Embed Size (px)
Citation preview

3 METODOLOGI
3.1 Lokasi dan waktu penelitian
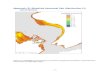
Lokasi dan waktu penelitian dilakukan di perairan sekitar Kepulauan
Togean, Kabupaten Tojo Una-una, Sulawesi Tengah dengan menggunakan KM
Napoleon milik Akademi Perikanan Bitung. Survei dengan menggunakan metode
hidroakustik dan oseanografi ini dilakukan pada tanggal 25 – 28 Desember tahun
2004 (Gambar 8). Lokasi ini merupakan daerah penangkapan sumber daya
demersal yang potensial karena secara ekologis penyebarannya dibatasi oleh
isobath 200 m. Pengumpulan data penunjang (primer, sekunder) dari informasi
nelayan kepulauan Togean dan dari dinas perikanan kabupaten serta propinsi
dilaksanakan pada bulan Pebruari–Maret tahun 2005 dan Januari–Pebruari 2006.
3.2 Desain Survei
Penentuan desain survei merupakan salah satu hal yang sangat penting
dalam penentuan cruise track (trek pelayaran), dimana dalam penentuannya
membutuhkan pertimbangan yang matang agar nantinya survei dapat berjalan
sesuai dengan yang diharapkan. Trek yang digunakan dalam survei ini berbentuk
systematic triangular transect (Gambar 8). Pemilihan trek tersebut dimaksudkan
agar dapat mencakup seluruh perairan Kepulauan Togean.
3.3 Peralatan Penelitian
Peralatan penelitian yang digunakan antara lain :
(1) Perangkat echo sounder bim terbagi :
• Scientific echo sounder SIMRAD EY 500
• Split beam transducer
• Display CRT 14” berwarna resolusi tinggi
• Labtop dan printer
(2) Alat penentu posisi, GPS (Global Positioning System)
(3) Perangkat Oseanografi
• Valeport current meter tipe 308 CTD
• Plankton net, berdiameter 25 cm (# 60μ) dan 45 cm (# 210μ)
• Bonggo net, berdiameter 62 cm (# 500μ)

200200
121.8 122.0 122.2 122.4Bujur Timur
0.6
0.4
0.2Li
ntan
g S
elat
an
26
62
45
1162
43
5171
81
53
41
Gambar 8 Peta lokasi penelitian dan trek survei akustik di perairan sekitar Kepulauan Togean
8
59o bu
0
51
1140
79
80
1785
P.Teloga
P.WaleabahiP.Waleakodi
P.TaloehP.Melingi
P.Langkara
P.T ngkaP.Pangempan
Talatakoh
Batudaka
Benteng
TOGIAN
Palada
1
2
3
4
5 6
7
8
910
11
12
13
14
15
16
17
18
19
20
2122
23
2425
26
2728
29
30
31
32
33
3435
36
37
38
39
40
41
42
4344
45
46
47
48
49
50
51
52
5354
55
56
5758
5960
SKALA 1 : 1 000 000

42
(4) Alat tangkap yang terdiri dari :
• Bottom gillnet; materialnya PA mono No 60, panjang 43,20 m, lebar 2,49
m dan besar # 1,75 inci
• Traps (bubu dasar); material pilah bambu, panjang 1,80 m, lebar 0,90 m,
tinggi 0,80 m dan lebar mulut 0,30 m
• Handline dasar; materialnya PA mono ∅ 8 mm dan 4 mm, pancing No 10
dan pemberat besi 300-500 gram
3.4 Metode Pengambilan Data
3.4.1 Data oseanografi
Pengukuran data oseanografi dilakukan berdasarkan posisi stasiun
pengamatan. Untuk itu, stasiun pengamatan ditetapkan terlebih dahulu.
Pengukuran pola arus (arah dan kecepatan) dilakukan di masing-masing stasiun
yang ditetapkan tadi. Demikian juga, pengukuran dilakukan pada beberapa strata
kedalaman standar, berturut-turut lapisan permukaan (0-5 m), 10 m, 20 m, 30m,
40 m, dan 50 m. Parameter yang diukur meliputi kedalaman perairan, arah dan
kecepatan arus, suhu dan salinitas dengan menggunakan Valeport current meter
tipe 308 CTD. Disamping itu untuk mengukur kecerahan perairan digunakan seici
disc. Sehingga hasil pengukuran tersebut menggambarkan antara lain : pola arus
untuk masing-masing kedalaman, hubungan antara suhu dan kedalaman perairan,
hubungan antara salinitas dan kedalaman, serta dapat menggambarkan kecerahan
perairan untuk masing-masing stasiun pengamatan. Pengambilan sampel fito-
plankton dan zooplankton di masing-masing lokasi, dilakukan dengan
menggunakan plankton net, sedangkan untuk larva/telor (ichtioplankton)
menggunakan larva net (Bonggo net). Data oseanografi ini untuk menggambar-
kan dinamika (bio-ekologi) sumberdaya perikanan demersal.
3.4.2 Data citra satelit
Disamping data oseanografi di atas juga digunakan data dari satelit selama
satu tahun. Data satelit yang dipilih dalam penelitian ini adalah citra satelit Aqua
MODIS (Moderate Resolution Imaging Spectroradiometer) yang bersih dari

