Embed Size (px)
Citation preview
Regelungstechnik Inhaltsverzeichnis 1
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
Inhaltsverzeichnis
Inhaltsverzeichnis .......................................................................................................................................... 1
1 Statisches Verhalten ............................................................................................................................... 2
1.1 Linearisierung im Kennlinienfeld .................................................................................................... 2
1.2 Regelung im Kennlinienfeld ........................................................................................................... 3
2 Dynamisches Verhalten .......................................................................................................................... 4
2.1 Spezielle Signale ........................................................................................................................... 4
2.2 Gegenüberstellung von Zeit- und Bildbereich ............................................................................... 5
2.3 Pol-/Nullstellendiagramm ............................................................................................................... 6
2.4 Frequenzgang G(j) ...................................................................................................................... 6
2.4.1 Bode-Diagramm ................................................................................................................ 6
2.4.2 Ortskurve des Frequenzgangs ......................................................................................... 7
2.5 Minimalphasensystem und Allpaß ................................................................................................. 8
3 Wirkungsplan .......................................................................................................................................... 9
4 Stabilität ................................................................................................................................................ 12
4.1 Asymptotische Stabilität ............................................................................................................... 12
4.2 Ein-/Ausgangsstabilität ................................................................................................................ 12
4.3 Algebraische Stabilitätskriterien .................................................................................................. 12
4.3.1 Kriterium nach Hurwitz .................................................................................................... 12
4.3.2 Kriterium nach Routh ...................................................................................................... 13
4.4 Nyquist-Kriterium (vereinfacht): ................................................................................................... 13
5 Reglersynthese ..................................................................................................................................... 14
5.1 Reglereinstellung nach der Sprungantwort der Regelstrecke ..................................................... 14
5.2 Reglereinstellung nach Schwingversuch ..................................................................................... 15
5.3 Reglereinstellung nach Amplituden- und Phasenreserve ........................................................... 15
5.4 Reglereinstellung mittels Polstellenkompensation ...................................................................... 16
5.5 Betragsoptimum ........................................................................................................................... 16
5.6 Symmetrisches Optimum ............................................................................................................. 17
6 Vermaschte Regelkreise ....................................................................................................................... 18
Anhang ........................................................................................................................................................ 19
A Tabellen zur Laplace-Transformation .......................................................................................... 19
B Bode-Diagramm ........................................................................................................................... 22
C Übertragungselemente ................................................................................................................ 23
Regelungstechnik Statisches Verhalten 2
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
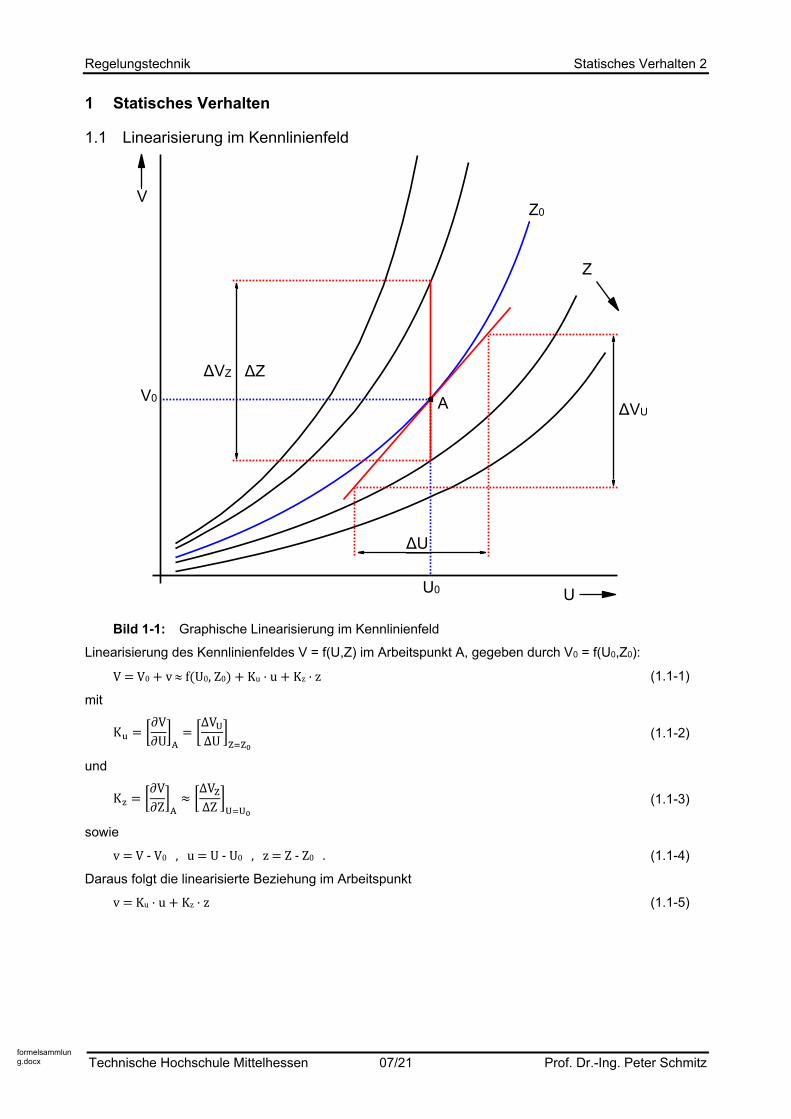
1 Statisches Verhalten
1.1 Linearisierung im Kennlinienfeld
Bild 1-1: Graphische Linearisierung im Kennlinienfeld
Linearisierung des Kennlinienfeldes V = f(U,Z) im Arbeitspunkt A, gegeben durch V0 = f(U0,Z0):
V V0 v f U0, Z0 Ku u Kz z (1.1-1)
mit
K∂V∂U
ΔVΔU
(1.1-2)
und
K∂V∂Z
ΔVΔZ
(1.1-3)
sowie
v V - V0 , u U - U0 , z Z - Z0 . (1.1-4)
Daraus folgt die linearisierte Beziehung im Arbeitspunkt
v Ku u Kz z (1.1-5)
U
V
Z
Z0
U0
ΔU
ΔZ
A V0ΔVU
ΔVZ
Regelungstechnik Statisches Verhalten 3
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
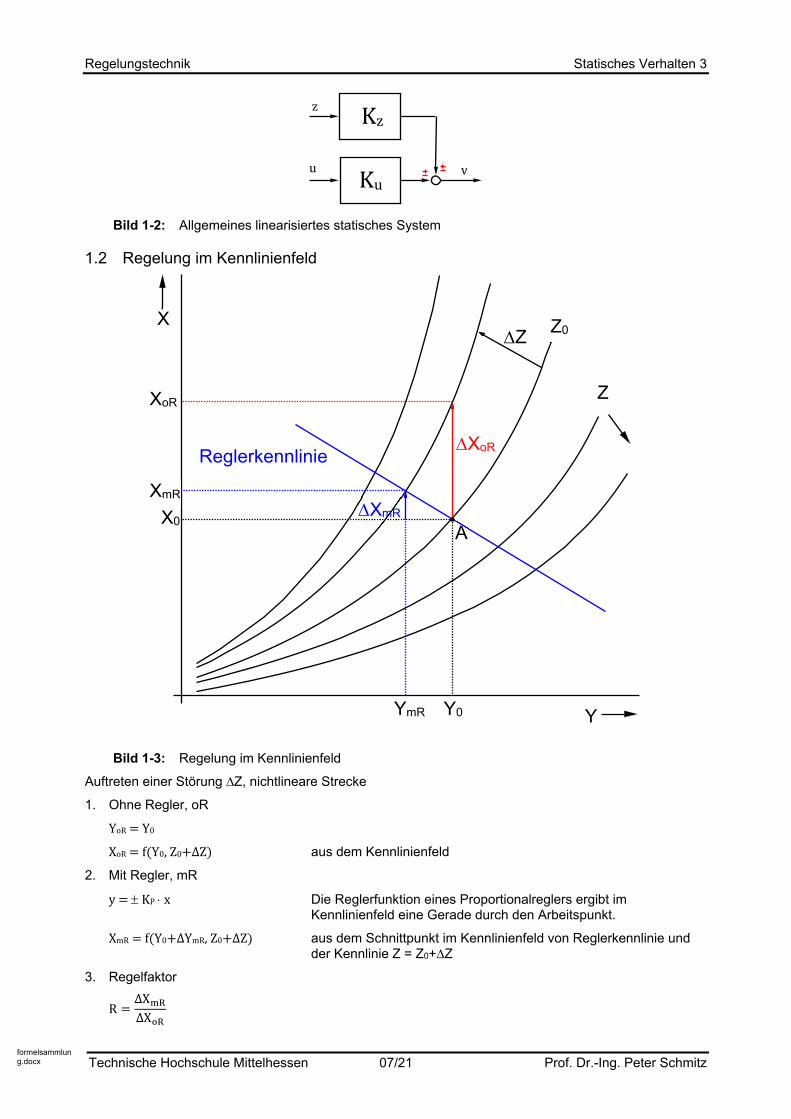
Bild 1-2: Allgemeines linearisiertes statisches System
1.2 Regelung im Kennlinienfeld
Bild 1-3: Regelung im Kennlinienfeld
Auftreten einer Störung ∆Z, nichtlineare Strecke
1. Ohne Regler, oR
YoR Y0
XoR f Y0, Z0 ∆Z aus dem Kennlinienfeld
2. Mit Regler, mR
y KP x Die Reglerfunktion eines Proportionalreglers ergibt im Kennlinienfeld eine Gerade durch den Arbeitspunkt.
XmR f Y0 ∆YmR, Z0 ∆Z aus dem Schnittpunkt im Kennlinienfeld von Reglerkennlinie und der Kennlinie Z = Z0+∆Z
3. Regelfaktor
RΔXΔX
z
u v Ku
Kz
Y
X
Z
Z0
AX0
XoR
Y0
XmR
YmR
XoR
XmR
Z
Reglerkennlinie
Regelungstechnik Dynamisches Verhalten 4
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
2 Dynamisches Verhalten
2.1 Spezielle Signale
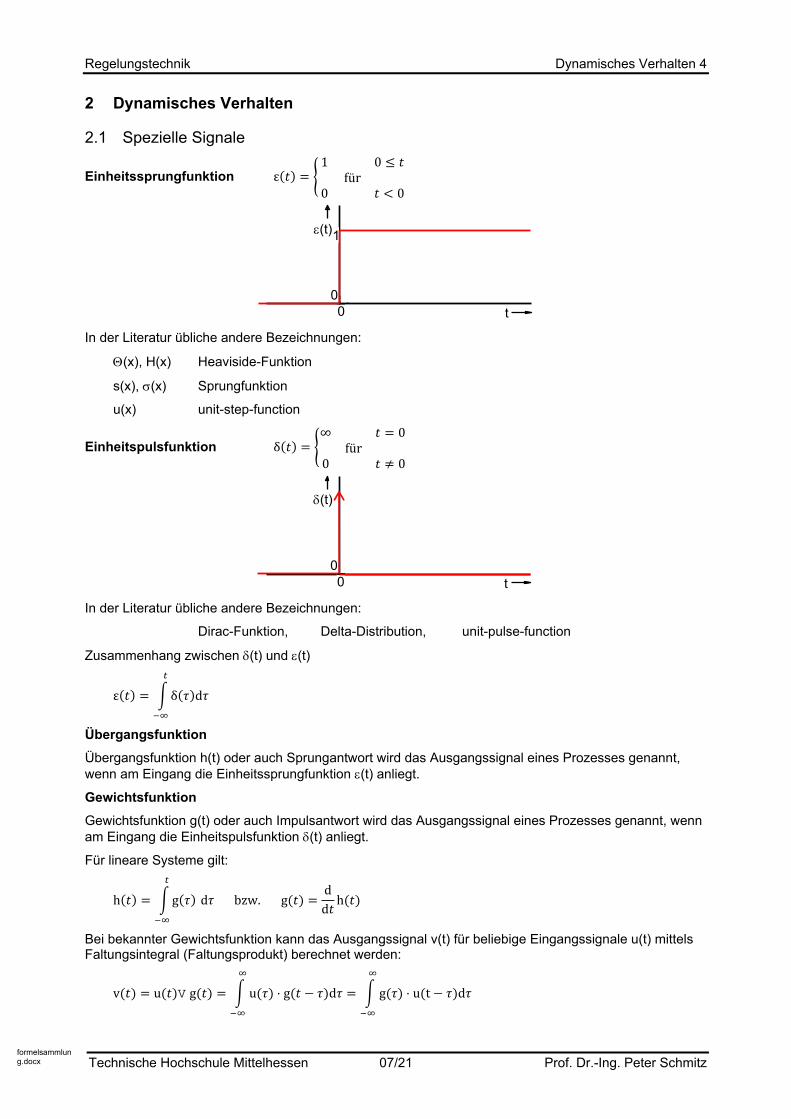
Einheitssprungfunktion ε 𝑡1 0 𝑡
für0 𝑡 0
In der Literatur übliche andere Bezeichnungen:
(x), H(x) Heaviside-Funktion
s(x), (x) Sprungfunktion
u(x) unit-step-function
Einheitspulsfunktion δ 𝑡∞ 𝑡 0
für0 𝑡 0
In der Literatur übliche andere Bezeichnungen:
Dirac-Funktion, Delta-Distribution, unit-pulse-function
Zusammenhang zwischen (t) und (t)
ε 𝑡 δ 𝜏 d𝜏
Übergangsfunktion
Übergangsfunktion h(t) oder auch Sprungantwort wird das Ausgangssignal eines Prozesses genannt, wenn am Eingang die Einheitssprungfunktion (t) anliegt.
Gewichtsfunktion
Gewichtsfunktion g(t) oder auch Impulsantwort wird das Ausgangssignal eines Prozesses genannt, wenn am Eingang die Einheitspulsfunktion (t) anliegt.
Für lineare Systeme gilt:
h 𝑡 g 𝜏 d𝜏 bzw. g 𝑡dd𝑡
h 𝑡
Bei bekannter Gewichtsfunktion kann das Ausgangssignal v(t) für beliebige Eingangssignale u(t) mittels Faltungsintegral (Faltungsprodukt) berechnet werden:
v 𝑡 u 𝑡 � g 𝑡 u 𝜏 ⋅ g 𝑡 𝜏 d𝜏 g 𝜏 ⋅ u t 𝜏 d𝜏
t
(t)
0 0
1
t
(t)
0 0

Regelungstechnik Dynamisches Verhalten 5
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
2.2 Gegenüberstellung von Zeit- und Bildbereich
Zeitbereich Bildbereich
Inverse Laplace-Transformation: Laplace-Transformation:
f 𝑡 ℒ F 𝑠1
2πj lim
→F 𝑠 ⋅ e d𝑠 F 𝑠 ℒ f 𝑡 f 𝑡 ⋅ e d𝑡 .
