Embed Size (px)
Citation preview

平成 31 年度/令和元年度
課題研究要旨集
Abstracts
"Project Study" 2019
情報システム分野
(情報・コンピュータサイエンス分野)
Information Systems Course
東京工業大学附属科学技術高等学校 科学・技術科
Tokyo Tech High School of Science and Technology
The Department of Science and Technology
目 次
STEM 課題研究
1. 音響変換器による音波・音質の解析および応用研究 ······························· 1
2. ブロックチェーンを用いた電子カルテ共有システムの開発 ·························· 3
3. 音声認識と画像処理を用いた自動板書ノート作成システムの開発 ··············· 5
4. 画像認識を用いた 3D 人体モデル生成システムの開発 ···························· 7
5. AI と脳科学に基づく学習アプリケーションの開発 ··································· 9
SGH 課題研究
6. モーションキャプチャ・筋電センサを用いた運動フォームの改善 ··················· 11
7. 減少する労働力を補填するための自動運搬車の研究 ······························ 13
8. 非言語表現を用いた外国人観光者向け AR マップアプリケーションの提案 ····· 15
次ページからの著者について
* 情報・コンピュータサイエンス分野 生徒
** 情報・コンピュータサイエンス分野 指導教員

- 1 -
音響変換器による音波・音質の解析および応用研究
Analytical and Application of Quality and Sonic by Sound Changer
穴口 宙輝*,板垣 彩叡*,國重 和*,都留 裕貴**
1 背景・目的
音響変換器とは音の性質を変える機器のことで
ある。一般的に,音とは様々な方向に拡散する,
無指向性と呼ばれる性質を持ったものである。そ
のため私たちがコントロールするのは困難である。
そこで本研究は,音響変換器を用いて,音の性質
を用途に応じて使い分けることができるシステム
の開発を目的として研究・作成を行った。
2 概要
2.1 音響変換器について
本研究は今回一方向にのみ音を伝えやすくする,
つまり高い指向性をもつ音波を出力できるパラメ
トリックスピーカーについて研究を行った。まず,
パラメトリックスピーカーの仕組み及び指向性が
高まる要因を調べるために回路構造の把握,加え
て実際にスピーカーを用いた実験・調査を行った。
まず,音の性質の中に周波数が高まるほど,指向
性も高まるというものがある。特に,超音波の範
囲であると可聴角度が体感できるほどに鋭くなる。
しかし,一般的
なスピーカー
では超音波を
出す用途には
不向きである。
それに比べ,パ
ラメトリック
スピーカーに
使用される超
音波発振子は,
超音波の出力
に特化した素
子である。超音
波発振子を動作させるためには,素子が受け取る
データが素子に対応した高周波であること,また
デジタルな波形であることが必要である。そのた
めに,方形波生成回路,方形波変形回路,周波数
変調回路を用いて,対応した高周波のデジタルな
波形を作っている。具体的には,方形波生成回路
で一定周期の高周波の方形波を出力し,方形波変
形回路でその方形波を三角波に変形している。そ
して,周波数変調回路で三角波と元の音源のアナ
ログな波形データを比較することで,超音波発振
子に合ったデジタル波形である,PWM 波を出力
できる。この PWM 波を超音波発振子がアナログ
に変換すると,図2のように内側は高周波,外形
が元の音である,超音波の性質を保ちつつ人の耳
は元の音だと認識する波形となる。
2.2 応用研究について
実験・調査結果から, パラメトリックスピーカ
ーの仕組み及び指向性が高まる要因が判明した。
方形波生成回路でタイマーIC を利用していたが,
タイマーIC が対応する方形波の数値に正しく調
整されているかが確認できない。そのため,PIC
等を用いた周波数確認回路が必要であった。応用
研究では,周波数確認回路を省略できないかと考
え,方形波生成回路の部分を,Arduino を用いて
互換を行った。また,指向性を生かすシステムの
開発として,方向を任意に設定し,ある一定範囲
のみに音を流す機能を追加した。
3 方法
3.1 Arduino による互換
図 3 に示している,周波数発振回路と周波数確
認回路を互換した。発振周波数変調回路では入力
された音源の音を 40[kHz]のパルス波に変調して
いる。この周波数の基準を周波数発振回路から出
力している。互換前はタイマーIC によって周波数
を安定化させているが, 初動時にコンデンサの容
量と抵抗値によって周波数が変化してしまう。そ
こで,Arduino を用いることで PIC をはじめとし
た図 1 における周波数確認回路を省略することが
図 2 超音波が聞こえる仕組み
方形波変形回路
音源
周波数確認回路
周波数変調回路
超音波発振子
図 1 内部構造の概要
方形波生成回路

情報・コンピュータサイエンス分野
- 2 -
できる。
3.2 システムの開発
可聴範囲の設定のために,スピーカーにサーボ
モーターを設置し,その動力でスピーカーを回転
するプログラムを,同じく Arduino を用いて作成
した。空気中での音の伝導を用いて離れた地点へ
音を届けるには,聞かせる対象にスピーカーを正
面に当て届ける方法と,壁などに反射させて何も
ないところから疑似的に音を届けるという 2 つの
方法が挙げられる。この後者の方法は,高い指向
性を生かした方法である。一般的に音は反射の際
に乱反射で拡散してしまう。しかし高い指向性を
持った音は直進性が高いため,壁に当たった音は,
光と同じく入射角と反射角が等しくなるように,
全反射する。このようにして壁に音源があるよう
に聞こえることができる。これを仮想音源という。
しかし,完全に乱反射を防ぐことは難しく,前者
の正面から音を届けるシステムのみ完成となった。
このシステムでは,スピーカーの初期位置を設定
し,そこから何度回転させるかをシリアルポート
に入力することで,Arduino での計算や処理を通
じ,モーターに回転角の情報を送信して動作させ
ている。Arduino で処理を行う場合,通常は char
型の文字列でやり取りを行うが,このままではデ
ータを数値として扱うことができないため,char
型から int 型に変換する処理を行っている。
4 結果と考察
4.1 互換に関して
発振周波数増幅回路の互換は,ほぼ 40[kHz]の
パルス波の生成に
成功し互換するこ
とができた。(図 3)
またこれにより,
40[kHz]を安定して
出力できるため,周
波数確認回路を省
略でき,回路を簡略
化することができ
た。
4.2 応用研究に関して
作成したシステムの実機調査を行った結果,一
般的な教室(7×9m)でも,遮蔽空間を除き,指定さ
れたどの位置にも,指向性をもつ音を届けること
ができた。また任意の角度の入力を行い,音を壁
に反射させ仮想音源を作成し,指定場所で本来の
音と同様の音を観測することに成功した。(図 4)
しかし,反射音の実測を行う際,予想以上に乱反
射が起こり,意図しない場所でも小さく音が聞こ
えてしまうことがあった。これはスピーカーから
観測者までの距離が大きい場合に著しく見られた
ため,長距離を挟むと音圧が低下するように,指
向性も低下しているのではないかと考えた。
5 今後の課題
今回,Arduino などを用いて実際に音響変換器
の機能を理解し回路の一部互換に成功することが
できたため,ほかの回路部分も互換や簡略化,多
機能化することが可能であると考える。また応用
研究に関しては,手動で入力しているシステムを,
画像認識を用いることで自動化,また音を届ける
地点,仮想音源,音源の位置を任意に設定できる
システムを追加することで汎用性を上げられると
考える。これを改良することで,その場の雰囲気
を重要とする美術館,博物館などでの展示物に仮
想音源を用いて説明を行ったり,危険場所での注
意喚起を行ったり,次世代の AR 技術と併合し,
誘導やポスターなど,日常生活に幅広く活躍でき
ると期待される。
参考文献
(1) TriState:TriState-トライステート, 入手先 〈 http://www. Tristate.ne.jp/index.html 〉 [ 参 照 2019/06/06]
(2) TEXAS INSTRUMENTS: NA555, NE555, SA555, SE555 Precision Timers datasheet (Rev. I), available from〈http://www.ti.com/jp/lit/ds/symlink/ne555.pdf〉[accessed 2019/06/06]
(3) TEXASINSTRUMENTS: LMC662 CMOS Dual Operational Amplifier, available from〈http://www.tij.co.jp/jp/lit/ds/jajsbe5/jajsbe5.pdf〉[accessed 2019/06/06]
(4) 積分回路, 入手先〈 http://www.nteku.com/opamp/opamp-integral.aspx〉[参照 2019/09/26]
図 4 実験の様子
図 3 Arduino による
発振回路の互換