43
tutupan awan, dapat dilihat dari citra level 2 klorofil-a pada situs
http://oceancolor.gsfc.nasa.gov. Setelah memilih tanggal data citra yang
diinginkan, data dipesan melalui NASA Goddard Space Flight Center
menggunakan fasilitas internet pada situs http://disc.gsfc.nasa.gov data dengan
pilihan media FTP (File Transfer Protocol) Pull.
3.4.3 Data akustik
Data akustik diperoleh dengan menggunakan echo sounder SIMRAD EY
500 frekuensi 38 KHz yang memiliki kemampuan untuk mengetahui sebaran
densitas ikan secara spasial maupun vertikal. Transduser dengan sistem bim
terbagi (split beam echosounder) dipasang pada sisi kanan luar kapal (system side
mounted) pada kedalaman 1,5 m dari permukaan air. Pengambilan data survei
akustik dilakukan pada tanggal 25 – 28 Desember tahun 2004. Dimana selama
pelayaran data akustik direkam terus menerus. Untuk mengetahui informasi
keberadaan sumber daya perikanan demersal, data dikelompokan dalam back
scattering cross section untuk penentuan target srength (TS) dan data echo
integrator untuk penentuan densitas absolut. Data yang terkumpul dari hasil
akuisisi dianalisis menggunakan software EP – 500 dengan EDSU (elementary
distance sampling unit) sepanjang 0,5 mil. Metode hidroakustik ini digunakan
untuk menentukan penyebaran, densitas dan biomassa sumber daya ikan
demersal. Survei akustik dan oseanografi dilakukan melalui cruise track akustik
dengan pola systematic triangular transect yang diharapkan dapat mewakili
keseluruhan perairan Kepulauan Togean. Grid antara masing-masing leg adalah
0,5 derajat.
3.4.4 Data hasil tangkapan
Data hasil tangkapan diperoleh dari hasil tangkapan nelayan yang
menggunakan alat tangkap jaring insang dasar, pancing ikan dasar dan bubu
diperoleh langsung dari nelayan masing-masing alat tangkap itu sendiri, dari
tempat-tempat pendaratan ikan dan statistik perikanan tangkap dari dinas
perikanan dan kelautan Kabupaten Tojo Una-una. Data hasil tangkapan ini
berguna untuk menganalisis fishing capacity. Pengumpulan data statistik

