Embed Size (px)
DESCRIPTION
Curso elementos finitos por CIDETER
Citation preview

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 1/60
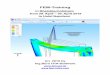
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Introduccion al Metodo de los elementos
finitos: analisis modal y dinamica lineal
Dr. Ing. Cavalieri Federico
CIMECCONICET-Universidad Nacional del Litoral
Centro Tecnologico CIDETER

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 2/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Introduccion. Problemas de la dinamica
estructural
En este modulo se tratara el analisis de la respuesta dinamica deestructuras y componentes mecanicos.
Se entiende por “analisis de respuesta estructural” al
proceso por el cual se trata de determinar como se comporta una
estructura frente a un estado de solicitacion
En el analisis se parte del conocimiento de la estructura (geometrıa,
dimensiones, propiedades materiales) y su estado de vinculacion y
carga.
La respuesta hace referencia a parametros que precisan el estado
mecanico de la misma: desplazamientos, deformaciones, tensiones,
aceleraciones, etc.
La caracterıstica principal de las solicitaciones dinamicas sobre lasestructuras es su variacion con el tiempo. Sin embargo estacaracterıstica no es suficiente para que deba ser realizado unanalisis dinamico.

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 3/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Si las cargas varıan suavemente con el tiempo, la respuesta de la
estructura puede ser calculada mediante una sucesion de analisis
estaticos para cada instante de la respuesta. Un analisis de estascaracterısticas suele denominarse pseudo-estatico.
Si la variacion con el tiempo de la estructura pone en evidencia las
fuerzas de inercia entonces se requiere de un analisis dinamico.
Cuando las cargas aplicadas a una estructura dependen del tiempo, es
necesario conocer las frecuencias naturales de la estructura y lavariacion con el tiempo de las respuesta de la estructura a esas
cargas.
Si la estructura es excitada con una frecuencia menor que un tercio dela frecuencia natural de vibracion mas baja, entonces los efectos de
inercia pueden ser despreciados y la soluci´on sigue con loslineamientos que se han tratado hasta el momento, considerando al
sistema cuasi-estatico.
Si la frecuencia de excitacion es elevada o la estructura vibra
libremente, la inercia ha de ser tenida en cuenta.

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 4/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Los problemas dinamicos
Problemas de propagacion de ondas. La carga es a menudo un
impacto o explosion. Poseen altas frecuencias. El tiempo de duracion
es corto.
Problemas estructurales dinamicos. La frecuencia de excitacion esdel mismo orden que la frecuencia natural de vibracion mas baja.
Estocasticos. En los problemas tipo 1 y 2 se conoce como varıa la
carga en funcion del tiempo, es decir son problemas determinısticos. En
los estocasticos no se sabe exactamente como varıa la carga.
Terremotos
En este trabajo solo se hara referencia al segundo tipo.

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 5/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Formas de cargas dinamicas
Una primera clasificacion que puede hacerse de las cargas
dinamicas es:Cargas determinısticas. Pueden describirse unıvocamente con una
funcion del tiempo.
Cargas aleatorias. No pueden definirse de manera precisa, pero
pueden definirse en un sentido estadıstico. Ejemplo acciones sısmicas.
En este curso se estudiara la respuesta de sistemas dinamicosfrente a cargas determinısticas.
Si se considera la forma de variacion con el tiempo, las cargasdinamicas pueden clasificarse como:
Cargas armonicas. Tienen variacion sinusoidal con el tiempo.Ejemplo: vibraciones de motores o maquinas.
Cargas periodicas. Tienen un patron que se repite con el tiempo.
Ejemplo: fuerza de propulsion de una helice de un barco.
Cargas impulsivas. La energıa se transmite en forma de pulso.
Ejemplo: impacto de vehıculos, explosiones, etc.

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 6/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Tipos de analisis dinamicos
Analisis de vibraciones libres. Tiene por objeto el calculo defrecuencias y modos (formas) naturales de vibracion, y pueden ser:
No amortiguada
Amortiguada
Analisis de la respuesta determinıstica. Tiene por objetodeterminar la respuesta de la estructura frente a un estado deexcitacion. A su vez pueden ser:
Respuesta armonica. Tiene por objeto determinar la amplitud y fase
de la respuesta armonica (estacionaria).
Respuesta transitoria. Tiene por objeto determinar la respuesta acada instante de tiempo. En este caso el analisis puede realizarse:
Por superposicion modal. (Se tratara en este modulo).Por integracion directa. (paso de tiempo).

