Embed Size (px)
Citation preview

Motor dan Rangkaian Kontrol
BAB I MOTOR DAN RANGKAIAN KONTROL
1.1 MOTOR DC.
a. MENJALANKAN MOTOR
Ketika motor akan dijalankan, kecepatan dan tegangan induksi Ea masih sama
dengan nol. Sehingga sesuai dengan persamaan bahwa :
Ia = (Vt – Ea)/Ra,
untuk Ea = 0 dan Ra yang cukup kecil maka arus Ia yang mengalir akan besar sekali.
Oleh karena itu untuk membatasi arus jangkar Ia yang sangat besar pada waktu
motor saat dijalankan maka perlu dipasang tahanan mula yang dipasang seri terhadap
tahanan jangkar. Secara perlahan lahan tegangan induksi dibangkitkan dan rotorpun mulai
berputar. Bersamaan dengan ini tahanan mula pun secara perlahan-lahan diturunkan.
Sehingga besarnya arus jangkar (Ia) adalah :
Ia = (Vt – Ea)/Rx,
dimana : Rx – besarnya tahanan jangkar dan tahanan mula
Prinsip perencanaan tahanan mula adalah seperti pada gambar 1.1 sebagai berikut :
R3 R2 R1
Gambar 1.1 Perenca
Elektronika Industri 2
M
naan tahanan mula
1

Motor dan Rangkaian Kontrol
b. PENGATURAN KECEPATAN
Ada tiga metode untuk pengaturan kecepatan shunt wound motor, yaitu ; kuat
medan, tahanan pengaturan dan pengaturan tegangan armatur. Kecepatan motor dapat
dijelaskan pada persamaan berikut :
N = ( Va – Ia.Ra)/φf
Dari persamaan yang ditunjukkan diatas maka kecepatan dapat diubah ubah dengan
mengatur variabel ; Va , Ra dan φf
Jika kuat medan magnit dikurangi, maka kecepatan motor akan naik. Kenaikan
kecepatan ini terjadi dengan pengurangan kuat medan sebab antara tegangan jala-jala dan
cemf yang baru menghasilkan pertambahan arus armatur, sehingga akan terjadi pertambahan
torsi keluaran. Torsi T dikaitkan dengan flux (φ.f) dan arus armatur (Ia) adalah sesuai dengan
persamaan berikut :
T = K.φf.Ia
Medan dapat dilemahkan dengan menghubungkan rheostat pada rangkaian medan
seperti ditunjukan pada gambar 1.2(a). Persamaan yang menunjukkan kuat medan yang
menambah kecepatan dengan tegangan armatur yang konstan. Pada standart industri, motor
akan diijinkan kecepatannya bertambah sampai dengan 400 %. Metode pengaturan
kecepatan ini lebih efisien sebab power yang hilang pada medan rheostat dapat diabaikan.
Tetapi medan itu hanya dilemahkan pada limit tertentu. Pelemahan dibawah titik limit dapat
menghasilkan kecepatan lebih dan tidak stabil. Dan armatur juga menjadi panas. Persamaan
torsi menunjukkan bahwa pengurangan flux (φ.f) akan menambah arus armatur (Ia)
sehingga memberikan torsi T. Kurva torsi-kecepatan untuk nilai yang berbeda beda dari
pertambahan tahanan R ditunjukkan pada gambar 1.2(b).
Elektronika Industri 2 2

Motor dan Rangkaian Kontrol
speed
Vdc
medan
i
(a) diagram skema (b) kurva torsi-kece
Gambar 1.2
Pengaturan kecepatan motor shunt yang di dasarkan pada penguatan medan
Memperlemah medan akan menghasilkan kecepatan diatas kecepatan raten
dapat mudah menjadi beban lebih sebab torsi drop karena pertambahan kecep
karena itu tipe pengaturan kecepatan ini dibatasi pada kasus kondisi beban yang te
dapat dikontrol. Perbedaan karakteristik terjadi untuk motor shunt dengan rhe
armatur. Dalam hal ini pengaturannya adalah kumparan medannya ditahan pad
jala-jala. Lihat lagi pada pada persamaan kecepatan, jika tegangan armatur Va
dengan pertambahan tahanan, kecepatan motor akan berkurang. Oleh karena it
pengaturan armatur akan lebih rendah dan kecepatan motor shunt akan dib
kecepatannya. Seperti ditunjukkan pada persamaan torsi, pertambahan be
menyebabkan pertambahan arus armatur sedikit sedikit akan timbul tegangan
seri dengan rheostat. Jika motor dilakukan dengan rate beban yang sangat
kemudian beban ditambah, maka kecepatannya akan jatuh secara tajam. Ha
berkaitan dengan I(I.R) yaitu power yang hilang pada rheostat.
Elektronika Industri 2
Tors
Rmak
Rmin
patan
ya. Motor
atan. Oleh
rtentu dan
ostat pada
a tegangan
dikurangi
u tahanan
awah rate
ban akan
drop yang
kecil dan
l ini juga
3

