Embed Size (px)
Citation preview

IV. INTEGRASI SIMULASI SUPERVISORI KENDALI SUHU,
KELEMBABAN, DAN AMONIA PADA
BROILER CLOSED HOUSE
Abstract
Development of the poultry industry in Indonesia was now looking forward so rapidly, but
always faced with various constraints also growing and increasingly complex. Broiler
livestock enterprises, to achieve success not only required large capital and specialized
skills are adequate, but also the management and reliable technology. Environmental
conditions with high temperatures and high humidity can cause heat stress in broilers. In
case of heat stress of broiler chickens will make an important (gasping). Each year, the
broiler industry suffered direct mortality and ammonia loss due to the extreme heat of an
unpredictable nature. This situation will get worse as to approach the end of the production
cycle, when approaching the weight of livestock for sale. The purpose of this study was to
simulate the integration supervisori control in control mode, and the optimal control
parameters and control of ON-OFF, PID, Fuzzy and ANFIS according poultry knowledge,
knowledge of climate and environment, knowledge of control, according to the broiler
house environment. One solution of heat treatment on broilers srtess was the use of broiler
closed house. Stages of research testing the functional modules system supervisori control
(SSC) that have been developed by computer simulations performed with the test data (the
control variable and the control mode) was prepared, so that each response and the output
produced by the SSC are integrated component modules with four , three, two-mode ON-
OFF control, PID, Fuzzy Logic and ANFIS can check the truth. In implementation, the
system was used to control the environment by environment basis. However supervisori
fixed input control based broiler closed house basis are carried out directly, through the use
of models broiler closed house. It was an integrated environmental control, and integrated
broiler closed house-oriented basis. Basis of this system bridges the control environment
by looping on the farm base control system. Discusses the integration of control systems
supervisori control mode consists of several control modes: two modes of control (PID
Fuzzy Logic) (PID ANFIS), three modes of control (ON-OFF, PID, Fuzzy Logic), (PID,
Fuzzy Logic and ANFIS), four modes of control (ON-OFF, PID, Fuzzy Logic and ANFIS)
with the parameters of temperature, humidity and ammonia, which produces better control
response. In the control integration was discussed on supervisori control in an integrated
broiler house closed, the choice of control modes, control parameters, the optimal control
criteria, based on knowledge of broiler knowledge, climate and environmental knowledge,
control knowledge that have been stored in a data base of supervisory control engine
(SCE) which was integrated so that under certain conditions can be used as needed with a
combination of gain scheduling control adaptation (PGA) and the model reference adaptive
control (AMA). Transient response of control according to the response table ON-OFF
control, PID, Fuzzy Logic and ANFIS integrated broiler house closed two, three and four
modes of control.
Keyword : Integration Supervisori environmental control on broiler houses closed

126
Abstrak
Perkembangan industri perunggasan di Indonesia kini tampak sudah maju demikian pesat, namun
senantiasa dihadapkan pada berbagai kendala yang juga ikut berkembang dan semakin kompleks.
Usaha ternak ayam pedaging, untuk mencapai sukses tidak saja diperlukan modal besar dan
keterampilan khusus yang memadai, tetapi juga pengelolaan maupun teknologi yang handal.
Kondisi lingkungan dengan temperatur tinggi dan kelembaban tinggi dapat menyebabkan
heat stress pada broiler. Dalam keadaan heat stress ayam broiler akan melakukan penting
(terengah-engah). Setiap tahun, industri broiler mengalami mortalitas dan amonai
kehilangan langsung akibat panas yang ekstrim dari alam yang tidak dapat diprediksi.
Situasi ini akan semakin parah saat mendekati akhir siklus produksi, saat ternak mendekati
bobot untuk dijual. Tujuan penelitian ini adalah untuk mensimulasikan integrasi
supervisori kendali dalam modus kendali, parameter kendali dan optimal kendali dan ON-
OFF, PID, Fuzzy dan ANFIS sesuai pengetahuan peternakan ayam, pengetahuan iklim dan
lingkungan, pengetahuan kendali, sesuai lingkungan pada broiler house. Salah satu solusi
dari penanganan heat srtess pada ayam broiler adalah penggunaan broiler house (kandang
tertutup). Tahapan penelitian Pengujian fungsional modul-modul sistem supervisori
kendali (SSK) yang sudah dikembangkan dilakukan dengan simulasi komputer dengan
data-data uji (variabel kendali dan modus kendali) yang disiapkan, sehingga setiap respon
dan keluaran yang dihasilkan oleh modul komponen SSK yang terintegrasikan dengan
empat, tiga, dua modus kendali ON-OFF, PID, FUZZY LOGIC dan ANFIS dapat di cek
kebenarannya. Dalam implementasinya, sistem ini digunakan untuk pengontrolan
lingkungan dengan basis lingkungan. Namun demikian supervisori kontrol input tetap
didasarkan basis peternakan broiler yang dilakukan secara lansung, yaitu melalui
penggunaan model broiler closed house. Jadi disini pengontrolan lingkungan terpadu,
terintegrasi dan berorientasi basis peternakan. Sistem ini menjembatani kontrol basis
lingkungan dengan looping pada sistem kontrol basis peternakan. Sistem supervisori
kendali membahas integrasi modus kendali terdiri dari beberapa modus kendali yaitu dua
modus kendali (PID fuzzy Logic), (PID ANFIS), tiga modus kendali (ON-OFF, PID,Fuzzy
Logic), (PID, Fuzzy Logic dan ANFIS), empat modus kendali (ON-OFF, PID, Fuzzy
Logic dan ANFIS) dengan parameter suhu, kelembaban dan amonia yang menghasilkan
respon kendali yang lebih baik. Pada integrasi kendali inilah di bahas tentang supervisori
kendali pada broiler closed house yang terintegrasi, adanya pilhan modus kendali,
parameter kendali, dengan kriteria optimal kendali, yang didasari pengetahuan peternakan
ayam broiler (broiler knowledge), pengetahuan iklim dan lingkungan luar (climate and
environmental knowledge), pengetahuan kendali (control knowledge) yang sudah
tersimpan dalam data base supervisory control engine (SCE) yang secara terpadu sehingga
dalam kondisi tertentu bisa digunakan sesuai kebutuhan dengan perpaduan kendali
penjadwalan gain adaptasi (PGA) dan kendali adaptif model acuan (AMA). Respon
transien kendali sesuai tabel respon kendali ON-OFF, PID, Fuzzy Logic dan ANFIS
broiler closed house yang terintegrasi dua, tiga dan empat modus kendali.
Keyword: Integrasi Sistem Supervisori kendali lingkungan pada broiler closed house