Differentialgleichung:
a v 𝑡 ⋯ a v 𝑡 a v 𝑡 b u 𝑡 b u 𝑡 ⋯ b u 𝑡
V 𝑠 ⋅ a 𝑠 ⋯ a 𝑠 a U 𝑠 ⋅ b b 𝑠 ⋯ b 𝑠
Gewichtsfunktion: Übertragungsfunktion:
g t G 𝑠V 𝑠U 𝑠
b b 𝑠 ⋯ b 𝑠a a 𝑠 ⋯ a 𝑠
ba
⋅𝑠 s 𝑠 s ⋯ 𝑠 s𝑠 s 𝑠 s ⋯ 𝑠 s
ba⋅
1 β s 1 β s ⋯ 1 β s1 α s 1 α s ⋯ 1 α s
⋅ s
mit n0, p0 = Anzahl Null-/Polstellen im Ursprung,
m N n0 und n P p0 sowie
b0 ... bx-1 0 und a0 ... ay-1 0
Faltungsprodukt:
v 𝑡 u 𝑡 � g 𝑡 V 𝑠 G 𝑠 ⋅ U 𝑠
Gewichtsfunktion: Übertragungsfunktion:
g 𝑡 g 𝑡 � 𝑡dd𝑡
h 𝑡 G 𝑠 G 𝑠 ⋅ 1 H 𝑠 ∙ 𝑠
Übergangsfunktion:
h 𝑡 u 𝑡 � 𝑡 g 𝜏 d𝜏 H 𝑠 G 𝑠 ⋅1𝑠
Definition: Das Verhältnis der Laplace-transformierten Ausgangsgröße V(s) zur Laplace-transformierten Eingangsgröße U(s) wird Übertragungsfunktion G(s) eines Systems genannt; dabei sind alle Anfangsbedingungen Null.
g(t) u(t) v(t) G(s) U(s) V(s)
Regelungstechnik Dynamisches Verhalten 6
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
2.3 Pol-/Nullstellendiagramm
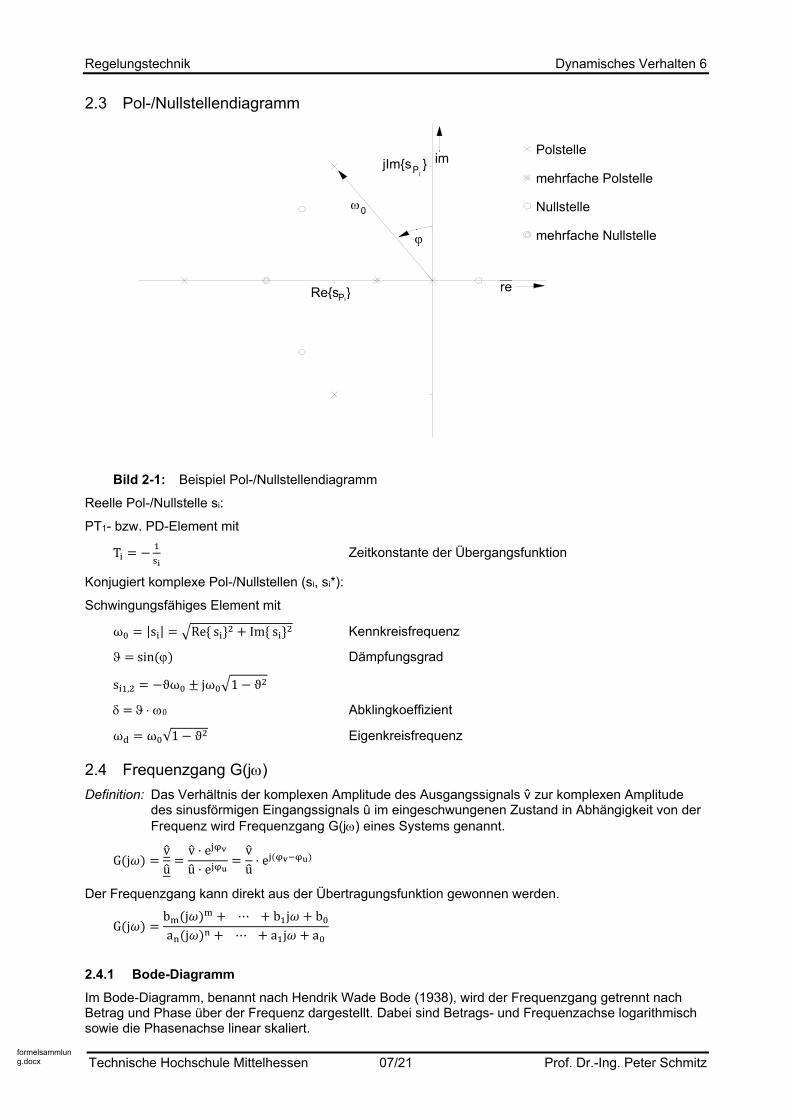
Bild 2-1: Beispiel Pol-/Nullstellendiagramm
Reelle Pol-/Nullstelle si:
PT1- bzw. PD-Element mit
T Zeitkonstante der Übergangsfunktion
Konjugiert komplexe Pol-/Nullstellen (si, si*):
Schwingungsfähiges Element mit
ω |s | Re s Im s Kennkreisfrequenz
sin Dämpfungsgrad
s , ϑω jω 1 ϑ
0 Abklingkoeffizient
ω ω √1 ϑ Eigenkreisfrequenz
2.4 Frequenzgang G(j)
Definition: Das Verhältnis der komplexen Amplitude des Ausgangssignals v̂ zur komplexen Amplitude des sinusförmigen Eingangssignals û im eingeschwungenen Zustand in Abhängigkeit von der Frequenz wird Frequenzgang G(j) eines Systems genannt.
G j𝜔vu
v ⋅ eu ⋅ e
vu⋅ e
Der Frequenzgang kann direkt aus der Übertragungsfunktion gewonnen werden.
G j𝜔b j𝜔 ⋯ b j𝜔 ba j𝜔 ⋯ a j𝜔 a
2.4.1 Bode-Diagramm
Im Bode-Diagramm, benannt nach Hendrik Wade Bode (1938), wird der Frequenzgang getrennt nach Betrag und Phase über der Frequenz dargestellt. Dabei sind Betrags- und Frequenzachse logarithmisch sowie die Phasenachse linear skaliert.
re
im
0
Re{s } Pi
Polstelle
mehrfache Polstelle
Nullstelle
mehrfache Nullstelle
jIm{s } Pi
Regelungstechnik Dynamisches Verhalten 7
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
1. Normierte Darstellung von G(jω)
Die allgemeine Form der Übertragungsfunktion eines linearen Systems ohne Totzeit
G 𝑠V 𝑠U 𝑠
b b 𝑠 ⋯ b 𝑠a a 𝑠 ⋯ a 𝑠
kann nach Berechnung der Pol- und Nullstellen in eine normierte Darstellung des Frequenzgangs überführt werden:
G j𝜔 K ⋅1 T j𝜔 1 T j𝜔 ⋯ 1 T j𝜔
1 T j𝜔 1 T j𝜔 ⋯ 1 T j𝜔⋅ j𝜔
mit einer Sortierung nach der Größe der Zeitkonstanten (bei konjugiert komplexen Zeitkonstanten wird der Betrag verwendet T T ⋯ T und T T ⋯ T . Damit sind automatisch die Eckfrequenzen, als Kehrwerte der Zeitkonstanten, von klein nach groß sortiert.
2. Skalierung des Bode-Diagramms
Die Betragsachse wird abhängig vom erwarteten Wertebereich skaliert, wobei im Zweifelsfall die „1“ in die Mitte der Skala gelegt wird.
Auf der Frequenzachse werden die Eckfrequenzen markiert. Diese werden möglichst mittig plaziert.
3. Zeichnen der Start-Asymptoten
Für kleine ω, d.h. 𝜔 ≪ und 𝜔 ≪ , kann der Frequenzgang durch seine Asymptote
G j𝜔 K ⋅ j𝜔
angenähert werden. In der doppelt logarithmischen Darstellung des Amplitudengangs entspricht dies einer Geraden mit der Steigung p und im Phasengang dem Winkel pꞏ90°. Für die Konstruktion der Geraden im Amplitudengang benötigt man neben der Steigung noch einen Punkt. Diesen erhält man durch Einsetzen eines beliebigen ω-Wertes in die Asymptotengleichung. Diese beiden Start-Asymptoten beginnen am linken Rand des Diagramms und enden bei der ersten auf der Frequenzachse eingezeichneten Eckfrequenz.
4. Vervollständigen der Asymptotenverläufe
Wenn die erreichte Eckfrequenz von einer Polstelle stammt, werden die Steigung des Betragsverlaufs um 1 und die Phase um 90° verringert, stammt die Eckfrequenz von einer Nullstelle, werden die Steigung um 1 und die Phase um 90° vergrößert (bei mehrfachen Pol- bzw. Nullstellen entsprechend mehrfach). Es ergeben sich neue Asymptoten, die wiederum bei der nächsten Eckfrequenz enden. Dies wiederholt sich bis zu rechten Rand des Diagramms.
Zur Kontrolle kann man noch die Asymptote für große ω, d.h. 𝜔 ≫ und 𝜔 ≫ , berechnen
G j𝜔 K ⋅∏ T
∏ T∙ j𝜔
ba
∙ j𝜔
und mit dem Ergebnis der Konstruktion vergleichen.
5. Verbesserung der Genauigkeit des Phasengangs
Im Bereich der Eckfrequenzen ergibt sich durch die Asymptotennäherung eine große Abweichung zum realen Verlauf. Da der Phasenverlauf bei der Eckfrequenz durch die logarithmische Skalierung der Frequenzachse punktsymmetrisch verläuft, kann der Übergang zwischen der linken und der rechten Asymptote mittels Wendetangente erfolgen. Diese hat eine Steigung von ±45°/0,7 Dekaden (bei mehrfachen Pol- bzw. Nullstellen entsprechend ein mehrfaches davon). Überlagern sich die Übergangsbereiche von mehreren Eckfrequenzen addieren sich die Steigungen der Wendetangenten in diesen Bereichen.
2.4.2 Ortskurve des Frequenzgangs
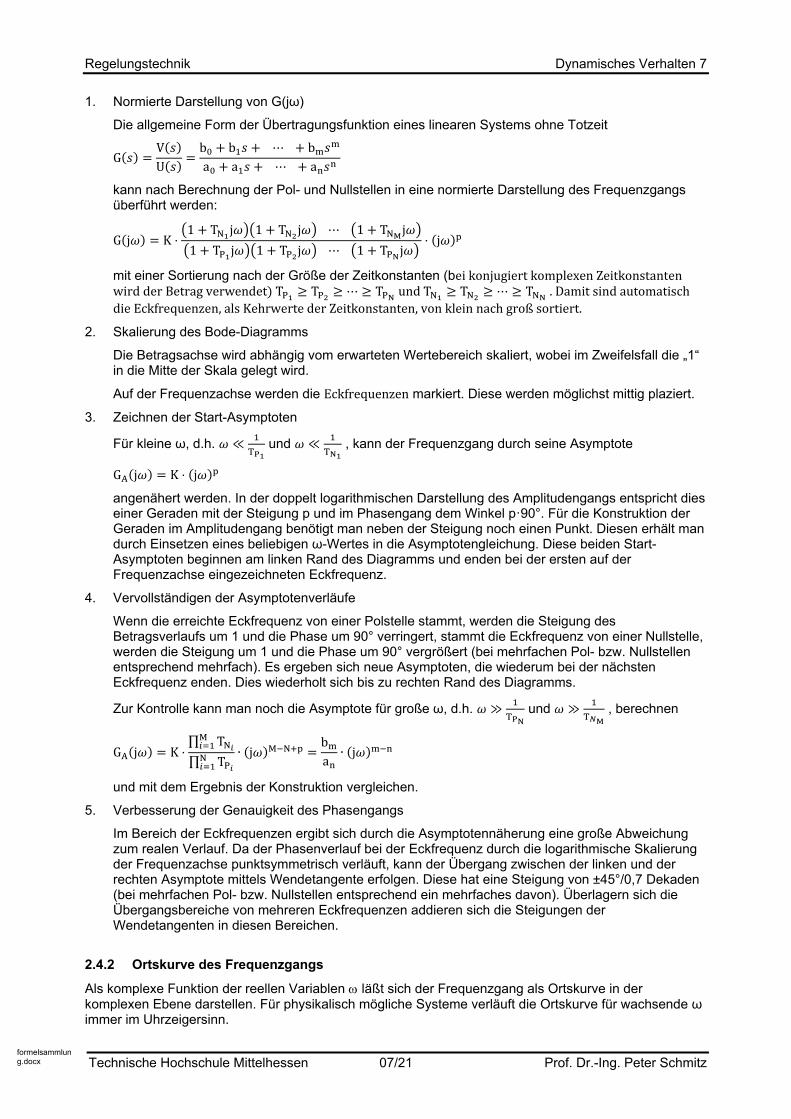
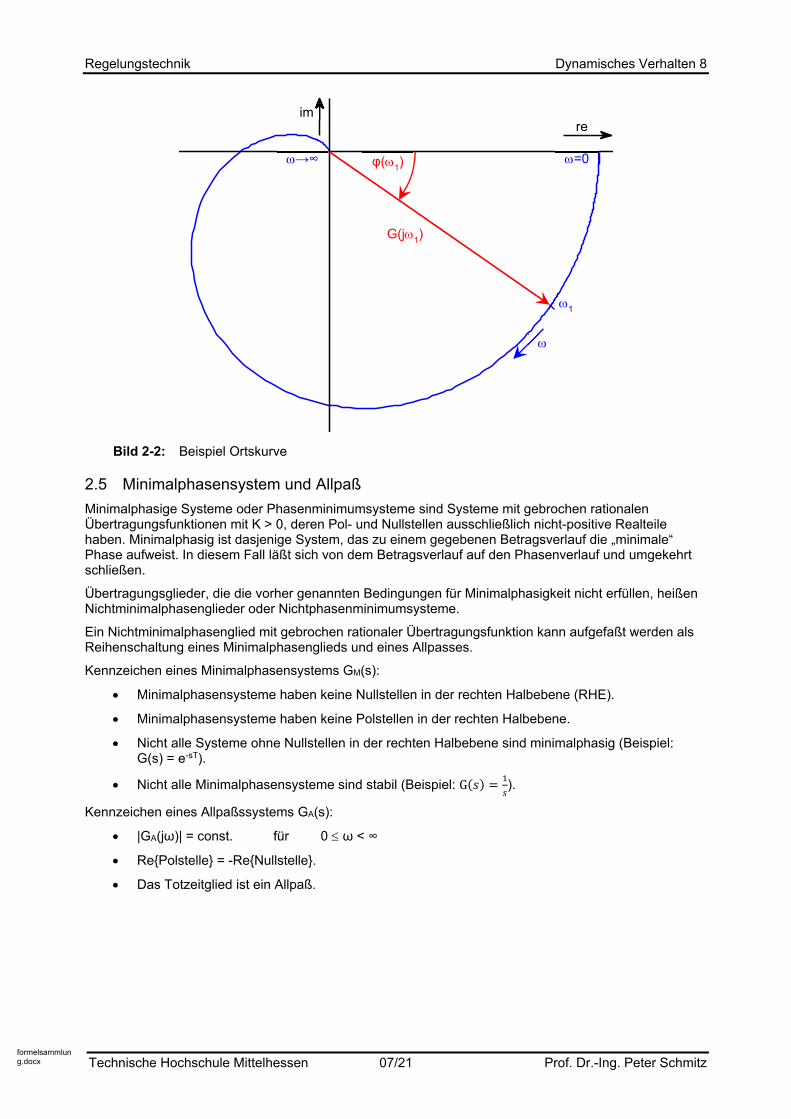
Als komplexe Funktion der reellen Variablen läßt sich der Frequenzgang als Ortskurve in der komplexen Ebene darstellen. Für physikalisch mögliche Systeme verläuft die Ortskurve für wachsende ω immer im Uhrzeigersinn.
