Embed Size (px)
Citation preview
In Due Time
Kyle Baitz, Jonathan Pierson, Travis Haley
Background
• Pulling weeds is time consuming and expensive.
• An autonomous weed puller would save money and time becomes a non-issue.
• Eliminates the use of herbicides

Problem Statement
Design and fabricate an autonomous weed puller that can successfully navigate a corn field. The weed puller must remove weeds to within 2 inches of the corn stalk. The spacing of the corn stalks is 4.5”on center with rows being 30” apart
Solution Statement
A mechanism similar to a rotor tiller will be used along side a line tracking system to simultaneously navigate and pull weeds.
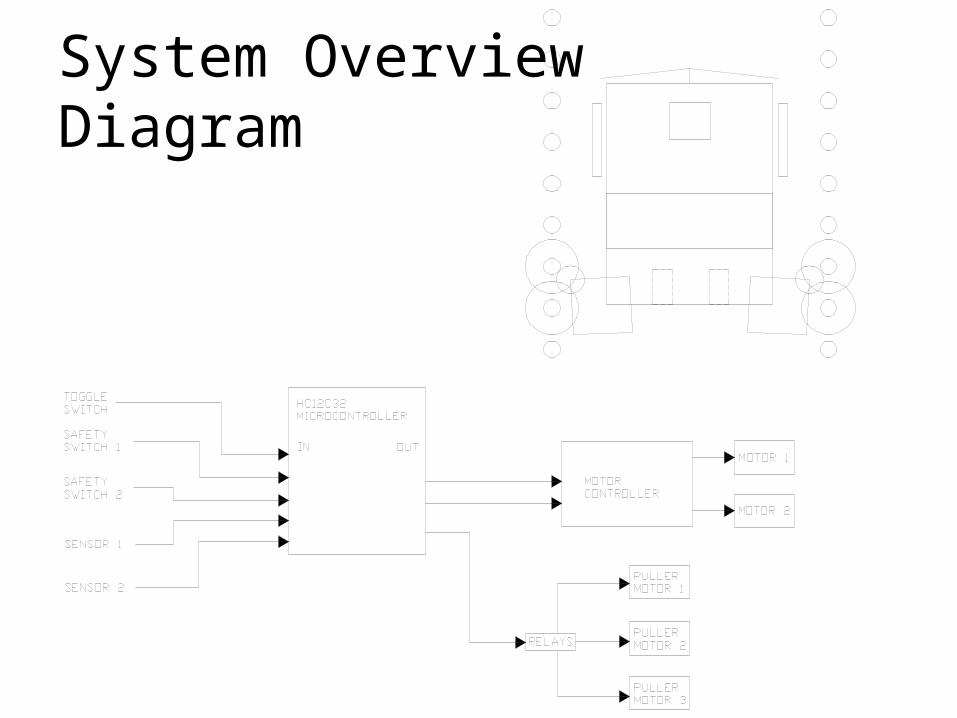
System Overview Diagram
Rolling Sensor Mount
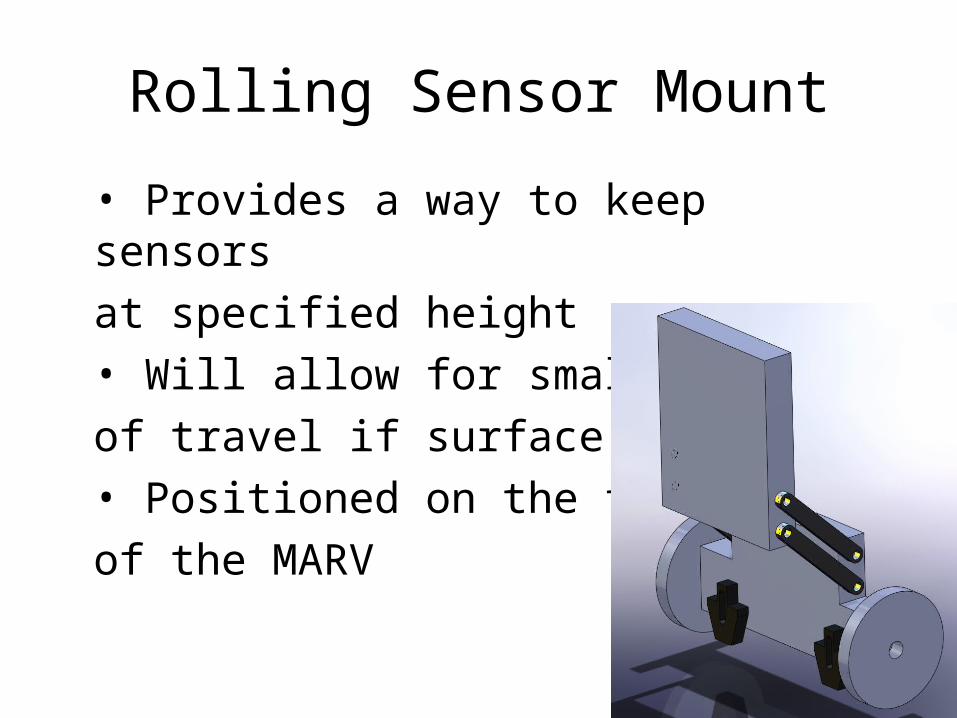
• Provides a way to keep sensorsat specified height• Will allow for small amountof travel if surface is uneven.• Positioned on the frontof the MARV
Rolling Sensor Mount
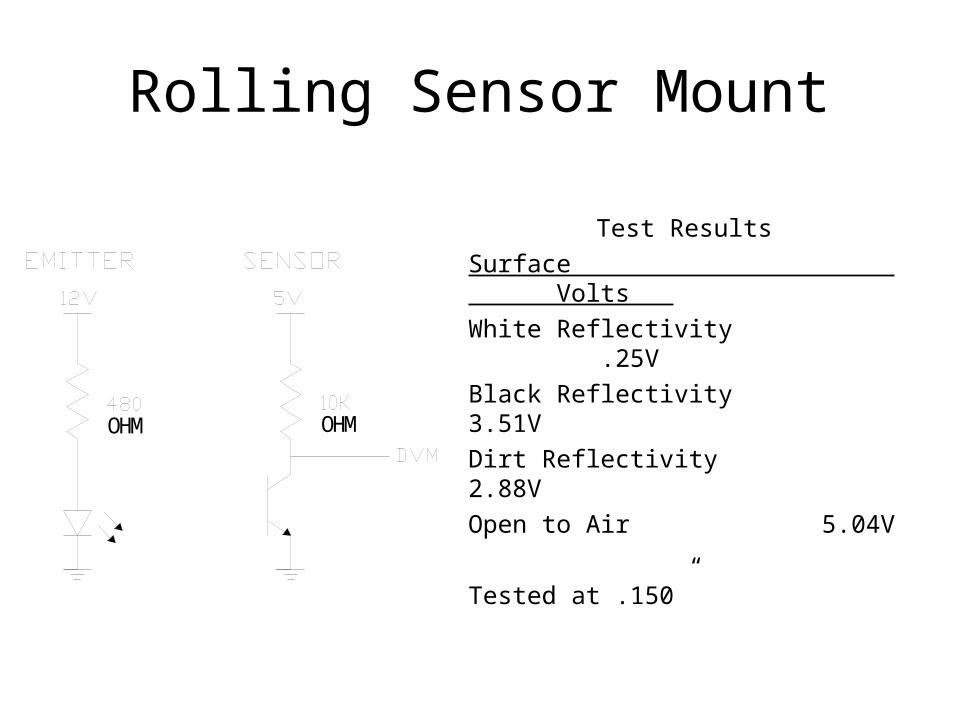
Test ResultsSurface Volts White Reflectivity .25VBlack Reflectivity 3.51VDirt Reflectivity 2.88VOpen to Air 5.04V
Tested at .150”
OHM OHM
Rolling Sensor Mount
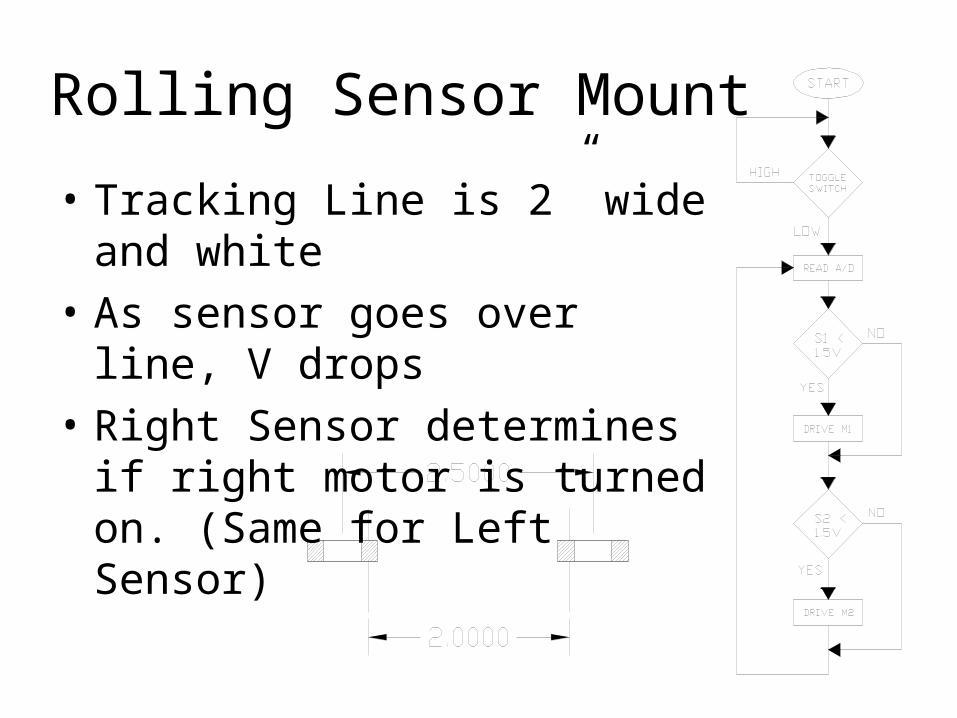
• Tracking Line is 2” wide and white• As sensor goes over line, V drops• Right Sensor determines if right
motor is turned on. (Same for Left Sensor)

