Embed Size (px)
Citation preview

Mécanique - Chapitre 1 Prof. Carmen Bucur
1
1. INTRODUCTION
1.1 GENERALITES.
LES DIVISIONS DE LA MECANIQUE RATIONNELLE
Mécanique théorique faite partie des sciences naturelles. Elle s'appuie sur
des notions et des lois fondamentales, tirées de l'expérience reflétant une classe
déterminée de phénomènes naturels liés au mouvement des corps matériels. Les
notions et les lois fondamentales ne peuvent pas être réduites à d'autres notions
et lois plus simples.
Au sens général du terme, la Mécanique est la science qui
étudie le mouvement, l'équilibre et les interactions des corps
matériels.
On peut observer que le domaine d'étude de la Mécanique est très vaste. Car il
comprend l'étude des lois générales qui gouvernent les phénomènes mécaniques
et aussi des problèmes concrets, appliqués.
Un schéma de diverses branches de la Mécanique est présenté dans le tableau
1.1.
Tableau 1.1
Mécanique
quantique
Mécanique
théorique
Mécanique appliquée Mécanique
relativiste
- Statique
- Cinématique
- Dynamique
- Résistance des matériaux
- L’élasticité
- Statique et dynamique des
structures
- Mécanique des fluides
le corps
microscopique le corps macroscopique
le corps
indéformable le corps déformable
v « c v ≈ c
On les a départagées en suivant le critère de la dimension des corps (macro et
microscopique), le critère de la vitesse du mouvement (par comparaison à la
vitesse de propagation de la lumière dans le vide) et celui de l'hypothèse COPIAT
DE PE
SIT
E

Mécanique - Chapitre 1 Prof. Carmen Bucur
2
acceptée (la Mécanique théorique étudie les lois générales du mouvement des
corps matériels indéformables ; l'autre partie de la Mécanique, la Mécanique
appliquée abandonne cette hypothèse et comprend différentes disciplines
techniques, basées sur les lois et les méthodes de la Mécanique théorique).
Par des considérations méthodologiques, la Mécanique théorique est divisée en
trois parties :
* STATIQUE qui étudie les systèmes de forces, les systèmes de forces
équivalentes et les conditions d'équilibre des corps matériels soumis à l'action
des forces.
* CINEMATIQUE qui étudie les propriétés du mouvement des corps matériels
sans tenir compte de leur inertie (masse) et de forces qui agissent sur eux.
* DYNAMIQUE qui étudie les lois du mouvement des corps matériels soumis à
l'action des forces.
La Mécanique théorique considère les corps matériels comme indéformables ou
solides parfaits. Un corps sera nommé "solide parfait" ou "solide rigide" si la
distance entre deux quelconques de ses points reste constamment inchangée.
1.2 L'OBJET D'ETUDE DE LA MECANIQUE THEORIQUE
La Mécanique théorique est une science de la nature qui étudie le mouvement
mécanique des corps matériels.
Par "mouvement mécanique" on comprend toute variation
temporelle de la position d'un corps matériel macroscopique,
indéformable, dans l'espace, par rapport à un autre corps
considéré comme système de référence, avec des vitesses
négligeables par rapport à la vitesse de propagation de la
lumière, dans le vide.
Le système de référence de la Mécanique rationnelle s'appelle "système inertiel"
(parfois on l'appelle, conventionnellement "système immobile") ; par rapport à
ce système, les lois de la Mécanique sont vérifiées. D'après les données
d'expériences, dans le système solaire, le système inertiel est un système de
référence ayant pour l'origine le centre du Soleil et pour axes des demi-droites
orientées vers trois étoiles considérées immobiles. Pour résoudre la majorité des
problèmes techniques avec une précision suffisante pour la pratique, on peut
choisir comme système inertiel un système de référence lié rigidement à la
Terre.