Motor dan Rangkaian Kontrol
Metode tahanan dengan melemahkan medan dan pengurangan arus armatur adalah
sangat sederhana dan murah. Dan akan berguna untuk pengaturan kecepatan shunt wound dc
motor dibawah nilai ratenya. Metode ini masih sangat banyak digunakan pada aplikasi
industri di lingkungan industri. Kedua rheostat seri dan rheostat paralel digunakan untuk
memperbaiki pengaturan kecepatan shunt wound motor. Operasi kecepatan dapat
dipengaruhi oleh perubahan torsi beban. Paralel armatur yang mempunyai variabel tahanan
paralel dengan armatur dan menambah arus yang melalui tahanan seri dan akan mengurangi
perbedaan antara tanpa beban dan arus beban penuh. Tahanan seri digunakan untuk
mengatur tegangan armatur, seperti metode pengaturan armatur pada motor shunt.
Metode tahanan untuk pengaturan kecepatan adalah dengan pengaturan loop terbuka
(tanpa feedback). Metode ini masih sering dipakai di industri. Motor sering dikontrol dengan
pengaturan bermacam macam tegangan armatur. Pengaturan tegangan armatur dapat
dengan loop terbuka atau loop tertutup. Gambar 1.3 menunujukkan pengaturan tegangan
armatur dengan open loop. Metode ini mempunyai beberapa keuntungan, yaitu :
1) Mempunyai range pengaturan kecepatan yang lebar.
2) Kecepatannya tidak tergantung dengan perubahan beban.
3) Mempunyai power yang rendah pada kecepatan rendah.
4) Mudah di interface dengan sistem pengaturan elektronik.
Elektronika Industri 2 4

Motor dan Rangkaian Kontrol
medan
Vdc
Gambar 1.3 Pengaturan kecepatan armatur
Gambar 1.4 menunjukkan rangkaian pengatur kecepatan motor dengan SCR.
Digunakannya UJT oscilator pada gambar 1.4 akan memberikan range yang lebih lebar
dari pengaturan kecepatan. Kedua rangkaian ini tanpa filter arus dc yang digunakan sebagai
sumber power. Tanpa filter sumber ini diperlukan untuk komutasi SCR. Pemulsaan arus dc
juga dipersiapkan untuk meng-OFF-kan UJT oscilator, sehinggan akan dimulai dengan
beban siklus yang baru pada tiap tiap siklus pemulsaan tegangan suppli. Tegangan yang
Elektronika Industri 2 5

Motor dan Rangkaian Kontrol
melalui kapasitor naik secara ekponensial. Jika ini melebihi tegangan yang didasarkan pada
tegangan yang melalui Base1-base2 UJT, maka akan terjadi penyalaan dan pulsa gate Vg
akan terbangkit. Tahanan pengaturan kecepatan menjadi besar, dan terjadi kelambatan pulsa
Vg dan kecepatan menjadi rendah.
Motor seri didisain untuk dioperasikan pada arus dc atau arus ac dan mampu pada
kecepatan dan torsi starting yang tinggi. Kecepatan motor seri dapat diubah dengan
mengubah tegangan yang melalui motor. Hal ini dapat disempurnakan dengan tiga metode,
yaitu : pengaturan tahanan seri, pengaturan tahanan paralel (shunt) dan pengaturan
variabel tegangan. Kurva kecepatan-torsi dapat diperoleh dengan menggunakan rheostat
yang diseri dengan motor, seperti pada gambar 1.5(a). Pengaturan tahanan seri
mempunyai karakteristik starting yang baik ( mempunyai torsi tinggi pada kecepatan
rendah). Tahanan seri akan meyebabkan drop tegangan pada rangkaian yang proporsional
dengan arusnya. Tegangan drop ini melalui resistor yang akan menambah beban motor.
Tegangan yang melalui motor akan berkurang dengan bertambahnya beban dan kecepatan
akan turun secara drastis dengan pertambahan beban. Juga dengan tahanan yang lebih besar,
kecepatan dropnya juga bertambah besar karena bebannya bertambah. Resistor seri akan
mempunyai pengaruh yang sangat besar pada torsi starting. Arus maksimum akan mengalir
bila motor di-start dan nilai tahanannya akan jatuh yang akan menyebabkan nila
tegangannya sangat rendah. Resistor seri biasanya akan diatur untuk starting dengan
tahanan minimum dan penguatan kecepatan motor bertambah. Di dalam teori motor
dapat diatur mendekati berhenti.
Pengaturan tahanan shunt pada motor seri (kurva kecepatan torsi) ditunjukkan pada
gambar 1.5(b). Motor seri dapat juga dikontrol dengan mengatur tahanan paralel yang
melalui armatur. Range pengaturan kecepatan pada metode ini biasanya dibatasi karena
bertambahnya arus harus melalui kumparan medan dan menyebabkan pertambahan panas.
Walaupun range kecepatan dibatasi, metode ini memperbaiki pengaturan kecepatan,
sebagaimana ditunjukkan pada kurva, jika dengan starting torsi yang baik. Ini adalah
metode yang sangat baik untuk menyesuaikan kecepatan pada saat dioperasikan paralel
Elektronika Industri 2 6

