Upload
mujtaba-abbas
View
221
Download
4
Tags:
Embed Size (px)
DESCRIPTION
Chapter 3rd Equilibrium
Citation preview
Please note: this sample chapter is unproofed.
p11 6191a_ch03 co_2 Tuesday Mar 13 2001 02:20 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
In many applications of mechanics, the sum of the forces acting on a body is zero, and a stateof equilibrium exists. What are the two primary forces acting on each slowly moving balloon?
Chapter
3EQUILIBRIUM
CH A P T E R OU T L I N E
3/1 Introduction
SECTION A. Equilibrium in Two Dimensions3/2 System Isolation and the Free-Body Diagram3/3 Equilibrium Conditions
SECTION B. Equilibrium in Three Dimensions3/4 Equilibrium Conditions
3/1 INTRODUCTIONStatics deals primarily with the description of the force con-
ditions necessary and sufcient to maintain the equilibrium ofengineering structures. This chapter on equilibrium, therefore,constitutes the most important part of statics, and the proceduresdeveloped here form the basis for solving problems in both staticsand dynamics. We will make continual use of the concepts devel-oped in Chapter 2 involving forces, moments, couples, and resul-tants as we apply the principles of equilibrium.
When a body is in equilibrium, the resultant of all forces act-ing on it is zero. Thus, the resultant force R and the resultantcouple M are both zero, and we have the equilibrium equations
R 5 oF 5 0 M 5 oM 5 0 (3/1)
These requirements are both necessary and sufcient conditionsfor equilibrium.
All physical bodies are three-dimensional, but we can treatmany of them as two-dimensional when the forces to which theyare subjected act in a single plane or can be projected onto a singleplane. When this simplication is not possible, the problem mustbe treated as three-dimensional. We will follow the arrangement
p11 6191a_ch03 co_3 Tuesday Mar 13 2001 02:20 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3
used in Chapter 2, and discuss in Section A the equilibrium ofbodies subjected to two-dimensional force systems and in SectionB the equilibrium of bodies subjected to three-dimensional forcesystems.
S E C T I O N A E Q U I L I B R I U M I N T W O D I M E N S I O N S
3/2 SYSTEM ISOLATIONAND THE FREE-BODY DIAGRAM
Before we apply Eqs. 3/1, we must dene unambiguously theparticular body or mechanical system to be analyzed and repre-sent clearly and completely all forces acting on the body. Omis-sion of a force which acts on the body in question, or inclusion ofa force which does not act on the body, will give erroneous results.
A mechanical system is dened as a body or group of bodieswhich can be conceptually isolated from all other bodies. A systemmay be a single body or a combination of connected bodies. Thebodies may be rigid or nonrigid. The system may also be an iden-tiable uid mass, either liquid or gas, or a combination of uidsand solids. In statics we study primarily forces which act on rigidbodies at rest, although we also study forces acting on uids inequilibrium.
Once we decide which body or combination of bodies to ana-lyze, we then treat this body or combination as a single body iso-lated from all surrounding bodies. This isolation is accomplishedby means of the free-body diagram, which is a diagrammaticrepresentation of the isolated system treated as a single body.The diagram shows all forces applied to the system by mechanicalcontact with other bodies, which are imagined to be removed. Ifappreciable body forces are present, such as gravitational or mag-netic attraction, then these forces must also be shown on the free-body diagram of the isolated system. Only after such a diagramhas been carefully drawn should the equilibrium equations bewritten. Because of its critical importance, we emphasize herethat
the free-body diagram is the most important single step inthe solution of problems in mechanics.
Before attempting to draw a free-body diagram, we must re-call the basic characteristics of force. These characteristics weredescribed in Art. 2/2, with primary attention focused on the vectorproperties of force. Forces can be applied either by direct physicalcontact or by remote action. Forces can be either internal or ex-ternal to the system under consideration. Application of force isaccompanied by reactive force, and both applied and reactive
4 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_4 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
forces may be either concentrated or distributed. The principle oftransmissibility permits the treatment of force as a sliding vectoras far as its external effects on a rigid body are concerned.
We will now use these force characteristics to develop concep-tual models of isolated mechanical systems. These models enableus to write the appropriate equations of equilibrium, which canthen be analyzed.
Modeling the Action of Forces
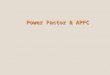
Figure 3/1 shows the common types of force application onmechanical systems for analysis in two dimensions. Each exam-ple shows the force exerted on the body to be isolated, by the bodyto be removed. Newton's third law, which notes the existence of
Art ic le 3/2 System Isolat ion and the Free-Body Diagram 5
p11 6191a_ch03 dm_5 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
q
q
MODELING THE ACTION OF FORCES IN TWO-DIMENSIONAL ANALYSISType of Contact and Force Origin
1. Flexible cable, belt,chain, or rope
2. Smooth surfaces
3. Rough surfaces
4. Roller support
5. Freely sliding guide
Action on Body to be Isolated
Force exerted by a flexible cable is always a tension away from the body in the direction of the cable.
Contact force is compressive and is normal to the surface.
Rough surfaces are capable of supporting a tangential compo-nent F (frictional force) as well as a normal component N of the resultant contact force R.
Roller, rocker, or ball support transmits a compressive force normal to the supporting surface.
Collar or slider free to move along smooth guides; can support force normal to guide only.
q
q
Weight of cablenegligible
Weight of cablenot negligible
T
T
N
N
N
N
F
R
N N
Figure 3/1
an equal and opposite reaction to every action, must be carefullyobserved. The force exerted on the body in question by a contact-ing or supporting member is always in the sense to oppose themovement of the isolated body which would occur if the contact-ing or supporting body were removed.
In Fig. 3/1, Example 1 depicts the action of a exible cable,belt, rope, or chain on the body to which it is attached. Becauseof its exibility, a rope or cable is unable to offer any resistanceto bending, shear, or compression and therefore exerts only a ten-sion force in a direction tangent to the cable at its point of at-tachment. The force exerted by the cable on the body to which itis attached is always away from the body. When the tension T islarge compared with the weight of the cable, we may assume that
6 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_6 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
MODELING THE ACTION OF FORCES IN TWO-DIMENSIONAL ANALYSIS (cont.)Type of Contact and Force Origin
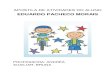
6. Pin connection
7. Built-in or fixed support
8. Gravitational attraction
9. Spring action
Action on Body to be Isolated
A freely hinged pin connection is capable of supporting a force in any direction in the plane normal to the axis; usually shown as two components Rx and Ry. A pin not free to turn may also support a couple M.
A built-in or fixed support is capable of supporting an axial force F, a transverse force V (shear force), and a couple M (bending moment) to prevent rotation.
The resultant of gravitational attraction on all elements of a body of mass m is the weight W = mg and acts toward the center of the earth through the center mass G.
Spring force is tensile if spring is stretched and compressive if compressed. For a linearly elastic spring the stiffness k is the force required to deform the spring a unit distance.
Pinfree
to turn
Pinnot freeto turn
Ry
Rx
RyM
Rx
Weld
A
M
F
V
orAA
W = mg
F
Gm
Fx
F = kxHardening
NonlinearLinearNeutralposition
Softening
F
x
F
x
Figure 3/1, continued
the cable forms a straight line. When the cable weight is not neg-ligible compared with its tension, the sag of the cable becomesimportant, and the tension in the cable changes direction andmagnitude along its length.
When the smooth surfaces of two bodies are in contact, as inExample 2, the force exerted by one on the other is normal to thetangent to the surfaces and is compressive. Although no actualsurfaces are perfectly smooth, we can assume this to be so forpractical purposes in many instances.
When mating surfaces of contacting bodies are rough, as inExample 3, the force of contact is not necessarily normal to thetangent to the surfaces, but may be resolved into a tangential orfrictional component F and a normal component N.
Example 4 illustrates a number of forms of mechanical sup-port which effectively eliminate tangential friction forces. Inthese cases the net reaction is normal to the supporting surface.
Example 5 shows the action of a smooth guide on the body itsupports. There cannot be any resistance parallel to the guide.
Example 6 illustrates the action of a pin connection. Such aconnection can support force in any direction normal to the axisof the pin. We usually represent this action in terms of two rec-tangular components. The correct sense of these components ina specic problem depends on how the member is loaded. Whennot otherwise initially known, the sense is arbitrarily assignedand the equilibrium equations are then written. If the solution ofthese equations yields a positive algebraic sign for the force com-ponent, the assigned sense is correct. A negative sign indicatesthe sense is opposite to that initially assigned.
If the joint is free to turn about the pin, the connection cansupport only the force R. If the joint is not free to turn, the con-nection can also support a resisting couple M. The sense of M isarbitrarily shown here, but the true sense depends on how themember is loaded.
Example 7 shows the resultants of the rather complex distri-bution of force over the cross section of a slender bar or beam ata built-in or xed support. The sense of the reactions F and V andthe bending couple M in a given problem depends, of course, onhow the member is loaded.
One of the most common forces is that due to gravitationalattraction, Example 8. This force affects all elements of mass ina body and is, therefore, distributed throughout it. The resultantof the gravitational forces on all elements is the weight W 5 mgof the body, which passes through the center of mass G and isdirected toward the center of the earth for earthbound structures.The location of G is frequently obvious from the geometry of thebody, particularly where there is symmetry. When the location isnot readily apparent, it must be determined by experiment orcalculations.
