Embed Size (px)
DESCRIPTION
Cooperative Control of DC Microgrid Storage forEnergy Balancing and Equal Power Sharing
Citation preview

Cooperative Control of DC Microgrid Storage forEnergy Balancing and Equal Power Sharing
Thomas Morstyn, Branislav Hredzakand Vassilios G. Agelidis
Australian Energy Research InstituteSchool of Electrical Engineering and Telecommunications
University of New South WalesSydney, NSW 2052 Australia
[email protected], [email protected] [email protected]
Georgios DemetriadesABB AB Corporate Research
Forskargrand 721 78, Vasteras, [email protected]
Abstract—This paper proposes a distributed multi-agent co-operative control system for dynamic energy balancing betweenstorage devices in droop controlled DC microgrids. With thetraditional droop control strategy, line resistances between DCmicrogrid energy storage devices and loads will cause unequalpower sharing. The proposed control system modifies the outputpower of the droop controlled storage devices so that they reacha balanced energy level. Once a balanced energy level has beenreached, the cooperative control system maintains equal powersharing between the storage devices. This ensures that the storagedevices will not prematurely run out of energy, so their full outputpower capacity is available to regulate the microgrid voltage.Simulations have been completed showing that the cooperativecontrol system is able to maintain voltage regulation in situationsfor which the traditional droop control fails.
Index Terms—Batteries, DC microgrids, distributed coopera-tive control, droop control, multi-agent systems.
I. INTRODUCTION
Distributed renewable generation sources can provide in-creased network reliability, pollution reduction and facilitateelectrification in remote areas. However, the intermittent natureof renewable generation sources can reduce network powerquality, stability and availability. Microgrids have gained pop-ularity as a means for increasing the penetration of intermittentdistributed renewable generation sources while maintainingnetwork power quality [1]. A microgrid is a group of loads,generation sources and energy storage (ES) devices which canoperate while connected to the main grid, or autonomously inan islanded mode when disconnected [2].
DC microgrids present a range of benefits over AC micro-grids for low voltage distribution systems. Many renewablegeneration sources including photovoltaic cells and fuel cells,as well as ES technologies such as batteries and flywheels, pro-duce DC power and require inverters in an AC microgrid [3].Also, DC loads such as computers, LED lighting and variablespeed drives are becoming more prevalent. With fewer powerconverters network efficiency and reliability are improved [4].DC networks do not suffer from the skin effect [5] and sincethe voltage level of a DC system is stable, a higher RMS volt-age level can be used than in an AC system for a given level of
insulation [6]. DC microgrids have been proposed for a rangeof applications, including electrification of villages in remoteareas and developing nations [7], high power quality distri-bution for hospitals, banks and semiconductor factories [8]and increased renewable energy integration [9]. Challengesassociated with DC microgrid protection are addressed in [10].
When operating in islanded mode, ES devices can be usedto balance the microgrid power demand, allowing intermittentrenewable generation sources to operate at their maximumpoint point while maintaining network stability [5]. Utilisingdistributed ES devices rather than a single centralised ESdevice improves microgrid reliability since it removes a singlepoint of failure and allows loads to be fed by nearby ESdevices. V – P droop control can be used to facilitate powersharing between distributed ES devices in DC microgrids [11].The ES devices reduce their output power when the microgridvoltage rises. Since the steady state voltage of a DC networkvaries with the power injected into it, voltage regulation ismaintained and the microgrid demand is shared between theES devices without requiring time critical communicationlinks.
However, droop control has several limitations when used tofacilitate power sharing between ES devices in DC microgrids.Since the output power set by the droop control is based onthe locally measured voltage, the voltage drop across the linesbetween the ES devices will lead to unequal power betweenthem [12]. This means that even if the ES devices begin at thesame energy level some will prematurely run out of energy.Once a storage device has run out of energy it can no longeruse its power capacity to maintain voltage regulation in themicrogrid. This is a particular problem in the case of batterystorage, which suffers from significant lifetime deteriorationif certain energy level limits are violated [13]. Unequal powersharing will also lead to increased temperature in batterystorage devices and power converters, reducing componentlifetimes and efficiency [14].