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 7/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Metodos de solucion
Problema real de
la Ingeniería
IDEALIZACIONES+ HIPOTESIS
PROBLEMA MATEMATICO I- Formulado en Ecuaciones Diferenciales
METODO
NUMERICO
PROBLEMA MATEMATICO II- Formulado en Ecuaciones Algebraicas
SOLUCION ANALITICA EXACTA
-
-
Difícil de obtener Sólo disponible para casos muy particulares
SOLUCION NUMERICA DE APROX.
-
-
Simple de obtener para un ordenador Disponible para casos muy generales

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 8/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Sistemas de un grado de libertad.
La primera fase para el estudio de la dinamica de estructuras es laformulacion del problema matematico. Para ello se hace uso dealgunos principios:
Principio de D’Alembert.
Principio de los trabajos virtuales.
Principio de Hamilton.
Principio de D’AlembertLa ecuacion basica de la dinamica es la segunda ley de Newton
f = m a
donde f representa la resultante de fuerzas actuando sobre un punto
material, m la masa y a la aceleracion.f −m a = 0
El segundo termino es interpretado en el principio deD’Alembert como una fuerza de inercia que se opone a la fuerza f
actuante. La ultima ecuacion puede interpretarse como una ecuacionde equilibrio. El problema puede pensarse como uno de equilibrio.
INTRODUCCION Si d d d lib d Si i El ´ d d l l fi i

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 9/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Cuando una estructura esta sometida a una carga estatica, apareceuna fuerza de restitucion elastica definida como:
f r = k u
u(t)
P(t)
C
k
u(t)
P(t)f d
f r
f i
Cuando una estructura esta sometida a una carga dinamica, elcampo de desplazamiento u(t) varıa con el tiempo t y aparecen dostipos de fuerzas:
Fuerzas de inercia. Son debidas a las aceleraciones de os diferentes
puntos de la estructura.
Fuerzas de amortiguamiento. Surgen como consecuencia del
rozamiento interno de la estructura al deformarse, del rozamiento de los
vınculos, resistencia al aire, etc.
Todas estas fuerzas se oponen al movimiento.
INTRODUCCION Si t d d d lib t d Si t ti El ´ t d d l l t fi it

