Embed Size (px)
Citation preview

ANALISIS KESTABILAN MANGSA PEMANGSA
DI LINGKUNGAN BERACUN
SKRIPSI
Putri Sindangsari Kinasih
1113094000019
PROGRAM STUDI MATEMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UIN SYARIF HIDAYATULLAH JAKARTA
2020 M / 1441 H

ANALISIS KESTABILAN MANGSA PEMANGSA
DI LINGKUNGAN BERACUN
Skripsi
Diajukan kepada
Universitas Islam Negri Syarif Hidayatullah Jakarta
Fakultas Sains dan Teknologi
Untuk Memenuhi Salah Satu Persyaratan dalam
Memperoleh Gelar Sarjana Matematika (S.Mat)
Oleh:
Putri Sindangsari Kinasih
1113094000019
PROGRAM STUDI MATEMATIKA
FAKULTAS SAINS DAN TEKNOLOGI
UIN SYARIF HIDAYATULLAH JAKARTA
2020 M / 1441 H

ii
PERNYATAAN

iii
LEMBAR PENGESAHAN

iv
PERSEMBAHAN
Skripsi ini ku persembahkan untuk orang tuaku tercinta yang selalu
menyayangiku
(Alm)Bapak Ronin Hidayat dan Ibu Siti Afifah

v
MOTTO
ل تحزن ان الل معنا
(QS At-Taubah 9:40)

vi
KATA PENGANTAR
Alhamdulillah, puji syukur saya panjatkan kepada Allah SWT atas segala
limpahan rahmat dan karunia-Nya sehingga penulis dapat menyelesaikan skripsi
yang berjudul “Analisis Kestabilan Mangsa Pemangsa di Lingkungan
Beracun”. Tak lupa shalawat serta salam senantiasa tercurah kepada Nabi
Muhammad SAW beserta keluarganya, para sahabat, serta para pengikutnya yang
selalu istiqomah sampai akhir zaman.
Penulis menyadari bahwa skripsi ini dapat diselesaikan karena dukungan
dan bantuan dari beberapa pihak. Untuk itu, pada kesempatan ini penulis
mengucapkan banyak terima kasih kepada berbagai pihak yang telah ikut andil
dalam penyelesaian skripsi ini, khususnya kepada :
1. Ibu Prof. Dr. Lily Surayya Eka Putri, M.Env.Stud, sebagai Dekan Fakultas
Sains dan Teknologi Universitas Islam Negeri Syarif Hidayatullah Jakarta.
2. IbuDr.Suma’inna,M.Si,sebagaiketuaprogramstudiMatematikaFakultas
Sains dan Teknologi UIN Syarif Hidayatullah Jakarta.
3. Ibu Irma Fauziah, M.Sc, sebagai Sekretaris Program Studi Matematika
Fakultas Sains dan Teknologi UIN Jakarta dan sebagai motivator penulis
dalam menyelesaikan skripsi ini.
4. Ibu Irma Fauziah, M.Sc, selaku Pembimbing I yang telah memberikan ilmu
pengetahuan, pengarahan, bimbingan, inspirasi dan motivasi, waktu,
tenaga, serta pikirannya untuk membantu penulis dalam menyelesaikan
skripsi ini.
5. Bapak Muhamad Manaqib,M.Sc, selaku Pembimbing II yang telah
memberikan ilmu pengetahuan, pengarahan, bimbingan, inspirasi dan
motivasi, waktu, tenaga, serta pikirannya untuk membantu penulis dalam
menyelesaikan skripsi ini.

vii
6. Ibu Yanne Irene,M.Si, selaku Penguji I dan Bapak Muhaza Liebenlito, M.Si
selaku Penguji II yang telah memberikan masukan dan saran yang
membangun dalam menyelesaikan skripsi ini.
7. Segenap ibu dan bapak dosen Program Studi Matematika yang telah
memberikan ilmu dan pengalaman kepada penulis selama masa studi.
8. Kedua orang tua penulis, (Alm) Bapak Ronin Hidayat dan Ibu Siti Afifah
yang tak pernah berhenti memberikan cinta dan kasih sayang. Penulis
ucapkan banyak terima kasih atas semangat dan dukungan baik moril
ataupun materil. Sungguh, gelar ini saya persembahkan untuk kalian yang
amat saya sayangi.
9. Keluarga penulis Mba Khapsoh, Mba Ayu, (Alm) Mba Cika dan Ayi, yang
juga selalu mendampingi, mendoakan dan memberikan motivasi penulis
untuk segera menyelesaikan skripsi ini.
10. Teman-teman baik penulis saat kuliah Elly Nurmaidah, Ainul Munawaroh,
Ilva Mediana, dan khususnya untuk Mulyanah dan Rafika Puspa Wardana
teman seperjuangan menyelesaikan tugas akhir, terimakasih atas doa,
motivasi dan bantuan yang telah diberikan sehingga penulis dapat
meyelesaikan skripsi ini.
11. Teman-teman Himatika tekhusus angkatan 2013 a.k.a Cypress Family.
12. Serta seluruh pihak yang tidak bisa disebutkan satu persatu, semoga bantuan
dan dukungan yang telah diberikan kepada penulis dapat dibalas oleh Allah
SWT.
Akhir kata semoga tulisan ini dapat bermanfaat banyak bagi penulis lain
khususnya dan bagi semua pembaca pada umumnya.
Jakarta, April 2020
Penulis
Putri Sindangsari Kinasih

