Embed Size (px)
Citation preview

SEMINARSKI RAD: Elektromehanički aktuatori
• Antonio Željeznjak
VELEUČILIŠTE U KARLOVCU

ElektromehaničkElektromehanički aktuatorii aktuatori
Antonio Antonio ŽelježnjakŽelježnjak

UvodUvod
Opčenito aktuatori su uređaji koji Opčenito aktuatori su uređaji koji pretvaraju električne ulaze u pretvaraju električne ulaze u mehaničke izlazemehaničke izlaze
Podjela aktuatora:Podjela aktuatora:
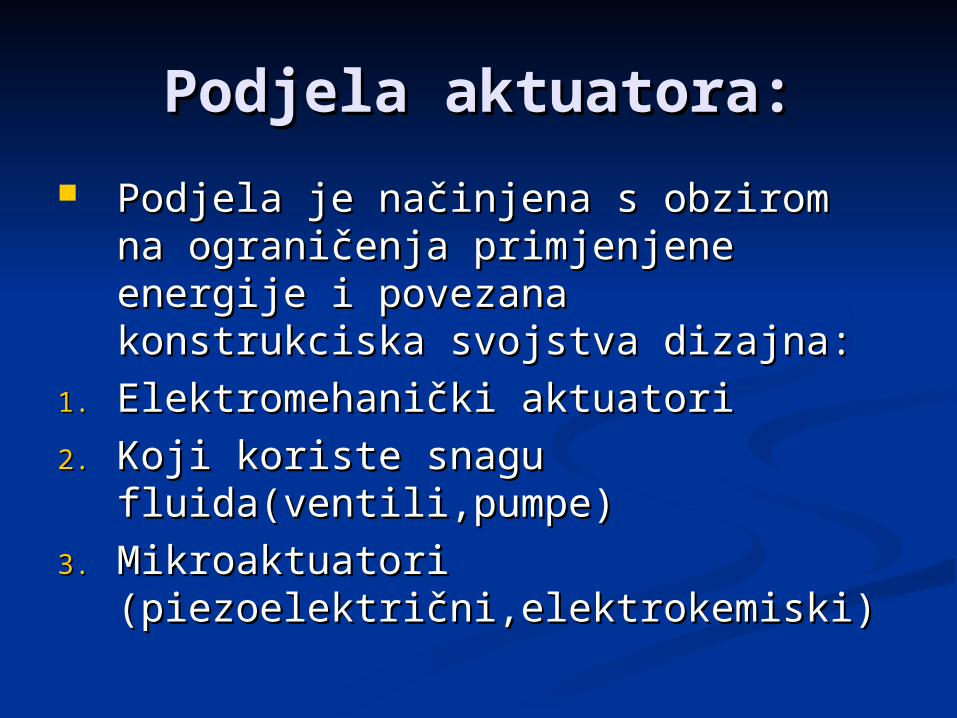
Podjela je načinjena s obzirom na Podjela je načinjena s obzirom na ograničenja primjenjene energije i ograničenja primjenjene energije i povezana konstrukciska svojstva povezana konstrukciska svojstva dizajna:dizajna:
1.1. Elektromehanički aktuatoriElektromehanički aktuatori
2.2. Koji koriste snagu Koji koriste snagu fluida(ventili,pumpe)fluida(ventili,pumpe)
3.3. Mikroaktuatori Mikroaktuatori (piezoelektrični,elektrokemiski)(piezoelektrični,elektrokemiski)
Elektromehanički Elektromehanički aktuatoriaktuatori
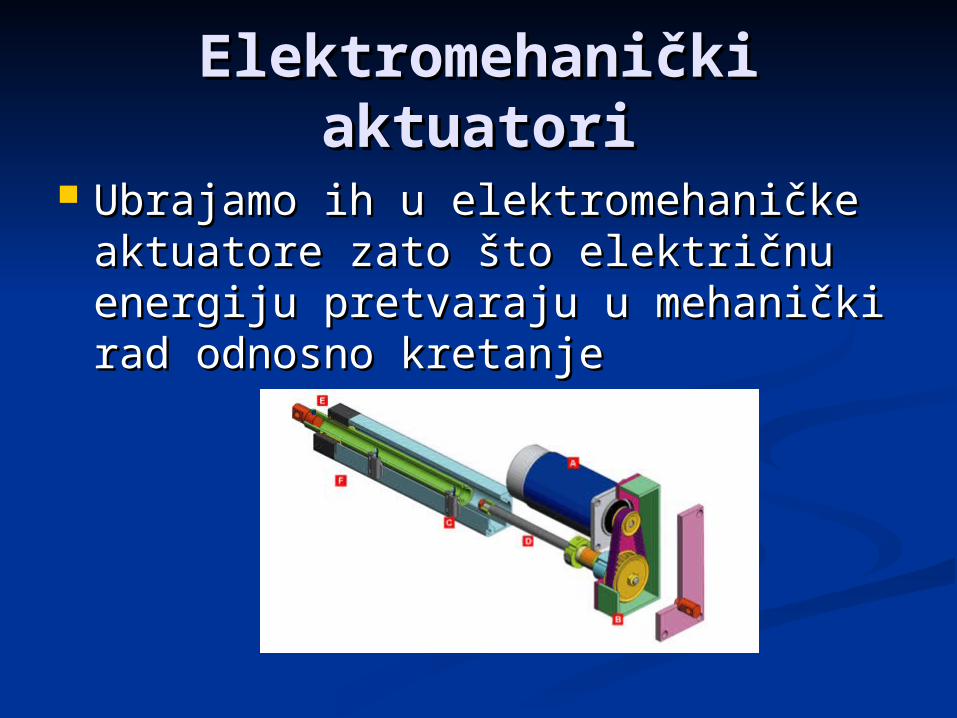
Ubrajamo ih u elektromehaničke Ubrajamo ih u elektromehaničke aktuatore zato što električnu aktuatore zato što električnu energiju pretvaraju u mehanički rad energiju pretvaraju u mehanički rad odnosno kretanjeodnosno kretanje
Elektromehanički Elektromehanički aktuatoriaktuatori
U ovoj prezentaciji objasnit čemo tri U ovoj prezentaciji objasnit čemo tri vrste elektromehanickih aktuatora, a vrste elektromehanickih aktuatora, a to su:to su:
1. 1. DC motorDC motor
2.2. AC motor AC motor
3.3. Koraćni motor Koraćni motor