COPIAT
DE PE
SIT
E
Mécanique - Chapitre 1 Prof. Carmen Bucur
3
1.3 MODELES DE LA MECANIQUE
Un phénomène physique complexe connaît beaucoup d'interactions entre un
phénomène principal (de base) et des phénomènes secondaires, entre divers
paramètres parmi lesquels se trouvent des paramètres ayant une influence
prédominante et aussi d'autres qui ont une influence pas significative. Prendre en
considération tous ces éléments c'est une opération très difficile, quelquefois
impossible, pas toujours nécessaire.
La première étape de chaque analyse comporte la séparation entre le phénomène
principal et les phénomènes secondaires et le choix des paramètres significatifs.
Par des hypothèses simplificatrices on néglige les éléments secondaires en
arrivant à un schéma abstrait qui s'appelle LE MODELE DE CALCUL.
Un modèle représente d'une manière approximative un processus réel et c'est
pour ça qu'on doit faire attention au domaine dans lequel est valable le schéma
abstrait considéré. Un modèle est bien choisi s'il est toujours validé par
l'expérience.
En ce qui va suivre, on va présenter quelques modèles de la Mécanique.
1.3.1 Modèles pour les systèmes matériels
On accepte trois modèles pour les systèmes matériels: le point matériel, le solide
parfait et les systèmes de points matériels ou de solides parfaits.
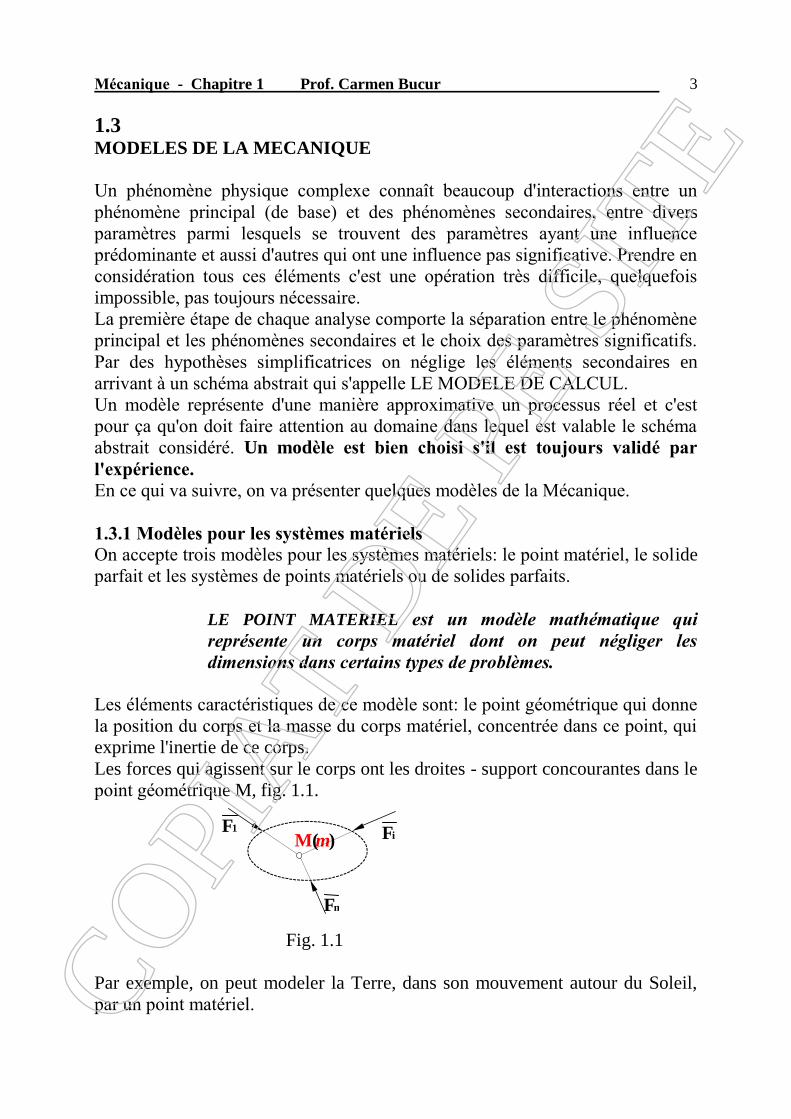
LE POINT MATERIEL est un modèle mathématique qui
représente un corps matériel dont on peut négliger les
dimensions dans certains types de problèmes.