44
perikanan tidak hanya dibatasi pada produksi ikan itu sendiri tetapi juga pada
jumlah dan ukuran dari armada penangkapan. Disamping itu juga, informasi
tentang lama waktu melaut, jumlah ABK dan jenis alat tangkap yang digunakan.
Ukuran armada penangkap (perahu/kapal) yang dimaksud meliputi pengukuran
dimensi utama dari perahu tersebut yakni L, B, D dari masing-masing perahu
penangkap.
Experimental fishing merupakan suatu metode yang digunakan untuk
memperoleh ikan contoh dalam penelitian ini. Penggunaan metode ini untuk
memperoleh tingkat keefektifan dari ketiga alat tangkap yang umum digunakan
untuk menangkap ikan demersal. Jaring insang dasar (bottom gillnet) merupakan
alat tangkap yang berbentuk empat persegi panjang dimana efektif untuk
menangkap ikan demersal dengan cara terjerat. Operasi penangkapan ikan
dilakukan pada daerah penangkapan yang telah ditentukan sebelumnya, yakni
dengan cara membentangkan jaring pada perairan. Jaring dipasang secara tetap di
atas dasar perairan dengan bantuan pemberat (jangkar) pada kedua ujung tali
pemberat dan pelampung tanda pada tali ris atas. Setelah 4-5 jam jaring terendam
di dalam air, pengangkatan jaring (hauling) dilakukan. Hand lines dalam
pengoperasiannya dapat dilakukan oleh satu orang karena konstruksi alat ini
paling sederhana sehingga mudah dalam mengoperasikan. Pengoperasian hand
line (pancing ikan demersal) dilakukan pada waktu subuh dan sore hari (3-4 jam).
Sebelum ditawurkan pancing diberi umpan terlebih dahulu. Pengoperasian traps
(bubu) dapat dilakukan oleh 2-3 orang dengan tingkat keefektivan yang tinggi
untuk menangkap ikan demersal. Pengoperasian traps (bubu) dilakukan pada
tempat-tempat yang menjadi daerah penangkapan ikan demersal yang berdekatan
dengan wilayah pengoperasian gillnet. Traps diturunkan dengan menggunakan
pemberat dan pada ujung rangkaian traps diberi tali untuk pelampung tanda.
Traps dibenam selama satu malam (10-12 jam) atau paling lama tiga hari
kemudian diangkat (hauling).
Experimental fishing dilakukan sebanyak enam kali dengan jarak waktu
tiga hari sekali pada lokasi-lokasi yang telah ditentukan mengikuti alur survei
akustik. Uji coba dimulai dari bagian utara pulau Togean, antara pulau Togean –
Talatakoh, bagian utara antara pulau Waleakodi – Waleabahi, bagian timur pulau

45
Waleabahi. Selanjutnya uji coba penangkapan dilakukan pada bagian selatan
antara pulau-pulau Waleabahi, Waleakodi dan Talatakoh. Uji coba ini berakhir
pada bagian selatan antara pulau Togean – Talatakoh.
Pengambilan sampel ikan demersal dilakukan dengan menggunakan ketiga
alat tangkap di atas yang dianggap efektif untuk menangkap ikan demersal.
Pengukuran dilakukan pada seluruh ikan contoh, pengukuran distribusi panjang
dilakukan terhadap panjang cagak (forklength) dengan menggunakan kertas ukur
dan papan ukur untuk ikan yang berukuran kecil, sedangkan untuk ikan yang
berukuran besar diukur dengan menggunakan meteran.
Umumnya perairan Indonesia dipengaruhi oleh dua musim yang dominan,
yaitu musim barat (northwest monsoon) dan musim timur (southeast monsoon).
Musim peralihan I terjadi antara musim barat dan musim timur, sedangkan musim
peralihan II terjadi antara musim timur dan musim barat. Adanya musim timur
dan musim barat, serta musim peralihannya merupakan fenomena yang tidak
terpisahkan dari kondisi laut dan segala aktivitas ikan, termasuk perilaku
pengelompokan dan pola ruaya beberapa jenis ikan dan udang, sehingga
mempengaruhi kegiatan penangkapan yang berdampak pada hasil tangkapan yang
diperoleh.
3.5 Analisis Data
3.5.1 Analisis oseanografi
Sampling oseanografi dilaksanakan untuk mempelajari dinamika masa air
(fisik) dan karakteristik biologi perairan. Data suhu, salinitas dan kedalaman yang
diperoleh diolah dan dianalisis dengan menggunakan personal computer dan
beberapa software pendukung. Data yang diperoleh dari current meter setelah di
down-load ke komputer kemudian dianalisis dengan menggunakan software
datalog lalu disimpan dalam bentuk excel. Data oseanografi digambarkan dalam
bentuk sebaran menegak, horisontal dan melintang untuk menggambarkan profil
masa air daerah penelitian. Analisis dan ekplorasi data dilaksanakan dengan
perangkat lunak Surfer dan Excel.

