Embed Size (px)
Citation preview

2014年10月21日
特定非営利活動法人 ITS Japan
自動運転プロジェクト 斉藤 俊哉
ITS世界会議デトロイト報告を中心に
Connected and Automated Vehicles

目次
1. 自動運転に関する世界の動向
欧州の動向
米国の動向
日本の動向
2. ITS世界会議デトロイト報告
セッション
ショーケース
3. 今後の動き
1

自動運転に関する世界の動向
2
ITS WC Vienna
ITS WC Tokyo
ITS WC Detroit
TRB WS#1
TRB TRB TRB WS#2
TRB TRB WS#3
WS#1 WS#2 WG#1
2012 2013 2014
ITS EU Dublin
ITS A TN ITS A MA
ITS EU Helsinki
TRA Paris
VRA WS#1
Google car YouTube放映
安倍総理 自動運転車両試乗
Michigan Automated and Connected Vehicle WG
オートパイロットシステム検討会
道路交通分科会 戦略的イノベーション創造プログラム
Michigan Automated and Connected Vehicle WG
Connected Vehicle Public meeting
2012年から多くの場で活発な議論が始まった
Connected Vehicle Public meeting
ITS WC Tokyo
デモ、セミナー
Workshop Tokyo
ITS AP
自動運転中心

欧州の動向
• 欧州連合のフレームワークプロジェクト(FP)のもと、自動運転の取り組みが進められている。
• 2014年度からは、新たなFPとしてHorizon 2020が開始。
3
FPにおける自動運転関連プロジェクト
出典:Adrian Zlocki, Road Vehicle Automation Workshop, 2012

AdaptIVe
4
2014年開始の新たな自動運転関連プロジェクト • Budget: EUR 25 Million
• European Commission: EUR 14,3 Million
• Duration: 42 months (January 2014 – June 2017)
• Coordinator: Aria Etemad, Volkswagen Group Research
• 8 Countries: France, Germany, Greece, Italy, Spain, Sweden, The Netherlands,
United Kingdom
出典:Adrian Zlocki,
International Task Force on
Vehicle-Highway Automation,
2014

iMobility Forum - Automation WG
• 欧州iMobility ForumのAutomation WGでは、自動運転に関する広範な技術分野の議論が行われている。
5
• Viable business models and deployment paths including socio-economic implications
Deployment paths (VOLVO)
• Clarify current regulatory and liability issues among European countries
Regulatory issues (ERTICO)
• Identify needs for standardisation, testing, compliance and certification
Road Worthiness Testing (IDIADA)
• Identify additional requirement on C-ITS
Connectivity (ICCS)
• Identify role of digital maps for automation
Digital infrastructure
(HERE - ERTICO)
• Identify solutions for driver and other road user interactions
Human factors (DLR-TRL-LEEDS)
• List potential direct and indirect benefits of automation
Evaluation of benefits (CTL)
• Identify gaps in current control and decision solutions
Controls and decisions (DLR)
•Clarify reliability concerns and make recommendations
Reliability and CyberSecurity
(HTG6)
Automation WGにおけるサブWG
出典:Maxime Flament, International Task Force on Vehicle-Highway Automation, 2014

米国の動向
2015-2019 ITS Strategic Plan(米国連邦運輸省:USDOT)
• Strategic Plan Priorities:優先事項
Realizing Connected Vehicle Implementation
Advancing Automation
• Strategic Themes:戦略テーマ
Enable Safer Vehicles and Roadways
Enhance Mobility
Limit Environmental Impacts
Promote Innovation
Support Transportation Connectivity
• Program Categories:プログラム分類
Connected Vehicles
Automation
Emerging Capabilities
Enterprise Data
Interoperability
Accelerating Deployment 6

USDOTにおけるAutomation研究プログラム
7
単一の運転支援システム研究
自動運転の安全性を高める研究
無人運転を見据えた研究
出典:USDOT ITS Joint Program Office Fact Sheet