Les éléments caractéristiques de ce modèle sont: le point géométrique qui donne
la position du corps et la masse du corps matériel, concentrée dans ce point, qui
exprime l'inertie de ce corps.
Les forces qui agissent sur le corps ont les droites - support concourantes dans le
point géométrique M, fig. 1.1.
Fig. 1.1
Par exemple, on peut modeler la Terre, dans son mouvement autour du Soleil,
par un point matériel.
F 1 M( m ) F i
F n
COPIAT
DE PE
SIT
E

Mécanique - Chapitre 1 Prof. Carmen Bucur
4
LE SOLIDE PARFAIT (ou solide rigide) est un corps qui
accepte le modèle du milieu continu et pour lequel la distance
entre deux points quelconques reste toujours constante,
indifféremment de la nature et la grandeur des forces qui
agissent, de l'état de repos ou de mouvement du corps matériel,
fig. 1.2.
Le solide est caractérisé par les dimensions, la masse et la position par rapport à
un système de référence.
Fig. 1.2
LE SYSTEME DE POINTS et/ou DE CORPS MATERIELS est un
ensemble de points et/ou de solides parfaits liés entre eux par de
liaisons.
Donc, la Mécanique théorique a comme hypothèse fondamentale celle de la
rigidité des corps matériels, c'est à dire qu'on considère que la distance entre
deux points du corps reste toujours constante. Cette hypothèse est abandonnée
par la Mécanique appliquée qui considère les corps matériels déformable.
1.3.2 Classification des corps par rapport à leurs dimensions
1.3.2.1 Le corps unidimensionnel
Est un solide parfait qui a une dimension prédominante par
rapport aux autres. Il s'appelle BARRE ou FIL.
La barre est un corps qui garde sa forme sous des sollicitations de traction ou de
compression. Une barre est caractérisée par son axe et par la loi de variation de
la section transversale. L'axe de la barre, normale à la section transversale,
représente le lieu géométrique des centres de gravité de ces sections.
Les barres, fig. 1.3 ont comme axes des droites ou des courbes.
Dans le domaine du Génie Civil, la barre droite représente le modèle accepté
pour les poutres et les poteaux des structures à portiques et les barres courbes, le
modèle pour les arcs utilisés à des constructions connues: ponts, hangars, halles
industrielles.
A
d =ct.
B
(C) M
COPIAT
DE PE
SIT
E

Mécanique - Chapitre 1 Prof. Carmen Bucur
5
Fig. 1.3
Le fil est aussi un corps unidimensionnel mais qui garde sa forme d'équilibre
seulement s'il est soumis à la traction. Les câbles, fig. 1.4
sont utilisés pour la réalisation des téléphériques, des ponts
suspendus à grande portée, des toits suspendus, le transfère
de l’énergie électrique.
Fig. 1.4
Exemples :
Pont Vihantasalmi - Finlande
A
la section
transversale
fibre
moyenne C
ossature
poutre
poteaux
arc
fil
COPIAT
DE PE
SIT
E

Mécanique - Chapitre 1 Prof. Carmen Bucur
6
Pont Ruck-a-Chucky
1.3.2.2 Le corps bidimensionnel
Est le solide parfait qui a deux dimensions prédominantes par
rapport à la troisième.
Le corps bidimensionnel est caractérisé par l’épaisseur (h) et par le plan moyen.
Il s'appelle PLAQUE ou DALLE si les forces extérieures ont les directions
perpendiculaires sur le plan moyen. Il y a aussi la situation quand les forces
extérieures ont les directions parallèles au plan moyen, fig. 1.5.