Motor dan Rangkaian Kontrol
Gambar 1.5 Metode pengaturan kecepatan Motor Seri
Jika motor seri dijalankan pada arus ac sebaik dengan arus dc, maka pengaturan dapat
dengan setengah gelombang atau gelombang penuh. Pengaturan setengah gelombang dapat
dengan menggunakan SCR. dan operasinya seperti pada gambar 1.4.
Elektronika Industri 2 7

Motor dan Rangkaian Kontrol
Bila dengan pengoperasian arus ac, maka pengaturan dengan gelombang penuh dapat
dilakukan seperti yang ditunjukkan pada gambar 1.6. Ini adalah pengaturan dengan open
loop. Waktu pengisian kapasitor dan waktu pentrigeran dilakukan dengan mengatur
tahanan R2. Bila diac di triger maka triac akan ON.
medan
DIAC
Gambar 1.6 Pengaturan kecepatan dengan Triac gelombang penuh
c. PENGEREMEN MOTOR
Motor bila tidak dihubungkan dengan sumber daya maka mo
Bila diperlukan untuk menghentikan motor dengan cepat mak
pengereman. Pengereman dapat dilakukan dengan beberapa m
untuk menurunkan kecepatan motor yaitu secara aksi mekanis, ak
Aksi dinamik atau pengereman dengan listrik dapat di
hubungan ke motor dengan atau tanpa menggunakan sumber day
berjalan maka akan berfungsi sebagai generator dan dihungka
merupakan pengereman dinamik. Motor itu akan secara cepa
energi mekanik ke dalam energi listrik dan disipasi energ
Pengereman dinamik hanya ada bila motor sedang berputa
digunakan untuk pemeriksaan beban setelah ber henti.
Elektronika Industri 2
Motor Seri
Triacs
tor akan meluncur berhenti.
a dapat dilakukan dengan
etode. Ada tiga cara dasar
si dinamik dan plugging.
lakukan dengan mengubah
a bantu. Jika motor sedang
n dengan beban hasilnya
t. Aksi generator merubah
i ini ada pada (tahanan).
r, tipe mekanis ini yang
8

Motor dan Rangkaian Kontrol
Pada shunt wound dc motor untuk tujuan pengereman listrik, jika mesin dioperasikan
sebagai motor, cemf (counter electromotive force) akan menentang tegangan jala-jala
armatur. Pengereman dinamik diperbaiki dengan tidak menghubungkan armatur dari sumber
power dan tempat pembatas arus tahanan melalui terminal armatur. Armatur akan diputar
pada medan magnit dan selanjutnya akan membangkitkan cemf yang proporsional dengan
kuat medan. Arus armatur yang melalui resistor akan berlawanan dengan yang dihasilkan
tegangan jala-jala. Pembalikan arus ini pada armatur akan menghasilkan torsi yang
berlawanan dengan aksi motor sebenarnya dan menyebabkan putaran motor turun. Untuk
mengurangi kecepatan maju, tegangan pembangkitan juga dikurangi Cara hubungan
pengereman dinamik dari shunt wound dc motor, ditunjukkan pada gambar 1.7
M
Run Stop
Emedan
Gambar 1.7 Pengereman motor dc shunt wound
Resistor dipilih biasanya arus pengereman awal 150 % dari arus normal. Kumparan
medan dapat disambung atau tak disambung ke armatur motor yang telah terhenti. Bila
rheostat medan digunakan, biasanya hubung singkat menambah medan membantu dalam
pengereman. Pengereman dinamik menggunakan motor seri seperti ditunjuk kan pada
gambar 1.8, tetapi hubungannya lebih lengkap. Jika motor tidak dihubungkan ke jala-jala
yang paralel dengan tahanan maka tak akan ada pengereman. Hal ini dikarenakan arus yang
mengalir melalui medan mempunyai arah yang salah ( terjadi demagnetisasi medan ).
Elektronika Industri 2 9

Motor dan Rangkaian Kontrol
Bila motor berjalan dan arus mengalir, cemf dari armatur berlawanan. Arus medan
mengalir dari jala-jala. Supaya terjadi pengereman maka medan harus dihubungkan dalam
arah yang berlawanan sehingga arus mengalir dalam arah yang sama ketika motor
dihubungkan dengan jala-jala. Bila switch pada posisi 2, resistor dihubungkan secara seri
dengan medan dan armatur. Hal yang perlu dicatat adalah hubungan medan dibalik sehingga
arus yang mengalir menyebabkan emf armatur dalam arah yang sama sama seperti pada
saat dihubungkan sebagai motor. Energi akan secara cepat didisipasikan ke resistor dan
armatur akan berhenti berputar.
M
Stop Run
Stop
Stop
Run
Run
E medan
Gambar 1.8 Pengereman motor dc seri
Kombinasi pengereman dinamik dan pengereman mekanis dapat digunakan bila beban
sangat besar yang harus dihentikan. Sebab gaya beban akan digunakan sebagai pengereman
mekanis juga secara cepat, pengereman dinamik juga digunakan untuk memperlambat beban
dan kemudian pengereman mekanis dipakai sebagai akhir dari pengereman dan menahan
beban jika diperlukan.
Elektronika Industri 2 10

