8 / 35

Data association in Graph-SLAM
Data association
For any pair of characteristics j and k in the map, we can estimatethe joint distribution of mj and mk :
p(mj ,mk |Z1:t ,U1:t ,C1:t) =∫Rt...∫R1p(mj ,mk |R1:t ,Z1:t ,U1:t ,C1:t)p(R1:t |Z1:t ,U1:t ,C1:t)dR1...dRt .
As we saw it, this distribution is Gaussian, as a marginal of the jointdistribution (ξ,Ω).
,J.B. Hayet Probabilistic robotics, Abril 2014 9 / 35

Data association in Graph-SLAM
Data association
Let τ(j) and τ(k) be the set of poses at which landmark j or k areseen
τ(j , k) = τ(j) ∪ τ(k),
Now let us remind that the output of the algorithm is the mean µover trajectories and map elements.
,J.B. Hayet Probabilistic robotics, Abril 2014 10 / 35

Data association in Graph-SLAM
Data association
With a Gaussian of joint state vector (x , y), represented in theform of information matrix/vector,
Ω =
(Ωxx Ωxy
Ωyx Ωyy
)y ξ =
(ξxξy
),
the marginal over x can be written through:
Ωxx = Ωxx − ΩxyΩ−1yy Ωyx ,
and
ξx = ξx − ΩxyΩ−1yy ξy .
,J.B. Hayet Probabilistic robotics, Abril 2014 11 / 35

Data association in Graph-SLAM
Data association
Let (ξmjmk, Ωmjmk
) be the parameters of the marginal over thelandmarks positions j and k , we can deduce from themarginalization formula:
Ωmjmk= Ωmjmk ,mjmk
− Ωmjmk ,Rτ (j ,k)ΣRτ (j ,k)Rτ (j ,k)ΩRτ (j ,k),mjmk,
where ΣRτ (j ,k)Rτ (j ,k) is the sub-matrix of the covariance matrix overtrajectories ΣR0:tR0:t (output of the algorithm).
,J.B. Hayet Probabilistic robotics, Abril 2014 12 / 35

Data association in Graph-SLAM
Data association
Rτ(j,k)τ(j,k)
ΩRτ(j,k)Rτ(j,k)
j
k
Ωmjmk
Ωmjmk,Rτ(j,k)
,J.B. Hayet Probabilistic robotics, Abril 2014 13 / 35

Data association in Graph-SLAM
Data association
Finally, the joint distribution over the positions of the landmarks jand k has the following parameters:
Ωmjmk= Ωmjmk ,mjmk
− Ωmjmk ,Rτ (j ,k)ΣRτ (j ,k)Rτ (j ,k)ΩRτ (j ,k),mjmk,
and
ξmjmk= Ωmjmk ,mjmk
µmjmk
= Ωmjmk ,mjmkΩ−1
mjmk ,mjmk(ξmjmk
+ ΩmjmkRτ(j,k)µτ(j ,k))
,J.B. Hayet Probabilistic robotics, Abril 2014 14 / 35

Data association in Graph-SLAM
Data association
We deduce the expression of the joint distribution :
p(mj ,mk |Z1:t ,U1:t ,C1:t) ∝ e− 1
2
mj
mk
T
Ωmjmk
mj
mk
+
mj
mk
T
ξmjmk
.
Now, we can examine the distribution of ∆j ,k = mj −mk , that wecan link easily to the joint one:(
mj −mk
mj + mk
)=
(1 −11 1
)(mj
mk
)= J
(mj
mk
).
,J.B. Hayet Probabilistic robotics, Abril 2014 15 / 35

Data association in Graph-SLAM
Data association
From the formula,
(mj −mk
mj + mk
)has also a Gaussian distribution,
mean:
(µmj− µmk
µmj+ µmk
)= J
(µmj
µmk
)covariance JΣmjmk
JT
In particular, the marginal of mj −mk has covariance:(1−1
)T
Σmjmk
(1−1
).
,J.B. Hayet Probabilistic robotics, Abril 2014 16 / 35

Data association in Graph-SLAM
Data association
Its inverse (check it!):
Ω∆jk=
1
4
(1−1
)T
Σ−1mjmk
(1−1
).
and in terms of what we have already computed:
Ω∆jk=
1
4
(1−1
)T
Ωmjmk
(1−1
).
,J.B. Hayet Probabilistic robotics, Abril 2014 17 / 35

Data association in Graph-SLAM
Data association
In the classic form of moments :
p(∆jk |Z1:t ,U1:t ,C1:t) =1√
det(2πΩ−1∆jk
)e−
12
(∆−µ∆)T Ω∆jk(∆−µ∆)
and the test to be done is:
p(∆jk = 0|Z1:t ,U1:t ,C1:t),
which can be written:
1√det(2πΩ−1
∆jk)e−
12µT∆Ω∆jk
µ∆ .
,J.B. Hayet Probabilistic robotics, Abril 2014 18 / 35