Les plaques peuvent être planes ou courbes. Les
planchers d'une structure multi étagée sont
modelés par des plaques planes. Les plaques
courbes, surtout si elles sont très minces
s'appellent COQUES et sont utilisées comme
toits pour des structures à grande portée:
pavillons d'expositions, salles de sport, etc.
Fig. 1.5
plan
moyen
plaque
P
p
P P P
h
COPIAT
DE PE
SIT
E

Mécanique - Chapitre 1 Prof. Carmen Bucur
7
Exemple :
Tour Cooling - Germania
1.3.2.3 Le corps tridimensionnel
Est le solide parfait qui a trois dimensions comparables.
Il s'appelle BLOC, fig. 1.6. Un élément de
construction qui peut être modelé par un bloc est
la fondation sous les murs ou les piliers
(poteaux).
Fig. 1.6
Exemple:
fondation
pilier
COPIAT
DE PE
SIT
E

Mécanique - Chapitre 1 Prof. Carmen Bucur
8
1.4 LES NOTIONS FONDAMENTALES DE LA
MECANIQUE THEORIQUE
Les notions fondamentales de la Mécanique théorique sont: l'espace, le temps et
la masse.
* L 'ESPACE : est le lieu ou ce déroulent les phénomènes. L'espace est
considéré infini, continu, homogène et isotrope. La Mécanique accepte le
modèle de l'espace euclidien avec trois dimensions.
* LE TEMPS: il caractérise la durée des phénomènes. Il est unidimensionnel en
ayant un seule sens. Le temps est considéré infini, continu, homogène, uniforme.
* LA MASSE: est une mesure de l'inertie des corps matériels en mouvement de
translation. En même temps, la masse mesure la quantité de substance contenue
dans de corps donné. La masse est une grandeur scalaire, positive. La
Mécanique théorique considère que la masse d'un corps reste constante par
rapport au temps.
En étroite liaison avec la notion de masse se trouve la notion de FORCE,
considérée par la Mécanique théorique comme une notion dérivée.
Les unités de mesure des grandeurs qui expriment les notions fondamentales de
la Mécanique théorique - l'espace, le temps et la masse - sont: le mètre [m], la