Motor dan Rangkaian Kontrol
Pengereman dinamik pada permanen magnit (PM) motor dapat menggunakan dengan
cara yang sama dengan shunt wound motor, yaitu : armatur tidak dihubungkan dan terminal
diparalel dengan resistor. Perbedaan yang ada bila dengan shunt wound motor adalah
motor tidak dapat secara dinamik untuk di rem jika power dihilangkan. Arus medan harus
ada untuk membangkitkan untuk pengereman dinamik. Dengan PM motor maka
penghilangan power tidak mempengaruhi kemampuan pengereman sebab medannya tidak
terpengaruh. Relay yang normal tertutup (normally closed relay) melalui armatur akan
secara otomatis fungsi disini power dihilangkan dan beban armatur yang melaluinya
sebagai tahanan pengereman. Karakteristik ini penting dan sangat berguna. Misalnya dapat
digunakan pada driver magnetik tape reel untuk mencegah hal yang tidak diinginkan dalam
peniadaan power.
d. Pengaturan Motor DC dengan Mikroprosesor
Dalam pengaturan motor DC dapat dilakukan pada potensial armatur atau potensial
rotornya dengan metode Pulse Width Modulation (PWM), seperti ditunjukkan pada gambar
1.10.
Transistor dioperasikan sebagai metode switching pada frekwensi tinggi dengan
signal yang dibangkitkan dari mikroprosesor. Potensial rata-rata yang digunakan pada rotor
proporsional dengan rasio waktu, yaitu :
Rasio waktu = Ton/(Ton + Toff)
dimana : Ton - periode transistor pada siklus menutup
Toff - periode transistor pada siklus membuka
Kecepatan motor dapat dikontrol dengan mengatur rasio waktu bertambah atau
berkurang sehingga kecepatan dapat bertambah atau berkurang.
Elektronika Industri 2 11

Motor dan Rangkaian Kontrol
Gambar 1.9
Rangkaian transistor untuk kontrol kecepatan dengan menggunakan PWM untuk menjalankanmotor dc.
Gambar 1.10
Bermacam-macam kecepatan motor dc dengan PWM dengan sinyal dari mikroprosessor.
Elektronika Industri 2 12

Motor dan Rangkaian Kontrol
Tabel 1.1
Program untuk membangkitkan sinyal PWM untuk kecepatan variabel untuk menjalankan motor DC
ORG 8500H ;
MAIN ROUTINE 00FD DRIVE EQU 0FDH 8500 01 0100 START: LD BC, 0100H ; 8503 3E 01 ON1: LD A,1 8505 D3 FD OUT (DRIVE),A 8507 50 LD D,B 8508 CD 8530 CALL WIDTH 850B 3E 00 OFF1: LD A,0 850D D3 FD OUT (DRIVE),A 850F 51 LD D,C 8510 CD 8530 CALL WIDTH 8513 04 INC B 8514 OD DEC C 8515 C2 8503 JP NZ, ON1 ; 8518 3E 01 ON2: LD A,1 851A D3 FD OUT (DRIVE), A 851C 51 LD D,C 851D CD 8530 CALL WIDTH 8520 3E 00 OFF2: LD A, 0 8522 D3 FD OUT (DRIVE), A 8524 50 LD D,B 8525 CD 8530 CALL WIDTH 8528 04 INC B 8529 OD DEC C 852A C2 8518 JP NZ, 0N2 ; 852D C3 8500 JP START ; Pulse Width Subroutine 8530 15 WIDTH: DEC D 8531 00 NOP 8532 00 NOP 8533 00 NOP 8534 00 NOP 8535 C2 8530 JP NZ,WIDTH 8538 C9 RET
END
Elektronika Industri 2 13

Motor dan Rangkaian Kontrol
1.2 MOTOR STEPPER
Motor Stepper sering digunakan dalam peralatan digital untuk mengubah dari sinyal
pulsa menjadi putaran atau gerakan mekanik. Setiap putaran poros motor berupa putaran step
yang diskrit. Motor dapat diubah dengan mudah arah putarannya yaitu searah jarum jam
(CW) dan berlawanan jarum jam (CCW). Motor ini berbeda dengan jenis motor lainnya yaitu
putaran poros motor tergantung sinyal pulsa yang diberikan, tetapi untuk motor jenis lainnya
putarannya bebas.
a. CIRI – CIRI MOTOR STEPPER
Motor ini mempunyai keistimewaan yaitu motor ini hanya berhenti dan berputar
tergantung dari input komando berupa pulsa yang diberikan dan motor ini mudah diatur
kecepatan dan arah putarannya tergantung kondisi sinyal pulsanya. Motor ini mempunayi
ciri-ciri utama sebagai berikut :
• Sudut putarannya digital dan mempunyai sudut putaran yang akurasi dan besarnya sudut
putaran (θs) tergantung jumlah pulsa inputnya (n) dan besar sudut putar per pulsanya
(θo) yaitu :
θs = n θo
• Tidak memerlukan rangkaian analog/digital konverter.
• Pengautran kecepatan mempunyai jangkauan yang lebar.
• Rangkaian driver motor sederhana. Motor ini dapat dijalankan dengan rangkaian logic
dari sinyal pulsa dan switching yang keduanya dikontrol secara digital.
• Mempunyai karakteristik yang baik pada saat motor berhenti, sehingga motor ini tidak
memerlukan spesial fungsi untuk menghentikan motor.
b. MACAM-MACAM MOTOR STEPPER
Motor ini dibagi dalam tiga macam prinsip yaitu Permanen Manit (PM), Variabel
Reluktansi (VR) dan PM Hibrid.
• Motor stepper tipe PM
Motor ini diklasifikasikan dalam dua tipe yaitu sudut besar dan sudut kecil sesuai dengan
ukuran sudut stepnya. Motor stepper sudut beasr mempunyai sudut step per pulsa sebesar
Elektronika Industri 2 14

