Embed Size (px)
Citation preview

Człowiek- najlepsza inwestycja
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Modelowanie elektrycznych układów
napędowych urządzeń mechatronicznych
Jakub Wierciak

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Modelowanie
(Osowski 1997)
Modelowanie i symulacja zjawisk i procesów zachodzących
w układach dynamicznych polega na przyporządkowaniu im
odpowiedniej postaci opisu matematycznego,
określeniu parametrów funkcji użytych w modelu,
a następnie rozwiązaniu ich przy użyciu wybranego symulatora.

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Modelowanie
(Świtoński 2004)
Modelowanie jest (...) w dużej mierze sztuką: sztuka modelowania
polega na dopasowaniu obliczanego przebiegu procesu do przebiegu
procesu reprezentowanego przez serię pomiarów.
Cechy geometryczne rzeczywistych obiektów oraz wszystkie inne
abstrakcje wynikające z idealizacji rzeczywistości muszą być
sprowadzone do konstruktywnych serii liczb.
Rzeczywistość, taka jaka jest, musi być przedstawiona
w postaci innej serii liczb, którą następnie można porównać
z obliczonymi na podstawie sprawdzonej teorii.

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Cele modelowania
(Osowski 1997)
Próba zrozumienia istoty procesu w celu predykcji jego przebiegu
w wyniku zmienionych warunków przy różnych wartościach
parametrów (np. określenie zależności charakterystyk urządzenia
od jego cech konstrukcyjnych)
Umożliwienie badania cech jakościowych procesu
Umożliwienie aktywnego sterowania procesem poprzez wpływanie
w określony sposób na jego parametry wewnętrzne
Zastosowanie modelu w systemie adaptacyjnym zamkniętym,
umożliwiającym zmianę procesu w kierunku pożądanym przez
użytkownika (przykład „inteligentnego” siłownika liniowego)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model
Model
założona zależność
pomiędzy obserwowanymi sygnałami systemu
(Ljung 1987)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
wyobrażeniowe
graficzne
matematyczne (analityczne)
symulacyjne (programowe)
Rodzaje modeli
(Ljung 1987)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model wyobrażeniowy – przykład
(Wierciak 2009)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model wyobrażeniowy – przykład
(Wierciak 2009)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model wyobrażeniowy – przykład
(Wierciak 2009)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model graficzny – przykład statycznego
rozciągania próbki
(Niezgodziński 1998)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model matematyczny
uproszczony obraz danego układu lub procesu fizycznego,
wyrażający w języku matematycznym najistotniejsze
z punktu widzenia zastosowań cechy układu rzeczywistego.
Model matematyczny
(Osowski 1997)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model matematyczny – przykład
(Osowski 1997)
E - moduł Younga
F - siła rozciągająca
S - pole przekroju
Δl - wydłużenie pręta
l - długość początkowa
ES
Fll
• Prawo Hooke’a

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Modele matematyczne
(Osowski 1997)
deterministyczne
losowe
rozmyte

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model deterministyczny
(Osowski 1997)
ścisłe przyporządkowanie wielkości wejściowej x wielkości
wyjściowej y, określone funkcją
Model deterministyczny
txfy ,
przy czym funkcja ta może być jednoznaczna lub wieloznaczna
Charakterystyka układu nieliniowego
z niejednoznacznością w obu osiach

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model losowy
(Maksymiuk 2003)
to rozkłady prawdopodobieństw odpowiadające zmiennym losowym –
dyskretnym lub ciągłym. Rozkłady takie opisywane są alternatywnie
funkcjami:
• dystrybuanty, tj. skumulowanej gęstości prawdopodobieństwa (ang.
Cumulative Distribution Function CDF) – oznaczającej prawdopodo-
bieństwo zaistnienia zmiennej losowej X, równej co najwyżej xi
Modele losowe (probabilistyczne)
• gęstości prawdopodobieństwa (ang. Probability Density Function
PDF) wyznaczającej prawdopodobieństwo zaistnienia danej realizacji xi
zmiennej losowej
xxXPxF ii ,

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model losowy
(Maksymiuk 2003)
dystrybuanta
gęstość
prawdopodobieństwa
Histogram empiryczny oraz dystrybuanta empiryczna na tle wykresów funkcji gęstości
prawdopodobieństwa – na przykładzie rozkładu normalnego (Gaussa);
ni – liczba zdarzeń w wybranych przedziałach zmiennej losowej X