DC motorDC motor istosmjerni motor, eng. istosmjerni motor, eng. DC motorDC motor, kakav danas , kakav danas
poznajemo slučajno je 1873. godine otkrio poznajemo slučajno je 1873. godine otkrio Zenobe Gramme kada je na dinamo koji je Zenobe Gramme kada je na dinamo koji je proizvodio struju spojio drugi dinamo koji se proizvodio struju spojio drugi dinamo koji se
počeo okretati kao motor.počeo okretati kao motor.

DC motorDC motor
Istosmjerni motor je Istosmjerni motor je elektromehanički uređaj koji elektromehanički uređaj koji istosmjernu struju pretvara u istosmjernu struju pretvara u rotacijsko gibanje. rotacijsko gibanje.

Osnovni dijelovi:Osnovni dijelovi:
1.1.stator stator - nepokretni dio na kojem se - nepokretni dio na kojem se nalaze permanentni magneti koji nalaze permanentni magneti koji stvaraju magnetsko poljestvaraju magnetsko polje
2.2.rotorrotor-izrađen je od dinamo limova i -izrađen je od dinamo limova i učvrščen na osovinu.U utorima se učvrščen na osovinu.U utorima se nalazi armaturni namot čiji su nalazi armaturni namot čiji su namoti spojeni na lamele kolektoranamoti spojeni na lamele kolektora