seconde [s] et le kilogramme [kg].
1.5 LA NOTION DE FORCE. CLASSIFICATION DES FORCES
En mécanique on appelle FORCE la grandeur vectorielle qui
mesure quantitativement l'action mécanique réciproque des
corps matériels.
L'effet mécanique d'une force se traduit par une modification de l'état (de repos
ou de mouvement) du corps. L'unité de mesure pour la force est le Newton [N].
Il y a seulement deux forces fondamentales :
- la force d'attraction universelle 2
21
d
mmfF
- la force électrique 2
21
d
qqkF
Toutes les autres forces ont des expressions simplifiées par exemple:
- la force de gravité gmF
- la force d'élasticité rkF
La Mécanique théorique utilise des modèles de calcul qui donnent la possibilité
de classifier les forces d'après divers critères comme: la modalité d'application,
la nature des forces, la variation ou la constance du vecteur force, etc. COPIAT
DE PE
SIT
E
Mécanique - Chapitre 1 Prof. Carmen Bucur
9
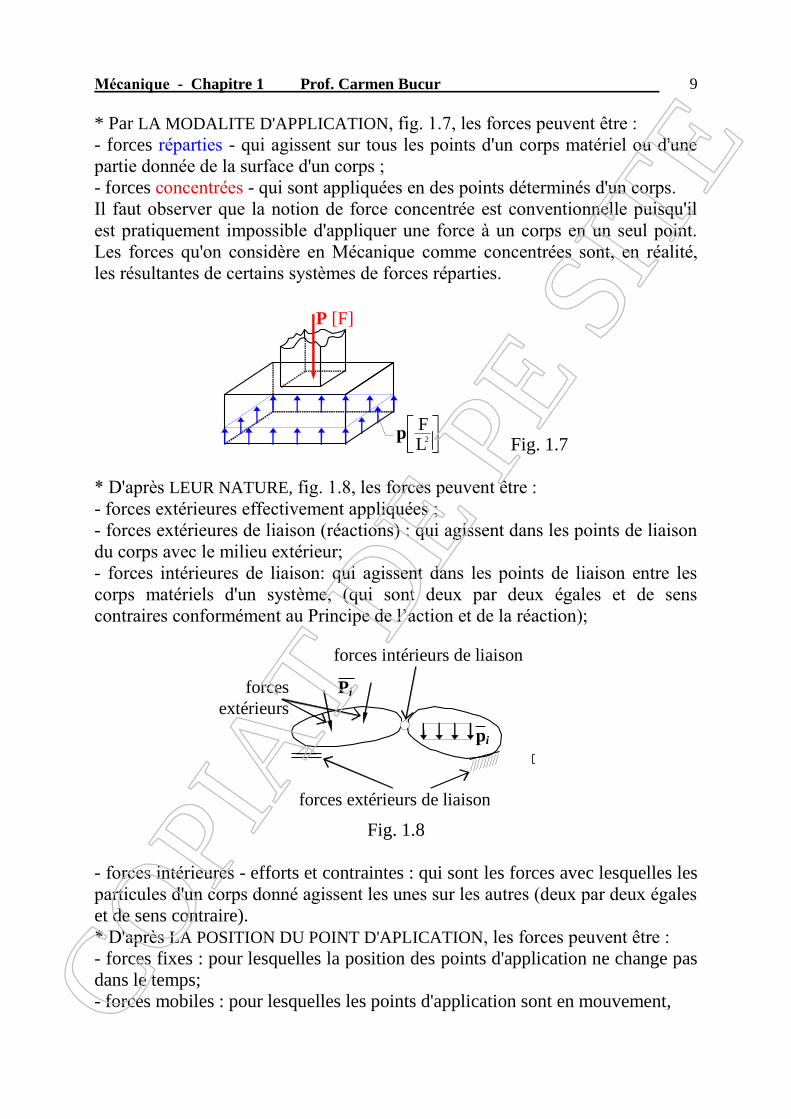
* Par LA MODALITE D'APPLICATION, fig. 1.7, les forces peuvent être :
- forces réparties - qui agissent sur tous les points d'un corps matériel ou d'une
partie donnée de la surface d'un corps ;
- forces concentrées - qui sont appliquées en des points déterminés d'un corps.
Il faut observer que la notion de force concentrée est conventionnelle puisqu'il
est pratiquement impossible d'appliquer une force à un corps en un seul point.
Les forces qu'on considère en Mécanique comme concentrées sont, en réalité,
les résultantes de certains systèmes de forces réparties.
Fig. 1.7
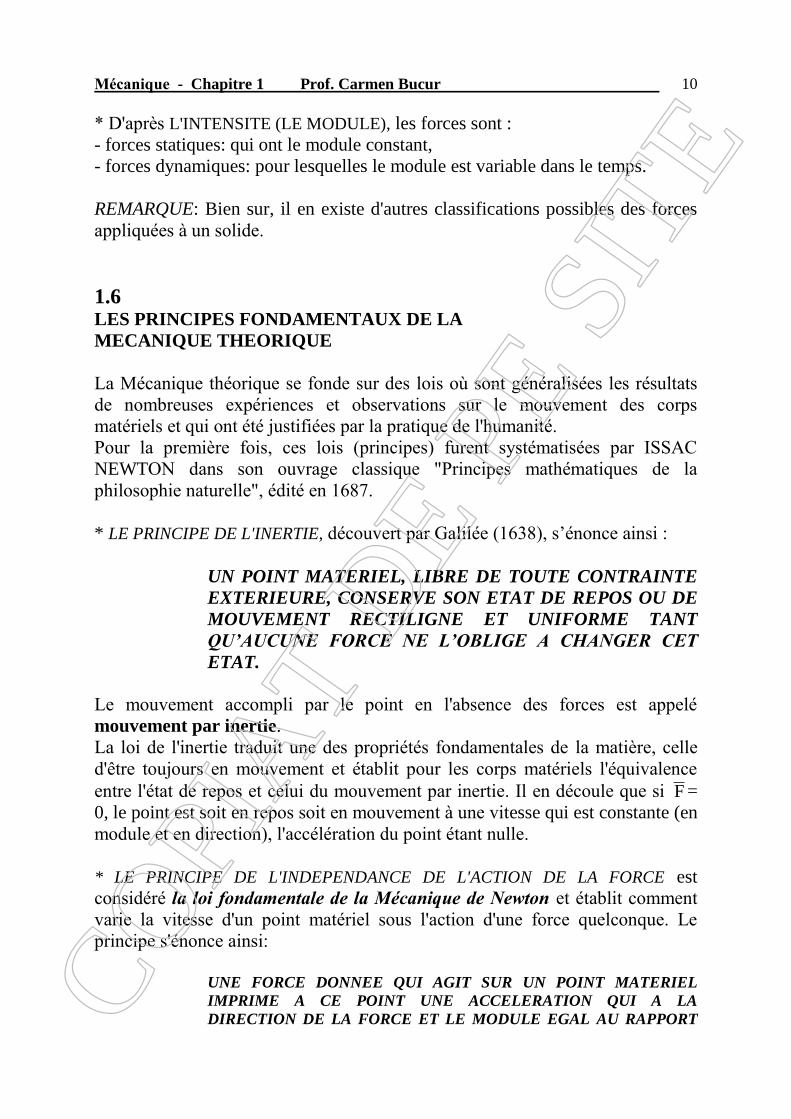
* D'après LEUR NATURE, fig. 1.8, les forces peuvent être :
- forces extérieures effectivement appliquées ;
- forces extérieures de liaison (réactions) : qui agissent dans les points de liaison
du corps avec le milieu extérieur;