46
3.5.2 Analisis citra satelit
Data MODIS yang sudah diterima dari NASA diolah dengan
menggunakan perangkat lunak SeaDAS 4.7 under LINUX. Proses analisis citra
Aqua MODIS dilakukan dengan urutan sebagai berikut :
(1) Analisis citra level 1 menjadi level 2
Untuk menganalisis data level 1 menjadi level 2 digunakan program msl 12,4
(SeaDAS MODIS Aqua L2 file generation) yang terdapat pada menu SeaDAS.
Citra level 1 merupakan suatu file yang masih dalam format MOD atau MYD,
kemudian dilakukan proses kalibrasi, koreksi atmosferik dan penerapan algoritma
untuk menghasilkan level 2 disimpan dalam format HDF. Menurut McClain and
Feldman (2004), algoritma OC3M digunakan sebagai standar dalam analisis citra
satelit Aqua Modis untuk mendapatkan data klorofil-a perairan secara global.
Persamaan algoritma OC3M (O’Reilly et al. 2000) yaitu :
2 3 40,283 2,753 1,457 0,659 1,40310
443 48810 , log551
R R R R rs rs
rs
R RCa RR
− + + − ⎛ ⎞>= = ⎜ ⎟
⎝ ⎠…………(1)
Ca, konsentrasi klorofil-a (mg/m3) ; R, rasio refleksi ; Rrs, remote sensing
reflectance.
Untuk menduga suhu permukaan laut dipakai algoritma MODIS yang
menggunakan kanal 31 dan 32 sebagai berikut :
1 2 31 3 31 32 4 31 32_ * * *(sec 1)Modis SST C C T C T C T*θ− −= + + + − ...................(2)
T31, T32, brightness temperatur dari kanal 31 dan 32 ; θ, sudut senit satelit,
sedangkan kostanta C1, C2, C3 dan C4 dapat dilihat pada Tabel 4.
Tabel 4 Koefisien kanal 31 dan 32 untuk Aqua MODIS
Koefisien T31 – T32 ≤ 0,7 T31 – T32 > 0,7
C1 1,11071 1,196099
C2 0,9586865 0,9888366
C3 0,1741229 0,1300626
C4 1,876752 1,627125
(2) Koreksi geometrik
Setelah melakukan proses level 1 menjadi level 2, kemudian dilakukan
proses koreksi geometrik melalaui Seadisp (seawifs display). Koreksi geometrik

47
yang dilakukan adalah melakukan proyeksi citra. Proyeksi citra dilakukan pada
program projection untuk menghilangkan sudut elevasi satelit sehingga citra yang
ditampilkan menjadi datar. Proyeksi yang digunakan pada penelitian ini adalah
mercator, proyeksi ini mempertahankan arah dan sudut.
(3) Pemotongan citra (cropping)
Untuk melakukan cropping atau pemotongan citra sesuai dengan daerah
yang diinginkan, dilakukan pada program projection. Dalam pemotongan citra,
catat pixel/line awal dan akhir serta nilai lintang/bujur awal dan akhir. Supaya
citra ini lebih informatif maka dilakukan perbaikan tampilan citra antara lain :
landmask, skala warna dan garis pantai menggunakan menu Seadisp (general
image and graphics display).
3.5.3 Analisis stok ikan dengan hidroakustik
Langkah pertama pengolahan data akustik yang diperoleh dari scientific
echosounder SIMRAD EY 500 adalah merubah raw data dalam bentuk datagram
(DG) menjadi dalam bentuk data terkompres (datathreshold/DT) dengan
menggunakan perangkat lunak EP500. Pada menu analysis bottom layer, data
yang dibagi menjadi beberapa segmen dan kedalaman selanjutnya data disimpan
dalam format ASCII dengan ext *.csv. data tarsebut berupa Matriks Data Akustik
(MDA) ikan demersal, matriks data target strength (TS) dan matriks data back-
scattering volume (Sv). Setelah data tersimpan dalam format ASCII, pengolahan
data dilanjutkan pada spread sheet excel. Nilai target strength yang didapat dari
TS distribution dirata-ratakan pada setiap ESDU (elementary sampling distance
unit) kemudian ditampilkan dalam bentuk grafik untuk melihat penyebaran target
strength secara vertikal dan kontur secara horizontal. Johannesson and Mitson
(1983) mendefinisikan target strength sebagai logaritma hasil bagi antara nilai
intensitas suara yang mengenai target dan dikalikan dengan bilangan sepuluh.
Dengan demikian target strength dapat dirumuskan seperti berikut (Urick 1983)
TS = 10 log σ/4π ................................................ (3)
Back scattering cross section dapat juga digambarkan dalam satuan
decibels (dB) sehingga nilai back scattering cross section adalah σ/4π, dimana
acoustic cross-section (σ) merupakan luas bidang penerima sejumlah energi dari