Similar remarks apply to the remote action of magnetic andelectric forces. These forces of remote action have the same over-
Art ic le 3/2 System Isolat ion and the Free-Body Diagram 7
p11 6191a_ch03 dm_7 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
all effect on a rigid body as forces of equal magnitude and direc-tion applied by direct external contact.
Example 9 illustrates the action of a linear elastic spring andof a nonlinear spring with either hardening or softening charac-teristics. The force exerted by a linear spring, in tension or com-pression, is given by F 5 kx, where k is the stiffness of the springand x is its deformation measured from the neutral or unde-formed position.
The representations in Fig. 3/1 are not free-body diagrams,but are merely elements used to construct free-body diagrams.Study these nine conditions and identify them in the problemwork so that you can draw the correct free-body diagrams.
8 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_8 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
Construction of Free-Body Diagrams
The full procedure for drawing a free-body diagram which iso-lates a body or system consists of the following steps.
Step 1. Decide which system to isolate. The system chosenshould usually involve one or more of the desired unknownquantities.
Step 2. Next isolate the chosen system by drawing a diagramwhich represents its complete external boundary. This boundarydenes the isolation of the system from all other attracting orcontacting bodies, which are considered removed. This step is of-ten the most crucial of all. Make certain that you have completelyisolated the system before proceeding with the next step.
Step 3. Identify all forces which act on the isolated systemas applied by the removed contacting and attracting bodies, andrepresent them in their proper positions on the diagram of theisolated system. Make a systematic traverse of the entire bound-ary to identify all contact forces. Include body forces such asweights, where appreciable. Represent all known forces by vectorarrows, each with its proper magnitude, direction, and sense in-dicated. Each unknown force should be represented by a vectorarrow with the unknown magnitude or direction indicated bysymbol. If the sense of the vector is also unknown, you must ar-bitrarily assign a sense. The subsequent calculations with theequilibrium equations will yield a positive quantity if the correctsense was assumed and a negative quantity if the incorrect sensewas assumed. It is necessary to be consistent with the assignedcharacteristics of unknown forces throughout all of the calcula-tions. If you are consistent, the solution of the equilibrium equa-tions will reveal the correct senses.
Step 4. Show the choice of coordinate axes directly on thediagram. Pertinent dimensions may also be represented for con-venience. Note, however, that the free-body diagram serves thepurpose of focusing attention on the action of the external forces,and therefore the diagram should not be cluttered with excessive
extraneous information. Clearly distinguish force arrows from ar-rows representing quantities other than forces. For this purposea colored pencil may be used.
Art ic le 3/2 System Isolat ion and the Free-Body Diagram 9
p11 6191a_ch03 dm_9 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
Completion of the foregoing four steps will produce a correctfree-body diagram to use in applying the governing equations,both in statics and in dynamics. Be careful not to omit from thefree-body diagram certain forces which may not appear at rstglance to be needed in the calculations. It is only through completeisolation and a systematic representation of all external forcesthat a reliable accounting of the effects of all applied and reactiveforces can be made. Very often a force which at rst glance maynot appear to inuence a desired result does indeed have an in-uence. Thus, the only safe procedure is to include on the free-body diagram all forces whose magnitudes are not obviouslynegligible.
The free-body method is extremely important in mechanicsbecause it ensures an accurate denition of a mechanical systemand focuses attention on the exact meaning and application of theforce laws of statics and dynamics. Review the foregoing foursteps for constructing a free-body diagram while studying thesample free-body diagrams shown in Fig. 3/2 and the SampleProblems which appear at the end of the next article.
Examples of Free-Body Diagrams
Figure 3/2 gives four examples of mechanisms and structurestogether with their correct free-body diagrams. Dimensions andmagnitudes are omitted for clarity. In each case we treat the en-tire system as a single body, so that the internal forces are notshown. The characteristics of the various types of contact forcesillustrated in Fig. 3/1 are used in the four examples as they apply.
In Example 1 the truss is composed of structural elementswhich, taken all together, constitute a rigid framework. Thus, wemay remove the entire truss from its supporting foundation andtreat it as a single rigid body. In addition to the applied externalload P, the free-body diagram must include the reactions on thetruss at A and B. The rocker at B can support a vertical forceonly, and this force is transmitted to the structure at B (Example4 of Fig. 3/1). The pin connection at A (Example 6 of Fig. 3/1) iscapable of supplying both a horizontal and a vertical force com-ponent to the truss. If the total weight of the truss members isappreciable compared with P and the forces at A and B, then theweights of the members must be included on the free-body dia-gram as external forces.
In this relatively simple example it is clear that the verticalcomponent Ay must be directed down to prevent the truss fromrotating clockwise about B. Also, the horizontal component Axwill be to the left to keep the truss from moving to the right underthe inuence of the horizontal component of P. Thus, in con-
structing the free-body diagram for this simple truss, we can eas-ily perceive the correct sense of each of the components of forceexerted on the truss by the foundation at A and can, therefore,represent its correct physical sense on the diagram. When thecorrect physical sense of a force or its component is not easilyrecognized by direct observation, it must be assigned arbitrarily,and the correctness of or error in the assignment is determinedby the algebraic sign of its calculated value.
In Example 2 the cantilever beam is secured to the wall andsubjected to three applied loads. When we isolate that part of thebeam to the right of the section at A, we must include the reactiveforces applied to the beam by the wall. The resultants of thesereactive forces are shown acting on the section of the beam (Ex-
10 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_10 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
A B
P
Ax
F3 F2 F1
Ay By
BxBy
P
y
x
y
x
y
x
y
x
A Mass m
F3 F2 F1
F
M
M
B
AP P
N
V2. Cantilever beam
3. Beam
4. Rigid system of interconnected bodies analyzed as a single unit
1. Plane truss
Weight of trussassumed negligiblecompared with P
Mechanical System FreeBody Diagram of Isolated Body
SAMPLE FREEBODY DIAGRAMS
W = mg
W = mg
W = mg
Smooth surfacecontact at A.Mass m
P
A B
m
M
BxBy
Weight of mechanismneglected
P
Ay
Figure 3/2
ample 7 of Fig. 3/1). A vertical force V to counteract the excess ofdownward applied force is shown, and a tension F to balance theexcess of applied force to the right must also be included. Then,to prevent the beam from rotating about A, a counterclockwisecouple M is also required. The weight mg of the beam must berepresented through the mass center (Example 8 of Fig. 3/1).
In the free-body diagram of Example 2, we have representedthe somewhat complex system of forces which actually act on thecut section of the beam by the equivalent forcecouple system inwhich the force is broken down into its vertical component V(shear force) and its horizontal component F (tensile force). Thecouple M is the bending moment in the beam. The free-body di-agram is now complete and shows the beam in equilibrium underthe action of six forces and one couple.
In Example 3 the weight W 5 mg is shown acting through thecenter of mass of the beam, whose location is assumed known(Example 8 of Fig. 3/1). The force exerted by the corner A on thebeam is normal to the smooth surface of the beam (Example 2 ofFig. 3/1). To perceive this action more clearly, visualize an en-largement of the contact point A, which would appear somewhatrounded, and consider the force exerted by this rounded corneron the straight surface of the beam, which is assumed to besmooth. If the contacting surfaces at the corner were not smooth,a tangential frictional component of force could exist. In additionto the applied force P and couple M, there is the pin connectionat B, which exerts both an x- and a y-component of force on thebeam. The positive senses of these components are assignedarbitrarily.
In Example 4 the free-body diagram of the entire isolatedmechanism contains three unknown forces if the loads mg and Pare known. Any one of many internal congurations for securingthe cable leading from the mass m would be possible without af-fecting the external response of the mechanism as a whole, andthis fact is brought out by the free-body diagram. This hypothet-ical example is used to show that the forces internal to a rigidassembly of members do not inuence the values of the externalreactions.
We use the free-body diagram in writing the equilibriumequations, which are discussed in the next article. When theseequations are solved, some of the calculated force magnitudesmay be zero. This would indicate that the assumed force does notexist. In Example 1 of Fig. 3/2, any of the reactions Ax, Ay, or Bycan be zero for specic values of the truss geometry and of themagnitude, direction, and sense of the applied load P. A zero re-action force is often difcult to identify by inspection, but can bedetermined by solving the equilibrium equations.
Similar comments apply to calculated force magnitudeswhich are negative. Such a result indicates that the actual senseis the opposite of the assumed sense. The assumed positive sensesof Bx and By in Example 3 and By in Example 4 are shown on thefree-body diagrams. The correctness of these assumptions is
Art ic le 3/2 System Isolat ion and the Free-Body Diagram 11
p11 6191a_ch03 dm_11 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
proved or disproved according to whether the algebraic signs ofthe computed forces are plus or minus when the calculations arecarried out in an actual problem.
The isolation of the mechanical system under considerationis a crucial step in the formulation of the mathematical model.The most important aspect to the correct construction of the all-important free-body diagram is the clear-cut and unambiguousdecision as to what is included and what is excluded. This deci-sion becomes unambiguous only when the boundary of the free-body diagram represents a complete traverse of the body orsystem of bodies to be isolated, starting at some arbitrary pointon the boundary and returning to that same point. The systemwithin this closed boundary is the isolated free body, and all con-tact forces and all body forces transmitted to the system acrossthe boundary must be accounted for.
