Embed Size (px)
Citation preview

UNIVERZA V LJUBLJANIPEDAGOSKA FAKULTETA
FAKULTETA ZA MATEMATIKO IN FIZIKO
DIPLOMSKO DELO
NEJC STAMCAR
UNIVERZA V LJUBLJANIPEDAGOSKA FAKULTETA
FAKULTETA ZA MATEMATIKO IN FIZIKO
Studijski program: Matematika in fizika
Totalna ukrivljenost krivulj v prostoru inFary-Milnorjev izrekDIPLOMSKO DELO
Mentor: dr. Matija CenceljKandidat: Nejc Stamcar
Ljubljana, avgust, 2012

Povzetek
Namen diplomskega dela je preucitev vec vrst ukrivljenosti parametriziranih krivulj,se zlasti totalne ukrivljenosti, hkrati pa tudi predstavitev ter podrobno dokazovanjeFary-Milnorjevega izreka. Diplomsko delo govori o parametriziranih krivuljah in nji-hovih najrazlicnejsih lastnostih. Obravnava sklenjenost krivulj, njihovo periodicnost,razlicne vrste ukrivljenosti, konveksnost ter zavozlanost krivulj. Zajema tako krivuljev ravnini, kot tudi krivulje v prostoru R3 in vec-dimenzionalnih prostorih.
V diplomi smo najprej spregovorili o krivuljah v poljubnih n-dimenzionalnih prostorih.Osredotocili smo se zgolj na krivulje, ki so podane parametricno. Natancno smo poja-snili, kdaj so krivulje regularno parametrizirane in kdaj so parametrizirane z naravnimparametrom. Nadaljevali smo z raziskovanjem periodicnih in sklenjenih krivulj, ter zugotavljanjem medsebojne povezave med tema dvema pojmoma. Posebej smo se se-znanili tudi s pojmom enostavno sklenjenih krivulj.
Nato smo posebej spregovorili se o krivuljah v ravnini in prostoru R3. Podrobno smopreucili konveksnost, fleksijsko ukrivljenost, torzijsko ukrivljenost, ortogonalno in Fre-netovo bazo prostora, povezavo med obema vrstama ukrivljenosti in vektorji, ki tvorijoFrenetovo bazo. Pojasnili smo tudi pojme pritisnjena, normalna, rektifikacijska rav-nina. Raziskali smo totalno ukrivljenost in deloma tudi zavozlanost krivulj.
Zakljucili smo z orisom zivljenja in dela dveh pomembnih matematikov (Istvan Fary,John Milnor), predstavitvijo izreka, ki nosi njuno ime, ter s podrobnim dokazovanjemtega izreka.
Kljucne besede: ambientna izotopija, binormala, dolzina krivulje, enostavno skle-njena krivulja, Fary-Milnorjev izrek, fleksijska ukrivljenost, Frenetova baza, Frene-tove formule, izotopija, konveksna krivulja, lema o dvigu, mostovno stevilo, normala,normalna ravnina, parametrizacija, parametrizacija z naravnim parametrom, perioda,periodicna krivulja, pritisnjena ravnina, regularna parametrizacija, rektifikacijska rav-nina, sklenjena krivulja, tangenta, torzijska ukrivljenost, totalna ukrivljenost, vozel,zavozlana krivulja, zvezdasta mnozica

Abstract
Purpose of diploma thesis is examining several types of curvature of parametrized cur-ves, especially total curvature, as well as presentation and detailed proof of Fary-Milnortheorem. Thesis is about parametrized curves and their various characteristics. It dealswith closed curves, their periodicity, different types of curvature, convexity of curvesand knotted curves. It includes both curves in the plane, as well as curves in space R3
and multi-dimensional spaces.
In diploma we first discussed about curves in optional n-dimensional spaces. We focu-sed only on the curves, which are given parametrically. We precisely explained, whenthe curves are regular parametrized and when they are parametrized by arc-length. Wecontinued with research of periodic and closed curves, and with identifying a correla-tion between these two terms. We have also become familiar with the term of simpleclosed curves.
Then we specifically talked about plane curves and curves in space R3. We examinedin detail the convexity, curvature, torsion, orthogonal and Frenet basis of space, theconnection between the two types of curvature and the vectors that form Frenet basis.We explained the concept of osculating, normal and rectifying plane. We have investi-gated total curvature of curves and partially investigated knotted curves.
We concluded with the outline of life and work of two important mathematicians(Istvan Fary, John Milnor), a presentation of theorem that is named by them, aswell as with detailed proof of this theorem.
Key words: ambient isotopy, binormal, bridge number, closed curve, convex curve,curvature, Fary-Milnor theorem, Frenet basis, Frenet formulas, isotopy, knot, knottedcurve, length of a curve, lifting lemma, normal, normal plane, osculating plane, pa-rametrisation, parametrisation by arc-length, period, periodic curve, rectifying plane,regular parametrisation, simple closed curve, star-shaped set, tangent, torsion, totalcurvature

Kazalo
1 UVOD 2
2 KRIVULJE V Rn 32.1 Parametrizirane krivulje . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Sklenjene krivulje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 KRIVULJE V RAVNINI IN PROSTORU 153.1 Ukrivljenost ravninskih krivulj . . . . . . . . . . . . . . . . . . . . . . 153.2 Konveksne ravninske krivulje . . . . . . . . . . . . . . . . . . . . . . 173.3 Zvezdaste mnozice . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.4 Ukrivljenost krivulj v prostoru . . . . . . . . . . . . . . . . . . . . . . 253.5 Zavozlanost krivulj v prostoru . . . . . . . . . . . . . . . . . . . . . . 35
4 FARY-MILNORJEV IZREK 394.1 Istvan Fary, John Milnor . . . . . . . . . . . . . . . . . . . . . . . . . 394.2 Izrek . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 414.3 Dokaz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5 ZAKLJUCEK 46
6 LITERATURA 47

1 UVOD
Geometrija [30] je eno najstarejsih in najzanimivejsih podrocij matematicne znanosti.Zacetek njenega razvoja sega dalec v preteklost, v obdobje okoli leta 3000 pr.n.st.Tedaj so jo ljudje na obmocju Mezopotamije in starega Egipta zaceli razvijati in upo-rabljati predvsem za potrebe merjenja. Scasoma je geometrija postala uporabna tudiza resevanje prakticnih problemov na podrocjih astronomije, arhitekture in navigacije.Ko pa je postala pomembnejsa od uporabnosti zelja po razumevanju, je geometrijadozivela nagel preobrat. Najbolj fascinantno pa je dejstvo, da je temelje sodobni ma-tematicni geometriji postavil ze Evklid okoli leta 300 pr.n.st.
Tudi sam sem ze od nekdaj navdusen nad lepoto in prakticnostjo te matematicne vede.V casu fakultativnega izobrazevanja pa sta me navdusili se dve drugi veji matematicneznanosti, to sta teorija vozlov in teorija grafov. Proucevanje krivulj v prostoru je bilazato idealna tema za mojo diplomsko nalogo, saj na nek nacin zdruzuje vsa ta, meniljuba podrocja.
Osnovni namen te diplome je preucitev razlicnih lastnosti krivulj v prostoru, se zlastipa njihove ukrivljenosti. Moj glavni cilj, ki ga zasledujem skozi diplomo pa je, razu-meti, kaj nam pove Fary-Milnorjev izrek, ter predvsem dokazati njegovo veljavnost.Diplomsko delo je razdeljeno na tri vecja poglavja.
V prvem poglavju se seznanimo s pojmom parametrizacije in parametriziranih krivulj.Za boljso predstavo je navedenih tudi nekaj konkretnih primerov taksnih krivulj. Seposebej se osredotocimo na krivulje parametrizirane z naravnim parametrom. V tempoglavju si razjasnimo tudi pojem sklenjenih krivulj, se zlasti enostavno sklenjenih kri-vulj.
V drugem poglavju pozornost usmerimo na ravninske krivulje in krivulje v prostoruter si razjasnimo pojme ukrivljenosti, konveksnosti in zavozlanosti krivulj. Se posebejse seznanimo s tako imenovano totalno ukrivljenostjo krivulj.
Tretje poglavje je namenjeno predstavitvi Fary-Milnorjevega izreka ter analiziranjuzivljenja dveh matematikov, cigar ime nosi omenjeni izrek. Podrobno je pojasnjenotudi zaporedje dokaza tega izreka.
2

2 KRIVULJE V Rn
Krivuljo definiramo kot mnozico tock v n-dimenzionalnem prostoru, za katero velja,da ima vsaka njena tocka okolico, kjer delcek krivulje v tej okolici izgleda kot daljica[33].
Locimo krivulje v 2-dimenzionalnem prostoru (ravninske krivulje), krivulje v 3-dimenzi-onalnem prostoru, krivulje v 4-dimenzionalnem prostoru, krivulje v 5-dimenzionalnemprostoru, ... Med splosno znane ravninske krivulje sodijo: premice, stoznice (elipsa,kroznica, hiperbola, parabola), lemniskate, spirale, odvojne krivulje, itd. Najbolj znanekrivulje v prostoru so vijacnice [31].
Krivulje v n-dimenzionalnem prostoru lahko podamo na tri nacine: eksplicitno, impli-citno ali parametricno [33].
2.1 Parametrizirane krivulje
Gladke parametrizirane krivulje so krivulje, ki so dane parametricno. Na primer, v3-dimenzionalnem prostoru to pomeni, da je krivulja c dana kot mnozica vseh tock(x, y, z), dolocenih z x = α(t), y = β(t) in z = γ(t) , kjer so α, β in γ zvezne funkcije,ki slikajo iz intervala [t0,t1] v mnozico realnih stevil. Krivulja c je torej v tem primeru
c = {(α(t), β(t), γ(t)) | t ∈ [t0, t1]},kjer preslikavi c(t) := (α(t), β(t), γ(t)) pravimo pot oziroma parametrizacija krivulje c.Kaksna pa je splosna definicija ? Najprej predpostavimo, da je I ⊂ R poljuben interval,ki je lahko zaprt, odprt ali pol-odprt; omejen ali neomejen. Gladka parametriziranakrivulja je preslikava c : I → Rn , ki jo je mozno poljubnokrat odvajati [2]. Odslejbomo pridevnik gladka izpuscali, saj bodo vse nase krivulje gladke.
Med vsemi parametriziranimi krivuljami so se posebej zanimive za obravnavo tako ime-novane regularno parametrizirane krivulje. Za potrebe njihovega definiranja je najprejpotrebno definirati se dva druga pojma. Odvodu poti c : I → Rn pravimo vektorhitrosti in ga zapisemo ˙c(t). Ce za nek t velja ˙c(t) = 0 , potem tocki t pravimo re-gularna tocka parametrizacije c. Definicija regularno parametrizirane krivulje se takoglasi: Krivulja c je regularno parametrizirana [2, 34] , ce za vse tocke t iz intervala Ivelja, da so regularne; torej ce za vsak t ∈ I velja ˙c(t) = 0 . Poglejmo si nekaj primerovregularno parametriziranih [2] krivulj:
Primer 2.1.1 : Premica je najpreprostejsi primer regularno parametrizirane krivulje.Podamo jo s funkcijo c : R → Rn , c(t) = c0 + t · v , kjer c0 ∈ Rn ter v ∈ Rn − {0} .
3