Osnovni dijeloviOsnovni dijelovi
3.3.kolektorkolektor-je smješten uz sam rotor na -je smješten uz sam rotor na osovini motora, a satoji sa od bakren osovini motora, a satoji sa od bakren lamela(međusobno su izolirane i izorane lamela(međusobno su izolirane i izorane od osovine) po kojima klize četkiceod osovine) po kojima klize četkice
44.četkice.četkice-izrađene su od mekšeg -izrađene su od mekšeg materijala (tvrdi, grafitni ili metalni materijala (tvrdi, grafitni ili metalni ugljen) i one svojom čitavom porsinom ugljen) i one svojom čitavom porsinom leže na kolektoru pod određenim leže na kolektoru pod određenim pritiskompritiskom

Osnovni dijeloviOsnovni dijelovi

Princip radaPrincip rada
Protjecanjem istosmjerne struje kroz Protjecanjem istosmjerne struje kroz vodič koji se nalazi u magnetskom polju vodič koji se nalazi u magnetskom polju stvara se, prema lijeve ruke, sila koja stvara se, prema lijeve ruke, sila koja zbog svog hvatišta, koje se nalazi izvan zbog svog hvatišta, koje se nalazi izvan osi rotacije rotora, stvara moment koji osi rotacije rotora, stvara moment koji zakreće rotorzakreće rotor
Električna veza između rotora i izvora Električna veza između rotora i izvora istosmjerne struje se ostvaruje tako da istosmjerne struje se ostvaruje tako da se izvor istosmjerne struje spoji na se izvor istosmjerne struje spoji na grafitne četkice koje kližu po grafitne četkice koje kližu po komutatoru. komutatoru.

Princip radaPrincip rada

Princip radaPrincip rada

Vrste DC motoraVrste DC motora
1.1. Motor sa stranom uzbudomMotor sa stranom uzbudom
2.2. Serijski motorSerijski motor
3.3. Paralelni motorParalelni motor
4.4. Mješovito uzbuđenMješovito uzbuđen
5.5. Dc motor sa četkicamaDc motor sa četkicama
6.6. DC motor bez četkicaDC motor bez četkica

Nedostatak DC motoraNedostatak DC motora Prilikom prelaska četkice s jedne na drugu Prilikom prelaska četkice s jedne na drugu
lamelu komutatora postoji trenutak kada se lamelu komutatora postoji trenutak kada se izvor nalazi u kratkom spoju uslijed čega izvor nalazi u kratkom spoju uslijed čega dolazi do iskrenja četkica dolazi do iskrenja četkica
Iskrenje četkica dovodi do polaganog Iskrenje četkica dovodi do polaganog uništavanja grafitnih četkica, ali i do uništavanja grafitnih četkica, ali i do oksidacije i trošenja komutatora, pa je to oksidacije i trošenja komutatora, pa je to glavni nedostatak ove vrste motora. glavni nedostatak ove vrste motora.
Iskrenje se pojačava ukoliko se povećava: Iskrenje se pojačava ukoliko se povećava: brzina okretanja motora, napon, brzina okretanja motora, napon, opterećenje, odnosno struja kao posljedica opterećenje, odnosno struja kao posljedica povećanja napona ili opterećenja povećanja napona ili opterećenja

Motor bez četkicaMotor bez četkica Zbog nedostataka koje uzrokuje komutator Zbog nedostataka koje uzrokuje komutator
razvijen je istosmjerni motor bez četkica koji razvijen je istosmjerni motor bez četkica koji na rotoru ima permanentni magnet, dok se na rotoru ima permanentni magnet, dok se kroz statorske namote propušta struja koja kroz statorske namote propušta struja koja dovodi do zakretanja rotora.dovodi do zakretanja rotora.
Strujom koja prolazi kroz statorske namote se Strujom koja prolazi kroz statorske namote se upravlja elektroničkim sklopom, tzv. upravlja elektroničkim sklopom, tzv. elektroničkim komutatorom ili inverterom, koji elektroničkim komutatorom ili inverterom, koji zamjenjuje klasični komutator. zamjenjuje klasični komutator.
Da bi se moglo ispravno odrediti kroz koji Da bi se moglo ispravno odrediti kroz koji namot će elektronički komutator poslati struju, namot će elektronički komutator poslati struju, i struju kojeg smjera, takav motor mora imati i struju kojeg smjera, takav motor mora imati senzor položaja rotora na osnovu čega se senzor položaja rotora na osnovu čega se upravlja radom samog komutatora.upravlja radom samog komutatora.