Regelungstechnik Dynamisches Verhalten 8
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
Bild 2-2: Beispiel Ortskurve
2.5 Minimalphasensystem und Allpaß
Minimalphasige Systeme oder Phasenminimumsysteme sind Systeme mit gebrochen rationalen Übertragungsfunktionen mit K > 0, deren Pol- und Nullstellen ausschließlich nicht-positive Realteile haben. Minimalphasig ist dasjenige System, das zu einem gegebenen Betragsverlauf die „minimale“ Phase aufweist. In diesem Fall läßt sich von dem Betragsverlauf auf den Phasenverlauf und umgekehrt schließen.
Übertragungsglieder, die die vorher genannten Bedingungen für Minimalphasigkeit nicht erfüllen, heißen Nichtminimalphasenglieder oder Nichtphasenminimumsysteme.
Ein Nichtminimalphasenglied mit gebrochen rationaler Übertragungsfunktion kann aufgefaßt werden als Reihenschaltung eines Minimalphasenglieds und eines Allpasses.
Kennzeichen eines Minimalphasensystems GM(s):
Minimalphasensysteme haben keine Nullstellen in der rechten Halbebene (RHE).
Minimalphasensysteme haben keine Polstellen in der rechten Halbebene.
Nicht alle Systeme ohne Nullstellen in der rechten Halbebene sind minimalphasig (Beispiel: G(s) = e-sT).
Nicht alle Minimalphasensysteme sind stabil (Beispiel: G 𝑠 ).
Kennzeichen eines Allpaßssystems GA(s):
|GA(jω)| = const. für 0 ω < ∞
Re{Polstelle} = -Re{Nullstelle}.
Das Totzeitglied ist ein Allpaß.
=0 →∞
re im
G(j1)
1
φ(1)
Regelungstechnik Wirkungsplan 9
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
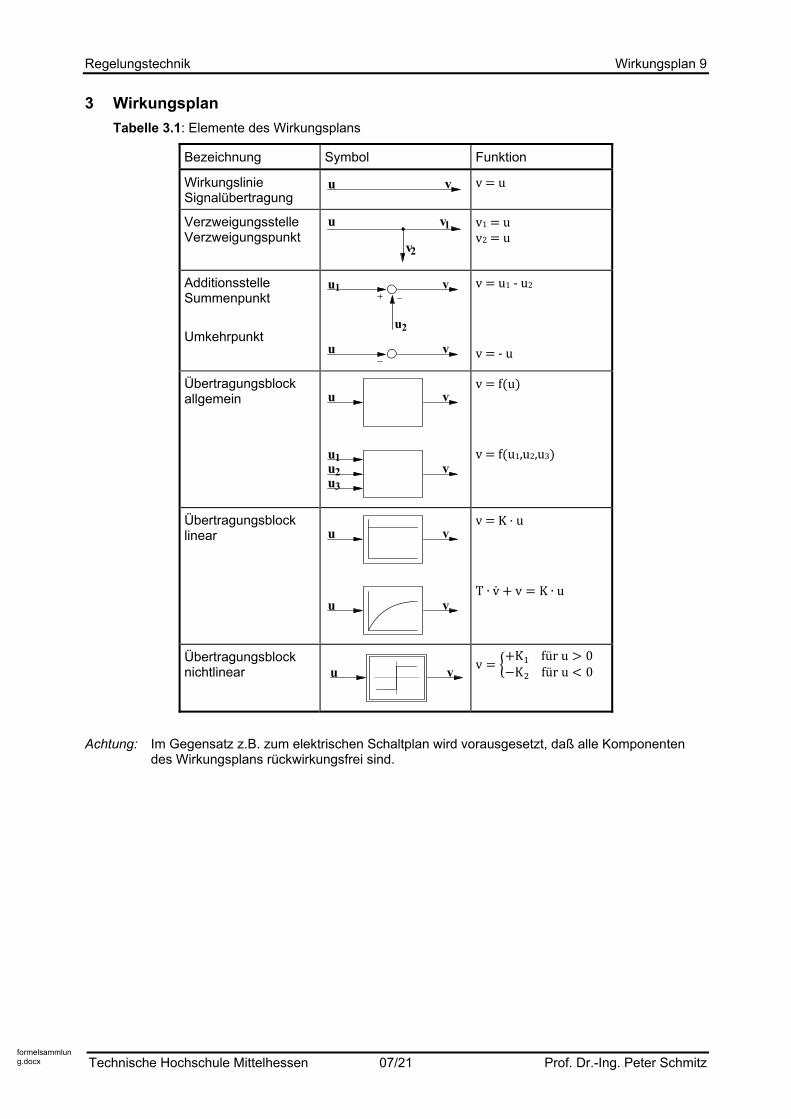
3 Wirkungsplan
Tabelle 3.1: Elemente des Wirkungsplans
Bezeichnung Symbol Funktion
Wirkungslinie Signalübertragung
v u
Verzweigungsstelle Verzweigungspunkt
v1 u v2 u
Additionsstelle Summenpunkt
Umkehrpunkt
v u1 - u2
v - u
Übertragungsblock allgemein
v f u
v f u1,u2,u3
Übertragungsblock linear
v K u
T ∙ v v K ∙ u
Übertragungsblock nichtlinear
vK für u 0K für u 0
Achtung: Im Gegensatz z.B. zum elektrischen Schaltplan wird vorausgesetzt, daß alle Komponenten des Wirkungsplans rückwirkungsfrei sind.
u v
u v1
v2
u v1
u2
u v
u v
u vu
u
123
u v
u v
u v
Regelungstechnik Wirkungsplan 10
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
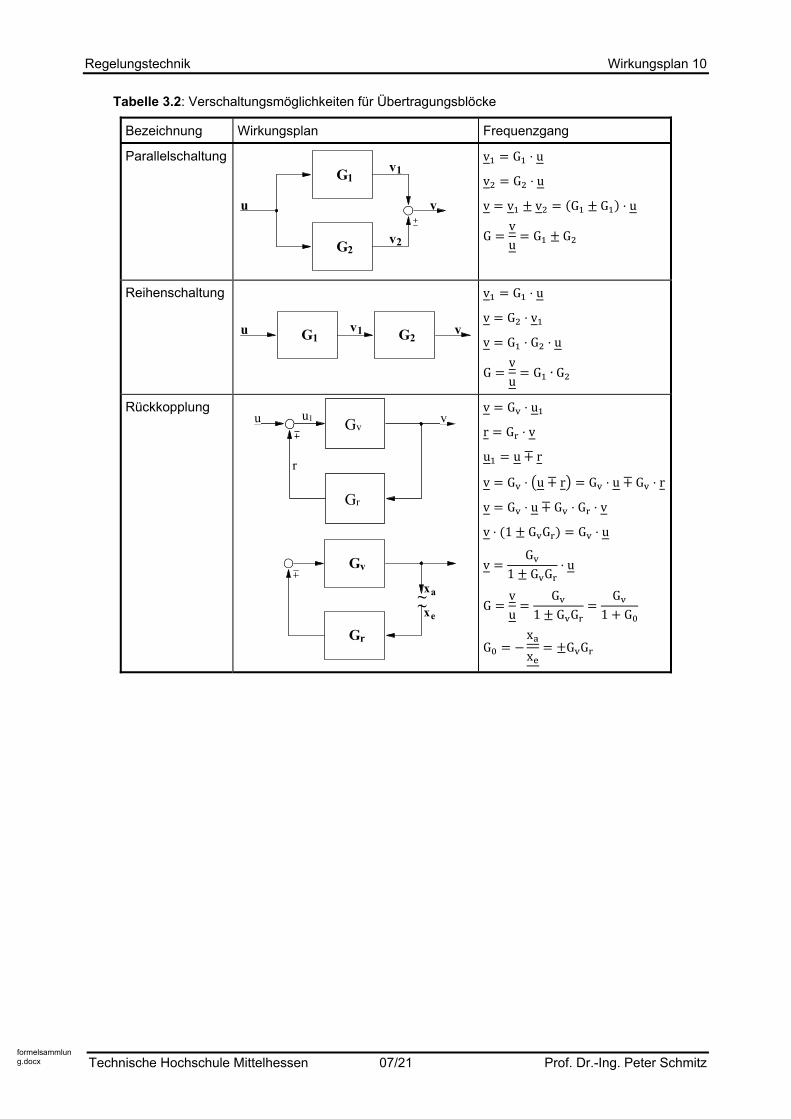
Tabelle 3.2: Verschaltungsmöglichkeiten für Übertragungsblöcke
Bezeichnung Wirkungsplan Frequenzgang
Parallelschaltung
v G ⋅ u
v G ⋅ u
v v v G G ⋅ u
Gvu
G G
Reihenschaltung
v G ⋅ u
v G ⋅ v
v G ⋅ G ⋅ u
Gvu
G ∙ G
Rückkopplung
v G ⋅ u
r G ⋅ v
u u ∓ r
v G ⋅ u ∓ r G ⋅ u ∓ G ⋅ r
v G ⋅ u ∓ G ⋅ G ⋅ v
v ⋅ 1 G G G ⋅ u
vG
1 G G⋅ u
Gvu
G1 G G
G1 G
Gx
xG G
u v
G2
G1v1
v2
u v v1G1 G2
xe
xa~~
Gv
Gr
u1 v u
r
Gr
Gv
Regelungstechnik Wirkungsplan 11
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
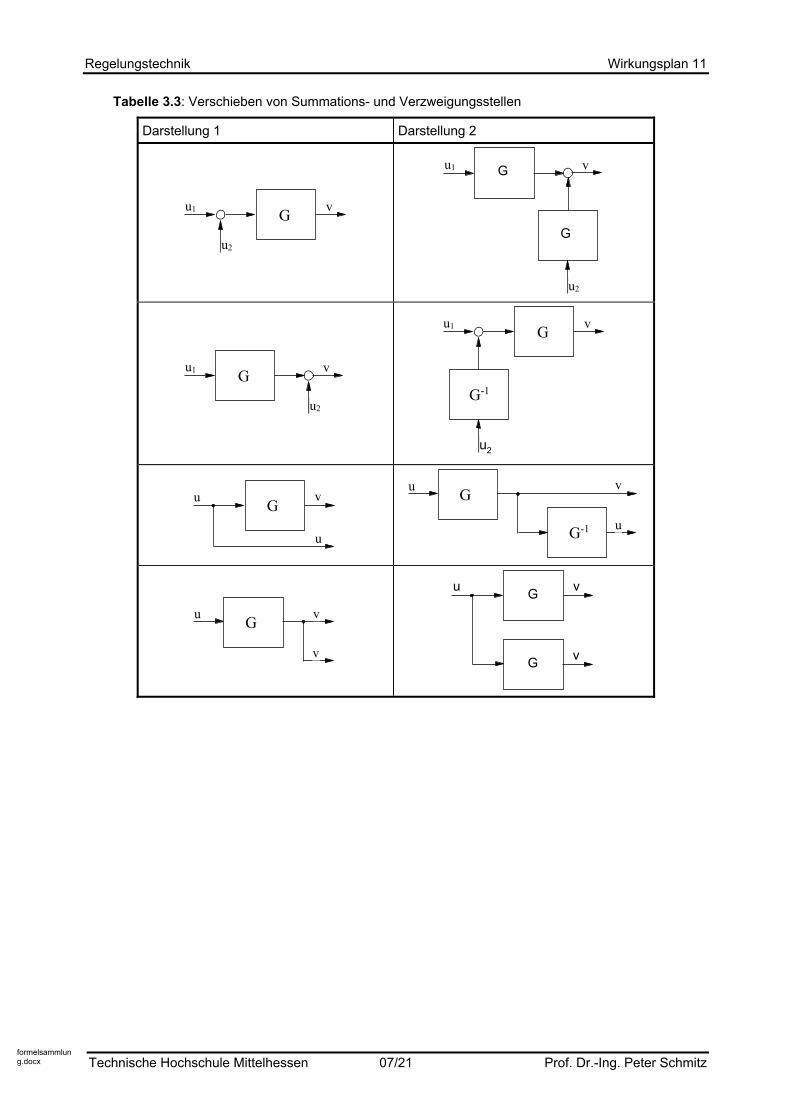
Tabelle 3.3: Verschieben von Summations- und Verzweigungsstellen
Darstellung 1 Darstellung 2
u1 v G
u2
u1 v
u2
G
G
u1 v G
u2
u1 v G
u2
G-1
u v G
u
u v G
G-1 u
u v G
v
v G
G v
u
Regelungstechnik Stabilität 12
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
4 Stabilität
4.1 Asymptotische Stabilität
Definition: Ein lineares, zeitinvariantes System heißt asymptotisch stabil, wenn die Lösung v(t) der homogenen Zustandsdifferentialgleichung für einen beliebigen Anfangszustand für t → gegen Null geht.
Dies ist gleichbedeutend mit der Bedingung, daß alle Nullstellen des charakteristischen Polynoms negative Realteile haben müssen. Diese Nullstellen sind identisch mit den Polstellen der Übertragungsfunktion.
4.2 Ein-/Ausgangsstabilität
Definition: Ein lineares, zeitinvariantes System heißt Ein-/Ausgansstabil oder BIBO–stabil, wenn für verschwindende Anfangszustände und ein beliebiges beschränktes Eingangssignal |u(t)| < umax für alle t > 0 das Ausgangssignal beschränkt bleibt: |v(t)| < vmax für alle t > 0.
Aus der Berechnung von v(t) mittels Faltungsintegral folgt:
d)(gudu)(gd)t(u)(gd)t(u)(g)t(v maxmax
d)(g
Dies ist gleichbedeutend mit der Bedingung lim→
g t 0.
Ein asymptotisch stabiles System ist immer auch BIBO-stabil (BIBO: Bounded Input Bounded Output).
4.3 Algebraische Stabilitätskriterien
Untersucht wird die homogene Differentialgleichung des Systems (geschlossener Regelkreis)
a v t a v t a v tn
n( )
( ) ( ) ( ) 1 0 0 .
Sind alle Bedingungen des entsprechenden Kriteriums erfüllt, dann ist das System stabil. Andernfalls ist es instabil.