Primer 2.1.2 : Tudi vijacnica je regularno parametrizirana krivulja. Podana je s funk-cijo c : R → R3 , c(t) = (r · sin(t), r · cos(t), h · t) , kjer r > 0 ter h > 0 .
Slika 1: Vijacnica
Primer 2.1.3 : Regularno parametrizirani krivulji, ki je podana s funkcijo
c : (0,π
2) → R2 , c(t) = (sin(t), cos(t) + ln tg (
t
2))
pravimo traktrisa ali vlecnica.
Slika 2: Traktrisa
4

Primer 2.1.4 : Primer taksne krivulje je tudi kroznica . Podana je s funkcijo c : R → R2,c(t) = (r · cos(t), r · sin(t)).
Med regularnimi parametrizacijami so zaradi svoje uporabnosti se posebej zanimivetako imenovane parametrizacije z naravnim parametrom. Definicija pravi: krivuljaenotske hitrosti oziroma krivulja parametrizirana z naravnim parametrom [2] je regu-larno parametrizirana krivulja c : I → Rn , za katero velja ∥ ˙c(t) ∥= 1 za vsak t ∈ I,pri cemer z ∥ ∥ oznacujemo normo oziroma dolzino vektorja. To so torej krivulje skonstantno hitrostjo 1. Toda zakaj so taksne krivulje tako zelo uporabne ?
Preden odgovorimo na to vprasanje, si poglejmo se eno definicijo. Naj bo c : [a, b] → Rn
parametrizirana krivulja. Potem je dolzina krivulje c enaka
s =
∫ b
a
∥ ˙c(t) ∥ dt oziroma s =
∫ b
a
√˙c(t) · ˙c(t) dt .
Po tej definiciji [2] torej za vsako krivuljo c : [a, b] → Rn , parametrizirano z naravnimparametrom, velja, da je dolzina s te krivulje od zacetne tocke A, ki ima t = a dokaterekoli poljubne tocke T pri parametru t za vsak t ∈ [a, b], enaka
s =
∫ t
a
∥ ˙c(t) ∥ dt =
=
∫ t
a
1 dt =
= t− a .
Taksna krivulja je torej v celoti dolga natanko toliko kot interval parametra t.
Zeleli bi si, da bi lahko vsako krivuljo imeli parametrizirano z naravnim parametrom.Na konkretnem primeru si poglejmo, kako lahko krivuljo, ki ni parametrizirana z na-ravnim parametrom, parametriziramo na taksen nacin.
Primer 2.1.5 :Kako poiscemo naravno parametrizacijo [33] krivulje, ki je podana parametricno s
c(t) = (a · cos(t), a · sin(t), b · t) ,
kjer 0 ≤ t ≤ 2π, a > 0 ter b ≥ 0 ?
(1) Najprej v enacbo za dolzino te krivulje vstavimo meje integriranja :
s =
∫ t
0
√˙c(t) · ˙c(t) dt .
5

(2) Nato izracunamo odvod parametrizacije te krivulje:
˙c(t) = (−a · sin(t), a · cos(t), b) .
(3) Ta odvod vstavimo v ze prej nastavljeno enacbo za dolzino ter to dolzino izracunamo:
s =
∫ t
0
√a2 · sin2(t) + a2 · cos2(t) + b2 dt =
=
∫ t
0
√a2 · (sin2(t) + cos2(t)) + b2 dt =
=
∫ t
0
√a2 · (1) + b2 dt =
=
∫ t
0
√a2 + b2 dt =
=√a2 + b2 · t .
(4) Iz zgoraj dobljene enacbe s =√a2 + b2 · t izrazimo t in dobimo:
t =s√
a2 + b2.
(5) V zadnjem koraku parameter t, izrazen s s, vstavimo v prvotno parametrizacijoc(t) = (a · cos(t), a · sin(t), b · t) . Tako dobimo krivuljo, parametrizirano z naravnimparametrom:
c(t) = (a · cos( s√a2 + b2
), a · sin( s√a2 + b2
), b · s√a2 + b2
) .
2.2 Sklenjene krivulje
Sklenjenost je se ena od pomembnih lastnosti krivulj. Toda se predno lahko povemokaj o njej, moramo najprej definirati periodicnost [2] krivulj. Naj bo c : R → Rn
parametrizirana krivulja. Krivulja c je periodicna s periodo L, ce za vsak t ∈ R veljac(t + L) = c(t), kjer L > 0, ter ce hkrati ni takega stevila L1, kjer 0 < L1 < L, da biza vsak t ∈ R veljalo c(t+ L1) = c(t) .
Ce ima krivulja c periodicno regularno parametrizacijo, potem je c sklenjena krivulja.Povezava med definiranima pojmoma je torej sledeca: vsaka periodicna parametrizi-rana krivulja je hkrati tudi sklenjena; nikakor pa ni vsaka parametrizacija sklenjene
6

krivulje tudi periodicna [2].
Poglejmo si nekaj primerov [26] najbolj znanih parametriziranih krivulj, ter raziscimonjihovo periodicnost in sklenjenost:
Primer 2.2.1 : Bernoullijeva lemniskata [29] je podana s funkcijo
c(t) = (a ·
√2 · cos(t)
sin2(t) + 1,a ·
√2 · cos(t) · sin(t)sin2(t) + 1
) .
Krivulja je periodicna s periodo 2π in zato hkrati tudi sklenjena.
Slika 3: Bernoullijeva lemniskata
Primer 2.2.2 : Tudi astroida [20] , ki je podana s funkcijo
c(t) = (cos3(t), sin3(t)) ,
je periodicna krivulja s periodo 2π in zato hkrati tudi sklenjena krivulja.
Primer 2.2.3 : Kardioida ali srcnica [27] je podana s funkcijo
c(t) = (a · (2 · cos(t)− cos(2t)), a · (2 · sin(t)− sin(2t))) .
Ponovno gre za periodicno krivuljo s periodo 2π in zato hkrati tudi za sklenjeno krivuljo.
7

Slika 4: Astroida
Slika 5: Kardioida - Srcnica
8

Primer 2.2.4 : Dvorogeljnik [22] , ki je podan s funkcijo
c(t) = (a · sin(t), cos2(t) · (2 + cos(t))
3 + sin2(t)) ,
je periodicna krivulja s periodo 2π in zato hkrati tudi sklenjena krivulja.
Slika 6: Dvorogeljnik
Primer 2.2.5 : Tudi za deltoido ali Steinerjevo krivuljo [21], ki je podana s funkcijo
c(t) = (2 · a · cos(t) + a · cos(2t), 2 · a · sin(t)− a · sin(2t)) ,
velja, da je periodicna krivulja s periodo 2π in zato hkrati tudi sklenjena krivulja.
9

Slika 7: Deltoida - Steinerjeva krivulja
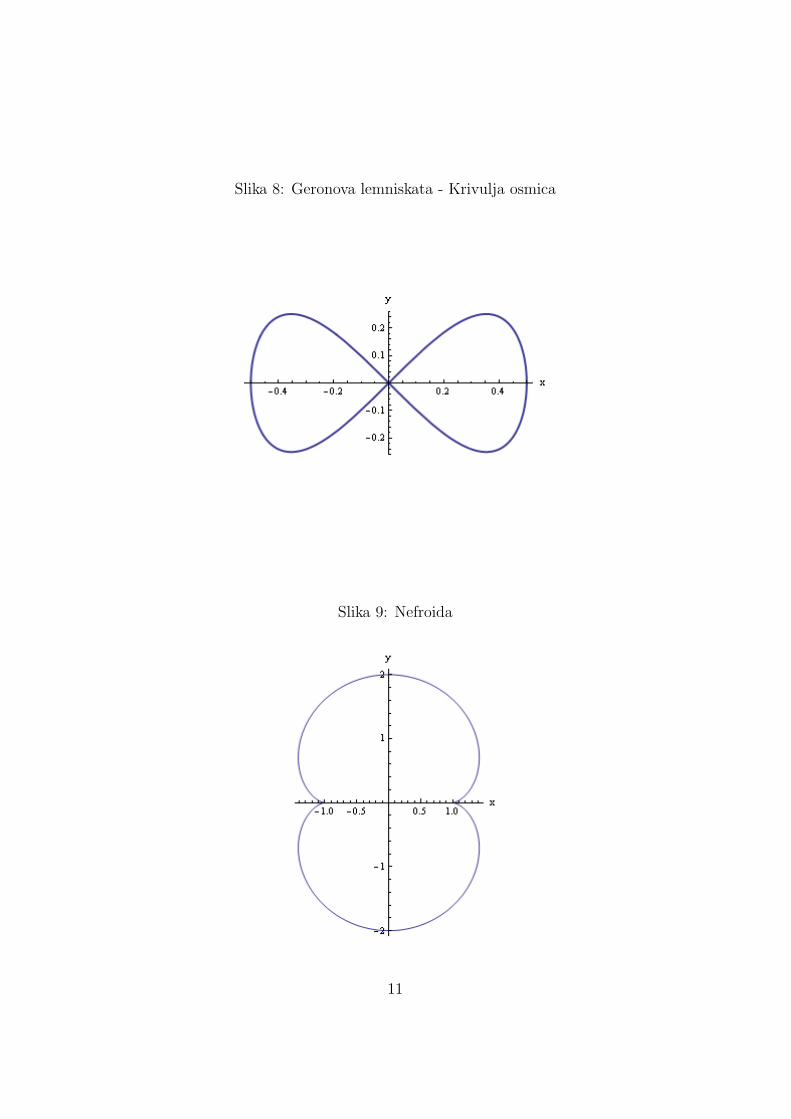
Primer 2.2.6 : Geronova lemniskata ali krivulja osmica [23] je podana s funkcijo
c(t) = (cos(t), sin(t) · cos(t)) .
Je periodicna krivulja s periodo 2π in zato hkrati tudi sklenjena krivulja.
Primer 2.2.7 : Podobno velja tudi za nefroido [25], ki jo podamo s funkcijo
c(t) = (a · (3 · cos(t)− cos(3t)), a · (3 · sin(t)− sin(3t))) .
Primer 2.2.8 : Metuljna krivulja [24] je se ena od stevilnih periodicnih in sklenjenihkrivulj s periodo 2π. Podana je s funkcijo
c(t) = (sin(t)·(ecos(t))−2·cos(4t)−sin5(t
12)), cos(t)·(ecos(t))−2·cos(4t)−sin5(
t
12))) .
Primer 2.2.9 : Tudi Vivianijeva krivulja [28] , ki jo podamo s funkcijo
c(t) = (a · (1 + cos(t)), a · sin(t), 2 · a · sin( t2)) ,
je periodicna krivulja s periodo 2π in zato hkrati tudi sklenjena krivulja.
10
Slika 8: Geronova lemniskata - Krivulja osmica
Slika 9: Nefroida
11

