Embed Size (px)
Citation preview

Bloch equations �
Ravinder Reddy�
Outline��• Magnetic moment and Larmor precession �• Bloch equations�
– With and without relaxation �– With RF and Relaxation �– Transformation into rotating frame�– Steady state solutions�
• Absorption and dispersion �– Steady state solutions�– Pulse responses�
• Advantages and Limitations of BE �– Single pulse and spin-echo sequence�
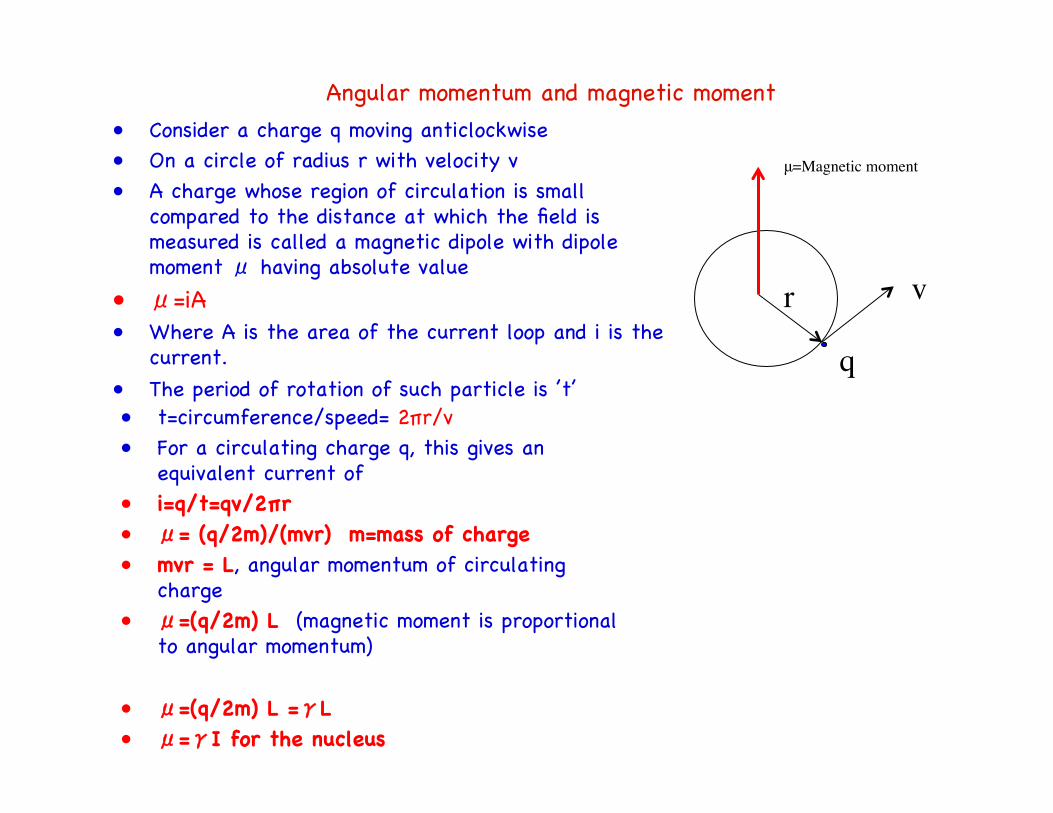
Angular momentum and magnetic moment �• Consider a charge q moving anticlockwise�• On a circle of radius r with velocity v �• A charge whose region of circulation is small
compared to the distance at which the field is measured is called a magnetic dipole with dipole moment μ having absolute value�
• μ=iA �• Where A is the area of the current loop and i is the
current. �• The period of rotation of such particle is ’t’�
�
μ=Magnetic moment
v r
q • t=circumference/speed= 2πr/v �• For a circulating charge q, this gives an
equivalent current of�• i=q/t=qv/2πr�• μ= (q/2m)/(mvr) m=mass of charge �• mvr = L, angular momentum of circulating
charge�• μ=(q/2m) L (magnetic moment is proportional
to angular momentum)�
• μ=(q/2m) L =γL �• μ=γI for the nucleus�
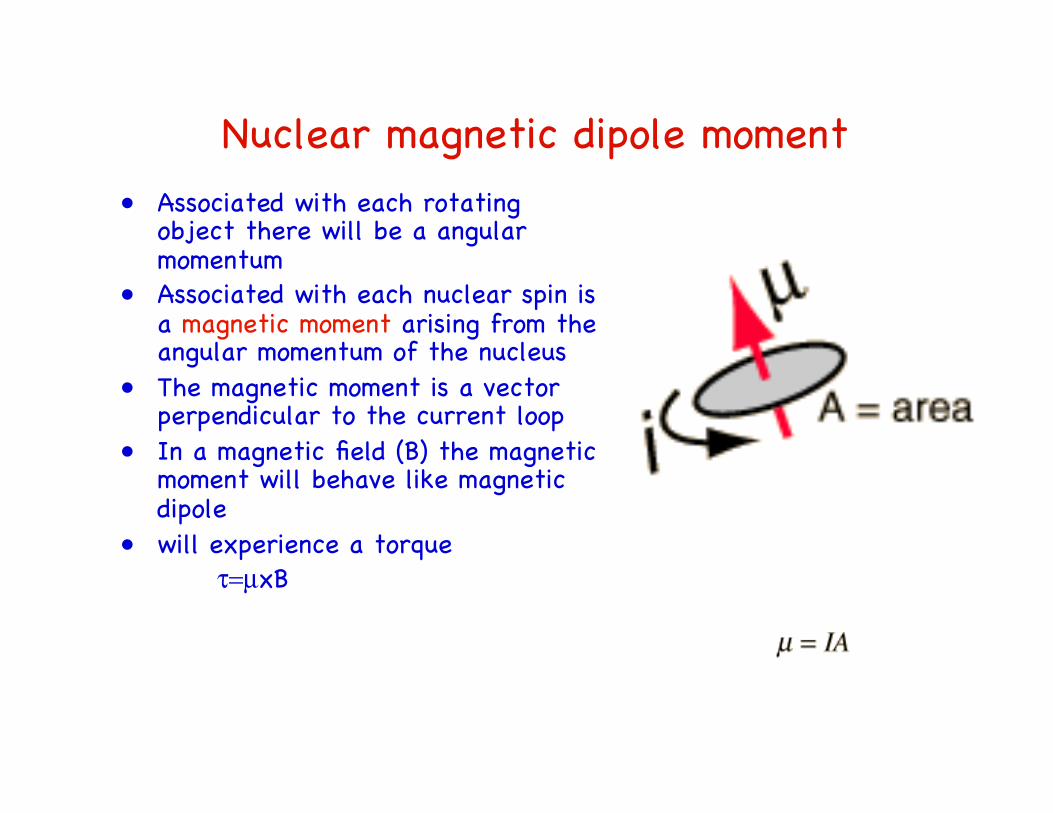
Nuclear magnetic dipole moment �• Associated with each rotating
object there will be a angular momentum�
• Associated with each nuclear spin is a magnetic moment arising from the angular momentum of the nucleus�
• The magnetic moment is a vector perpendicular to the current loop �
• In a magnetic field (B) the magnetic moment will behave like magnetic dipole�
• will experience a torque� τ=µxB �
Larmor Precession �
�
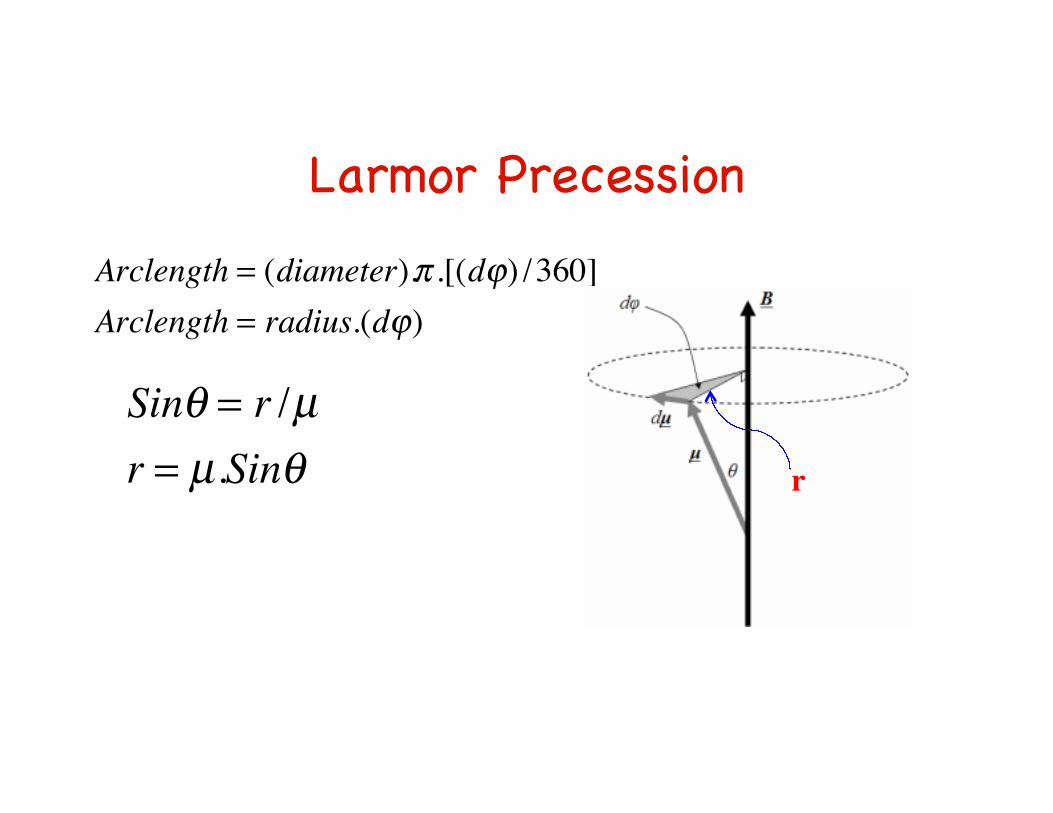
Arclength = (diameter).π .[(dϕ) /360]Arclength = radius.(dϕ)
�
Sinθ = r /µr = µ.Sinθ r
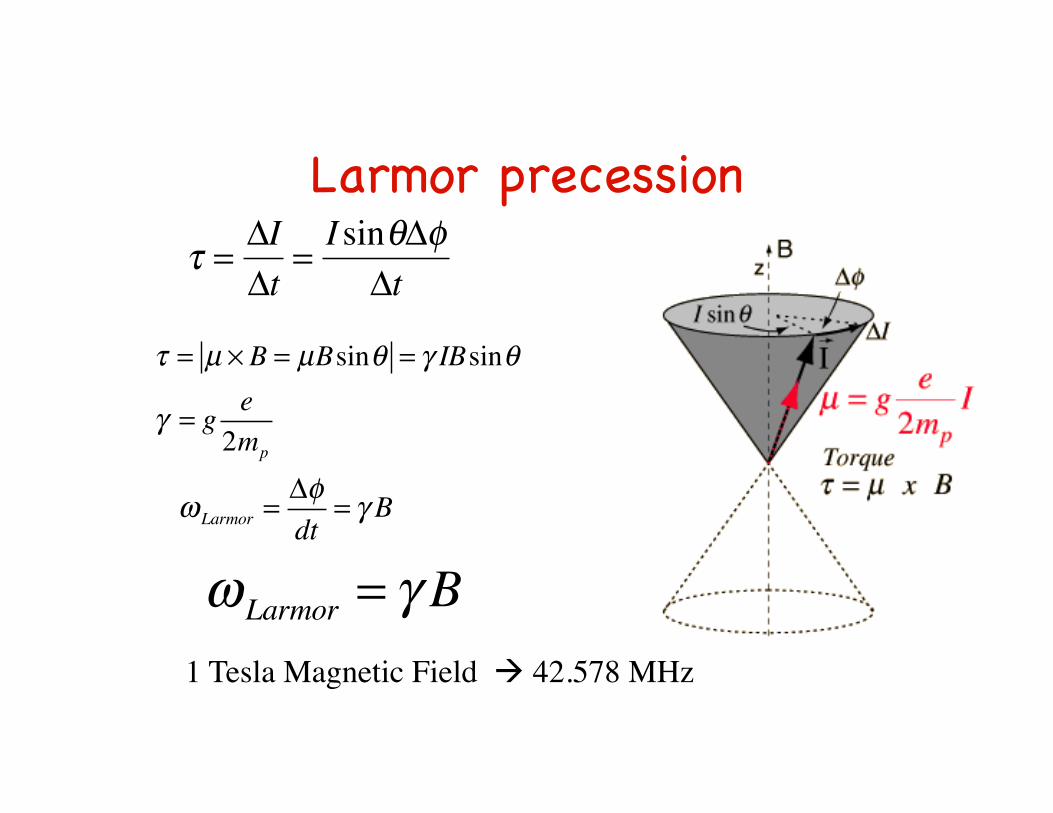
Larmor precession �
�
τ =ΔIΔt
=I sinθΔφ
Δt
1 Tesla Magnetic Field à 42.578 MHz
ω Larmor = γ B
τ = µ × B = µBsinθ = γ IBsinθ
γ = g e2mp
ω Larmor =Δφdt
= γ B
Larmor Precession �
• Precession of the magnetization vector around the z-axis of the magnetic field �

Boltzman factor�
• Boltzman factor�• b=(N+-N-)/N=ΔE/2kT �• K=1.3805x10-23 J/Kelvin �
• T=300 k �• ΔE= hν=6.626x10-34 Js x100 MHz �• b= 7.99 x10-6�
• How is the Boltzman factor changes with Bo and or T?�

Bloch equations�
• In terms of total angular momentum of a sample�
�
dΜdt
= γΜxB
�
M= µi
i
∑
• Total magnetic moment of a sample�
• Interaction of magnetic moment with magnetic field gives a torque on the system and changes the angular momentum of the system�
�
M = γL
�
τ =dL
dt= M × B
�
dMdt
= γdLdt
= γM × B
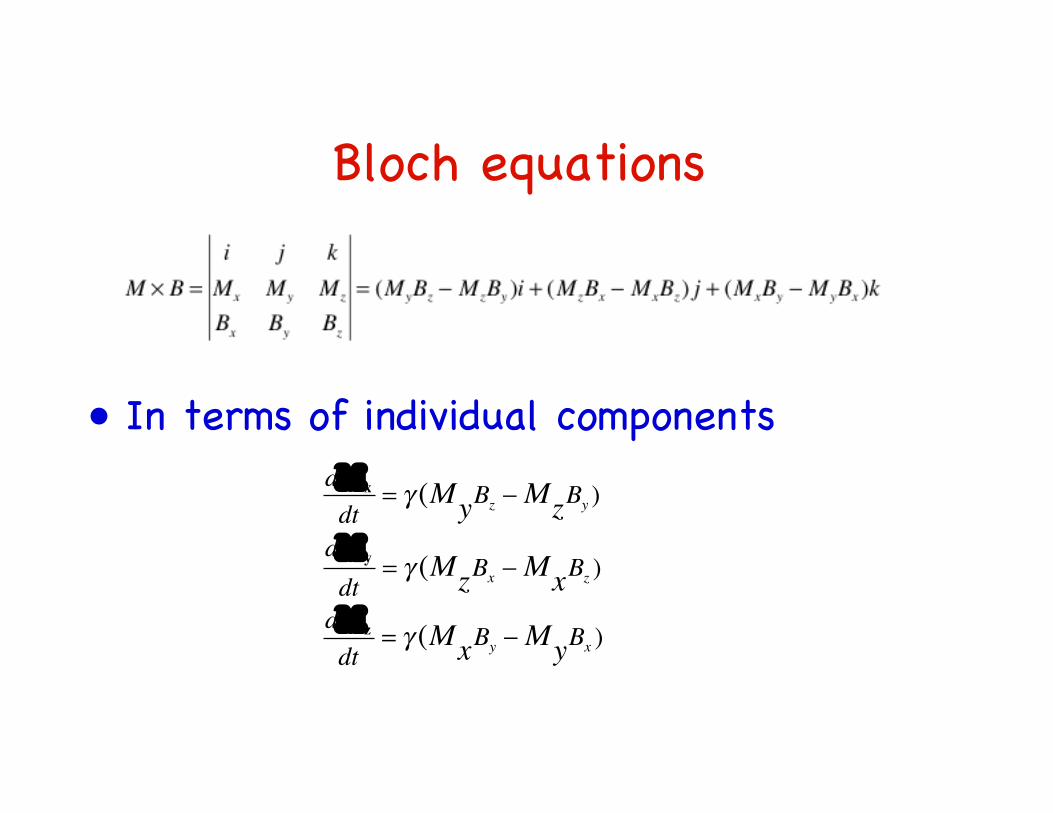
Bloch equations�
• In terms of individual components�dΜx
dt= γ (MyBz −MzBy )
dΜy
dt= γ (MzBx −MxBz )
dΜz
dt= γ (MxBy −MyBx )
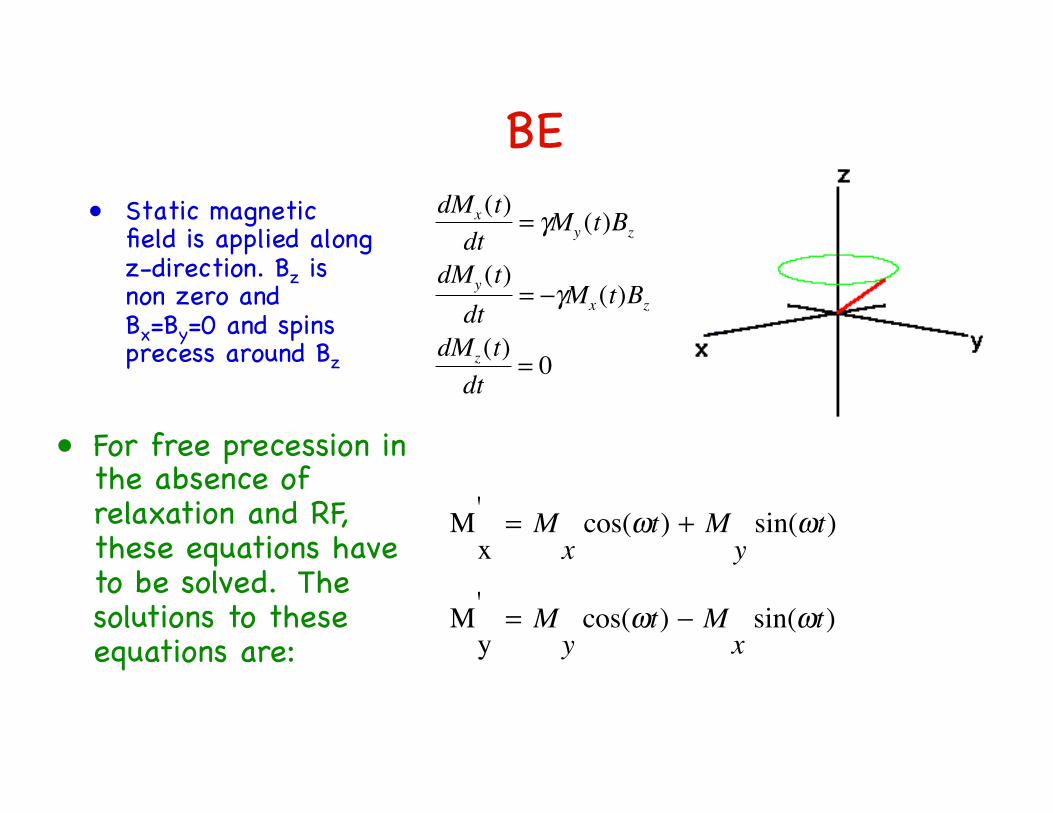
BE�• Static magnetic
field is applied along z-direction. Bz is non zero and Bx=By=0 and spins precess around Bz�
• For free precession in the absence of relaxation and RF, these equations have to be solved. The solutions to these equations are: �
�
Mx
'= M
xcos(ωt) + M
ysin(ωt)
My
'= M
ycos(ωt) − M
xsin(ωt)
�
dMx (t)dt
= γMy (t)Bz
dMy (t)dt
= −γMx (t)Bz
dMz(t)dt
= 0

Including relaxation �• Spin-lattice and spin-
spin relaxation can be treated as first order processes with characteristic times T1 and T2 respectively. �
�
dMx
dt= γ (M
yBz−M
zBy) −Mx
T2
dM y
dt= γ (M
zBx−M
xBz) −
My
T2
dMz
dt= γ (M
xBy −My
Bx ) − −(M
z−M
o)
T1