Weed Puller/Tiller
In action

Weed Puller/Tiller

Arm Mechanism

Arm Mechanism
Safety Bumper
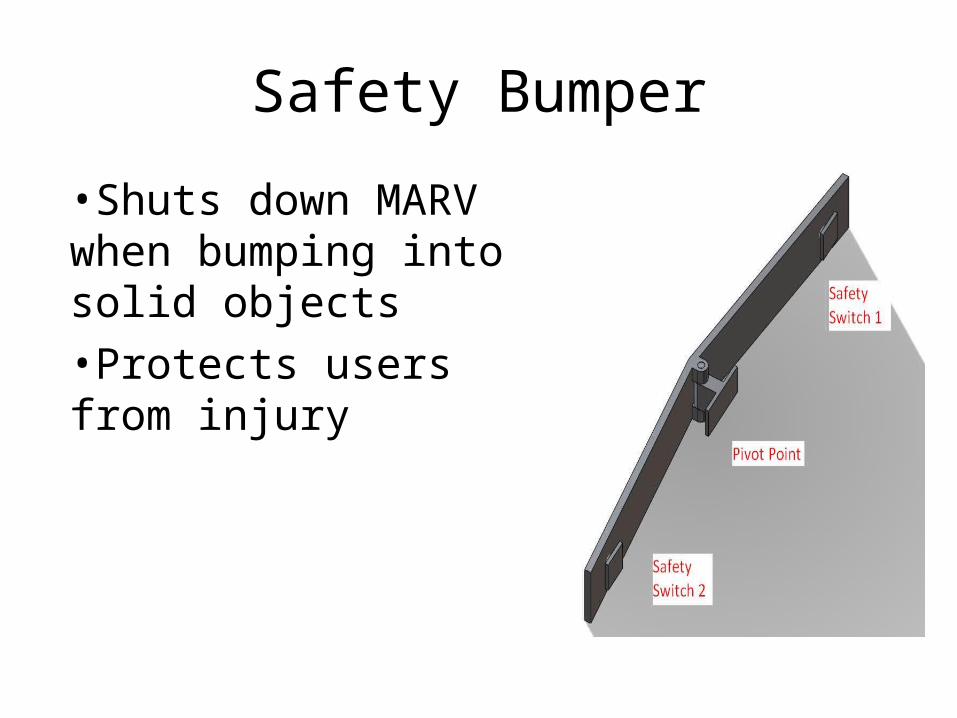
•Shuts down MARV when bumping into solid objects•Protects users from injury

Safety BumperOperation Diagram

Personnel Assignments
Rolling Sensor Assembly, Flow Diagram, System Diagram- Kyle Baitz
Arm Assembly, Roller Assembly, Spring System Design- Travis Haley
Safety Bumper, Budget, Model Assembly, Sensor Testing-Jonathan Pierson

Budget
• MARV assembly (borrowed)• Tiller Arm assembly• Tiller Arm motors (borrowed)• Tracking sensors (borrowed)• Miscellaneous materials
(borrowed)
$0$50$0$0$0_________$50 Total

Schedule
Week 1 Week 2 Week 3 Week 4 Week 5 Week 6 Week 7Brainstorming
Research Sensors
Weed Pulling Patents Background Mechanisms
Design Mechanical Safety Bumper
Rolling Sensor Mount Tiller-esque Mechanism
Arm Mechanism Tillers' Drive System
Design Electrical Sensor Circuit
Motor Functionality Programming
Flowcharts Code Analysis Presentation
Questions?





