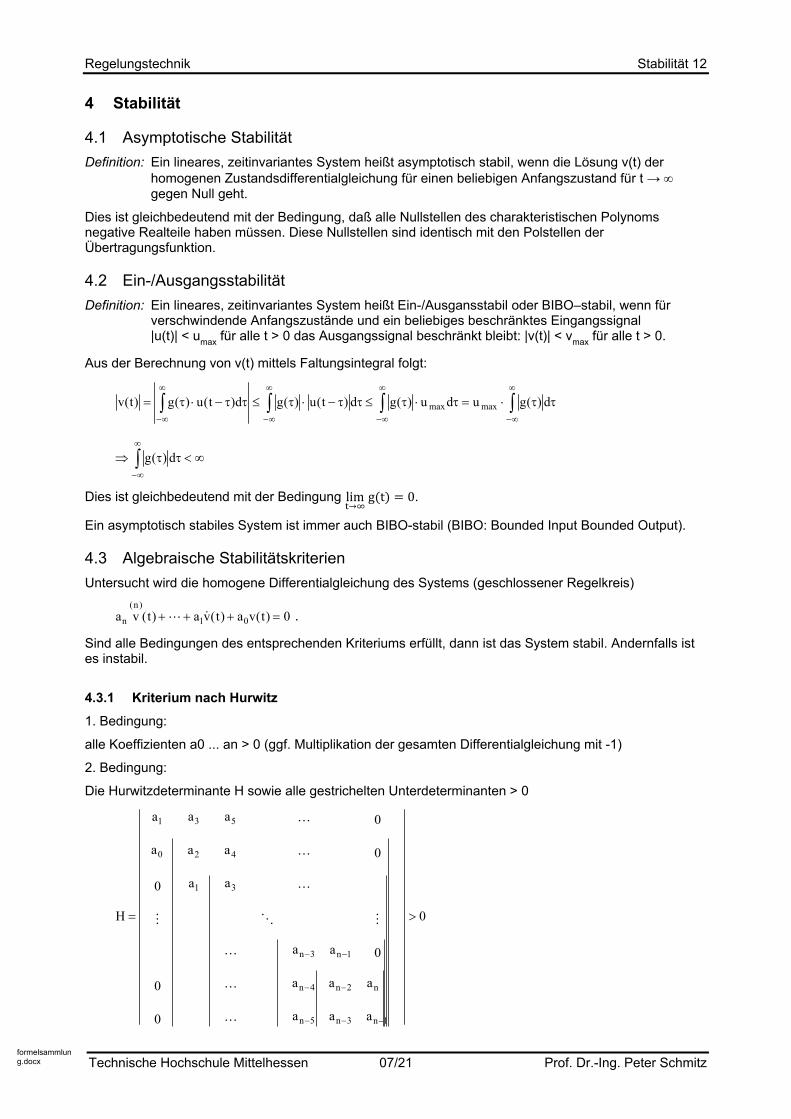
4.3.1 Kriterium nach Hurwitz
1. Bedingung:
alle Koeffizienten a0 ... an > 0 (ggf. Multiplikation der gesamten Differentialgleichung mit -1)
2. Bedingung:
Die Hurwitzdeterminante H sowie alle gestrichelten Unterdeterminanten > 0
3 51
0 2 4
31
n 3 n 1
n 4 n 2 n
n 5 n 3 n 1
a aa 0
a a a 0
aa0
H 0
a a 0
a a a0
a a a0
Regelungstechnik Stabilität 13
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
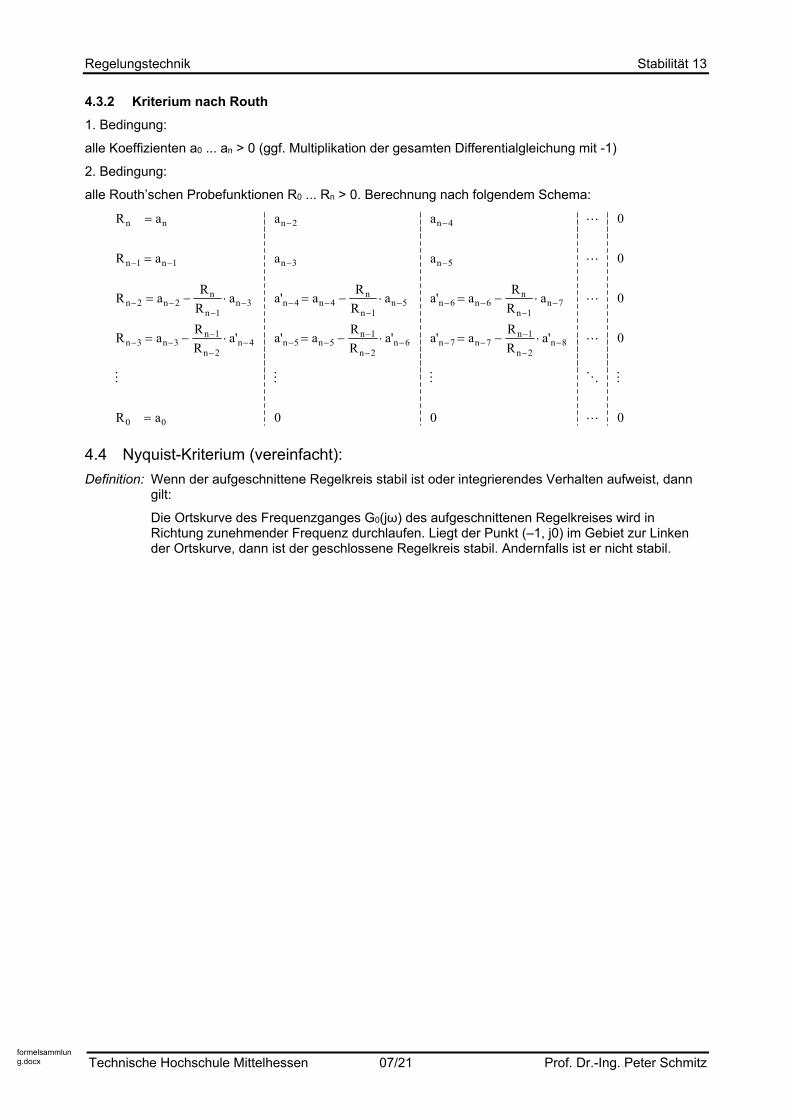
4.3.2 Kriterium nach Routh
1. Bedingung:
alle Koeffizienten a0 ... an > 0 (ggf. Multiplikation der gesamten Differentialgleichung mit -1)
2. Bedingung:
alle Routh’schen Probefunktionen R0 ... Rn > 0. Berechnung nach folgendem Schema:
R a a a
R a a a
R aR
Ra a a
R
Ra a a
R
Ra
R aR
Ra a a
R
Ra a
n n n n
n n n n
n nn
nn n n
n
nn n n
n
nn
n nn
nn n n
n
nn n
2 4
1 1 3 5
2 21
3 4 41
5 6 61
7
3 31
24 5 5
1
26
0
0
0
' '
' ' ' '
7 71
28
0 0
0
0 0 0
aR
Ra
R a
nn
nn'
4.4 Nyquist-Kriterium (vereinfacht):
Definition: Wenn der aufgeschnittene Regelkreis stabil ist oder integrierendes Verhalten aufweist, dann gilt:
Die Ortskurve des Frequenzganges G0(jω) des aufgeschnittenen Regelkreises wird in Richtung zunehmender Frequenz durchlaufen. Liegt der Punkt (–1, j0) im Gebiet zur Linken der Ortskurve, dann ist der geschlossene Regelkreis stabil. Andernfalls ist er nicht stabil.
Regelungstechnik Reglersynthese 14
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
5 Reglersynthese
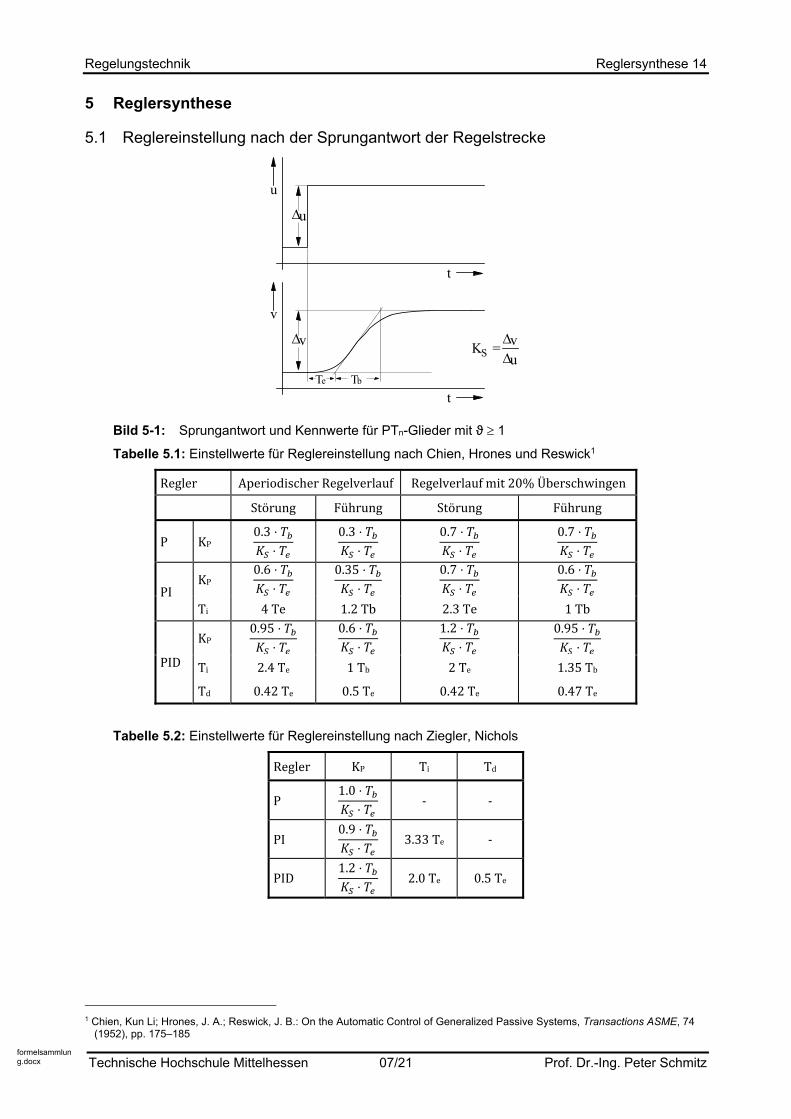
5.1 Reglereinstellung nach der Sprungantwort der Regelstrecke
Bild 5-1: Sprungantwort und Kennwerte für PTn-Glieder mit ϑ 1
Tabelle 5.1: Einstellwerte für Reglereinstellung nach Chien, Hrones und Reswick1
Regler Aperiodischer Regelverlauf Regelverlauf mit 20% Überschwingen
Störung Führung Störung Führung
P KP 0.3 ⋅ 𝑇𝐾 ⋅ 𝑇
0.3 ⋅ 𝑇𝐾 ⋅ 𝑇
0.7 ⋅ 𝑇𝐾 ⋅ 𝑇
0.7 ⋅ 𝑇𝐾 ⋅ 𝑇
PI KP
0.6 ⋅ 𝑇𝐾 ⋅ 𝑇
0.35 ⋅ 𝑇𝐾 ⋅ 𝑇
0.7 ⋅ 𝑇𝐾 ⋅ 𝑇
0.6 ⋅ 𝑇𝐾 ⋅ 𝑇
Ti 4 Te 1.2 Tb 2.3 Te 1 Tb
PID
KP 0.95 ⋅ 𝑇𝐾 ⋅ 𝑇
0.6 ⋅ 𝑇𝐾 ⋅ 𝑇
1.2 ⋅ 𝑇𝐾 ⋅ 𝑇
0.95 ⋅ 𝑇𝐾 ⋅ 𝑇
Ti 2.4 Te 1 Tb 2 Te 1.35 Tb
Td 0.42 Te 0.5 Te 0.42 Te 0.47 Te
Tabelle 5.2: Einstellwerte für Reglereinstellung nach Ziegler, Nichols
Regler KP Ti Td
P 1.0 ⋅ 𝑇𝐾 ⋅ 𝑇
- -
PI 0.9 ⋅ 𝑇𝐾 ⋅ 𝑇
3.33 Te -
PID 1.2 ⋅ 𝑇𝐾 ⋅ 𝑇
2.0 Te 0.5 Te
1 Chien, Kun Li; Hrones, J. A.; Reswick, J. B.: On the Automatic Control of Generalized Passive Systems, Transactions ASME, 74
(1952), pp. 175–185
t
v
t
u
u
vK =S
vu
Te Tb
Regelungstechnik Reglersynthese 15
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
5.2 Reglereinstellung nach Schwingversuch
Durchführung:
geschlossenen Regelkreis mit P-Regler herstellen
Regelkreis in einen stabilen Arbeitspunkt bringen
KP des Reglers langsam(!) vergrößern bis sich eine Dauerschwingung mit konstanter Amplitude
ausbildet. Dabei darf keine Größe Meß- oder Stellgrenzen erreichen.