- forces intérieures de liaison: qui agissent dans les points de liaison entre les
corps matériels d'un système, (qui sont deux par deux égales et de sens
contraires conformément au Principe de l’action et de la réaction);
Fig. 1.8
- forces intérieures - efforts et contraintes : qui sont les forces avec lesquelles les
particules d'un corps donné agissent les unes sur les autres (deux par deux égales
et de sens contraire).
* D'après LA POSITION DU POINT D'APLICATION, les forces peuvent être :
- forces fixes : pour lesquelles la position des points d'application ne change pas
dans le temps;
- forces mobiles : pour lesquelles les points d'application sont en mouvement,
pFL2
P [F]
pi
Pi
forces extérieurs de liaison
forces intérieurs de liaison
forces
extérieurs
COPIAT
DE PE
SIT
E
Mécanique - Chapitre 1 Prof. Carmen Bucur
10
* D'après L'INTENSITE (LE MODULE), les forces sont :
- forces statiques: qui ont le module constant,
- forces dynamiques: pour lesquelles le module est variable dans le temps.
REMARQUE: Bien sur, il en existe d'autres classifications possibles des forces
appliquées à un solide.
1.6 LES PRINCIPES FONDAMENTAUX DE LA
MECANIQUE THEORIQUE
La Mécanique théorique se fonde sur des lois où sont généralisées les résultats
de nombreuses expériences et observations sur le mouvement des corps
matériels et qui ont été justifiées par la pratique de l'humanité.
Pour la première fois, ces lois (principes) furent systématisées par ISSAC
NEWTON dans son ouvrage classique "Principes mathématiques de la
philosophie naturelle", édité en 1687.
* LE PRINCIPE DE L'INERTIE, découvert par Galilée (1638), s’énonce ainsi :
UN POINT MATERIEL, LIBRE DE TOUTE CONTRAINTE
EXTERIEURE, CONSERVE SON ETAT DE REPOS OU DE
MOUVEMENT RECTILIGNE ET UNIFORME TANT
QU’AUCUNE FORCE NE L’OBLIGE A CHANGER CET
ETAT.
Le mouvement accompli par le point en l'absence des forces est appelé
mouvement par inertie.