A control strategy for energy balancing between droopcontrolled DC microgrid storage devices is proposed in [15].Energy balancing is achieved by modifying the V – P droop
Australasian Universities Power Engineering Conference, AUPEC 2014, Curtin University, Perth, Australia, 28 September – 1 October 2014 1

Battery
PI Voltage Controller PWM
+ -
+
∗
− ( − ∗) ×
A V
⋮ Neighbour States
Cooperative Controller
Local State ∗
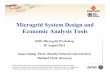
Fig. 1. BESS block diagram.
control of each storage device based on the average energylevel of the other storage devices. In [16] a strategy for equalpower sharing between ES in DC microgrids is proposed basedon the same principle, with each ES device adjusting its outputpower based on the average output power of the other ESdevices. Although these control strategies do not require acentral controller they are not fully distributed, in the sense thateach ES device requires information from all other devices inthe microgrid, and therefore a fully connected communicationnetwork is required [17]. Distributed control systems basedon neighbour to neighbour communication require only asparse communication network and have advantages in termsof robustness, extensibility and flexibility [18].
In this paper a distributed cooperative control system isproposed which provides energy balancing and equal powersharing between distributed storage devices in DC microgrids.The droop controlled ES devices modify their output powerbased on neighbour to neighbour communication so that theyreach a balanced energy state, and maintain equal powersharing once it has been achieved. By balancing the energylevel between the ES devices, the cooperative control systemensures that none of the ES devices will prematurely runout of energy so the full power capacity of the ES devicesis available to regulate the microgrid voltage. Equal powersharing between the ES devices in steady state will alsoincrease the lifetime of battery storage devices and powerconverter components in the DC microgrid. Simulations havebeen completed demonstrating that the cooperative control sys-tem provides improved voltage regulation over the traditionaldroop control strategy.
II. BATTERY ENERGY STORAGE SYSTEM
Battery energy storage systems (BESS) can be used toprovide DC microgrid storage. A block diagram of a BESS isshown in Fig. 1. The BESS includes a battery, bidirectionalDC-DC converter and control system.
A bidirectional DC-DC converter is required to incorporatebattery storage into the DC microgrid, and is controlled toinject or absorb power as required to balance power generationand demand. In [19] a high power bidirectional pulse widthmodulated (PWM) DC-DC converter topology is proposedwith a smooth transition between the charging and dischargingmodes, allowing the same controller to be used for both.
The BESS includes a V – P droop controller which setsthe DC-DC converter output voltage reference based on ameasurement of the DC-DC converter output power, which hasbeen passed through a low pass filter to remove fast transientdisturbances. A PI voltage controller sets the duty cycle ofthe DC-DC converter to achieve the desired output voltage.The droop controller is modified by a power reference set bythe cooperative control system to achieve energy balancingbetween the BESS based on the local BESS state and thestate of its neighbours in the communication network. For thetraditional droop control strategy the power reference is set tozero.
A. BESS Small-Signal Model
The cooperative control system was designed based on asix state small-signal state-space model of the BESS. Small-signal models were derived for the droop controller (5), voltagecontroller (9) and battery (12). These were combined with theDC-DC converter small-signal model (13) from [19] to obtainthe overall small-signal state-space model.
Let x be the BESS state vector,
x =[ΔE ΔP Δφ ΔiL Δv1 Δv2
]T.
E is the BESS energy level, P is the filtered output power,φ is an internal state variable of the voltage controller, iL isthe inductor current, v1 is the DC-DC converter output voltageand v2 is the input voltage. The overall small-signal state-spacemodel for the BESS is given by
x = Ax+Bu. (1)
A =
⎡⎢⎢⎣0 0 0 Be
0 Ap 0 Bp
0 Bφ1 0 Bφ2
0 BdcCd1Cv1 BdcCd3 Adc +BdcCd2
⎤⎥⎥⎦
B =[0 0 Bφ3 BdcCd1Cv2
]T.
