Embed Size (px)
Citation preview
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
Contact Modeling of Meshing Gear Wheels using Tangentially Movable Teeth
Saeed Ebrahimi and Peter Eberhard
SIMPACK User Meeting 2006Baden-Baden
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
Contents
extension of SIMPACK force element 225 for contact between gears introduction and motivation
numerical results
summary
introducing teeth coordinates as new force statesconsidering elastic elements between teeth and gear body new search algorithm for finding contact situationsmodification of applying contact forces and torques
simulation of two spur gears for several rotations of the gear axesone side flange contact between two spur gears
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
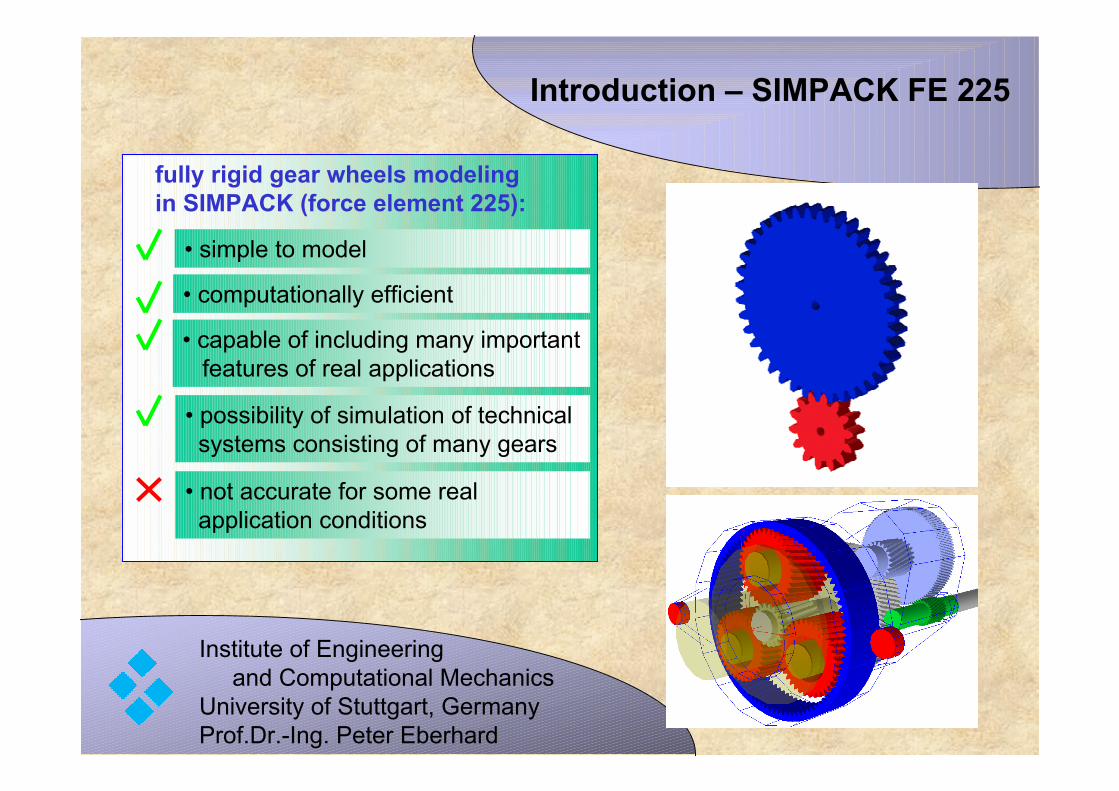
Introduction – SIMPACK FE 225
fully rigid gear wheels modeling in SIMPACK (force element 225):
• simple to model
• computationally efficient
• not accurate for some realapplication conditions