viii
LEMBAR PERNYATAAN PERSETUJUAN

ix
ABSTRAK
Putri Sindangsari Kinasih, Analisis Kestabilan Mangsa Pemangsa Di Lingkungan
Beracun. Dibawah bimbingan Irma Fauziah,M.Sc dan Muhamad
Manaqib,M.Sc
Musuh alami merupakan hal terpenting dalam siklus rantai makanan, musuh alami
juga sangat dibutuhkan dalam dunia pertanian, yaitu dalam hal mengendalikan
jumlah populasi hama. Dalam tulisan ini, dibentuk suatu model mangsa pemangsa
pada lingkungan yang beracun. Model matematika terdiri atas empat komponen
spesies yakni populasi hama wereng (mangsa), populasi kumbang (pemangsa),
konsentrasi racun pada organisme, dan konsentrasi racun pada lingkungan.
Menggunakan fungsi Holling Tipe II setelah di bentuk sistem persamaan
diferensialnya kemudian mencari titik ekuilibrium dan menganalisis kestabilan
titik-titiknya. Hasilnya diperoleh 4 titik ekuilibrium yang selanjutnya titik – titik
tersebut dianalisis syarat-syarat nilai parameternya untuk mencapai titik
ekuilibrium yang stabil.
Kata kunci: Mangsa Pemangsa, Fungsi Respons Holling II, Fungsi Logistik
Lingkungan Beracun.

x
ABSTRACT
Putri Sindangsari Kinasih, Stability Analysis of Predator Prey in Toxic
Environments. Under the guidance of Irma Fauziah, M.Sc and Muhamad
Manaqib, M.Sc
Natural enemies are the most important thing in the food chain cycle, natural
enemies are also very needed in agriculture, namely in terms of controlling the
population of pests. In this paper, a predator model is formed in a toxic
environment. The mathematical model consists of four species components namely
population of plant hopper (prey), beetle population (predator), concentration of
poison in organisms, and concentration of poison in the environment. Using the
Holling Type II function after a differential equation system is formed, it then looks
for equilibrium points and analyzes the stability of the points. The result is obtained
4 equilibrium points which then these points are analyzed the conditions of the
parameter values to reach a stable equilibrium point.
Keywords: Predator Prey, Holling II Response Function, Logistics Function, Toxic
Environment.

xi
DAFTAR ISI
HALAMAN JUDUL……………………………………………….…………….ii
PERNYATAAN .................................................................................................... ii
LEMBAR PENGESAHAN ................................................................................. iii
PERSEMBAHAN ................................................................................................ iv
MOTTO ................................................................................................................. v
KATA PENGANTAR .......................................................................................... vi
LEMBAR PERNYATAAN PERSETUJUAN ................................................. viii
ABSTRAK ............................................................................................................ ix
ABSTRACT ........................................................................................................... x
DAFTAR ISI ........................................................................................................ xi
DAFTAR LAMBANG ....................................................................................... xiii
BAB I PENDAHULUAN ...................................................................................... 1
1.1 Latar Belakang Masalah.......................................................................................... 1
1.2 Perumusan Masalah ................................................................................................ 3
1.3 Tujuan Penellitian ................................................................................................... 3
1.4 Batasan masalah ...................................................................................................... 3
1.5 Maanfaat penelitian ................................................................................................. 3
BAB II DASAR TEORI ....................................................................................... 4
2.1 Nilai Eigen dan Vektor Eigen ................................................................................. 4
2.2 Persamaan Diferensial............................................................................................. 4
2.3 Sistem Persamaan Diferensial Linier ...................................................................... 5
2.4 Sistem Persamaan Diferensial Nonlinear ................................................................ 7
2.5 Titik ekuilibrium ..................................................................................................... 7
2.6 Kestabilan Sistem Persamaan Diferensial Non Linear ........................................... 8
2.7 Model Mangsa Pemangsa ..................................................................................... 10
2.8 Fungsi Respons Holling ........................................................................................ 11
2.9 Model Pertumbuhan Logistik ................................................................................ 13