B. Droop Control
The BESS droop control is based on a filtered measurementof the DC-DC converter output power P ,
P =ωc
s+ ωcp, where p = v1i1. (2)
The V – P droop control equation is given by
v∗ = VMG −m(P − P ∗). (3)
In this equation VMG is the microgrid voltage reference, mis the droop coefficient and P ∗ is the droop control powerreference, which is achieved when the output voltage matches
Australasian Universities Power Engineering Conference, AUPEC 2014, Curtin University, Perth, Australia, 28 September – 1 October 2014 2

the microgrid voltage reference. The droop coefficient is setso that
m =ΔVmax
Pmax. (4)
ΔVmax is the maximum voltage deviation allowed in themicrogrid and Pmax is the maximum output power of theDC-DC converter [11]. The droop controller small-signal state-space model is given by
˙[ΔP
]= Ap
[ΔP
]+Bp
⎡⎣ΔiLΔv1Δv2
⎤⎦ (5)
[Δv∗
]= Cv1
[ΔP
]+ Cv2
[ΔP ∗] (6)
Ap = −ωc, Bp =[0 ωcVH
R10], Cv1 = −m, Cv2 = m.
C. Voltage Controller
A PI voltage controller is used to set the duty cycle ofthe PWM DC-DC converter to achieve the voltage referenceset by the droop control. The state equations for the voltagecontroller are given by
φ = v∗ − v1 (7)
d = Do + kpv(v∗ − v1) + kivφ. (8)
The voltage controller small-signal state-space model is givenby
˙[Δφ
]= Bφ1
[ΔP
]+Bφ2
⎡⎣ΔiLΔv1Δv2
⎤⎦+Bφ3
[ΔP ∗] (9)
[Δd
]= Cd1
[Δv∗
]+ Cd2
⎡⎣ΔiLΔv1Δv2
⎤⎦+ Cd3
[Δφ
](10)
Bφ1 = −m, Bφ2 =[0 −1 0
], Bφ3 = m,
Cd1 = kpv, Cd2 =[0 −kpv 0
], Cd3 = kiv.
D. Battery
The first order lithium ion battery energy model from [20]is used. To prevent significant deterioration of the battery’slife, the energy level should be kept between 20% and 80% ofthe full capacity. Within these bounds the battery is modelledas an ideal 48V source. The battery energy state equation isgiven by
E =vbattv2 − v2batt
R2. (11)
The battery small-signal state-space model is given by
˙[ΔE
]= Be
⎡⎣ΔiLΔv1Δv2
⎤⎦ , Be =
[0 0 vbatt
R2
]. (12)
E. DC-DC Converter
The DC-DC converter model parameters include the in-ductance L, inductor parasitic resistance RL, MOSFET on-resistance Rdson, low voltage side capacitance CL, highvoltage side capacitance CH , bus connection resistance R1
and battery internal resistance R2. A small-signal state-spacemodel for the DC-DC converter is provided in [19],
˙⎡⎣ΔiLΔv1Δv2
⎤⎦ = Adc
⎡⎣ΔiLΔv1Δv2
⎤⎦+Bdc
[Δd
]. (13)
III. COOPERATIVE CONTROL
In a distributed multi-agent cooperative control system au-tonomous agents pursue a common goal through communica-tion with their neighbours in a sparse communication network.In this paper the goal of the cooperative control system is forthe BESS agents to reach a balanced energy state and once ithas been achieved to maintain it through equal power sharing.
The communication network can be described by a directedgraph G = {V, E}, where V = {1, ..., N} is the set of Nnodes, each associated with a BESS, and E is the set of edgesof the graph. An edge (i, j) ∈ E if there is a link allowinginformation to flow from node i to node j. Let the neighboursof node i be Ni, where j ∈ Ni if (j, i) ∈ E . Assume the graphis strongly connected, so there is a set of edges providing apath between every pair of nodes. Let the graph adjacencymatrix be
A = [aij ] ∈ RN×N , (14)
aij =
{1, (j, i) ∈ E0, otherwise.
The graph degree matrix is given by
D = diag(di), where di =
N∑j=1
aij . (15)
The graph Laplacian matrix is given by L = D −A.Energy balancing can be achieved with a local voting
cooperative control protocol, where the local droop controlpower reference is set based on the difference between thelocal BESS state and the state of the neighbouring BESS. Ifeach BESS has the same number of incoming communicationlinks as it has outgoing links the consensus reached will beequal to the average of their initial states [17]. With the localvoting protocol the droop control power reference for BESS iis given by
P ∗i = cK
∑j∈Ni
aij(xj − xi) (16)
where K is the state variable feedback control matrix and c isa scalar coupling gain chosen to ensure stability of the closedloop graph dynamics [17]. The closed loop dynamics of BESSi are described by
xi = Axi + cBK∑j∈Ni
aij(xj − xi). (17)
Australasian Universities Power Engineering Conference, AUPEC 2014, Curtin University, Perth, Australia, 28 September – 1 October 2014 3

380VDC/ 48VDC
~ ~
Bus 1 Bus 2 Bus 3 Bus 4
Transmission Line Communication Link
Islanded Main Grid
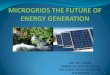
Fig. 2. 4 bus DC microgrid. The BESS are connected by bidirectionalcommunication links.