- 3 -
ブロックチェーンを用いた電子カルテ共有システムの開発
Development of Electronic Medical Record Sharing System Using Blockchain
小越 皆理*,小澤 勇和*,佐々木 駿*,永峯 歩夢*,花見 祐人*,石川 幸治**
1 背景・目的
この研究の発端はブロックチェーンである。ブ
ロックチェーンはビットコインなどの暗号通貨に
用いられるデータベースで,理論上一度保存する
と書き換えることができない。この技術を新たな
分野で応用することが研究の目的である。そこで
日本の医療分野が挙げられる。
現在,日本の医療は少子化に伴う医療従事者の
人材不足が深刻な状況にある(1)。私たちは労働環
境を効率化することで,その負担を軽減したいと
考えている。その手法の一つがカルテの電子化で
ある。多くの病院が業務の効率化を狙い,電子カ
ルテの導入を進めている(1)。その一方で,病院間
での電子カルテを共有するシステムの導入はでき
ていない。これが導入されることで,患者の情報
を医師が的確に素早く知ることができる。
電子カルテを共有するに際して,セキュリティ
が担保されていないことによる情報の改ざんや流
出が危険視されている。これを解決する手立てと
して考えられるのがブロックチェーンである。
2 概要
2.1 アプリケーション
今回はプログラミング言語 C#を用いて,疑似的
な電子カルテ(診療録)を作成した。電子カルテ
の内容としては患者のいくつかの情報(性別・年
齢などの基本ステータス,病状,来院日など)を
盛り込み,visual studio 内で C#を用いてこれら
の項目を見やすく配置した。図 1 にその外観を示
す。
また,それらの情報をテキストファイルとして
保存する。このテキストファイルをブロックチェ
ーンに載せて他端末に共有する。共有したテキス
トファイルをアプリケーションに反映することで
視覚的に共有されたことがわかる。この電子カル
テの作成はメインテーマのブロックチェーンの開
発とは異なるが,ブロックチェーンを用いて共有
されたことをアプリケーション上で視覚的に確認
できるという点ではこの開発に必要不可欠である。
2.2 暗号化
電子カルテを送受信する際の暗号化,復号には
ハイブリッド暗号方式を用いる。これは共通鍵暗
号方式と公開鍵暗号方式を組み合わせることで双
方の長所を得るものである。
今回は共通鍵暗号として,カウンタを暗号化し
て作った鍵ストリームと,電子カルテのデータを
数 byte ごとに分けて作ったブロックとで排他的
論理和をとったものが暗号文となる AES-CTR を
作成した。カウンタを暗号化する際に用いる共通
鍵には,取引ごとに変わる乱数を使用した。カウ
ンタは nonce とブロック番号からなるが,今回の
開発では簡易的に,共通鍵をハッシュ化したもの
を nonce に充てている。また,ここで扱うブロッ
クはブロックチェーンとは関係のないものである。
公開鍵暗号には楕円曲線暗号を用いる。秘密鍵
は取引ごとに変わる乱数とし,公開鍵はそれをも
とに楕円曲線上でスカラー倍をすることで作成で
きる。
2.3 ブロックチェーン
ブロックチェーンでは病院間で行われた電子カ
ルテのやり取りを保存している。ブロックチェー
ンはブロックというデータのまとまりをハッシュ
化し,そのハッシュ値を次に作られるブロックに
入れる。このとき,再度ブロックのハッシュ値を
計算し,次に作られたブロックに保存されたハッ
シュ値を比較することで中身が書き換えられてい
ないことを確認できる。この特性を用いてブロッ
クの羅列を伸ばしていき,各ノードでそれを確認図 1 アプリケーションの外観

情報・コンピュータサイエンス分野
- 4 -
しあうことで信用のできるブロックチェーンを作
成していく。このブロックチェーンを作成してい
くシステムを構築した。
2.4 ネットワーク
ネットワークではブロックチェーンの基盤であ
る P2P 通信システムを開発する。P2P 通信は分
散型の通信システムのことであり,相互に接続さ
れている peer 同士がそれぞれ通信したり,各自
でデータを保持したりするネットワークのことで
ある。P2P 通信の特徴として計算能力の高さ,コ
スト削減,信頼性の高さが挙げられる。これらの
特徴を用いて各病院の端末間でブロックを共有し,
最も長い信用のできるチェーンを伸ばしていくこ
とで改ざんを防ぎながら安全にカルテを共有する。
3 方法
二つの PC を病院 A と病院 B としたとき,病院
A から病院 B に電子カルテを送る場合を考えたと
きの流れを図 2 に示す。
図 2 のとき,B は A に欲しいカルテの情報と公
開鍵を送る。A はそれを基に共通鍵を用いて電子
カルテを暗号化し,共通鍵を公開鍵で暗号化する。
A は B にこの暗号化された電子カルテと共通鍵を
ブロックチェーンに載せる。B はこの情報を閲覧
し,秘密鍵で復号した共通鍵で電子カルテを復号
することで電子カルテを共有できる。
4 結果と考察
現在,ブロックチェーンを作成することができ
た。また,書き換えを発見できることを図 3 より
確認している。
3 番のブロックが改ざんされた後に,新たなブ
ロックの番号が 3 番になっている。これは改ざん
されたブロックを含むチェーンから分岐している
ということを表している。それにより,生成され
たブロックチェーンから改ざんを検知して作り直
すというブロックチェーンの根本的な機能は確認
することができた。
しかし,データをブラウザで表示したときに桁
数が大きいと指数関数表示になってしまい,差異
が生じてしまう。本来は暗号化したデータを送信
するので,差異が生じてしまうと復号することが
できない。Python では int 型の桁数制限がない
ため,ブロックチェーンのデータをそのままブラ
ウザで表示すると指数関数表示になってしまう。
よって,JavaScript 側の問題であると考えられ
る。しかし,JavaScript の int 型の制限をなく
す BigInt を利用したが,解消されなかった。
現在はネットワーク上でこの流れを確認するこ
とができている。そして,ブロックチェーン自体
の書き換えに対する検知や書き換えに対するネッ
トワーク全体の耐性を確認することができた。ま
た,今回の研究でブロックチェーンを新たな分野
へと応用できる可能性を見出すことができた。
5 今後の課題
結果と考察から各ノード上のブロックチェーン
が機能し,同期することを確認できた。送信者が
送った値を受信者が確認できるようにすることが
今後の課題である。
参考文献
(1) 厚生労働省:必要医師数実態調査,必要医師数実態調査詳細結果,入手先〈https://www.mhlw.go.jp/stf/seisakunitsuite/bunya/kenkou_iryou/iryou/hitsuyouishisuu/index.html〉[参照2019/06/13]
図 2 電子カルテ共有の流れ
図 3 ブロックチェーンの様子