Motor dan Rangkaian Kontrol
90 o , 60 o dan 45 o dan motor ini plikasinya terbatas untuk mesin-mesin ukuran kecil,
misalnya untuk gyro repeater kontrol untuk penerbangan, printer komputer, dan lain-lain.
Motor stepper sudut kecil mempunyai sudut step per pulsa 7,5 o sampai dengan 11,25 o
per pulsa.
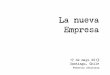
• Motor Stepper tipe VR
Prinsip kerja motor ini didasarkan pada prinsip stator dan rotor yang dilengkapi dengan
kutub menonjol (penampang melintang motor ini seperti pada gambar 1.11). Motor ini
umumnya terdiri atas motor tiga phasa dengan sudut step 15 derajad dan akurasi sudut
lebih tinggi dari pada yang tipe magnet permanen. Motor ini apabila dijalankan tanpa
beban, responnya lebih besar dari 1000 pulsa per detik dan mempunyai kecepatan yang
tinggi. Motor ini kurang menguntungkan karena mudah dipengaruhi oleh beban inersia.
Motor ini sering digunakan untuk pengaturan posisi magnetig tape, floppy disk dan lain-
lain.
Gambar 1.11 Penampang melintang motor stepper tipe VR
• Motor Stepper tipe Hibrid/Compound.
Motor ini dinamakan compound karena dikonstruksi kombinasi dari motor stepper tipe
VR dan PM dengan ciri-ciri khusus. Sudut stepnya biasanya 1,8 o ; 2 o ; 3,6 o ; 5 o .
Elektronika Industri 2 15

Motor dan Rangkaian Kontrol
Motor ini mempunyai karakteristik torsi yang tinggi, akurasi sudut yang tinggi dan respon
frekwensi yang tinggi. Ukuran motor ini bervariasi, mulai daru ukuran yang kecil (
beberapa ratus g-cm) sampai ukuran besar ( beberapa kg-cm atau 1 Hp). Penampang
melintang motor ini seperti pada gambar 1.12. Dalam hal lain motor ini tidak efisien
energi tetapi mempunyai karakteristik yang baik.
Gambar 1.12 Penampang melintang motor stepper tipe Hibrid/compound
c. SISTEM EKSITASI MOTOR STEPPER
Untuk menjalankan motor stepper dapat dilakukan dengan beberapa
eksitasi, misalnya untuk motor stepper 4-phasa, yang meliputi :
• Eksitasi 1-phasa
Eksitasi ini untuk mendapatkan karakteristik yang terlihat jelas akurasi
susdut stepnya, seperti pada tabel berikut :
Phasa
Step
P1
P2
P3
P4
1 1 0 0 0
2 0 1 0 0
3 0 0 1 0
4 0 0 0 1
Elektronika Industri 2 16

Motor dan Rangkaian Kontrol
• Eksitasi 2-phasa
Eksitasi ini untuk mendapatkan karakteristik motor berhenti setimbang
antara dua phasa A dan B dan dengan cara ini torsi outputnya akan
bertambah 20% sampai 40%. Eksitasinya seperti pada tabel berikut :
Phasa
Step
P1
P2
P3
P4
1 1 1 0 0
2 0 1 1 0
3 0 0 1 1
4 1 0 0 1
• Eksitasi 1-2 phasa
Eksitasi ini untuk mendapatkan karakteristik putaran motor yang halus.
Sudut stepnya menjadi setengah 1-phasa dan 2-phasa eksitasi (titik
stabil rotor menjadi dua kali, respon frequensi menjadi dua kali).
Eksitasi ini seperti pada tabel berikut :
Phasa
Step
P1
P2
P3
P4
1 1 0 0 0
2 1 1 0 0
3 0 1 0 0
4 0 1 1 0
5 0 0 1 0
6 0 0 1 1
7 0 0 0 1
8 1 0 0 1
Elektronika Industri 2 17

Motor dan Rangkaian Kontrol
d. PENGATURAN MOTOR STEPPER DENGAN MIKROPROSESOR
Gambar dibawah ini menunjukkan rangkaian pengemudi motor stepper
4-phasa (gambar 1.13) dan akan dijalankan dengan mikroprosesor Z-80
(flowchart pada gambar 1.14).
VCC+12v
Gambar 1.13 Rangkaian pengemudi motor stepper 4-phasa
Untuk menjalankan motor stepper 3-phasa dengan mikroprosesor maka dapat dilihat
flowchart pada gambar 1.14, dan sebagai contoh menggunakan eksitasi 1-phasa dan
programnya dapat dilihat pada tabel 1.2.
Elektronika Industri 2 18