• Including relaxation terms alone and treating that the Bo applied along z-axis (Bx=By=0, Bo=Bz)) the Bloch equations are given by: �
�
�
dMx
dt= γM
yBo−Mx
T2
dMy
dt= −γM
xBo−
My
T2
dMz
dt= −(M
z−M
o)
T1
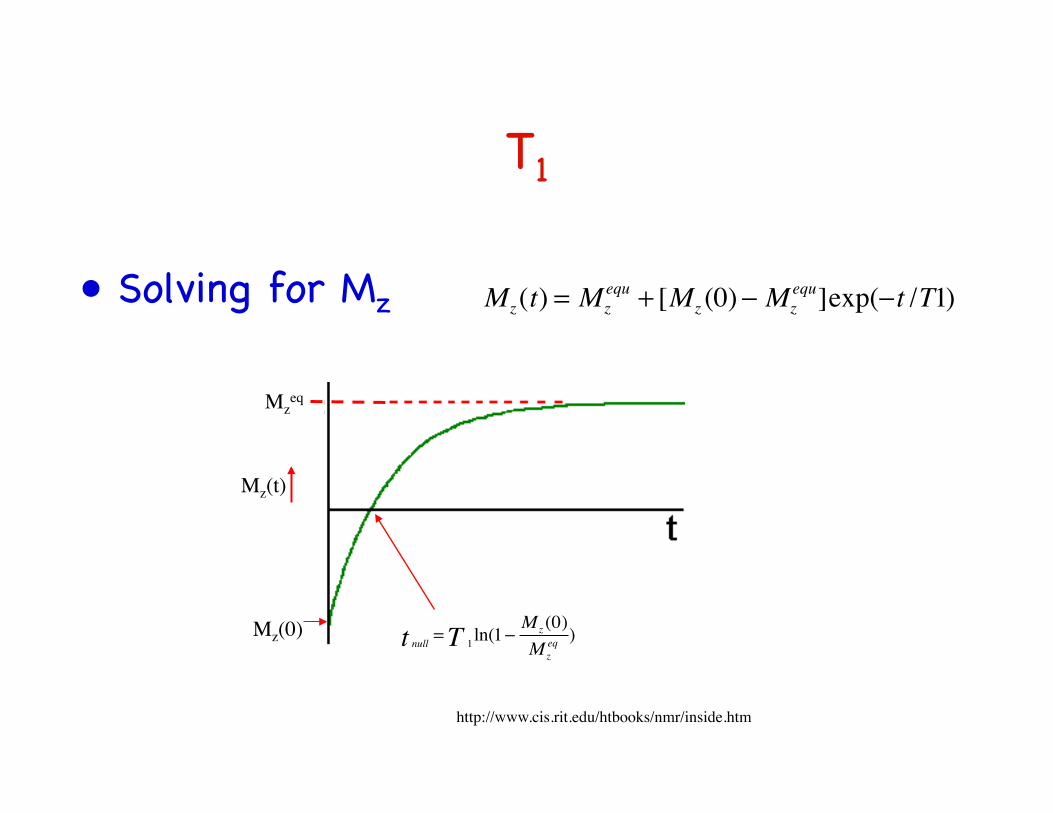
T1 �
• Solving for Mz�
�
Mz(t) = Mz
equ+ [Mz (0)− Mz
equ]exp(−t /T1)
Mz(t)
Mz(0) nullt = 1T ln(1−
Mz (0)Mz
eq )
Mzeq
http://www.cis.rit.edu/htbooks/nmr/inside.htm
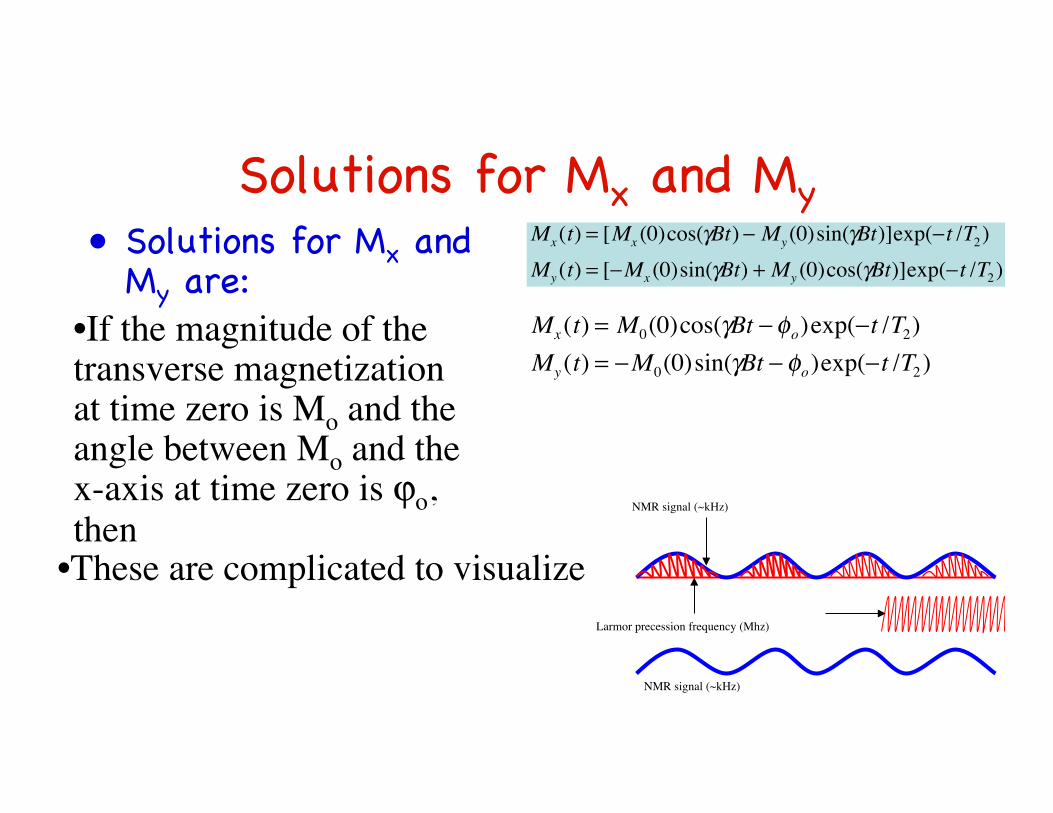
Solutions for Mx and My�• Solutions for Mx and
My are: �
�
Mx(t) = [M
x(0)cos(γBt) − M
y(0)sin(γBt)]exp(−t /T2)
My (t) = [−Mx (0)sin(γBt) + My (0)cos(γBt)]exp(−t /T2)
�
Mx (t) = M0(0)cos(γBt −φo)exp(−t /T2)
My (t) = −M0(0)sin(γBt − φo)exp(−t /T2)
• These are complicated to visualize
• If the magnitude of the transverse magnetization at time zero is Mo and the angle between Mo and the x-axis at time zero is ϕo, then
NMR signal (~kHz)
Larmor precession frequency (Mhz)
NMR signal (~kHz)
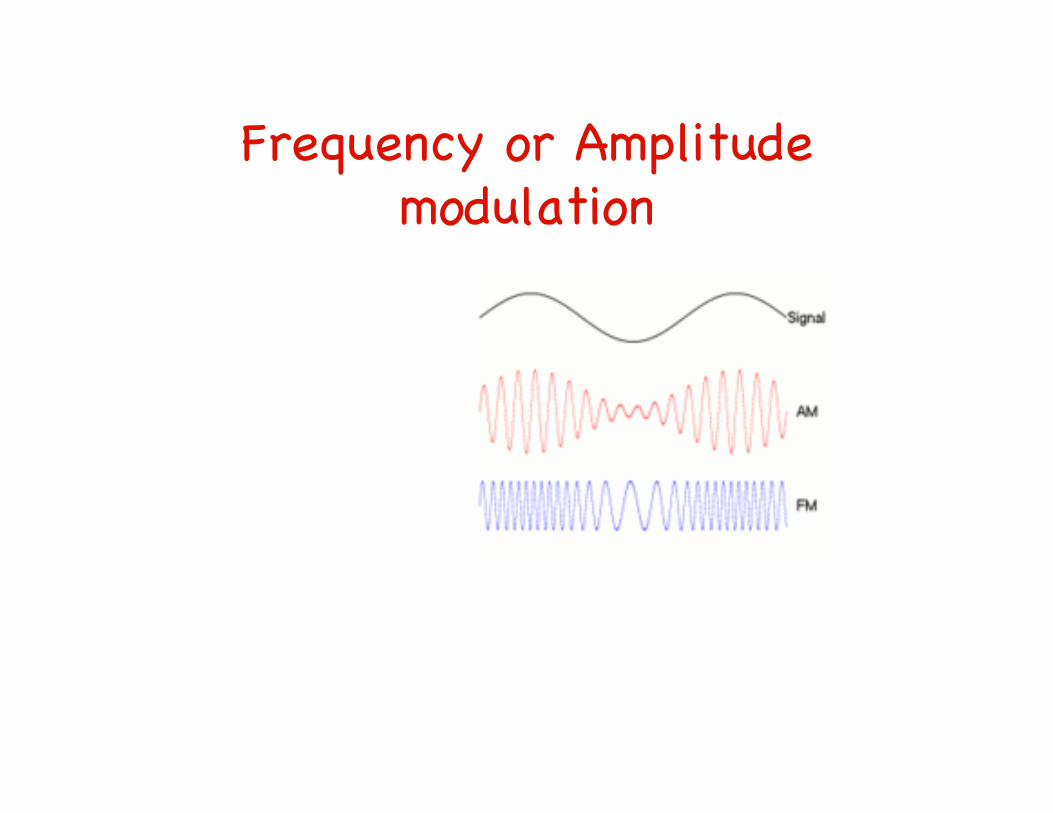
Frequency or Amplitude modulation �
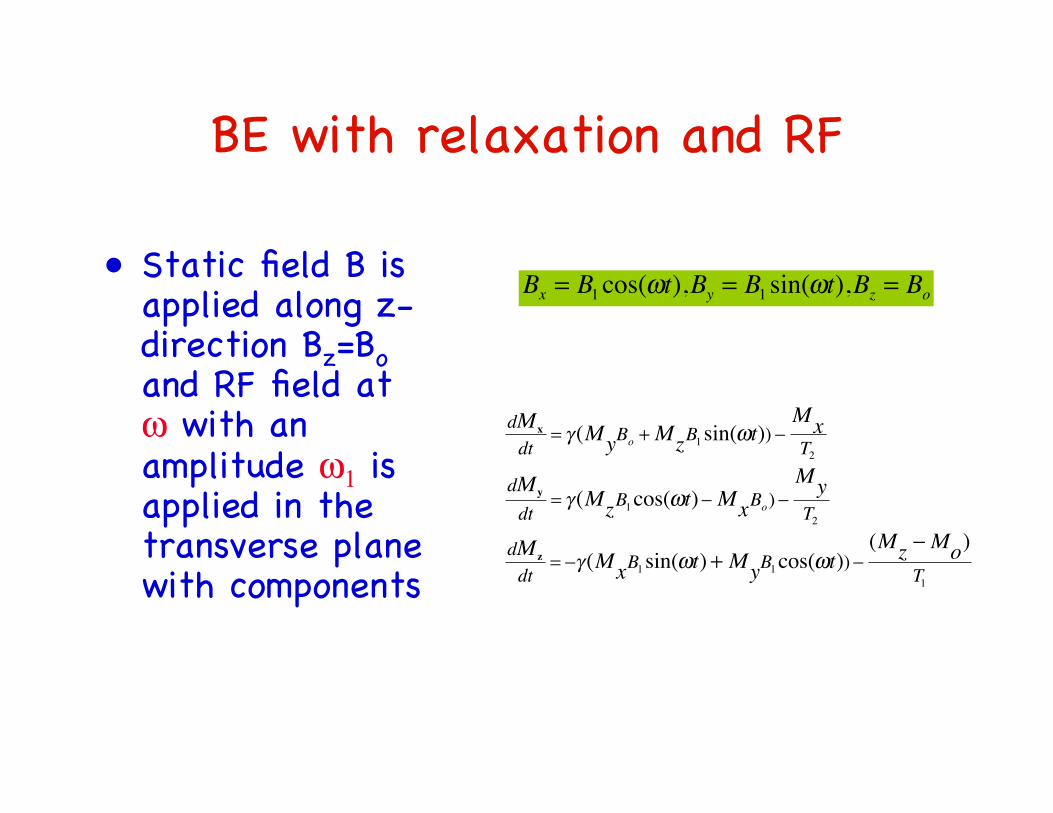
BE with relaxation and RF�
• Static field B is applied along z-direction Bz=Bo and RF field at ω with an amplitude ω1 is applied in the transverse plane with components�
�
Bx = B1 cos(ωt),By = B1 sin(ωt),Bz = Bo
�
dMx
dt= γ (M
yBo
+ MzB1sin(ωt)) −
Mx
T2
dM y
dt= γ (M
zB1cos(ωt)−M
xBo) −
My
T2
dMz
dt= −γ (M
xB1 sin(ωt)+ M
yB1 cos(ωt))−
(Mz−M
o)
T1
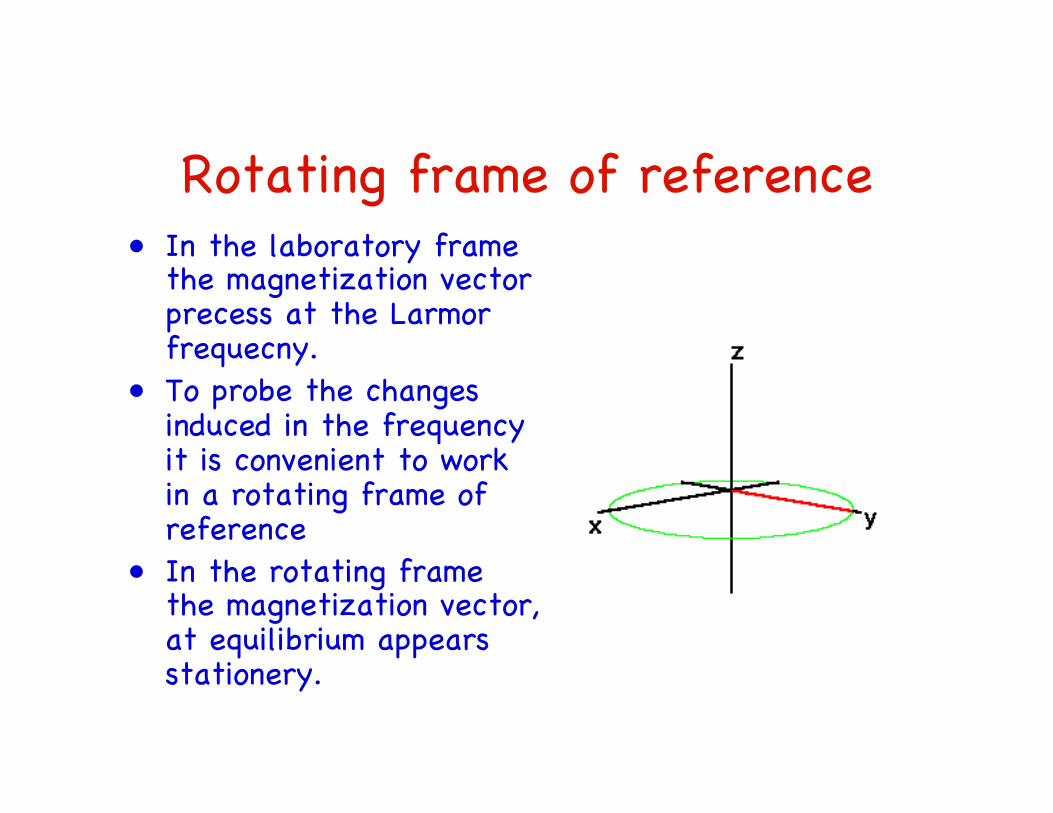
Rotating frame of reference�• In the laboratory frame
the magnetization vector precess at the Larmor frequecny.�
• To probe the changes induced in the frequency it is convenient to work in a rotating frame of reference�
• In the rotating frame the magnetization vector, at equilibrium appears stationery.�

Magnetization vector�• Bo is along z-axis �• Equilibrium
magnetization Mo is along z-axis�
• Mx and My = 0�
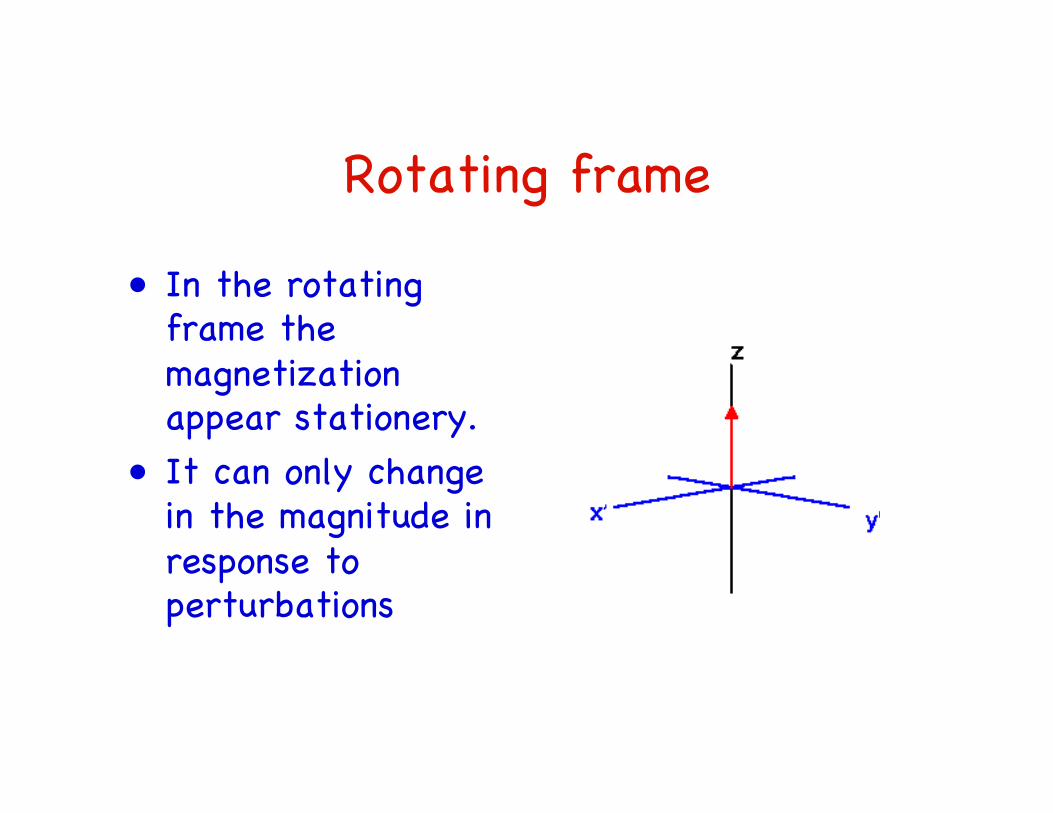
Rotating frame �
• In the rotating frame the magnetization appear stationery.�
• It can only change in the magnitude in response to perturbations�
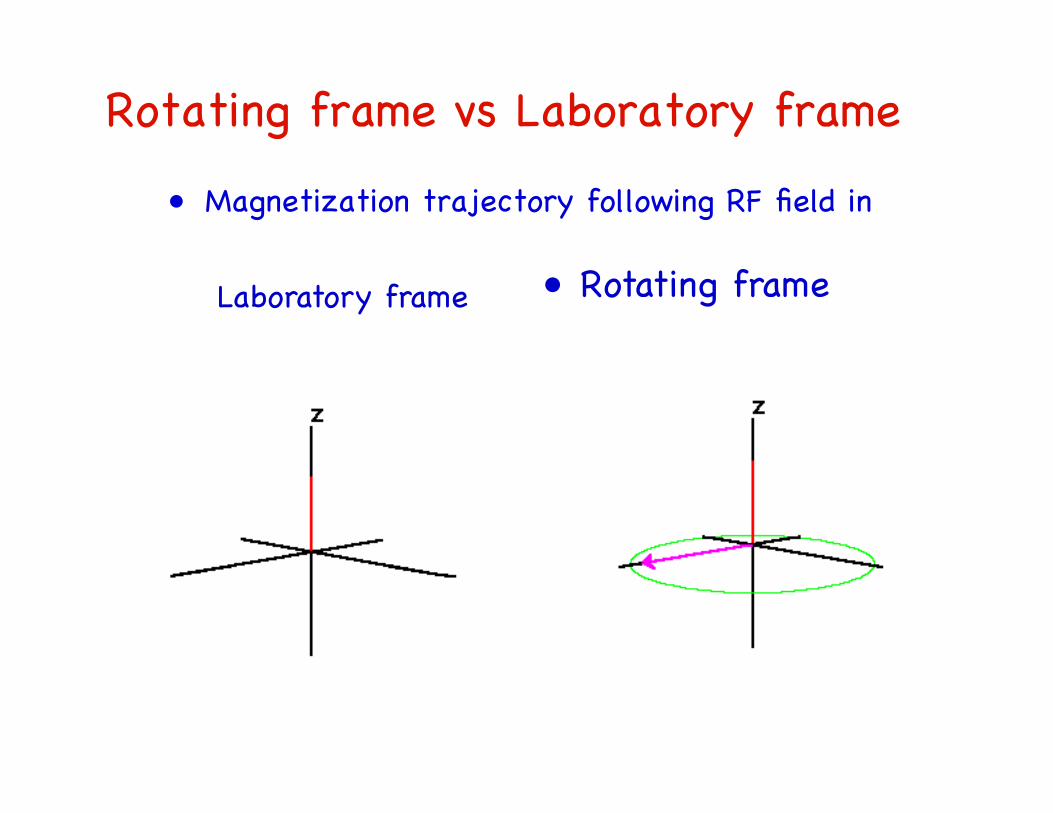
Rotating frame vs Laboratory frame�• Magnetization trajectory following RF field in �
• Rotating frame�Laboratory frame�
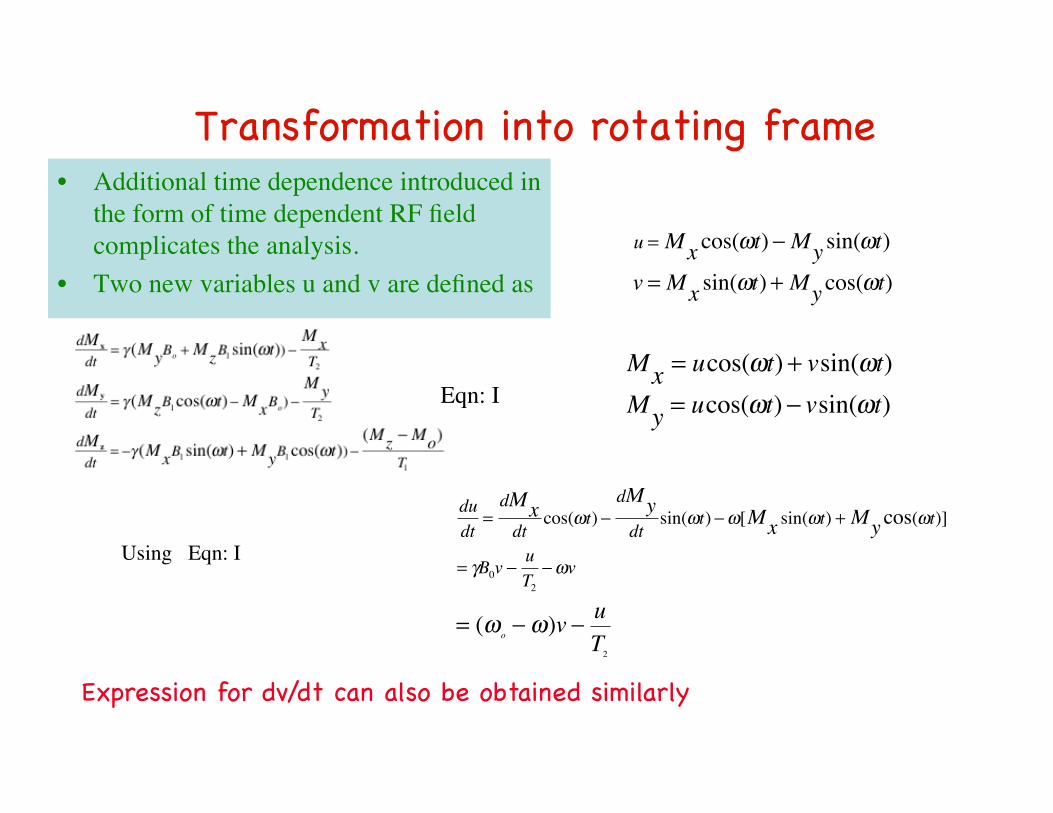
Transformation into rotating frame�• Additional time dependence introduced in
the form of time dependent RF field complicates the analysis.