The following exercises provide practice with drawing free-body diagrams. This practice is helpful before using such dia-grams in the application of the principles of force equilibrium inthe next article.
12 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_12 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
FREE-BODY DIAGRAM EXERCISES
3/A In each of the ve following examples, the body to beisolated is shown in the left-hand diagram, and an in-complete free-body diagram (FBD) of the isolated bodyis shown on the right. Add whatever forces are nec-
Art ic le 3/2 Free-Body Diagram Exerc ises 13
p11 6191a_ch03 dm_13 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
essary in each case to form a complete free-body dia-gram. The weights of the bodies are negligible unlessotherwise indicated. Dimensions and numerical val-ues are omitted for simplicity.
1. Bell crank supporting mass m with pin support at A.
2. Control lever applying torque to shaft at O.
3. Boom OA, of negligible mass compared with mass m. Boom hinged at O and supported by hoisting cable at B.
4. Uniform crate of mass m leaning against smooth vertical wall and supported on a rough horizontal surface.
5. Loaded bracket supported by pin connection at A and fixed pin in smooth slot at B.
Body Incomplete FBD
m
A
O
A
B
A
OO
A
B
T
A
mgT
Flexiblecable
Pull P P
FO
m mg
mg
B
B
ALoad L
B
AL
Figure 3/A
3/B In each of the ve following examples, the body to beisolated is shown in the left-hand diagram, and eithera wrong or an incomplete free-body diagram (FBD) isshown on the right. Make whatever changes or addi-
14 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_14 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
tions are necessary in each case to form a correct andcomplete free-body diagram. The weights of the bodiesare negligible unless otherwise indicated. Dimensionsand numerical values are omitted for simplicity.
mg
mg
1.
Wrong or Incomplete FBDBody
P
P
N
N
PLawn roller of mass m beingpushed up incline .
5. Bent rod welded tosupport at A and subjected to two forces and couple.
4. Supporting anglebracket for frame.Pin joints
3. Uniform pole of mass m beinghoisted into posi-tion by winch. Horizontal sup-porting surfacenotched to preventslipping of pole.
2. Pry bar lifting body A having smooth horizontal surface. Bar rests on horizontal rough surface.
q
q
P
T
R
R
A
Notch
y
x
M
F
M
F
P
A y
F
A
A
B
P
A
B
Figure 3/B
3/C Draw a complete and correct free-body diagram ofeach of the bodies designated in the statements. Theweights of the bodies are signicant only if the massis stated. All forces, known and unknown, should be
Art ic le 3/2 Free-Body Diagram Exerc ises 15
p11 6191a_ch03 dm_15 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
labeled. (Note: The sense of some reaction componentscannot always be determined without numericalcalculation.)
m
L
A
A B
A
A
B
C
A
B
B
3. Loaded truss supported by pin joint at A and by cable at B.
2. Wheel of mass m on verge of beingrolled over curb by pull P.
4. Uniform bar of mass m and roller ofmass m0 taken together. Subjected to couple M and supported as shown.Roller is free to turn.
7. Uniform heavy plate of mass msupported in vertical plane by cableC and hinge A.
6. Bar, initially horizontal but deflected under load L. Pinned to rigid support at each end.
8. Entire frame, pulleys, and contactingcable to be isolated as a single unit.
1. Uniform horizontal bar of mass m suspended by vertical cable at A andsupported by rough inclined surface at B.
5. Uniform grooved wheel of mass msupported by a rough surface and by action of horizontal cable.
m0M
A
m
P
m
L
m
L
Figure 3/C
3/3 EQUILIBRIUM CONDITIONSIn Art. 3/1 we dened equilibrium as the condition in which
the resultant of all forces and moments acting on a body is zero.Stated in another way, a body is in equilibrium if all forces andmoments applied to it are in balance. These requirements arecontained in the vector equations of equilibrium, Eqs. 3/1, whichin two dimensions may be written in scalar form as
oF 5 0 oF 5 0 oM 5 0 (3/2)x y O
The third equation represents the zero sum of the moments of allforces about any point O on or off the body. Equations 3/2 are thenecessary and sufcient conditions for complete equilibrium intwo dimensions. They are necessary conditions because, if theyare not satised, there can be no force or moment balance. Theyare sufcient because once they are satised, there can be noimbalance, and equilibrium is assured.
The equations relating force and acceleration for rigid-bodymotion are developed in Vol. 2 Dynamics from Newton's secondlaw of motion. These equations show that the acceleration of themass center of a body is proportional to the resultant force oFacting on the body. Consequently, if a body moves with constantvelocity (zero acceleration), the resultant force on it must be zero,and the body may be treated as in a state of translationalequilibrium.
For complete equilibrium in two dimensions, all three of Eqs.3/2 must hold. However, these conditions are independent re-quirements, and one may hold without another. Take, for exam-ple, a body which slides along a horizontal surface withincreasing velocity under the action of applied forces. The forceequilibrium equations will be satised in the vertical directionwhere the acceleration is zero, but not in the horizontal direction.Also, a body, such as a ywheel, which rotates about its xedmass center with increasing angular speed is not in rotationalequilibrium, but the two forceequilibrium equations will besatised.
Categories of Equilibrium
Applications of Eqs. 3/2 fall naturally into a number of cate-gories which are easily identied. The categories of force systemsacting on bodies in two-dimensional equilibrium are summarizedin Fig. 3/3 and are explained further as follows.
Category 1, equilibrium of collinear forces, clearly requiresonly the one force equation in the direction of the forces (x-direc-tion), since all other equations are automatically satised.
Category 2, equilibrium of forces which lie in a plane (x-yplane) and are concurrent at a point O, requires the two force
16 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_16 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
equations only, since the moment sum about O, that is, about az-axis through O, is necessarily zero. Included in this category isthe case of the equilibrium of a particle.
Category 3, equilibrium of parallel forces in a plane, requiresthe one force equation in the direction of the forces (x-direction)and one moment equation about an axis (z-axis) normal to theplane of the forces.
Category 4, equilibrium of a general system of forces in aplane (x-y), requires the two force equations in the plane and onemoment equation about an axis (z-axis) normal to the plane.
Two- and Three-Force Members
You should be alert to two frequently occurring equilibriumsituations. The rst situation is the equilibrium of a body underthe action of two forces only. Two examples are shown in Fig. 3/4,and we see that for such a two-force member to be in equilibrium,the forces must be equal, opposite, and collinear. The shape of themember does not affect this simple requirement. In the illustra-tions cited, we consider the weights of the members to be negli-gible compared with the applied forces.
Art ic le 3/3 Equi l ibr ium Condi t ions 17
p11 6191a_ch03 dm_17 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
y
x
y
x
y
x
xF3
F1
2. Concurrent at a point
3. Parallel
4. General
1. Collinear
Force System Independent EquationsFreeBody Diagram
CATEGORIES OF EQUILIBRIUM IN TWO DIMENSIONS
F2
F1
F1
F1 F3
F3F4
F4
F4
F2
F2
F2
F3
S Fx = 0
Fx = 0S
Fx = 0S
Fx = 0S
Fy = 0S
Mz = 0S
Mz = 0S
Fy = 0SM
O
Figure 3/3
PP
P P
Two-force members
Figure 3/4
The second situation is a three-force member, which is a bodyunder the action of three forces, Fig. 3/5a. We see that equilib-rium requires the lines of action of the three forces to be concur-rent. If they were not concurrent, then one of the forces wouldexert a resultant moment about the point of intersection of theother two, which would violate the requirement of zero momentabout every point. The only exception occurs when the threeforces are parallel. In this case we may consider the point of con-currency to be at innity.
The principle of the concurrency of three forces in equilibriumis of considerable use in carrying out a graphical solution of theforce equations. In this case the polygon of forces is drawn andmade to close, as shown in Fig. 3/5b. Frequently, a body in equi-librium under the action of more than three forces may be re-duced to a three-force member by a combination of two or moreof the known forces.
Alternative Equilibrium Equations
In addition to Eqs. 3/2, there are two other ways to expressthe general conditions for the equilibrium of forces in two dimen-sions. The rst way is illustrated in Fig. 3/6, parts (a) and (b). Forthe body shown in Fig. 3/6a, if oMA 5 0, then the resultant, if itstill exists, cannot be a couple, but must be a force R passingthrough A. If now the equation oFx 5 0 holds, where the x-direc-tion is arbitrary, it follows from Fig. 3/6b that the resultant forceR, if it still exists, not only must pass through A, but also mustbe perpendicular to the x-direction as shown. Now, if oMB 5 0,where B is any point such that the line AB is not perpendicularto the x-direction, we see that R must be zero, and thus the body
18 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_18 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
S MA = 0 satisfied
S MA = 0 satisfied
S MA = 0 S Fx = 0
satisfied
S MA = 0 S MB = 0
satisfied
(a) (b)
x
(c) (d)
R R
A A
AA
B
C
B
R R
Figure 3/6
F1
F1
F3
F3
F2
F2
Three-force member(a)
Closed polygonsatisfies
(b)S F = 0
O
Figure 3/5
is in equilibrium. Therefore, an alternative set of equilibriumequations is
oF 5 0 oM 5 0 oM 5 0x A B
where the two points A and B must not lie on a line perpendicularto the x-direction.