Motor dan Rangkaian Kontrol
START
B
Gambar 1.14 Flowchart menjalankan m
Elektronika Industri 2
OUTPUT 00000001
TIMER
OUTPUT 00000010B
OUTPUT 00000100B
TIMER
TIMER
otor stepper 3-phasa
19

Motor dan Rangkaian Kontrol
Tabel 1.2 : Program menjalankan motor stepper 3-phasa
ORG 8400H
MAIN ROUTINE ;
;
00FD DRIVE EQU OFDH
;
8400 3E 02 LOOP: LD A,01H
8402 D3 FD OUT (DRIVE),A
8404 CD 8418 CALL TIME
8407 3E 08 LD A,02H
8409 D3 FD OUT (DRIVE),A
840B CD 8418 CALL TIME
840E 3E 20 LD A,04H
8410 D3 FD OUT (DRIVE),A
8412 CD 8418 CALL TIME
8415 C3 8400 JP LOOP
;
TIME SUBROUTINE ;
;
8418 06 64 TIME: LD B,100
841A 0E 64 LOOPA: LD C,100
841C 0D LOOPB: DEC C
841D C2 841C JP NZ,LOOPB
8420 05 DEC B
8421 C2 841A JP NZ,LOOPA
8424 C9 RET
END
Elektronika Industri 2 20

Motor dan Rangkaian Kontrol
1.3 PENGATURAN MOTOR AC
a. CYCLOCONVERTER
Cycloconverter digunakan untuk mengubah arus ac frequensi tinggi ke frequensi rendah.
Rangkaian dasar ditunjukkan pada gambar 1.15, yang mempunyai dua pulsa fasa konverter
kontrol. Satu grup positip dan satu grup yang lain negatip, yang disebut dengan dual
konverter. Arus output tiap grup hanya mengalir melalui satu arah. Untuk menghasilkan arus
ac pada beban, kedua grup dihubungkan secara paralel. Grup positip (SCR1 dan SCR3) arus
beban mengalir positip setengah siklus, bila V(AN) dan V(BN) positip, dan grup negatip
(SCR2 dan SCR4) arus beban mengalir negatip setengah siklus, bila V(AN) dan V(BN)
negatip. Bentuk gelombang seperti pada gambar 1.16 dan diasumsikan sebagai beban
induktif. Tegangan V(AN) dan V(BN) mempunyai fasa keluaran 180 derajad. Dengan
bermacam-macam titik penyulutan thyristor (t1 sampai t4) dan tegangan output beban dapat
bervariasi seperti ditunjukkan pada gambar 1.16.
TRAFO CT
BEBAN
V(BN)
V(AN)
SCR4
SCR2
SCR3
Grup positip
Grup negatip
SCR1
Gambar 1.15 Cycloconverter
Elektronika Industri 2 21

Motor dan Rangkaian Kontrol
Gambar 1.16 Sinyal gelombang Cycloconverter
b. INVERTER
Gambar 1.17 menjelaskan prinsip pembangkitan tegangan phasa tunggal dari dc ke
ac dengan menggunakan rangkaian H-bridge. Arus dc dialirkan ke beban melalui switch S1
dan S2. Pada kondisi (1), S1 pada A dan S2 pada B, oleh karena itu tegangan positip
dialirkan ke beban. Pada kondisi (3), S1 pada B dan S2 pada A, oleh karena itu tegangan
negatip dialirkan ke beban. Pada kondisi (2) dan (4) kedua switch pada B dan pada A. Bila
kondisi (1) dan (3) pembalikannya diulang, maka gelombang tegangan segi empat akan
melalui beban, seperti pada gambar 1.17(a). Jika kondisi (2) atau (4) maka potensial
beban nol, dan bentuk elombang (b) akan diperoleh. Pada tabel A yang atas untuk inverter
dengan switch S1 dan S2. Jika dua switch diganti kembali dengan transistor, skema dasar
dari H-bridge inverter ditunjukkan pada gambar 1.12.
Elektronika Industri 2 22

Motor dan Rangkaian Kontrol
BEBAN E
BEBAN EBEBAN E
BEBAN
S1 S2
S1 S2S1
S1 S2
(2) (1)
S2E
(3 (4)
Gambar 1.17
Prinsip dasar phasa tunggal bridge inverter
BEBAN
Tr4
Tr3
Tr2
Tr1
E
Gambar 1.18
Bridge inverter dengan menggunakan empat transistor dan empat diode
Elektronika Industri 2 23