Data association in Graph-SLAM
Data association: modified algorithm
Correspondence test j , k , given Ω, ξ (joint distribution), µ,Σ0:t :
Ωmjmk= Ωmjmk ,mjmk
− Ωmjmk ,Rτ (j ,k)ΣRτ (j ,k)Rτ (j ,k)ΩRτ (j ,k),mjmk,
Ω∆jk= 1
4
(1−1
)T
Ωmjmk
(1−1
),
µ∆ = µj − µk ,
πjk = 1√det(2πΩ−1
∆jk)e−
12µT∆Ω∆jk
µ∆ ,
Si πjk > τ , returns true, otherwise returns false.
,J.B. Hayet Probabilistic robotics, Abril 2014 19 / 35
Data association in Graph-SLAM
Data association: modified algorithm
Initialize correspondences c1:t in a unique way1 Inicializar µ.
2 (ξ,Ω) ← Linearize()
3 (ξ, Ω) ← Reduce()
4 (µ,Σ0:t) ← Resolve()5 repeat until there is no more mergeable pairs j , k :
if TestCorrespondence(j , k , ξ,Ω, µ,Σ0:t), re-estimatetrajectories and map with the modified correspondences:∀i/c it = k , c it = j .
,J.B. Hayet Probabilistic robotics, Abril 2014 20 / 35
Data association in Graph-SLAM
Data association: modified algorithm
Once the correspondences vector is corrected, restart everythingwith the modified c1:t :
1 (ξ,Ω) ← Linearize()
2 (ξ, Ω) ← Reduce()
3 (µ,Σ0:t) ← Resolve()
,J.B. Hayet Probabilistic robotics, Abril 2014 21 / 35

Data association in Graph-SLAM
Data association: limits
Greedy algorithm, because again the problem is combinatorial(explore all possible associations)
By starting by unique correspondences, we then have to checkmerges two by two, this is not efficient.
It does not take into account the fact that at some t, onelandmark can only be seen through one observation,not two,
i 6= j ⇒ c it 6= c jt ,
with the algorithm above, we could have cases of associationsfor the same time t. But it is simple to handle this constraint.
,J.B. Hayet Probabilistic robotics, Abril 2014 22 / 35

Data association in Graph-SLAM
Data association: limits
In the exploration of data associations, the order counts: bystarting with one fusion, we may lose the track of the goodassociations set.
Negative information is not considered (absence of a landmarkthat should have been seen);
We do not use the possibility to remove a correspondence. . .
There are techniques dedicated to these problems.
,J.B. Hayet Probabilistic robotics, Abril 2014 23 / 35
Data association in Graph-SLAM
Data association: limits
This algorithm is essentially a theoretical base; many extensionscould be proposed:
merge features since the beginning, when it is very likely thatthey correspond to the same element;
use sub-maps built with other techniques locally efficient(EKF, occupancy grids. . . ) then use Graph-SLAM betweensub-maps.
,J.B. Hayet Probabilistic robotics, Abril 2014 24 / 35

Data association in Graph-SLAM
Graph-SLAM and other methods
Graph-SLAM has a lot in common with the technique ofEstrada et al. (cf. lecture 20) to stick sub-maps together,except that here, one handles information matrices,
In the same way, in the most advanced scan-matchingtechniques, use generally graph-based representations tomanage the loop closure problem. . .
,J.B. Hayet Probabilistic robotics, Abril 2014 25 / 35

Improvements and examples
Outline
1 Data association in Graph-SLAM
2 Improvements and examples
,J.B. Hayet Probabilistic robotics, Abril 2014 26 / 35

Improvements and examples
Example: mine exploration
Example from the book: mapping of abandoned mines. . .
Network of corridors, hundreds of meters long. . .
Algorithm:1 construction of an occupancy grid with scan matching (see
previous lecture),2 division of the map in sub-maps of ≈ 5m,3 construction of a graph, where each node corresponds to a
sub-map (pose node in Graph-SLAM),4 association test for identical data (map correlation) and
re-estimation of the map.
,J.B. Hayet Probabilistic robotics, Abril 2014 27 / 35

Improvements and examples
Example: mine exploration
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 28 / 35

Improvements and examples
Example: mine exploration
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 29 / 35

Improvements and examples
Example: mine exploration
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 30 / 35

Improvements and examples
Example: mine exploration
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 30 / 35

Improvements and examples
Example: mine exploration
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 30 / 35

Improvements and examples
Example: mine exploration
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 31 / 35

Improvements and examples
Optimization-based variants
An improvement point resides in the optimization; what we couldfind is the map/trajectory maximizing the posterior, i.e.minimizing:
l0:t = cste. + RT0 Ω0R0+
12
t∑τ=1
(Rτ − g(Rτ−1|Uτ ))TΣ−1R (Rτ − g(Rτ−1|Uτ ))+
12
t∑τ=1
oτ∑i=1
(Z iτ − h(Xτ ,C
iτ ))TΣ−1
M (Z iτ − h(Xτ ,C
iτ ))
.
The basic algorithm linearizes g and h. . . but it has the advantage ofestimating the covariance on trajectories.
,J.B. Hayet Probabilistic robotics, Abril 2014 32 / 35

Improvements and examples
Optimization-based variants
Instead of sequences linearizations/reductions/optimizations, thisproblem can be handled by classical optimization methods todetermine the MAP (maximum a posteriori) :
gradient descent;
Levenberg-Marquardt;
conjugated gradient. . .
Most of the literature is based on this type of approach.
,J.B. Hayet Probabilistic robotics, Abril 2014 33 / 35

Improvements and examples
Optimization-based variants
They allow to handle much larger dimensions (examples upto 108 features. . . );
They are faster in general than the original algorithm;
They are sensible to local minima. . .
They just output the mode (MAP).
,J.B. Hayet Probabilistic robotics, Abril 2014 34 / 35

Improvements and examples
Optimization-based variants
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 35 / 35

Improvements and examples
Optimization-based variants
[From Probabilistic Robotics, MIT Press]
,J.B. Hayet Probabilistic robotics, Abril 2014 35 / 35





