Slika 10: Metuljna krivulja
Slika 11: Vivianijeva krivulja
12

Za zgoraj raziskani lastnosti krivulj, periodicnost in sklenjenost, v splosnem velja le eno-stranska implikacija (iz periodicnosti krivulje lahko sklepamo na njeno sklenjenost). Vposebnem primeru - ce je krivulja parametrizirana z naravnim parametrom, pa veljaimplikacija tudi v obratni smeri (iz sklenjenosti krivulje lahko sklepamo na njeno peri-odicnost) [2].
Med sklenjenimi krivuljami se posebej izstopajo tako imenovane enostavno sklenjenekrivulje. Sklenjena krivulja je enostavno sklenjena, ce ima periodicno regularno para-metrizacijo c s taksno periodo L, da je c na intervalu [0, L) injektivna. To z drugimibesedami pomeni, da je krivulja c enostano sklenjena, ce nima, razen tocke v kateri jesklenjena, nobenih krizisc (mest, kjer bi preckala samo sebe) [2]. Enostavno sklenjenimkrivuljam vcasih pravimo tudi Jordanove krivulje.
Pojme enostavne, sklenjene, enostavno sklenjene krivulje, ponazarjajo naslednje skicevzorcnih krivulj:
Slika 12: Sklenjene / nesklenjene krivulje
13
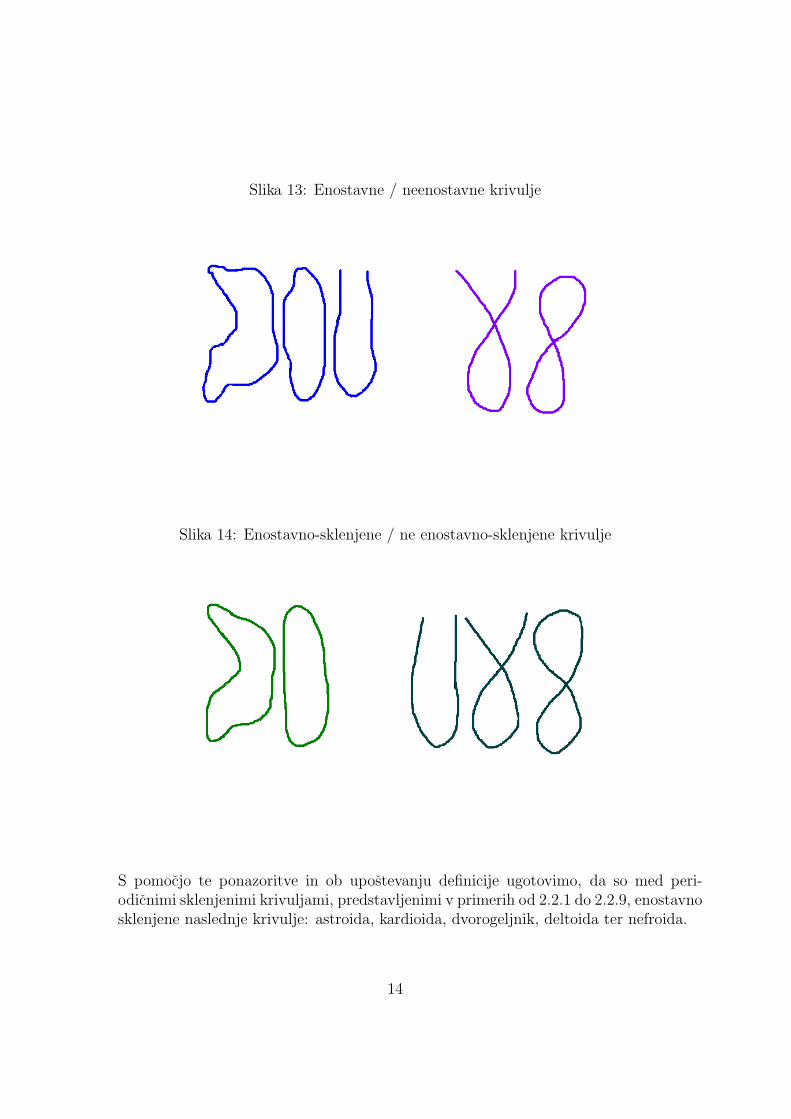
Slika 13: Enostavne / neenostavne krivulje
Slika 14: Enostavno-sklenjene / ne enostavno-sklenjene krivulje
S pomocjo te ponazoritve in ob upostevanju definicije ugotovimo, da so med peri-odicnimi sklenjenimi krivuljami, predstavljenimi v primerih od 2.2.1 do 2.2.9, enostavnosklenjene naslednje krivulje: astroida, kardioida, dvorogeljnik, deltoida ter nefroida.
14

3 KRIVULJE V RAVNINI IN PROSTORU
Krivulje se lahko med seboj razlikujejo po stevilnih lastnostih. Med pomembnejse la-stnosti sodijo ukrivljenost, konveksnost in zavozlanost krivulj. Obravnava teh lastnostije odvisna od tega, ali gre za ravninske krivulje ali za krivulje v prostoru.
3.1 Ukrivljenost ravninskih krivulj
Krivulje v ravnini R2 ⊂ R3 imajo to posebnost, da jim lahko definiramo vektorskopolje v R3, ki je pravokotno na to ravnino. V ta namen najprej definirajmo nekajpojmov. Premici, ki poteka skozi c(t0) in je njen smerni vektor ˙c(t0), pravimo tangentana krivuljo c v tocki c(t0). Predpostavimo, da je c : I → R2 ravninska krivulja enotskehitrosti. Potem je polje n(t), ki je pravokotno na to ravnino, po definiciji enako
n(t) :=
[0 −11 0
]· ˙c(t) ∈ R3 .
Takemu polju pravimo normalno polje. Vektorju, ki kaze v smeri normalnega polja,pravimo normalni vektor ali normala. Normalo dobimo tako, da vektor hitrosti ˙c(t)zavrtimo za pravi kot v nasprotni smeri urinega kazalca [2].
Ker je po predpostavki c krivulja parametrizirana z naravnim parametrom, velja⟨ ˙c(t), ˙c(t)⟩ = 1, pri cemer s simbolom ⟨ , ⟩ oznacujemo skalarni produkt dveh vektorjev.Ce to enacbo odvajamo, dobimo: ⟨¨c(t), ˙c(t)⟩+⟨ ˙c(t), ¨c(t)⟩ = 0 oziroma 2 · ⟨¨c(t), ˙c(t)⟩ =0. Ker sta vektorja ˙c(t) in ¨c(t) med seboj pravokotna, je vektor ¨c(t) ocitno veckratniknormale. Velja ¨c(t) = k(t) · n(t), pri cemer je omenjeni veckratnik k(t) funkcijak : I → R, ki ji pravimo ukrivljenost [2] oziroma natancneje fleksijska ukrivljenostkrivulje c. Fleksijska ukrivljenost nam pove, koliko krivulja odstopa od ravnosti, kotjo poznamo pri premici [32]. Krivulja c, parametrizirana z naravnim parametrom, jepremica natanko tedaj, ko je ¨c(t) = 0, oziroma, ko je k = 0. Sicer pa je ukrivljenostravninske krivulje lahko pozitivna ali negativna [2]. Pozitivna je na tistih mestih, kjerse krivulja upogne v levo (glede na smer potovanja), ter negativna tam, kjer se krivuljaupogne v desno (glede na smer potovanja).
In kako to ukrivljenost izracunamo v splosnem, torej tudi v primeru ko ne gre zakrivuljo, parametrizirano z naravnim parametrom ? Fleksijska ukrivljenost ravninskeregularno parametrizirane krivulje je enaka
k(t) =
∥∥∥ ˙c(t)× ¨c(t)∥∥∥(∥∥∥ ˙c(t)∥∥∥)3 .
15

Ce pa ob tem upostevamo se dejstvo, da je parametrizacija ravninske krivulje v splosnemenaka c(t) = (x(t), y(t), 0), ter je posledicno ˙c(t) = (x(t), y(t), 0) in ¨c(t) = (x(t), y(t), 0),potem se enacba za izracun fleksijske ukrivljenosti ravninske krivulje poenostavi:
k(t) =∥x(t) · y(t)− x(t) · y(t)∥√(x(t) · x(t) + y(t) · y(t))3
.
Na konkretnem primeru si poglejmo, kako se izracuna fleksijska ukrivljenost ravninskekrivulje.
Primer 3.1.1 :Izracunajmo, koliko znasa fleksijska ukrivljenost kroznice, ki je parametricno podanakot c(t) = (b · cos(t), b · sin(t), 0), kjer je b > 0 .
(1) Najprej izracunamo prvi in drugi odvod te parametrizacije:
˙c(t) = (−b · sin(t), b · cos(t), 0) ,¨c(t) = (−b · cos(t),−b · sin(t), 0) .
(2) Nato izracunamo skalarne produkte:
x(t) · y(t) = b2 · sin2(t) ,
x(t) · y(t) = −b2 · cos2(t) ,
x(t) · x(t) = b2 · sin2(t) ,
y(t) · y(t) = b2 · cos2(t) .
(3) Nazadnje vstavimo vse izracunane skalarne produkte v enacbo za ukrivljenost indobimo:
k(t) =
∥∥b2 · sin2(t)− (−b2 · cos2(t))∥∥√
(b2 · sin2(t) + b2 · cos2(t))3=
=
∥∥b2 · sin2(t) + b2 · cos2(t)∥∥√
(b2 · (sin2(t) + cos2(t))3=
=
∥∥b2 · (sin2(t) + cos2(t))∥∥√
(b2 · (1))3=
=∥b2 · (1)∥√
(b2)3=
=∥b2∥√b6
=
16