Regulacija DC motoraRegulacija DC motora
Brzina okretanja istosmjernog motora Brzina okretanja istosmjernog motora ovisi o kombinaciji napona i struje koji ovisi o kombinaciji napona i struje koji teku kroz armaturu, te o opterećenju. teku kroz armaturu, te o opterećenju. Brzina motora proporcionalna je naponu, Brzina motora proporcionalna je naponu, dok je moment proporcionalan struji dok je moment proporcionalan struji

Brzina motora se može mijenjati Brzina motora se može mijenjati promjenom otpora armature, koje se promjenom otpora armature, koje se izvodi dodavanjem vanjskog promjenjivog izvodi dodavanjem vanjskog promjenjivog otpora spojenog u seriju s izvorom, ili otpora spojenog u seriju s izvorom, ili korištenjem promjenjivog naponskog korištenjem promjenjivog naponskog izvoraizvora

Koračni motoriKoračni motori
Su elektromehanički pretvaraci koji Su elektromehanički pretvaraci koji pulsnu električnu pobudu pretvaraju pulsnu električnu pobudu pretvaraju u koračni mehanički pomak(rotaciski u koračni mehanički pomak(rotaciski ili translaciski)ili translaciski)
Tipovi koračnih motora:Tipovi koračnih motora:
1. 1. PermanentnomagnetskiPermanentnomagnetski
2. 2. Sa promjenjiom reluktancijomSa promjenjiom reluktancijom
3. 3. hibridnihibridni

PermanentnomagnetskiPermanentnomagnetski
• Prikladni su za digitalno upravljanje Prikladni su za digitalno upravljanje • Digitalni ulazni impulsi , analogni Digitalni ulazni impulsi , analogni
izlaz gibanje osovine motora izlaz gibanje osovine motora • Uključenje napajanja naredne faze Uključenje napajanja naredne faze
motora pomak za 1 korak motora pomak za 1 korak • Broj upravljačkih impulsa = broju Broj upravljačkih impulsa = broju
koraka (jedan korak odgovara koraka (jedan korak odgovara određenom fiksnom kutnom zakretu) određenom fiksnom kutnom zakretu)