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Modele rozmyte
(Osowski 1997)
to taki model, w którym tej samej wartości zmiennej x można
przyporządkować różne charakterystyki z określoną wartością
stopnia przynależności do niej. Stopień ten zdefiniowany jest
w postaci tak zwanej funkcji przynależności μF(x), gdzie F oznacza
zbiór tych charakterystyk. Wartość μF(x) zawiera się w przedziale [0,
1], przy czym spełnienie warunku μF(x) = 1 oznacza pełną
przynależność do zbioru, a μF(x) = 0 oznacza brak tej
przynależności.
Model rozmyty
Klasyfikacja rozmyta liczb w zakresie 1 – 10
(M – liczby małe, S – liczby średnie,
D – liczby duże)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Kosztowa efektywność wyrobu
(Juran, Gryna 1980)
AP RP CP
PSE – efektywność systemu
PA – prawdopodobieństwo gotowości wyrobu
PR – niezawodność
PC – prawdopodobieństwo, że projekt zapewnia realizację funkcji
Kosztowa efektywność
wyrobu
Całkowity koszt Efektywność
Gotowość Niezawodność Zdolność
CRASE PPPP
Zdolność

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Symulacyjny model złożonego systemu
– samolot F-14
(MathWorks Inc. 1992)
Angle of Attack
Pilot G forceScope
1
alpha (rad)
1/Uo
Nz pilotcalculation
AircraftDynamics
Model
Zw
+
+
Mw
MqDryden WindGust Models
wGust
qGust
+
+
1
u
Controller
Pilot
q
w
Stick Input
To start and stop the simulation, use the "Start/Stop"selection in the "Simulation" pull-down menu
F-14 Flight Control(Double click on the "?" for more info)
? Double clickhere for
SIMULINK Help
1
Ta.s+1
ActuatorModel
2
Nz Pilot (g)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
rozwiązanie zadania zapisanego w postaci modelu
matematycznego z użyciem “symulatora”,
najczęściej w dziedzinie czasu.
Symulacja działania systemu
(Osowski 1997)
Symulacja

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Przykładowe odpowiedzi symulacyjne
siłownika liniowego
(Wierciak 2004)
0 0.1 0.2 0.3 0.4 0.5 0
50
100
150
200
250
300
Czas t [s]
Siła
ob
cią
że
nia
F [N
]
0 0.1 0.2 0.3 0.4 0.5 0
200
400
600
800
Czas t [s]
Czę
sto
tliw
ość ta
kto
wa
nia
f [H
z]
0 0.1 0.2 0.3 0.4 0.5
0.2
0.4
0.6
0.8
1.2
Czas t [s]
1.0
Prz
em
ieszcze
nie
po
pych
acza
x [
mm
]
0 0.1 0.2 0.3 0.4 0.5
-2
-1
0
1
2
Ką
t n
iezgo
dn
ości
δ [ra
d]
Czas t [s]
tF F
λF- szybkość
narastania siły [N/s]

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
• równanie stanu
• równanie wyjścia
Opis układów dynamicznych równaniami
stanu
(Osowski 1997)
wektor zmiennych stanu
wektor zmiennych wejściowych
wektor zmiennych wyjściowych
tttt 01 ,,uxx
tttt ,, uxgy
Tn21 xxx ...,,,x
TN21 uuu ...,,,u
Tm21 yyy ...,,,y

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
tuuuxxxfx N21n2111 ,...,,,,...,,,
tuuuxxxfx N21n2122 ,...,,,,...,,,
.......................................................
tuuuxxxfx N21n21nn ,...,,,,...,,,
zapis wektorowy
• równanie stanu
• równanie wyjścia
t,, uxfx
t,, uxgy
Opis dynamiczny
układów ciągłych nieliniowych
(Osowski 1997)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
macierze współczynników
• równanie stanu
• równanie wyjścia
Opis dynamiczny układów ciągłych
liniowych
(Osowski 1997)
uBAxx
uDCxy
wymiar wektora zmiennych stanu nx
wymiar wektora zmiennych wejściowych
Nu
wymiar wektora zmiennych wyjściowych
my
nnR xA NnR xB nmR xC nmR xD