8
USDOT-NHTSA の自動運転関連開発テーマ
出典:Nat Beuse, Automated Vehicle Symposium 2014
Human Factors Research
• Human factors evaluation of Level 2 and Level 3 automated driving concepts
• Initial human factors design principle for L2/L3
Electronic Control Systems Safety (including Cybersecurity)
• Functional safety of safety-critical automotive systems and extensions to L2-L4
• Cyber security threats, vulnerabilities, countermeasures assessment
Benefits Assessment
• Target crash population estimation for automated vehicles L2-L4
• Multi-modal benefits framework development
Systems Performance Requirements
• System performance requirements framework
• Objective test procedures
Testing and Evaluation
• Controlled test track studies
• Field operational tests

日本の動向
戦略的イノベーション創造プログラム(SIP) 日本再興戦略および科学技術・イノベーション総合戦略(平成25年6月閣議決定)に基づき創設
SIPの対象10課題の一つとして「自動走行システム」が選定され、プログラムディレクターにトヨタ自動車(株)渡邉浩之顧問(ITS Japan会長)が就任
9
出典:SIP自動走行システム推進委員会資料

SIP自動走行システム
研究開発テーマ
10
SIP自動走行システム推進委員会
① システム実用化WG [Ⅰ][Ⅱ]
• 地図情報の高度化技術の開発
• (交通事故死者低減・渋滞低減のための)ミクロ・マクロデータ解析とシミュレーション技術の開発
• ドライバーと自動走行システムの役割に関する研究
• 歩行者通信端末による歩行者の動性把握と歩行者への移動支援の実現
② 国際連携WG [Ⅲ]
国際連携の構築
- 国際的に開かれた研究開発環境の整備(国際オープン型研究所)
- 自動走行システムの社会受容性の醸成
③ 次世代都市交通WG [Ⅳ]
• 地域交通マネジメントの高度化
• 次世代公共道路交通システムの開発
• 交通弱者・歩行支援システムの開発
推進体制
出典:SIP自動走行システム研究開発計画
11
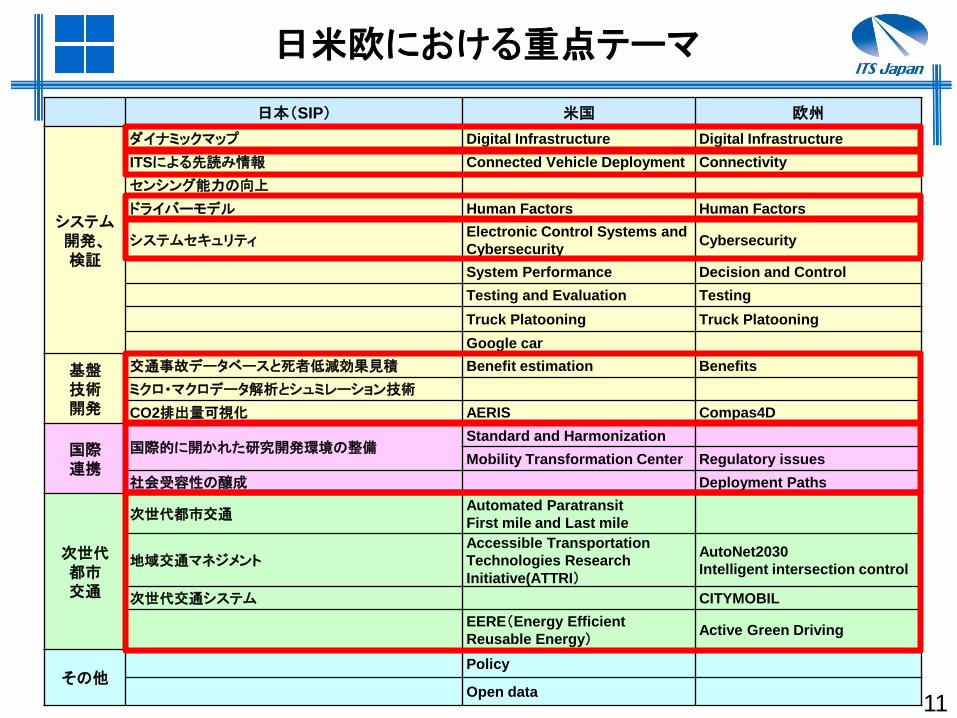
日米欧における重点テーマ
日本(SIP) 米国 欧州
システム
開発、
検証
ダイナミックマップ Digital Infrastructure Digital Infrastructure
ITSによる先読み情報 Connected Vehicle Deployment Connectivity
センシング能力の向上
ドライバーモデル Human Factors Human Factors
システムセキュリティ Electronic Control Systems and
Cybersecurity Cybersecurity
System Performance Decision and Control