=
√b2 · b2b3
=
=b2
b3=
=1
b.
3.2 Konveksne ravninske krivulje
Med krivuljami v ravnini se posebej izstopajo tiste, ki so konveksne. Za ravninskokrivuljo pravimo da je konveksna [2], ce je vsaka od njenih tock taksna, da krivuljav celoti lezi na isti strani tangente skozi to tocko. V primeru, da je c ravninska kri-vulja, parametrizirana z naravnim parametrom, in n polje normale vzdolz c, potemje krivulja c konveksna v tocki c(t0), ce velja: ⟨c(t) − c(t0), n(t0)⟩ ≥ 0 za ∀ t ali pa⟨c(t) − c(t0), n(t0)⟩ ≤ 0 za ∀ t. Ce to posplosimo na celo krivuljo, pa velja [2]: rav-ninska krivulja c, parametrizirana z naravnim parametrom, s poljem normale n, jekonveksna ⇔ ko za ∀ t, t0 ∈ I velja ⟨c(t) − c(t0), n(t0)⟩ ≥ 0 ali pa za ∀ t, t0 ∈ I velja⟨c(t)− c(t0), n(t0)⟩ ≤ 0.
Pri enostavno sklenjenih ravninskih krivuljah je pogoj za konveksnost bolj preprost[2, 18]. Naj bo c : R → R2 enostavno sklenjena ravninska krivulja, parametrizirana znaravnim parametrom, ter naj bo k(t) njena (fleksijska) ukrivljenost. Potem je krivuljac konveksna ⇔ ko je k(t) ≥ 0 za ∀ t ∈ R ali pa k(t) ≤ 0 za ∀ t ∈ R. To preprostopomeni, da se konveksna enostavno sklenjena ravninska krivulja vedno ukrivlja v istosmer (ali vedno v desno ali pa vedno v levo). Prav tako pa za vsako enostavno sklenjenokonveksno krivuljo v ravnini velja tudi, da ima poljubna premica, ki ni mimobeznica,ali natancno 2 presecisci s taksno krivuljo, ali pa neskoncno mnogo tock v preseciscus taksno krivuljo. V slednjem primeru je cel odsek te premice del krivulje oziromakrivulja vsebuje del te premice. Najbolj znani enostavno sklenjeni konveksni krivulji vravnini sta kroznica in elipsa.
Oglejmo si tri primere ravninskih krivulj ter raziscimo, ali so konveksne.
Primer 3.2.1 : Krivulja fizola [4] na sliki (15) je tipicen primer konveksne krivulje, sajgre za enostavno sklenjeno krivuljo, ki se povsod ukrivlja v isto smer. Ima sledecoparametrizacijo:
c(t) = (1 + t2
t4 + t2 + 1,t · (1 + t2)
t4 + t2 + 1) .
17

Slika 15: Krivulja fizola - konveksna krivulja
Primer 3.2.2 : Epicikloida [38] (slika (16)) je primer nekonveksne krivulje, saj gre zaenostavno sklenjeno krivuljo, ki veckrat menja smer ukrivljanja. Podana je s funkcijo
c(t) = ((a+ b) · cos(t) + b · cos(a+ b
b · t), (a+ b) · sin(t) + b · sin(a+ b
b · t)) , kjer b > 0 .
Slika 16: Epicikloida - nekonveksna krivulja
18

Primer 3.2.3 : Triperesna deteljica [8], prikazana na sliki (17), je prav tako primernekonveksne krivulje, ki hkrati ni niti enostavno sklenjena. Podana je z enacbo
c(t) = (cos(3t) · cos(t), cos(3t) · sin(t)) .
Slika 17: Triperesna deteljica - nekonveksna krivulja
3.3 Zvezdaste mnozice
V ravnini so posebej zanimive zvezdaste mnozice. Z njimi je tesno povezana tudi takoimenovana lema o dvigu.
Za potrebe njenega definiranja moramo najprej obravnavati naslednjo lemo [2]:
Trditev 3.1 Naj bo krivulja c : [a, b] → R2 parametrizirana z naravnim parame-
trom. Potem obstaja taksna poljubnokrat odvedljiva funkcija ϑ : [a, b] → R, da velja:
˙c(t) = (cos(ϑ(t)), sin(ϑ(t))) .
Ce sta ϑ1 in ϑ2 dve taksni funkciji, potem se med seboj razlikujeta le za celostevilski
veckratnik stevila 2π, torej je v tem primeru ϑ1 = ϑ2 + k · 2π (kjer je k ∈ Z).
19

Stevilo ϑ(t) nam pove, koliksen je kot med vektorjem hitrosti ˙c(t) in x osjo. Ta kot jedolocen le do celostevilskega veckratnika stevila 2π natancno.
Ta lema je pomembna zato, ker nam pove, da je kot ϑ mozno izbrati kot zvezno in celogladko funkcijo spremenljivke t.
Dokaz leme [2]:(a) Predpostavimo, da je slika ˙c([a, b]) v celoti vsebovana v enem od naslednjih stirihpolkrogov:
SD = {(x, y) ∈ S1 ⊂ R2 ; x > 0} - desni polkrog ,
SL = {(x, y) ∈ S1 ⊂ R2 ; x < 0} - levi polkrog ,
SZG = {(x, y) ∈ S1 ⊂ R2 ; y > 0} - zgornji polkrog ,
SSP = {(x, y) ∈ S1 ⊂ R2 ; y < 0} - spodnji polkrog .
Slika 18: Levi / desni polkrog
20

Slika 19: Zgornji / spodnji polkrog
Sedaj bomo uporabili novo oznako ˙c = ( ˙c(1), ˙c
(2)), kjer zapis ˙c
(1)pomeni prvo koordi-
nato ˙c in zapis ˙c(2)
pomeni drugo koordinato ˙c.
Na primer, predpostavimo da je slika v SD. To pomeni, da za prvo koordinato ˙c velja
pogoj ˙c(1)
> 0 . Zato funkcija ϑ zadosca enakosti
˙c(2)(t)
˙c(1)(t)
=sin(ϑ(t))
cos(ϑ(t))= tg(ϑ(t)) .
Od tod sledi:
ϑ(t) = arctg
(˙c(2)(t)
˙c(1)(t)
)+ k · 2π , kjer k ∈ Z .
Tu je k konstanta, saj sicer funkcija ϑ ne bi bila zvezna. Iz enacbe razberemo, da je ϑgladka funkcija. Ce je podana zacetna vrednost ϑ(a), potem sta k in posledicno tudiϑ enolicno dolocena. Podobno pokazemo tudi v ostalih treh primerih.
(b) Opustimo pogoj, da mora biti slika ˙c([a, b]) v celoti vsebovana v enem od stirih pol-krogov. Kompaktni interval [a, b], kjer je a = t0 < t1 < · · · < tm = b, razdelimo tako,da je vsak ˙c([ti, ti+1]) vsebovan v enem od stirih polkrogov. Ce si izberemo ϑ(a), gledena (a) del dokaza dobimo gladko funkcijo ϑ : [a, t1] → R z zeljenimi lastnostmi. Zatoobstaja ϑ(t1), (a) del dokaza pa nam zagotavlja obstoj gladke funkcije ϑ : [a, t2] → R.
21

To induktivno nadaljujemo in na koncu dokazemo obstoj gladke funkcije ϑ : [a, b] → R.
Edina izbira, ki smo jo tekom dokaza privzeli, je bila dolocitev zacetne vrednosti ϑ(a).Le ta je dolocena do celostevilskega veckratnika stevila 2π natancno. Zato je tudivrednost funkcije ϑ dolocena do celostevilskega veckratnika stevila 2π natancno.
�
Sedaj lahko definiramo prej omenjene mnozice.
Definicija 3.2 (Zvezdasta mnozica) Naj bo X ⊂ Rn in x0 ∈ X. Potem za
mnozico X pravimo, da je zvezdasta [2] glede na tocko x0, ce za vsako tocko x ∈ X
velja, da je daljica xx0 v celoti vsebovana v X, torej ce za vsak t ∈ [0, 1] velja, da je
t · x+ (1− t) · x0 ∈ X .
Povedano drugace: Mnozica X ⊂ Rn je zvezdasta, ce obstaja taksna tocka x0 ∈ X,
da za vsako tocko x ∈ X velja, da je daljica xx0 v celoti vsebovana v X.
Primeri konveksnih zvezdastih mnozic [15]: vsaka premica v Rn, vsaka ravnina v Rn,krog, kvadrat, pravokotnik, trikotnik, pravilni konveksni petkotnik, pravilni konveksnin-kotnik, . . .
Primeri nekonveksnih zvezdastih mnozic: trikraka zvezda, peterokraka zvezda,sesterokraka zvezda (slika (20)), sedmerokraka zvezda, . . .
Primeri mnozic, ki niso zvezdaste [15]: vsaka premica, ki ji odstranimo eno od tock,vsaka ravnina, ki ji odstranimo eno od tock, kolobar, torus, . . .
22

Slika 20: Sesterokraka zvezda - primer zvezdaste mnozice
Se pomembnejsa od prej omenjene leme je lema o dvigu [2]:
Trditev 3.3 (Lema o dvigu) Naj bo X ⊂ Rn zvezdasta mnozica glede na tocko
x0. Naj bo e : X → S1 ⊂ R2 zvezna funkcija. Potem obstaja taksna zvezna funkcija
ϑ : X → R, da velja:
e(x) = (cos(ϑ(x)), sin(ϑ(x))) za ∀ x ∈ X .
Funkcija ϑ je enolicno dolocena, ce je podana vrednost ϑ(x0) = ϑ0 .
Dokaz leme o dvigu [2]:(a) Najprej dokazimo lemo na primeru, ko je n = 1, X = [0, 1] in x0 = 0. Tedaj je lemao dvigu pravzaprav predhodno obravnavana lema z eno samo razliko ( ˙c je nadomescenz e). V tem primeru predpostavljamo le, da je funkcija e zvezna, zato je tudi ϑ nasplohle zvezna, ne pa nujno tudi gladka funkcija.
Lemo o dvigu dokazemo tako, da interval [0, 1] najprej razbijemo na manjse podinter-vale, ki so glede na e, vsak zase razporejeni v enega od stirih polkrogov. Tedaj lahkoϑ eksplicitno zapisemo z uporabo funkcij arctg in arcctg. Tako je ϑ enolicno dolocenaz zacetno vrednostjo ϑ(0) in pogojem zveznosti.
23