La loi de l'inertie traduit une des propriétés fondamentales de la matière, celle
d'être toujours en mouvement et établit pour les corps matériels l'équivalence
entre l'état de repos et celui du mouvement par inertie. Il en découle que si F =
0, le point est soit en repos soit en mouvement à une vitesse qui est constante (en
module et en direction), l'accélération du point étant nulle.
* LE PRINCIPE DE L'INDEPENDANCE DE L'ACTION DE LA FORCE est
considéré la loi fondamentale de la Mécanique de Newton et établit comment
varie la vitesse d'un point matériel sous l'action d'une force quelconque. Le
principe s'énonce ainsi:
UNE FORCE DONNEE QUI AGIT SUR UN POINT MATERIEL
IMPRIME A CE POINT UNE ACCELERATION QUI A LA
DIRECTION DE LA FORCE ET LE MODULE EGAL AU RAPPORT COPIAT
DE PE
SIT
E

Mécanique - Chapitre 1 Prof. Carmen Bucur
11
ENTRE LE MODULE DE LA FORCE ET LA MASSE DU POINT
MATERIEL, fig. 1.9.
L’expression mathématique de cette loi est fournie par l'égalité vectorielle
amF
Fig. 1.9
La deuxième loi de la Mécanique théorique, ainsi que la première d'ailleurs, se
rapporte uniquement à un système inertiel (le système de Galilée). Il découle
immédiatement de cette loi que la mesure de l'inertie d'un point matériel est
représentée par sa masse car, sous l'action d'une même force, deux points
matériels différents ne reçoivent pas une même accélération que dans le cas de
masses égales; si les masses sont différentes, le point de masse plus grande
(c'est-à-dire de plus grande inertie) acquiert une accélération plus petite et
inversement.
L'énoncé du deuxième principe contient, d'une manière implicite, la propriété de
l'indépendance de l'action d'une force par rapport aux actions d'autres forces. Si
le point est soumis à l'action simultanée des plusieurs forces, chaque force
imprime une accélération d'après sa direction, proportionnelle avec cette force et
le mouvement du point va avoir la direction de la résultante des forces. La
résultante est la force qui remplace l'effet mécanique de l'action du système de
forces.
On dit que LA RESULTANTE EST EQUIVALENTE AVEC LE SYSTEME
DONNE DE FORCES CONCOURANTES.
Newton a énoncé l'axiome du parallélogramme des forces, comme règle pour
obtenir la résultante d'un système de forces :
DEUX FORCES APPLIQUEES A UN CORPS EN UN MEME
POINT ONT UNE RESULTANTE APPLIQUEE EN CE
MEME POINT REPRESENTEE PAR LA DIAGONALE DU
PARALLELOGRAMME AYANT CES FORCES COMME
COTES
Par conséquent, l'axiome du parallélogramme
des forces montre que la résultante représente la
somme géométrique (vectorielle) de ces forces,
fig. 1.10.
21 FFR
Fig. 1.10
F1
a
M(m)
F1
R
F2
COPIAT
DE PE
SIT
E

Mécanique - Chapitre 1 Prof. Carmen Bucur
12
Cet axiome a deux conséquences:
- montre la nature vectorielle des forces;
- donne la possibilité d'appliquer l'hypothèse de la superposition des effets.
* LE PRINCIPE DE L'ACTION ET DE LA REACTION établit le caractère de
l'interaction mécanique entre les corps matériels et s'énonce ainsi :
LORSQU'UN CORPS MATERIEL EXERCE UNE ACTION
QUELCONQUE SUR UN AUTRE CORPS, IL SE PRODUIT
UNE REACTION DE MEME INTENSITE MAIS DE SENS
INVERS, fig.1.11.
Fig. 1.11
REMARQUE : Les forces de l'interaction entre les points ou corps matériels ne
constituent pas un système de forces en équilibre, puisque ces forces sont
appliquées en des points différents.
A
R
COPIAT
DE PE
SIT
E