TABLE ISIMULATION PARAMETERS
Battery
vbatt 48 V
Etotal 25 kWh
Emax 20 kWh
Emin 5 kWh
Transmission Line
Rline 0.5 Ω
Lline 30 μH
Droop Controller
Pmax 20 kW
m 1.0×10−3
VMG 380 V
ωc 10 rad/s
Voltage Controller
kpv -1.0×10−6
kiv -1.0×10−5
DC-DC Converter
L 6.25 μH
RL 9.00 mΩ
Rdson 8.75 mΩ
R1 50.0 mΩ
R2 1.00 mΩ
CH 72.0 mF
CL 7.20 mF
IV. CASE STUDIES
Simulations were carried out to demonstrate the perfor-mance of the proposed dynamic energy balancing cooperativecontrol system and the improvement it can provide in termsof voltage regulation over traditional droop control.
The simulations were carried out for a four bus islandedDC microgrid shown in Fig 2. The BESS are connectedto their neighbours in the DC microgrid via bidirectionalcommunication links. A microgrid voltage range of 380V ±5%(360V to 400V) has been selected based on the standardsproposed for DC low voltage distribution by the ETSI andEMerge Alliance [6]. Each bus has a 2kW constant powerload. A BESS consisting of a 20kW rated bidirectional DC-DC converter and 25kWh lithium ion battery is connected toeach bus. The buses are connected by 100m of 5.5mm2 CUcable. As in [3] the cables have been modelled as series RLcircuits. The simulations have been carried out using the non-linear averaged model for the BESS DC-DC converters whichwas validated in [19]. The simulation parameters are providedin Table I.
Consider the case where the microgrid is islanded for fourhours and the BESS begin with energy levels between theirmaximum 80% energy level of 20kWh and minimum 20%energy level of 5 kWh. Since the DC microgrid is islanded the2kW load at each bus must be supplied by the BESS. Case
A presents the traditional droop control simulation. Case Bpresents the cooperative control simulation and demonstratesthe improvement in terms of voltage regulation which thecooperative control system provides.
A. Case A: Traditional Droop Control
Initially the loads are evenly distributed in the DC micro-grid, and are each fed by their local BESS so the traditionaldroop control strategy provides equal power sharing. TheBESS energy levels fall at an equal rate as shown in Fig. 3(a).The bus 4 BESS reaches the 20% minimum acceptable energylevel of 5kWh after 80 minutes. To prevent deterioration ofthe lithium ion battery lifetime a PI controller is used toreduce the BESS output power to zero. As shown in Fig. 3(b)in accordance with the droop control strategy the microgridbus voltages fall in response to the change in supply poweruntil power is once again balanced in the microgrid. However,since the loads are no longer evenly distributed with respectto the remaining BESS in the microgrid, the load is notshared equally between them, as shown in Fig. 3(c). After 200minutes the bus 2 and 3 BESS have also run out energy, andthe bus 3 and 4 voltages fall below the minimum acceptablelimit of 360V.
B. Case B: Cooperative Control
Linear quadratic regulator design was used to design thecooperative control system state variable feedback controlmatrix K. With the cooperative control system the energylevels of the BESS converge so that none of the BESS reachthe minimum energy level over the four hours of islandedoperation, as shown in Fig. 4(a). Fig. 4(b) shows that themicrogrid bus voltages stay within the limits of 360V to 400V.As the energy levels of the BESS converge the microgrid loadis equally shared between the BESS, as shown in Fig. 4(c).The dynamic energy balancing cooperative control systemsuccessfully regulates the microgrid voltage and providesequal power sharing between the BESS in steady state.