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Klasyfikacja modeli ze względu na
charakter współrzędnych stanu
(Isermann 2005)
Modele o parametrach
rozłożonych
(współrzędne stanu
zależą od miejsca z i czasu t)
Równanie różniczkowe
cząstkowe nieliniowe
Równanie różniczkowe
cząstkowe liniowe
Równanie różniczkowe
cząstkowe liniowe
niższego rzędu
Równanie różniczkowe
zwyczajne jako funkcja
miejsca (profil statyczny)
linearyzacja
redukcja rzędu
pochodne
δ’…/ δt = 0
Modele o parametrach
skupionych
(współrzędne stanu
zależą od czasu t)
Równanie różniczkowe
zwyczajne nieliniowe
Równanie różniczkowe
zwyczajne liniowe
n-tego rzędu
Równanie różniczkowe
zwyczajne liniowe
rzędu < n
Równanie algebraiczne
(zachowania statyczne)
linearyzacja
redukcja rzędu
pochodne
d’…/ dt = 0
aproksymacja
aproksymacja
aproksymacja
ustalone miejsce

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Schemat urządzenia mechatronicznego
(Gawrysiak 1997)
Układy
pomiarowe
Układy
wykonawcze
Ste
row
an
y p
roces
Sterownik
Komunikacja z innymi
urządzeniami
Komunikacja z innymi
urządzeniami
Urządzenia
do wprowadzania
danych
Urządzenia
do wyprowadzania
danych

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Proces projektowania urządzeń
mechatronicznych
(Isermann 2005)
1. Requirements engineering
deliverable: requirements document.
2. Specification
deliverable: specification documents.
3. System design
deliverable: system design document.
4. Modelling and simulation
deliverables: design data, mathematical models, dynamic requirements, placement and type of
actuators
and sensors, performance measures for microcomputer, peripherals and buses.
5. Component design
deliverables: single prototype components ready for integration.
6. Prototypes
deliverables: single prototype components, ready for integration.
7. Mechatronic components
components ready for integration: mechanics, electronics, control, HMI;
electronic control unit (ECU) with implemented software.
8. Component testing
deliverables: hints for design and redesign.
9. System integration (hardware)
deliverable: hardware integrated mechatronic product or system.
10. System integration (software)
deliverable: hardware and software integrated mechatronic product or system.
11. System testing
deliverable: redesign of components, if required.
12. Field testing
validation: testing if final product is appropriate for its purpose with regard to the requirements
deliverable: redesign if required.
13. Production includes: available technologies for manufacturing, assembling, until quality control.

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Proces projektowania urządzeń
mechatronicznych
(VDI 2004)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Algorytm projektowania urządzeń
mechatronicznych
(Wierciak 2007)
1. Opracowanie założeń użytkowych
- funkcja główna, struktura systemu, interfejsy
2. Analiza funkcji głównej urządzenia
- wykaz układów wykonawczych (sterujących) i pomiarowych
wraz z wymaganiami technicznymi
3. Opracowanie układów wykonawczych i pomiarowych
- propozycje technicznych rozwiązań poszczególnych układów
4. Opracowanie podsystemów urządzenia: mechanicznego,
elektronicznego i programowego
- dokumentacje techniczne
5. Nadzór nad wykonaniem prototypu
- poprawki konstrukcyjne
6. Uruchamianie prototypu
- modyfikacje systemu

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Struktura systemu mechatronicznego
(Wierciak 1995)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Założenia użytkowe
– schemat projektowanego urządzenia
(Subdysiak 2009)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Analiza funkcji – schemat blokowy
funkcjonalny
(Subdysiak 2009)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Opracowanie podsystemów
(podsystem mechaniczny)
(Subdysiak 2009)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Opracowanie podsystemów
– analiza odkształceń elementu
(Subdysiak 2009)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Opracowanie podsystemów – widok
urządzenia
(Lisicki, Wierciak 2005)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Struktury systemu mechatronicznego
(Wierciak 2007)
Układy wykonawcze
Układy pomiarowe

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Elektryczny
układ
napędowy
Napędzany
mechanizm
Obciążenie
mechaniczne
Sygnały
sprzężenia
zwrotnego
Moc
mechaniczna
Zasilanie
elektryczne
Sygnał
sterujący
Układ realizujący określoną
funkcję urządzenia
Układ wykonawczy
(Wierciak 1999)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Miniaturowy siłownik liniowy
napędzany silnikiem elektrycznym
(Ultra Motion 2000)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Modelowanie (theoretical modelling)
Budowanie modeli
(Ljung 1987, Isermann 2005)
budowanie modelu w oparciu o prawa i zależności
znane z wcześniejszych doświadczeń.
Identyfikacja (experimental modelling)
budowanie modelu w oparciu o analizę danych
doświadczalnych.