(b) Sedaj naj bo X ⊂ Rn splosna zvezdasta mnozica in x0 ∈ X. Naj bo x ∈ X. Kerje mnozica X zvezdasta, je daljica xx0 v celoti vsebovana v X, zato lahko definiramonaslednjo preslikavo:
ex : [0, 1] → S1 , ex(t) := e(t · x+ (1− t) · x0) .
Glede na (a) del dokaza obstaja natanko ena zvezna preslikava ϑx : [0, 1] → R z zacetnovrednostjo ϑx(0) = ϑ0 in z vrednostjo ex(t) = (cos(ϑx(t)), sin(ϑx(t))). Ce res obstajapreslikava ϑ, kot to trdi lema o dvigu, potem iz enolicnosti ϑx sledi naslednja zveza:
ϑx(t) = ϑ(t · x+ (1− t) · x0) .
V posebnem primeru velja tudi ϑ(x) = ϑx(1). S tem smo dokazali, da je ϑ res enolicnodolocena.
(c) Sedaj moramo pokazati se, da taksna preslikava ϑ zares obstaja.
Naj bo ϑ(x) := ϑx(1). Potem velja:
(cos(ϑ(x)), sin(ϑ(x))) = (cos(ϑx(1)), sin(ϑx(1))) = ex(1) = e(x)
ter ϑ(x0) = ϑ0.
Preostane nam se, da preverimo, ali je ϑ : X → R res zvezna preslikava. V ta namennaj bo x ∈ X in ε > 0. Naj bo 0 = t0 < t1 < · · · < tN = 1 taksno razbitje intervala[0, 1] na podintervale, da ex, omejen na podintervalu [ti, ti+1], vedno lezi v enem odstirih polkrogov. Zaradi zveznosti preslikave e, za vsak y ∈ X, ki je dovolj blizu x,velja:
∥ ex(t)− ey(t) ∥< ε za vsak t ∈ [0, 1] ,
pri cemer z ∥ ∥ oznacujemo normo oziroma dolzino vektorja. Za dovolj majhne ε je ey,omejen na podintervalu [ti, ti+1], vedno v celoti vsebovan v istem izmed stirih odprtihpolkrogov kot ex.
To pomeni, da lahko tako za ey, kot tudi za ex, uporabimo isto razbitje intervala [0, 1].Z uporabo indukcije na N podintervalih zlahka pokazemo, da v primeru levega oziromadesnega polkroga velja:
ϑx(t) = arctg
(e(2)x (t)
e(1)x (t)
)+ 2kπ in ϑy(t) = arctg
(e(2)y (t)
e(1)y (t)
)+ 2kπ ,
kjer je k ∈ Z enak za x in y. Pri tem uporabljamo oznako e = (e(1), e(2)), kjer tako kotpri dokazu leme 3.1 , zapis e(1) pomeni prvo koordinato e, zapis e(2) pa drugo koordi-nato e.
24

Podobno v primeru zgornjega oziroma spodnjega polkroga velja:
ϑx(t) = arcctg
(e(1)x (t)
e(2)x (t)
)+ 2kπ in ϑy(t) = arcctg
(e(1)y (t)
e(2)y (t)
)+ 2kπ .
V posebnem primeru, glede na to, ali gre za levi ali desni polkrog, oziroma za zgornjiali spodnji polkrog, velja:
ϑ(x)− ϑ(y) = arctg
(e(2)(x)
e(1)(x)
)− arctg
(e(2)(y)
e(1)(y)
)oziroma
ϑ(x)− ϑ(y) = arcctg
(e(1)(x)
e(2)(x)
)− arcctg
(e(1)(y)
e(2)(y)
).
Ker so preslikave e, arctg in arcctg zvezne, je zvezna tudi preslikava ϑ.
�
3.4 Ukrivljenost krivulj v prostoru
Krivulji c : I → R3 pravimo prostorska krivulja. Pri krivuljah v prostoru za razliko odravninskih krivulj locimo vec vrst ukrivljenosti: fleksijsko ukrivljenost, torzijsko ukri-vljenost, totalno ukrivljenost [2].
Najprej definirajmo fleksijsko ukrivljenost. Naj bo c : I → R3 prostorska krivuljaparametrizirana z naravnim parametrom. Podobno kot pri ravninskih krivuljah tuditu funkciji k : I → R, ki je definirana v nadaljevanju, pravimo fleksijska ukrivljenostoziroma upognjenost [36] krivulje c. Enako kot za krivulje v R2 tudi tu velja, da namfleksijska ukrivljenost k(t) pove, koliko je krivulja c upognjena oziroma koliko odstopaod ravnosti premice. Prostorska krivulja c parametrizirana z naravnim parametrom jepremica ⇔ ko je ¨c(t) = 0 oziroma ko je k(t) = 0 za ∀ t ∈ I. Za razliko od ravnine jeukrivljenost v prostoru vedno pozitivna, torej vedno velja k(t) ≥ 0. O smeri upogibakrivulje (v levo ali v desno) tu ne govorimo vec [2]. Kako to ukrivljenost definiramo ?
Fleksijska ukrivljenost [6] regularno parametrizirane krivulje v prostoru je enaka
k(t) =
∥∥∥ ˙c(t)× ¨c(t)∥∥∥(∥∥∥ ˙c(t)∥∥∥)3 .
25

Ce pa je prostorska krivulja parametrizirana z naravnim parametrom, pa se ta enacbapoenostavi in velja:
k(t) =∥∥∥¨c(t)∥∥∥ .
Za razliko od ravninskih krivulj, kjer govorimo le o eni vrsti ukrivljenosti, je za kri-vulje v prostoru poleg fleksijske ukrivljenosti znacilna tudi tako imenovana torzijskaukrivljenost [2, 33]. Naj bo c : I → R3 prostorska krivulja parametrizirana z naravnimparametrom in naj bo t ∈ I tak, da k(t) = 0. Potem vrednosti
τ(t) =( ˙c(t), ¨c(t),
...c (t))
(∥∥∥ ˙c(t)× ¨c(t)
∥∥∥)2pravimo torzijska ukrivljenost oziroma torzija oziroma zvitost [36] krivulje c v tocki t,pri cemer s
...c (t) oznacujemo trojni odvod c(t), z ( ˙c(t), ¨c(t),
...c (t)) pa mesani produkt
treh vektorjev. Torzijska ukrivljenost τ(t) nam pove, kako mocno je krivulja c zvitaoziroma kako ostro v dani tocki t v prostoru zavija ven iz svoje ravnine [33]. Krivuljaje ravninska ⇔ ko je njena torzijska ukrivljenost povsod enaka 0, torej ko je τ(t) = 0za ∀ t ∈ I.
V prostoru tvorijo ortogonalno bazo trije med seboj pravokotni vektorji. Naj boc : I → R3 parametrizirana krivulja v prostoru in t0 ∈ I tak, da k(t0) = 0. Potemortogonalno bazo [12, 37] tvorijo naslednji vektorji:
T (t0) =˙c(t0)∥∥∥ ˙c(t0)∥∥∥ ,
N(t0) =˙c(t0)× ¨c(t0)∥∥∥ ˙c(t0)× ¨c(t0)
∥∥∥ ×˙c(t0)∥∥∥ ˙c(t0)∥∥∥ ,
B(t0) =˙c(t0)× ¨c(t0)∥∥∥ ˙c(t0)× ¨c(t0)
∥∥∥ .
Vektorju T (t0) pravimo tangencialni vektor ali tangenta, vektorju N(t0) normalni vek-
tor ali normala, vektorju B(t0) pa binormalni vektor ali binormala krivulje c v tocki t0.
Tangenta T (t0) kaze v smeri gibanja po krivulji c v tocki t0, normala N(t0) predstavlja
hitrost spreminjanja tangente in kaze v smeri tega spreminjanja, binormala B(t0) paje vedno pravokotna na ravnino, v kateri lezita tangenta in normala [12, 37]. Med temitremi vektorji veljajo naslednje zveze:
N(t0) = B(t0)× T (t0) ,
T (t0) = N(t0)× B(t0) ,
B(t0) = T (t0)× N(t0) .
26

Ce pa je prostorska krivulja c parametrizirana z naravnim parametrom in je t0 ∈ I tak,da k(t0) = 0, pa vektorji tvorijo ortonormirano bazo (saj niso le ortogonalni, pac patudi enotski) in se izrazanje teh vektorjev nekoliko poenostavi:
T (t0) = ˙c(t0) ,
N(t0) =¨c(t0)∥∥∥¨c(t0)∥∥∥ × ˙c(t0) ,
B(t0) =¨c(t0)∥∥∥¨c(t0)∥∥∥ .
Ortonormirani bazi (T (t0), N(t0), B(t0)) pravimo Frenetova baza krivulje c v tocki t0.
Upognjenost in zvitost krivulje sta povezani s Frenetovo bazo preko tako imenovanihFrenetovih formul [2, 12, 37].
Naj bo c : I → R3 krivulja v prostoru, parametrizirana z naravnim parametrom. Najza krivuljo c velja k(t) ≥ 0 za ∀ t ∈ I. Potem za krivuljo c veljajo naslednje Frenetoveformule :
˙T (t) = k(t) · N(t) ,˙N(t) = −k(t) · T (t) + τ(t) · B(t) ,˙B(t) = −τ(t) · N(t) .
Vektorji T (t0), N(t0) in B(t0) spreminjajo svojo smer vzdolz krivulje c.
Ukrivljenosti k(t) in τ(t) povesta, kako hitro se spreminjata smeri vektorja T (t0) ozi-
roma B(t0) vzdolz krivulje c.
Fleksijska ukrivljenost je v resnici hitrost s katero se suce tangenta, torzijska ukrivlje-nost pa hitrost sukanja binormale.
V povezavi s krivuljami v prostoru locimo tri ravnine: pritisnjeno, normalno in rekti-fikacijsko ravnino [2, 12, 37].
Pritisnjena ali oskulacijska ravnina je ravnina, ki vsebuje tangento in normalo ter jepravokotna na binormalo, njena enacba v tocki c(t) pa se glasi:
b(t) · ((x, y, z)− c(t)) = 0 , kjer je b(t) = ˙c(t)× ¨c(t) .
27