V. CONCLUSION
In this paper a distributed multi-agent cooperative controlsystem has been proposed which provides dynamic energybalancing between storage devices in droop controlled DCmicrogrids. By balancing the energy levels of the storagedevices the cooperative control system ensures that none willprematurely run out of energy, so their full output powercapacity is available to regulate the microgrid voltage. Simu-lations have been completed demonstrating the improvementthe cooperative control system can provide in terms of voltageregulation over traditional droop control. Once the storagedevices reach a balanced energy level the proposed controlsystem maintains equal power sharing between them, whichis not provided by traditional droop control. The cooperativecontrol system only requires a sparse communication networkproviding neighbour to neighbour communication, offeringadvantages in terms of robustness, extensibility and flexibility
Australasian Universities Power Engineering Conference, AUPEC 2014, Curtin University, Perth, Australia, 28 September – 1 October 2014 4

0 60 120 180 240
5
10
15
20E
nerg
y Le
vel (
kWh)
Time (min)
Bus 1
Bus 2Bus 3Bus 4
(a) Case A. Traditional droop control BESS energy levels.
0 60 120 180 240
340
350
360
370
380
390
400
Vol
tage
(V
)
Time (min)
(b) Case A. Traditional droop control BESS bus voltages.
0 60 120 180 240
0
2
4
6
8
10
12
Out
put
Pow
er (
kW)
Time (min)
(c) Case A. Traditional droop control BESS output powers.
Fig. 3. Case A. Traditional droop control simulation. Initially power is equallyshared between the BESS since the loads are equally distributed in the DCmicrogrid. After 80 minutes the bus 4 BESS reaches the minimum energylevel and its output power is driven to zero. Following this, power is notequally shared between the remaining BESS. After 200 minutes the bus 2and 3 BESS have reached the minimum energy level and the bus 3 and 4voltages fall below the minimum voltage level of 360V.
over centralised control strategies. The cooperative control sys-tem design procedure guarantees system stability and allowsthe speed of energy convergence to be traded-off against thepower used for energy balancing.
REFERENCES
[1] R. H. Lasseter, “Smart Distribution: Coupled Microgrids,” Proceedingsof the IEEE, vol. 99, no. 6, pp. 1074–1082, Jun. 2011.
[2] R. Lasseter, “MicroGrids,” in 2002 IEEE Power Engineering SocietyWinter Meeting. Conference Proceedings (Cat. No.02CH37309), vol. 1.IEEE, 2002, pp. 305–308.
0 60 120 180 240
5
10
15
20
Ene
rgy
Leve
l (kW
h)
Time (min)
Bus 1
Bus 2Bus 3Bus 4
(a) Case B. Cooperative control BESS energy levels.
0 60 120 180 240
340
350
360
370
380
390
400
Vol
tage
(V
)Time (min)
(b) Case B. Cooperative control BESS bus voltages.
0 60 120 180 240
-5
0
5
10
Out
put
Pow
er (
kW)
Time (min)
(c) Case B. Cooperative control BESS output powers.
Fig. 4. Case B. Cooperative control simulation. Initally the droop controloutput powers are modified so that the BESS converge to a balanced energylevel. As the BESS reach a balanced energy level power is equally sharedbetween them. Throughout the four hours of islanded operation the busvoltages are kept within the limits of 360V to 400V.
[3] S. Anand and B. G. Fernandes, “Reduced-Order Model and StabilityAnalysis of Low-Voltage DC Microgrid,” IEEE Transactions on Indus-trial Electronics, vol. 60, no. 11, pp. 5040–5049, Nov. 2013.
[4] X. She, S. Lukic, and A. Q. Huang, “DC zonal micro-grid architectureand control,” in IECON 2010 - 36th Annual Conference on IEEEIndustrial Electronics Society, 2010, pp. 2988–2993.
[5] D. Boroyevich, I. Cvetkovic, D. Dong, R. Burgos, F. Wang, and F. Lee,“Future electronic power distribution systems a contemplative view,” in2010 12th International Conference on Optimization of Electrical andElectronic Equipment. IEEE, May 2010, pp. 1369–1380.
[6] D. J. Becker and B. Sonnenberg, “DC microgrids in buildings anddata centers,” 2011 IEEE 33rd International Telecommunications EnergyConference (INTELEC), pp. 1–7, Oct. 2011.