48
target yang memantulkan gema. Dengan demikian persamaan TS dapat dituliskan
sebagai berikut :
TS = 10 log σbs ................................................ (4)
Pada aplikasi perhitungan kelimpahan telah banyak dimanfaatkan rumusan
yang dikemukakan oleh Foote (1987) yang menjelaskan hubungan antara target
strength dengan ukuran panjang ikan yang diformulasikan sebagai berikut.
Untuk target dengan gelembung renang tertutup (physoclist),
TS = 20 log (L) – 67,5 dB .................................................. (5)
dimana L adalah panjang strandar ikan (fork length) dalam cm. Untuk target
dengan gelembung renang terbuka (physostome),
TS = 20 log (L) – 71,9 dB …............................................. (6)
sedangkan untuk bladderless fish (tanpa gelembung renang)
TS = 20 log (L) – 80 dB ................................................ (7)
Metode echo intergation (integrasi gema) digunakan untuk mengintegrasi
densitas ikan, dimana gema dari target ganda menjadi overlap dan ikan tunggal
sulit dipisahkan. Integrasi gema berguna untuk mengubah energi total dari gema
ikan menjadi densitas ikan dalam satuan fish/m3 atau kg/m3. Pendugaan nilai
densitas dihitung dari nilai SA yang merupakan nilai integrasi gema.
Untuk mendapatkan niali SA (Scattering Area) diperoleh dari persamaan
berikut :
................................................. (8) 22
1
2 )/1852(.4 nmmdrSvRSR
RA ⎥
⎦
⎤⎢⎣
⎡= ∫π
Untuk mendapatkan nilai Sv (Scattering volume) yang merupakan nilai dari
intensitas suara yang mengenai target pada volume air tertentu (m3) didapat dari
persamaan berikut ini :
)()/1852(4 12
22 RRnmmRSSv A
−=
π ............................................... (9)
R, jarak referensi (1 m); (R2-R1), tinggi lapisan perairan yang dianalisis.
Sehingga nilai densitas berdasarkan areanya adalah :
bs
AA
Sσ
ρ = ................................................ (10)