• capable of including many importantfeatures of real applications
• possibility of simulation of technicalsystems consisting of many gears
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
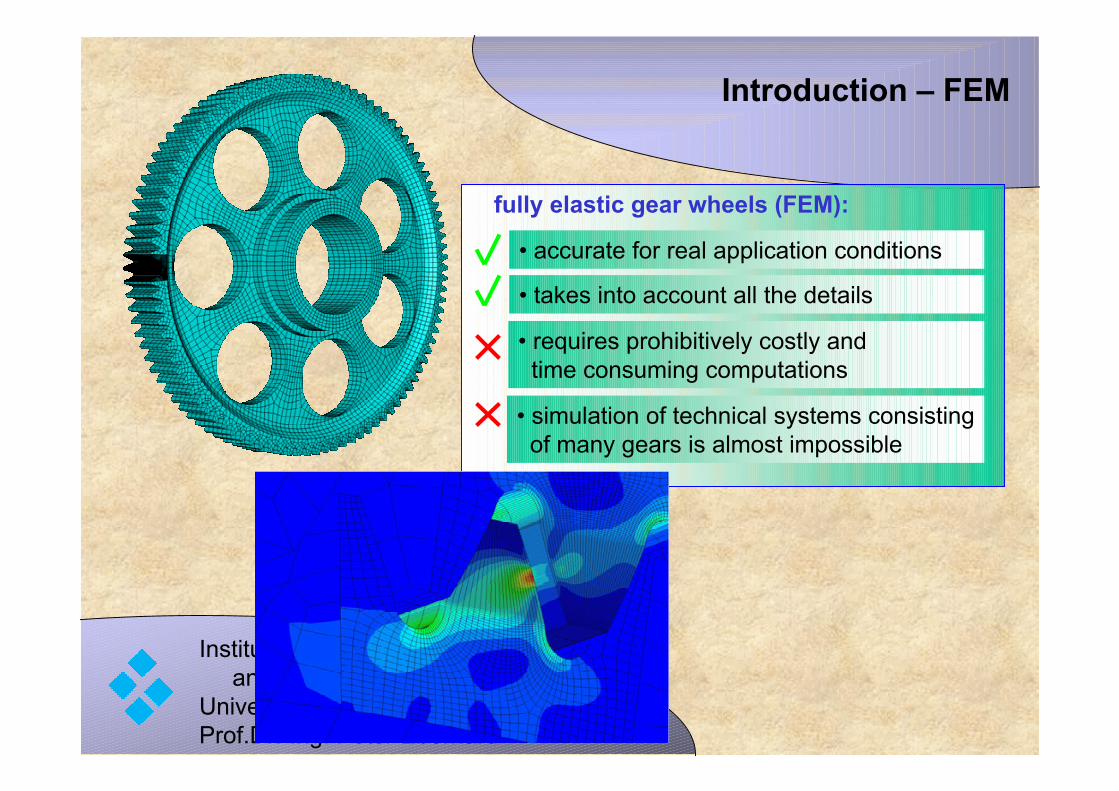
Introduction – FEM
fully elastic gear wheels (FEM):
• accurate for real application conditions
• takes into account all the details
• requires prohibitively costly andtime consuming computations
• simulation of technical systems consistingof many gears is almost impossible
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
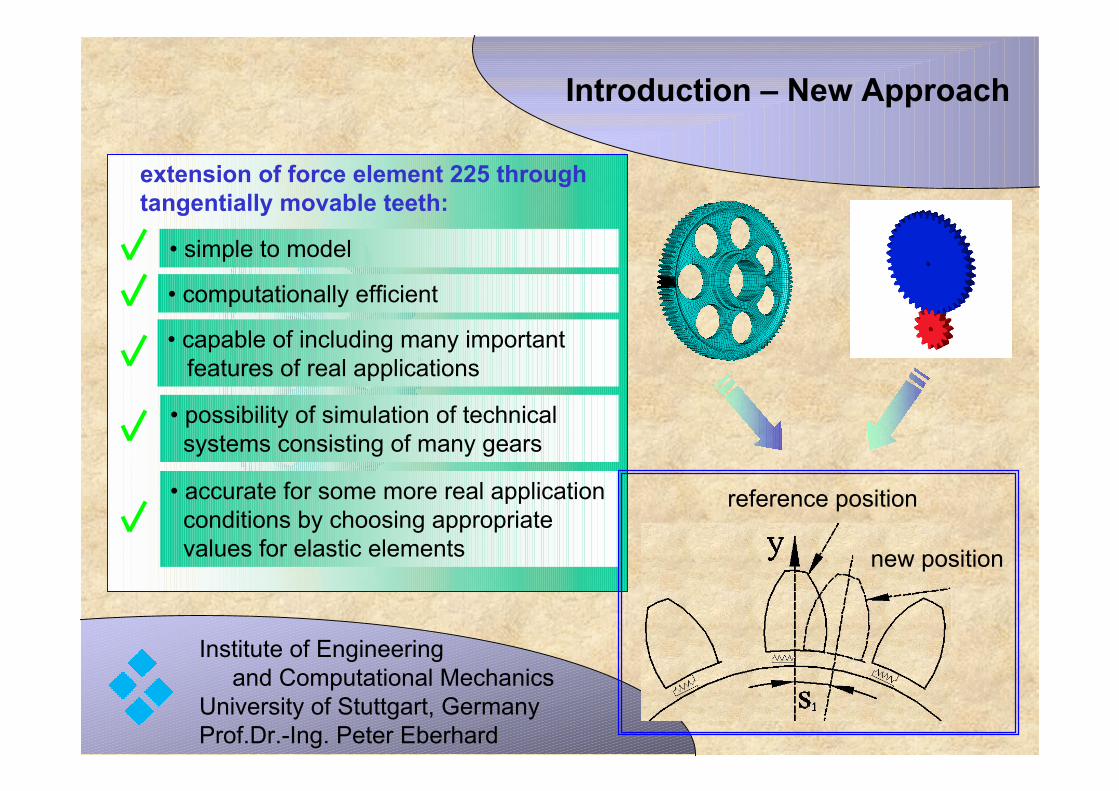
Introduction – New Approach
extension of force element 225 throughtangentially movable teeth:
• simple to model
• computationally efficient
• accurate for some more real application conditions by choosing appropriatevalues for elastic elements
• capable of including many importantfeatures of real applications
• possibility of simulation of technicalsystems consisting of many gears
reference position