• Two new variables u and v are defined as
�
u = Mxcos(ωt)−M
ysin(ωt)
v = Mxsin(ωt)+ M
ycos(ωt)
�
Mx
= ucos(ωt)+ vsin(ωt)
My
= ucos(ωt)− vsin(ωt)
�
= (ωo− ω)v −
u
T2
Expression for dv/dt can also be obtained similarly �
du
dt=
dMx
dtcos(ωt) −
dMy
dtsin(ωt) −ω[M
xsin(ωt) + M
ycos(ωt)]
= γB0v −
u
T2
−ωvUsing Eqn: I
Eqn: I
Rotating frame solutions�
• Usually u and v are written as Mx’ and My’ respectively. We will drop the primes here and now on we will work in the rotating frame with the following equations�
�
du
dt= (ω
o−ω)v −
u
T2
dv
dt= −(ω
o−ω)u + ω1Mz
−v
T2
dMz
dt= −ω1v −
(Mz−M
o)
T1
�
dMx
dt= (ω
o−ω)M
y−
Mx
T2
dMy
dt= −(ω
o−ω)M
x+ ω
1Mz−
My
T2
dMz
dt= −ω1My
−
(Mz−M
o)
T1
Full Bloch equations in rotating frame�
Steady state solutions�
• If we assume that the system has been allowed to soak in this combination of of static and time varying fields a steady state ultimately will be reached in which none of the components change with time: � �
δω = (ωo−ω)
ω1 = γB1
• now on we will work in the rotating frame with the following eqautions�
�
Mx =ω1T22δω
1+ ω12T1T2
+ (T2δω)2
Mo
My =ω1T2
1+ ω12T1T2
+ (T2δω)2
Mo
Mz =1+T
22δω2
1+ ω12T1T2
+ (T2δω)2
Mo
(ωo −ω )My −MxT2
= 0
−(ωo −ω )Mx +ω1Mz −MyT2
= 0
−ω1My −(Mz −Mo)
T1= 0

Steady state solutions in the limiting case�
• In the limiting case of small RF limit,
�
�
ω1
2T1T2
<< 1
�
Mx≈ (ω
1Mo)
T2
2δω
1+ (T2δω)
2= ω
1MoG(δω)
My≈ (ω1Mo
)T2
1+ (T2δω)
2= ω1Mo
F(δω)
• The functional forms F and G are the absorption and dispersion for a particular kind of line known as a Lorentzian line.