Periodendauer Tkrit der Schwingung messen
eingestellte Reglerverstärkung KPkrit ablesen
Tabelle 5.3: Einstellwerte für Reglereinstellung nach Ziegler, Nichols2
Regler KP Ti Td
P 0.50 KPkrit - -
PI 0.45 KPkrit 0.83 Tkrit -
PD 0.55 KPkrit - 0.15 Tkrit
PID 0.60 KPkrit 0.50 Tkrit 0.12 Tkrit
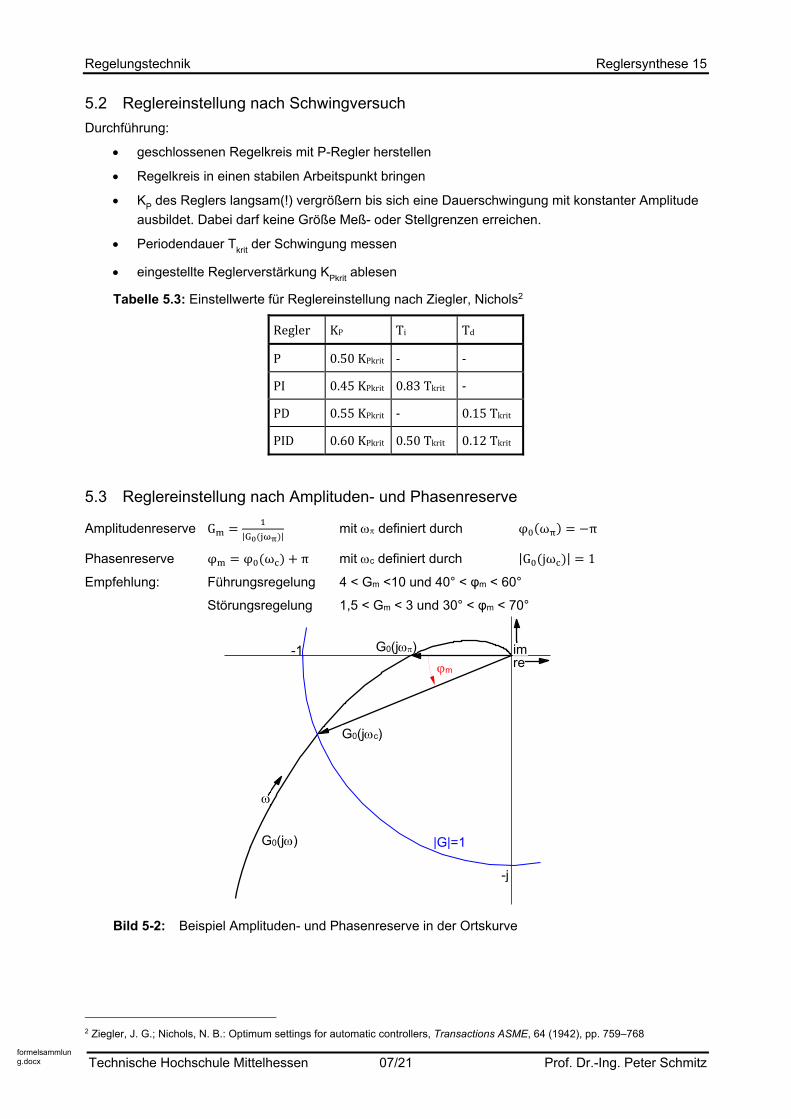
5.3 Reglereinstellung nach Amplituden- und Phasenreserve
Amplitudenreserve G| |
mit definiert durch φ ω π
Phasenreserve φ φ ω π mit c definiert durch |G jω | 1
Empfehlung: Führungsregelung 4 < Gm <10 und 40° < φm < 60°
Störungsregelung 1,5 < Gm < 3 und 30° < φm < 70°
Bild 5-2: Beispiel Amplituden- und Phasenreserve in der Ortskurve
2 Ziegler, J. G.; Nichols, N. B.: Optimum settings for automatic controllers, Transactions ASME, 64 (1942), pp. 759–768
-1
-j
m
G0(j) reim
|G|=1 G0(j)
G0(jc)
Regelungstechnik Reglersynthese 16
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
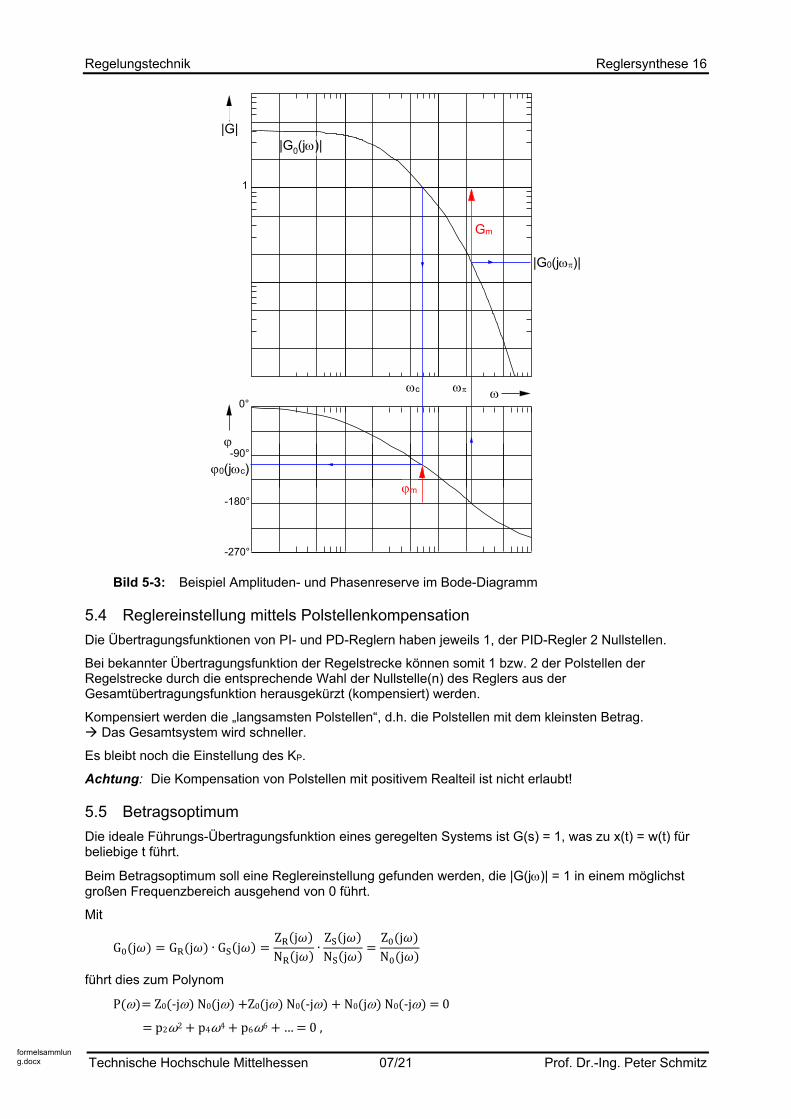
Bild 5-3: Beispiel Amplituden- und Phasenreserve im Bode-Diagramm
5.4 Reglereinstellung mittels Polstellenkompensation
Die Übertragungsfunktionen von PI- und PD-Reglern haben jeweils 1, der PID-Regler 2 Nullstellen.
Bei bekannter Übertragungsfunktion der Regelstrecke können somit 1 bzw. 2 der Polstellen der Regelstrecke durch die entsprechende Wahl der Nullstelle(n) des Reglers aus der Gesamtübertragungsfunktion herausgekürzt (kompensiert) werden.
Kompensiert werden die „langsamsten Polstellen“, d.h. die Polstellen mit dem kleinsten Betrag. Das Gesamtsystem wird schneller.
Es bleibt noch die Einstellung des KP.
Achtung: Die Kompensation von Polstellen mit positivem Realteil ist nicht erlaubt!
5.5 Betragsoptimum
Die ideale Führungs-Übertragungsfunktion eines geregelten Systems ist G(s) = 1, was zu x(t) = w(t) für beliebige t führt.
Beim Betragsoptimum soll eine Reglereinstellung gefunden werden, die |G(j)| = 1 in einem möglichst großen Frequenzbereich ausgehend von 0 führt.
Mit
G j𝜔 G j𝜔 ∙ G j𝜔Z j𝜔N j𝜔
∙Z j𝜔N j𝜔
Z j𝜔N j𝜔
führt dies zum Polynom
P Z0 -j N0 j Z0 j N0 -j N0 j N0 -j 0
p2ω2 p4ω4 p6ω6 … 0 ,
0°
-180°
-270°
1
|G|
c
|G0(j)|
0(jc) -90°
Gm
m
|G0(j)|
Regelungstechnik Reglersynthese 17
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
dessen Koeffizienten, beginnend mit p2, durch Wahl der Reglerparameter zu Null gemacht werden müssen.
5.6 Symmetrisches Optimum
Geeignet für Verzögerungsstrecken, deren Zeitkonstanten sich aufteilen lassen in je eine Gruppe von k großen und n kleinen Zeitkonstanten.
Beim Symmetrischen Optimum geht man davon aus, daß der Amplitudengang von G0 durch den Regler eine Durchtrittfrequenz c erhält, die zwischen den niedrigen Eckfrequenzen der großen Zeitkonstanten und den hohen Eckfrequenzen der kleinen Zeitkonstanten liegt, wodurch G0 eine gewisse (namensgebende) Symmetrie erhält.
Die n kleinen Zeitkonstanten lassen sich zu einer Summenzeitkonstanten TΣ zusammenfassen.
Verzögerungen verhalten sich für große Frequenzen im Verhältnis zur Eckfrequenz wie Integratoren. Daraus ergibt sich
G j𝜔K
1 T j𝜔 ⋅ ∏ T j𝜔⋅ G j𝜔 .
Im Weiteren folgt das Verfahren dem Betragsoptimum.
Regelungstechnik Vermaschte Regelkreise 18
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
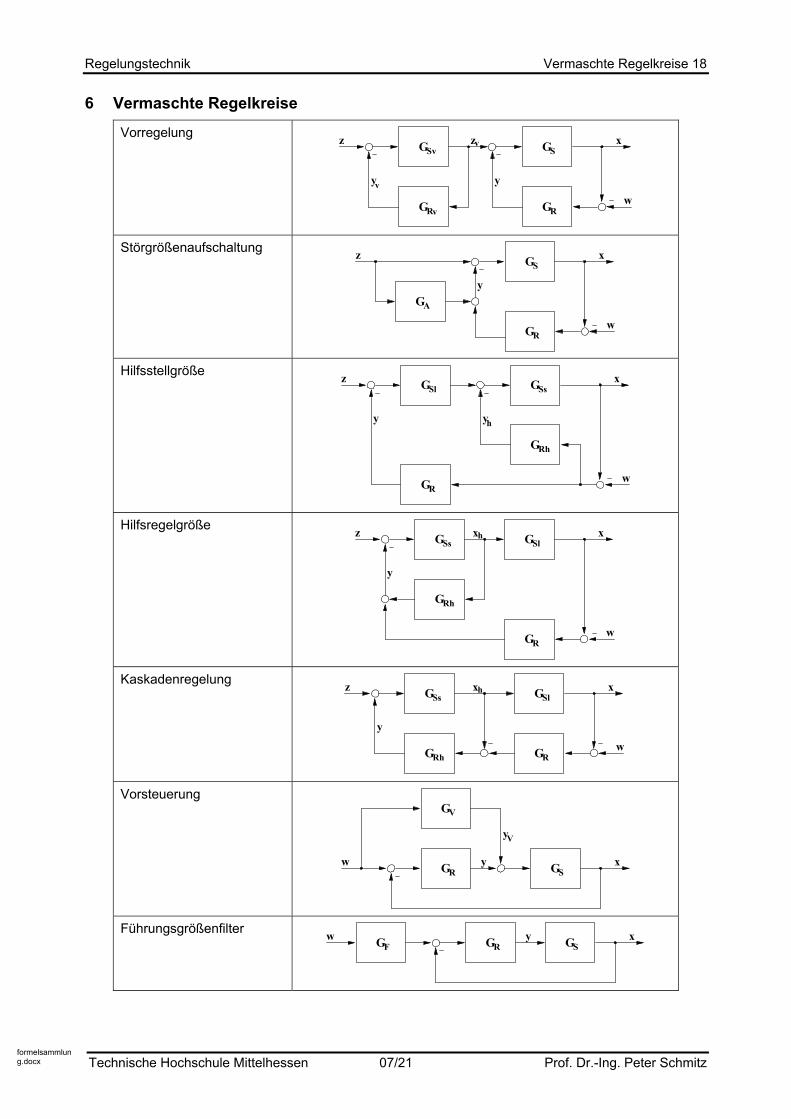
6 Vermaschte Regelkreise
Vorregelung
Störgrößenaufschaltung
Hilfsstellgröße
Hilfsregelgröße
Kaskadenregelung
Vorsteuerung
Führungsgrößenfilter
z
y
GR
GSv
v
v
xz
y
GR
GS
w
v
z
GA
x
y
GR
GS
w
z
y
GRh
GSl
h
x
y
GR
GSs
w
z
y
GRh
GSsx
GR
GSl
w
xh
z
y
GRh
GSsx
GR
GSl
w
xh
y
G
V
xy
G
R GSw
V
G xyG R GSw
F
Regelungstechnik Anhang 19
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
Anhang
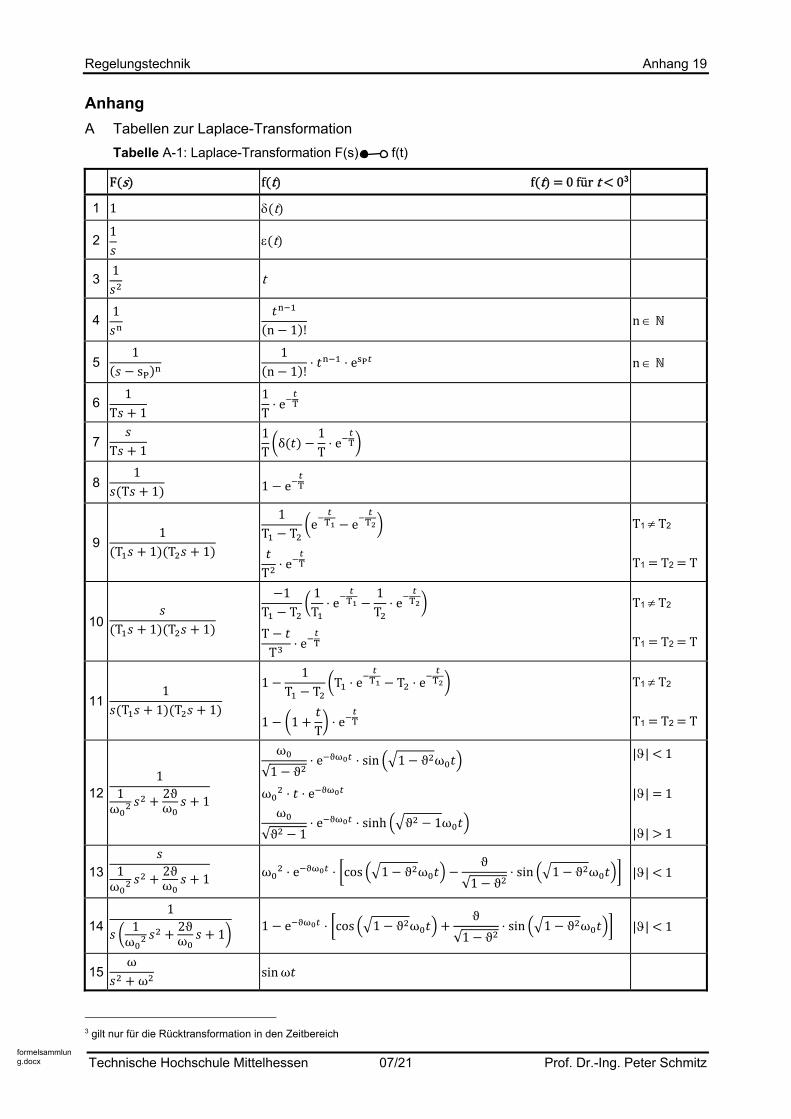
A Tabellen zur Laplace-Transformation
Tabelle A-1: Laplace-Transformation F(s) f(t)
F s f t f t 0 für t 03
1 1 t
2 1𝑠
t
3 1𝑠
t
4 1𝑠
𝑡
n 1 ! n ℕ
5 1
𝑠 s
1n 1 !