new position
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
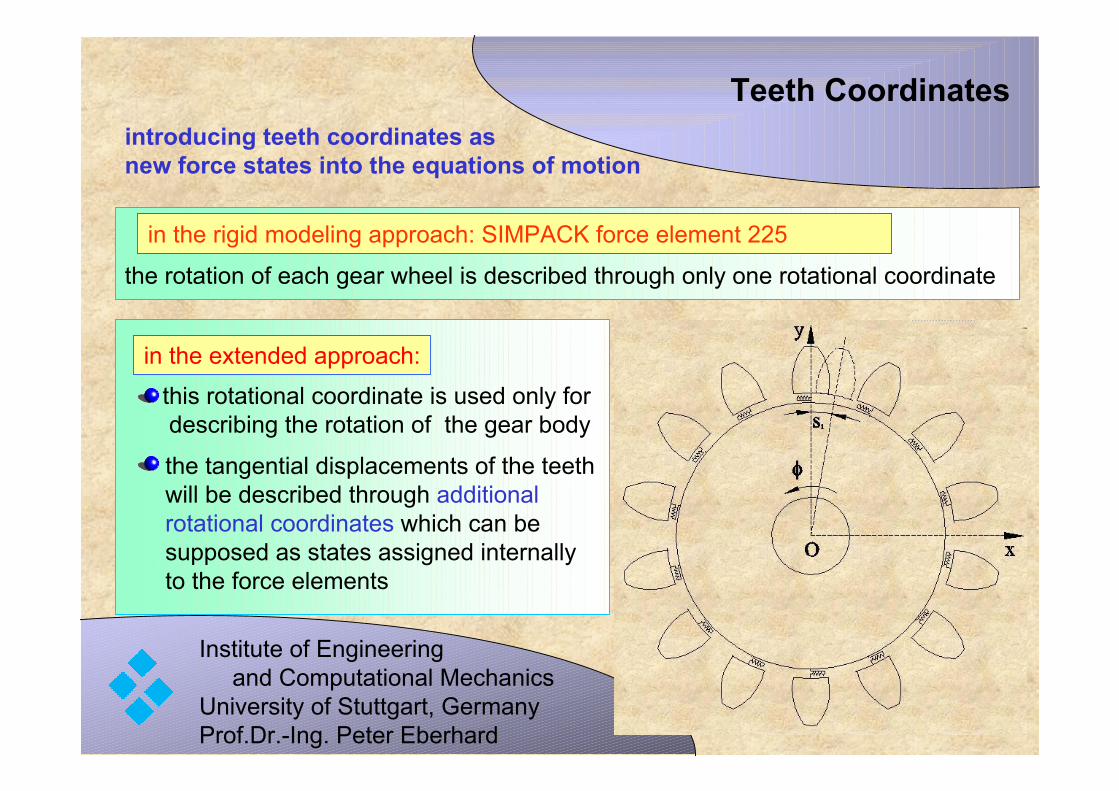
introducing teeth coordinates as new force states into the equations of motion
the rotation of each gear wheel is described through only one rotational coordinate
Teeth Coordinates
in the rigid modeling approach: SIMPACK force element 225
the tangential displacements of the teethwill be described through additional rotational coordinates which can besupposed as states assigned internallyto the force elements
in the extended approach:
this rotational coordinate is used only fordescribing the rotation of the gear body
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
inertial torquemass of each toothdedendum circle radius
spring stiffnesstmdr
k
damping coefficientcφ rotation angle of the gear body
rotational velocity of the gear bodyωrotation angle of the tooth iiS
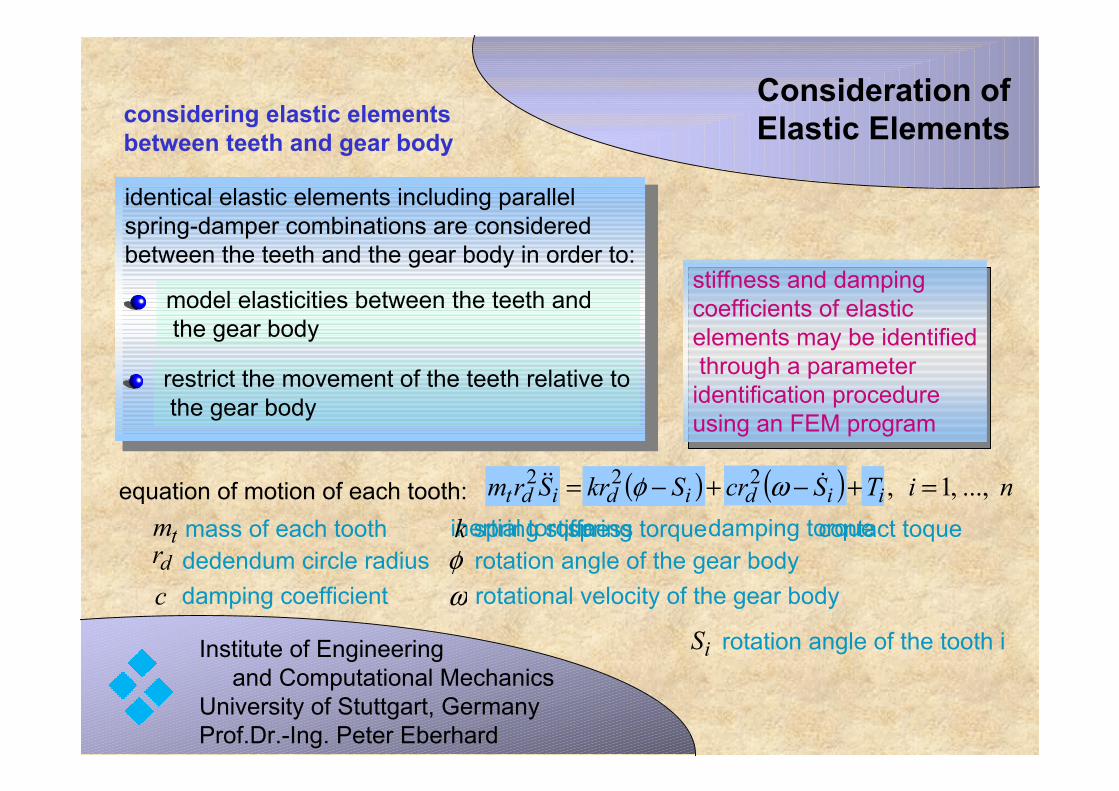
considering elastic elementsbetween teeth and gear body
Consideration of Elastic Elements