A third formulation of the conditions of equilibrium may bemade for a coplanar force system. This is illustrated in Fig. 3/6,parts (c) and (d). Again, if oMA 5 0 for any body such as thatshown in Fig. 3/6c, the resultant, if any, must be a force R throughA. In addition, if oMB 5 0, the resultant, if one still exists, mustpass through B as shown in Fig. 3/6d. Such a force cannot exist,however, if oMC 5 0, where C is not collinear with A and B. Thus,we may write the equations of equilibrium as
oM 5 0 oM 5 0 oM 5 0A B C
where A, B, and C are any three points not on the same straightline.
When equilibrium equations are written which are not inde-pendent, redundant information is obtained, and a correct solu-tion of the equations will yield 0 5 0. For example, for a generalproblem in two dimensions with three unknowns, three momentequations written about three points which lie on the samestraight line are not independent. Such equations will containduplicated information, and solution of two of them can at bestdetermine two of the unknowns, with the third equation merelyverifying the identity 0 5 0.
Constraints and Statical Determinacy
The equilibrium equations developed in this article are bothnecessary and sufcient conditions to establish the equilibriumof a body. However, they do not necessarily provide all the infor-mation required to calculate all the unknown forces which mayact on a body in equilibrium. Whether the equations are adequateto determine all the unknowns depends on the characteristics ofthe constraints against possible movement of the body providedby its supports. By constraint we mean the restriction ofmovement.
In Example 4 of Fig. 3/1 the roller, ball, and rocker provideconstraint normal to the surface of contact, but none tangent tothe surface. Thus, a tangential force cannot be supported. For thecollar and slider of Example 5, constraint exists only normal tothe guide. In Example 6 the xed-pin connection provides con-straint in both directions, but offers no resistance to rotationabout the pin unless the pin is not free to turn. The xed supportof Example 7, however, offers constraint against rotation as wellas lateral movement.
Art ic le 3/3 Equi l ibr ium Condi t ions 19
p11 6191a_ch03 dm_19 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
If the rocker which supports the truss of Example 1 in Fig.3/2 were replaced by a pin joint, as at A, there would be one ad-ditional constraint beyond those required to support an equilib-rium conguration with no freedom of movement. The threescalar conditions of equilibrium, Eqs. 3/2, would not provide suf-cient information to determine all four unknowns, since Ax andBx could not be solved for separately; only their sum could bedetermined. These two components of force would be dependenton the deformation of the members of the truss as inuenced bytheir corresponding stiffness properties. The horizontal reactionsAx and Bx would also depend on any initial deformation requiredto t the dimensions of the structure to those of the foundationbetween A and B. Thus, we cannot determine Ax and Bx by a rigid-body analysis.
Again referring to Fig. 3/2, we see that if the pin B in Example3 were not free to turn, the support could transmit a couple tothe beam through the pin. Therefore, there would be four un-known supporting reactions acting on the beam, namely, the forceat A, the two components of force at B, and the couple at B. Con-sequently the three independent scalar equations of equilibriumwould not provide enough information to compute all fourunknowns.
A rigid body, or rigid combination of elements treated as asingle body, which possesses more external supports or con-straints than are necessary to maintain an equilibrium positionis called statically indeterminate. Supports which can be removedwithout destroying the equilibrium condition of the body are saidto be redundant. The number of redundant supporting elementspresent corresponds to the degree of statical indeterminacy andequals the total number of unknown external forces, minus thenumber of available independent equations of equilibrium. Onthe other hand, bodies which are supported by the minimumnumber of constraints necessary to ensure an equilibrium cong-uration are called statically determinate, and for such bodies theequilibrium equations are sufcient to determine the unknownexternal forces.
The problems on equilibrium in this article and throughoutVol. 1 Statics are generally restricted to statically determinatebodies where the constraints are just sufcient to ensure a stableequilibrium conguration and where the unknown supportingforces can be completely determined by the available independentequations of equilibrium.
We must be aware of the nature of the constraints before weattempt to solve an equilibrium problem. A body can be recog-nized as statically indeterminate when there are more unknownexternal reactions than there are available independent equilib-rium equations for the force system involved. It is always well tocount the number of unknown variables on a given body and tobe certain that an equal number of independent equations can bewritten; otherwise, effort might be wasted in attempting an im-possible solution with the aid of the equilibrium equations only.
20 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_20 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
The unknown variables may be forces, couples, distances, orangles.
Adequacy of Constraints
In discussing the relationship between constraints and equi-librium, we should look further at the question of the adequacyof constraints. The existence of three constraints for a two-dimensional problem does not always guarantee an equilibriumconguration. Figure 3/7 shows four different types of con-straints. In part a of the gure, point A of the rigid body is xedby the two links and cannot move, and the third link preventsany rotation about A. Thus, this body is completely xed withthree adequate (proper) constraints.
In part b of the gure, the third link is positioned so that theforce transmitted by it passes through point A where the othertwo constraint forces act. Thus, this conguration of constraintscan offer no initial resistance to rotation about A, which wouldoccur when external loads were applied to the body. We conclude,therefore, that this body is incompletely xed under partialconstraints.
The conguration in part c of the gure gives us a similarcondition of incomplete xity because the three parallel linkscould offer no initial resistance to a small vertical movement ofthe body as a result of external loads applied to it in this direction.The constraints in these two examples are often termed improper.
In part d of Fig. 3/7 we have a condition of complete xity,with link 4 acting as a fourth constraint which is unnecessary tomaintain a xed position. Link 4, then, is a redundant constraint,and the body is statically indeterminate.
As in the four examples of Fig. 3/7, it is generally possible bydirect observation to conclude whether the constraints on a bodyin two-dimensional equilibrium are adequate (proper), partial(improper), or redundant. As indicated previously, the vast ma-jority of problems in this book are statically determinate withadequate (proper) constraints.
Problem Solution
The sample problems at the end of this article illustrate theapplication of free-body diagrams and the equations of equilib-rium to typical statics problems. These solutions should be stud-ied thoroughly. In the problem work of this chapter andthroughout mechanics, it is important to develop a logical andsystematic approach which includes the following steps:
1. Identify clearly the quantities which are known and unknown.
2. Make an unambiguous choice of the body (or system of connected-bodies treated as a single body) to be isolated and draw its com-plete free-body diagram, labeling all external known and unknownbut identiable forces and couples which act on it.
Art ic le 3/2 System Isolat ion and the Free-Body Diagram 21
p11 6191a_ch03 dm_21 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
A
4
A
Complete fixityAdequate constraints
(a)
Excessive fixityRedundant constraint
(d)
Incomplete fixityPartial constraints
(c)
A
Incomplete fixityPartial constraints
(b)
Figure 3/7
3. Choose a convenient set of reference axes, always using right-handed axes when vector cross products are employed. Choose mo-ment centers with a view to simplifying the calculations.Generally the best choice is one through which as many unknownforces pass as possible. Simultaneous solutions of equilibriumequations are frequently necessary, but can be minimized oravoided by a careful choice of reference axes and moment centers.
4. Identify and state the applicable force and moment principles orequations which govern the equilibrium conditions of the problem.In the following sample problems these relations are shown inbrackets and precede each major calculation.
5. Match the number of independent equations with the number ofunknowns in each problem.
6. Carry out the solution and check the results. In many problemsengineering judgment can be developed by rst making a reason-able guess or estimate of the result prior to the calculation andthen comparing the estimate with the calculated value.
22 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_22 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
Sample Problem 3/1
Determine the magnitudes of the forces C and T, which, along with the otherthree forces shown, act on the bridge-truss joint.
Solution. The given sketch constitutes the free-body diagram of the isolatedsection of the joint in question and shows the ve forces which are in equilibrium.
Solution I (scalar algebra). For the x-y axes as shown we have
[oFx 5 0] 8 1 T cos 407 1 C sin 207 2 16 5 0
0.766T 1 0.342C 5 8 (a)
[oFy 5 0] T sin 407 2 C cos 207 2 3 5 0
0.643T 2 0.940C 5 3 (b)
Simultaneous solution of Eqs. (a) and (b) produces
T 5 9.09 kN C 5 3.03 kN Ans.
Solution II (scalar algebra). To avoid a simultaneous solution, we may useaxes x9-y9 with the rst summation in the y9-direction to eliminate reference toT. Thus,
5 0][oF 9y 2C cos 207 2 3 cos 407 2 8 sin 407 1 16 sin 407 5 0
C 5 3.03 kN Ans.
5 0][oF 9x T 1 8 cos 407 2 16 cos 407 2 3 sin 407 2 3.03 sin 207 5 0
T 5 9.09 kN Ans.
Solution III (vector algebra). With unit vectors i and j in the x- and y-direc-tions, the zero summation of forces for equilibrium yields the vector equation
[oF 5 0] 8i 1 (T cos 407)i 1 (T sin 407)j 2 3j 1 (C sin 207)i
2 (C cos 207)j 2 16i 5 0
Equating the coefcients of the i- and j-terms to zero gives
8 1 T cos 407 1 C sin 207 2 16 5 0
T sin 407 2 3 2 C cos 207 5 0
which are the same, of course, as Eqs. (a) and (b), which we solved above.