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Schemat blokowy elektrycznego siłownika
liniowego
(Wierciak 2006)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Klasyfikacja modeli ze względu na
charakter współrzędnych stanu
(Isermann 2005)
Modele o parametrach
rozłożonych
(współrzędne stanu
zależą od miejsca z i czasu t)
Równanie różniczkowe
cząstkowe nieliniowe
Równanie różniczkowe
cząstkowe liniowe
Równanie różniczkowe
cząstkowe liniowe
niższego rzędu
Równanie różniczkowe
zwyczajne jako funkcja
miejsca (profil statyczny)
linearyzacja
redukcja rzędu
pochodne
δ’…/ δt = 0
Modele o parametrach
skupionych
(współrzędne stanu
zależą od czasu t)
Równanie różniczkowe
zwyczajne nieliniowe
Równanie różniczkowe
zwyczajne liniowe
n-tego rzędu
Równanie różniczkowe
zwyczajne liniowe
rzędu < n
Równanie algebraiczne
(zachowania statyczne)
linearyzacja
redukcja rzędu
pochodne
d’…/ dt = 0
aproksymacja
aproksymacja
aproksymacja
ustalone miejsce

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
1. Równanie różniczkowe
2. Transmitancja operatorowa
3. Odpowiedź impulsowa
4. Odpowiedź jednostkowa
5. Transmitancja widmowa
6. Charakterystyki częstotliwościowe
7. Metoda przestrzeni fazowej i płaszczyzny fazowej
Metody opisu ciągłych liniowych
jednowymiarowych obiektów sterowania
(Pełczewski 1980)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
1. Układ równań różniczkowych
2. Macierz transmitancji
3. Metoda zmiennych stanu
Opis liniowych wielowymiarowych
układów sterowania
(Pełczewski 1980)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
równania równowagi dla zakumulowanych mas
i energii
równania stanu fizyczno-chemicznego elementów
specjalnych
równania fenomenologiczne dla procesów
nieodwracalnych
równania równowagi entropii
równania łączące elementy procesów
Rodzaje podstawowych równań
w modelowaniu teoretycznym
(Isermann 2005)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
energia mechaniczna
energia cieplna
energia elektryczna
energia chemiczna
energia atomowa
Rodzaje energii akumulowanej
i przenoszonej
(Isermann 2005)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Modele poznawcze (globalne)
- których współczynniki są parametrami analizowanych
zjawisk
Modele zastępcze (parametryczne)
- wiernie oddające zachowanie rzeczywistych obiektów
w odpowiedzi na określone wymuszenia
Klasyfikacja modeli
ze względu na przeznaczenie
(Gajda 1991, Janiszowski 1991)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Siłownik liniowy LA34C2xN6-M8x1,0
(Kowalski, Oleksiuk, Czerwiec, Wierciak 2004)
Gwintowana część popychacza
Nakrętka
Łożysko specjalne Stojan silnika
Łożysko kulkowe
Tuleja specjalna
Wirnik silnika
Wałek drążony
Gładka część popychacza
Obudowa
Uszczelniacz
Układ antyzakleszczeniowy
Mikrowyłącznik
Wpust
Tuleja podpierająca

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
KD - współczynnik tłumienia lepkiego
Js - masowy moment bezwładności wirnika
Jh - zredukowany masowy moment bezwładności obciążenia
MF - moment tarcia w silniku
Mlt - zredukowany tarciowy moment obciążenia
Mh - czynny moment obciążenia
Me - moment elektromagnetyczny silnika
φs - kątowe położenie wirnika
φs0 - początkowe położenie wirnika
ωs0 - początkowa prędkość kątowa wirnika
ehs
tFs
D2s
2
hs MMt
MMt
Kt
JJ
d
dsgn
d
d
d
d
0s0t
s0ss
t
)t(0
d
d,
Model ruchu obrotowego
(Owczarek 1982)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Modelowanie mechanizmu zamiany ruchu
(Oleksiuk 1999)
Ml - moment obciążenia silnika
F - siła obciążenia popychacza
P - skok gwintu
μ - współczynnik tarcia
d2 - średnia średnica gwintu
γ - kąt pochylenia linii śrubowej
ρ’ - pozorny kąt tarcia
• Moment obciążający silnik
'tg 2l Fd2
1M
2d
P
arctg
2tg
/cos'
• Kąt pochylenia linii śrubowej
• Pozorny kąt tarcia

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Moment synchronizujący silnika
skokowego
(Owczarek 1982)
Mmax - maksymalny moment silnika
δ - kąt niezgodności położenia wirnika w odniesieniu do położenia
osi pola elektromagnetycznego stojana
sinMM maxe