49
ρA, densitas ikan per luasan perairan pada kolom air tertentu ; SA, nilai back
scattering area ; σbs, nilai back scattering cross section
Nilai σbs adalah sebagai berikut : σbs = 1010TS
................................................ (11)
Persamaan densitas untuk berat target strength normal ikan demersal pada 38
kHz adalah Coetzee (2000):
30.1 / 2( . ) *1000
(4 .10 .1852 . )A
TS kgSDensitas g m
Rπ− ⎡
= ⎢ Δ⎣ ⎦
⎤⎥
⎤⎦
}Δ
................................ (12)
(log 67.5) /2( . ) 10 *100AS TS kgDensitas g m − −− ⎡= ⎣ ............................................ (13)
Menurut Maclennan and Simmonds (1992) dan Effendie (2002) konversi
panjang ikan dugaan menjadi berat dugaan dilakukan dengan persamaan yang
menjelaskan hubungan panjang berat dari spesies ikan yang akan diestimasi
yaitu :
.............................................. (14) bW aL=
W, berat ikan ; L, panjang ikan ; a dan b, konstanta untuk spesies tertentu
Selanjutnya karena bentuk persamaan target strength adalah persamaan
logaritmik dan persamaan panjang-berat bukan merupakan persamaan yang linier
maka persamaan panjang-berat yang digunakan untuk mengkonversi panjang
dugaan menjadi berat dugaan menjadi seperti berikut :
{ } {1 1
1
( / 2) ( ) / ( 1)i
b bWt a ni Li L Li L b L+ +⎧ ⎫= + Δ − −Δ +⎨ ⎬
⎩ ⎭∑ ................... (15)
Wt, berat total ; a dan b, konstanta untuk spesies tertentu ; ni, jumlah individu
pada kelas i ; Li, nilai tengah dari kelas panjang i ; ΔL, selang kelas panjang. Hasil
tersebut divalidasi dengan parameter biologi jenis yang dominan untuk menduga
densitas biomassa.
3.5.4 Analisis fishing capacity
Pada dasarnya ada berbagai metode yang dapat digunakan untuk
menganalisis fishing capacity. Greboval (2003) mencatat bahwa Technical
Working Group (TWG) on the Management of Fishing capacity mere-

50
komendasikan dua alternatif pendekatan untuk pengukuran fishing capacity yaitu
peak to peak analysis dan data envelopment analysis (DEA). Pendekatan DEA
menurut Fauzi dan Anna (2005) merupakan pendekatan non parametrik yang
dapat diandalkan untuk aplikasi yang luas dan mudah dilakukan berkaitan dengan
definisi ekonomi dan teknologi yang terfokus pada kapasitas output, serta tidak
membutuhkan data yang mahal. Metode DEA menurut Coelli et al. (1998) adalah
analisis program matematik untuk mengestimasi efisiensi teknis dari kegiatan
produksi. Fauzi dan Anna (2005) malaporkan bahwa analisis ini digunakan untuk
mengestimasi kapasitas yang menggunakan model cross section dengan multi
input dan multi output. Unit observasi adalah kapal perikanan dan input serta
output berdasarkan data bulanan per unit kapal. Orientasi pendekatan ini pada
input dan output perikanan sebagaimana yang disarankan oleh Kirkley dan
Squires (1998) yang kemudian dikembangkan lebih lanjut oleh Fare et al. (2000).
Selain pendekatan ini terdapat juga beberapa metode yang digunakan untuk
pengukuran fishing capacity. Beberapa diantaranya dilakukan oleh Newton
(1999) dan Fitzpatrick (1996) yang melakukan analisis fishing capacity dengan
pendekatan koefisien teknologi; Pella dan Psaropulos (1975) melakukan
perhitungan matematik dengan pendekatan pendugaan CPUE yang distandarisasi;
dengan menggunakan metode Virtual Population Analysis (VPA) dan General
Linear Modeling (GLM), Gascuel et al. (1993) melakukan pengukuran fishing
capacity dengan pendekatan fishing power.
Data Envelopment Analysis adalah analisis program matematik untuk
mengestimasi efisiensi teknis kegiatan produksi secara simultan. Analisis tersebut
menggunakan model panel data dengan multi input dan single output. Unit
observasi adalah kapal perikanan dan input serta output berdasarkan data bulanan
per unit kapal.
Fauzi (2005) menyatakan bahwa dalam konteks industri penangkapan,
diasumsikan bahwa teknologi yang berlaku berdifat decreasing return to scale
(DRS). Selanjutnya dinyatakan pula bahwa model DEA memiliki kelebihan dan
keterbatasan. Kelebihan dalam hal kemampuan untuk mengestimasi kapasitas di
bawah kendala penerapan kebijakan tertentu. Kelebihan lainnya adalah kemam-
puannya dalam mengakomodasi multiple outputs dan multiple inputs, dapat