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 10/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Siendo m la masa del material de la estructura, las fuerzas de:
Inercia: md2u(t)dt2
= mu(t)
Amortiguamiento: mdu(t)dt
= u(t). Las fuerzas de amortiguamiento son
difıciles de evaluar y en general estan relacionadas con la velocidad en
forma no lineal.
Sin embargo para un gran numero de aplicaciones se puede inferirque las fuerzas viscosas varıan linealmente con la velocidad, yentonces, las fuerzas de amortiguamiento por unidad de volumenpueden expresarse como:
c du(t)
dt = c u(t)
siendo c un coeficiente de amortiguamiento
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 11/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Ecuaciones de equilibrio y principio de
D’Alembert
Considerese un instante del movimiento del oscilador que haexperimentado un desplazamiento u(t) a partir de su posicion inicial.
u(t)
P(t)
C
k
u(t)
P(t)f d
f r
f i
El equilibrio se escribe como:
p(t) + f r + f d + f i = 0
O bien reemplazando por:
f r = −k u(t) f d = −c u(t) f i = −m u(t)
La ecuacion de equilibrio puede escribirse como:
m u(t) + c u(t) + k u(t) = p(t)
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 12/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Analisis de vibracion libre
El comportamiento de oscilador esta gobernado por:
m u(t) + c u(t) + k u(t) = p(t)
Para que el problema este univocamente planteado, debeespecificarse adecuadas condiciones iniciales,
m u(t) + c u(t) + k u(t) = p(t)u(0) = u0
u(0) = u0
El problema homogeneo corresponde para el caso de p(t) = 0, es decir,
en asuencia de cargas exteriores.
El analisis de este caso no corresponde estrictamente al de hallar la
respuesta del sistema a una excitacion, sino al de caracterizarlo
dinamicamente.
Esto ultimo significa hallar la frecuencia natural.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 13/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Vibracion libre no amortiguada
m u(t) + k u(t) = 0u(0) = u0
u(0) = u0
La solucion de esta ecuacion diferencial puede escribirse como:
u(t) = u0
m
k sen
k
m t
+ u0 cos
k
m t
Esta solucion representa un movimiento armonico simple. Aquı
w =
k
m
representa una caracterıstica del sistema. En casos reales hayinfinitas frecuencias naturales
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 14/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Vibracion libre no amortiguada
5 10 15 20t
6
4
2
2
4
6
t
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 15/60
g
Vibracion libre amortiguada
u(t) +
c
m u(t) +
k
m u(t) = 0 u(0) = u0 con
u(0) = u0
La solucion propuesta esta dada por: u(t) = est. Reemplazando,s2 + s
c
m +
k
m
est = 0
Resolviendo la ecuacion cuadratica,
s1,2 = −c
2 m ±
c2
4 m2 − k
m
La solucion sera diferente segun sea el signo del radicando
Estas situaciones dependen del valor del coeficiente deamortiguamiento y se denominan amortiguamiento:
Crıtico,
Supracrıtico
Subcrıtico.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 16/60
Amortiguamiento Crıtico
El amortiguamiento crıtico se produce cuando el radicando se anula:
c2
4 m2 − k
m = 0
vale decir, cuando el coeficiente de amortiguamiento toma el valor
crıtico cc
cc = 2mω
En este caso, introduciendo las condiciones iniciales, la respuestaesta dada por
u(t) = [u0 + (u0 + ωu0 t) t] e−ω t
De la figura se infiere que para el amortiguamiento crıtico larespuesta no oscila sino que tiende a cero, en forma asintotica.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 17/60
Vibracion libre amortiguada.
Amortiguamiento crıtico
5 10 15 20t
6
4
2
2
4
6
t
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 18/60
Caso Sub-Amortiguado
Si el amortiguamiento es menor que el valor crıtico, es decircc < 2 m ω, el radicando es negativo. En estos casos suele
expresarse el amortiguamiento como una fraccion de su valor crıtico,
ξ = c
cc
= c
2mω
que se conoce como fraccion o relacion de amortiguamiento.
Introduciendo la variable ξ en
s1,2 = −c
2 m ±
c2
4 m2 − k
m
se tiene
s1,2 = −ξω ± i ω
1− ξ 2
y con notacion: ωD = ω
1− ξ 2. La respuesta es:
u(t) = e−ξ ω t u0 + u0ξω
ωD
sen(ωD t) + u0 cos(ωD t)
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 19/60
Vibracion libre amortiguada.
Sub-Amortiguado
5 10 15 20
6
4
2
2
4
6
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 20/60
Caso Sobre-Amortiguado
Si ξ > 1 el radicando es positivo, y puede escribirse como:
s = −ξω ± ω
ξ 2 − 1
y si se define ω = ω
ξ 2
− 1, la respuesta resulta
u(t) = e−ξ ω t [A senh(ω t) + B cosh(ω t)]
Puede observarse aquı, que al tener funciones hiperbolicas elmovimiento sobre-amortiguado no es oscilatorio sino que convergeasintoticamente a cero. Este caso, practicamente no se encuentranen estructuras.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 21/60
Vibracion libre amortiguada.
Sobre-Amortiguado
5 10 15 20t
6
4
2
2
4
6
t
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 22/60
Vibraciones libres para sistemas
amortiguados y no amortiguados
5 10 15 20t
6
4
2
2
4
6
t
Sobre Amortiguada
Sub Amoritguada
Amorti. crítico
No Amortiguada
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 23/60
Determinacion experimental de ξ
Si se consideran dos picos sucesivos de la curva de respuesta de la
estructura, y el hecho que las funciones armonicas se repiten conperıodo T , la relacion de amplitudes u(t) y u(t + T ) puede escribirsecomo
u(t)
u(t + T ) = e−ξω[t−(t+T )] = eξωT
Tomando el logaritmo natural de esa ecuacion se obtiene lo que seconoce como decremento logarıtmico
δ = ln u(t)
u(t + T ) = ξωT
Teniendo en cuenta que el perıodo para un caso subamoritguado esT = 2π/ωD, el decremento logarıtmico resulta
δ = 2πξ ω
ωD
= 2πξ
1− ξ 2
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 24/60
Respuesta forzada de sistemas de un grado
de libertad
La respuesta de sistemas de un grado de libertada pude provenir dei) fuerza de excitacion, ii) movimiento de su base: aceleraciones,velocidades o desplazamientos.
m u(t) + c u(t) + k u(t) = p(t)
u(0) = u0
u(0) = u0
La solucion de la ecuacion del movimiento resulta ser la suma de lasolucion general homogenea y de una solucion particular de la
ecuacion no homogenea:
u(t) = uh(t) + u p(t)
La solucion general homogenea corresponde al caso de vibracionlibre. La solucion particular se estudiara a continuacion.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 25/60
Caso no amortiguado
u(t) + k u(t) = p0 sen (ω t)
La solucion general de la homogenea es
uh(t) = A sen(ω t) + B cos(ω t)
y la solucion particular
u p(t) = C sen(ω t)
La solucion general sera:
uh(t) = A sen(ω t) + B cos(ω t) +
p0
k(1− β 2) sen (ωt)
donde β = ω/ω. Si el cuerpo parte del reposo u(0) = 0 y u(0) = 0
uh(t) = p0
k(1−
β 2) [ sen (ωt)− β sen(ωt)]
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 26/60
Vibracion Forzada no amortiguada
2 4 6 8 10t
6
4
2
2
4
6
t
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 27/60
Vibracion Forzada no amortiguada
m u(t) + c u(t) + k u(t) = p0 sen(ω t)
Teniendo en cuenta que:c
m = 2 ξ ω
por lo tanto,
u(t) + 2 ξ ω u(t) + ω2 u(t) = p0m
sen (ωt)
y la respuesta sera,
u(t) = e−ξωt [A sen(ωDt) + B cos(ωDt)] +
+ p0
k (1− β 2)2 + (2ξβ )2
(1− β 2) sen(ω t)− 2 ξ β cos(ω t)
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 28/60
Vibracion Forzada no amortiguada
20 40 60 80t
6
4
2
2
4
6
t
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 29/60
Resonancia
0.0 0.5 1.0 1.5 2.0 2.5 3.0
Β
1
2
3
4
5
6
FD 1
1 Β22
2 Ξ Β2
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 30/60
Resonancia
20 40 60 80 100t
60
40
20
20
40
60
t
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 31/60
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
O