Solution IV (geometric). The polygon representing the zero vector sum of theve forces is shown. Equations (a) and (b) are seen immediately to give the pro-jections of the vectors onto the x- and y-directions. Similarly, projections onto thex9- and y9-directions give the alternative equations in Solution II.
A graphical solution is easily obtained. The known vectors are laid off head-to-tail to some convenient scale, and the directions of T and C are then drawnto close the polygon. The resulting intersection at point P completes the solution,thus enabling us to measure the magnitudes of T and C directly from the drawingto whatever degree of accuracy we incorporate in the construction.
Art ic le 3/3 Equi l ibr ium Condi t ions 23
p11 6191a_ch03 dm_23 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
Helpful Hints
va Since this is a problem of concurrentforces, no moment equation isnecessary.
vb The selection of reference axes to fa-cilitate computation is always an im-portant consideration. Alternativelyin this example we could take a setof axes along and normal to the di-rection of C and employ a force sum-mation normal to C to eliminate it.
x
T
x
y
y
16 kN
3 kN
C
8 kN40
20
va
vb
vc
40
20
3 kN
8 kN
P
TC
16 kN
vc The known vectors may be added inany order desired, but they must beadded before the unknown vectors.
Sample Problem 3/2
Calculate the tension T in the cable which supports the 1000-lb load withthe pulley arrangement shown. Each pulley is free to rotate about its bearing,and the weights of all parts are small compared with the load. Find the magni-tude of the total force on the bearing of pulley C.
Solution. The free-body diagram of each pulley is drawn in its relative positionto the others. We begin with pulley A, which includes the only known force. Withthe unspecied pulley radius designated by r, the equilibrium of moments aboutits center O and the equilibrium of forces in the vertical direction require
[oM 5 0] T r 2 T r 5 0 T 5 TO 1 2 1 2
[oF 5 0] T 1 T 2 1000 5 0 2T 5 1000 T 5 T 5 500 lby 1 2 1 1 2
From the example of pulley A we may write the equilibrium of forces on pulleyB by inspection as
T 5 T 5 T /2 5 250 lb3 4 2
For pulley C the angle u 5 307 in no way affects the moment of T about the centerof the pulley, so that moment equilibrium requires
T 5 T or T 5 250 lb Ans.3
Equilibrium of the pulley in the x- and y-directions requires
[oF 5 0] 250 cos 307 2 F 5 0 F 5 217 lbx x x
[oF 5 0] F 1 250 sin 307 2 250 5 0 F 5 125 lby y y2 2 2 2[F 5 ! ] F 5 ! 5 250 lb Ans.F 1 F (217) 1 (125)x y
24 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_24 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
Sample Problem 3/3
The uniform 100-kg I-beam is supported initially by its end rollers on thehorizontal surface at A and B. By means of the cable at C it is desired to elevateend B to a position 3 m above end A. Determine the required tension P, thereaction at A, and the angle u made by the beam with the horizontal in theelevated position.
Solution. In constructing the free-body diagram, we note that the reaction onthe roller at A and the weight are vertical forces. Consequently, in the absenceof other horizontal forces, P must also be vertical. From Sample Problem 3/2 wesee immediately that the tension P in the cable equals the tension P applied tothe beam at C.
Moment equilibrium about A eliminates force R and gives
P(6 cos u) 2 981(4 cos u) 5 0 P 5 654 N Ans.[oMA 5 0]
Equilibrium of vertical forces requires
654 1 R 2 981 5 0 R 5 327 N Ans.[oFy 5 0]
The angle u depends only on the specied geometry and is
sin u 5 3/8 u 5 22.07 Ans.
A
B
C = 30q
T
1000 lb
va
A
B
C
T30
O
T1T2
T3T4Fy
Fx
1000 lb
y
x
Helpful Hints
va Clearly theradiusrdoesnotinuencethe results. Once we have analyzed asimple pulley, the results should beperfectly clear by inspection.
Helpful Hints
va Clearly the equilibrium of this par-allel force system is independent of u.
va
P
CA B
2 m6 m
C
P
A
R
B2 m
2 m
100 (9.81) N4 m 3 m
xq
y
Sample Problem 3/4
Determine the magnitude T of the tension in the supporting cable and themagnitude of the force on the pin at A for the jib crane shown. The beam AB isa standard 0.5-m I-beam with a mass of 95 kg per meter of length.
Algebraic solution. The system is symmetrical about the vertical x-y planethrough the center of the beam, so the problem may be analyzed as the equilib-rium of a coplanar force system. The free-body diagram of the beam is shown inthe gure with the pin reaction at A represented in terms of its two rectangularcomponents. The weight of the beam is 95(1023)(5)9.81 5 4.66 kN and actsthrough its center. Note that there are three unknowns Ax, Ay, and T which maybe found from the three equations of equilibrium. We begin with a moment equa-tion about A, which eliminates two of the three unknowns from the equation. Inapplying the moment equation about A, it is simpler to consider the moments ofthe x- and y-components of T than it is to compute the perpendicular distancefrom T to A. Hence, with the counterclockwise sense as positive we write
(T cos 257)0.25 1 (T sin 257)(5 2 0.12)[oMA 5 0]
2 10(5 2 1.5 2 0.12) 2 4.66(2.5 2 0.12) 5 0
T 5 19.61 kN Ans.from which
Equating the sums of forces in the x- and y-directions to zero gives
[oF 5 0] A 2 19.61 cos 257 5 0 A 5 17.77 kNx x x
[oF 5 0] A 1 19.61 sin 257 2 4.66 2 10 5 0 A 5 6.37 kNy y y2 2 2 2[A 5 ! ] A 5 ! A 5 18.88 kN Ans.A 1 A (17.77) 1 (6.37)x y
Graphical solution. The principle that three forces in equilibrium must beconcurrent is utilized for a graphical solution by combining the two known ver-tical forces of 4.66 and 10 kN into a single 14.66-kN force, located as shown onthe modied free-body diagram of the beam in the lower gure. The position ofthis resultant load may easily be determined graphically or algebraically. Theintersection of the 14.66-kN force with the line of action of the unknown tensionT denes the point of concurrency O through which the pin reaction A must pass.The unknown magnitudes of T and A may now be found by adding the forceshead-to-tail to form the closed equilibrium polygon of forces, thus satisfying theirzero vector sum. After the known vertical load is laid off to a convenient scale,as shown in the lower part of the gure, a line representing the given directionof the tension T is drawn through the tip of the 14.66-kN vector. Likewise a linerepresenting the direction of the pin reaction A, determined from the concurrencyestablished with the free-body diagram, is drawn through the tail of the 14.66-kN vector. The intersection of the lines representing vectors T and A establishesthe magnitudes T and A necessary to make the vector sum of the forces equal tozero. These magnitudes are scaled from the diagram. The x- and y-componentsof A may be constructed on the force polygon if desired.
Art ic le 3/3 Equi l ibr ium Condi t ions 25
p11 6191a_ch03 dm_25 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
Helpful Hints
va The justication for this step isVarig-non's theorem, explained in Art. 2/4.Be prepared to take full advantage ofthisprinciple frequently.
vb The calculation of moments in two-dimensional problems is generallyhandled more simply by scalar alge-bra than by the vector cross productr3F. Inthreedimensions,asweshallsee later, the reverse is often the case.
vc The direction of the force at A couldbeeasily calculated if desired. However,in designing the pin A or in checkingits strength, it is only the magnitudeof the force that matters.
10 kN
25A0.5 m
0.25 m
0.12 m
5 m
1.5 m
B
va
vb
vc
4.66 kN10 kN
25
T
Ax
Ay
x
y
Free-Body Diagram
4.66 kN10 kN
14.66 kN
O
25T
A
Ax
Ay
14.66 kN
T = 19.61 kN
A = 18
.88 kN
Graphical Solution
PROBLEMS
Introductory Problems
3/1 The mass center G of the 1400-kg rear-engine car islocated as shown in the gure. Determine the normalforce under each tire when the car is in equilibrium.State any assumptions.
Ans. Nf 5 2820 N, Nr 5 4050 N
26 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_26 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/3 A carpenter holds a 12-lb 2-in. 3 4-in. board as shown.If he exerts vertical forces on the board, determine theforces at A and B.
Ans. NA 5 12 lb, NB 5 24 lb
G
1386 mm 964 mm
Problem 3/1
3/2 A carpenter carries a 12-lb 2-in. 3 4-in. board asshown. What downward force does he feel on his shoul-der at A?
5
A B
2 1
Problem 3/2
AB
62
Problem 3/3
3/4 The 450-kg uniform I-beam supports the load shown.Determine the reactions at the supports.
5.6 m
220 kg
A B
2.4 m
Problem 3/4
3/5 The 20-kg homogeneous smooth sphere rests on thetwo inclines as shown. Determine the contact forces atA and B.
Ans. NA 5 101.6 N, NB 5196.2 N
A
B75 30
Problem 3/5
Art ic le 3/3 Problems 27
p11 6191a_ch03 dm_27 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/6 With what force magnitude T must the person pull onthe cable in order to cause the scale A to read 500 lb?The weights of the pulleys and cables are negligible.State any assumptions.