Normalna ravnina je ravnina, ki vsebuje normalo in binormalo ter je pravokotna natangento in ima v tocki c(t) enacbo:
t(t) · ((x, y, z)− c(t)) = 0 , kjer je t(t) = ˙c(t) .
Ravnini, ki vsebuje tangento in binormalo ter je pravokotna na normalo, pa pravimorektifikacijska ravnina. Njena enacba v tocki c(t) se glasi:
n(t) · ((x, y, z)− c(t)) = 0 , kjer je n(t) = b(t)× t(t) .
Vektorji t(t), n(t) in b(t) so tesno povezani z vektorji Frenetove baze, in sicer na nasle-dnji nacin:
T (t) =t(t)∥∥t(t)∥∥ ,
B(t) =b(t)∥∥∥b(t)∥∥∥ ,
N(t) =n(t)
∥n(t)∥.
Na konkretnem primeru si poglejmo, kako izracunamo upognjenost in zvitost krivulje vprostoru ter kako poiscemo Frenetovo bazo in enacbe vseh treh ravnin v tocno dolocenitocki krivulje.
Primer 3.4.1 :Imejmo krivuljo
c(t) = (t,1
t2 + 1, t) , kjer t ∈ R .
Poiscimo enacbe vseh treh ravnin, izracunajmo fleksijsko in torzijsko ukrivljenost terpoiscimo Frenetovo bazo v tocki T = (0, 1, 0).
(1) Najprej ugotovimo, kateremu parametru t pripada tocka T . Izenacimo
(t,1
t2 + 1, t) = (0, 1, 0) .
Vidimo, da bo enacaj veljal le, ce bo t = 0.
28

(2) Nato izrazimo prvi, drugi in tretji odvod c(t):
˙c(t) = (1,− 2t
(t2 + 1)2, 1) ,
¨c(t) = (0,8t2
(t2 + 1)3− 2
(t2 + 1)2, 0) ,
...c (t) = (0,
24t
(t2 + 1)3− 48t3
(t2 + 1)4, 0) .
(3) Te tri odvode tudi izracunamo v tocki T oziroma t = 0:
˙c(0) = (1, 0, 1) ,¨c(0) = (0,−2, 0) ,...c (0) = (0, 0, 0) .
(4) Potem izracunamo vektorje t(t), n(t) in b(t):
t(0) = ˙c(0) = (1, 0, 1) ,
b(0) = ˙c(0)× ¨c(0) = (1, 0, 1)× (0,−2, 0) = (2, 0,−2) ,
n(0) = b(0)× t(0) = (2, 0,−2)× (1, 0, 1) = (0,−4, 0) .
(5) Sedaj lahko ugotovimo enacbe vseh treh ravnin:
Pritisnjena ravnina:
(2, 0,−2) · ((x, y, z)− (0, 1, 0)) = 0
(2, 0,−2) · (x, y − 1, z) = 0
2x− 2z = 0
x = z
Normalna ravnina:
(1, 0, 1) · ((x, y, z)− (0, 1, 0)) = 0
(1, 0, 1) · (x, y − 1, z) = 0
x+ z = 0
x = −z
29

Rektifikacijska ravnina:
(0,−4, 0) · ((x, y, z)− (0, 1, 0)) = 0
(0,−4, 0) · (x, y − 1, z) = 0
4− 4y = 0
y = 1
(6) Nato izracunamo fleksijsko in torzijsko ukrivljenost krivulje v tocki T oziroma t = 0.
V ta namen najprej izracunamo se mesani produkt:
( ˙c(0), ¨c(0),...c (0)) =
...c (0) · ( ˙c(0)× ¨c(0)) =
= (0, 0, 0) · ((1, 0, 1)× (0,−2, 0)) =
= (0, 0, 0) · (2, 0,−2) =
= 0 .
Upognjenost krivulje je enaka:
k(0) =
∥∥∥ ˙c(0)× ¨c(0)∥∥∥
(∥∥∥ ˙c(0)∥∥∥)3 =
=∥(1, 0, 1)× (0,−2, 0)∥
(∥(1, 0, 1)∥)3=
=∥(2, 0,−2)∥
(√2)3
=
=
√8
2 ·√2=
=2 ·
√2
2 ·√2=
= 1 .
30

Zvitost krivulje je enaka:
τ(0) =( ˙c(0), ¨c(0),
...c (0))
(∥∥∥ ˙c(0)× ¨c(0)
∥∥∥)2 =
=0
(∥(2, 0,−2)∥)2=
=0
(√8)2
=
=0
8=
= 0 .
(7) Nazadnje poiscemo se Frenetovo bazo v tocki T oziroma t = 0:
Tangenta:
T (0) =t(0)∥∥t(0)∥∥ =
=(1, 0, 1)
∥(1, 0, 1)∥=
=(1, 0, 1)√
2=
= (
√2
2, 0,
√2
2)
Binormala:
B(0) =b(0)∥∥∥b(0)∥∥∥ =
=(2, 0,−2)
∥(2, 0,−2)∥=
=(2, 0,−2)√
8=
= (
√2
2, 0,−
√2
2)
31

Normala:
N(0) =n(0)
∥n(0)∥=
=(0,−4, 0)
∥(0,−4, 0)∥=
=(0,−4, 0)√
16=
=(0,−4, 0)
4=
= (0,−1, 0)
Prostorske krivulje imajo poleg fleksijske in torzijske ukrivljenosti tudi tako imenovanototalno ukrivljenost. Pa jo definirajmo. Naj bo c periodicna, sklenjena krivulja vprostoru, parametrizirana z naravnim parametrom, s periodo L. Potem ukrivljenosti
K(c) =
∫ L
0
k(t) dt
pravimo totalna ukrivljenost [2, 17, 19] krivulje c.
Za vsako sklenjeno krivuljo velja, da je njena totalna ukrivljenost vedno enaka celoste-vilskemu veckratniku stevila 2π, ki mu pravimo indeks. Torej, K(c) sklenjene krivuljeje lahko 2π, 4π, 6π, 8π, . . . Totalna ukrivljenost je povezana z upognjenostjo in zvitostjokrivulje c na naslednji nacin:
K(c) =√(k(t))2 + (τ(t))2 .
Enostavno sklenjenim krivuljam v prostoru pravimo tudi vozli. Eden od pomembnihpojmov v teoriji vozlov [1] je tako imenovano mostovno stevilo. Za definiranje tegapojma je najprej potrebnih nekaj drugih definicij. Katerokoli sklenjeno krivuljo vprostoru lahko projiciramo na ravnino. Krizisce projekcije vozla je vsako mesto naprojekciji, kjer vozel precka samega sebe. Nadvoz je del vozla, ki gre cez vsaj enokrizisce in nikoli pod njim. Maksimalen nadvoz je nadvoz, ki se ga ne da vec podaljsati;torej nadvoz, ki se na obeh straneh konca tako, da gre pod krizisce (glej sliko (21)).Mostovno stevilo projekcije je stevilo maksimalnih nadvozov v projekciji. Mostovnostevilo vozla oziroma mostovno stevilo sklenjene krivulje µ(c) pa je najmanjse mostovnostevilo projekcije izmed vseh moznih projekcij iste krivulje c.
32

Slika 21: Maksimalen nadvoz
Slika 22: Sklenjena krivulja z mostovnim stevilom 5
Slika 23: Sklenjena krivulja z mostovnim stevilom 6
33

Slika 24: Sklenjena krivulja z mostovnim stevilom 7
To pa ni edini mozni nacin definiranja mostovnega stevila. Mostovno stevilo [2] lahkovpeljemo tudi brez poznavanja teorije vozlov.
V ta namen moramo najprej definirati stevilo lokalnih maksimumov krivulje c.
Definicija 3.4 (Stevilo lokalnih maksimumov krivulje) Naj bo c : R → R3
periodicna parametrizirana krivulja v prostoru s periodo L in naj bo e ∈ R3 enotski
vektor. Potem je stevilo lokalnih maksimumov krivulje c v smeri vektorja e enako:
µ(c, e) = |{lok. maksimum funkc. R → R, t → ⟨c(t), e⟩ v [0, L)}| ∈ N ∪ {∞} .
Na podlagi te definicije vpeljemo tudi definicijo mostovnega stevila krivulje.
Definicija 3.5 (Mostovno stevilo krivulje) V tem primeru je mostovno stevilo
krivulje c enako:
µ(c) = minµ(c, e) ,
pri cemer gre za minimum po vseh e ∈ S2. Za mostovno stevilo so mozne zgolj
naslednje vrednosti: µ(c) = 1 ali µ(c) = 2 ali µ(c) = 3 ali µ(c) = 4 ali . . .
34

Mostovno stevilo je tesno povezano s totalno ukrivljenostjo krivulje. V [2] je na strani76 dokazana naslednja trditev.
Trditev 3.6 Naj bo c sklenjena prostorska krivulja. Potem velja:
K(c) ≥ 2π · µ(c) .
Na strani 77 pa je v istem viru dokazan naslednji zelo uporaben izrek, ki nam pove,koliko se mora prostorska krivulja ukrivljati, da bi postala sklenjena.
Trditev 3.7 (Fenchelov izrek) Naj bo c enostavno sklenjena prostorska krivulja.
Potem velja:
K(c) ≥ 2π .
Enakost K(c) = 2π velja natanko tedaj, ko je c konveksna ravninska krivulja.
3.5 Zavozlanost krivulj v prostoru
Ena od pomembnih lastnosti prostorskih krivulj je tudi njihova zavozlanost. Toda sepred definiranjem tega pojma moramo najprej vpeljati nekaj drugih definicij.
Naj bosta M in N dva metricna prostora. Preslikava h : M → N je homeomorfizem,ce je h zvezna in bijektivna ter ce hkrati obstaja taka zvezna preslikava g : N → M ,da velja g ◦ f = id in f ◦ g = id, kjer je ◦ oznaka za kompozitum dveh preslikav.To preprosto pomeni, da sta dva geometrijska prostora homeomorfna, ce lahko enegapreoblikujemo v drugega zgolj z raztegovanjem in krivljenjem, ne pa tudi z luknjanjemali trganjem. Na primer, poljuben zapolnjen trikotnik je homeomorfen poljubnemu za-polnjenemu pravokotniku, oba pa sta homeomorfna poljubnemu zapolnjenemu krogu.Toda, tako poljuben zapolnjen trikotnik, kot tudi poljuben zapolnjen pravokotnik, ni-sta homeomorfna poljubni kroznici.
Izotopija [2] prostora R3 je taksna zvezna preslikava φ : [0, 1]×R3 → R3, da je za vsakoizbrano tocko t ∈ [0, 1], preslikava φ(t, ·) : R3 → R3 homeomorfizem. Dve enostavnosklenjeni prostorski krivulji c0 in c1 sta ambientno izotopni, ce obstaja taksna izotopijaφ prostora R3, da zanjo velja: φ(0, x) = x za ∀x ∈ R3 ter φ(1, c0(I)) = c1(I).
35