- 5 -
音声認識と画像処理を用いた自動板書ノート作成システムの開発
Development of an Automatic Note Taking System
Using Speech Recognition and Image Processing 飯田 圭祐*,澤田 開杜*,篠﨑 拓実*,菅原 凜太郎*,當麻 僚太郎*,石川 幸治**
1 背景・目的
ノートテイキングの重要性は,多くの教育学系
の論文で言及されている(1)(2)(3)。ノートは学生だ
けでなく,授業者にも重宝されるものであり,板
書構成のメモとして用いられる場合がある。その
ような様々なノートの活用方法を踏まえ,私達は
ノートテイキングの自動化に注目した。ノートテ
イキングを自動化することにより,自動で作成し
たノートで授業ノートの補完や,授業の復習,授
業内容の見直しの資料などの新しい活用方法があ
ると考えた。
私達の考えた音声認識と画像処理を用いた自動
板書ノート作成システムでは,音声認識で授業者
の話を文字に起こし,画像処理で板書の写しを作
成する。最後にそれらを組み合わせて,ノートテ
イキングを自動的に行う。
詳しい流れを図 1 に示す(図 1)。始めに板書し
ている様子を撮影する。撮影したものをサーバに
渡し,動画を音声と画像に分割する。そして,音
声認識と画像処理行う。それらのデータを合成し,
JSON ファイルを作成する。JSON ファイルから
PDF を作成し,ノートにする。ノートは Google
社が運営する Firebase 上で管理し,ユーザは web
アプリを介してダウンロードや,ノートの閲覧を
行う。私達は,これらを画像処理,音声認識,サ
ーバ,ノート,web アプリの 5 つに分けて開発を
進めていくことにした。
2 概要
2.1 画像処理
授業ノートを作成する際に使用する板書画像を
作成する。まずは,一定時間間隔で撮影した画像
から黒板の位置と大きさを検出し,画像から黒板
のみを切り出す(4)。その後,授業者のだいたいの
位置と消去すべき横幅を検出する。検出した位置
と横幅より,画像の切り取りを行う。授業者の位
置を中央とし,消去すべき横幅と画像の縦幅が成
す領域をすべて切り取る。次に,切り取った画像
を合成し板書画像を作成する。1 枚目,2 枚目…と
順に切り取った画像を合成すると板書画像になる。
最後に,板書画像の選定を行う。板書画像から特
徴量を持つ特徴点を数え上げる。この数を板書量
とし,前後の板書量の変化率を算出する。この変
化率が負になるところを板書画像として採用する。
以上の操作により選定された板書画像をノート化
に使用する。
2.2 音声認識
音声認識では,ノイズ除去や音声分割などの音
声データの加工部分と,実際に音声データを認識
する部分の二つに分けられる。ノイズ除去は,音
声データをフーリエ変換し,高周波数帯域をカッ
トする。認識部分では,Google 社の Cloud Speech-
to-Text API を利用する。
2.3 サーバ
サーバ全体の流れとしては,ユーザがファイル
をアップロードする。サーバはアップロードされ
たことを検知すると動画を音声ファイルと画像フ
ァイルに分割する。なお画像は 100 秒ごとに抽出
する。画像処理と音声認識を行う。生成された画
像ファイルとテキストファイルから JSON ファ
イルを作成する。それをもとに,PDF ファイルを
作成する。に,Firebase にそのファイルをアップ
ロードする。
2.4 ノート
PHP のライブラリである TCPDF を使用し,
JSON データからの PDF 作成を行う。
画像処理により生成された板書画像を base64
にエンコードし,そのデータと音声認識したテキ
ストデータを持つ JSON ファイルを作成する。
図 1 システムの流れ

情報・コンピュータサイエンス分野
- 6 -
JSON ファイルに含まれた base64 の画像データ
をデコードし,元画像データを取得する。そして,
画像データとテキストデータを並べてブラウザ組
込の PDF 閲覧機能を使用して PDF を出力する。
2.5 Web アプリ
今回,生成されたノートを閲覧・ダウンロード
するためのサービスとして web アプリを作成し
た。これはログインページ,ユーザページ,授業
登録ページ,閲覧
ページ(図 2)から
なっており,フレ
ームワークには
Angular を,認証,
データベース,ス
トレージサービス
には Firebase を
使用している。
この web アプ
リでは Google アカウントによるユーザ認証を採
用している。これによりユーザを一意に識別でき
るため,ユーザが取っている授業を専用ページで
登録しておくことで,ユーザごとに異なるノート
の一覧ページを表示することができる。
3 方法
今回のシステムを評価するために画像処理,音
声認識,ノートについて実験を行った。出力した
文章と,人間が聞き取って作成した文章をレーベ
ンシュタイン距離で比較する。画像処理は,作成
した画像と先生がいない状態の板書を比較する。
ノートは,5 段階評価のアンケートを行い,有用
性について調べる。
4 結果・考察
4.1 音声認識精度の実験
授業の音声の一部を認識させたところ,最高で
も 69.4%の認識率に留まった。その原因として,
認識精度には録音環境や,授業者の発音の曖昧さ
が大きく影響すると考えられる。実際に,雑音が
多く,あいまいな発音である部分ほど認識精度が
低かった。
4.2 画像処理精度の実験
画像は 4 枚の板書画像に対して実験を行った。
画素値差を±5 まで許容すると 86.1%だった。完
全一致ではないが,人の目で確認する分にはそこ
まで影響のない程度に合成することができた。
4.3 ノートの有用性についてのアンケート
「ノートの見やすさ」の集計結果は,5 段階評
価中 2.7 だった。これは音声認識の精度の低さに
起因する。実際に,文章の自然さでは 1 が目立っ
ていた。次に,「このノートを使いたいと思うか」
と「勉強の復習として役に立つか」に注目する。
前者は後者に比べ,1 と 2 の割合が多く,後者は
2 と 4 の評価が目立つという結果になった。これ
より,ノートの内容は悪いが,勉強の復習として
の活用が期待できると考える(図 3)。
音声認識の精度の向上や,画像を見やすくする
工夫などの改善が必須である。
5 今後の課題
今後の課題として,音声認識精度の向上や,画
像のコントラスト調整などが考えられる。また,
「ノートを電子機器で確認できたらうれしいか」
というアンケートにおいて 4 と 5 の評価の割合が
高かった。そのため,web アプリの UI,UX 向上
が考えられる。そして,これらに対する実験も行
い,検証する必要がある。
本システム全体を改善していくことで,よりよ
いノートを作成することができ,多くのユーザに
活用されることが期待される。
参考文献
(1) 大坪 治彦, 東畑 貴昭:授業者の板書計画とノート指導に関する一考察 , 鹿児島大学教育学部研究紀要 . 教 育 科 学 編 , 63, p107-119, 入 手 先 < http://hdl.handle.net/10232/14114> [参照 2019/06/15]
(2) 中島 英博:多人数講義で学生の深い学習を促す教員の特質,名古屋高等教育研究第15号, 2015, p161-171,入手先https://ci.nii.ac.jp/naid/120005593394 [参照 2019/06/15]
(3) 岸 俊行,塚田 裕恵,野嶋 栄一郎:ノートテイキングの有無と事後テストの得点との関連分析, 日本教育工 学 会 論 文 誌 28,2004,p265-268, 入 手 先https://www.jstage.jst.go.jp/article/jjet/28/suppl/28_KJ00003730718/pdf/-char/ja[参照 2019/06/15]
(4) Raspberry Pi3で自動ノート取り装置を作った,いきるちから,入手先 http://dolicas.hatenablog.com/entry/2016/06/26/231848[参照 2019/09/18]
図 2 web アプリの様子
図 3 アンケート結果