51
menentukan tingkat potensial maksimum dari effort atau variabel input secara
umum dan laju utilitas optimal. Keterbatasan berupa kesulitan mementukan
pembobotan yang seimbang antara input dan output. Selain itu, pendekatan DEA
mengalami kesulitan dalam uji hipotesis statistik.
Pendekatan DEA yang digunakan dalam penelitian ini yaitu minimisasi
input (input oriented) dan maksimisasi output (output oriented). Pendekatan ini
digunakan untuk mengukur seberapa besar output yang dihasilkan oleh sejumlah
masing-masing alat tangkap tanpa ada pengurangan dan seberapa besar input
(effort) yang harus dikurangi tanpa ada perubahan jumlah output (hasil
tangkapan). Untuk menduga efisiensi teknis dari upaya penangkapan selama 8
tahun terakhir 1998-2005 (jangka panjang) menggunakan pendekatan minimisasi
input dengan asumsi terdapat J upaya (trip), dimana j = 1, 2, ...J; j = 8) sebagai
input dengan 1 output berupa hasil tangkapan dengan menggunakan asumsi model
constant return to scale (CRS) dengan formula (Kirkley dan Squires 1999) :
.............................................. (16)
1
1
1
,
1
ˆ,
ˆ0, 0
J
j jn jnj
J
jj
J
j jn j jnj
j jn
z x x n
z
z x x n
z n
α
λ α
λ α
=
=
=
≤ ∈
=
= ∈
≥ ≥ ∀ ∈
∑
∑
∑
Dimana j = 1,2, ...., J adalah tahun diobservasi sebagai decision making units.
Dengan demikian terdapat 8 tahun observasi atau J=8 dan n= 1,2,..., n input (n=1).
Keterangan : TE, efisiensi teknis untuk tahun ke j ; θ , nilai pengukuran untuk
setiap observasi (≥1) ; uj , output untuk tahun ke-j yaitu 1 output (hasil tangkapan)
; xjn, input ke-n yang digunakan, terdiri dari 1 input tetap (jumlah upaya masing-
masing alat tangkap) ; λj, tingkat penggunaaan input variabel ke-n ; zj, intensitas
penggunaan variabel.
1
J
j j jj
TE Max
u z uθ=
=
≤∑
θ

52
Untuk menduga efisiensi teknis dari masing-masing alat tangkap dan
efisiensi teknis saat ini dari setiap kapal (jangka pendek) menggunakan
pendekatan maksimisasi output (output oriented), hal ini untuk mengetahui jenis
alat tangkap mana yang paling efisien (diasumsikan terdapat J jenis alat tangkap,
dimana j = 1,2,...J) sebagai input (effort, alat tangkap) dengan 1 output berupa
hasil tangkapan. Untuk efisiensi dalam jangka pendek, dilakukan dengan
membandingkan efisiensi antar kapal. Pada analisis ini yang menjadi decision
making units (DMU)-nya adalah kapal/perahu jaring insang dasar dengan variabel
inputnya adalah lama waktu penangkapan, jumlah trip per bulan, ukuran kapal
(GT) dan biaya operasional. Variabel output yang digunakan adalah hasil
tangkapan (catch) dan keuntungan dengan menggunakan asumsi model variable
return to scale (VRS) yang diformulasikan
.............................................. (17) J
u z1
j j jj
TE Max
u m
θ
=
=
≤ ∀∑ θ
Dimana j = 1,2, ...., J adalah jumlah kapal/perahu yang diobservasi sebagai
decision making units. Dengan demikian terdapat 30 jaring insang dasar, 8 rawai
tetap, 8 bubu dan 55 pancing dasar yang diobservasi.
1
1
1
,
1
ˆ,
0, 0, 1, 2,..., , 1, 2,...,
J
j jn jnj
J
jj
J
j jn j jnj
j jn
z x x n
z
z x x n
z j J n
α
λ α
λ
=
=
=
≤ ∈
=
= ∈
≥ ≥ = =
∑
∑
∑N
Keterangan : TE, efisiensi teknis untuk tahun ke j ; θ , nilai pengukuran untuk setiap observasi
(≥1) ; uj , output untuk tahun ke-j yaitu 2 output (hasil tangkapan dan biaya
operasional) ; xjn, input ke-n yang digunakan, terdiri dari 1 input tetap (jumlah
upaya masing-masing alat tangkap, n = 4) ; λj, tingkat penggunaaan input variabel
ke-n ; zj, intensitas penggunaan variabel.