A
1000 lb
Problem 3/6
3/7 What horizontal force P must a worker exert on therope to position the 50-kg crate directly over thetrailer?
Ans. P 5 126.6 N
4 m
2 m
1 m
Problem 3/7
3/8 The 600-lb drum is being hoisted by the lifting devicewhich hooks over the end lips of the drum. Determinethe tension T in each of the equal-length rods whichform the two U-shaped members of the device.
10
36
A
B
C
Problem 3/8
3/9 What fraction n of the weight W of a jet airplane is thenet thrust (nozzle thrust T minus air resistance R) inorder for the airplane to climb with a constant speedat an angle u with the horizontal?
Ans. n 5 sin u
T
R
q
Problem 3/9
3/10 Determine the force magnitude P required to lift oneend of the 250-kg crate with the lever dolly as shown.State any assumptions.
1500 mm
275 mm
250 kg
A
P
B
Problem 3/10
28 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_28 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/12 Determine the magnitude P of the vertical force re-quired to lift the wheelbarrow free of the ground atpoint B. The combined weight of the wheelbarrowand its load is 240 lb with center of gravity at G.
3/11 Find the angle of tilt u with the horizontal so that thecontact force at B will be one-half that at A for thesmooth cylinder.
Ans. u 5 18.437
A
45
q
45
B
Problem 3/11
24
A
CB
G
P
19 21 8
20
Problem 3/12
3/13 To facilitate shifting the position of a lifting hookwhen it is not under load, the sliding hanger shownis used. The projections at A and B engage theanges of a box beam when a load is supported, andthe hook projects through a horizontal slot in thebeam. Compute the forces at A and B when the hooksupports a 300-kg mass.
Ans. A 5 4.91 kN, B 5 1.962 kN
400mm
600mm B
A
300 kg
Problem 3/13
3/14 Three cables are joined at the junction ring C. Deter-mine the tensions in cables AC and BC caused by theweight of the 30-kg cylinder.
15
45
30 30 kg
A
B
CD
Problem 3/14
Art ic le 3/3 Problems 29
p11 6191a_ch03 dm_29 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/16 The uniform beam has a mass of 50 kg per meter oflength. Compute the reactions at the support O. Theforce loads shown lie in a vertical plane.
3/15 The 100-kg wheel rests on a rough surface and bearsagainst the roller A when the couple M is applied. IfM 5 60 N z m and the wheel does not slip, computethe reaction on the roller A.
Ans. FA 5 231 N
30
300 mm
C
AM
Problem 3/15
30
AO
BC3 kN
1.4 kN
4 kNm
1.8 m0.6 m
0.6 m
0.6 m
Problem 3/16
3/17 To accommodate the rise and fall of the tide, a walk-way from a pier to a oat is supported by two rollersas shown. If the mass center of the 300-kg walkwayis at G, calculate the tension T in the horizontal cablewhich is attached to the cleat and nd the force underthe roller at A.
Ans. T 5 850 N, A 5 1472 N
G
30
B
T
A
4 m
4 m
Problem 3/17
Representative Problems
3/18 Determine the magnitude P of the force which theman must exert perpendicular to the handle of thehigh-pressure washer in order to cause loss of contactat the front support B. Note that the operator pre-vents movement of the wheel with his left foot. The60-kg machine has its mass center at point G. Treatthe problem as two-dimensional.
30 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_30 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/20 The uniform 15-m pole has a mass of 150 kg and issupported by its smooth ends against the verticalwalls and by the tension T in the vertical cable. Com-pute the reactions at A and B.
310mm
30
125mm
800 mm
B
A
G
O
P
Problem 3/18
3/19 If the screw B of the wood clamp is tightened so thatthe two blocks are under a compression of 500 N, de-termine the force in screw A. (Note: The force sup-ported by each screw may be taken in the directionof the screw.)
Ans. A 5 1250 N
100 mm150 mm
A B
Problem 3/19
A
B
5 m
10 m
12 m
T
Problem 3/20
3/21 Determine the force P required to begin rolling theuniform cylinder of mass m over the obstruction ofheight h.
Ans. P 52mg!2rh 2 h
r 2 h
rP
h
Problem 3/21
3/22 The elements of a heavy-duty uid valve are shownin the gure. When the member OB rotates clockwiseabout the xed pivot O under the action of the forceP, the element S slides freely upward in its slot, re-leasing the ow. If an internal torsional spring exertsa moment M 5 20 N z m as shown, determine theforce P required to open the valve. Neglect allfriction.
Art ic le 3/3 Problems 31
p11 6191a_ch03 dm_31 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/24 A block placed under the head of the claw hammeras shown greatly facilitates the extraction of the nail.If a 50-lb pull on the handle is required to pull thenail, calculate the tension T in the nail and the mag-nitude A of the force exerted by the hammer head onthe block. The contacting surfaces at A are suf-ciently rough to prevent slipping.
180 mm
PM
B
O
A
S
Problem 3/22
3/23 The spring of modulus k 5 3.5 kN/m is stretched10 mm when the disk center O is in the leftmost po-sition x 5 0. Determine the tension T required to po-sition the disk center at x 5 150 mm. At that position,what force N is exerted on the horizontal slottedguide? The mass of the disk is 3 kg.
Ans. T 5 328 N, N 5 203 N (up)
x
O
T
45
k = 3.5 kN/m
Problem 3/23
50 lb
8"
2"
1 A
20
34
Problem 3/24
3/25 The indicated location of the center of gravity of the3600-lb pickup truck is for the unladen condition. Ifa load whose center of gravity is x 5 16 in. behindthe rear axle is added to the truck, determine theload weight WL for which the normal forces under thefront and rear wheels are equal.
Ans. WL 5 550 lb
45 67 x
BA
GG
WL
Problem 3/25
3/26 To test the validity of aerodynamic assumptionsmade in the design of the aircraft, its model is beingtested in a wind tunnel. The support bracket is con-nected to a force and moment balance, which is ze-roed when there is no airow. Under test conditions,the lift L, drag D, and pitching moment MG act asshown. The force balance records the lift, drag, anda moment MP. Determine MG in terms of L, D, andMP.
32 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_32 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/28 A person is performing slow arm curls with a 20-lbweight as indicated in the gure. The brachialis mus-cle group (consisting of the biceps and brachialismuscles) is the major factor in this exercise. Deter-mine the magnitude F of the brachialis-muscle-groupforce and the magnitude E of the elbow joint reactionat point E for the forearm position shown in the g-ure. Take the dimensions shown to locate the effec-tive points of application of the two muscle groups;these points are 8 in. directly above E and 2 in. di-rectly to the right of E. Include the 3.2-lb forearmweight which acts at point G. State any assumptions.
d
h
Airflow
P
L
G
DMG
Problem 3/26
3/27 In a procedure to evaluate the strength of the tricepsmuscle, a person pushes down on a load cell with thepalm of his hand as indicated in the gure. If theload-cell reading is 35 lb, determine the vertical ten-sile force F generated by the triceps muscle. Thelower arm weighs 3.2 lb with mass center at G. Stateany assumptions.
Ans. F 5 401 lb
61
6
G
UlnaHand
Load cell
O
HumerusTriceps
Problem 3/27
EG
24
14
8
HumerusBicepsBrachialis
UlnaRadius 20 lb
Problem 3/28
3/29 A woman is holding an 8-lb weight in her hand withthe entire arm held horizontally as shown in the g-ure. A tensile force in the deltoid muscle prevents thearm from rotating about the shoulder joint O; thisforce acts at the 217 angle shown. Determine the forceexerted by the deltoid muscle on the upper arm at Aand the x- and y-components of the force reaction atthe shoulder joint O. The weight of the upper arm isWU 5 4.1 lb, the weight of the lower arm is WL 5 2.4lb, and the weight of the hand is WH 5 0.9 lb; all theseweights act at the locations shown in the gure.
Ans. FD 5 160.2 lb, Ox 5 149.5 lb, Oy 5 242.2 lb
Art ic le 3/3 Problems 33
p11 6191a_ch03 dm_33 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/30 With his weight W equally distributed on both feet,a man begins to slowly rise from a squatting positionas indicated in the gure. Determine the tensile forceF in the patellar tendon and the magnitude of theforce reaction at point O, which is the contact areabetween the tibia and the femur. Note that the lineof action of the patellar tendon force is along its mid-line. Neglect the weight of the lower leg.
y
x
5
Deltoid muscle
21
8 lb
WU
O
FD
A
WL WH5.2
16.525.4
Problem 3/29
2
9
FemurFibula
TibiaPatella
Patellartendon
Quadriceps muscle
O
40
55
Problem 3/30
3/31 For the design of the belt-tensioning device, deter-mine the dimension l if the mass m maintains a spec-ied tension T in the belt for the position shown.Neglect the mass of the arm and central pulley com-pared with m. Also determine the magnitude R of theforce supported by the pin at O.
Ans. l 5 , R 5Tb!3 2 2 2!3T 1 m g
mg
34 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_34 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/33 The exercise machine is designed with a lightweightcart which is mounted on small rollers so that it isfree to move along the inclined ramp. Two cables areattached to the cartone for each hand. If the handsare together so that the cables are parallel and if eachcable lies essentially in a vertical plane, determinethe force P which each hand must exert on its cablein order to maintain an equilibrium position. Themass of the person is 70 kg, the ramp angle u is 157,and the angle b is 187. In addition, calculate the forceR which the ramp exerts on the cart.