Ambientna izotopija porodi ekvivalencno relacijo na mnozici enostavno sklenjenih kri-vulj v prostoru. Vsak posamezen ambientno izotopni razred enostavno sklenjenih pro-storskih krivulj imenujemo vozel [2].
Za enostavno sklenjeno prostorsko krivuljo pravimo, da je nezavozlana, ce je ta krivu-lja ambientno izotopna enostavno sklenjeni ravninski krivulji. V nasprotnem primerupravimo, da je taka krivulja zavozlana. To z drugimi besedami pomeni, da je enostavnosklenjena prostorska krivulja nezavozlana, ce se jo da ukriviti v enostavno sklenjenoravninsko krivuljo, ne da bi v procesu preoblikovanja to krivuljo kakorkoli presekali [2].
Poglejmo si nekaj primerov krivulj in se prepricajmo, ali so zavozlane ali nezavozlane.
Primer 3.5.1 : Krivulja na sliki (25) je nezavozlana, saj jo z zasukoma zgornje in spodnjezanke za π okoli navpicne osi ukrivimo v kroznico (trivialni vozel), ki je enostavnosklenjena ravninska krivulja in ima enacbo c(t) = (r · cos(t), r · sin(t)).
Slika 25: Prvi primer nezavozlane krivulje
Primer 3.5.2 : Slika (26) prikazuje vozel deteljico [16]. Gre za krivuljo, ki je podana sfunkcijo
c(t) = (r · cos(2t), r · sin(2t),− sin(−3t)) ,
kjer je r = cos(−3t) + 2 in 0 < t < 2π. Je primer zavozlane krivulje, saj se jo ne dapreoblikovati v enostavno sklenjeno ravninsko krivuljo, ne da bi pri tem spremenili enood krizisc in tako posledicno krivuljo pretrgali (presekali).
36

Slika 26: Vozel deteljica - prvi primer zavozlane krivulje
Primer 3.5.3 : Na sliki (27) je prikazana nezavozlana krivulja. Od zavozlane krivuljes prejsnjega primera se razlikuje v dveh kriziscih. Krivuljo lahko preoblikujemo vtrivialni vozel c(t) = (r · cos(t), r · sin(t)) tako, da sprednjo zanko zasukamo okolinavpicne osi za π v desno, zadnjo zanko pa zasukamo okoli vodoravne osi za π v smerinavzdol.
Slika 27: Drugi primer nezavozlane krivulje
37

Primer 3.5.4 : Krivulja na sliki (28) je zavozlana, saj bi jo lahko preoblikovali v trivialnivozel c(t) = (r · cos(t), r · sin(t)) le, ce bi spremenili enega od krizisc, za kar pa bi bilopotrebno krivuljo pretrgati.
Slika 28: Drugi primer zavozlane krivulje
38

4 FARY-MILNORJEV IZREK
Fary-Milnorjev izrek je izjemno pomemben, saj nam pove, koliko se mora prostorskakrivulja ukrivljati, da bi postala zavozlana. Kot nam ze ime pove, sta izrek odkrilaJohn Milnor in Istvan Fary. Ugotovila sta ga ob priblizno istem casu, vendar neodvisnoin loceno eden od drugega.
4.1 Istvan Fary, John Milnor
Istvan Fary [3, 13] je bil matematik madzarskega rodu. Rodil se je 30.6.1922 v majhnivasici Gyula blizu jugovzhodne meje z Romunijo. Na univerzi v Budimpesti je pridobilmagistrski naziv, nato pa je na univerzi v Szegedu leta 1947 se doktoriral. Za tem seje preselil v Pariz, kjer se je lotil raziskovanja in priprave se enega doktorata, ki ga jezagovarjal leta 1955. Tako je zacel poucevati na univerzi v Montrealu v Kanadi. Tuje spoznal in se kasneje tudi porocil s Therese, s katero je imel hcerko Kataline. Leta1958 se je prikljucil tamkajsnjemu oddelku za matematiko in leta 1962 postal redniprofesor. Umrl je 2.11.1984 v svojem domu, v El Cerrito v Kaliforniji (ZDA).
Slika 29: Istvan Fary
Njegovo zgodnje matematicno delo je bilo vezano na podrocje geometrije. Leta 1948je dokazal Faryjev izrek [10], ki pravi, da je vsak graf v ravnini mozno narisati brezkrizisc oziroma prehodov, tako da so njegovi robovi daljice. To z drugimi besedamipomeni, da risanje robov grafa v obliki krivulj, v nasprotju z risanjem robov v oblikidaljic, ne omogoca risanja grafov visjih razredov. Leto kasneje pa je dokazal njegovnajpomembnejsi izrek, Fary-Milnorjev izrek.
39

Sredi 50. let 20. stoletja je svoje zanimanje usmeril v algebro, se zlasti v algebrajskotopologijo. Tako kot stevilni drugi madzarski matematiki, je tudi Fary napisal vecpomembnih clankov, vezanih na tematiko geometrijske oblike konveksnih teles. V za-dnjih letih svojega zivljenja se je ukvarjal predvsem z algebrajskimi nizi. Njegov zadnjiobjavljen clanek pa nakazuje na preusmeritev njegove pozornosti na novo podrocje -kombinacijo verjetnosti in geometrije [3, 13].
Priznani in za svoje delo veckrat nagrajeni ameriski matematik John Willard Milnor[7, 14, 35] se je rodil 20.2.1931 v Orange, New Jersey, ZDA. Obiskoval je univerzo vPrincetonu, kjer je leta 1951 tudi diplomiral. V naslednjih treh letih je dokoncal dok-torsko nalogo z naslovom Izotopija Spletov ter postal doktor znanosti. Po dokoncanemstudiju je ostal na Princetonski univerzi, kjer se je sprva zaposlil kot asistent, doklerni leta 1960 postal profesor. Porocil se je z Duso McDuff, prav tako profesorico mate-matike v srednji soli Barnard. Poleg tega, da je John delal kot profesor, je postal tudiclan Instituta za napredne znanosti v Princetonu. Leta 1989 se je pridruzil fakultetiv Stony Brooku, kjer je se danes zaposlen kot profesor. Hkrati vodi tudi Institut zamatematicne znanosti.
Slika 30: John Milnor
Njegovo delo obsega podrocja topologije, geometrije in celo algebre. Milnorjev najvecjidosezek sega v leto 1956, ko je dokazal obstoj 7-dimenzionalnih sfer z nestandardnodiferencialno strukturo. To odkritje je vodilo v razvoj novega matematicnega podrocja,diferencialne topologije. Sicer pa je John Milnor najbolj znan po odkritju eksoticnihsfer in Fary-Milnorjevega izreka. Leta 1962 je prejel prvo izmed stevilnih nagrad, insicer Fieldsovo medaljo. Gre za mednarodno medaljo za izjemna odkritja na podrocjumatematike, ki so mu jo podelili za njegovo delo na podrocju diferencialne topologije.
40

To medaljo podeljujejo vsaka 4 leta na Mednarodnem kongresu matematikov in veljaza najvecjo cast, ki lahko v zivljenju doleti matematika. Tej nagradi so sledile sestevilne druge. Leta 1967 je prejel Nacionalno medaljo za znanost, ki jo podeljujeameriski predsednik. Leta 1982 so mu podelili nagrado Leroy P Steela za prispevkek stevilnim raziskavam. Sledile so se Wolfova nagrada za matematiko (1989), LeroyP Steelova nagrada za matematicni prirocnik (2004) ter Leroy P Steelova nagrada zazivljenjsko delo (2011). Istega leta je prejel tudi zelo znano in cenjeno Abelovo nagradoza pionirska odkritja v topologiji, geometriji in algebri [7, 14, 35].
4.2 Izrek
Leta 1949 sta Fary in Milnor neodvisno eden od drugega odkrila in dokazala slavniFary-Milnorjev izrek [2, 5, 9]. Istvan Fary je bil tedaj star 27 let, John Milnor pa jedopolnil komaj 18 let.
Se posebej je zanimiva anekdota o tem, kako je do svojega odkritja prisel slednji. JohnMilnor je tedaj kot mlad student na univerzi v Princetonu obiskoval predavanja o dife-rencialni geometriji, ki jih je vodil tedanji profesor Al Tucker. Nekega dne je profesorna predavanjih predstavil zbirko tedaj se odprtih problemov diferencialne geometrije.John je zamudil zacetek teh predavanj in zmotno mislil, da mora predstavljene problemeresiti za domaco nalogo, ki se je zdela nenavadno zahtevna. To zgreseno prepricanje jeMilnorja vodilo, da je doma resil problem Karola Borsuka. Resitev tega problema pani bilo nic drugega kot ravno Fary-Milnorjev izrek.
In kaj pravi ta izrek [2] ?
Trditev 4.1 (Fary-Milnorjev izrek) Naj bo c zavozlana, enostavno sklenjena kri-
vulja v prostoru. Potem je njena totalna ukrivljenost enaka vsaj 4π, torej K(c) ≥ 4π.
Poglejmo si primer krivulje, za katero velja omenjeni izrek.
Primer 4.2.1 : Na sliki (31) je prikazan vozel osmica [11]. Podan je z enacbo
c(t) = ((2 + cos(2t)) · cos(3t), (2 + cos(2t)) · sin(3t), sin(4t)) , kjer t ∈ R.
Gre za tipicen primer krivulje v prostoru, ki je enostavno sklenjena in zavozlana. Njenatotalna ukrivljenost je zato enaka K(c) ≥ 4π.
41