identical elastic elements including parallelspring-damper combinations are consideredbetween the teeth and the gear body in order to:
model elasticities between the teeth andthe gear body
restrict the movement of the teeth relative tothe gear body
stiffness and dampingcoefficients of elastic elements may be identifiedthrough a parameter identification procedureusing an FEM program
spring torquedamping torquecontact toqueequation of motion of each tooth: ( ) ( ) niTScrSkrSrm iidididt ...,,1,222 =+−+−= &&& ωφ
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
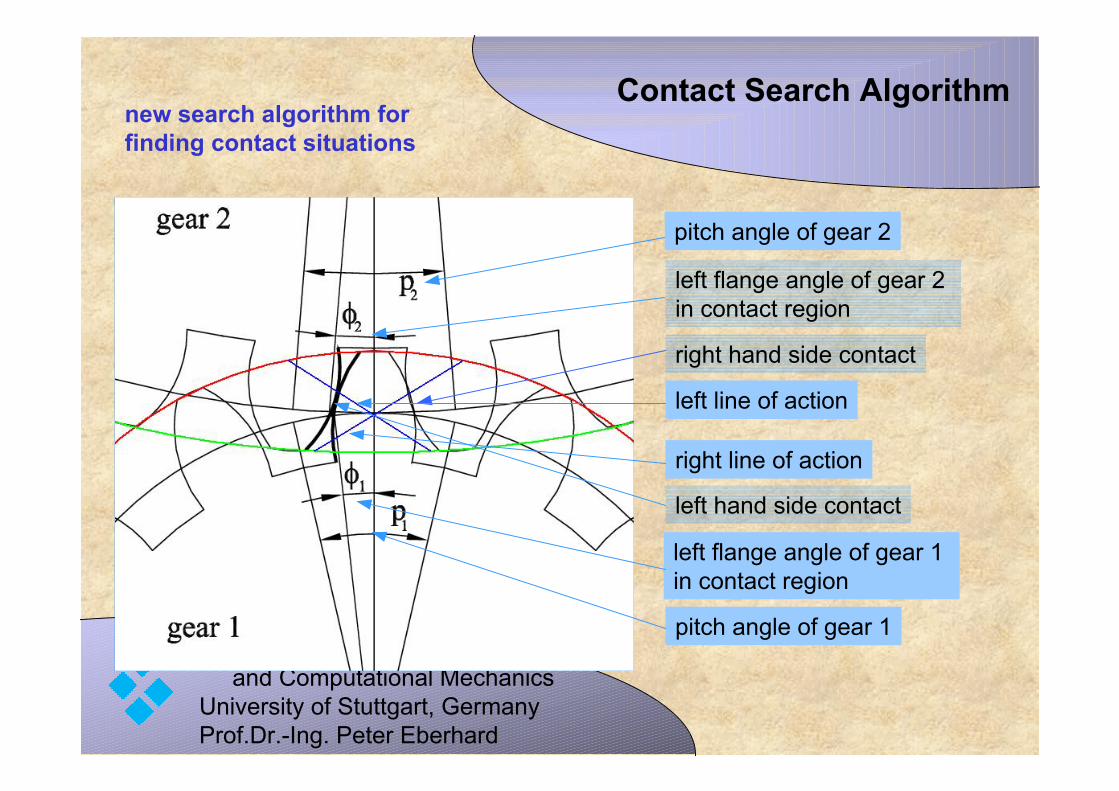
Contact Search Algorithmnew search algorithm forfinding contact situations
pitch angle of gear 1
pitch angle of gear 2
left flange angle of gear 1 in contact region
left flange angle of gear 2 in contact region
left hand side contact
right hand side contact
right line of action
left line of action
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
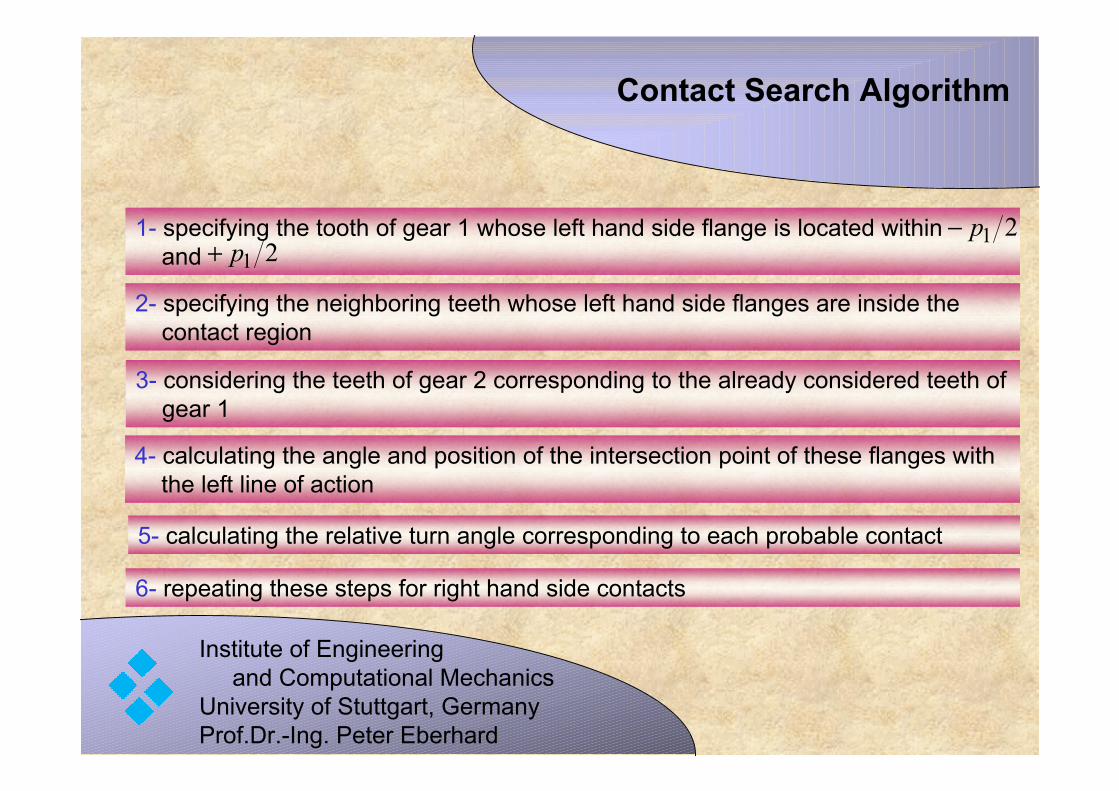