127
Pendahuluan
Perkembangan industri perunggasan di Indonesia kini tampak sudah maju
demikian pesat, namun senantiasa dihadapkan pada berbagai kendala yang juga
ikut berkembang dan semakin kompleks. Usaha ternak ayam pedaging, untuk
mencapai sukses tidak saja diperlukan modal besar dan keterampilan khusus yang
memadai, tetapi juga pengelolaan maupun teknologi yang handal (Murtidjo 2006)
Kondisi lingkungan dengan temperatur tinggi dan kelembapan tinggi dapat
menyebabkan heat stress pada broiler. Dalam keadaan heat stress ayam broiler
akan melakukan penting (terengah-engah). Setiap tahun, industri broiler mengalami
mortalitas dan kehilangan langsung akibat panas yang ekstrim dari alam yang tidak
dapat diprediksi. Situasi ini akan semakin parah saat mendekati akhir siklus
produksi, saat ternak mendekati bobot untuk dijual
Salah satu solusi dari penanganan heat srtess pada ayam broiler adalah
penggunaan broiler house (kandang tertutup). Broiler house adalah kandang ayam
dengan suhu dan kelembapan yang dapat diatur secara otomatis sehingga ayam
tidak akan mengalami heat stress. Menurut (PCPI 2005) terdapat beberapa
keuntungan dari penggunaan broiler house yaitu dapat meningkatkan produktivitas
dan pertumbuhan serta temperatur di dalam kandang lebih dingin dan ayam tidak
terpengaruh cuaca dari luar kandang.
Pada ayam broiler yang berumur di atas 3 minggu, keadaan suhu
lingkungan optimum untuk pertumbuhan berkisar antara 20-25oC dengan
kelembaban berkisar antara 50-70% (Borges et al. 2004). Ayam Broiler akan
mengalami cekaman panas serius bila suhu lingkungan lebih tinggi dari 32oC
(Cooper dan Washburn 1998). Indonesia yang merupakan daerah tropis dengan
suhu harian dapat melebih 35oC atau yang secara umum suhu lingkungan bisa
berfluktuasi antara 29oC hingga 36
oC dan kelembabannya 70-80 % (Hery 2009)
berpotensi untuk mengalami cekaman panas pada pengembangan ayam broiler.
Pada suhu lingkungan 28 oC selera makan akan menurun 12% dan apabila
kelembabannya tinggi maka selera makan akan menurun 50%. Suhu 28oC adalah
suhu kritis atas yang jika suhu lingkungan melebihi batas ini, angka sakit dan
kematian meningkat, sedangkan pertumbuhan menurun. Pada suhu mencapai 39oC
kematiannya tinggi sekali (Amrullah 2004).

128
Sistem kendali pada awalnya adalah konvensional dimana informasi
numerik yang merupakan pasangan data masukan dan keluaran plant diperoleh dari
sensor. Sedang informasi linguistik biasanya diperoleh dari operator yang paham
dengan pengendalian plant dimaksud (Ogata 1970). Dalam perkembangannya,
sistem kendali mengarah kepada sistem kendali berbasis komputer digital karena
lebih luwes (mudah dimodifikasi), pemrosesan data yang sederhana, dan ekonomis
(Paraskevopoulos 1996).
Berkembangnya sistem kendali digital membuat banyak peneliti yang
memfokuskan penelitiannya pada metode atau algoritma yang digunakan sebagai
pengendali. Diawali dari pengendalian dengan metode PID, yaitu dengan cara
menyetel beberapa parameter sehingga dihasilkan hasil pengendalian yang optimal.
Ketidakmampuannya untuk beradaptasi pada beberapa perubahan seperti
performansi komponen dengan pertambahan waktu atau perubahan parameter dan
kondisi sekelilingnya maka dibutuhkan sistem kendali yang bisa beradaptasi pada
perubahan-perubahan tersebut.
Pengembangan sistem kontrol berbasis komputer untuk broiler house telah
kembangkan selama ini tapi masih sistem kontrol memberikan batasan terhadap
pilihan metode kontrol dan parameter yang dikendalikan. Untuk beberapa alasan,
pengguna hanya mengontrol suhu ruangan dan kelembaban dengan metode kontrol
PID (Proporsional Integral Derivative) tetapi dalam situasi lain mungkin pengguna
hanya perlu mengontrol suhu ruangan dan intensitas cahaya dengan metode kontrol
fuzzy atau metode lainnya (Cunha 2003; Salgado 1998).
Pemilihan skenario kontrol untuk broiler house cukup bervariasi yang tergantung
pada beberapa faktor : (1) kondisi manajemen (lingkungan) peternakan ayam
broiler, (2) kontinyunitas produksi ayam broiler, (3) keterbatasan sumber daya, dan
(4) jenis kendali digunakan. Oleh karena itu, pengguna harus diberi cara memilih
skenario pengendalian yang paling cocok dengan kebutuhannya.
Metode yang mendapat perhatian luas dalam dasawarsa terakhir adalah
metode berbasis kecerdasan buatan (artificial intelligence) yaitu neuro fuzzy. Neuro
fuzzy merupakan perpaduan jaringan neural artificial dan sistem logika fuzzy
(Kosko 1992), (Kartalopoulos 1996). Pada sistem kendali berbasis neuro fuzzy,
informasi numerik dimanfaatkan oleh jaringan neural artifisial guna mendapatkan
kinerja sistem kendali yang bersifat adaptif (Brown dan Harris, 1994). Jaringan ini

129
meniru kerja jaringan neural biologis manusia. Jaringan neural dikarakteristikkan
oleh arsitektur, algoritma pembelajaran, dan fungsi aktivasinya. Sedang informasi
linguistik diolah menggunakan sistem logika fuzzy (Visioli dan Finzi 1998).
Pada sistem logika fuzzy, informasi linguistik diimplementasikan dalam
suatu himpunan basis aturan jika-maka. Basis aturan ini mengakomodasi semua
informasi yang tidak presisi tentang hubungan masukan dan keluaran plant. Sistem
neuro fuzzy terus mengalami perkembangan dan penyempurnaan algoritma. Salah
satu perkembangannya adalah dengan diperkenalkannya metode ANFIS (Adaptive
Neuro Fuzzy Inference System) oleh (Jang 1993). ANFIS) adalah sistem inferensi
logika fuzzy yang diimplementasikan pada suatu jaringan adaptif. Sistem ini
memiliki kemampuan untuk memperbaiki parameter-parameter basis aturan logika
fuzzynya yaitu parameter premis (antécédent) dan parameter konsekuensi
(consequent). Metode ANFIS (Adaptive Neuro Fuzzy Inference System) selanjutnya
mengalami berbagai penyempurnaan diantaranya oleh Wang dan Lee (2002)
dengan penerapan pada sistem pemrosesan sinyal untuk keperluan medis.
Penerapan metode ANFIS (Adaptive Neuro Fuzzy Inference System) untuk
sistem kendali agar bersifat cerdas, yaitu mampu beradaptasi sesuai dengan
perubahan target pengendalian dan juga kondisi plant. Salah satu cara penyelesaian
permasalahan tersebut di atas dengan menggunakan simulasi kendali PID Fuzzy,
PID ANFIS, ON OFF, PID, Fuzzy, ANFIS. Supervisori kendali diharapakn dapat
membantu mengurangi kesalahan terutama human error sehingga sistem dapat
berjalan sehingga didapat hasil optimal. Kendali PID pada dasarnya merupakan
suatu proses dari suatu program yang dijalankan/diexecute dengan menggunakan
komputer, dimana kita memasukkan nilai Setting Point (SP) dan Present Value
(PV), yang kemudian data yang didapatkan diproses sehingga error yang
didapatkan sama dengan 0, atau nilai Setting Point = Present Value (J. Van de
Vegte 1994).
Kendali PID Fuzzy Logic bekerja dengan menerima sinyal output dari
panas heater. Sinyal tersebut kemudian dibandingkan dengan setpoint sehingga
dihasilkan error baru. Metode yang digunakan adopsi dari (Zhao 1993), (Joelianto
dan Sitanggang 2009) yaitu kendali dengan fuzzy gain.