Ans. P 5 45.5 N, R 5 691 NT
T
l
30b
O
G
m
30
Problem 3/31
3/32 The uniform 18-kg bar OA is held in the positionshown by the smooth pin at O and the cable AB. De-termine the tension T in the cable and the magnitudeand direction of the external pin reaction at O.
B O
A
1.5 m
60
1.2 m
Problem 3/32
b
q
Problem 3/33
3/34 Calculate the magnitude of the force supported bythe pin at C under the action of the 900-N load ap-plied to the bracket. Neglect friction in the slot.
3045
B C
A15
900 N
75 mm 150 mm
Problem 3/34
3/35 A uniform ring of mass m and radius r carries aneccentric mass m0 at a radius b and is in an equilib-rium position on the incline, which makes an anglea with the horizontal. If the contacting surfaces arerough enough to prevent slipping, write the expres-sion for the angle u which denes the equilibriumposition.
Ans. u 5 sin21r m
1 1 sin aF S D Gb m0
Art ic le 3/3 Problems 35
p11 6191a_ch03 dm_35 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
a
q
m
r
Ob m0
Problem 3/35
3/36 The concrete hopper and its load have a combinedmass of 4 metric tons (1 metric ton equals 1000 kg)with mass center at G and is being elevated at con-stant velocity along its vertical guide by the cabletension T. The design calls for two sets of guide roll-ers at A, one on each side of the hopper, and two setsat B. Determine the force supported by each of thetwo pins at A and by each of the two pins at B.
T
10
600 mm
300 mm
400 mm
C
G
A
B
Problem 3/36
3/37 During an engine test on the ground, a propellerthrust T 5 3000 N is generated on the 1800-kg air-plane with mass center at G. The main wheels at Bare locked and do not skid; the small tail wheel at Ahas no brake. Compute the percent change n in thenormal forces at A and B as compared with their ``en-gine-off'' values.
Ans. nA 5 232.6%, nB 5 2.28%
4 m
1.4 m
12
T
G
BA 0.8m
Problem 3/37
3/38 The elements of a wall-mounted swing-away stoolare shown in the gure. The hinge pin P ts looselythrough the frame tube, and the frame tube has aslight clearance between the supports A and B. De-termine the reactions on the frame tube at A and Bassociated with the weight L of an 80-kg person. Also,calculate the changes in the horizontal reactions atC and D due to the same load L. State anyassumptions.
350 mm
65 mm
CP
L
A
B
D
175 mm
65 mm
85 mm
Problem 3/38
36 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_36 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/40 In sailing at a constant speed with the wind, the sail-boat is driven by a 1000-lb force against its mainsailand a 400-lb force against its staysail as shown. Thetotal resistance due to uid friction through the wa-ter is the force R. Determine the resultant of the lat-eral forces perpendicular to motion applied to thehull by the water.
3/39 The hook wrench or pin spanner is used to turnshafts and collars. If a moment of 80 N z m is requiredto turn the 200-mm-diameter collar about its centerO under the action of the applied force P, determinethe contact force R on the smooth surface at A. En-gagement of the pin at B may be considered to occurat the periphery of the collar.
Ans. R 5 1047 N
375 mmA
PB
O
120100mm
Problem 3/39
5
10
R
400 lb
1000 lb
Wind
Problem 3/40
3/41 A portion of the shifter mechanism for a manual cartransmission is shown in the gure. For the 4-lb forceexerted on the shift knob, determine the correspond-ing force P exerted by the shift link BC on the trans-mission (not shown). Neglect friction in theball-and-socket joint at O, in the joint at B, and inthe slip tube near support D. Note that a soft rubberbushing at D allows the slip tube to self-align withlink BC.
Ans. P 5 13.14 lb
7.5"
4 lb
5
15 Slip tube
A
B
O
D
C P3"
1"
1"
Problem 3/41
3/42 A torque (moment) of 24 N z m is required to turn thebolt about its axis. Determine P and the forces be-tween the smooth hardened jaws of the wrench andthe corners A and B of the hexagonal head. Assumethat the wrench ts easily on the bolt so that contactis made at corners A and B only.
AB14 mm
120 mm
P
Problem 3/42
Art ic le 3/3 Problems 37
p11 6191a_ch03 dm_37 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/44 Determine the external reactions at A and F for theroof truss loaded as shown. The vertical loads rep-resent the effect of the supported roong materials,while the 400-N force represents a wind load.
3/43 The car complete with driver weighs 1700 lb andwithout the two airfoils has a 50%50% frontrearweight distribution at a certain speed at which thereis no lift on the car. It is estimated that at this speedeach of the airfoils A1 and A2 will generate 400 lb ofdownward force L and 50 lb of drag force D on thecar. Specify the vertical reactions NA and NB underthe two pairs of wheels at that speed when the air-foils are added. Assume that the addition of the air-foils does not affect the drag and zero-lift conditionsof the car body itself and that the engine has suf-cient power for equilibrium at that speed. The weightof the airfoils may be neglected.
Ans. NA 5 1201 lb (48.0%), NB 5 1299 lb (52.0%)
5"
32"120"A
A2
A1
B
D
L
Detail
Air flow
12"
38"
Problem 3/43
250 N
500 N
x
y
AG
F
B
C
D
E250 N
60
60
30 30 30
400 N
500 N
500 N
10 m
Problem 3/44
3/45 Calculate the normal forces associated with the frontand rear wheel pairs of the 1600-kg front-wheel-drivevan. Then repeat the calculations when the van(a) climbs a 10-percent grade and (b) descends a 10-percent grade, both at constant speed. Compute thepercent changes nA and nB in the normal forces com-pared with the nominal values. Be sure to recognizethat propulsive and braking forces are present forcases (a) and (b).
Ans. NA 5 9420 N, NB 5 6280 N(a) N 5 9030 N (24.14%), N 5 6590 N (14.98%)A B(b) N 5 9710 N (13.15%), N 5 5900 N (25.97%)A B
1200 mm 1800 mm
A
G
B
660 mm
Problem 3/45
3/46 It is desired that a person be able to begin closing thevan hatch from the open position shown with a 10-lbvertical force P. As a design exercise, determine thenecessary force in each of the two hydraulic strutsAB. The mass center of the 90-lb door is 1.5 in. di-rectly below point A. Treat the problem as two-dimensional.
45
22
Hinge axis
724
Strut detail
30A
A
O
O
B
B
P
Problem 3/46
38 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_38 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/48 The small crane is mounted on one side of the bed ofa pickup truck. For the position u 5 407, determinethe magnitude of the force supported by the pin at Oand the oil pressure p against the 50-mm-diameterpiston of the hydraulic cylinder BC.
3/47 The man pushes the lawn mower at a steady speedwith a force P that is parallel to the incline. The massof the mower with attached grass bag is 50 kg withmass center at G. If u 5 157, determine the normalforces NB and NC under each pair of wheels B and C.Neglect friction. Compare with the normal forces forthe conditions of u 5 0 and P 5 0.
Ans. NB 5 214 N, NC 5 260 NWith u 5 P 5 0: NB 5 350 N, NC 5 140.1 N
q
900mm
1000mm
200mm
500mm
215 mmP
A
G
C
B
Problem 3/47
B
C
A
q
785mm
340mm
360mm
110mm
O120 kg
Problem 3/48
3/49 The pin A, which connects the 200-kg steel beam withcenter of gravity at G to the vertical column, iswelded both to the beam and to the column. To testthe weld, the 80-kg man loads the beam by exertinga 300-N force on the rope which passes through a holein the beam as shown. Calculate the torque (couple)M supported by the pin.
Ans. M 5 4.94 kN z m
GA
1200 mm 600mm
300 mm
Weldedpin
Problem 3/49
3/50 The cargo door for an airplane of circular fuselagesection consists of the uniform semicircular cowlingAB of mass m. Determine the compression C in thehorizontal strut at B to hold the door open in the po-sition shown. Also nd an expression for the totalforce supported by the hinge at A. (Consult Table D/3of Appendix D for the position of the centroid or masscenter of the cowling.)
Light strut
Closed position of B
Horiz.
A
B
r
Problem 3/50
Art ic le 3/3 Problems 39
p11 6191a_ch03 dm_39 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/52 The rubber-tired tractor shown has a mass of 13.5Mg with center of mass at G and is used for pushingor pulling heavy loads. Determine the load P whichthe tractor can pull at a constant speed of 5 km/h upthe 15-percent grade if the driving force exertedby the ground on each of its four wheels is 80 percentof the normal force under that wheel. Also nd thetotal normal reaction NB under the rear pair ofwheels at B.
3/51 The cargo door for an airplane of circular fuselagesection consists of the uniform quarter-circular seg-ment AB of mass m. A detent in the hinge at A holdsthe door open in the position shown. Determine themoment exerted by the hinge on the door.