- 7 -
画像認識を用いた 3D 人体モデル生成システムの開発
Development of 3D Human Body Model Creation System
Using Image Recognition 北村 一太郎*,酒井 一磨*,下田 壮人*,野村 英弐*,藤田 大河*,西澤 吉郎**
1 背景・目的
3D モデルは,物体をデータとして永久的に保
存し多方向からいつでも眺めることができたり,
3D プリントする際に必要とされたり,試作した
衣服や装飾品を仮想空間内で装着させて視覚的に
確認をしたりするなど,多数の使用用途があり,
私たちの生活に欠かせない存在となっている。
しかし,従来の 3D人体モデルの生成方法(1)は,
多方向から撮影した複数の写真を用いてモデルを
生成するものであり,個人では簡易なモデルであ
っても生成するのに時間やお金,手間がかかって
しまう。
そこで私たちは,1 枚の写真のみから 3D 人体
モデルの生成を行うシステムを開発することによ
り,誰にでもできる,より簡単なモデル生成の手
段を提供できると考えた。
2 概要
2.1 データ
画像の処理を行うソフトウェアとして,
OpenCV を使用する。 OpenCV(Open Source
Computer Vision Library)は,オープンソースの
コンピュータービジョンおよび機械学習ソフトウ
ェアライブラリ(2)のことである。これを用いて,
腕と肩の関節,ひざにシールを貼った画像を読み
込み,マスキングや輪郭の検出,座標の計算を行
い 3D モデル生成に必要なデータ(3)をそろえる。
2.2 モデリング
3D モデリングとは,3 次元のオブジェクトまた
は形状の数学的表現を,ソフトウェアを用いて生
成するプロセスのことである。生成されたオブジ
ェクトは 3D モデルと呼ばれ,さまざまな業種に
使用(4)される。本研究では AUTODESK 社の 3D
モデリングソフト「MAYA」を使用して,個人を
形成する前の原型の作成を行う。身体の部位ごと
にモデリングを行うことで,写真から得られる身
体データの代入で被写体のモデル生成を可能とし
た。
3 方法
3.1 データ
OpenCV を 用 い て , HSV ( Hue: 色 相 ,
Saturation:彩度,Value・Brightness:明度)で肌色
の閾値を測り,inrange 関数で領域をとる(5)(6)。そ
の後,平滑化,膨張化して,肌色の領域を求める。
その領域の上端と下端の座標を計算して,身長の
もととなるデータを測定する。そして体の各部位
に貼った青いシールを検出し,それぞれのベクト
ルを求めることで,肩幅,腕の長さ,胴体の長さ
のデータを取得する。最後に身長のもとのデータ
と比較することで,3D モデルに入力する原型デ
ータを作成する。
3.2 モデリング
正面からの写真だけでモデルを構築すると,手
間や時間がかかってしまう。そこで,身体情報の
入力のみで被写体のモデルの完成ができるように,
元となるモデルを作成した。モデルは前腕,上腕,
胴体,大腿部,下腿部に分けて作成(7)されており,
より被写体の身体に近づけることができる。作成
したモデルを図 1 に示す。
4 結果と考察
肌色と青シールの二つの領域を求め,座標を計
測した。そしてモデリングに必要なデータを求め
るために,計測した座標とそれぞれの距離を用い
てベクトルで表した(図 2,図 3)。
図 1 作成したモデル(正面,側面)

情報・コンピュータサイエンス分野
- 8 -
また,班員の身体を撮影し,そこからモデルを生
成した。そのモデルを図 4 に示す。
さらに,精度を調べるために実際に元となった
人の身体の各部位の長さをメジャーで測定し, そ
の値を精度 100%として精度の測定を行なった。
結果を表 1 に示す。
表 1 各部位の誤差
実寸法
[cm]
測定データ
[cm]
誤差率
[%]
肩幅 42.2 37.8 -17.5
右腕 53.7 61.9 15.3
左腕 53.0 61.9 16.8
胴体 62.2 60.9 -2.09
右脚 75.0 87.9 17.2
左脚 73.0 86.3 18.2
表 1 を見ると,胴体の長さを除いて, 各部位と
も約 15%の誤差が出てしまっている。シールを貼
る位置を事細かく定めないと左右で違う値が出て
しまい, 結果として誤差が大幅に出てしまうと考
えられる。
また,筋肉質なのか肥満なのかの判定ができて
おらず,正確な身体の太さを示せないことと,画
像処理の精度がまだ低いことが原因ではないかと
考えられる。また,現状では閾値を用いたマスキ
ングのみを行っているため,特定の人体の画像に
しか適用できず,少しでもノイズが乗ると正しい
値が算出できない。そのため,汎用性に乏しいと
言える。
5 今後の課題
現在の 3D モデルの生成方法では精度として使
用に堪えるものではない。そのため,データ取得
の際にはノイズを取り除き,腰の座標を求めるこ
とでより正確に求められるようにする。そして,
特定の人物以外にも使用できるように,正確な人
体認識に加え,シールを検出するためのデータを
用意し,いかなる人物にもより正しいデータを測
定できるようにする。また,身長と体重から割り
出される BMI では,被写体が筋肉質か肥満体か
がわからないため,画像認識の段階でどちらなの
かを判定できるようにする。さらに筋肉質なら筋
肉を盛り上げ,肥満型なら脂肪を表面に出してい
くなど改善して,より被写体の身体に近づけてい
く。
現在,測定データの代入などは人力で行ってい
るので,システムの自動化を行い,誰でも使える
システムにしていく。
参考文献
(1) Chong-Yi Weng ; Brian Curless; Ira Kemelmacher-Shlizerman; University of Washington; Facebook Inc., Photo Wake-Up: 3D Character Animation from a Single Photo, 2018-12-05, pp.1-9
(2) OpenCV:About, Intel Inc., <https://opencv.org/about/> [accessed 2019/09/25]
(3) Sher Minn Chong,画像処理入門講座 : OpenCVとPythonで始める画像処理,POSTD.com, Recruit HoldingsCo.Ltd.,<https://postd.cc/image-processing-101/> [Released 2016/04/06]
(4) 3Dモデリング,Autodesk, Inc., <https://www.autodesk.co.jp/solutions/3d-modeling-software> [参照2019/9/25]
(5) OpenCVによる特定色画素の抽出(RGB vs HSV),技術的特異点.com, <http://tecsingularity.com/opencv/colorextraction/> [accessed 2018/11/10]
(6) @seigot,python OpenCVで赤、青、緑検出,qiita.com, <https://qiita.com/seigot/items/008c95306dbd99a07309> [accessed 2019/09/01]
(7) アルディス=ザリンス; サンディス=コンドラッツ,スカルプターのための美術解剖学,(株)ボーンデジタル,2018-08-25,pp.46-116
図 2 被写体の写真
図 3 領域測定後の画像
図 4 班員のモデル