130
Gambar 4. 1 Hybrid Kendali PID- Logika Fuzzy. Sumber (Zhao 1993)
Metode yang digunakan adalah harga Kp, Ki, dan Kd dapat menyesuaikan
sendiri apabila terjadi perubahan panas pada heater dan kipas angin. Parameter
kendali PID yaitu Kp, Ki, Kd Ti Td diatur fuzzy logic untuk memperoleh harga yang
sesuai. Dalam mengambil kepuasan pada parameter Kp, Ki, Kd dinormalisasi antara
0 dan 1.
Gambar 4. 2 Member Function input dan output. Sumber (Zhao1993)
Gambar 4. 3 Respon hybrid kendali PID-Logika Fuzzy. Sumber (Zhao1993)

131
Sistem utama adalah kendali PID, sedangkan logika fuzzy disini berfungsi
untuk memperbaiki respon dan recovery time terhadap disturbance seperti terlihat
pada Gambar 4.3. Output dari fuzzy kontrol unit yang dihasilkan mempunyai beban
lebih kecil dari kendali PID, artinya range dari output membership function telah
ditetapkan yaitu +U max dan –U max, dimana harga U max lebih kecil dari harga
kendali PID, pada paper ini dicoba untuk memberikan beban sebesar 50% dari
kendali PID. Sehingga apabila range dari PID adalah 0-255, maka beban output
pada logika fuzzy yaitu 0-128. Untuk lebih jelasnya dapat kita lihat pada Gambar 3.
Untuk mendapatkan hasil yang optimal, maka kita dapat men-tuning parameter
fuzzy control tersebut dengan cara try and error yaitu mengatur (adjust)
membership function (range e-max dan de-max) serta rules-rules yang ada seperti
terlihat pada Gambar 4.3.
Kelebihan ANFIS adalah kemampuan belajaran, seperti yang dimiliki oleh
jaringan saraf tiruan. Pengendali ANFIS dapat belajar dari pengendali PID
konvensional, kemudian ANFIS digunakan untuk mengendalikan plant. Sebagai
tiruan PID, ANFIS belajar menirukan PID selama pelatihan. ANFIS yang
dihasilkan kemudian digunakan untuk membangkitkan isyarat kendali yang
selanjutnya dilolohkan ke plant. Konfigurasi ANFIS sebagai tiruan PID saat
pelatihan terlihat di Gambar 4.4.
Gambar 4. 4 Pelatihan ANFIS dan PID. Sumber (Zhao 1993)
Dari hasil tuning PID didapatkan nilai K=1, Ti = 2, dan Td = 0,2. Data
pelatihan ANFIS berjumlah 250 pasang data dengan setiap pasang data terdiri atas
[e(k) de(k) u(k)]. Data pengecekan berjumlah sama dengan data pelatihan. Jumlah
parameter yang diperbaharui pada saat pelatihan adalah 30 parameter taklinier dan

132
75 parameter linier untuk fungsi keanggotaan Bell dan 20 parameter taklinier serta
75 parameter linier untuk fungsi keanggotaan segitiga.
Kinerja pelatihan ANFIS dinyatakan dengan akar rerata kuadrat galat
(RMSE) antara target pelatihan dan keluaran ANFIS. Setelah ANFIS dilatih
menirukan PID, pengendali PID dilepas dan digunakan untuk mengendalikan plant.
Gambar 4.5 menunjukkan konfigurasi ANFIS pada saat pengendalian.
Gambar 4. 5 Kendali hybrid ANFIS dan PID Sumber (Zhao1993)
Setelah dilatih ANFIS digunakan untuk mengendalikan sistem tinggi
permukaan air. Hasil pengendalian dengan ANFIS kemudian dibandingkan dengan
hasil pengendalian fuzi konvensional dan PID sebagai supervisorinya.
Kemampuan adaptif ANFIS pada kontrol adaptif dan kontrol belajar.
Struktur ANFIS mempresentasikan pengetahuna dan nonlinear yang memiliki
keunggulan dibandingkan pendekatan linier klasik seperti dalam sistem kontrol
linier. Dalam tulisan ini, maka akan dipertimbangkan penerapan ANFIS dalam
referensi hibrid mengendalikan kerangka untuk meningkatkan kinerja respon
sistem loop tertutup dikontrol oleh pengontrol PID dengan cara menentukan set-
point. Struktur ini kemudian disebut ANFIS PID merupakan bagian dari sistem
supervisori kendali Gambar 4.5 menunjukkan diagram blok dari ANFIS PID.
(Joelianto dan Sitanggang 2009). Garis putus-putus dan garis padat mewakili sinyal
digital dan analog sinyal masing-masing.

133
Gambar 4. 6 Blok diagram kendali hybrid ANFIS dan PID
Sumber (Joelianto dan Sitanggang 2009)
Dalam Gambar 4.6, d sinyal (t) adalah output dari ANFIS yang sementara
perubahan default set-titik r(t) selama transien respon. Tindakan ANFIS
didefinisikan oleh kt acara enable yang terdeteksi oleh pengamatan kinerja embed
dalam ANFIS. Model ini didefinisikan dengan persamaan berikut
|E (t)| |y (t) - r (t)| δ………………………………………………...(4.1)
Sistem menginformasikan pengamatan kinerja yang deviasi dari output
sistem loop tertutup (y(t)) dengan sinyal referensi (r(t)) adalah lebih besar dari
toleransi yang ditentukan. Selanjutnya, ANFIS yang menghitung sinyal referensi
yang sesuai (d(t)) dan mengirimkan ke pers penjumlahan secara terus menerus
dengan interval waktu yang telah ditetapkan ( ) sampai pengamatan kinerja
deteksi tidak aktifkan. Dalam kondisi tidak aktif terjadi kesalahan ketika sistem
loop tertutup memasuki dengan batas toleransi yang ditetapkan seperti :
|E(t) | |y(t) - r(t) ……………………..………………………………(4.2)
Ketika sistem terdeteksi menonaktifkan, ANFIS kemudian berhenti
mengirimkan sinyal referensi (d(t)). Ini mengembalikan referensi sinyal dengan
sinyal referensi (r(t)) dengan mengirimkan sinyal d(t) 0. (Joelianto dan
Sitanggang 2009, Joelianto, dan Williamson 2009).
Disamping integrasi kendali atau kendali hybrid dikembangkan kendali
adaftif pada dasarnya kendali adaptif adalah kendali tak linier, sehingga banyak
digunakan untuk mengendalikan sistem-sistem tak linier (Tai dan Tsao. 2000),
(Zhao dan Kanellakopoulos 1997), (Astrom dan Wittenmark 1995), (Isermann,
Lachman, Matko1992), (Guo et al. 2001), (Hong et al. 2001). Dalam aplikasi
industri ada tiga buah model struktur kendali adaptif yang paling banyak
134
digunakan, yaitu: (1) kendali Penjadwalan Gain Adaptasi (Adaptif Gain Scheduling
Control). (2) kendali Adaptif Model Acuan (Model Reference Adaptif Control). (3)
kendali Adaptif Swa-Tala (Self-Tuning Adaptif Control).
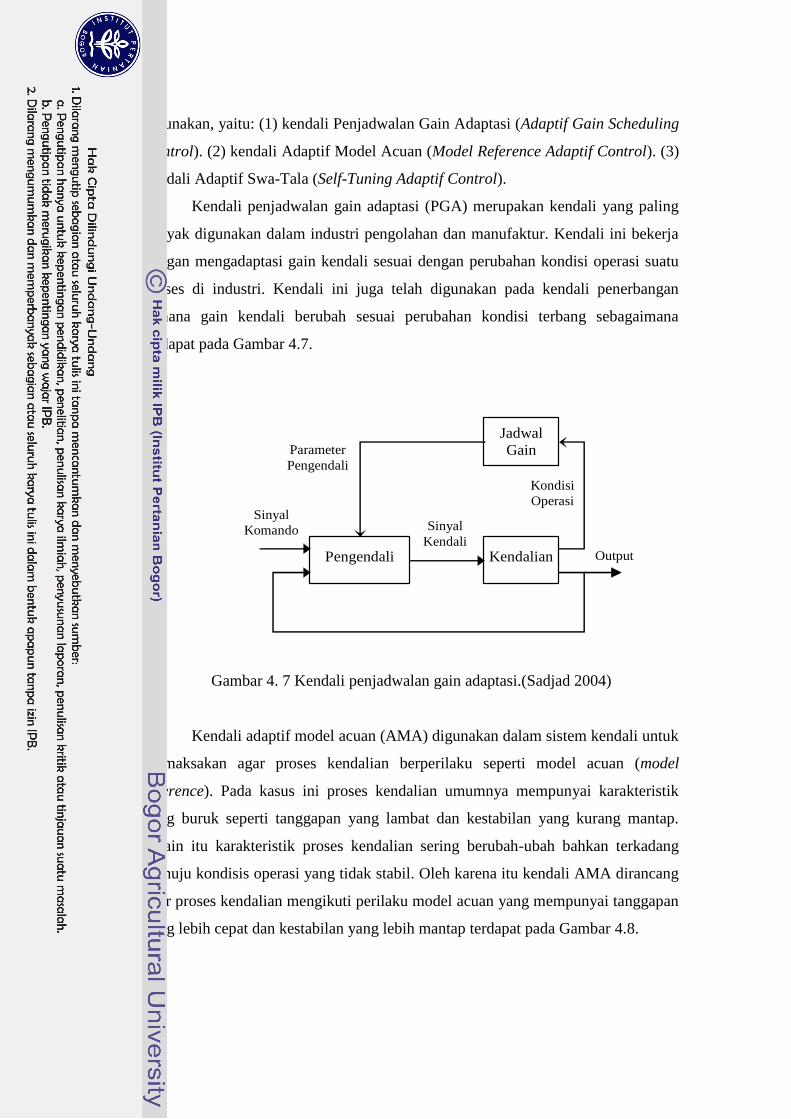
Kendali penjadwalan gain adaptasi (PGA) merupakan kendali yang paling
banyak digunakan dalam industri pengolahan dan manufaktur. Kendali ini bekerja
dengan mengadaptasi gain kendali sesuai dengan perubahan kondisi operasi suatu
proses di industri. Kendali ini juga telah digunakan pada kendali penerbangan
dimana gain kendali berubah sesuai perubahan kondisi terbang sebagaimana
terdapat pada Gambar 4.7.
Gambar 4. 7 Kendali penjadwalan gain adaptasi.(Sadjad 2004)
Kendali adaptif model acuan (AMA) digunakan dalam sistem kendali untuk
memaksakan agar proses kendalian berperilaku seperti model acuan (model
reference). Pada kasus ini proses kendalian umumnya mempunyai karakteristik
yang buruk seperti tanggapan yang lambat dan kestabilan yang kurang mantap.
Selain itu karakteristik proses kendalian sering berubah-ubah bahkan terkadang
menuju kondisis operasi yang tidak stabil. Oleh karena itu kendali AMA dirancang
agar proses kendalian mengikuti perilaku model acuan yang mempunyai tanggapan
yang lebih cepat dan kestabilan yang lebih mantap terdapat pada Gambar 4.8.
Parameter
Pengendali
Sinyal
Kendali
Jadwal
Gain
Kendalian Pengendali
Kondisi
Operasi
Output
Sinyal
Komando