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Zr - liczba zębów wirnika
γm - chwilowe położenie wirnika
γu - chwilowe położenie równowagi wirnika
tZ umr Położenie γu
równowagi wirnika
Rzeczywiste
położenie γm
wirnika
-Te
Moment
Kąt niezgodności δ
Położenie
wirnika
Obliczanie kąta niezgodności
(Owczarek 1982)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model sygnału sterującego
(Wierciak 2002)
Czas
γu
γu0
Τk
tf1t k0uu E)(
kk
f
1T
E - funkcja „entier”
fk - częstotliwość komutacji
γu - chwilowe położenie stabilnej równowagi wirnika
γu0 - podstawowy kąt skoku
Tk - okres generowania skoków
• Położenia stabilnej równowagi wirnika

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Symulacyjny model siłownika liniowego
(Bodnicki, Oleksiuk, Wierciak 2001)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Angular position of rotor (rd)
Linear displacement of pusher (mm)
Positioning error (e-3 mm)
Angular velocity of rotor (rd/s)
Symulowane odpowiedzi siłownika
liniowego
(Wierciak 2002)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Symulowane odpowiedzi układu (przykład)
(Wierciak 2002)
Odpowiedzi silnika FA 23C 21S8 na pojedynczy takt komutacji
Silnik nieobciążony Silnik obciążony masowym momentem
bezwładności Jl = 50e-6 kg·m2
0 0,01 0,02 0,03 0,04 0,050,01
0,02
0,03
0,04
0,05
0,06
Czas t [s]
Kąt obrotu wirnika γ [rad]
0 0,01 0,02 0,03 0,04 0,05
0,01
0,02
0,03
0,04
0,05
0,06
Czas t [s]
Kąt obrotu wirnika γ [rad]

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Analiza wyników symulacji (przykład)
(Wierciak 2002)
Wyniki wyznaczenia stałej Dm
z wykorzystaniem pierwszych dwu (i = 1) amplitud
skokowych odpowiedzi silnika
0 20 40 60 80 1000,000
0,005
0,010
0,015
0,020Współczynnik tłumienia Dm [N·m/s]
Masowy moment bezwł. obciążenia Jl [kg·m2]

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Korzyści ze stosowania badań
modelowych
(Pelz 2003)
Stosunkowo niskie koszty prowadzenia badań
Możliwość prowadzenia badań w warunkach
nieosiągalnych w rzeczywistości
Powtarzalność badań
Pełny nadzór nad eksperymentami
Dostępność do wszystkich zmiennych
Brak ograniczeń czasowych
Uniknięcie problemów natury moralnej

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Ograniczenia badań modelowych
(Pelz 2003)
Potrzeba dysponowania kompletnymi i sprawdzonymi modelami
badanych systemów
Ograniczenia dokładności i szybkości eksperymentów ze względu
na ograniczoną moc obliczeniową zastosowanego sprzętu

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Zależności w procesie modelowania
(Pelz 2003)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Adaptacyjny proces modelowania zjawisk
w systemach dynamicznych
(Osowski 1997)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Elektryczny
układ
napędowy
Napędzany
mechanizm
Obciążenie
mechaniczne
Sygnały
sprzężenia
zwrotnego
Moc
mechaniczna
Zasilanie
elektryczne
Sygnał
sterujący
Projektowanie układów wykonawczych
(Wierciak 1999)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
1. Konstruktor zespołu wykonawczego projektuje
układ napędowy wykorzystując w miarę możliwości
podzespoły handlowe, o charakterystykach
podawanych przez producenta i mając do dyspozycji
symulacyjne narzędzia programowe
Założenia do projektowania
(Wierciak 1999)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Schemat blokowy elektrycznego układu
napędowego
(Wierciak 2000)
Sygnały
sprzężenia
zwrotnego
Sterownik Mikrosilnik
Układ
przeniesienia
napędu
Napędzany
mechanizm
Obciążenie Zredukowane
obciążenie
Moc
mechaniczna
Moc
mechaniczna
Napięcia
sterujące
Obciążenie
elektryczne
Moc
elektryczna
Sygnały
sterujące
UKŁAD NAPĘDOWY

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Karty katalogowe mikrosilników
elektrycznych
(ApiPortescap 1996)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Karta katalogowa miniaturowej przekładni
zębatej
(ApiPortescap 1996)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
• Charakterystyki funkcjonalne
• Charakterystyki niezawodnościowe
• Charakterystyki gotowości
Katalogowe charakterystyki
urządzeń precyzyjnych
(Wierciak 1999)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Katalogowe parametry mikrosilnika prądu
stałego
(ApiPortescap 1996)
Moment obciążenia Mh
Mr
P2r
M
Ir
Prędkość kątowa ωPrąd I
Moc wyjściowa P2
Sprawność η
ωr
ηr