Ans. MA 5 0.709mgr CCW
Closed position of B
Horiz. A30
B
r
Problem 3/51
A
1650 mm
P15100 1800 mm 1800 mm
B600 mm
600 mm
G
Problem 3/52
3/53 Pulley A delivers a steady torque (moment) of 900 lb-in. to a pump through its shaft at C. The tension inthe lower side of the belt is 150 lb. The driving motorB weighs 200 lb and rotates clockwise. As a designconsideration, determine the magnitude R of theforce on the supporting pin at O.
Ans. R 5 287 lb
150 lb
30
3"
O
B
A
8
5 5
C 9"
Problem 3/53
3/54 The receiving unit for a wireless microphone system,exclusive of the antenna, has a mass of 1100 gramswith mass center at G. A single 375-g half-wave an-tenna with mass center at C is mounted to the re-ceiver at point O as shown. Plot the reaction forcesat A and B and their sum as functions of the antennaangle u over the range 0 # u # 907. Physically in-terpret your plot. Treat the problem as two-dimensional.
q
30mm
75mm
45mm 250mm
750mm
60mm
15mm
30mm
C
D
OG
A B
Problem 3/54
40 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_40 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
3/56 When setting the anchor so that it will dig into thesandy bottom, the engine of the 80,000-lb cruiserwith center of gravity at G is run in reverse to pro-duce a horizontal thrust T of 500 lb. If the anchorchain makes an angle of 607 with the horizontal, de-termine the forward shift b of the center of buoyancyfrom its position when the boat is oating free. Thecenter of buoyancy is the point through which theresultant of the buoyant forces passes.
3/55 A slender rod of mass m1 is welded to the horizontaledge of a uniform semicylindrical shell of mass m2.Determine an expression for the angle u with the hor-izontal made by the diameter of the shell through m1.(Consult Table D/3 in Appendix D to locate the centerof gravity of the semicircular section.)
Ans. u 5 tan21pm12m2
m2r m1
q
Problem 3/55
3
24
G
T
660
Problem 3/56
1800
mm
O
30
60
A
B
700mm
Problem 3/57
3/57 The uniform 400-kg drum is mounted on a line ofrollers at A and a line of rollers at B. An 80-kg manmoves slowly a distance of 700 mm from the verticalcenterline before the drum begins to rotate. All roll-ers are perfectly free to rotate, except one of them atB which must overcome appreciable friction in itsbearing. Calculate the friction force F exerted by thatone roller tangent to the drum and nd the magni-tude R of the force exerted by all rollers at A on thedrum for this condition.
Ans. F 5 305 N, R 5 3770 N
3/58 The pipe bender consists of two grooved pulleysmounted and free to turn on a xed frame. The pipeis bent into the shape shown by a force P 5 60 lb.Calculate the forces supported by the bearings of thepulleys.
20"
1.050"
P
BA
6"
1"
13/4"
Problem 3/58
FG1
Sacrum
L3L4L5
G2
L
Wu
50 mm300 mm
41
25 mm
Problem 3/60
Art ic le 3/3 Problems 41
p11 6191a_ch03 dm_41 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
c 3/60 The lumbar portion of the human spine supports theentire weight of the upper torso and the force loadimposed on it. We consider here the disk (shaded red)between the lowest vertebra of the lumbar region(L5) and the uppermost vertebra of the sacrum re-gion. (a) For the case L 5 0, determine the compres-sive force C and the shear force S supported by thisdisk in terms of the body weight W. The weight Wuof the upper torso (above the disk in question) is 68%of the total body weight W and acts at G1. The ver-tical force F which the rectus muscles of the backexert on the upper torso acts as shown in the gure.(b) Repeat for the case when the person holds aweight of magnitude L 5 W/3 as shown. State anyassumptions.
Ans. (a) C 5 0.795W, S 5 0.636W(b) C 5 2.45W, S 5 1.532W
c 3/59 A special jig is designed to position large concretepipe sections (shown in gray) and consists of an 80-Mg sector mounted on a line of rollers at A and a lineof rollers at B. One of the rollers at B is a gear whichmeshes with a ring of gear teeth on the sector so asto turn the sector about its geometric center O. Whena 5 0, a counterclockwise torque of 2460 N z m mustbe applied to the gear at B to keep the assembly fromrotating. When a 5 307, a clockwise torque of 4680N z m is required to prevent rotation. Locate the masscenter G of the jig by calculating and u. Note thatrthe mass center of the pipe section is at O.
Ans. 5 367 mm, u 5 79.87r
q
a
Horiz O
G
r
A B
5 m
Dia. = 480 mm
Problem 3/59
42 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_42 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
S E C T I O N B E Q U I L I B R I U M I N T H R E E D I M E N S I O N S
3/4 EQUILIBRIUM CONDITIONSWe now extend our principles and methods developed for two-
dimensional equilibrium to the case of three-dimensional equilib-rium. In Art. 3/1 the general conditions for the equilibrium of abody were stated in Eqs. 3/1, which require that the resultantforce and resultant couple on a body in equilibrium be zero. Thesetwo vector equations of equilibrium and their scalar componentsmay be written as
oF 5 0xoF 5 0 or oF 5 0y5
oF 5 0z (3/3)oM 5 0x
oM 5 0 or oM 5 0y5oM 5 0z
The rst three scalar equations state that there is no resultantforce acting on a body in equilibrium in any of the three coordi-nate directions. The second three scalar equations express thefurther equilibrium requirement that there be no resultant mo-ment acting on the body about any of the coordinate axes or aboutaxes parallel to the coordinate axes. These six equations are bothnecessary and sufcient conditions for complete equilibrium. Thereference axes may be chosen arbitrarily as a matter of conve-nience, the only restriction being that a right-handed coordinatesystem should be chosen when vector notation is used.
The six scalar relationships of Eqs. 3/3 are independent con-ditions because any of them can be valid without the others. Forexample, for a car which accelerates on a straight and level roadin the x-direction, Newton's second law tells us that the resultantforce on the car equals its mass times its acceleration. Thus,oFx 0, but the remaining two forceequilibrium equations aresatised because all other acceleration components are zero. Sim-ilarly, if the ywheel of the engine of the accelerating car is ro-tating with increasing angular speed about the x-axis, it is not inrotational equilibrium about this axis. Thus, for the ywheelalone, oMx 0 along with oFx 0, but the remaining four equi-librium equations for the ywheel would be satised for its mass-center axes.
In applying the vector form of Eqs. 3/3, we rst express eachof the forces in terms of the coordinate unit vectors i, j, and k.For the rst equation, oF 5 0, the vector sum will be zero onlyif the coefcients of i, j, and k in the expression are, respectively,zero. These three sums, when each is set equal to zero, yield pre-
cisely the three scalar equations of equilibrium, oFx 5 0, oFy 50, and oFz 5 0.
For the second equation, oM 5 0, where the moment summay be taken about any convenient point O, we express the mo-ment of each force as the cross product r 3 F, where r is theposition vector from O to any point on the line of action of theforce F. Thus oM 5 o(r 3 F) 5 0. When the coefcients of i, j,and k in the resulting moment equation are set equal to zero,respectively, we obtain the three scalar moment equationsoMx 5 0, oMy 5 0, and oMz 5 0.
Free-Body Diagrams
The summations in Eqs. 3/3 include the effects of all forceson the body under consideration. We learned in the previous ar-ticle that the free-body diagram is the only reliable method fordisclosing all forces and moments which should be included inour equilibrium equations. In three dimensions the free-bodydiagram serves the same essential purpose as it does in two di-mensions and should always be drawn. We have our choice eitherof drawing a pictorial view of the isolated body with all externalforces represented or of drawing the orthogonal projections of thefree-body diagram. Both representations are illustrated in thesample problems at the end of this article.
The correct representation of forces on the free-body diagramrequires a knowledge of the characteristics of contacting surfaces.These characteristics were described in Fig. 3/1 for two-dimen-sional problems, and their extension to three-dimensional prob-lems is represented in Fig. 3/8 for the most common situations offorce transmission. The representations in both Figs. 3/1 and 3/8will be used in three-dimensional analysis.
The essential purpose of the free-body diagram is to developa reliable picture of the physical action of all forces (and couplesif any) acting on a body. So it is helpful to represent the forces intheir correct physical sense whenever possible. In this way, thefree-body diagram becomes a closer model to the actual physicalproblem than it would be if the forces were arbitrarily assignedor always assigned in the same mathematical sense as that of theassigned coordinate axis.
For example, in part 4 of Fig. 3/8, the correct sense of theunknowns Rx and Ry may be known or perceived to be in the senseopposite to those of the assigned coordinate axes. Similar condi-tions apply to the sense of couple vectors, parts 5 and 6, wheretheir sense by the right-hand rule may be assigned opposite tothat of the respective coordinate direction. By this time, youshould recognize that a negative answer for an unknown force orcouple vector merely indicates that its physical action is in thesense opposite to that assigned on the free-body diagram. Fre-quently, of course, the correct physical sense is not known ini-tially, so that an arbitrary assignment on the free-body diagrambecomes necessary.
Art ic le 3/4 Equi l ibr ium Condi t ions 43
p11 6191a_ch03 dm_43 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
44 Chapter 3 Equi l ibr ium
p11 6191a_ch03 dm_44 Tuesday Mar 13 2001 02:21 PM UG Job number: 6191aPublisher: Wiley Author: Meriam Title: Engineering Statics, 5/e tmm
M O D E L I N