�
�
G(δω) =
T2
2δω
1+ (T2δω )
2
F(δω) =
T2
1+ (T2δω )
2
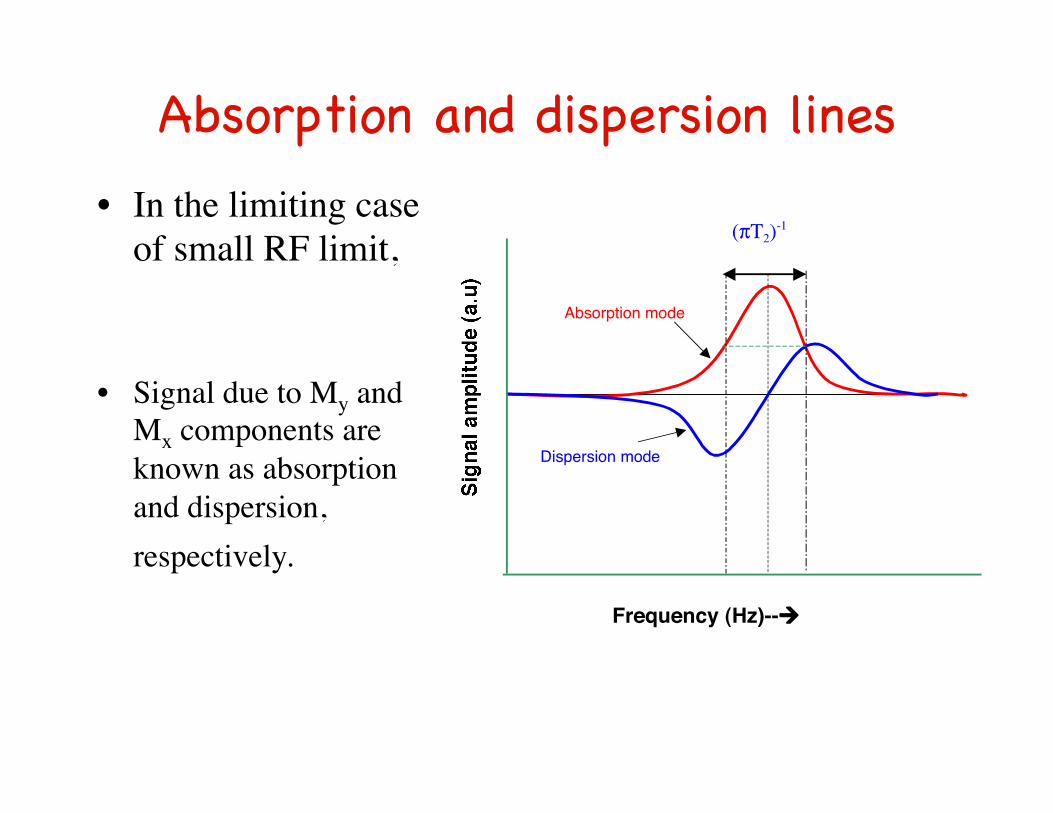
Absorption and dispersion lines�• In the limiting case
of small RF limit, �
• Signal due to My and Mx components are known as absorption and dispersion, respectively. �
(πT2)-1
Frequency (Hz)--
Absorption mode
Dispersion mode
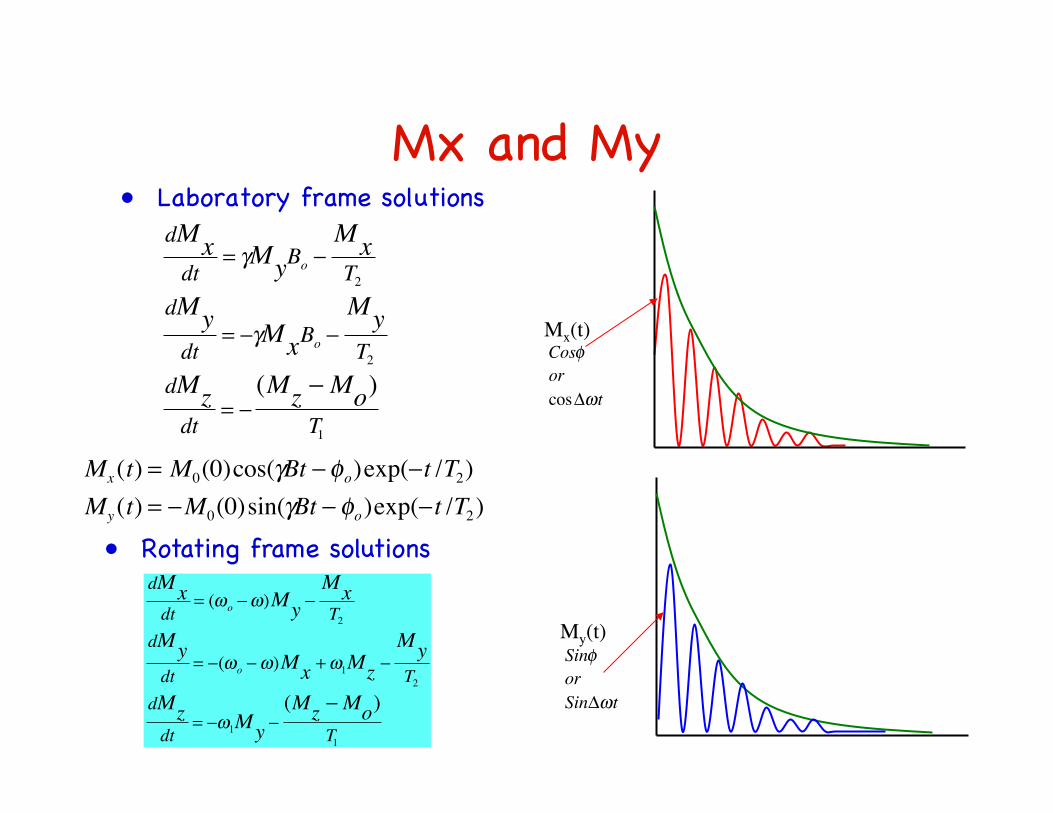
Mx and My�• Laboratory frame solutions�
�
dMx
dt= γM
yBo−Mx
T2
dMy
dt= −γM
xBo−
My
T2
dMz
dt= −(M
z−M
o)
T1
�
dMx
dt= (ω
o−ω)M
y−
Mx
T2
dMy
dt= −(ω
o−ω)M
x+ ω
1Mz−
My
T2
dMz
dt= −ω1My
−
(Mz−M
o)
T1
• Rotating frame solutions�
�
Mx (t) = M0(0)cos(γBt −φo)exp(−t /T2)
My (t) = −M0(0)sin(γBt − φo)exp(−t /T2)
Mx(t) CosφorcosΔωt
My(t) SinφorSinΔωt
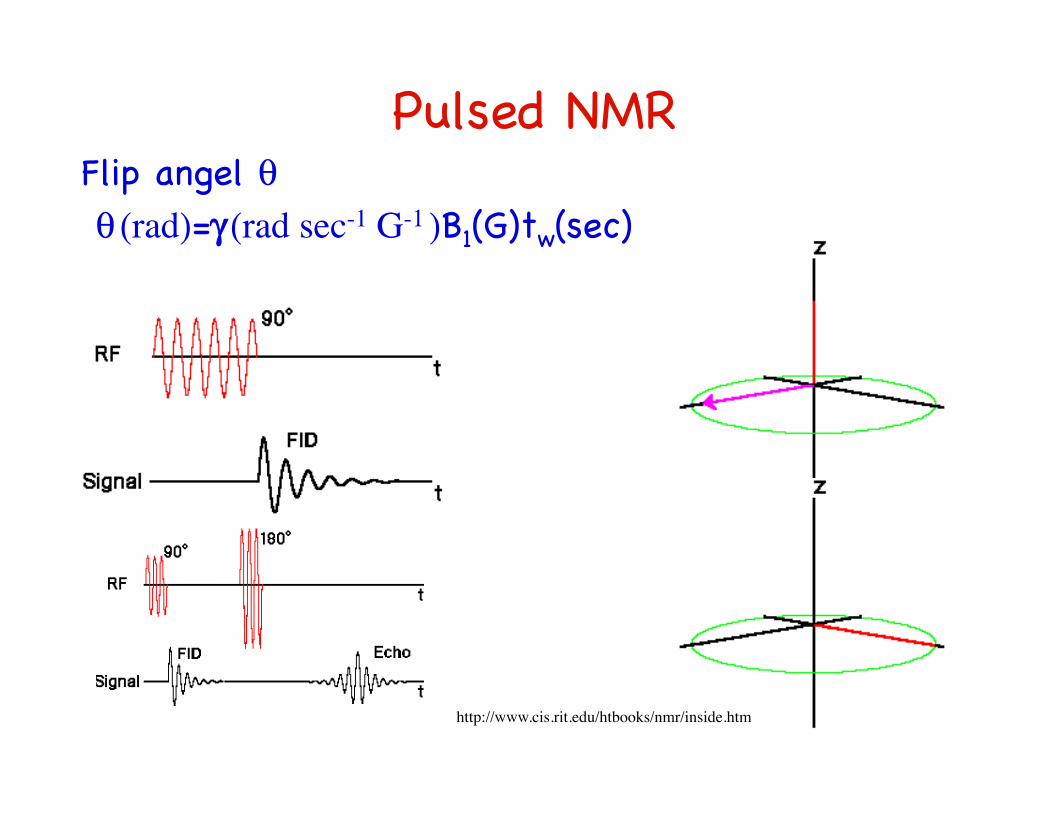
Pulsed NMR �Flip angel θ θ (rad)=γ (rad sec-1 G-1 )B1(G)tw(sec)�
http://www.cis.rit.edu/htbooks/nmr/inside.htm
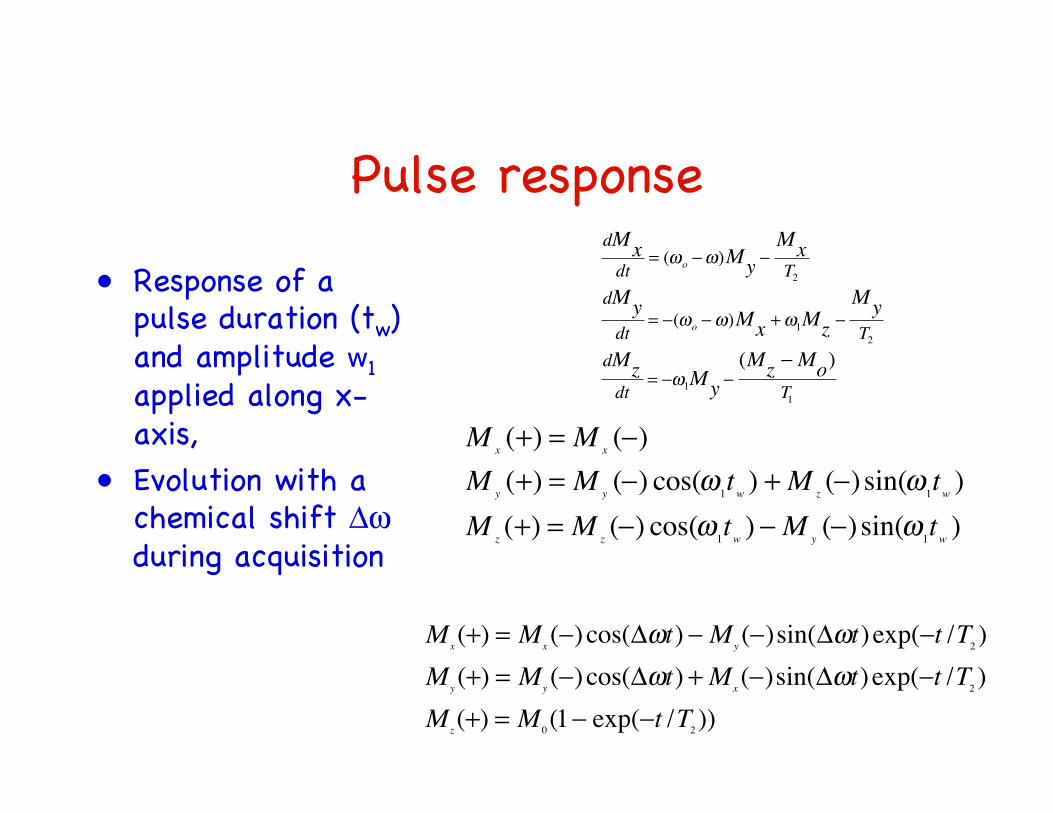
Pulse response�
• Response of a pulse duration (tw) and amplitude w1 applied along x-axis,�
• Evolution with a chemical shift Δω during acquisition �
�
M x (+) = M x (−)M y (+) = M y (−) cos(ω1tw ) + M z (−) sin(ω1tw )M z (+) = M z (−) cos(ω1tw ) −M y (−) sin(ω1tw )
�
Mx(+) = M
x(−) cos(Δωt) − M
y(−)sin(Δωt) exp(−t /T
2)
My(+) = M
y(−) cos(Δωt) + M
x(−)sin(Δωt) exp(−t /T
2)
Mz(+) = M
0(1− exp(−t /T
2))
�
dMx
dt= (ω
o−ω)M
y−
Mx
T2
dMy
dt= −(ω
o−ω)M
x+ ω
1Mz−
My
T2
dMz
dt= −ω1My
−
(Mz−M
o)
T1
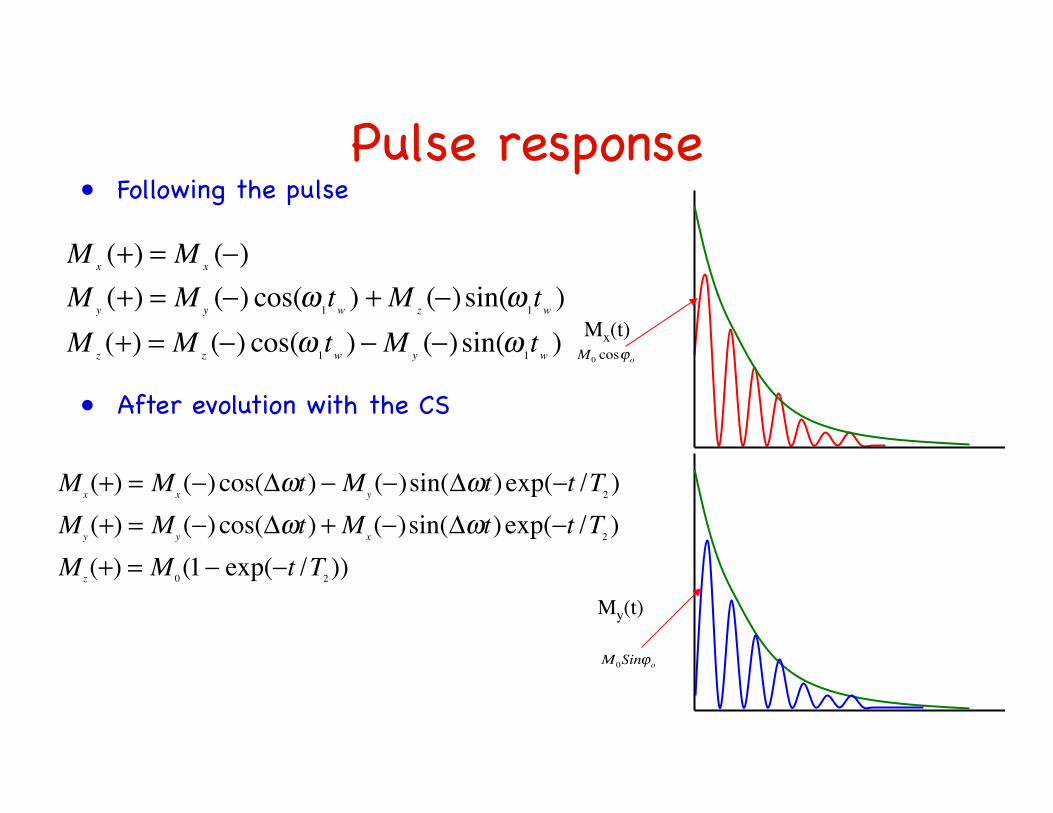