Slika 31: Vozel osmica
4.3 Dokaz
V dokazu bomo sledili viru [2]. Najprej predpostavimo naslednje: naj bo c enostavnosklenjena krivulja v prostoru s totalno ukrivljenostjo K(c) < 4π. V tem primeru mo-ramo dokazati, da je taksna krivulja c nezavozlana oziroma jo je mozno odvozlati. Izreknamrec pravi: ce bi bila ta krivulja c zavozlana, bi njena totalna ukrivljenost znasalaK(c) ≥ 4π. Da bi krivuljo c z zacetne predpostavke odvozlali, moramo najti izotopijoR3, ki preslika pot krivulje c v enostavno sklenjeno ravninsko krivuljo.
Ze po trditvi 3.6 vemo, da totalna ukrivljenost sklenjene prostorske krivulje znasaK(c) ≥ 2π · µ(c), kjer je µ(c) mostovno stevilo (glej definiciji 3.4 in 3.5). Ce ta pogojzdruzimo z izhodiscno predpostavko, sledi 2π · µ(c) ≤ K(c) < 4π. Ker je po definiciji3.5 mostovno stevilo µ(c) lahko le celo stevilo in ker ne more biti 2 (saj bi sicer dobilinesmisel 4π < 4π), je lahko le µ(c) = 1. Zato obstaja enotski vektor e ∈ R3 z µ(c) = 1.
Ce je krivulja c podana z naravnim parametrom, ima funkcija t → ⟨c(t), e⟩ na inter-valu [0, L) natanko en lokalni maksimum (in zato globalni maksimum) h+ in natankoen lokalni minimum h−, saj bi v nasprotnem primeru nasli se en lokalni maksimummed dvema razlicnima lokalnima minimuma. Pripadajoci tocki PMAX in PMIN s potikrivulje c razdelita sklenjeno prostorsko krivuljo na dva dela: cL in cD. Ker ni dodatnihlokalnih maksimumov ali minimumov, sta funkcija, ki t preslika v ⟨cL(t), e⟩, ter funk-cija, ki t preslika v ⟨cD(t), e⟩, strogo monotoni (ena strogo narascajoca, druga strogopadajoca).
42

Naj bo E0 ortogonalni komplement vektorja e v R3. E0 je torej ravnina, ki je pravokotnana vektor e (saj je ortogonalni komplement vektorja e v R3 po definiciji mnozica vsehtakih vektorjev, ki so pravokotni na vektor e). Naj bo h ∈ R3 in naj bo Eh afinaravnina, vzporedna ravnini E0 ter premaknjena v smeri vektorja e za dolzino h. Torej,Eh = x ∈ R3; ⟨x− he, e⟩ = 0. Potem pot krivulje c :(a) ne seka ravnine Eh, ce je h < h− ali h > h+ ;(b) seka ravnino Eh v natanko eni tocki, PMAX , ce je h = h+ ;(c) seka ravnino Eh v natanko eni tocki, PMIN , ce je h = h− ;(d) seka ravnino Eh v natanko dveh tockah, PL(h) na cL in PD(h) na cD, ce je h− <h < h+ .Vse to je nazorno prikazano na sliki (32).
Slika 32: Presecisca krivulje z ravnino Eh
43

Uporabimo prvo izotopijo, s katero usredinimo daljice PL(h)PD(h) tako, da so vse po-ravnane na osi e. V ta namen naj bo Π : R3 → E0 pravokotna projekcija. Naj bo
ϕ1(t, x) =
x− t · Π(PMIN) za ⟨x, e⟩ ≤ h− ,
x− t · Π(PL(⟨x,e⟩)+PD(⟨x,e⟩)2
) za h− < ⟨x, e⟩ < h+ ,
x− t · Π(PMAX) za ⟨x, e⟩ ≥ h+ .
Ucinek te izotopije je razviden iz slike (33).
Slika 33: Izotopija za usredinjenje
V splosnem je lahko c tudi zvita okoli osi e. Temu se izognemo z drugo izotopijo.Definiramo zvezno preslikavo ω : R → E0, za katero velja:
ω(h) =
Π( PD(h)−PL(h)∥PD(h)−PL(h)∥
) za h− < h < h+ ,
Π( ˙c(tmax)) za h ≥ h+ ,
Π(− ˙c(tmin)) za h ≤ h− .
44

Ob tem veljata naslednji enakosti: c(tmax) = PMAX in c(tmin) = PMIN . Za ortogonalnobazo E0 izberemo vektorja e1 in e2.
Za nadaljevanje dokaza se moramo najprej spomniti leme o dvigu ter leme, ki se nanjonanasa (glej trditvi 3.1 in 3.3 , povzeti po [2] na straneh 37-38 in 41-43). Naj boX ⊂ Rn zvezdasta mnozica (glej definicijo 3.2 , vzeto iz [2] na strani 41) glede na tockox0 (torej, naj za vsako tocko x ∈ X velja, da je daljica xx0 v celoti vsebovana v X).Naj bo e : X → S1 ⊂ R2 zvezna funkcija. Potem obstaja taksna zvezna funkcijaϑ : X → R, da velja:
e(x) = (cos(ϑ(x)), sin(ϑ(x))) za ∀ x ∈ X .
Lema o dvigu nam zagotavlja obstoj zvezne funkcije ϑ : R → R, ki zadosca pogoju:
ω(h) = cos(ϑ(h)) · e1 + sin(ϑ(h)) · e2 .
Sedaj krivuljo c odvrtimo z uporabo izotopije
ϕ2(t, x) = ⟨x, e⟩ · e+[
cos(tϑ(⟨x, e⟩)) sin(tϑ(⟨x, e⟩))− sin(tϑ(⟨x, e⟩)) cos(tϑ(⟨x, e⟩))
]· Π(x) .
Matrika predstavlja rotacijo v ravnini E0 za kot −tϑ(⟨x, e⟩) glede na izbrano bazo e1,e2. Za t = 0 velja ϕ2(0, x) = ⟨x, e⟩ · e+Π(x) = x, ϕ2(1, ·) pa zavrti krivuljo c v ravniniEh za kot −ϑ(h).
Koncni rezultat vsega tega je enostavno sklenjena krivulja v (e− e1) ravnini. Dobimotorej nezavozlano krivuljo c.
To pa pomeni, da je totalna ukrivljenost zavozlane enostavno sklenjene krivulje vprostoru res vecja ali enaka 4π.
�
Opomba: dokaz smo povzeli po viru [2].
45

5 ZAKLJUCEK
V diplomski nalogi smo natancno preucili najrazlicnejse lastnosti vseh mogocih krivulj.Seznanili smo se z naslednjimi pojmi: parametrizirane krivulje, sklenjene krivulje,konveksne krivulje, ukrivljenost krivulj, zavozlanost krivulj. Podrobno smo analiziralizlasti krivulje v ravnini in 3-dimenzionalnem prostoru. Temeljito smo spoznali pomenFary-Milnorjevega izreka ter korakoma izpeljali njegov dokaz.
Znanje o krivuljah in njihovih lastnostih je zelo dobrodoslo, saj se v zivljenju velikokratsrecujemo z najrazlicnejsimi oblikami krivulj. Le te se pojavljajo predvsem kot robovivseh moznih ploskev na vsakdanjih predmetih, ki nas obkrozajo. V ta sklop na primersodijo: robovi ploskev mize, stolov, omar, polic, talnih preprog, naslonjacev, luci, avto-mobilov, letal, . . . Krivulj pa ne srecujemo zgolj na vsakdanjih predmetih, pac pa tudiv naravi. Na rastlinah so robovi listov pravzaprav krivulje. Tretji vecji sklop krivulj,ki jih srecujemo v vsakdanjem zivljenju, pa predstavljajo vozli. Najpomembnejsi innajbolj znani so mornarski vozli.
46

6 LITERATURA
[1] Adams, C. (2004). The Knot Book: An Elementary Introduction to the Mathema-tical Theory of Knots, Rhode Island: AMS
[2] Bar, C. (2010). Elementary Differential Geometry, Cambridge: Cambridge Univer-sity Press
[3] Chern, S. S. in drugi, Istvan Fary - Mathematics: Berkeley,http : //content.cdlib.org/view?docId = hb4d5nb20m&doc.view = frames&chunk.id =div00051&toc.depth = 1&toc.id =
[4] Emiris, I. in drugi, Exact Delaunay graph of smooth convex pseudo-circles,http : //cgi.di.uoa.gr/ ∼ geotz/bib/papers/EmTsTz −Man09−Delaunay.pdf
[5] Gluck, H., Math 501 - Differential Geometry: The Fary-Milnor Theorem,http : //www.math.upenn.edu/ shiydong/Math501X − 8− F aryMilnor.pdf
[6] Lett, R. in drugi, curvature (space curve) (version 9),http : //planetmath.org/encyclopedia/CurvatureOfACurve.html
[7] Matson, J. in drugi, Dimension-Cruncher: Exotic Spheres Earn MathematicianJohn Milnor an Abel Prize,http : //www.scientificamerican.com/article.cfm?id = milnor−abel− prize− 2011
[8] http : //en.wikipedia.org/wiki/Ampersand curve#Three− leaved clover
[9] http : //en.wikipedia.org/wiki/F ary −Milnor theorem
[10] http : //en.wikipedia.org/wiki/F ary theorem
[11] http : //en.wikipedia.org/wiki/F igure eight knot (mathematics)
[12] http : //en.wikipedia.org/wiki/Frenet− Serret formulas
[13] http : //en.wikipedia.org/wiki/Istvan F ary
[14] http : //en.wikipedia.org/wiki/John Milnor
[15] http : //en.wikipedia.org/wiki/Star domain
47

[16] http : //en.wikipedia.org/wiki/Torus knot
[17] http : //en.wikipedia.org/wiki/Total curvature
[18] http : //encyclopedia2.thefreedictionary.com/convex+ curve
[19] http : //mathworld.wolfram.com/TotalCurvature.html
[20] http : //sl.m.wikipedia.org/wiki/Astroida#section 3
[21] http : //sl.m.wikipedia.org/wiki/Deltoida#section 1
[22] http : //sl.m.wikipedia.org/wiki/Dvorogeljnik (matematika)
[23] http : //sl.m.wikipedia.org/wiki/Geronova lemniskata
[24] http : //sl.m.wikipedia.org/wiki/Metuljna krivulja (transcendentna)
[25] http : //sl.m.wikipedia.org/wiki/Nefroida#section 1
[26] http : //sl.m.wikipedia.org/wiki/Seznam krivulj#section 7
[27] http : //sl.m.wikipedia.org/wiki/Srcnica#section 1
[28] http : //sl.m.wikipedia.org/wiki/V ivianijeva krivulja
[29] http : //sl.wikipedia.org/wiki/Bernoullijeva lemniskata
[30] http : //sl.wikipedia.org/wiki/Geometrija
[31] http : //sl.wikipedia.org/wiki/Krivulja
[32] http : //sl.wikipedia.org/wiki/Ukrivljenost
[33] http : //ucilnica.fmf.uni− lj.si/file.php/100/krivuljey.pdf
[34] http : //ucilnica0910.fmf.uni− lj.si/mod/resource/view.php?id = 1596
[35] http : //www − history.mcs.st− andrews.ac.uk/Biographies/Milnor.html
48

[36] http : //www.fmf.uni− lj.si/ globevnik/skriptaII.pdf
[37] http : //www.math.miami.edu/ galloway/dgnotes/chpt2.pdf
[38] http : //xahlee.info/SpecialP laneCurves dir/EpiHypocycloid dir/epiHypocycloid.html
49