- 9 -
AI と脳科学に基づく学習アプリケーション開発
Learning APP Based on Neuroscience Using AI
石原 正宗*,小出 崇博*,野沢 明弘*,早川 尚吾*,仲道 嘉夫**
1 背景・目的
本研究のきっかけは知り合いの外国人に「日本
語を効率的に学べるコンテンツが不足していると
いう悩みを相談されたことにあった。
そこで,学習のプラットフォームとして,いつ
でもすぐ学習できるように,身近に持ち運べるス
マートフォンを想定し,効果的に日本語を学ぶこ
とができるアプリとはどのようなものか研究し,
開発した。
日本語を効率的に学べる,使えるようになるに
は文法や単語から勉強するのではなく,使用頻度
の高い会話フレーズから勉強するのが最適だと考
えた。そのため,ビッグデータ解析を用いて,日
常英会話フレーズを使われている頻度順に並べて,
日本語と対にする。そうすることにより,英語圏
で暮らしている人はすぐに言いたい表現を見つけ
られ,日本人も現地で使われている実用的な英会
話フレーズを学習できるようにした。
また,効率的な言語の学習方法として,脳科学
に基づいた「分散学習」という学習効果を格段に
向上させるによる手法に取り入れることにした。
「分散学習」を取り入れることで,日本語をより
早く身につけ,より長く記憶できることが期待で
きる。
そして,これらの効果を検証するため,コンテ
ンツを作成し,スマホアプリとして,App Store と
Google Play に配信する。その後,多くのユーザ
の利用状況を分析し,本アプリの効果を検証する。
2 概要
2.1 ビッグデータ解析
学習する元になるデータはスタンフォード大学,
グーグルブレインなどの研究成果である JERCを
用いた。JERC は 400 万文程の字幕を日英対応さ
せることで構築されている。特徴的な点は,文語
ではなく口語がベースなことである。
この JERCというビッグデータに含まれる英会
話フレーズをカウントして,頻度順に並べ,学習
候補とした。
英会話フレーズは,使いやすくてまとまってい
るデータがなかったため,uKnow という英語と日
本語の会話のフレーズが対になっているサイトか
らウェブスクレイピングし,取得し,使用した。
この JERC というビッグデータから,uKnow
の会話フレーズをカウントすることで,英会話フ
レーズを日常での頻度順にソートした。その結果
を表 1 に示す。
表 1 英会話フレーズ頻度ランキング
Rank English Japanese Count
1 what あれ 167253
2 that's それは~ 78820
3 how どうやって 56362
4 are you そうなの? 52029
5 when いつ 48868
2.2 分散学習
人間は,短期間の間に情報を詰め込むより,1 回
覚えた情報を忘れたタイミングで復習するほうが
効率よく脳に情報を定着させることができる。こ
のように学習することを「分散学習」という。開
発したアプリにおける復習の間隔は,文献(1)の,
人間の記憶の薄れていく時間の平均値をもとに,
復習の間隔を組み立てた「ウォズニアック法」に
基づき設定している。
ウォズニアック法は,人間の記憶が薄れていく
時間の平均値で復習間隔を組み立てている。その
ため,個人それぞれの記憶の薄れていく時間に対
して設計されていない。世の中には,記憶力が良
い人,悪い人がいるため,すべての人にとって最
も効果的な方法ではない。
そこで,私たちは個人の定着率に基づいたアル
ゴリズムを設計して,「分散学習」の復習間隔を思
い出すのが簡単すぎずに,完全に忘れきっていな
いような状態に調整する機能を実装した。定着率
は学習の後,「簡単」,「ちょうど良い」,「難しい」
の3つで評価してもらった。「簡単」と評価した場
合,復習間隔を長くする。「難しい」と評価した場

情報・コンピュータサイエンス分野
- 10 -
合,復習間隔を短くする。最終的に,個人に適し
た「分散学習」の復習間隔になることを目指した。
3 方法
コンテンツには,2.1 で取得したものを使用し,
2.2 のアルゴリズムを組み込んだ日本語学習アプ
リを React Native で開発した。React Native は
iOS アプリと Android アプリを開発できるプラッ
トフォームである。作成したアプリの画面を図1
に示す。
分散学習の復習間隔の調整は,毎日,アルゴリ
ズムで調整した間隔で問題を出題する。その際,
定着率のデータ(「簡単」,「ちょうど良い」,「難
しい」)と問題に回答するまでの時間を,サーバ
に記録し,分散学習の復習間隔を調整し続ける。
4 結果と考察
App Store と Google Play にて,作成したアプ
リを配信したところ,合計 420 ダウンロードされ
た。割合は 60%が日本,20%がアメリカで,20%
がその他の国であった。その中で,継続的に利用
してくれたユーザは 15 人であった。
個人の定着率に基づいたアルゴリズムをユーザ
に適用した結果,通常「1-7-17(ウォズニアック法)」
であった復習間隔が,「2-9-16」,「1-4-15」,「3-7-
16」のように個人ごとにバラついた。
そして,ユーザを無作為に,3日連続で学習し
たグループ(16 人),ウォズニアック法の復習間
隔で学習したグループ(10 人),個人の回答に応
じて復習間隔を調整されたグループ(7人)の3
つのグループに分けて検証した。それぞれのグル
ープに同じ問題(10 問)を3回学習してもらった
後,7日後に同じ問題に対しての定着率を回答し
てもらった。例えば,3日連続で学習したグルー
プには,1日後,2日後,3日後に同じ問題を学
習してもらい,10日後に同じ問題のテストを行
い,それぞれの問題に対しての定着率も取得した。
定着率は,「ちょうど良い」と評価されることが適
切に分散学習できていることの指標となる。表2
に3つのグループがテストを受けた際のそれぞれ
の問題に対して「ちょうど良い」と回答した数の
平均値を示す。
表2 3つのグループの定着率の比較
復習間隔 「ちょうど良い」と回答し
た数の平均値(10 問中)
3 日連続「1-1-1」(16 人) 2.4
ウォズニアック法「1-7-17」
(10 人)
4.7
個人ごと調整「1-4-15, 3-
7-16 など」(7 人)
5.5
3日連続で学習した後,7日後にテストを受け
た多くのユーザは問題に対する自身の定着率を
「ちょうど良い」ではなく,「難しい」と評価した。
個人ごと調整した復習間隔で学習したグループの
方が,ウォズニアック法で学習したグループより
も「ちょうど良い」と回答した平均値が高かった。
これらのことから,予想通り,集中して学習する
よりも,分散学習の方が学習効果が高いことが分
かった。また,個人にはそれぞれ適切な復習間隔
が存在し,適切な間隔に調整することで,学習効
果を高められることが分かった。特に今回の個人
ごとの回答アンケートによる調整はウォズニアッ
ク法より効果があることが判明した。
5 今後の課題
各個人の特性により復習間隔を可変にすること
で学習効率を上げるといった我々のアイデアの効
果は検証できたが,本研究の目標の1つである AI
(機械学習)を活用して素早く各個人に応じた復
習間隔を調整するといったことに関してはデータ
の不足のために達成できなかった。
今後,アプリのインストール数が増えるにつれ
ユーザに関するデータが蓄積されていくので,集
まり次第,訓練データとして AI に学習させてい
きたい。また,ダウンロード数の割には継続して
学習してくれるユーザが少ないので,継続させる
工夫を考えたい。
参考文献 (1) Piotr Wozniak:Optimization of Learning,(1990)
available from <https://www.supermemo.com/en/archives1990-2015/english/ol> [accessed 2019/06/13]
図1 アプリの画面