135
Gambar 4. 8 Kendali adaptif model acuan. .(Sadjad 2004)
Pada Pengembangan dengan kendali adaptif yang terdiri dari 3 atau 4
modus kendali dikembangkan yaitu supervisoi kendali.
Tujuan penelitian ini adalah untuk mensimulasikan integrasi supervisori
kendali dalam modus kendali, parameter kendali dan optimal kendali dan ON-OFF,
PID, Fuzzy dan ANFIS sesuai pengetahuan peternakan ayam, pengetahuan iklim
dan lingkungan, pengetahuan kendali, sesuai lingkungan pada broiler house.
Penelitian terdahulu yang terkait dengan interaksi dua modus kendali
lingkungan suhu dan kelembaban di kandang tertutup diantaranya: Daskalov PI. et
al. (2005) membahas kendali adaptif suhu kelembaban non-liner pada kandang
ternak babi yang terdiri dari dua musim dingin dan musim panas, pada musim
dingin suhu 220C, kelembaban 70 %, kecepatan angin 1 m/s dan musim panas suhu
260C, kelembaban 70%, kecepatan angin 3,7 m/s. (Paul 2000) membahas hirarki
supervisori kendali dapat dilakukan secara sentralistik, desentralistik terhadap
sistem produk multi-agen, hal ini menunjukkan bahwa perilaku produk multi agen
dapat dikendalikan secara terpisah dan bersamaan terhadap setiap agen. Seminar
K.B et al. (2006) membahas sistem supervisori kendali rumah tanaman (green
hause) telah dikembangkan dan diuji dengan tanaman mentimun. Hasil
pengembangan dan pengujian adalah fungsi kerja yang memenuhi kriteria kendali
dan obyektif berdasarkan pada preferensi pengguna. Hal ini memberikan
fleksibilitas lebih besar kepada pengguna untuk mengatasi kendala varietas atau
kondisi lingkungan, jenis tanaman harus dikendalikan dalam rumah tanaman,
perangkat keras, dan jenis modus kendali.
y
ym
Parameter
Pengendali
u
uc Sinyal
Kendali
Mekanisme
Pengaturan
Kendalian Pengendali
Model
Acuan

136
Bahan dan Metode
Bahan Yang Digunakan
Lokasi penelitian ini dilaksanakan antara lain di laboratorium Teknik
Bioproses Universitas Tsukuba, Jepang, Laboratorium Kontrol dan Instrumentasi
FATETA IPB dan University of Farm Broiler House Cikabayan IPB mulai bulan
Januari 2009 sampai April 2011. Bahan yang digunakan terdiri dari ayam broiler
sebanyak 20.000 ekor, kandang ayam dengan sistem broiler house yang ada di
lahan penelitian Cikabayan IPB dengan ukuran panjang x lebar x tinggi adalah 120
m x lebar 12 m x tinggi 2.5 m., pakan ayam, air minum, menggunakan software
matlab versi 7 untuk simulasi kendali suhu, kelembaban dan amonia.Peralatan yang
digunakan meliputi : sensor suhu sensor kelembaban SHT75 dan sensor amonia
TGS 444. Satu set komputer dan peripheral, weather station, Satu set kandang
ayam dengan sistem isolasinya, Exhaust fan (Kipas angin) sebanyak 8 buah,
Cooling Pad (unit pendingin) sebanyak 2 buah, Heater (unit pemanas) sebanyak 2
buah,Temtron sebanyak 2 buah, Tempat air minum, Tempat pakan ayam.
Gambar 4. 9 Sistem supervisori kendali lingkungan pada Broiler Closed House
Tahapan penelitian Pengujian fungsional modul-modul sistem supervisori
kendali (SSK) yang sudah dikembangkan dilakukan dengan simulasi komputer
dengan data-data uji (variabel kendali dan modus kendali) yang disiapkan,

137
sehingga setiap respon dan keluaran yang dihasilkan oleh modul komponen SSK
yang terintegrasikan dengan empat, tiga, dua modus kendali ON-OFF, PID,
FUZZY LOGIC dan ANFIS dapat di cek kebenarannya.
Metode yang Digunakan
Perancangan Supervisori Kendali pada Broiler house
Sistem supervisori kontrol merupakan model pengembangan kontrol adaftif
yang melakukan kontrol secara bersamaan, bekerjasama, mengawasi proses kontrol
yang sedang berjalan. Pengontrolan lingkungan dengan basis lingkungan adalah
kontrol input yang didasarkan pada pengukuran output berupa lingkungan.
Sedangkan pengontrolan lingkungan basis peternakan adalah input yang didasarkan
pengukuran output yang lansung dari peternakan.
Implementasi sistem supervisori kontrol lingkungan peternakan dapat
dilihat pada Gambar 4.9. Dalam implementasinya, sistem ini digunakan untuk
pengontrolan lingkungan dengan basis lingkungan. Namun demikian supervisori
kontrol input tetap didasarkan basis peternakan yang dilakukan secara lansung,
yaitu melalui penggunaan model peternakan. Jadi disini pengontrolan lingkungan
terpadu, terintegrasi dan berorientasi basis broiler house. Sistem ini menjembatani
kontrol basis lingkungan dengan looping pada sistem kontrol basis peternakan
(Gambar 4.9). Disamping itu, sistem juga dilengkapi dengan menggunakan
identifikasi dan pengontrolan yang lain, yaitu ON-OFF, PID, Fuzzy Logic dan
ANFIS.
Pada aplikasi sistem di lapangan, akan dicobakan pengontrolan parameter
lingkungan suhu, variabel terukur kelembaban dan amonia pada budidaya
peternakan ayam broiler.
Pada sistem yang dibangun terdiri dari perangkat keras yang tersusun dalam
rangkaian struktural dan mekanik; elektronik dan komputer dan peripheral dan
perangkat lunak (software). Besaran fisik (suhu, kelembaban dan amonia)
dideteksi oleh sensor yang bentuk outputnya digital, kemudian diteruskan ke sistem
komputer. Komputer akan menterjemahkan dan memproses pesan-pesan dalam
program.
Masukan sensor yang diolah oleh komputer terdiri dari beberapa terminal
(channel). Sistem buffer akan memberikan sinyal instruksi (kode) biner kepada