Motor dan Rangkaian Kontrol
Empat transistor juga empat diode diperlukan. Bila Tr1 ON dan Tr2 OFF maka
terminal A pada potensial C. Sebaliknya bila Tr1 OFF dan Tr2
ON maka potensialnya GND. Kesamaannya bila Tr3 ON dan Tr4 OFF maka
terminal B pada C. Bila kondisi switching berlawanan maka akan berada pada GND. Bila
kondisi switching diubah dari satu keadaan ke keadan lain antara dua pasang transistor
maka kedua transistor harus di OFF kan untuk waktu yang singkat. Hal ini untuk
menghindari adanya short circuit pada keadaan transien dimana dua transistor secara
simultan akan menutup. Disini switching dari keadaan ON ke keadaan OFF pada transistor
secepat mungkin, sementara itu switching dari OFF ke ON harus dibawah keluar dengan
kelambatan tertentu.
Untuk mode lanjutan, jika urutan switching dipakai untuk menghasilkan petak
ON/OFF seperti ditunjukkan pada gambar 1.19 (a) dan (b), bentuk gelombang tegangan
timbul melalui beban seperti pada gambar 1.19(c). Teknik ini dikaitkan sebagai PWM
sinusoidal. Komponen dasar pada beban tegangan ditunjukkan oleh kurva garis patah
patah (c) dan komponen harmonis yang lebih tinggi sedikit berbeda untuk komponen
pulsa. Penggunaan dua H-bridge inverter (gambar 1.20) inverter dua phasa dapat
direalisasikan. Dan digunakan untuk menjalan kan motor induksi atau motor sinkron.
Elektronika Industri 2 24

Motor dan Rangkaian Kontrol
Gambar 1.19
Bentuk gelombang PWM untuk memperoleh gelombang sinusoidal dengan H-bridge inverter.
Tr1
Tr
Tr3
Tr4
Tr5
Tr6
PHASA 1 PHASA 2 E
Tr8
Tr7
Gambar 1.20 Konfigurasi dasar bridge inverter 2 phasa
Elektronika Industri 2 25

Motor dan Rangkaian Kontrol
V U W
Tr5 Tr3Tr1
E
Gambar 1.
Tipe 120 d
Urutan sw
tidak pad
arus dan
ditempatk
dibalik, m
dicatat ba
derajat tia
Tipe 180 d
Switching
terminal
terminal
ditunjukka
Elektronika
Tr6 Tr4
Tr
21 Konfigurasi dasar bridge inverter 3 phasa
erajat
itching pada gambar 1.22 ini ditentukan oleh aturan bahwa satu dari tiga switching
a terminal positip dan terminal negatip tetapi terbuka. Pada gambar ini distribusi
resultante medan magnit menunjukkan putaran medan magnit motor. Rotor
an pada medan magnit ini untuk memutar dalam arah yang sama. Jika urutan
edan magnit dan rotor disini akan berputar searah jarum jam. Ini yang seharusnya
hwa pada proses ini switch dihubungkan ke E dan GND untuk tiap tiap interval 120
p siklus.
erajat
tipe ini diimplementasikan tanpa periode OFF, yaitu tiap switch selalu pada
positip dan terminal negatip, tetapi harus dihindari semua switch pada keadaan
positip atau terminal negatip pada saat yang sama. Urutan putaran searah jarum jam
n pada gambar 1.22.
Industri 2 26

Motor dan Rangkaian Kontrol
(a) (b)
Gambar 1.22 Urutan switching inverter tipe 180 derajat (a) dan 120 derajad (b)
Elektronika Industri 2 27

Motor dan Rangkaian Kontrol
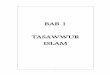
Pada tipe 180 derajat atau 120 derajat, medan magnit putar intervalnya pada 60 derajat.
Perbedaannya dapat dilihat pada bentuk gelombang tegangan. Gambar 1.23 mengilustrasikan
perbandingan dua metode urutan bila hubungan star dan delta digunakan. Alasan ini bahwa
(1/3)E dan (2/3)E muncul pada terminal tegangan dengan acuan ke netral pada pengoperasian
180 derajat, seperti yang dijelaskan pada gambar 1.24 dan gambar 1.25.
Pada beban induktif seperti motor induksi dijalankan pada 120 derajat maka bentuk
gelombang akan terdeviasi seperti yang digambarkan karena terminal potensial pada perioda
OFF akan dipengaruhi oleh kelakuan arus transien. Pada pengoperasian 180 derajat bentuk
gelombang line-to-line tidak tergantung pada karakteristik beban.
Gambar 1.23
Perbandingan gelombang tegangan antara120 derajat dan 180 derajat pada beban resistif ( dengan
hubungan bintang dan delta )
Elektronika Industri 2 28

Motor dan Rangkaian Kontrol
Gambar 1.24 Perbedaan metode hubungan Star dan Delta dengan metode 180 derajad
Gambar 1.25 Timbulnya besarnya gelombang sinyal 2/3E dan 1/3E
1.4 MOTOR DC BRUSHLESS
Motor brushless sudah secara luas digunakan di beberapa piranti listrik. Dengan
ditemukannya komponen-komponen baru menambah banyaknya aplikasi, sehingga dapat
menggantikan sikat komutator mekanik menjadi elektronik. Kekhususan dari motor dc
brushless mempunyai karakteristik torsi kecepatan yang hampir sama dengan motor dc
permanen magnit. Dengan kemajuan di bidang sensor posisi misalnya IC hall effect dan sensor
switching optik. Motor ini akan sangat baik apabila diaplikasikan sebagai tachometer feedback.
Motor ini mempunyai efisiensi yang tinggi, usia kerja yang panjang (long life),
mempunyai noise yang kecil dan komsumsi power yang lebih kecil.
Elektronika Industri 2 29