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 32/60
Oscilaciones forzadas con cargas arbitrarias
u(t) + 2 ξ ω u(t) + ω2 u(t) = g(t) con g(t) = p(t)
m
Se considera aquı la respuesta de un sistema con amortiguamiento
viscoso, a una carga transitoria general.
Integral de Duhamel. Se basa en el principio de superposicion de
sistemas lineales.
u(t) = e−ξωt u0
w
sen(w t) + u0 cos(w t)+
+
∞
0
e−ξω(t−τ ) g(τ )
m ω sen [w (t− τ )]dτ
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Si i

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 33/60
Sistemas continuos
El caso mas simple que puede plantearse para una estructuracontinua es de una barra recta.
P A
L
x
Las variables que describen el estado mecanico de la barra son
Desplazamientos axiales: u(x, t)
Deformaciones axiales: ε(x, t)
Tensiones axiales: σ(x, t)
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
El valor de ε(x t) σ(x t) se relacionan por:

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 34/60
El valor de ε(x, t), σ(x, t) se relacionan por:
Relacion deformacion desplazamiento:
ε(x, t) = ∂u(x, t)
∂x
Relaciones constitutivas (Ley de Hooke):
σ(x, t) = Eε(x, t) = E ∂u(x, t)
∂x
Ecuaciones de movimiento:
∂σ(x, t)
∂x + X = ρ
∂ 2u(x, t)
∂t2
E ∂ 2u(x, t)∂x2
− ρ ∂ 2u(x, t)∂t2
= 0 Si (X = 0)
con la definicion c =
E/ρ, siendo c la velocidad de propagacion deondas longitudinales en barras.
c2∂ 2u(x, t)
∂x2 − ∂ 2u(x, t)
∂t2 = 0
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
C d b t d Vib i

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 35/60
Caso de una barra empotrada- Vibraciones
libres
El problema para una barra empotrada en un extremo, libre en el otroy en ausencia de fuerzas exteriores se escribe como:
c2∂ 2u(x, t)
∂x2 − ∂ 2u(x, t)
∂t2 = 0
con condiciones de contorno y iniciales
C.B
u(0, t) = 0
∂u∂x
(L, t) = u(L, t) = 0C.I
u(x, 0) = u0
∂u∂t
(x, 0) = u(x, 0) = 0
Una forma de resolver este problema es postulando separacion devariables:
u(x, t) = Φ(x)Y (t)
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Utili ando ( t) Φ( )Y (t)