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Dane katalogowe miniaturowej przekładni
zębatej
(ApiPortescap 1996)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Katalogowe dane układu sterującego
(ApiPortescap 1996)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
1. Konstruktor zespołu wykonawczego projektuje
układ napędowy wykorzystując w miarę możliwości
podzespoły handlowe, o charakterystykach
podawanych przez producenta i mając do dyspozycji
symulacyjne narzędzia programowe
2. Zaprojektowany układ jest oceniany na podstawie
kryteriów funkcjonalnych
Założenia do projektowania
(Wierciak 1999)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
• Układy o pracy ciągłej
(realizacja ruchu z określonymi prędkościami)
służą do osiągania i utrzymywania z określonym błędem zadanych
wartości prędkości napędzanych elementów
np. napędy nośników informacji: CDR, twarde dyski,
taśma magnetyczna
• Układy pozycjonujące
(pozycjonowanie)
służą do ustawiania napędzanych mechanizmów w określonych
położeniach liniowych lub kątowych z wymaganą szybkością
i dokładnością np. głowice czytające lub zapisujące
• Układy siłowe (momentowe)
(wywieranie określonych sił lub momentów)
służą do zadawania i utrzymywania określonych wartości siły lub momentu
np. napinacze taśmy, chwytaki robotów
Klasyfikacja układów napędowych
ze względu na realizowana funkcję
(Wierciak 1999)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Napęd dysku twardego
Robot mobilny z chwytakiem
A. Pozycjonowanie
B. Ruch z określoną
prędkością
C. Oddziaływanie określoną
siłą/momentem
Podstawowe funkcje napędów
mechatronicznych
(Wierciak 2003)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Wymagania stawiane układom napędowym
(Wierciak 2003)
1.Duża dokładność
2.Krótki cykl
pozycjonowania
1.Małe wahania prędkości
2.Krótki czas regulacji
1.Stabilność siły
2.Krótki czas regulacji
NIEZAWODNOŚĆ DOSTĘPNOŚĆ
CHARAKTERYSTYKI FUNKCJONALNE
A. Pozycjonowanie
C. Oddziaływanie określoną
siłą/momentem
B. Ruch z określoną
prędkością

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model ruchu obrotowego
Model układu
przeniesienia
napędu
Model
mechanizmu
Model układu
przeniesienia
napędu
Kąt obrotu wirnika
Zredukowane
obciążenia
Kąt obrotu
wałka wyjściowego
Model
silnika
Model układu
sterującego
Obciążenia
Sygnały sprzężenia
zwrotnego
Obciążenie
elektryczne
Sygnał
sterujący
Moment
elektromagnetyczny
Zasada modelowania elektrycznych
układów napędowych
(Wierciak 2002)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Js - masowy moment bezwładności wirnika
Jr - zredukowany masowy moment bezwładności obciążenia
KD - współczynnik tłumienia lepkiego
MF - moment tarcia w silniku
Mt - zredukowany tarciowy moment obciążenia
Mr - zredukowany czynny moment obciążenia
Me - moment elektromagnetyczny silnika
φs - kątowe położenie wirnika
φs0 - początkowe położenie wirnika
ωs0 - początkowa prędkość kątowa wirnika
ers
tFs
Ds
rs MMt
MMt
Kt
JJ
d
dsgn
d
d
d
d2
2
00
0d
d,0 s
t
sss
t
)t(
Model ruchu obrotowego – układy
pozycjonujące
(Owczarek 1982)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Model ruchu obrotowego
Model układu
przeniesienia
napędu
Model
mechanizmu
Model układu
przeniesienia
napędu
Kąt obrotu wirnika
Zredukowane
obciążenia
Kąt obrotu
wałka wyjściowego
Model
silnika
Model układu
sterującego
Obciążenia
Sygnały sprzężenia
zwrotnego
Obciążenie
elektryczne
Sygnał
sterujący
Moment
elektromagnetyczny
Zasada modelowania elektrycznych
układów napędowych
(Wierciak 2002)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
ers
tFs
Ds
rs MMt
MMt
Kt
JJ
d
dsgn
d
d
d
d2
2
Js - masowy moment bezwładności wirnika
Jr - zredukowany masowy moment bezwładności obciążenia
KD - współczynnik tłumienia lepkiego
MF - moment tarcia w silniku
Mt - zredukowany tarciowy moment obciążenia
Mr - zredukowany czynny moment obciążenia
Me - moment elektromagnetyczny silnika
φs - kątowe położenie wirnika
φs0 - początkowe położenie wirnika
ωs0 - początkowa prędkość kątowa wirnika
00
0d
d,0 s
t
sss
t
)t(
Model ruchu obrotowego – układy
pozycjonujące
(Owczarek 1982)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Js - masowy moment bezwładności wirnika
Jr - zredukowany masowy moment bezwładności obciążenia
KD - współczynnik tłumienia lepkiego
MF - moment tarcia w silniku
Mt - zredukowany tarciowy moment obciążenia
Mr - zredukowany czynny moment obciążenia
Me - moment elektromagnetyczny silnika
ωs - prędkość kątowa wirnika
ωs0 - początkowa prędkość kątowa wirnika
ertFDs
rs MMMMKt
JJ
sgnd
d
s0ts
0
Model ruchu obrotowego – układy
prędkościowe
(Owczarek 1982)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Wykaz ważniejszych źródeł
(Wierciak 2008)
Isermann R.: Mechatronic Systems – Fundamentals. Springer, 2005
Juran J. M., Gryna F. M. (Jr.): Quality Planning and Analysis. From Product
Development through Use. Second Edition. McGraw-Hill, Inc. 1980
Maksymiuk J.: Niezawodność maszyn i urządzeń elektrycznych. OWPW.
Warszawa 2003
Osowski S.: Modelowanie układów dynamicznych z zastosowaniem języka
Simulink. OWPW. Warszawa 1997
Pelz G.: Mechatronic systems. Modelling and simulation with HDLs. John
Wiley and Sons Ltd. Chichester 2003
Szymkat M.: Komputerowe wspomaganie w projektowaniu układów regulacji.
WNT. Warszawa 1993