Contact Search Algorithm
2- specifying the neighboring teeth whose left hand side flanges are inside thecontact region
3- considering the teeth of gear 2 corresponding to the already considered teeth of gear 1
4- calculating the angle and position of the intersection point of these flanges withthe left line of action
5- calculating the relative turn angle corresponding to each probable contact
6- repeating these steps for right hand side contacts
1- specifying the tooth of gear 1 whose left hand side flange is located withinand 21p+
21p−
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
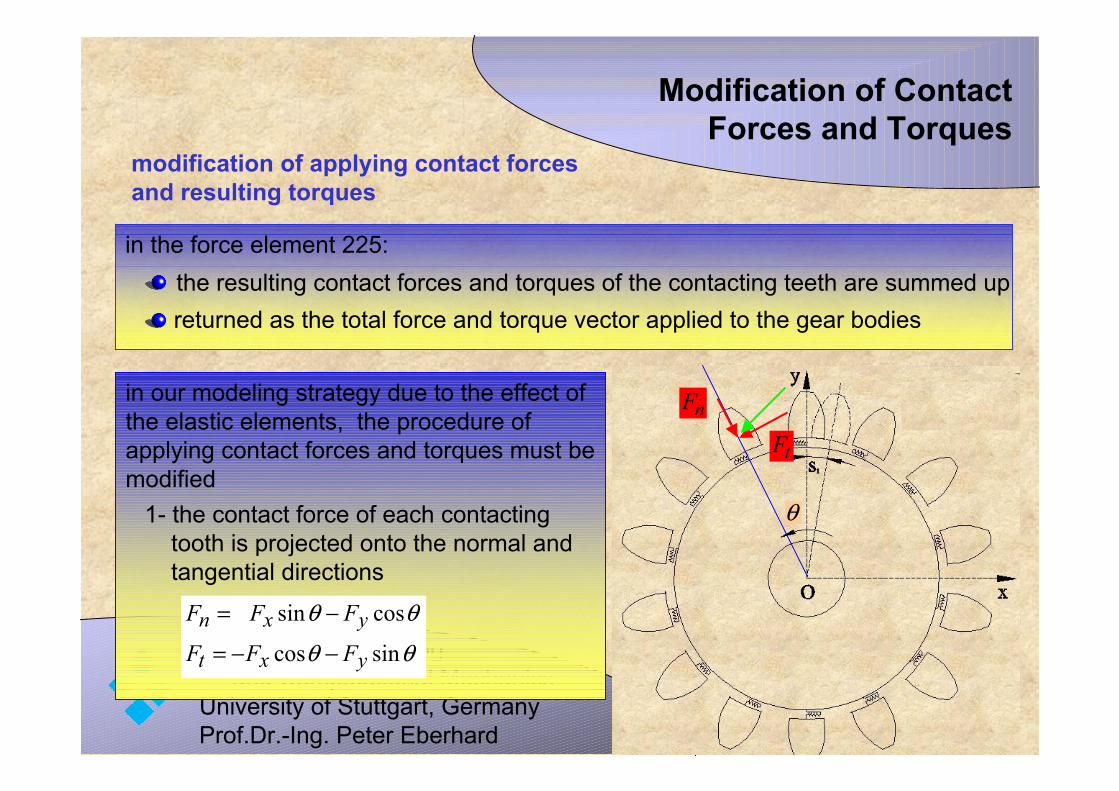
modification of applying contact forcesand resulting torques
in the force element 225:
Modification of ContactForces and Torques
the resulting contact forces and torques of the contacting teeth are summed upreturned as the total force and torque vector applied to the gear bodies
in our modeling strategy due to the effect ofthe elastic elements, the procedure of applying contact forces and torques must bemodified