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 36/60
Utilizando u(x, t) = Φ(x)Y (t)
La ecuacion del problema puede escribirse como:
c
2
Φ
(x)Y (t)− Φ(x)¨Y (t) = 0
Dividiendo por Φ(x)Y (t) se llega a
c2Φ(x)
Φ(x) − Y (t)
Y (t) = 0
El primer termino de esta expresion debe ser solamente una funcionde x mientras que el segundo debe ser funcion de t. La unicaposibilidad es que sean constantes, esto es:
c2Φ(x)
Φ(x) =
Y (t)
Y (t) = C
Lo que conduce a dos ecuaciones Y (t) + ω2Y (t) = 0
Φ(x) + b2Φ(x) = 0
donde ω2 = −C y b2 = −C/c2 = ω2/c2
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Soluciones

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 37/60
SolucionesEcuacion para los factores de participacion modal Y (t)
Y (t) + ω2
Y (t) = 0Ecuacion de vibracion libre un sistema de un grado de libertad. Susolucion es:
Y (t) = A1 sen (ωt) + A2 cos(ωt)
En forma analoga para los modos Φ(x):
Φ(x) + b2Φ(x) = 0
se obtiene la siguiente solucion:
Φ(x) = B1 sen (bx) + B2 cos(bx)
En un sistema continuo existen infinitos valores de b que verifican las
condiciones de contorno.
Esto hace que haya tambien infinitas formas modales de vibracion libre.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Soluciones para Φ( ) B s (b ) + B s(b )

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 38/60
Soluciones para Φ(x) = B1 sen (bx) + B2 cos(bx)
Primera condicion de contorno: u(0, t) = 0 ⇒ Φ(0) = 0
B1 sen (0) + B2 cos(0) = 0
entonces B2 = 0. Segunda condicion de contorno:u(L, t) = 0
⇒Φ(bx) = 0 para x = L
B1b cos(bL) = 0
cos(bL) = 0
cuya solucion distinta de la trivial es
bL = π2n− 1
2
con n = 1, 2, 3... designado el modo natural de vibracion.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
La forma modal para el modo n se escribe entonces:

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 39/60
La forma modal para el modo n se escribe entonces:
Φn(x) = B1 sen π2n− 1
2
x
Ly la frecuencia asociada a ese modo:
ωn = bc = 2n− 1
2 π
c
L
Los modos mas bajos son los que representan mas importancia parala respuesta estructural.
El primer modo, para n = 1, se denomina
“modo fundamental de vibracion”.
Para el caso de una barra con u = u0 y u(0) = 0, los factores departicipacion modal seran
Y n(t) = 8u0L
π2(2n−
1)2 ρ
E sin
E
ρ (2n− 1)
π
2Lt
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Ortogonalidad de los modos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 40/60
Ortogonalidad de los modos
0.2 0.4 0.6 0.8 1.0x
1.5
1.0
0.5
0.5
1.0
1.5
Φx
Φ3xSin5 Π x
2 L
Φ2xSin3 Π x
2 L
Φ1x SinΠ x
2 L
L
0
Φ1(x)Φ2(x)dx = 0 L
0
Φ2(x)Φ3(x)dx = 0 L
0
Φ1(x)Φ3(x)dx = 0
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Metodo de superposicion modal

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 41/60
Metodo de superposicion modalLos modos son ortogonales entre sı, de modo que pueden serutilizados como funciones base para describir el desplazamiento de
la estructura, esto es:
u(x, t) =∞
n=1
Φn(x)Y n(t)
Para el ejemplo de la barra, en la siguiente figura se muestra σ
0.02 0.04 0.06 0.08 0.10t
2.107
1.107
1.107
2.107Σx,t
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Discretizacion

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 42/60
DiscretizacionEl problema dinamico de la barra con deformacion axial, es
representativo del problema de cualquier estructura continua.
La solucion analıtica pudo obtenerse para este ejemplo sencillo, pero enun caso mas general ello no sera posible.
Se utilizara algun metodo de aproximacion que sustituye el problema
planteado con ecuaciones algebraicas en derivadas parciales por otro
con ecuaciones algebraicas involucrando matrices.
Se realizara una discretizacion temporal.
La discretizacion espacial sera llevada a cabo por el Metodo de losElementos Finitos.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Ecuacion matricial de equilibrio dinamico