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Niezawodność
Niezawodność
prawdopodobieństwo, że w danych warunkach,
w określonym okresie czasu
produkt będzie spełniał bez uszkodzeń określoną funkcję.
• wyrażana jest prawdopodobieństwem
• określa pomyślne działanie wyrobu
• określa środowisko, w którym wyrób musi działać
• określa wymagany czas pracy pomiędzy uszkodzeniami
(Juran 1980)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Analiza narażeń
(Juran 1980)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Katalogowe dane mikrosilnika
elektrycznego
(ApiPortescap 1996)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Maksymalna dopuszczalna moc P2cont
Prędkość kątowa silnika ωs
Maksymalny dopuszczalny moment obciążenia Tmax
Maksymalna dopuszczalna prędkość ωmax
Moment silnika M
Ograniczenie obszaru pracy mikrosilnika
elektrycznego
(API Portescap 1998)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Katalogowe dane miniaturowej przekładni
zębatej
(ApiPortescap 1996)

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Koncepcja rozszerzonych badań
modelowych
(Wierciak 2005)
Model funkcjonalny układu napędowego
Charakterystyki funkcjonalne
Badania symulacyjne
Model środowiska pracy
Charakterystyki narażeń
Opracowanie konstrukcyjne
Dokumentacja techniczna Model niezawodności
Analiza wymagań
Koncepcja naprawialności
PA PR PC
Gotowość Zdolność Niezawodność

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Symulacyjny model siłownika
(Wierciak 2004)
om_sign
0.06
Jm
0.01
Jl
++J
*Viscousdamping
.2
Dm
*
Friction
50
Tl
*
Frictionin gear
0.22
ro'+
+
Sum of angles
tan(u)
tangens
1/u 1/J
*
F*Dśr/2
*
Loadtorque
-
-
-
+
Torque
* Te
-1
-
1000
Temax
*
epsm
1/s
gammam
1/s
omegam
-K- 1/2
8
D of screw
1.25
Pitch
1/u
1/D*
Slope
atan(u) lambda
-K-
1/2pi
*
Lineardisp.
*Expected
linear
-K-1/2pi1
+ + - Position Error
1e-3
cor
Error
+ +(1+ft)1
1 1
ft
Force_
Frequency
1/s Integrator
Linear disp
Gearbacklash
Dev
sin(u) sin delta
50
p
+
-
delta/p
*
gammau(t)
0.03141528
Teta
+ - fcalc
Limiter
100
Margin
1*u Force
+
-
Sum
0.01
Tau
du/dt
dF/dt
f(u) Characteristic
+ - fcalc1
20
Margin1
Step Input