Testing and Evaluation Testing
Truck Platooning Truck Platooning
Google car
基盤
技術
開発
交通事故データベースと死者低減効果見積 Benefit estimation Benefits
ミクロ・マクロデータ解析とシュミレーション技術
CO2排出量可視化 AERIS Compas4D
国際
連携
国際的に開かれた研究開発環境の整備 Standard and Harmonization
Mobility Transformation Center Regulatory issues
社会受容性の醸成 Deployment Paths
次世代
都市
交通
次世代都市交通 Automated Paratransit
First mile and Last mile
地域交通マネジメント
Accessible Transportation
Technologies Research
Initiative(ATTRI)
AutoNet2030
Intelligent intersection control
次世代交通システム CITYMOBIL
EERE(Energy Efficient
Reusable Energy) Active Green Driving
その他 Policy
Open data
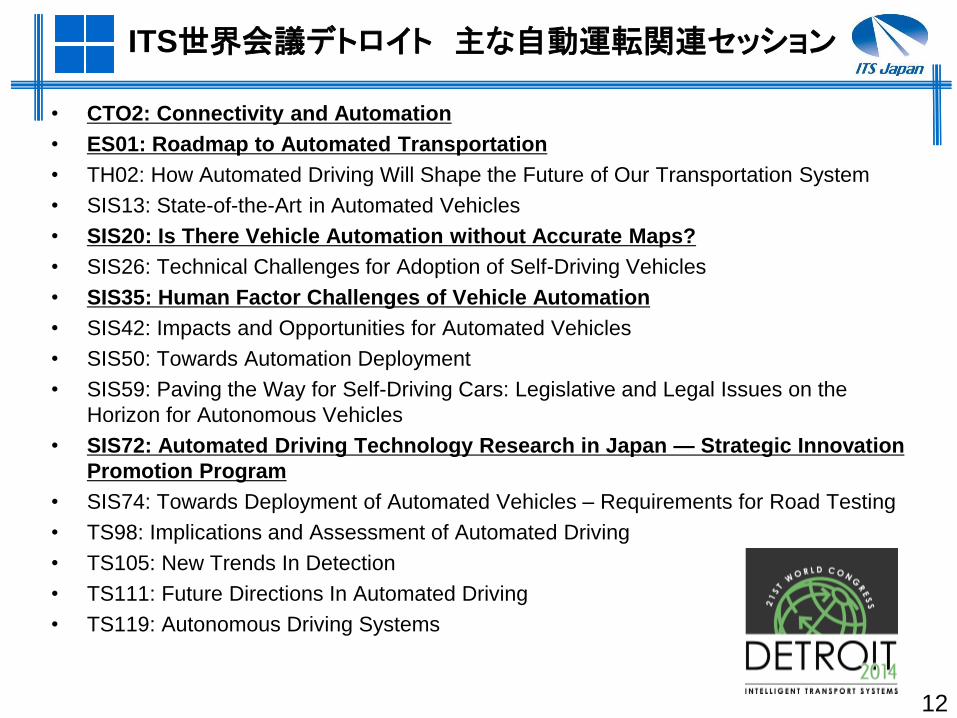
ITS世界会議デトロイト 主な自動運転関連セッション
• CTO2: Connectivity and Automation
• ES01: Roadmap to Automated Transportation
• TH02: How Automated Driving Will Shape the Future of Our Transportation System
• SIS13: State-of-the-Art in Automated Vehicles
• SIS20: Is There Vehicle Automation without Accurate Maps?
• SIS26: Technical Challenges for Adoption of Self-Driving Vehicles
• SIS35: Human Factor Challenges of Vehicle Automation
• SIS42: Impacts and Opportunities for Automated Vehicles
• SIS50: Towards Automation Deployment
• SIS59: Paving the Way for Self-Driving Cars: Legislative and Legal Issues on the
Horizon for Autonomous Vehicles
• SIS72: Automated Driving Technology Research in Japan — Strategic Innovation
Promotion Program
• SIS74: Towards Deployment of Automated Vehicles – Requirements for Road Testing
• TS98: Implications and Assessment of Automated Driving
• TS105: New Trends In Detection
• TS111: Future Directions In Automated Driving
• TS119: Autonomous Driving Systems
12