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 43/60
Ecuacion matricial de equilibrio dinamico
Supongamos que una estructura se ha discretizado con elementos
finitos tridimensionales y que esta sometida a una carga exterior por
unidad de volumen variable en el tiempo: qe(t).
El campo de desplazamiento varıa con el tiempo u(t) y aparecen dos
nuevas fuerzas distribuidas en el volumen de la estructura:
Fuerza de inercia por unidad de volumen:
F ine(x, t) = −ρ∂ 2u(x, t)
∂t2 = ρu(x, t)
Fuerzas de amortiguamiento por unidad de volumen:
F amor(x, t) =−C ∂ u(x, t)
∂t= C u(x, t)
Donde ρ es la densidad y C es la constante de amortiguamiento.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Discretizacion por Elementos Finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 44/60
Discretizacion por Elementos FinitosEl campo de desplazamientos del elemento ue(t) puede aproximarsecomo:
ue(x, t) =
ni=1
N i(x)U i(t) = N (x)U e(t)
donde N (x) es la matriz de las funciones de forma que dependendel vector de coordenadas x y U (t) el vector de desplazamientosnodales dependientes del tiempo t.
Vector de fuerzas nodales equivalente a la carga distribuida:
F qe(t) =
V e
N T (x)qe(t) dV e
Vector de fuerzas nodales equivalente a la fuerza de inercia
F iner(t) = −
V e
N T (x)ρue(x, t) dV e = −
V e
ρN T (x)N (x) dV e U e(t)
F iner(t) = −M e U e(t)
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Discretizacion por Elementos Finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 45/60
Discretizacion por Elementos FinitosLa matriz
M e = V e
ρN T (x)N (x) dV e
se denomina matriz de masa del elemento.Vector de fuerzas nodales equivalente a la fuerza deamortiguamiento es
F amor(t) = − V eN T (x)C e ue(x, t) dV e = −
V eC eN T (x)N (x) dV e U e(t)
F amor(t) = −C e U e(t)
Aquı,
C e =
V e
C N T (x)N (x) dV e
se denomina, matriz de amortiguamiento del elemento.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Ecuacion de equilibrio

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 46/60
Ecuacion de equilibrioLa ecuacion matricial de equilibrio estatico del elementoK eU e(t) = F e, se transforma en:
K eU e(t) = F qe(t) + F iner(t) + F amor(t)
Luego, teniendo en cuenta:
F iner(t) = −M e U e(t)
F amor(t) = −C e U e(t)
La ecuacion matricial de equilibrio dinamico del elemento es
M e U e + C e U e(t) +K eU e(t) = F qe(t)
y la ecuacion matricial de toda la estructura
A
ne=1
M e U e(t) +C e U e(t) +K eU e(t)
= A
ne=1
[F qe(t)]
Ane=1, representa el ensamblaje o contribucion de todos los
elementos.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
A modo de resumen

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 47/60
A modo de resumen
M U (t) + C U (t) +KU (t) = F q(t)
donde,
C =
V
C N T (x)N (x) dV
M =
V ρN T (x)N (x) dV
K =
V
BT (x)DB(x) dV
F q(t) =
V
N T (x)q(t) dV
siendo B = ∂ N y D la matriz constitutiva que depende del modulode Young E y del coeficiente de poisson ν .
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Matriz de masa M

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 48/60
A la matriz de masa ası definida se la denomina matriz de masaconsistente para distinguirla de la matriz de masa concentrada, que
supone la masa de la estructura distribuida en forma discontinua
alrededor de los nodos. Para ello se concentra en cada nodo la masaque corresponde a la zona de influencia que se le considere.
La matriz de masa concentrada es del tipo diagonal, siendo mas facil de
almacenar y de invertir, simplificando la resolucion de la ecuacion
matricial de equilibrio.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Matriz de amortiguamiento