- 11 -
モーションキャプチャ・筋電センサを用いた運動フォームの改善
Improvement of Exercise Form Using Motion Capture and Myoelectric Sensor
小林 宏彰*,境 文平*,佐藤 貴一*,白須 遼太郎*,髙橋 勇大*,水谷 朝陽*,西澤 吉郎**
1 背景・目的
私たちは「持続可能な開発目標 -sustainable
development goals-」の 3 番目「すべての人に健
康と福祉を-good health and well- beings-」から,
健康寿命と平均寿命の関係性について着目した。
日本人の多くは運動不足であり,健康寿命が尽
きた後の年数の平均が,男性で 9.2 年,女性で 12.7
年にも達している。健康寿命(1)が切れてしまう原
因の一つとして筋肉が衰えてしまうことが挙げら
れる。運動を全くしなければ筋肉はどんどん衰え
るが,多くの人は日常動作で補えるのであまり問
題ではない。
しかし,それが間違った動作であると一部の関
節や筋肉に負担がかかり,結果として体に害をな
してしまう。例えば猫背になると関節の動きも悪
くなり激しい運動などの際に体を痛めやすくなる。
さらに年を取るにつれて,簡易な運動でも体を痛
めやすくなる(2)。正しいフォームであると正しい
筋肉の発育にもつながる。
そこでモーションキャプチャによって体の動き
を単純化し,さらに筋電センサによって重要な筋
肉の力を読み取ることで,より効果的に運動フォ
ームを改善することが私たちの研究である。
従来にもモーションキャプチャを用いた運動フ
ォームの改善システムは存在する。しかし,そこ
に筋電を合わせたものはなく,アスリートのため
のものであったり,リハビリ用であったりするの
で高価で一般人が使うには難しいなどの問題があ
る。本研究は「すべての人に健康と福祉を」とい
う 17 の目標を満たすように,使用者のモチベー
ションを保てるようなシステムを目指し開発,実
験を行った。
2 概要
2.1 モーションキャプチャ
モーションキャプチャには Microsoft 社の
Kinect を用いた。Kinect は人体の関節の位置を
読み取り座標として出力する。指の形まではわか
らないが,手首の曲げ具合までは見ることができ
る。
2.2 筋電センサ
筋電センサにはMyoWare 筋電センサを用いる。
行う運動の
重要な筋肉
に筋電セン
サを取り付
ける。筋電
は最大で5
V まであり
筋肉の量に
関係なく動
かそうとする電力量を読み取る。筋電センサは
Arduino に接続し,無線モジュールを用いてパソ
コンと通信する。Arduino をつけたベルトを被験
者が装着し,そこからケーブルを伸ばして目的の
部位に筋電センサをつける(図 1)。
2.3 データ取得,比較プログラム
モーションキャプチ
ャと筋電センサでとっ
たデータは図 2 のよう
に表示され,ファイル
に筋電センサの値とと
もに書き込まれ,関節
の座標をもとに作られ
た棒人間のような形で
表示する。運動フォー
ムを改善するためには
手本のデータと動きを
似せるので二つのデー
タを重ねて表示するプ
ログラムを作成した。
二つのデータの中心と
身長をある程度揃え,
視覚的な理解を容易にするために手本のデータと
比較する際に映像をコマ送りする方式をとった
(図 3)。またどれぐらい二つのデータが似ている
のかというスコアを計算によって算出するプログ
図 1.筋電センサと無線モジュール
図 3.データ比較プログラム
図 2.データ取得プログラム

情報・コンピュータサイエンス分野
- 12 -
ラムも作成し,手軽な比較もできるようにした。
その際にどの時間とどの時間を対応させたかの記
録をファイルに出力し,それを参照してコマ送り
ができるようになっている。
3 方法
手本となるデータ
を用意し被験者のフ
ォームをそれに似せ
るように訓練するこ
とで,運動能力が向
上したということを
示す必要がある。そ
こで,単純でフォー
ムや筋肉の使い方が
重要であり,結果を数値で表しやすい運動である
ダーツを用いることにした。
ダーツ盤は図 4 のものを使用し,プロライセン
スを持つ選手を 2 人お招きし,筋電センサを上腕
二頭筋と前腕屈筋群につけ,Kinect と合わせてデ
ータを取った。そのデータと比較しながら 4 人を
被験者とし練習を 5 日行った。プロの選手には体
格差とフォームの違いがあったので,背の高いほ
うを A,低いほうを B とし担当を振り分けた。
フォームと筋電のデータを定期的に測定し,そ
の都度手本と比べる図 3 のような画面を見せアド
バイスをした。また,ダーツの通常の点数ではな
く,どれだけ中心に近いかを調べるため中心の赤
と黒の円を 1,トリプルエリアを 3,はずれを 8
と,エリアごとに数字を与えて結果を記録しその
日の平均を算出した。
4 結果と考察
結果は,表 1 のようになった。
この結果を受けて本研究の効果があると考えら
れる。ただ,白須のように手本と体格差が大きい
とあまり効果が得られないこともわかった。比較
して図 3 のように表示するときは身長を揃え,手
本より投げる角度を変えるなどの工夫もしたが,
あまりうまくいかなかった。最終的なフォームの
完成度は手本とフォームのみで 5 日目にとったデ
ータを前述のプログラムで計算したものである
(同じプロのデータを比較したところスコアは
801 になった)。白須は水谷よりフォームが似てい
ると判定されているが,スコアは水谷の方が高い。
このことからも,手本との体格差が結果に影響を
及ぼしていると考えられる。また,一番良い結果
は 3 日目の水谷であるが,水谷はもともと別のフ
ォームで投げていたこともあり,5 日目は調子が
下がったようだ。練習期間が長ければ,水谷が 3
日目に出したようなスコアが持続するようになる
だろう。
5 今後の課題
手本と被験者の体格差があると良い結果が出な
いことがわかった。いろんな体格に合わせたデー
タを用意するのは難しいので運動の種類によって
身長差の考慮の仕方を変えるような設定をできる
ようにするべきだと思う。例えば今回のダーツで
あれば投げる角度を補正し,階段の昇降などであ
れば足を上げる角度を補正するようなプログラム
を作れば良い。また,今回の実験ではデータを取
る時にダーツを連続で 3 投してもらったが比較プ
ログラムは性能が悪いので,その中の任意の 1 投
を切り出して比較を行った。プログラムの性能を
向上させ,長時間の比較にも耐えられるようにす
べきだ。他にもハード面でも課題が有り,筋電セ
ンサと Arduino をつなぐ線が激しい,または長時
間の運動によってちぎれてしまい,運動の妨げに
なってしまうことがある。より小さいマイコンを
使用して筋電センサとマイコンの距離を縮めるこ
とが必要になる。これらの問題を解決し,姿勢や
運動フォームの改善システムとして多くの人が使
用できるシステムとなり,健康寿命の延伸に貢献
していきたい。
参考文献
(1) 終活ネット:日本は健康寿命が世界一です,寝たきり期間も世界一?,オンライン,入手先 〈 https://syukatsulabo.jp/article/1516 〉 [ 参 照2019/6/7]
(2) 日本施術マイスター養成協会:猫背が原因で起こる症状(オンライン), 入手先 〈https://jmtta.org/about-nekoze/symptom/〉 [参照 2019/09/25]
表 1.実験結果
手本 備考 1 日目 3日目 5日目 フォームの
完成度
小林 なし 6.3 4.7 3.4 2802
佐藤 B 体格差少 4.7 4.7 3.2 1605
白須 A 体格差大 7.7 5.3 4.4 2350
水谷 A 体格差少,
ダーツ経験者 3.7 2.7 3.2 2417
図 4.使用したダーツ盤