CTO2: Connectivity and Automation
Moderator
• Peter Sweatman (UMTRI, USA)
Speakers
• Jean-Francois Tarabbia (Valeo, France)
• Danny Shapiro (NVIDIA, USA)
• Kenneth Mihalyov (Xerox Services, USA)
• Hiroyuki Watanabe (Cabinet Office, Japan)
• Doug Patton (DENSO, USA)
13
日米欧の各企業や組織の各企業の技術トップから、協調システムや自動運転への取り組みについて紹介。
拡張HMI、車内ヴィジュアルコンピューティング、
モバイル決済、マルチモーダル都市交通、自動運転などの様々な分野において、インフラとの協調型システムがますます重要になってきている。
こうしたインフラ協調システムの実現に向けて、産官学の連携がさらに必要とされてきており、特に政府の役割の重要性が増している。

ES01: Roadmap to Automated Transportation
Moderator
• Masao Nagai (Japan Automobile Research Institute, Japan)
Speakers
• Dominique Doucet (Valeo, France)
• Malcolm Dougherty (California DOT, USA)
• Angelos Amditis (Institute of Communication and Computer Systems, Greece)
• Tagui Ichikawa (Cabinet Secretariat, Japan)
14
自動運転の実用化に向けた議論。
Valeoは、自動駐車など限定された状況から開始すべきとの意見。
カリフォルニア州運輸省は、DMV(Department of Motor Vehicles)が2015年1月1日までに公道における自動運転
車の試験と運用に関する規制を採択するとアナウンス。
内閣官房の市川参事官から、官民ITS構想・ロードマップおよびSIPの紹介。現在のロード
マップは完成版でなく、毎年見直していくとのこと。

SIS20: Is There Vehicle Automation without
Accurate Maps?
Moderator
• Maxime Flament (ERTICO-ITS Europe, Belgium)
Speakers
• Jun Shibata (Japan Digital Road Map Association, Japan)
• Carl Andersen (Federal Highway Administration, USA)
• Kirk Steudle (Michigan DOT, USA)
• Vladimir Zhukov (HERE, USA)
• Maxime Flament (ERTICO-ITS Europe, Belgium)
15
自動運転において、センシング補完、位置推定、経路判定のために高精度地図が必要という認識は一致。
共通課題は、メンテナンス、信頼性など。
日本デジタル道路地図協会(DRM)の柴田氏は、DRM作成の高度デジタル道路地図DBについて紹介。
地図データは道路管理者から入手し、地図作成とメンテナンスを行っている。
HEREは、高精細地図作成、動的データ取得、車両
挙動モデリング、クラウド地図データ配信などの総合的な取り組みを紹介。
海外からは、地図向けに交通規制等の情報を国が提供するという具体的事例はまだ出てきていない。

SIS35: Human Factor Challenges of Vehicle
Automation
Moderator
• Nick Reed (Transport Research Laboratory, UK)
Speakers
• Natasha Merat (University of Leeds, UK)
• Janet Creaser (University of Minnesota, USA)
• James Foley (Toyota Collaborative Safety Research Centre, USA)
• Toshitake Kawai (Honda, Japan)
• Erwin Boer (Steering Entropy Ltd., USA)
16
欧米におけるヒューマンファクタの話題として、以下が挙げられた。
ドライバーと車の権限移譲
システムの誤用
ドライバーのメンタルモデル
状況認識
自動化レベルとの関わり
日系車両メーカーからのプレゼンは、共にドライバーモデルに関するものであった。