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 49/60
g
Los problemas de amortiguamiento en las estructuras son muy
complejos y dependen en gran medida de la energıa disipada en losvınculos de las estructuras y del nivel de esfuerzos. En general, loscoeficientes de amortiguamiento C dependen de la frecuencia ω delmovimiento de toda la estructura y, para ello, la matriz deamortiguamiento C no se puede construir ensamblando las matrices
de sus elementos. Para evitar este inconveniente, la matriz deamortiguamiento se suele expresar como una combinacion lineal delas matrices de rigidez y de masa. De esta forma, se origina la matriztipo Rayleigh:
C = αK + β M
en la que los coeficientes α, y β son dos coeficientes relacionadospor:
ξ = 1
2
αω +
β
ω
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Los coeficientes α y β se obtiene conociendo dos relaciones deamortiguamiento correspondientes a dos frecuencias de vibracion ω

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 50/60
amortiguamiento correspondientes a dos frecuencias de vibracion ωdiferentes. La utilizacion de la un amortiguamiento tipo Rayleigh tienela ventaja, segun se demostrara mas adelante, de desacoplar el
sistema de n ecuaciones del equilibrio dinamico transformandolo enn ecuaciones independientes.
0 2 4 6 8 10Ω
2
4
6
8
Ξ 1
2Α Ω
Β
Ω
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Modos y Frecuencias Naturales

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 51/60
yCuando no existen cargas aplicadas sobre la estructura y elamortiguamiento se supone despreciable, la ecuacion del equilibrio
dinamico se reduce a la ecuacion de vibracion natural de laestructura:
M U (t) + KU (t) = 0
Para estudiar la vibracion natural de una estructura suponemos queel vector de desplazamientos nodales, variable en el tiempo, puede
expresarse de la siguiente forma:
U (t) = Φ sen(ωt + φ)
donde Φ es el vector formado por las amplitudes de losdesplazamientos nodales y ω es la frecuencia de vibracion. Teniendo
en cuenta que:U (t) = −ω2Φ sen(ωt + φ)
al sustituir esta igualdad,
(K − λM )Φ = 0
siendo λ = ω2.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 52/60
Para que(K − λM )Φ = 0
tenga una solucion distinta de la trivial, Φ = 0 es necesario que severifique la ecuacion caracterıstica del problema de autovalores,
det (K − λM ) = 0
Si n es el orden de las matrices M y K , habra n escalares λi
llamados autovalores y que satisfacen la ecuacion caracterıstica.La solucion del problema de autovalores y autovectores consiste endeterminar frecuencias y modos naturales de la estructura.A cada autovalor λi y por lo tanto a cada frecuencia natural ωi =
√ λi
le corresponde un vector Φi llamado autovector, o modo natural .
Por consiguiente, la estructura tendra un numero de frecuenciasnaturales y modos naturales igual al orden la matriz M y K , quecoincide con el numero de grados de libertad libres de laestructura.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Ortogonalidad de los modos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 53/60
Los modos naturales Φi, Φj , correspondientes a las frecuenciasnaturales ωi, ωj , poseen la propiedad de ser ortogonales a la matriz
de masa M y a la de rigidez K . Ello significa que se verifican lassiguientes relaciones:
ΦT i MΦi = 0 i = j
ΦT j KΦj = 0 i = j
Demostracion. A partir de la ecuacion caracterıstica:det (K − λM ) = 0
para las frecuencias ωi y ωj , se satisface
KΦi = ω2iMΦi
KΦj = ω2jMΦj
Pre-multiplicando las expresiones anteriores por ΦT j y por ΦT
i , seobtiene,
ΦT j KΦi = ω2
iΦT j MΦi
Φ
T
i KΦj = ω
2
jΦ
T
i MΦj
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Ortogonalidad de los modos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 54/60
Como las matrices M y K son simetricas, permiten establecer lassiguientes igualdades
ΦT j KΦi = ω2
iΦT i MΦj
ΦT j KΦi = ω2
jΦT i MΦj
Al restar miembro a miembro estas ecuaciones,
(ω2i − ω2j )ΦT i MΦj = 0
que demuestra la ortogonalidad de los modos naturales respecto dela matriz de masa M , ya que para i = j se verifica
ΦT i MΦj = 0
y al sustituir esta ecuacion en:
ΦT i KΦj = ω2
jΦT i MΦj = 0
que demuestra la ortogonalidad de los modos naturales respecto de
la matriz de rigidez K .
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Metodo de superposicion de modos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 55/60
naturales
Este metodo considera el equilibrio dinamico de una estructura encada instante como el resultado de una combinacion lineal de susmodos naturales. Basandose en esta hipotesis, siendo n el numerode grados de libertad de la estructura, el vector de desplazamientos
nodales U (t) en funcion de los n modos naturales o autovectores Φi
resultaU (t) = AY (t)
dondeA = [Φ1 Φ2 Φ3 . . .Φn]
es la matriz de autovectores y Y (t) es el vector de desplazamientosgeneralizados de orden n y variable con el tiempo t.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Metodo de superposicion de modos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 56/60
naturalesReemplazando U (t) = AY (t) en la ecuacion del equilibrio dinamico,
M U (t) +C U (t) + KU (t) = F (t)
se tiene,MAY (t) +CA Y (t) +KAY (t) = F (t)
y pre-multiplicando esta expresion por la transpuesta de la matriz de
autovectores A, resulta
AT MAY (t) + AT CA Y (t) +AT KAY (t) = AT F (t)
o bienM ∗Y (t) +C ∗Y (t) + K ∗Y (t) = F ∗(t)
donde,M ∗ = AT MA
K ∗ = AT KA
C ∗ = AT CA
F ∗
(t) =AT F
(t)
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
Al f t l lti li i t i i l lt l i