- 13 -
減少する労働力を補填するための自動運搬車の研究
The Research of an Automatic Transport Vehicle to Compensate
for Decreasing Labor Force 二瓶 康太朗*,野村 隼大*,橋本 航雪*,畑中 颯太*,本多 正知*,近藤 千香**
1 背景・目的
日本の人口は減り続けている。年金の制度を見
ても,昔は約 10 人の若者が 1 人の高齢者を支え
ていたが,今は 3 人が 1 人を,そして 2050 年に
は 1 人が 1 人を,という予測もある(1)。つまり,
日本は働ける若者の割合が非常に低い国であり,
この問題はこれから更に深刻化していくというこ
とである。更に働ける若者が減少していけば,当
然日本の経済も衰退していくだろう。そこで,私
たちは,これからの減少していく労働力を補填す
るために,コストを抑えつつ労働力を補える画像
認識を用いた自動運搬車の研究をしようと考えた。
現在の自動運搬車は,レールを敷いたり床にライ
ンを引いたりしなくてはならず,設置に多額のコ
ストがかかり,かつ大掛かりな工事を要するため
に導入が大変である。これらの問題を解決するた
め,画像認識や QR コード,消失点検出の技術を
用いた。本研究で開発している自動運搬車は,屋
内の人がいる状況での採用を想定しているので,
導入しやすいだけでなく,できるだけ人の邪魔に
ならないようにデザインしている。また,どのよ
うな建物で使用されるかはわからないため,様々
な状況にも対応できるような汎用性を備えたもの
にする必要がある。
2 概要
2.1 システム構成
システムの全体の流れを図 1 に示す。本研究で
は,画像認識を用いて人が機体の前にいるかを判
断し,必要に応じてブレーキするようにしている。
QR コードは建物の床に貼り,それを機体に搭載
したカメラで読み取ることによって機体が建物の
マップ把握やルート探索をするために,消失点検
出は機体が道の中央から逸れていた場合にそれを
修正することで壁や設置物との衝突を回避するた
めにそれぞれ用いている。これらの技術で得られ
た命令を機体の左右に搭載したモータに送ること
で,停止や進行,方向転換を行っている。
2.2 画像認識によるブレーキシステム
この自動運搬車は今後の発展のため,距離セン
サではなく画像認識を用いたブレーキシステムを
採用している。今回,Google の Mobile_Net(ver.1)
を転移学習させることで画像認識 AI を作成した
が,それでもラズベリーパイの処理速度は,約
1fps と遅かったため,ラズベリーパイをサーバと
して立て,ラズベリーパイで得た画像データをク
ライアントである PC に送信し,PC で AI の演算
を行い,その結果をラズベリーパイに送り返すこ
とで,フレームレートを上げることができた。
2.3 QR コードによる現在地把握
機体が現在位置を確認するのに,今回は QR コ
ードを採用した。QR コードには機体を動かす場
所のマップのデータが図 2 のような行列として内
包されており,それを加減算することで,目的地
の方向や,車体の向きなどを認知している。また,
QR コードにはパスコードが入っており,他の QR
コードには反応しないようになっている。
図 2 マップデータの行列
0 1 1 00 1 1 00 0 0 00 1 1 00 1 1 0
図 1 全体の流れ
情報・コンピュータサイエンス分野
- 14 -
2.4 マイコンでの実装
実装するうえで,ラズベリーパイと Arduino と
いうマイコンをこの課題研究では利用している。
ラズベリーパイは上記3つの処理を行うため,
Arduino はラズベリーパイからの処理結果を受け
取り,モータを回すために用いている。
2.5 消失点検出による機体の姿勢制御
まず,車体正面画像から直線検出を行い,それ
らの交点をすべての組み合わせに対して求め,最
後に交点が最も密集している部分を区間縮小法に
よって割り出すことで疑似的な消失点の検出を可
能にしている。まずは,Line Segment Detector
(lsd)という Python の直線検出ライブラリを用い
て,画像内に存在する直線を検出する。そこから,
傾きが大きすぎるものや小さすぎるもの(縦線や
横線等)をなくし,それらすべての組み合わせで交
点を求める。そして,区間縮小法で疑似的な消失
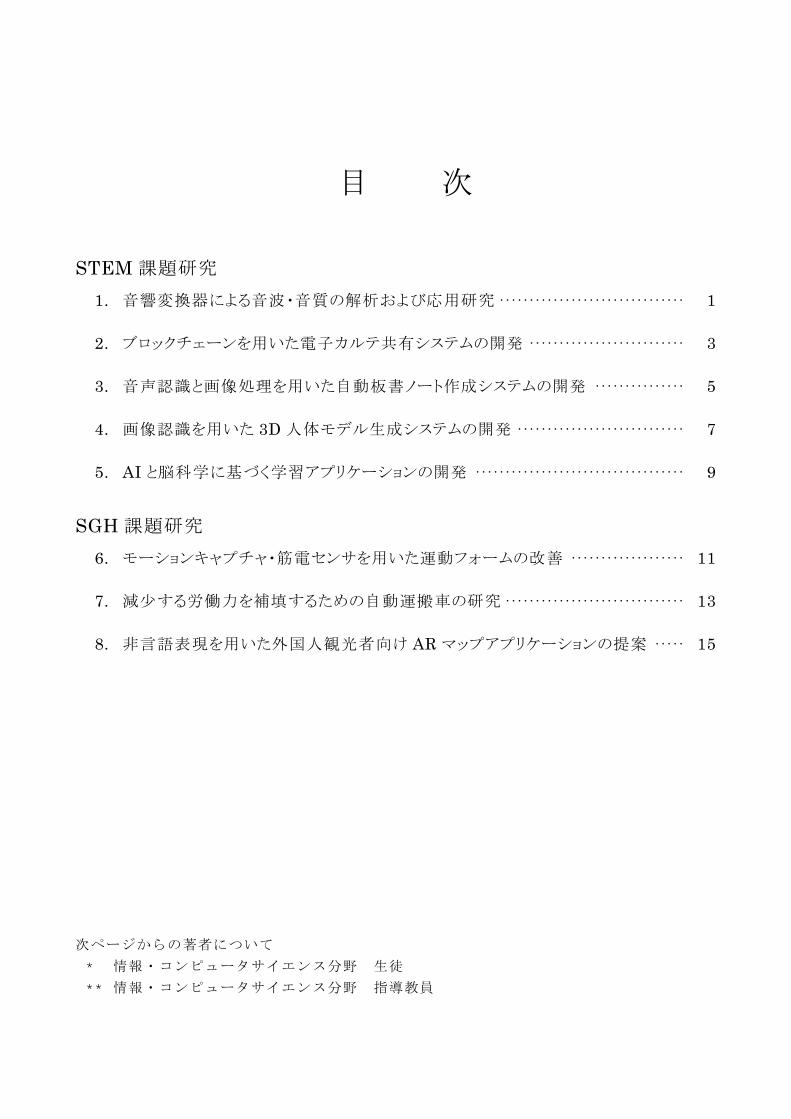
点の座標を求める。区間縮小法とは,図 3 のよう
に画像を四等分にし,それぞれ点の数を数え,最
も多かった部分をまた四分割し,今度はその4つ
で点の数を競う。これを繰り返すことで,点が密
集しているところが分かるという手法である。ま
た,消失点検出のメリットはどの程度車体が傾い
てしまっているのかがわかるという点である。そ
の度合いに応じて,左右のモータの出力比を変え
ることでスムーズに方向修正を行える。
3 方法
検証は,システムの各部分(画像認識・QR コー
ド認識)のテストを行い,その後本格的な試走の実
施を予定している。試走は,右折,直進,左折を
含む校舎一号館を走行させることで行う。これに
より,人が目の前に現れた時に止まれるか,右折
ができるか,左折ができるか,車体の向きを修正
しながら直進できるかなどを満たしているか検証
する。
4 結果と考察
本研究では,画像認識によるブレーキシステム
と消失点検出による機体の姿勢制御のシステムが
完成している。ブレーキシステムでは,人が前に
立っている場合に,足の大まかな位置を把握しつ
つ停止する指示を出せるようになり,消失点検出
では,機体を傾かせた状態で開始してもその後に
正面に方向を修正しながら走れるようになった。
これらのことから,レールやラインを引かなくて
も人や壁に衝突せずに走れるようになったと考え
られる。
5 今後の課題
QR コードを読み取りマップを把握するシステ
ムを様々な建物にも対応できるようにすることで,
自動で運搬できるシステムが実現できる。また,
サーバに各機体の位置情報が送られることにより,
同じ施設内での複数台の走行も可能になると考え
られ,処理を複数のマイコンで分担する必要がな
くなるので,カメラの台数も減らすことができる
と考えられる。加えて,今後のソフトウェア開発
の進展により,車体カメラで倒れている人を認識
するというように他の機能を付けるなど,さらな
る展望が望める。機体の外装の面では,材質や機
体構造の再検討,量産化に向けて改良,効率化す
るべき点の検討や,暗所での画像認識,走行を可
能とするためヘッドライト,テールライトなど各
種照明具を搭載することによって,周囲からの視
認性が向上すると考えられる。また,今回は電源
に乾電池を使用したが,将来的には充電式バッテ
リーを使用し,マイコン駆動とモータ駆動バッテ
リーを統一,自動充電を実現することで更なる導
入の簡単化が見込める。
参考文献
(1) 厚生労働省:平成29年版厚生労働白書 -社会保障と経済成長-(本文),オンライン,入手先 〈https://www.mhlw.go.jp/wp/hakusyo/kousei/17/dl/2-01.pdf〉[参照2019/06/11]
(2) 太田満久,須藤広大,黒沢匠雅,小田大輔:(2018年4月19日),現場で使える!TensorFlow開発入門・Kerasによる深層学習モデル構築手法,翔泳社
(3) 足立悠:(2017年4月28日),初めてのTensorFlow数式なしのディープラーニング,リックテレコム
(4) 谷岡広樹,康鑫:(2018年2月28日),いちばんやさしいディープラーニング入門教室,株式会社ソーテック社
(5) Qiita:活性化関数のまとめ(ステップ,シグモイド,ReLU,ソフトマックス,恒等関数),オンライン,入手先
〈 https://qiita.com/namitop/items/d3d5091c7d0ab669195f〉[参照2019/06/11]
図 3 区間縮小法