θθθθ
sincos
cossin
yxt
yxnFFF
FFF
−−=
−=
1- the contact force of each contactingtooth is projected onto the normal and tangential directions
nF
tF
θ
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
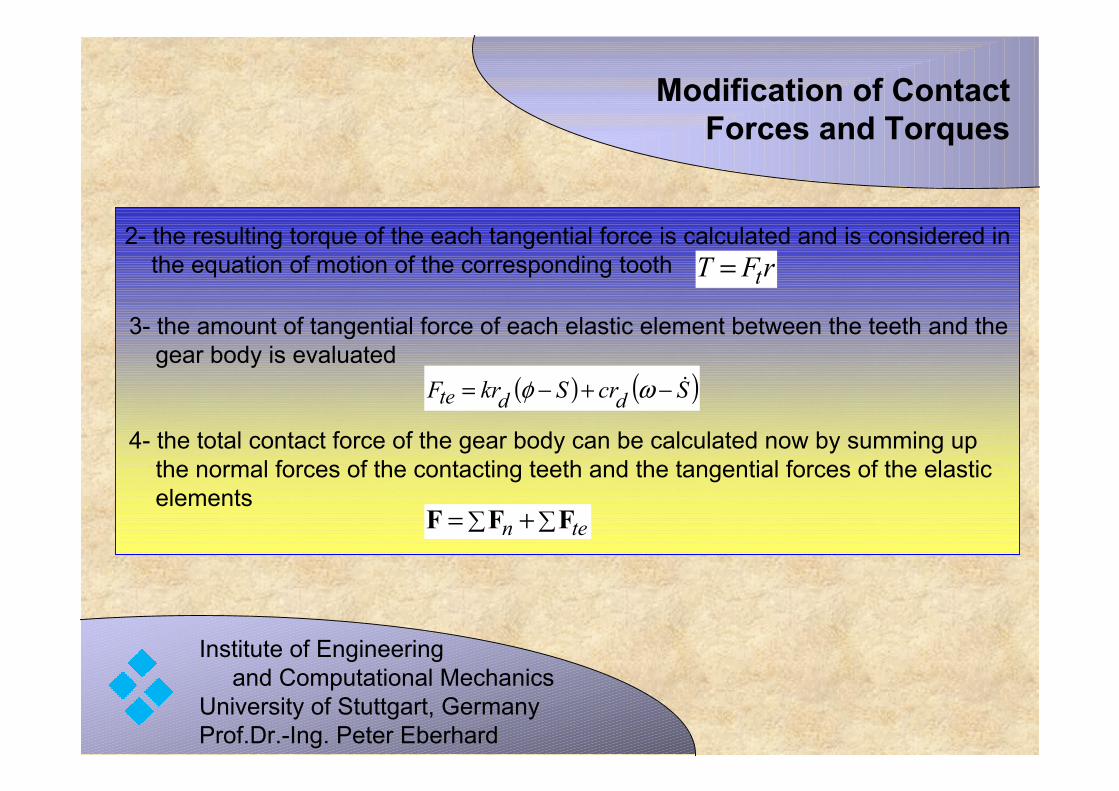
2- the resulting torque of the each tangential force is calculated and is considered inthe equation of motion of the corresponding tooth rFT t=
Modification of ContactForces and Torques
( ) ( )ScrSkrF ddte &−+−= ωφ
3- the amount of tangential force of each elastic element between the teeth and the gear body is evaluated
4- the total contact force of the gear body can be calculated now by summing upthe normal forces of the contacting teeth and the tangential forces of the elasticelements
∑ ∑+= ten FFF
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
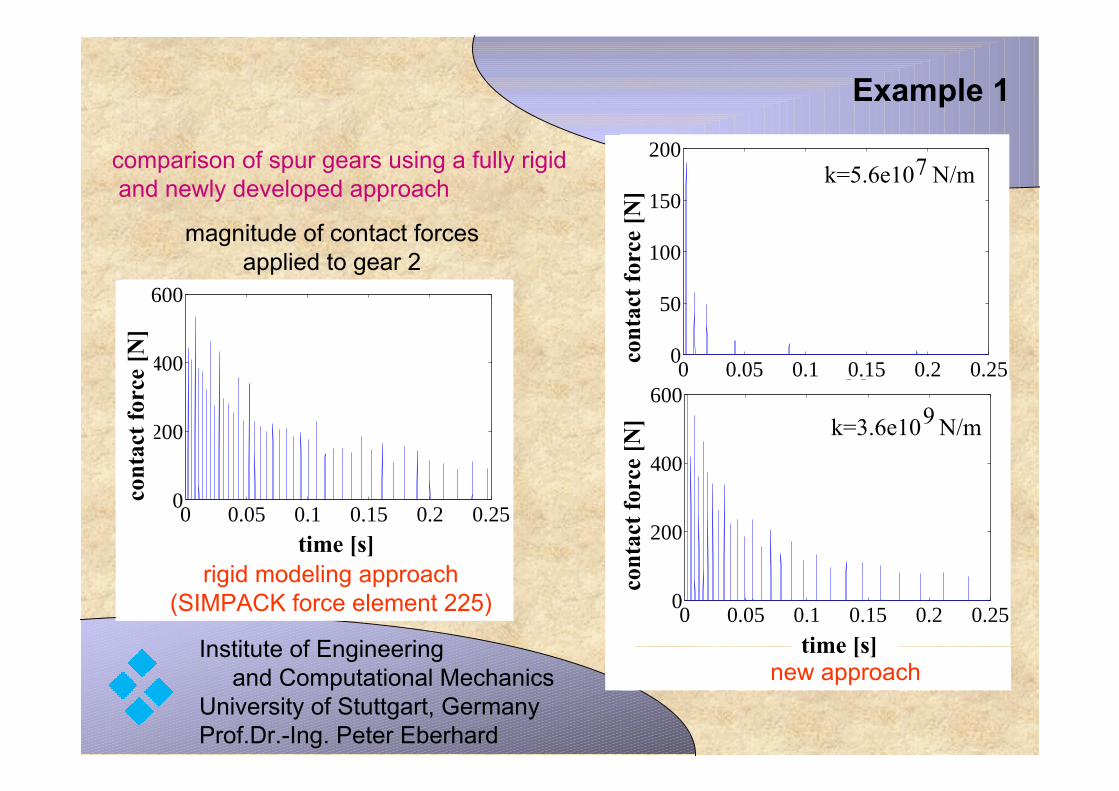
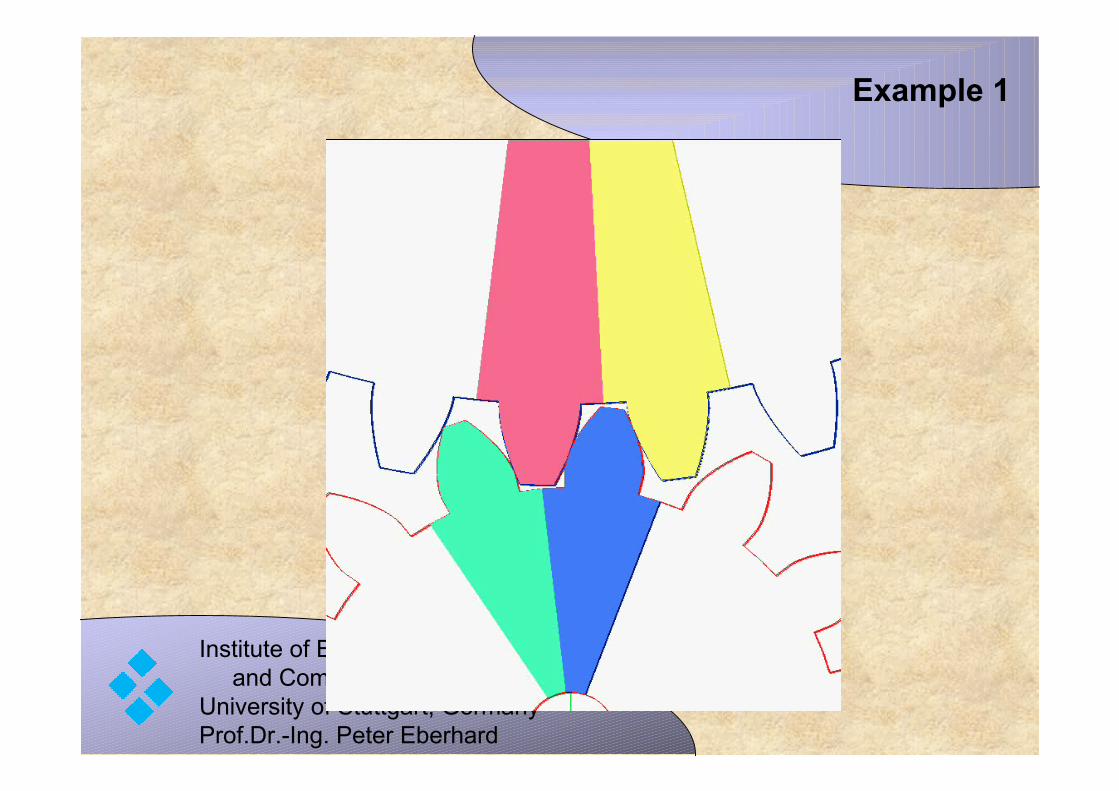
comparison of spur gears using a fully rigidand newly developed approach
magnitude of contact forcesapplied to gear 2