Radijalno magnetizirani permanentno Radijalno magnetizirani permanentno magnetski rotor i višefazni statormagnetski rotor i višefazni stator
Uzastopnim ukapčanjem ili okretanjem Uzastopnim ukapčanjem ili okretanjem smjera struje pojednih statorskih faza ili smjera struje pojednih statorskih faza ili njihovih kombinacija po određenom njihovih kombinacija po određenom redosljedu,rezultantno magnetsko polje redosljedu,rezultantno magnetsko polje statora se skokovito mijenjaju jednome ili statora se skokovito mijenjaju jednome ili u drugom smjeruu drugom smjeru
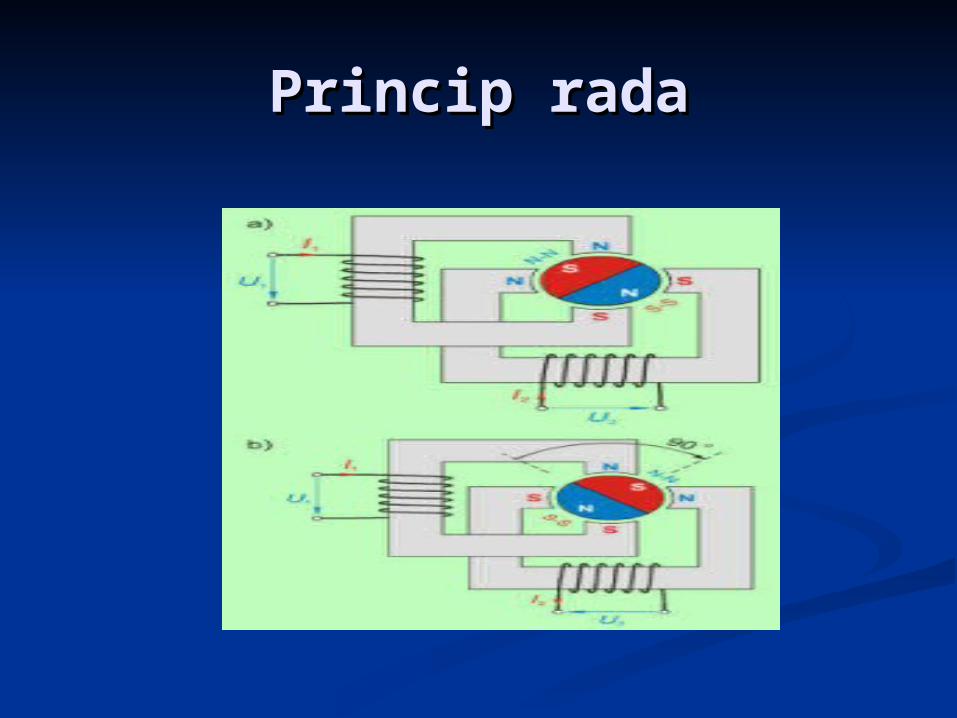
Princip radaPrincip rada
Reluktantni koračni Reluktantni koračni motormotor
Imaju nazubljeni višefazni namotni stator Imaju nazubljeni višefazni namotni stator i nazubljen rotor od mekog i nazubljen rotor od mekog željeza(visepolni rotor)željeza(visepolni rotor)
Ugao koračanja im ovisi o broju zuba Ugao koračanja im ovisi o broju zuba statora i rotora,o načinu namatanja statora i rotora,o načinu namatanja statorskih faza te naćinu njihove pobudestatorskih faza te naćinu njihove pobude
Trofazna verzija ima na primjer dvanaest Trofazna verzija ima na primjer dvanaest statorskih i osam rotorskih zubastatorskih i osam rotorskih zuba
ima rotor iz mekog željeza s brojem polova (zubi) različitim od broja polova statora.
Općenito broj polova (zubi) rotora treba biti takav da jednom polu statora ne pripada cijeli broj zubi rotora.
U suprotnom slučaju došlo bi u mirovanju do
"lijepljenja" rotora i motor se ne bi mogao okretati.

Tipična izvedba prema slicis nacrtanim svicima za samo jedan par polova slična je koračnom reluktantnom motoru. Razlika je u tomu što je ovaj motor predviđen za
kontinuiranogibanje i zahtijeva povratnu vezu položaja rotora (položaj rotora određuje koja će faza biti uzbuđena)

Hibridni motoriHibridni motori
Kombinacija načela na kojima se Kombinacija načela na kojima se zasniva rad permanentnomagnetskih s zasniva rad permanentnomagnetskih s promjenjivom reluktancijompromjenjivom reluktancijom
S nazubljenim statorom na kojem se S nazubljenim statorom na kojem se nalaze elektromagnetski svici i nalaze elektromagnetski svici i nazubljenim rotorom postignu se dobra nazubljenim rotorom postignu se dobra svojstva promjenjive reluktancije svojstva promjenjive reluktancije permanentnog magnetskog poljapermanentnog magnetskog polja
Zubi su najčešce permanentni magneti Zubi su najčešce permanentni magneti ali ponekad mogu biti i bez uzbudeali ponekad mogu biti i bez uzbude