- 15 -
非言語表現を用いた外国人観光者向け AR マップアプリケーションの提案
Proposal of Augmented Reality (AR) Map Application for Foreign Tourists
Using Nonverbal Expressions 櫻庭 萌菜子*,中谷 結香*,中村 遥佳*,深池 美玖*,近藤 千香**
1 背景・目的
現在,日本はオリンピック開催を約 1 年後に控
えている。オリンピックには 207 カ国の参加が予
定されている。オリンピックに先駆け,開催国の
発表が行われた 2013 年辺りからの外国人観光客
の数が爆発的に増加した。その中でも,英語圏,
中国や韓国以外の国からの来訪者が 2013 年から
2018 年で約4倍に増えた(1) (図 1) 。
これらのことからある特定の言語を使用しな
い,非言語的なアプローチで外国人に情報を伝え
るべきであるという仮説をたてた。非言語表現と
は,言葉・文字を直接用いずに行われる情報伝達
のことであり,主にジェスチャーや絵を用いて行
われる。今回は絵(ピクトグラム)を使用し,日本語
や英語などの主要な言語を使用しない人でも地図
の情報を理解可能にすることを目標とする。また
拡張現実(AR)を使用し,文面や音声での情報では
なく直感的に目的地まで案内できるような仕組み
も製作する。
2 概要
2.1 ピクトグラム
現在,様々なピクトグラムが使われているが,
その中でも外国人が意味を把握しづらいと思われ
るものや地図記号を独自で選び,それらについて
新たにピクトグラムを作成した。また,オリンピ
ックマップで使用する公式ピクトグラムについて
使用申請を行い,許可を得た (図 2) 。
2.2 平面マップ
Mapbox に用意されている基本テンプレートに,
サイズの変更やピクトグラムの変更,情報の追加
を行うことで作成した。外国人に必要になると考
えられる,日常マップ,災害マップ,オリンピッ
クマップの3種類にわけて作成した。非言語表現
を用いるため,アイコンサイズは大きく設定して
いる。
2.3 AR ナビゲーション
Unity を使用し,カメラを向けた先に目的地の
方向を指す矢印を表示させ,目的地までの距離を
示すことで AR でのナビゲーションを実現した。
また,行きたい場所を選択することでナビゲーシ
ョンが開始できるようにメニュー画面を作成した。
2.4 Xcode
作成した 3つのマップを一つのアプリケーショ
ンに統合し,それぞれのマップに切り替えできる
ようにメニュー機能を搭載した。また,目的地の
座標を指定することで,平面マップ上にルートが
表示されるようにした。AR ナビゲーションは
Swift と Unity の統合が難航しているため,今後
の課題となっている。
3 方法
ベースとなるマップの UI の開発(ピクトグラ
ム・地図の作成)を行い,それを使用して,ナビ
ゲーション側と AR 側に分けて開発を行った。自
分たちで考案したピクトグラムや,オリンピック
の公式アイコンなどを使用したベースとなるマッ
プを,Mapbox スタジオ内で作成した。情報の追
加は,GeoJSON ファイルで行い,レイヤー削減
図 1 訪日外客数と使用言語の内訳
図 2 GeoJSON ファイルでの情報の追加

情報・コンピュータサイエンス分野
- 16 -
のために MBTiles に統合した後に地図へと反映
させた。
作成したマップは,広域避難場所や避難所,
AED の場所を反映させた「災害マップ」,オリン
ピックの競技場所を表示した「オリンピックマッ
プ」,作成したピクトグラムを反映させた「日常マ
ップ」の3つである。
AR 側では Unity で提供されている AR
Foundation のパッケージ及び Asset の AR+GPS
Location(2)を用いて,指定した緯度・経度の位置
に作成したオブジェクトを配置することで,スマ
ートフォンのカメラであたかもそこにオブジェク
トがあるように実装した。オブジェクトは目的地
表示用とナビゲーション用の 2 種類を作成した。
前者は GeoJSON の地点データの位置に作成した
ピクトグラムを配置し,後者は Asset の Arrow
Waypointer(3)を使って目的地までの道程の途中
に道標となる矢印を配置した。また AR 画面の UI
として,目的地までの距離表示と目的地選択メニ
ュー画面も実装した (図 3) 。
Xcode で作成したアプリケーションは,
Collection View Controller でメニュー画面を作
り,3 つのマップをまとめた。マップは作成した
マップのスタイル URL を取得することでシーン
に表示させた。また,マップ上で目的地を長押し
することでポイントを設定し,現在位置から目的
地までの平面マップ上でのルートを表示させるよ
うにした。
4 結果と考察
本研究で作成したピクトグラムについて,フィ
リピン,タイからの留学生と教員 15 人を対象に,
アンケートを実施した。調査内容は,同じ施設を
表す 2 つのピクトグラムの作成案を見せ,どちら
がよりわかりやすいか回答してもらう 2 択形式に
した。作成したピクトグラムと調査の結果を図 4
に示す。
アンケート調査の結果,非言語表現でわかりや
すく地理情報を伝えられることがわかった。学校
のピクトグラムについてはタイ,フィリピンどち
らの国でも意見が割れたが,校舎を表した案 1 の
方が僅かに票が多かった。よって,アプリケーシ
ョンには案 1 のピクトグラムを実装することとし
た。
広域避難場所のピクトグラムについては,タイ
では案 1,フィリピンでは案 2 の得票率が高かっ
た。これにより,国によって結果に差が出ること
がわかった。これから更に調査を進め,どちらの
案を採用するか検討したい。
5 今後の課題
Unity で作成した AR ナビゲーションと平面マ
ップを表示させたアプリケーションが統合されて
いないので,一つのアプリケーションにまとめる
ことが課題となっている。また,タイとフィリピ
ン以外の国の人にも同様の検証を行い,各国のデ
ザインとの関連性も加味して,デザインを検討し
改善していく必要がある。
参考文献
(1) 日本政府観光局(JNTO): 訪日外客数・出国日本人数データ|統計・データ|日本政府観光局(GNTO),入手先〈 https://www.jnto.go.jp/jpn/statistics/visitor_trends/〉[参照日2019/06/06]
(2) DANIEL FORTES : AR + GPS Location - Unity Asset Store, available from〈https://assetstore .unity.com/ packages/tools/integration/ar-gps-location-134882〉[accessed 2019/06/08]
(3) TURNTHEGAMEON : Arrow Waypointer - Unity Asset Store, available from〈https://assetstore.unity.com/ packages/tools/particles-effects/arrow-waypointer-22642〉[accessed 2019/09/25]
図 3 AR ナビゲーションの様子
図 4 調査結果





