[7] P. A. Madduri, J. Rosa, S. R. Sanders, E. a. Brewer, and M. Podolsky,“Design and verification of smart and scalable DC microgrids for emerg-ing regions,” 2013 IEEE Energy Conversion Congress and Exposition,pp. 73–79, Sep. 2013.
Australasian Universities Power Engineering Conference, AUPEC 2014, Curtin University, Perth, Australia, 28 September – 1 October 2014 5

[8] H. Kakigano, Y. Miura, T. Ise, and R. Uchida, “DC Voltage Control ofthe DC Micro-grid for Super High Quality Distribution,” in 2007 PowerConversion Conference - Nagoya. IEEE, Apr. 2007, pp. 518–525.
[9] K. Strunz, E. Abbasi, and D. N. Huu, “DC Microgrid for Wind and SolarPower Integration,” IEEE Journal of Emerging and Selected Topics inPower Electronics, vol. 2, no. 1, pp. 115–126, Mar. 2014.
[10] D. Salomonsson, L. Soder, and A. Sannino, “Protection of Low-VoltageDC Microgrids,” IEEE Transactions on Power Delivery, vol. 24, no. 3,pp. 1045–1053, Jul. 2009.
[11] Xiaonan Lu, K. Sun, J. Guerrero, and J. . L. Vasquez, “SoC-Based DroopMethod for Distributed Energy Storage in DC Microgrid Applications,”in 2012 IEEE International Symposium on Industrial Electronics (ISIE),2012, pp. 1640–1645.
[12] P.-H. Huang, W. Xiao, and M. El Moursi, “A Practical Load SharingControl Strategy for DC Microgrids and DC Supplied Houses,” inIndustrial Electronics Society, IECON 2013 - 39th Annual Conferenceof the IEEE, 2013, pp. 7124 – 7128.
[13] M. J. Erickson and R. H. Lasseter, “Integration of battery energy storageelement in a CERTS microgrid,” in 2010 IEEE Energy ConversionCongress and Exposition. IEEE, Sep. 2010, pp. 2570–2577.
[14] J. C. Schroeder and F. W. Fuchs, “General Analysis and Design Guide-line for a Battery Buffer System with DC/DC converter and EDLC forElectric Vehicles and its Influence on Efficiency and Battery Lifetime,”IEEE Transactions on Power Electronics, vol. PP, no. 99, pp. 1–11,2014.
[15] C. Li, T. Dragicevic, N. L. D. Aldana, J. C. Vasquez, and J. M. Guerrero,“Voltage Scheduling Droop Control for State-of-Charge Balance ofDistributed Energy Storage in DC Microgrids,” in Proceedings of the2014 IEEE International Energy Conference (ENERGYCON), 2014.
[16] S. Anand, B. G. Fernandes, and J. Guerrero, “Distributed Control toEnsure Proportional Load Sharing and Improve Voltage Regulation inLow-Voltage DC Microgrids,” IEEE Transactions on Power Electronics,vol. 28, no. 4, pp. 1900–1913, Apr. 2013.
[17] F. L. Lewis, H. Zhang, K. Hengster-Movric, and A. Das, CooperativeControl of Multi-Agent Systems, ser. Communications and ControlEngineering. London: Springer London, 2014.
[18] S. D. J. McArthur, E. M. Davidson, V. M. Catterson, A. L. Dimeas,N. D. Hatziargyriou, F. Ponci, and T. Funabashi, “Multi-Agent Systemsfor Power Engineering ApplicationsPart I: Concepts, Approaches, andTechnical Challenges,” IEEE Transactions on Power Systems, vol. 22,no. 4, pp. 1743–1752, Nov. 2007.
[19] Junhong Zhang, J.-S. Lai, and W. Yu, “Bidirectional DC-DC convertermodeling and unified controller with digital implementation,” in 2008Twenty-Third Annual IEEE Applied Power Electronics Conference andExposition. IEEE, Feb. 2008, pp. 1747–1753.
[20] K. Le Dinh and Y. Hayashi, “Coordinated BESS control for improvingvoltage stability of a PV-supplied microgrid,” in 2013 48th InternationalUniversities’ Power Engineering Conference (UPEC). IEEE, Sep. 2013,pp. 1–6.
Australasian Universities Power Engineering Conference, AUPEC 2014, Curtin University, Perth, Australia, 28 September – 1 October 2014 6