138
komputer untuk memproses data yang diprioritaskan. Pengolahan informasi yang
dilakukan komputer meliputi inisialisasi interface (RS-232), mengukur besar
variabel terukur (kelembaban dan amonia) dan menghitung besarnya setpoint suhu
melalui model yang ada, untuk loop sebelah luar.
Kemudian mengukur variabel terkontrol, membandingkan variabel
terkontrol dengan setpoint, menghitung besarnya koreksi melalui mode kontrol
yang digunakan, dan penentuan keputusan logik untuk disampaikan ke aktuator
untuk melakukan korekasi terhadap kondisi suhu, kelembaban, amonia yang ada,
untuk loop sebelah dalam. Sampling time loop sebelah dalam lebih kecil dari
sampling time loop sebelah luar.
Pengolahan informasi yang dilakukan komputer meliputi penampilan data
basis peternakan, kontrol dan lingkungan, peragaan penyimpanan hasil
pengukuran, perhitungan matematik dan penentuan keputusan logik untuk
disampaikan ke aktuator untuk melakukan koreksi terhadap proses sehingga
menghasilkan variabel terkontrol sesuai dengan setpoint saat itu.
Penerapan Sistem Supervisori Kendali pada Broiler Closed House
Supervisi kontrol adalah mengendalikan beberapa proses kontrol yang
saling bekerjasama tidak terpisah antara satu dengan yang lain. Sistem supervisori
kendali digunakan untuk mengatur, mengkoordinir, dan mengintegrasi unit-unit
kendali. Supervisi kendali adalah mengkoordinir sistem kendali yang terjadi dalam
suatu sistem.
Prinsip kerja supervisi kendali adalah mengkoordinir sistem kendali pada
sistem kontrol secara bersamaan dan bekerjasama pada proses kendali yang ada
yang terdiri dari 1 proses control atau lebih pada tempat yang satu atau lebih dari
satu tempat. misalnya supervisi kontrol suhu maka dalam berbagai modul
pengetahuan diantaranya : control knowledge bisa memilih modus kendali (ON-
OFF PID FUZZY LOGIC dan ANFIS) sesuai keperluan supervisi kendali
lingkungan peternakan yang penggunaannya bisa menggunakan empat (ON-OFF
PID FUZZY LOGIC dan ANFIS), tiga (ON OFF PID FUZZY LOGIC atau PID
FUZZY LOGIC ANFIS), dua (PID FUZZY LOGIC ATAU FUZZY LOGIC
ANFIS) atau Pengetahuan iklim dan lingkungan (musim kemarau dan musim
hujan) di dalam data base sudah tersedia suhu, kelembaban dan amonia yang ideal