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Odpowiedzi siłownika na liniowe
narastanie siły- wyniki symulacji
(Wierciak 2004)
0 0.1 0.2 0.3 0.4 0.5 0
50
100
150
200
250
300
Czas t [s]
Siła
ob
cią
że
nia
F [N
]
0 0.1 0.2 0.3 0.4 0.5 0
200
400
600
800
Czas t [s]
Czę
sto
tliw
ość ta
kto
wa
nia
f [H
z]
0 0.1 0.2 0.3 0.4 0.5
0.2
0.4
0.6
0.8
1.2
Czas t [s]
1.0
Prz
em
ieszcze
nie
po
pych
acza
x [
mm
]
0 0.1 0.2 0.3 0.4 0.5
-2
-1
0
1
2
Ką
t n
iezgo
dn
ości
δ [ra
d]
Czas t [s]
tF F
λF- szybkość
narastania siły [N/s]

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
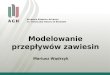
Odpowiedzi siłownika na skokowy wzrost
siły - wyniki symulacji komputerowej
(Wierciak 2004) S
iła o
bcią
że
nia
F [N
]
0 0.1 0.2 0.3 0.4 0.5
200
250
300
350
400
450
Czas t [s]
Czę
sto
tliw
ość ta
kto
wa
nia
f [H
z]
0 0.1 0.2 0.3 0.4 0.5
200
300
400
500
600
Czas t [s]
Prz
em
ieszcze
nie
po
pych
acza
x [
mm
]
0 0.1 0.2 0.3 0.4 0.5
0.2
0.4
0.6
0.8
1.0
1.2
Czas t [s]
Ką
t n
iezgo
dn
ości
δ [ra
d]
0 0.1 0.2 0.3 0.4 0.5 -3
-2
-1
0
1
Czas t [s]
ssu ttFFF 1
Fu – stała wartość siły
obciążenia [N],
Fs – skok siły [N],
ts – chwila wystąpienia
skoku siły [s]

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Siła obciążająca F [N]
Predkość popychacza v [mm/s]
1 2 3 4
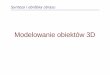
Graniczne charakterystyki rozruchu
siłownika LA34C2xN6x1,0
(Wierciak 2004)
Graniczna charakterystyka rozruchu
siłownika LA 34C2xN6x1,0
Prąd Is = 2A
0
200
400
600
800
1000
1200
0 2 4 6
Prędkość popychacza v [mm/s]
Sił
a o
bcią
żen
ia F
ob
[N]
Seria 1
Seria 2
Charakterystyka z symulacji

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Opracowanie dokumentacji konstrukcyjnej
(Wierciak 2007)
1. Opracowanie założeń użytkowych
- funkcja główna, struktura systemu, interfejsy
2. Analiza funkcji głównej urządzenia
- wykaz układów wykonawczych i pomiarowych
wraz z wymaganiami technicznymi
3. Opracowanie układów wykonawczych i pomiarowych
- propozycje technicznych rozwiązań poszczególnych układów
4. Opracowanie podsystemów urządzenia: mechanicznego,
elektronicznego i programowego
- dokumentacje techniczne
5. Nadzór nad wykonaniem prototypu
- poprawki konstrukcyjne
6. Uruchamianie prototypu
- modyfikacje systemu

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
Wykonanie i uruchomienie prototypu
(Wierciak 2007)
1. Opracowanie założeń użytkowych
- funkcja główna, struktura systemu, interfejsy
2. Analiza funkcji głównej urządzenia
- wykaz układów wykonawczych i pomiarowych
wraz z wymaganiami technicznymi
3. Opracowanie układów wykonawczych i pomiarowych
- propozycje technicznych rozwiązań poszczególnych układów
4. Opracowanie podsystemów urządzenia: mechanicznego,
elektronicznego i programowego
- dokumentacje techniczne
5. Nadzór nad wykonaniem prototypu
- poprawki konstrukcyjne
6. Uruchamianie prototypu
- modyfikacje systemu

Modelowanie
J. Wierciak: „Modelowanie i symulacja urządzeń mechatronicznych”
1. Ukierunkowanie narzędzi programowych na badanie
charakterystyk funkcjonalnych
2. Wymiana danych pomiędzy programami
3. Modelowanie przestrzenne przy projektowaniu podsystemu
mechanicznego
4. Symulacja w dziedzinie czasu przy opracowywaniu układów
realizujących funkcję główną
Podsumowanie i wnioski
(Wierciak 2005)