AC motorAC motor
Pretvaraju elektricnu energiju u Pretvaraju elektricnu energiju u mehanickumehanicku
Zasnivaju se na preimjeni okretnih Zasnivaju se na preimjeni okretnih magnetskih poljamagnetskih polja
Dijele se u dvije grupe: sinkroni i Dijele se u dvije grupe: sinkroni i asinkroniasinkroni

Okretno magnetsko polje storeno u Okretno magnetsko polje storeno u statorskim namotima protjecanjem statorskim namotima protjecanjem izmjenicno fazno pomaknutim strujama izmjenicno fazno pomaknutim strujama vrti se sinkronom brzinom vrtnjevrti se sinkronom brzinom vrtnje
Rotor se vrti brzinom koja je uvijek Rotor se vrti brzinom koja je uvijek manja od sinkronemanja od sinkrone
Razlika brzine vrtnje rotora i brzine Razlika brzine vrtnje rotora i brzine vrtnje okretnog polja naziva se klizanjevrtnje okretnog polja naziva se klizanje

Princip radaPrincip rada Elektricna energija ulazi u stator odakle se Elektricna energija ulazi u stator odakle se
elektromagnetskim putem prenosi na rotor i elektromagnetskim putem prenosi na rotor i pretvara u mehanicku energijupretvara u mehanicku energiju
Brzina rotora pri određenoj frekvenciji Brzina rotora pri određenoj frekvenciji mreže na koju je priključen mijenja se u mreže na koju je priključen mijenja se u uskom podrucju s promjenom opterecenjauskom podrucju s promjenom opterecenja
Brzina rotora nije jednaka brzini okretnog Brzina rotora nije jednaka brzini okretnog magnetskog polja statoramagnetskog polja statora
Stator je najčešce šuplji valjak sastavljen Stator je najčešce šuplji valjak sastavljen od tankih(0.5mm) međusobno izoliranih od tankih(0.5mm) međusobno izoliranih dinamo limovadinamo limova
Rotor cini valjak paketa navucen na osovinuRotor cini valjak paketa navucen na osovinu

Vrste AC motoraVrste AC motora
1.Kliznokoluni asinkroni motor1.Kliznokoluni asinkroni motor
2.Kavezni asinkroni motor2.Kavezni asinkroni motor

Kliznokolutni asinkroni Kliznokolutni asinkroni motormotor
ima rotorski namot izveden po istim načelima kao i statorski.
Može biti spojen u spoj zvijezda ili trokut. Početak namota svake faze spojen je s kliznimkolutom (bakrenim prstenom). Tri klizna koluta smještena na osovinu međusobno su i premaosovini izolirana.
Po kolutima klize četkice (klizni kontakt) na koje se spaja izvan motorapostavljen otpornik (rotorski uputnik) u trofaznom spoju.
Otporima rotorskog uputnika možese mijenjati momentna karakteristika. Kolutni asinkroni motori koriste se za teške uvjete pokretanja, gdje je potreban veliki potezni moment.
Teži su, skuplji i osjetljiviji u pogonu od kaveznih asinkronih motora.

Shema kolutnog Shema kolutnog asinkronog asinkronog motora: motora:
a) a) detaljnadetaljna
b) b) tropolnatropolna
c) c) jednopolnajednopolna

Kavezni asinkroni motorKavezni asinkroni motor ima za rotorski namot u utore uložene
bakrene ili mesingane štapove bočno kratko spojene prstenima od istog materijala.
Motori malih i srednjih snaga često imaju kavez od legure aluminija izrađen tlačnim ili vibracijskim lijevom.
Kavezni asinkroni motorje najjednostavniji, specifično najlakši i najjeftiniji, te najpouzdaniji i najčešće korištenielektromotor.
Broj faza i broj pari polova kaveznog rotora prilagođuju se broju faza i broju pari polova statorskog namota.


KRAJKRAJ