⋅ 𝑡 ⋅ e n ℕ
6 1
T𝑠 1
1T⋅ e
7 𝑠
T𝑠 1
1T
δ 𝑡1T⋅ e
8 1
𝑠 T𝑠 1 1 e
9 1
T 𝑠 1 T 𝑠 1
1T T
e e
𝑡T
⋅ e
T1 T2
T1 T2 T
10 𝑠
T 𝑠 1 T 𝑠 1
1T T
1T⋅ e
1T⋅ e
T 𝑡T
⋅ e
T1 T2
T1 T2 T
11 1
𝑠 T 𝑠 1 T 𝑠 1
11
T TT ⋅ e T ⋅ e
1 1𝑡T
⋅ e
T1 T2
T1 T2 T
12 1
1ω 𝑠
2ϑω 𝑠 1
ω
√1 ϑ⋅ e ⋅ sin 1 ϑ ω 𝑡
ω ⋅ 𝑡 ⋅ e ω
√ϑ 1⋅ e ⋅ sinh ϑ 1ω 𝑡
|| 1
|| 1
|| 1
13 𝑠
1ω 𝑠
2ϑω 𝑠 1
ω ⋅ e ⋅ cos 1 ϑ ω 𝑡
ϑ
√1 ϑ⋅ sin 1 ϑ ω 𝑡 || 1
14 1
𝑠1ω 𝑠
2ϑω 𝑠 1
1 e ⋅ cos 1 ϑ ω 𝑡ϑ
√1 ϑ⋅ sin 1 ϑ ω 𝑡 || 1
15 ω
𝑠 ω sinω𝑡
3 gilt nur für die Rücktransformation in den Zeitbereich
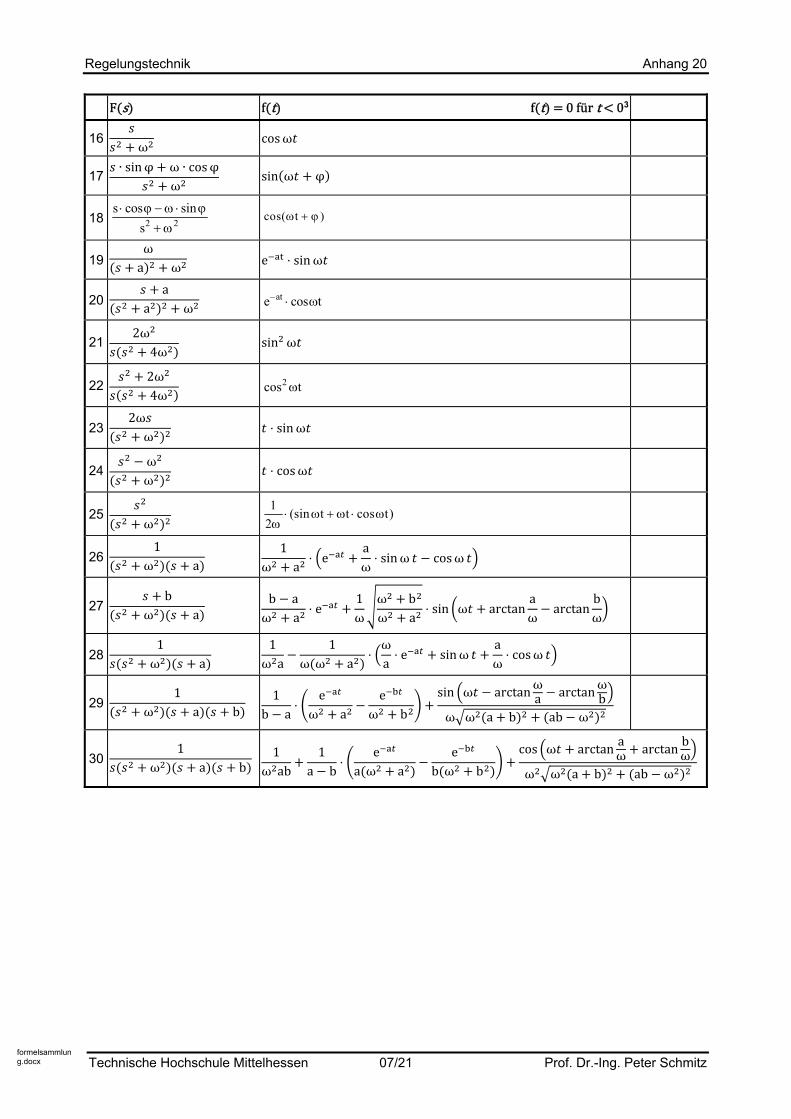
Regelungstechnik Anhang 20
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
F s f t f t 0 für t 03
16 𝑠
𝑠 ω cosω𝑡
17 𝑠 ∙ sinφ ω ∙ cosφ
𝑠 ω sin ω𝑡 φ
18 s
s
cos sin 2 2
cos( ) t
19 ω
𝑠 a ω e ⋅ sinω𝑡
20 𝑠 a
𝑠 a ω e tat cos
21 2ω
𝑠 𝑠 4ω sin ω𝑡
22 𝑠 2ω
𝑠 𝑠 4ω cos2t
23 2ω𝑠
𝑠 ω 𝑡 ⋅ sinω𝑡
24 𝑠 ω𝑠 ω
𝑡 ⋅ cosω𝑡
25 𝑠
𝑠 ω
1
2 (sin cos )t t t
26 1
𝑠 ω 𝑠 a
1ω a
⋅ eaω⋅ sinω𝑡 cosω𝑡
27 𝑠 b
𝑠 ω 𝑠 a b a
ω a⋅ e
1ω
ω bω a
⋅ sin ω𝑡 arctanaω
arctanbω
28 1
𝑠 𝑠 ω 𝑠 a
1ω a
1ω ω a
⋅ωa⋅ e sinω𝑡
aω⋅ cosω𝑡
29 1
𝑠 ω 𝑠 a 𝑠 b
1b a
⋅e
ω ae
ω b
sin ω𝑡 arctanωa arctan
ωb
ω ω a b ab ω
30 1
𝑠 𝑠 ω 𝑠 a 𝑠 b 1ω ab
1a b
⋅e
a ω ae
b ω b
cos ω𝑡 arctanaω arctan
bω
ω ω a b ab ω
Regelungstechnik Anhang 21
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
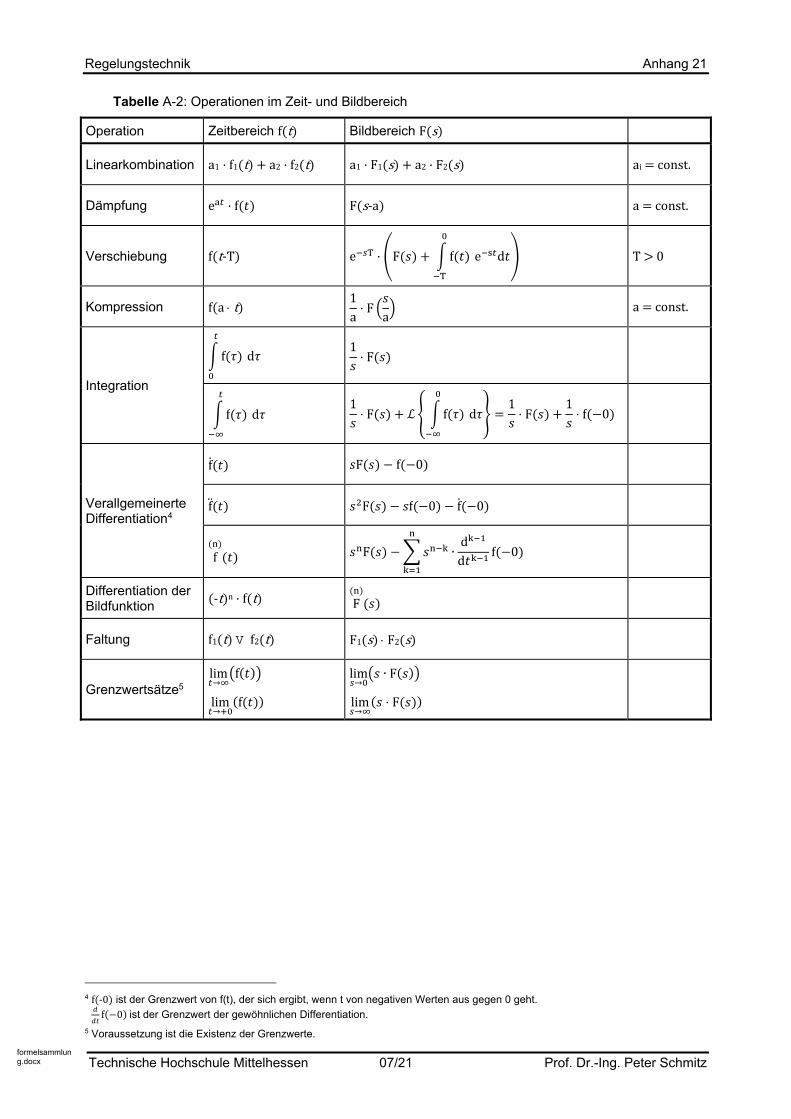
Tabelle A-2: Operationen im Zeit- und Bildbereich
Operation Zeitbereich f t Bildbereich F s
Linearkombination a1 f1 t a2 f2 t a1 F1 s a2 F2 s ai const.
Dämpfung e f 𝑡 F s-a a const.
Verschiebung f t-T e F 𝑠 f 𝑡 e d𝑡 T 0
Kompression f a t 1a⋅ F
𝑠a
a const.
Integration
f 𝜏 d𝜏 1𝑠⋅ F 𝑠
f 𝜏 d𝜏 1𝑠⋅ F 𝑠 ℒ f 𝜏 d𝜏
1𝑠⋅ F 𝑠
1𝑠⋅ f 0
Verallgemeinerte Differentiation4
f 𝑡 𝑠F 𝑠 f 0
f 𝑡 𝑠 F 𝑠 𝑠f 0 f 0
f 𝑡 𝑠 F 𝑠 𝑠 ∙d
d𝑡f 0
Differentiation der Bildfunktion
-t n f t F 𝑠
Faltung f1 t � f2 t F1 s F2 s
Grenzwertsätze5 lim→
f 𝑡
lim→
f 𝑡
lim→
𝑠 ∙ F 𝑠
lim→
𝑠 ⋅ F 𝑠
4 f -0 ist der Grenzwert von f(t), der sich ergibt, wenn t von negativen Werten aus gegen 0 geht.
f 0 ist der Grenzwert der gewöhnlichen Differentiation.
5 Voraussetzung ist die Existenz der Grenzwerte.
Regelungstechnik Anhang 22
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
B Bode-Diagramm
|G|
90°
0°
-90°
-180°
-270°
-360°
Regelungstechnik Anhang 23
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
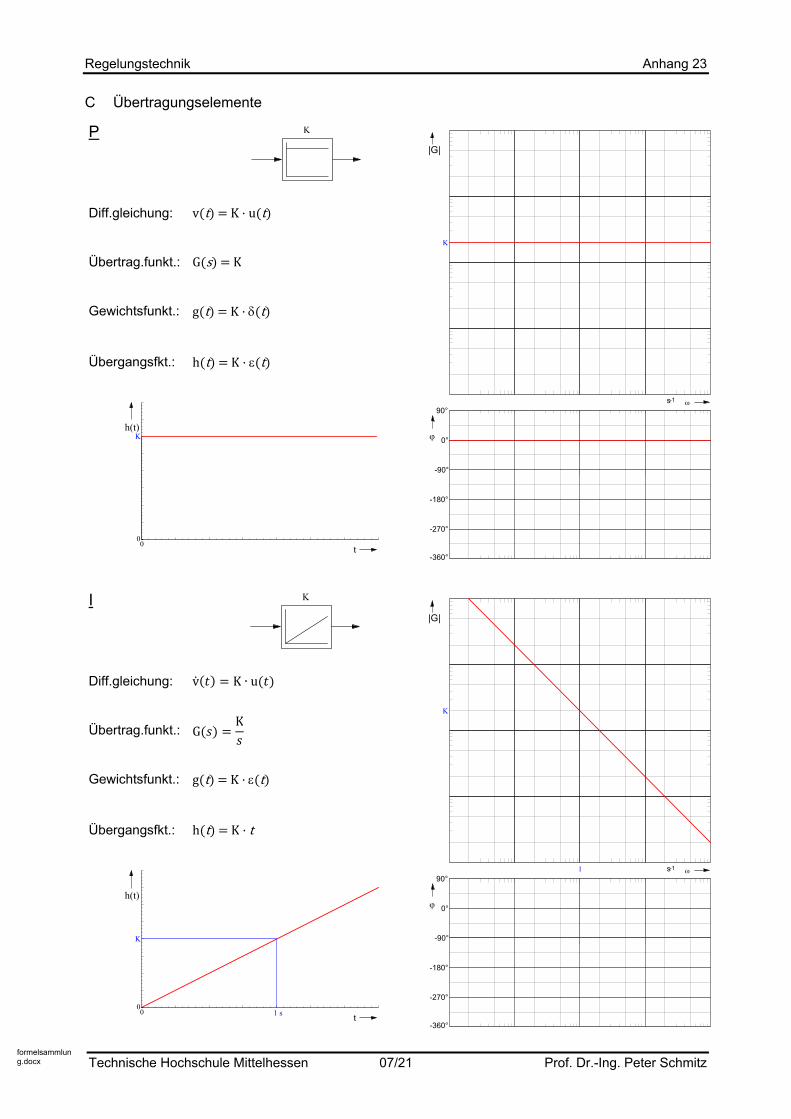
C Übertragungselemente
P
Diff.gleichung: v t K u t
Übertrag.funkt.: G s K
Gewichtsfunkt.: g t K t