139
pada musim kemarau dan musim hujan, ketika pergantian musim tidak perlu lagi
ada perubahan suhu musim kemarau dan hujan cukup supervisi kendali yang
bekerja secara otomatis yang sudah diprogramkan sebelumnya diiklim modus
iklim.
Pengetahuan broiler closed house (bobot ayam dari umur DOC-panen
sudah disimpan dalam data base supervisory control, jumlah pakan,jumlah air
minum). Pengetahuan Input/output (sensor, transduser, actuator) berfungsi untuk
menyimpan semua karakteristik yang relevan dan penggunaan kebutuhan misalnya
karakteristik sensor. Perancangan supervisory control mempunyai tiga parameter
suhu, kelembaban dan ammonia. Pada kondisi iklim dan lingkungan pada musim
kemarau dipergunakan modus kendali PD untuk suhu, PI untuk kelembaban,
sedangkan musim hujan dipergunakan PID untuk suhu, PID untuk kelembaban.
Alasan pada musim kemarau suhu kelembaban sangat fluktuatif dan ammonia
ketebalan masih rendah. Sedangkan musim hujan suhu kelembaban fluktuatif dan
ammonia tebal. Pada tahapan berikutnya disimulasikan dalam kandang ayam baik
ada ayam masa starter-finisher. Kemudian dibandingkan dengan simulasi dalam
kandang ayam yang kosong (tidak ada ayam).
Dalam perancangan supervisory kendali pada broiler house yang
dipengaruhi oleh konveksi dan konduksi dengan menggunakan modus control yang
menyesuaikan kondisi iklim dan lingkungan yang ada adalah pengontrolan
lingkungan kandang ayam broiler dengan ayam broiler.
Untuk satu variabel menggunakan modus kontrol ON OFF, PID, Fuzzy
Logic, ANFIS dengan salah satu dikontrol suhu, kelembaban dan amonia. Suhu
dikontrol pada waktu pagi, siang dan sore Bila ada salah satu kandang ayam panen
(tidak ada ayam) supervisori kontrol bisa digunakan dengan kandang ayam yang
lain yang mulai terisi ayam dikandang ayam tanpa membuat modus control yang
ada karena sudah bekerja secara otomatis.
Dalam merancang simulasi supervisori kendali yang terdiri dari ON-OFF, PID,
Fuzzy Logic dan ANFIS suhu kelembaban dan amonia. Sistem pengendali PID
yang nilai gain proportional (Kp), integral (Ki), dan derivative nya (kd) dan logika
fuzzy menentukan member function, fuzzifikasi dan defuzzyfikasi. Nilai gain PID
yang optimum dicari sebagai nilai acuan PID controller untuk kendali kecepatan
motor induksi. Pencarian nilai PID tersebut menggunakan metode Ziegler-Nichols
140
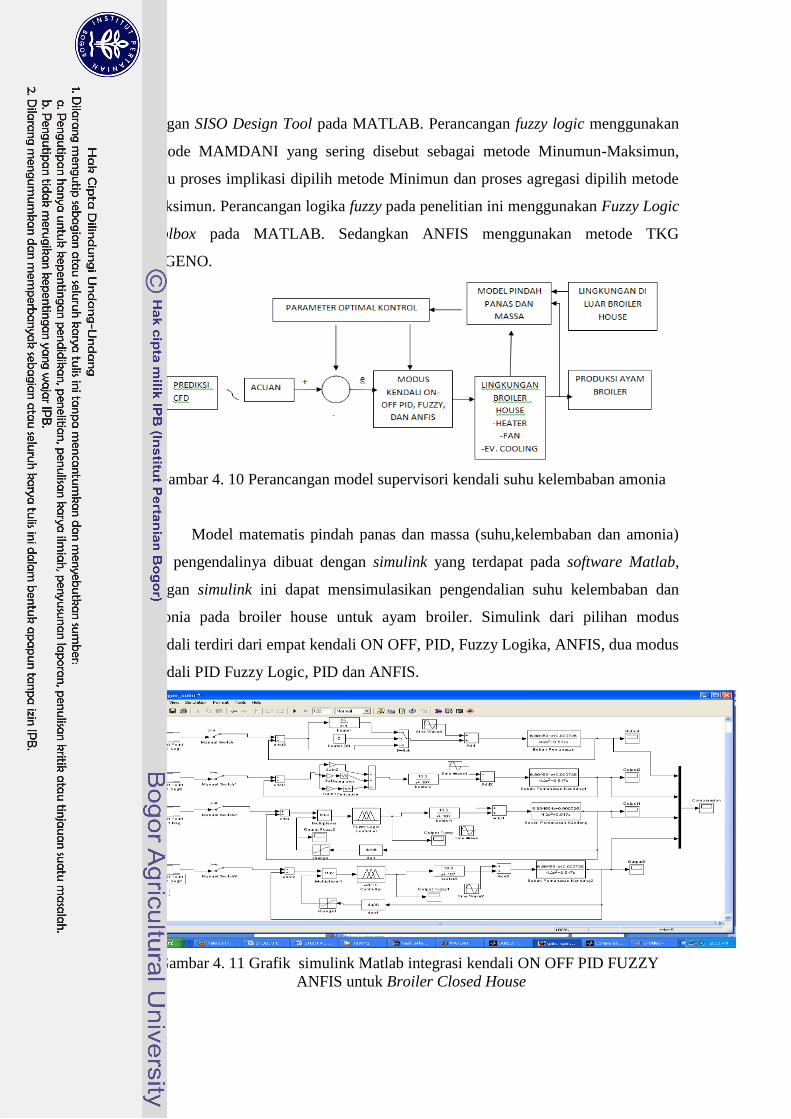
dengan SISO Design Tool pada MATLAB. Perancangan fuzzy logic menggunakan
metode MAMDANI yang sering disebut sebagai metode Minumun-Maksimun,
yaitu proses implikasi dipilih metode Minimun dan proses agregasi dipilih metode
Maksimun. Perancangan logika fuzzy pada penelitian ini menggunakan Fuzzy Logic
Toolbox pada MATLAB. Sedangkan ANFIS menggunakan metode TKG
SUGENO.
Gambar 4. 10 Perancangan model supervisori kendali suhu kelembaban amonia
Model matematis pindah panas dan massa (suhu,kelembaban dan amonia)
dan pengendalinya dibuat dengan simulink yang terdapat pada software Matlab,
dengan simulink ini dapat mensimulasikan pengendalian suhu kelembaban dan
amonia pada broiler house untuk ayam broiler. Simulink dari pilihan modus
kendali terdiri dari empat kendali ON OFF, PID, Fuzzy Logika, ANFIS, dua modus
kendali PID Fuzzy Logic, PID dan ANFIS.
Gambar 4. 11 Grafik simulink Matlab integrasi kendali ON OFF PID FUZZY
ANFIS untuk Broiler Closed House
141
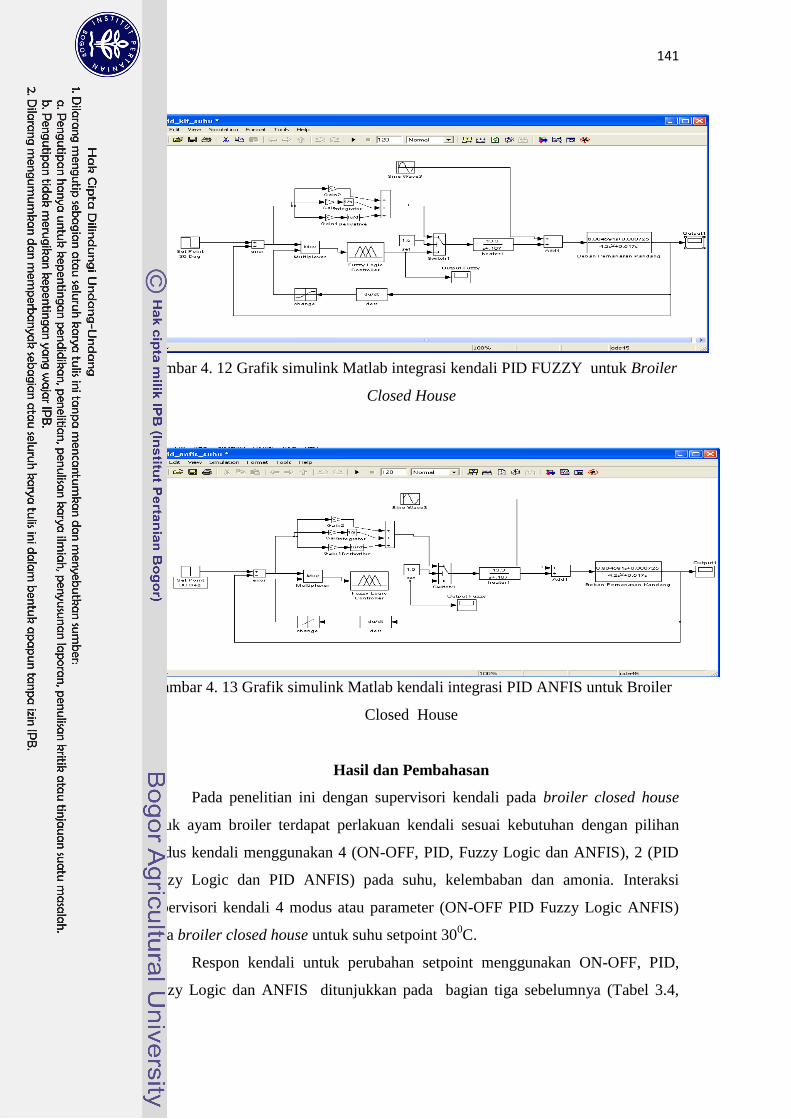
Gambar 4. 12 Grafik simulink Matlab integrasi kendali PID FUZZY untuk Broiler
Closed House
Gambar 4. 13 Grafik simulink Matlab kendali integrasi PID ANFIS untuk Broiler
Closed House
Hasil dan Pembahasan
Pada penelitian ini dengan supervisori kendali pada broiler closed house
untuk ayam broiler terdapat perlakuan kendali sesuai kebutuhan dengan pilihan
modus kendali menggunakan 4 (ON-OFF, PID, Fuzzy Logic dan ANFIS), 2 (PID
Fuzzy Logic dan PID ANFIS) pada suhu, kelembaban dan amonia. Interaksi
Supervisori kendali 4 modus atau parameter (ON-OFF PID Fuzzy Logic ANFIS)
pada broiler closed house untuk suhu setpoint 300C.
Respon kendali untuk perubahan setpoint menggunakan ON-OFF, PID,
Fuzzy Logic dan ANFIS ditunjukkan pada bagian tiga sebelumnya (Tabel 3.4,

142
3.5, 3.6, dan 3.7) sebagai kinerja proses kendali (Time Delay , Rise Time, Waktu
Puncak, Waktu Perkenalan dan Overshoot Peak).
Simulasi Supervisori Kendali Suhu pada Broiler Closed House Periode
Starter, Grower dan Finisher
Berdasarkan standar manajemen peternakan ayam broiler terdapat tiga fase
pemeliharaan : starter 0-3 minggu ( 0-21 hari) suhu 30-26 0C, grower 3-6 minggu
(21-42 hari) suhu 24-230 C dan finisher 6 minggu hingga dipasarkan (42-51 hari)
suhu 18-210 C.
Pada grafik-grafik berikut, grafik fungsi berwarna biru adalah kendali ON-
OFF, warna hijau adalah kendali PID, warna merah adalah kendali Fuzzy Logic,
dan warna kuning adalah kendali ANFIS. Pada grafik respon integrasi supervisori
kendali dengan empat modus kendali , tiga modus kendali, dua modus kendali
periode starter, grower dan finisher di bawah ini :
Integrasi Supervisori Kendali dengan Empat Modus Kendali
Gambar 4.14 Respon integrasi supervisorik kendali empat modus
kendali(ON-OFF PID Fuzzy Logic ANFIS) suhu setpoint 300C periode Starter
umur 0-18 hari

