Embed Size (px)
Citation preview

Lab 04: AEV External SensorsAdvanced Energy Vehicle (AEV)

AEV Project Objective(Problem Definition)
INITIAL CONCEPTS(Brainstorming)
EXPERIMENTAL RESEARCH
ANALYZE
DESIGN DECISION
RESEARCH
COMPARE
FINAL DESIGN
Present AEV Design
PT 1PT 2PT 3PT 4
(System Analysis)(Programming)

Learning Objectives Become familiar with the external sensor
hardware components• Become familiar with troubleshooting
techniques
Program the function calls in controlling the AEV using the external sensors

External Sensors The importance of external sensors on
the AEV is to provide real-time information being provided to the Arduino for autonomous vehicle operation• This is known as a feedback control
The sensor that will be focus of today’s lab is the Reflective Sensor
Image: from Arduino Website

Reflective Sensors The sensor will produce a low voltage due to the
reflectance of the aluminum tape and produce a high voltage due to the dark color of the wheel
1 Mark
1 Mark
1 Mark
1 Mark
This voltage change is called a “mark.” For one full wheel revolution, a sensor will have 4 voltage changes or 4 marks. Since we have two sensors, one full wheel revolution will have how many marks??
EIGHT Marks!!

Mounting the Sensor The closer the sensor is to the wheel, the
better voltage reading the sensor will usually have
OptimumToo Far Away

Troubleshooting the Sensors To make sure the sensors
are on correctly
Run the “reflectanceSensorTest();”
Make sure to set to set the serial monitor to 115200 Baud
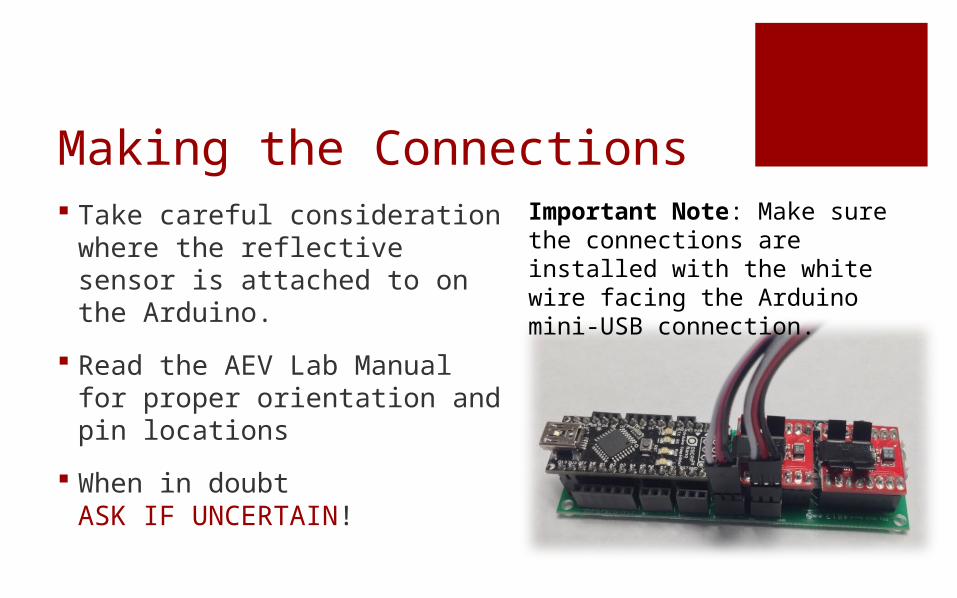
Making the Connections Take careful consideration
where the reflective sensor is attached to on the Arduino.
Read the AEV Lab Manual for proper orientation and pin locations
When in doubt ASK IF UNCERTAIN!
Important Note: Make sure the connections are installed with the white wire facing the Arduino mini-USB connection.

Arduino Programming Sensor Function Calls goToRelativePosition(M);• One Argument; works specifically with the reflectance
sensor M: wheel marks
• Example: motorSpeed(4,27);goToRelativePosition(44);
Each wheel has 8 marks and the wheel has a circumference of 3.902 inches
Therefore: (44 marks)*(3.902/8) inches = 21.46 inches traveled
Sets all motors to 27% full powerContinues the last command for 44 wheel marks.

Arduino Programming Sensor Function Calls goToAbsolutePosition(M);• One Argument; works specifically with the reflectance
sensor M: wheel marks
• Example: motorSpeed(2,30);goToAbsolutePosition(500);
Each wheel has 8 marks and the wheel has a circumference of 3.902 inches
Therefore: (500marks)/(3.902/8) inches = 243.76 inches traveled
Sets motor 2 to 30% full powerContinues the last command for until the AEV accumulates 500 total wheel marks.

We want to go ANOTHER 40 inches (aka 82 marks) what code do we want?
motorSpeed(4,20);goToAbsolutePosition(164); OR goToRelative(82);
Difference Between goToAbsolutePosition and goToRelativePosition
40 Inches
80 Inches
We want to go 40 inches (aka 82 marks) what code do we want?
motorSpeed(4,20);goToAbsolutePosition(82); OR
goToRelativePosition(82);
0 Inches
Note: This is assuming the AEV stops at exactly said distance and does not coast!
Questions?





