Übergangsfkt.: h t K t
I
Diff.gleichung: v 𝑡 K ∙ u 𝑡
Übertrag.funkt.: G 𝑠K𝑠
Gewichtsfunkt.: g t K t
Übergangsfkt.: h t K t
s-1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
t
h(t)
00
K
K
s1 -1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
t
h(t)
00
K
1 s
K
Regelungstechnik Anhang 24
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
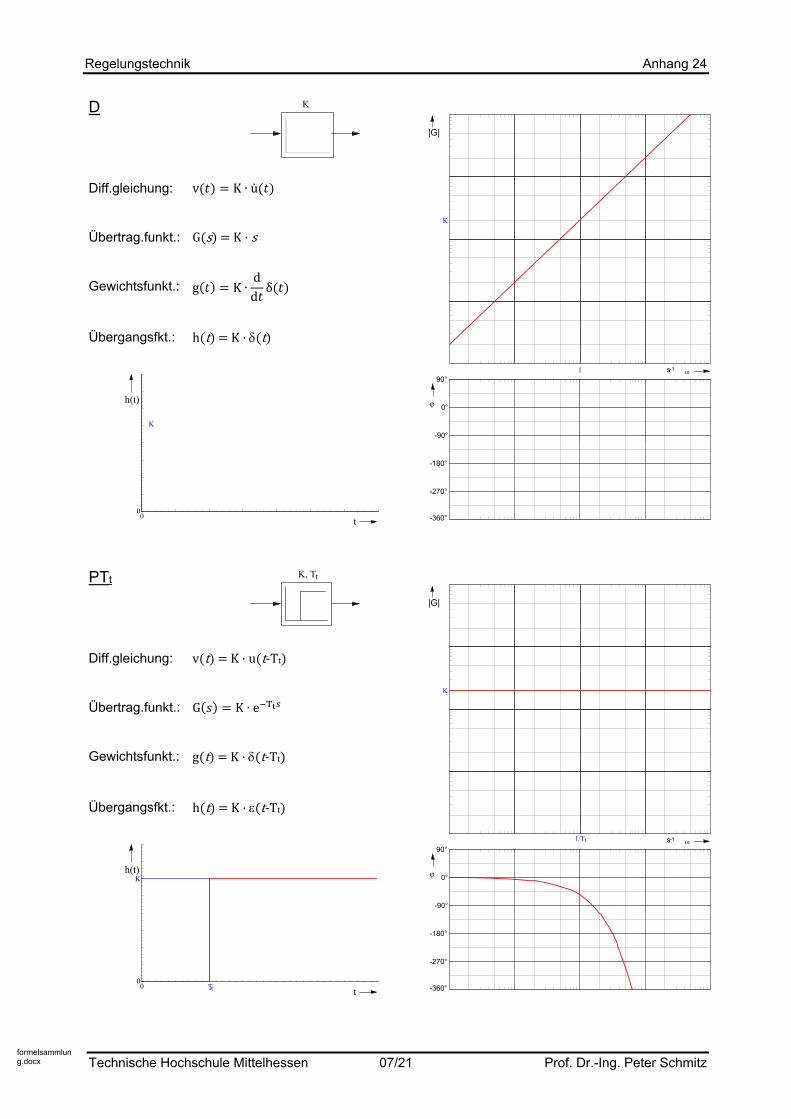
D
Diff.gleichung: v 𝑡 K ∙ u 𝑡
Übertrag.funkt.: G s K s
Gewichtsfunkt.: g 𝑡 K ∙dd𝑡δ 𝑡
Übergangsfkt.: h t K t
PTt
Diff.gleichung: v t K u t-Tt
Übertrag.funkt.: G 𝑠 K ∙ e
Gewichtsfunkt.: g t K t-Tt
Übergangsfkt.: h t K t-Tt
K
s1 -1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
t
h(t)
00
K
K, Tt
s-1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
1/Tt
t
h(t)
00 T
K
t
Regelungstechnik Anhang 25
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
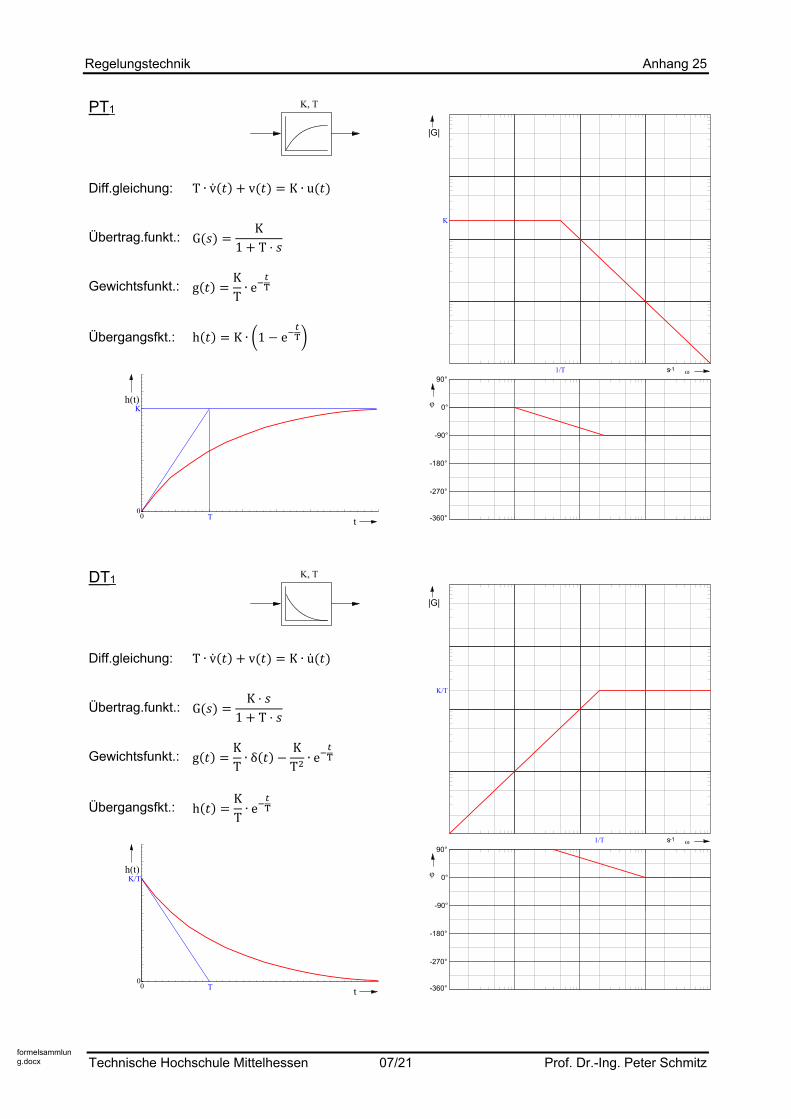
PT1
Diff.gleichung: T ∙ v 𝑡 v 𝑡 K ∙ u 𝑡
Übertrag.funkt.: G 𝑠K
1 T ⋅ 𝑠
Gewichtsfunkt.: g 𝑡KT∙ e
Übergangsfkt.: h 𝑡 K ∙ 1 e
DT1
Diff.gleichung: T ∙ v 𝑡 v 𝑡 K ∙ u 𝑡
Übertrag.funkt.: G 𝑠K ⋅ 𝑠
1 T ⋅ 𝑠
Gewichtsfunkt.: g 𝑡KT∙ δ 𝑡
KT
∙ e
Übergangsfkt.: h 𝑡KT∙ e
K, T
s1/T -1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
t
h(t)
00 T
K
K, T
s1/T -1
K/T
-360°
90°
0°
-90°
-180°
-270°
|G|
t
h(t)
00 T
K/T
Regelungstechnik Anhang 26
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
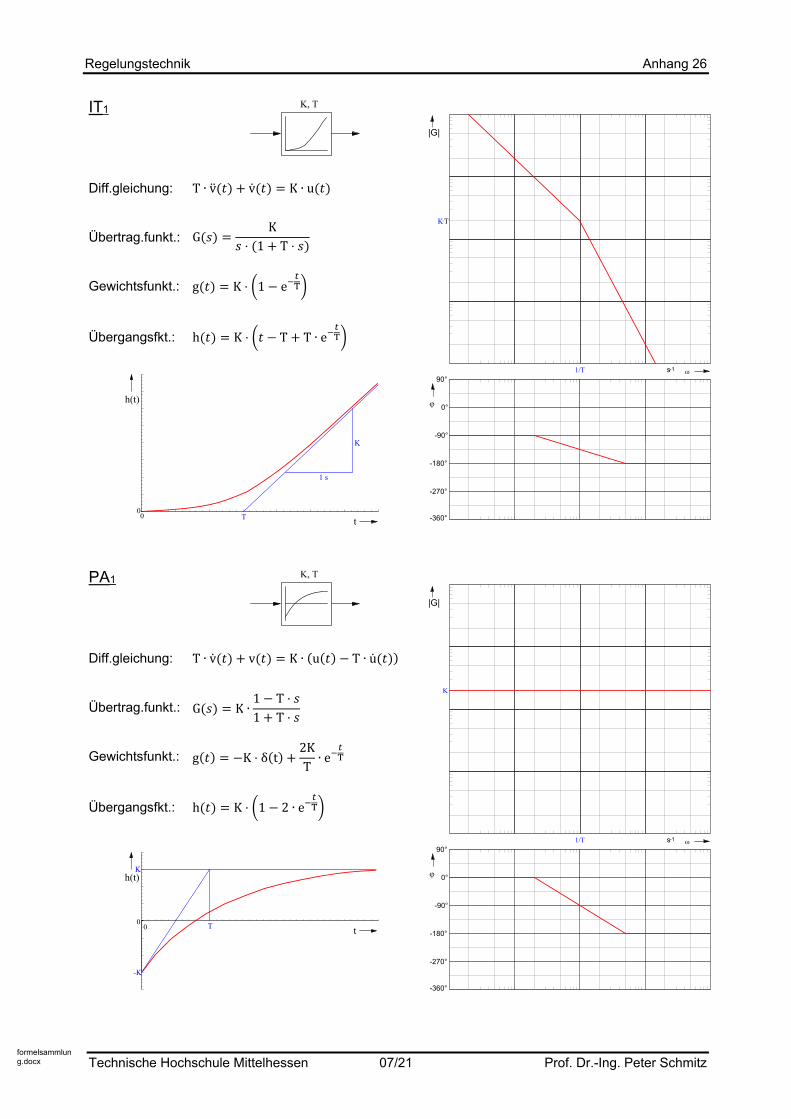
IT1
Diff.gleichung: T ∙ v 𝑡 v 𝑡 K ∙ u 𝑡
Übertrag.funkt.: G 𝑠K
𝑠 ⋅ 1 T ⋅ 𝑠
Gewichtsfunkt.: g 𝑡 K ⋅ 1 e
Übergangsfkt.: h 𝑡 K ⋅ 𝑡 T T ∙ e
PA1
Diff.gleichung: T ∙ v 𝑡 v 𝑡 K ∙ u 𝑡 T ∙ u 𝑡
Übertrag.funkt.: G 𝑠 K ∙1 T ⋅ 𝑠1 T ⋅ 𝑠
Gewichtsfunkt.: g 𝑡 K ⋅ δ t2KT∙ e
Übergangsfkt.: h 𝑡 K ⋅ 1 2 ∙ e
K, T
s1/T -1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
t
h(t)
00 T
K
1 s
K, T
s1/T -1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
t
h(t)
00 T
K
-K
Regelungstechnik Anhang 27
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
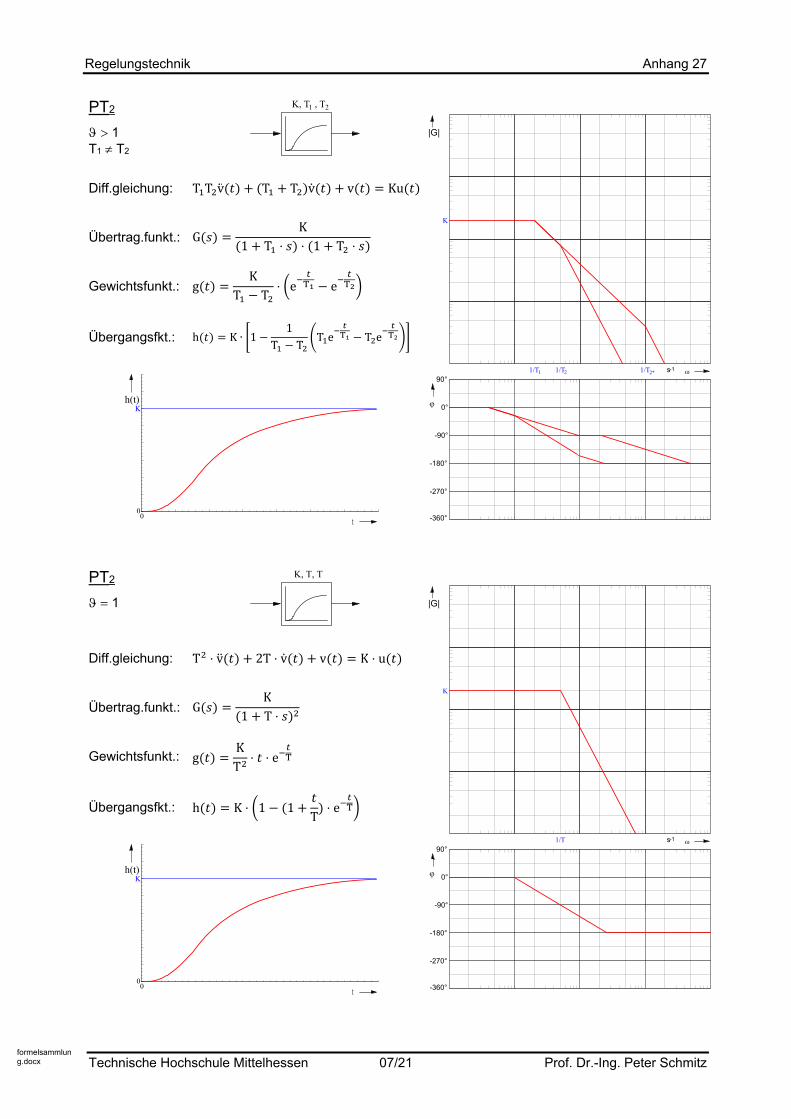
PT2
1 T1 T2
Diff.gleichung: T T v 𝑡 T T v 𝑡 v 𝑡 Ku 𝑡
Übertrag.funkt.: G 𝑠K
1 T ⋅ 𝑠 ⋅ 1 T ⋅ 𝑠
Gewichtsfunkt.: g 𝑡K
T T⋅ e e
Übergangsfkt.: h 𝑡 K ∙ 11
T TT e T e
PT2
1
Diff.gleichung: T ⋅ v 𝑡 2T ⋅ v 𝑡 v 𝑡 K ⋅ u 𝑡
Übertrag.funkt.: G 𝑠K
1 T ⋅ 𝑠
Gewichtsfunkt.: g 𝑡K
T⋅ 𝑡 ⋅ e
Übergangsfkt.: h 𝑡 K ⋅ 1 1𝑡T⋅ e
K, T , T1 2
s1/T -1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
1/T 1/T1 2 2*
t
h(t)
00
K
K, T, T