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 57/60
Al efectuar las multiplicaciones matriciales, resulta que cualquiertermino de la matriz producto correspondiente viene dado por:
M ∗ij = AT i MAj
K ∗ij = AT i KAj
siendo por definicion Ai = Φi y Aj = Φj
M ∗
ij = ΦT i MΦj = 0 i = jK ∗ij = ΦT
i KΦj = 0 i = j
por propiedad de ortogonalidad de modos, y en consecuencia M ∗ yK ∗ son matrices diagonales. Haciendo i = j se obtienen los
terminos diagonales,M ∗ii = ΦT
i MΦi
K ∗ii = ΦT i KΦi
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 58/60
Ahora bien, la ecuacion matricial equivalente a las ecuaciones es
KΦi = ω2iMΦi
Luego,al pre-multiplicar por ΦT i
ΦT i KΦi = ω2
iΦT i MΦi
y teniendo en cuenta que: M ∗ii = ΦT i MΦi y K ∗ii = ΦT
i KΦi
K ∗ii = ω2i M ∗ii
que establece la relacion entre los terminos diagonales de lasmatrices K ∗ y M ∗.
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos
En cuanto a la matriz de amortiguamiento C , si se admiteti i t ti R l i h C K βM t

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 59/60
amortiguamiento tipo Rayleigh: C = αK + β M , entonces,
ΦT CΦ = αΦT K ∗Φ+ β ΦT M ∗Φ
⇒C ∗ = αK ∗ +M ∗
Los termino no nulos seran los de la diagonal, esto es cuando i = j ,por lo tanto,
C ∗ii = αK ∗ii + βM ∗ii
Teniendo en cuenta que: K ∗ii = ω2i M ∗ii
C ∗ii = αω2i M ∗ii + βM ∗ii = (αω2
i + β )M ∗ii = ωi
αωi +
β
ωi
M ∗ii ⇒
C ∗ii = 2ω2i ξ iM ∗ii
Finalmente el sistema de ecuaciones de la dinamica resulta en,
M ∗iiΦi(t) + 2ω2i ξ iM ∗iiΦi(t) + ω2
i M ∗iiΦi(t) = F i(t) i = 1, 2, . . . , n
INTRODUCCION Sistema de un grado de libertad Sistemas continuos El metodo de los elementos finitos

7/17/2019 FEM
http://slidepdf.com/reader/full/fem563db91a550346aa9a9a1119 60/60
Conclusion
De esta forma la solucion del problema dinamico lleva consigo la
resolucion de forma independiente de n ecuaciones diferenciales
lineales ordinarias, lo que puede hacerse mediante diferentes tecnicas
de integracion numerica.
Este metodo supone una elevada carga de trabajo computacional
porque primeramente hay que calcular los modos naturales y susfrecuencias. Sin embargo, una vez calculados, pueden ser
almacenados y utilizados para hallar diferentes respuestas dinamicas a
diferentes casos de carga que pueden actuar sobre la estructura.
Debe destacarse que el metodo de superposicion modal es aplicable
unicamente a casos lineales en los que las matricesM
,K
yC
y/o elvector de fuerzas F (t) no dependen del vector de desplazamientos U