SIS72: Automated Driving Technology Research in
Japan — Strategic Innovation Promotion Program
Moderator
• Hajime Amano (ITS Japan, Japan)
Speakers
• Hiroyuki Watanabe (Cabinet Office, Japan)
• Tomoyuki Tanuma (Cabinet Office, Japan)
• Masao Fukushima (Nissan Motor Co., Ltd., Japan)
• Kunio Segawa (Mazda Motor Corporation, Japan)
• Toshio Yokoyama (Honda R&D Co., Ltd., Japan)
• Seigo Kuzumaki (Toyota Motor Corporation, Japan)
• Masayuki Kawamoto (Toyota Motor Corporation, Japan)
• Mamoru Sekiguchi (Fuji Heavy Industries Ltd., Japan)
17
SIP自動走行システムで取り上げている以下の重要テーマへの取り組みを一通り紹介。
ダイナミックマップ
歩車間通信(V2P) HMI
事故低減効果シミュレーション
次世代都市交通システム
社会受容性
SIP自動走行システムの内容をまとめて一般に公開する初めての機会ということもあり、100名程度の参加者が集まる盛況なセッションとなった。

ショーケース(Atwater Parking Lot)
18
トヨタ ホンダ
自動走行車両(高速道路での自動走行デモを実施)

ショーケース(Belle Isle)
19
V2Vを用いた自動追従走行(デンソー) 自動バレーパーキング(Valeo)
自動走行電気自動車(GM) 地図データ収集車(HERE)

今後の自動運転に関する動き
20
ITS WC Detroit
TRB TRB WS#3
2014
ITS EU Helsinki
TRA Paris
道路交通分科会 戦略的イノベーション創造プログラム
Michigan Automated and Connected Vehicle WG
Connected Vehicle Public meeting
ITS世界会議デトロイト以降も、日米欧で議論継続
Workshop Tokyo
2015 2016
ITS WC Bordeaux
ITS WC Melbourne
Workshop Tokyo
Workshop Tokyo
TRB
Michigan Automated and Connected Vehicle WG
MTC Congress
ITS A
ITS AP
ITS A
TRB WS#4
TRB TRB WS#5
MTC Congress
WS
ITS EU
WS
自動運転中心

Workshop on Connected and Automated
Driving Systems
主催 総合科学技術・イノベーション会議
戦略的イノベーション創造プログラム(SIP) 自動走行システム推進委員会
会期 2014年11月17日(月)~18日(火)
会場 国連大学本部会議場(東京・青山)
セッションテーマ 1. 走行環境のモデル化(Dynamic Map) 2. 通信による走行環境情報の取得(Connected Vehicles) 3. 人と走行システムの関係(Human Factors) 4. 自動運転技術による交通事故の抑止(Impact Assessment) 5. 自動走行による都市交通の革新(Next Generation Transport)
21

Workshop on Connected and Automated
Driving Systems
プログラム案
22
Monday, November 17 Tuesday, November 18
Welcome Welcome
9:30-10:45
Opening Session
9:30-11:00
Human Factors
11:00-12:30
Dynamic Map
11:30-13:00
Impact Assessment
12:30-13:30
Lunch
13:00-14:30
Lunch
13:30-15:00
Connected Vehicles
14:30-17:00
Breakout Workshop
15:30-17:00
Next Generation Transport
17:30-18:30
Workshop Closing
17:30-19:00
Reception
19:00-21:00
Workshop Dinner

まとめ
ITS世界会議デトロイト2014における主な成果
• 自動運転実現のための重要課題に対する認識は日米欧で共通するものが多く、各課題について活発な議論が行われた。 日本としても今後、議論に積極的に参加し、SIP等において主導していく意思を明らかにした。
• 従来のサプライチェーンの枠組みを越えた異業種連携、土木・交通工学や人文・社会学を含んだ学際的連携、制度設計段階からの官民連携等の重要性を確認した。
• 新しい概念や制度の構築、新たな技術の標準化、社会受容性の醸成等、初期段階から国際連携を進める必要があるという共通認識が確立された。
23





