143
Gambar 4. 15. Integrasi supervisori kendali empat modus kendali (ON OFF, PID, FUZZY,
ANFIS) kelembaban dengan setpoin 60 % periode Grower umur 19-30 hari
Gambar 4. 16 Integrasi supervisori kendali empat modus kendali untuk NH3
setpoint 10 ppm Grower umur 19-30 hari dan periode finisher umur 31-46 hari
Integrasi Supervisori Kendali dengan Tiga Modus Kendali
Gambar 4. 17 Supervisori kendali tiga modus kendali (ON-OFF PID Fuzzy Logic)
suhu setpoin 250C Grower umur 19-30 hari

144
Gambar 4. 18 Respon integrasi supervisori kendali PID Fuzzy ANFIS parameter
kelembaban 60% periode finisher umur 31-46 hari
Gambar 4. 19 Respon integrasi supervisori kendali 3 modus kendali PID Fuzzy ANFIS
amonia 10 ppm Grower umur 19-30 hari dan periode finisher umur 31-46 hari
Integrasi Supervisori Kendali dengan Dua Modus Kendali
Gambar 4. 20 Respon supervisori kendali dua modus PID Fuzzy suhu 20
0C periode
finisher umur 31-46 hari

145
Gambar 4. 21 Integrasi supervisori kendali dua modus PID ANFIS kelembaban
setpoint 70% periode Starter umur 0-18 hari
Gambar 4. 22 Integrasi supervisori kendali dua modus PID Fuzzy Amonia setpoin
10 ppm Grower umur 19-30 hari dan periode Finisher umur 31-46 hari
Simulasi integrasi supervisori kendali dengan empat modus pada suhu,
kelembaban dan amonia rata-rata kinerja kendali relatif baik yaitu waktu tunda
(Td) nilainya 1 detik, Waktu penetap (Ts) antara 20 sampai 30 detik, Waktu naik
Tr 0-1 detik, Persen Lonjakan (Os) 15 sampai 120 % dan Error steady state (Ess) 0-
1 %. Simulasi di atas memberikan pilihan modus kendali sesuai kebutuhan di
broiler closed house, yaitu teridiri dari empat modus kendali, tiga modus kendali
dan dua modus kendali dengan parameter lingkungan suhu, kelembaban dan
amonia yang penggunaan terdapat dua broiler house atau dua broiler house.
Penerapan sistem supervsisori kendali lingkungan broiler closed house terdapat:
pengetahuan broiler closed house, pengetahuan kendali, pengetahuan lingkungan.

146
Untuk penerapan kendali menggunakan kendali penjadwalan gain adaptasi (PGA)
merupakan kendali yang paling banyak digunakan dalam industri peternakan ayam.
Kendali ini bekerja dengan mengadaptasi gain kendali sesuai dengan perubahan
kondisi operasi suatu proses di broiler closed house dan algoritma sesuai Gambar
4.7. Pengoperasian kendali broiler closed house terdapat tiga skenario periode
yaitu starter, grower dan finisher.
Pada broiler house pertama fase pengisian DOC starter maka suhu rata-rata
34 0C, 31
0C, 32
0C maka aktuator difungsikan pemanas (heater), untuk menaikkan
atau menurunkan suhu, pendingin (evavorating cooling) untuk menaikkan atau
menurunkan kelembaban dan kipas angin (fan) untuk menaikkan atau menurunkan
amonia. Bila suhu di bawah suhu starter maka heater akan menyala sampai
mendekati setpoint 30 0C apabila di atas setpoin maka yang bekerja evavorating
cooling sehingga terjadi penguapan secara otomatis kelembaban tinggi mendekati
setpoin 50 % dan untuk amonia akan selalu bertambah karena fises ayam dalam hal
ini kipas angin menyala terus-menerus.
Broiler closed house pertama, penerapan menggunakan empat modus
kendali suhu, kelembaban, dan amonia yaitu secara bergantian selama 24 jam di
musim hujan, pagi siang malam hari antara jam 19.00-jam 01.00 jam 02.00-07.00
suhu terjadi fluktuatif suhu luar dingin mempengaruhi suhu ruangan, maka bisa
digunakan modus kendali ON-OFF untuk siang hari, PID pagi hari, Fuzzy Logik
malam hari jam 19.00-jam 01.00 dan ANFIS jam 02.00-07.00.Untuk kendali
kelembaban cukup menggunakan PID dan Fuzzy Logic, sedangkan kendali amonia
menggunakan ON-OFF, PID, Fuzzy Logic dan ANFIS.
Broiler closed house kedua, fase finisher untuk panen atau pengeluaran
ayam pekan 5 dan pekan 6 dalam broiler house untuk di pasarkan. Suhu dibutuhkan
sesuai 18-210C maka heater tidak dinyalakan, tapi evavorating cooling dan kipas
angin menyala dengan menfungsikan empat modus kendali ON-OFF, PID,Fuzzy
Logic dan ANFIS untuk kendali kelembaban dan kendali amonia.
Untuk respon kendali pada empat modus dan dua modus kendali
menggunakan kendali adaptif model acuan (AMA) pada gambar 48 di atas.
Alasannya karena ayam broiler sangat pekah terhadap lingkungan baik suhu ,
kelembaban dan gas amonia yang bisa mendatang stress dan kematian sehingga
diharapkan berperilaku seperti model acuan (model reference) yang mempunyai

147
tanggapan yang lebih cepat dan kestabilan yang lebih mantap. Oleh karena itu
sistem ini keempat modus kendali ON-OFF, PID, Fuzzy Logik dan ANFIS selama
35 hari masa starter, grower dan finisher. Dari hasil respon kestabilan dari proses
kendali lingkungan keempat kendali yang stabil dan memberikan standar kinerja
kendali terdiri dari: Time Delay, Rise Time, Peak Time, Error Steady State dan
Overshoot Peak.
Penelitian ini mengintegrasikan supervisori kendali dengan empat modus
kendali, tiga modus kendali, dua modus kendali secara bersamaan kendali sebagai
bagian dari dengan parameter suhu, kelembaban dan amonia, pengetahuan, broiler
knowledge, climatc & environmental knowledge & control knowledge dengan
peralatan sensor, heater, fan, humidifiyer dan evavorating cooling. Dalam
pengembanagn pembahasan pada sistem supervisori kendali diperlukan
interkoneksi lebih dari satu broiler closed house maka dibahas pada bab lima.
Simpulan
1. Respon kendali ON-OFF, PID, Fuzzy Logic dan ANFIS menghasilkan waktu
naik, persen lonjakan, waktu penetap, error steady state, waktu tunda sesuai
parameter respon ON-OFF, PID, Fuzzy Logic dan ANFIS. Hasil pengujian baik
pada model suhu dan kelembaban yang dikehendaki dalam masa pemeliharaan
di tiga skenario starter, grower dan finisher dapat diperoleh dengan baik tanpa
gangguan isolasi yang berarti. Daya pemanas kandang ayam masa starter rata-
rata 297.000 Watt dan masa grower, finisher membutuhkan 5.400 Watt.
2. Respon supervisori kendali dari empat kendali ON-OFF, PID, Fuzzy Logic dan
ANFIS mennujukkan kestabilan yang optimal pada modus kendali ON-OFF,
PID, Fuzzy Logic dan ANFIS dari skenario starter, grower dan finisher dapat
modus kendali menggunakan kendali adaptif model acuan (AMA).
3. Dengan penerapan dua broiler house maka dapat diperlakukan kendali
penjadwalan gain adaptasi (PGA) sesuai tiga scenario fase starter, grower dan
finisher.
Saran
Pada pengembangan kendali integrasi dengan beberapa modus kendali
(satu, dua, tiga dan empat modus kendali) dalam penelitian berikutnya bisa