Motor dan Rangkaian Kontrol
Secara elektronik, motor dc brushless dioperasikan sama seperti motor dc konvensional,
hanya saja switching supply arusnya menggunakan rangkaian solid state. Pada motor ini
menggunakan transistor lojic sense untuk posisi motor magnit permanennya dan distribusi arus
komponen medannya. Kumparan medan diberikan energi dalam urutan medan magnitnya.
Posisi rotor dideteksi dengan solid state light emitter dan sensor, piranti hall atau piranti yang
lainnya. Sinyal feedback dari sensor dikembalikan ke kontrol unit yang akan meng-ON-kan
transistor unit, yang akan diterusakan ke kumparan medan stator secara sekuensial. Biasanya
untuk mendeteksi posisi sudut menggunakan hall effect dan sensor optik. Hall effect untuk
mendeteksi magnitud dan polaritas medan magnit.
SISTEM DRIVE MOTOR DC BRUSHLESS.
Bila inverter dalam keadaan normal dihubungkan pada drive yang menggunakan rotor
magnit yang permanen, akan didapat rotor tidak bekerja. Tetapi, jika sensor posisi telah
ditentukan dalam motor dan sinyal switch dijalankan dengan waktu yang tepat dalam
persesuaiannya dengan informasi posisi, maka motor akan bekerja seperti motor dc. Motor dc
brushless diberi arus listrik dari sumber arus dc, hal ini sesuai dengan karakteristik torsi VC
kecepatan motor dc, dan mempunyai keuntungan yang lebih banyak serta bebas dari
masalah-masalah pemakaian brush (sikat).
Gambar 1.27 Sistem drive motor dc brushless dengan menggunakan jembatan inverter tiga phase, mikroprocessor dan posisi kontrol
Elektronika Industri 2 30

Motor dan Rangkaian Kontrol
Pada gambar 1.27 ditunjukkan sistem drive motor dc brushless, pada sistem motor dc
brushless ini terdapat sensor hall yang digunakan sebagai sensor posisi.
Baik hubungan delta maupun hubungan bintang dapat digunakan pada sistem drive
motor dc brushless. Tetapi dalam hal ini menggunakan hubungan bintang, mengenai rangkaian
switch dari inverter 6-step metode konduksi 180 derajad merupakan rancangan dasar untuk
sistem pengaturan motor dc brushless. Sistem drive motor dc disini menggunakan sensor
posisi, dan mendapatkan informasi posisi dari sinyal output yang diberikan oleh sensor Hall
ELEMEN HALL SEBAGAI SENSOR POSISI
Pada umumnya metode yang digunakan untuk medeteksi posisi rotor angulator adalah
elemen Hall. Dan diantara beberapa posisi motor angula-tor, elemen Hall lebih banyak
digunakan sebagai sensor posisi. Pada beberapa motor, rotor magnit juga digunakn sebagai
sumber fluks untuk menganalisa tentang elemen-elemenHall.
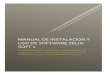
Prinsip elemen Hall
Gambar 1.28(a) menunjukkan prinsip dari sensor Hall. Jenis material semikon-duktor yang
digunakan sebagai butir elemen Hall adalah N-doped InSB. Elemen Hall membutuhkan arus
yang selalu mengalir bila digunakan sebagai pendeteksi fluks.
Bila butiran-butiran yang terdapat pada gambar 1.28(a) dimisalkan sebagai gambaran
medan magnit, maka daya elektromagnit dibuat atas dasar gerakan elektron seperti yang
diberikan oleh kaedah tangan kiri Fleming. Sewaktu daya elektron dibiaskan pada sisi kiri,
akibatnya kutup negatif disisi kiri dan kutup positip disisi yang lain (kanan). Polaritas
elektrostatik bergantung pada yang dialami butir apakah berkutup utara atau berkutup selatan,
dan digunakan untuk menyatakan sinyal pada posisi rotor dalam batas polaritas magnit.
Bila motor dc brushless menggunakan elemen Hall sebagai sensor posisi, maka semua
elemen-elemen penting dibuat dalam bentuk terpadu sesuai dengan yang ditunjukkan pada
gambar 1.28(b). Misalnya, jika level output adalah H untuk kutup utara, maka level output
akan L bila diletakkan pada kutup selatan. Dalam hal ini ketiga IC Hall digunakan sebagai
untuk drive motor tiga phase.
Elektronika Industri 2 31

Motor dan Rangkaian Kontrol
Pada dasarnya sensor akan ditempatkan pada 120 derajad untuk motor dua kutup seperti
yang ditunjukkan pada gambar 1.29. Tetapi sensor juga dapat dapat ditempatkan pada interval
60 derajad seperti pada gambar 129. Dari gambar ini dapat diketahui bahwa susunan 120
derajad dan 60 derajad hampir sama dengan motor 4 kutup atau lebih.
Elektronika Industri 2 32

Motor dan Rangkaian Kontrol
Gambar 1.28 Prinsip Elemen Hall
Gambar 1.29
Jumlah Kutub Magnet dan Susunan Elemen Hall
Elektronika Industri 2 33