Example 1
0 0.05 0.1 0.15 0.2 0.250
200
400
600
Zeit [s]
Kon
takt
kraf
t [N
]
rigid modeling approach(SIMPACK force element 225)
time [s]
cont
act f
orce
[N]
0 0.05 0.1 0.15 0.2 0.250
50
100
150
200
Zeit [s]
Kon
takk
raft
[N
] k=5.6e10 N/m
new approach
0 0.05 0.1 0.15 0.2 0.250
200
400
600
Zeit [s]K
onta
kkra
ft [
N] k=3.6e10 N/m
time [s]co
ntac
t for
ce [N
]co
ntac
t for
ce [N
]
7
9
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
Example 1
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
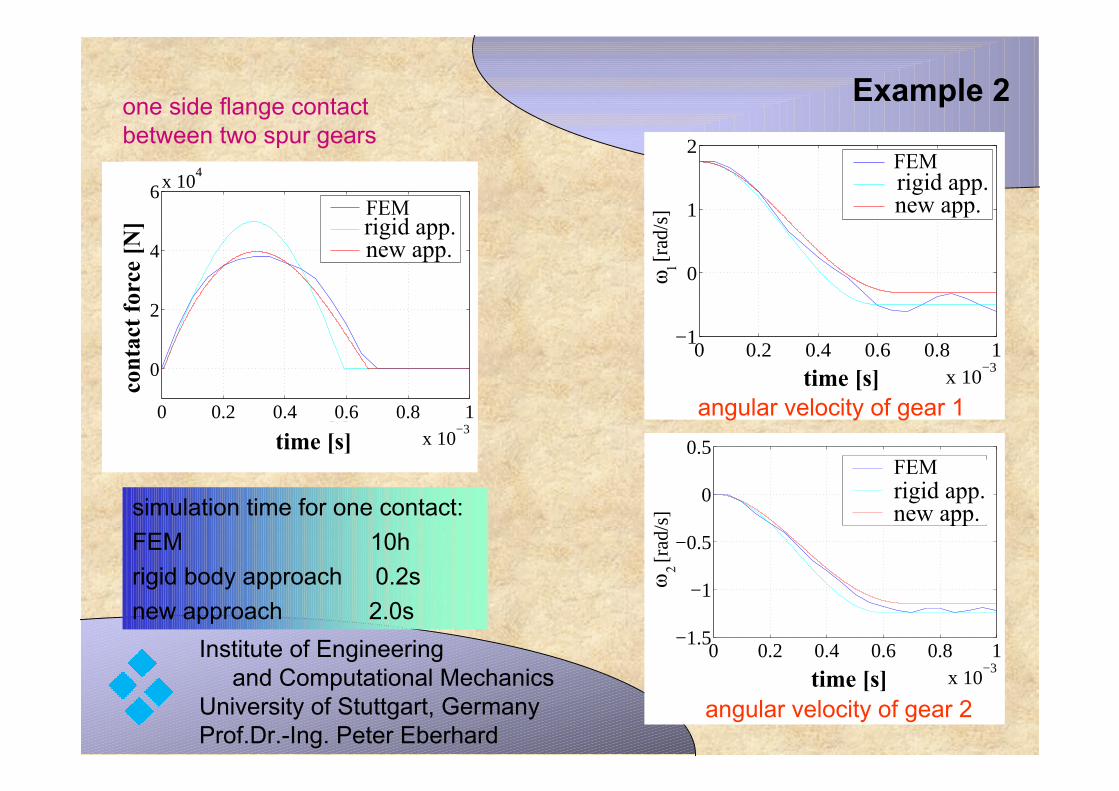
simulation time for one contact:FEM 10hrigid body approach 0.2snew approach 2.0s
one side flange contact between two spur gears
Example 2
0 0.2 0.4 0.6 0.8 1x 10
−3
−1
0
1
2
Zeit [s]
[ra
d/s]
FEM starre Z.bewegl. Z.
1 ω
0 0.2 0.4 0.6 0.8 1x 10
−3
−1.5
−1
−0.5
0
0.5
Zeit [s] [
rad/
s]
FEM starre Z.bewegl. Z.
ω2
angular velocity of gear 2
time [s]angular velocity of gear 1
time [s]
rigid app.new app.
rigid app.new app.
FEM
FEM
0 0.2 0.4 0.6 0.8 1x 10
−3
0
2
4
6x 104
Zeit t [s]
Kon
takt
kraf
t [
N]
FEM starre Z.bewegl. Z.
time [s]
rigid app.new app.
FEM
cont
act f
orce
[N]
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf.Dr.-Ing. Peter Eberhard
Summary
the SIMPACK force element 225 for contact simulation of gear wheels has been extended through a tangentially movable teeth approach in order to
main question in this newly developed approachidentification of the stiffness and damping coefficients of considered elastic elements between the gear body and the teeth (practically based on an FEM reference solution)
the required steps to do so are
1- introducing teeth coordinates as new force states into the equations of motion
2- considering elastic elements between the teeth and the gear body
4- modification of applying contact forces and resulting torques
3- changed search algorithm for finding contact situations
preserve the low computational effort
improve the results to be close to the accurate results of FEM





