148
dikembangkan dengan interkoneksi supervisori kendali dengan dua broiler haouse
atau tiga broiler closed house.
Daftar Pustaka
Alimuddin, Seminar KB, Subrata IDM, Sumiati.2010. Critical Information Design
for House Broilers Used by Artificial Neural Network Proceeding
Konferensi Internasional AFITA, 4-7 oktober 2010, Bogor.
Alimuddin, Seminar KB, Subrata IDM, Nomura N Sumiati. 2011. A Supervisory
Control system for Temperature and Humidity in a Closed House Model for
Broilers, International Journal of Electrical and Computer Sciences IJECS-
IJENS Vol:11 No.06 ISSN: 2077-1231.
Alimuddin, Seminar KB, Subrata IDM, Nomura N, Sumiati. 2012. ANFIS Control
Of Environmental Parameter Temperature On Closed House System Model
For Broilers, akan terbit jurnal TELKOMNIKA Indonesia Journal
Electrical Engineering, Vol. 1 no 10.april 2012, ISSN: 1693-6930
accredited by DGHE (DIKTI), Decree No: 51/Dikti/Kep/2010,Yogyakarta,
Indonesia
Amrullah IK. 2004. Nutrisi Ayam Broiler Edisi Ke 2. Lembaga Satu Gunungbudi,
Bogor
[ PCP I] P T Ch a ro en Phokphand Indonesia, Co. ltd.1 9 9 4 . C ar a
P em el ih ar aa n A yam P ed ag in g . Jakarta.
Borges, SA, Sillva FD, Aiorka AM, Hooge DM and Cummings KR. 2004. Effects
of Diet and Cyclic Daily Heat Stress on Electrolyte, Nitrogen and Water
Intakre, Excretion and Retention by Colostomized Male Broiler
Chickens. Journal Poultry Science 3 :313-321
Bachri SHM. 2004. Sistem Kendali Hybrid Pid - Logika Fuzzy Pada Pengaturan
Kecepatan Motor DC. Makara, Teknologi, Vol. 8, No. 1, April : 25-34
Cooper MA and Washburn KW.1998. The Relationships of Body Temperature
to Weiht Gain, Feed Consumption, and Feed Utilization in Broilers
Under Heat Stress. Poultry Science 77 :237-242
Endra J and Deddy CA. 2011. Transient Response Improvement of PID Controller
Guo SM, Shieh LS, Lin CF, Chandra J. 2001. Adaptive Control for Nonlinear
Stochastic Hybrid Systems with Input Saturation. Electronic paper from
IEEE,.
Handoko. 1995. Klimatologi Dasar Edisi ke 2. Jakarta. PT Dunia Pustaka Jaya.
Hery. 2009. Pentingnya Aspirin dan Vitamin C . http://broilerkita.blogspot.com [3
Maret 2009]
Hong Y,Wang HO,Bushnell LG. 2001. Adaptive Finite-Time Control of Nonlinear
Systems. Departemen Electrical Of Computer Engineering. Duke
University, Durham, American Control Conference, Proceeding
http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=945626
Isermann R, Lachman KH, Matko D. 1992. Adaptive Control Systems Prentice-
Hall,
Joelianto E. and Sitanggang PH 2009, A Substractive Clustering Based Fuzzy
Hybrid Reference Control Design for Transient Response Improvement of
PID Controller, ITB Journal of Engineering Science, Vol. 41, No. 2, pp.
167-186.

149
Joelianto E. and Williamson D. 2009. Transient Response Improvement of
Feedback Control Systems using Hybrid Reference Control, International
Journal of Control, 82(10), 1955-1970, 2009.
Murtidjo, B. A. 2006. Pengendalian Hama dan penyakit ayam. Kanisius.
Yogyakarta.
Seminar KB. 1998. Integrating Fuzzy & PID Control Techniques for Plant Cropping
Management in a Greenhouse, Proceeding Conference Faculty of Engineering,
University of Indonesia,Quality and Research Electrical Engineering, ISBN,979-
8427-18-1.
Sadjad SR.2004. Sistem Kendali Adaptif untuk Kendalian Tak Linier, Research
Grant TPSDP S-1 Electrical Engineering, Batch 2, Jurusan Teknik Elektro
UNHAS, Makassar.
Tai C, Tsao TC. 2000. Adaptive Nonlinear Feedforward Control of an
Electrohydraulic Camless Velvetrain. Proc. Of American Control
Conference, Chicago, Illinois,
Van JDV.1994. Feedback Control System, 3rd
Ed., Prentice Hall Inc. Englewood
Cliffs, New Jersey,
Y. Hong, H. O. Wang, L. G. Bushnell. 2001. Adaptive Finite-Time Control of
Nonlinear Systems. Electronic paper from Dept. Electrical Of Computer Eng.
Duke University, Durham, American Control Conference, Proceedings
http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=945626
Zhen Yu Zhao, Masoyorki Tomizuka and Satoru. 1993. Fuzzy gain scheduling of
PID Controllers, IEEE, Trans on System, Man and Cyberling, Vol.23, No.5,
Sept/Okt.
Zhao J, Kanellakopoulos I. 1997. Discrete-Time Adaptive Control of Output
Feedback Nonlinear Systems. Proc. Of The 36th
IEEE Conference on
Decision and Control, San Diego, CA.

150
DAFTAR ISI 4 INTEGRASI SIMULASI SUPERVISORI KENDALI SUHU KELEMBABAN DAN
AMONIA PADA CLOSED HOUSE UNTUK AYAM BROILER ............................... 125
Pendahuluan .............................................................................................................. 127
Metode Yang Digunakan ............................................................................................ 137
Hasil dan Pembahasan ................................................................................................ 141
Simpulan ..................................................................................................................... 147
DAFTAR GAMBAR Gambar 4. 1 Hybrid Kendali PID- Logika Fuzzy ............................................................. 130
Gambar 4. 2 Member Function Input Dan Output ............................................................ 130
Gambar 4. 3 Respon Hybrid kendali PID-Logikan Fuzzy ................................................ 130
Gambar 4. 4 Pelatihan ANFIS Tiruan PID (Zhao 1993) .................................................. 131
Gambar 4. 5 Kendali ANFIS PID (Zhao1993) ................................................................ 132
Gambar 4. 6 Blok Diagram Kendali Hibrid ANFIS PID ................................................ 133
Gambar 4. 8 Kendali Adaptif Model Acuan. .................................................................... 135
Gambar 4. 9 Sistem Supervisori Kendali Lingkungan pada Broiler House ..................... 136
Gambar 4. 13 Grafik Simulink Matlab Kendali PID ANFIS Untuk Broiler House ......... 141
Gambar 4. 14 Respon Integrasi Supervisorik Kendali Empat Modus Kendali ................ 142
Gambar 4. 19 Respon integrasi supervisori kendali 3 modus kendali PID Fuzzy ANFIS
Amonia 10 ppm Grower Umur 19-30 Hari dan Periode finisher Umur 31-46 Hari ......... 144
Gambar 4. 20 Respon Supervisori kendali dua modus PID Fuzzy suhu 200C Periode
finisher Umur 31-46 Hari .................................................................................................. 144
Gambar 4. 21 Integrasi Supervisori Kendali dua modus PID ANFIS Kelembaban ......... 145
Gambar 4. 22 Integrasi Supervisori kendali dua modus PID Fuzzy Amonia setpoin 10 ppm
Grower Umur 19-30 Hari dan Periode finisher Umur 31-46 Hari .................................... 145
DAFTAR TABEL
No table of figures entries found.





