s1/T -1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
t
h(t)
00
K
Regelungstechnik Anhang 28
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
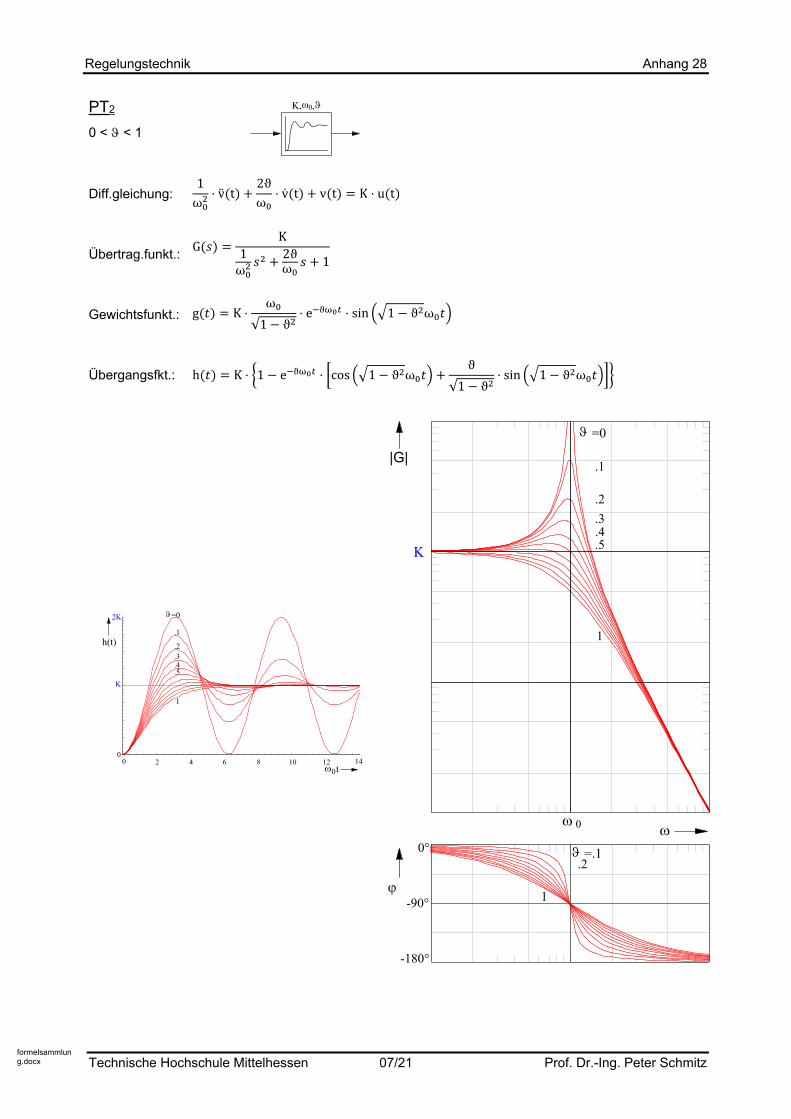
PT2
0 < < 1
Diff.gleichung: 1ω
⋅ v t2ϑω
⋅ v t v t K ⋅ u t
Übertrag.funkt.: G 𝑠
K1ω
𝑠2ϑω 𝑠 1
Gewichtsfunkt.: g 𝑡 K ⋅ω
√1 ϑ⋅ e ⋅ sin 1 ϑ ω 𝑡
Übergangsfkt.: h 𝑡 K ⋅ 1 e ⋅ cos 1 ϑ ω 𝑡ϑ
√1 ϑ⋅ sin 1 ϑ ω 𝑡
K, 0
h(t)
2 4 6 8 10 120
0 t14
K
2K
0
=0
.1
.2
.3
.4
1
.5
=0
1
=.1
1
.3
.5
.2
.1
0°
-90°
-180°
.4
.2
K
|G|
0
Regelungstechnik Anhang 29
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
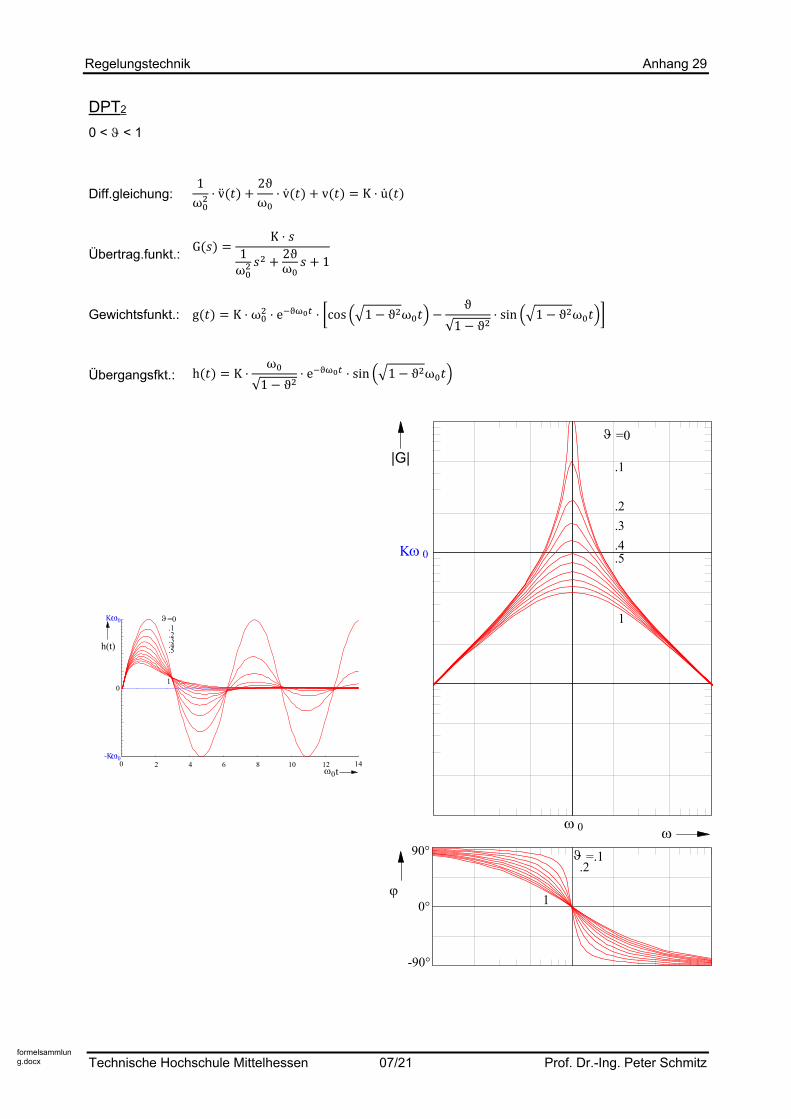
DPT2
0 < < 1
Diff.gleichung: 1ω
⋅ v 𝑡2ϑω
⋅ v 𝑡 v 𝑡 K ⋅ u 𝑡
Übertrag.funkt.: G 𝑠
K ⋅ 𝑠1ω
𝑠2ϑω 𝑠 1
Gewichtsfunkt.: g 𝑡 K ⋅ ω ⋅ e ⋅ cos 1 ϑ ω 𝑡ϑ
√1 ϑ⋅ sin 1 ϑ ω 𝑡
Übergangsfkt.: h 𝑡 K ⋅ω
√1 ϑ⋅ e ⋅ sin 1 ϑ ω 𝑡
h(t)
2 4 6 8 10 12
0
140
0 t
=0.1.2.3.4
1
.5
-K 0
K 0
0
=0
1
=.1
1
.3
.5
.2
.1
90°
0°
-90°
.4
.2
K
|G|
0
Regelungstechnik Anhang 30
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
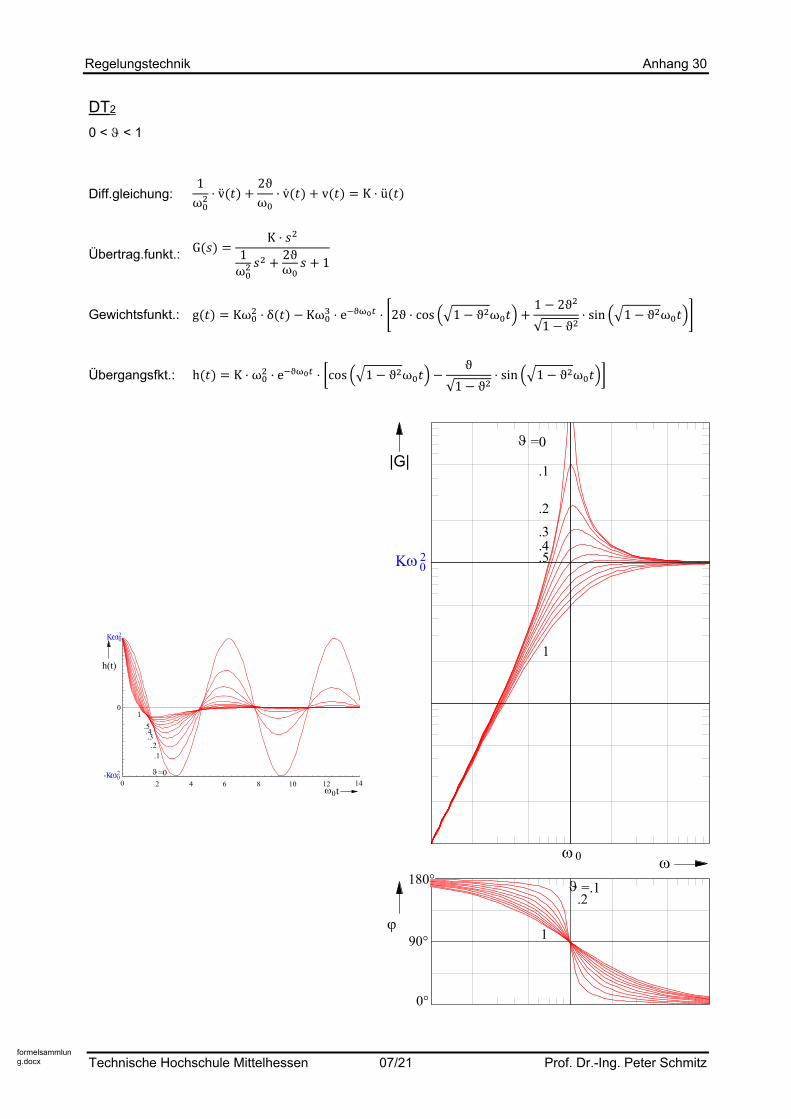
DT2
0 < < 1
Diff.gleichung: 1ω
⋅ v 𝑡2ϑω
⋅ v 𝑡 v 𝑡 K ⋅ u 𝑡
Übertrag.funkt.: G 𝑠K ⋅ 𝑠
1ω
𝑠2ϑω 𝑠 1
Gewichtsfunkt.: g 𝑡 Kω ⋅ δ 𝑡 Kω ⋅ e ⋅ 2ϑ ⋅ cos 1 ϑ ω 𝑡1 2ϑ
√1 ϑ⋅ sin 1 ϑ ω 𝑡
Übergangsfkt.: h 𝑡 K ⋅ ω ⋅ e ⋅ cos 1 ϑ ω 𝑡ϑ
√1 ϑ⋅ sin 1 ϑ ω 𝑡
h(t)
2 4 6 8 10 12
0
1400 t
=0
.1.2
.3.4
1
.5
-K 0 2
K 0 2
0
=0
1
=.1
1
.3
.5
.2
.1
180°
90°
0°
.4
.2
K
|G|
02
Regelungstechnik Anhang 31
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
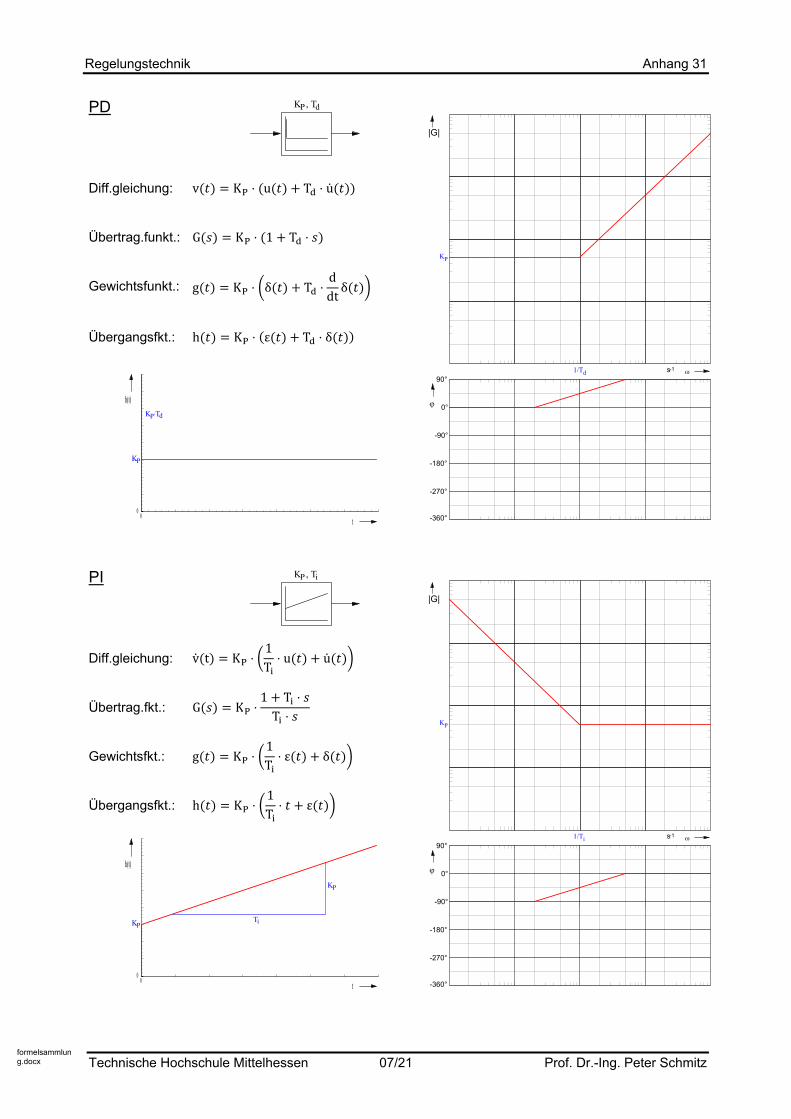
PD
Diff.gleichung: v 𝑡 K ⋅ u 𝑡 T ⋅ u 𝑡
Übertrag.funkt.: G 𝑠 K ⋅ 1 T ⋅ 𝑠
Gewichtsfunkt.: g 𝑡 K ⋅ δ 𝑡 T ⋅ddtδ 𝑡
Übergangsfkt.: h 𝑡 K ⋅ ε 𝑡 T ⋅ δ 𝑡
PI
Diff.gleichung: v t K ⋅1T⋅ u 𝑡 u 𝑡
Übertrag.fkt.: G 𝑠 K ⋅1 T ⋅ 𝑠
T ⋅ 𝑠
Gewichtsfkt.: g 𝑡 K ⋅1T⋅ ε 𝑡 δ 𝑡
Übergangsfkt.: h 𝑡 K ⋅1T⋅ 𝑡 ε 𝑡
K , TP d
s1/T -1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
P
d
t
h(t)
00
Td.
KP
KP
K , TP i
s1/T -1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
P
i
t
h(t)
00
KP
KP
Ti
Regelungstechnik Anhang 32
Technische Hochschule Mittelhessen 07/21 Prof. Dr.-Ing. Peter Schmitz formelsammlung.docx
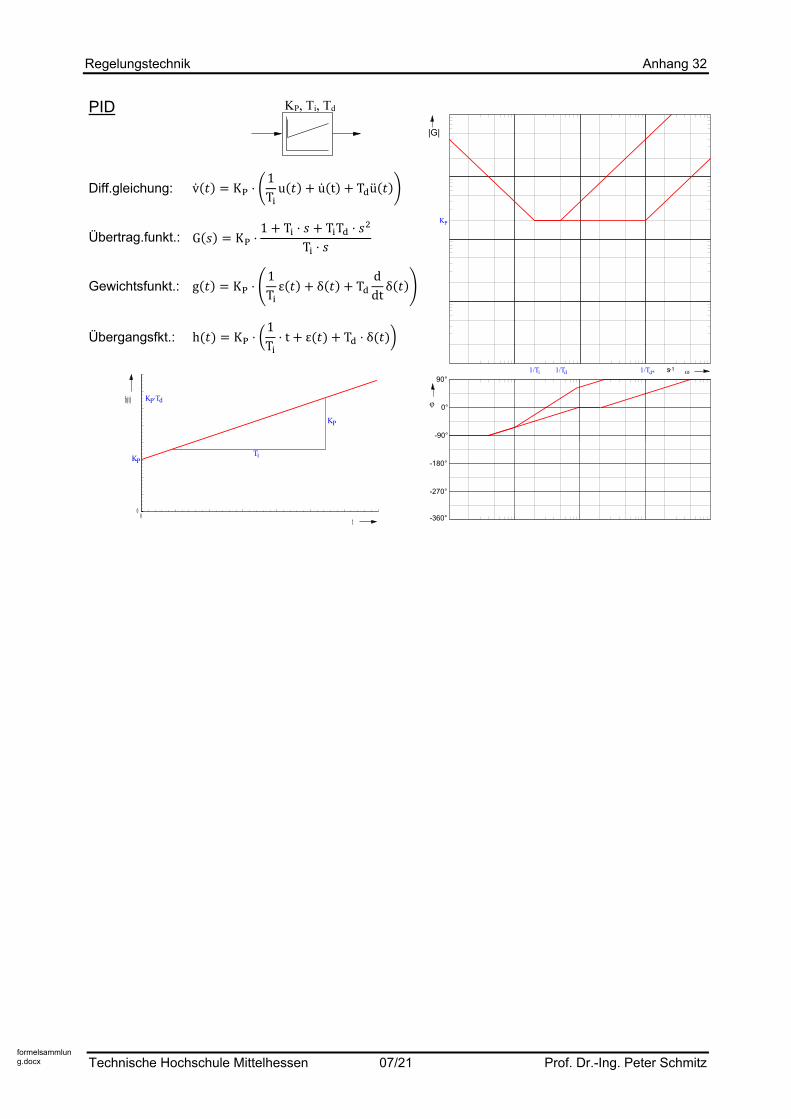
PID
Diff.gleichung: v 𝑡 K ⋅1T
u 𝑡 u t T u 𝑡
Übertrag.funkt.: G 𝑠 K ⋅1 T ⋅ 𝑠 T T ⋅ 𝑠
T ⋅ 𝑠
Gewichtsfunkt.: g 𝑡 K ⋅1Tε 𝑡 δ 𝑡 T
ddtδ 𝑡
Übergangsfkt.: h 𝑡 K ⋅1T⋅ t ε 𝑡 T ⋅ δ 𝑡
s1/T -1
K
-360°
90°
0°
-90°
-180°
-270°
|G|
1/T 1/Ti d d*
P
t
h(t)
00
Td.
KP
KP
KP
Ti
KP, Ti, Td