Pulse response�• Following the pulse�
My(t)
M 0Sinϕo
Mx(t) M 0 cosϕo
�
M x (+) = M x (−)M y (+) = M y (−) cos(ω1tw ) + M z (−) sin(ω1tw )M z (+) = M z (−) cos(ω1tw ) −M y (−) sin(ω1tw )
�
Mx(+) = M
x(−) cos(Δωt) − M
y(−)sin(Δωt) exp(−t /T
2)
My(+) = M
y(−) cos(Δωt) + M
x(−)sin(Δωt) exp(−t /T
2)
Mz(+) = M
0(1− exp(−t /T
2))
• After evolution with the CS�
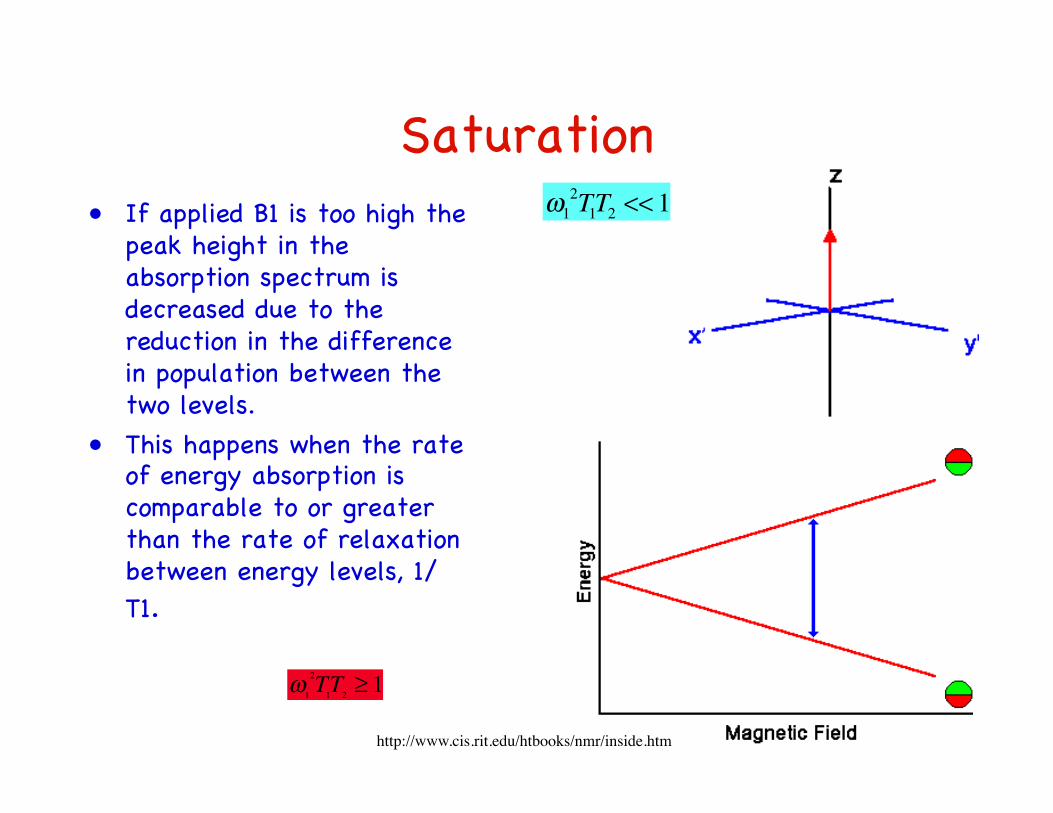
Saturation �• If applied B1 is too high the
peak height in the absorption spectrum is decreased due to the reduction in the difference in population between the two levels. �
• This happens when the rate of energy absorption is comparable to or greater than the rate of relaxation between energy levels, 1/T1. �
�
ω1
2T1T2
<< 1
�
ω1
2T1T2 ≥ 1
http://www.cis.rit.edu/htbooks/nmr/inside.htm

Nuclear receptivity�• In Steady state NMR
experiment the spin system can absorb energy from RF at a rate R is depends on transition probability p, energy level separation, ΔE and population difference Δno �
• NMR detected signal ~ dMy/dt =R/B1 �
�
R = pΔEΔno ∝ γ 4B0
2NB1
2g(ω) / kT
�
S ∝ R /B1 ∝ γ 4B0
2NB1g(ω) / kT
�
Δno = NΔE /2kTp∝ γ 2B1
2g(ω)ΔE = γBo
�
B1(opt) = (γ 2T1T2 )−1/ 2
Limitations of BE�
• Can not be used to analyze other interactions such as J-, dipolar and quadrupolar�
• 2D NMR �• Higher spin (I>1/2)
interactions�• MQ coherences can not
be explained�
• Molecular motional processes (T1 and T2) and field inhomogeneity�
• Gradient manipulation and MR imaging �





