xii
BAB III MODEL MATEMATIKA MANGSA PEMANGSA DI
LINGKUNGAN BERACUN .............................................................................. 14
3.1 Asumsi Model ....................................................................................................... 14
3.2 Variabel Dan Parameter ........................................................................................ 14
3.3 Titik Ekuilibrium Model ....................................................................................... 20
BAB IV ANALISIS KESTABILAN MODEL MANGSA PEMANGSA DI
LINGKUNGAN BERACUN .............................................................................. 24
4.1 Analisis Kestabilan Titik Ekuilibrium .................................................................. 24
4.1.1 Analisis Kestabilan Titik Ekuilibrium 𝑻𝑬𝟏(𝟎, 𝟎, 𝒗∗, 𝒔∗) .................................. 27
4.1.2 Analisis Kestabilan Titik Ekuilibrium 𝑻𝑬𝟐(𝟎, 𝒚∗, 𝒗∗, 𝒔∗)................................. 28
4.1.3 Analisis Kestabilan Titik Ekuilibrium 𝑻𝑬𝟑(��, ��, 𝒗∗, 𝒔∗) .................................. 30
4.1.4 Analsisi Kestabilan Titik Ekuilibrium𝑻𝑬𝟒(��, 𝟎, 𝒗∗, 𝒔∗) ................................... 32
BAB V PENUTUP .............................................................................................. 34
5.1 Kesimpulan ........................................................................................................... 34
5.2 Saran ..................................................................................................................... 35
DAFTAR PUSTAKA .......................................................................................... 35
LAMPIRAN ........................................................................................................ 37

xiii
DAFTAR LAMBANG
𝑋(𝑡) : Jumlah individu populasi mangsa pada waktu ke - 𝑡
𝑌(𝑡) : Jumlah individu populasi pemangsa pada waktu ke - 𝑡
𝑆(𝑡) : Konsentrasi racun pada organisme pada waktu ke - 𝑡
𝑉(𝑡) : Konsentrasi racun pada lingkungan pada waktu ke – 𝑡
𝑟 : Tingkat pertumbuhan relatif mangsa
𝐾 : Daya dukung lingkungan pada populasi mangsa
𝑟𝑦 : Tingkat pertumbuhan relatif pemangsa
𝐾𝑦 : Daya dukung lingkungan pada populasi pemangsa
𝛼 : Tingkat pencarian dan penangkapan mangsa oleh pemangsa
ℎ : Tingkat penangkapan dan pencernaan pemangsa
𝑀 : Laju kematian alami pada populasi mangsa
𝑈 : Laju kematian alami pada populasi pemangsa
𝑄 : Tingkat konsentrasi racun pada lingkungan
𝜌1 :Tingkat kematian populasi mangsa akibat menyerap racun pada
lingkungan
𝑒 : Pengubahan konsumsi mangsa ke dalam kelahiran pemangsa
𝜌2 :Tingkat kematian populasi pemangsa akibat menyerap racun pada
lingkungan
𝛾 : Konsentrasi racun pada lingkungan yang hilang akibat terserap mangsa
dan pemangsa
𝜇 : Konsentrasi racun pada lingkungan yang hilang secara alami
𝑏 : Laju penambahan racun dari proses memakan makanan
𝜃 : Tingkat hilangnya konsentrasi racun setelah memakan makanan secara
alami

xiv

1
BAB I
PENDAHULUAN
1.1 Latar Belakang Masalah
اظ الب حربم و الف س ادفىالب ر ه ر الذيع ملوال ع لهمي رجعون ٤١-ك س ب تا يدىالناسليذيق همب عض
Telah tampak kerusakan di darat dan di laut disebabkan karena perbuatan tangan
manusia; Allah menghendaki agar mereka merasakan sebagian dari (akibat)
perbuatan mereka, agar mereka kembali (ke jalan yang benar). (QS. Ar-Rum
30:41)
Dalam hal proses ekologis, predasi adalah salah satu kemungkinan bentuk
transfer energi dari hewan hidup ke hewan hidup yang lain. Dalam hal perilaku,
predasi adalah proses di mana seekor binatang (pemangsa) menangkap dan
membunuh binatang lain (mangsa) sebelum memakan mangsanya sebagian atau
seutuhnya [1]
Perlakuan teoretis definitif pertama mengenai dinamika populasi terdapat pada
Essay on the Principle of Population karya Thomas Malthus (1798), Malthus
berpendapat bahwa walaupun populasi bertumbuh secara logaritma, sumber daya
alam yang menjadi sumber kehidupan mereka, tetap konstan atau hanya bertambah
secara aritmatika. Dengan demikian, tuntutan untuk sumber daya alam pada
akhirnya akan melampaui suplai dan pertumbuhan populasi, karena bergantung
pada suplai sumber daya alam akan berhenti. Kemudian, Verhulst (1838)
mengubah “prinsip populasi” menjadi model matematika, berupa persamaan
logistik. Elements of Physical Biology oleh Lotka (1925) adalah kemajuan
berikutnya dalam teori dinamika populasi. Lotka tidak hanya menurunkan
persamaan logistik yang dia sebut sebagai “hukum pertumbuhan populasi” dari
prinsip pertama, tapi dia juga mengajukan model interaksi tropik (pemangsa-
mangsa) pertama. Namun, bukannya mengembangkan model pemangsa-mangsa
dengan mengembangkan “hukum” logistikmenjadi dua spesies, Lotka, dan tak

2
lama setelah itu, Volterra (1928), mengadopsi prinsip kimia mengenai tindakan
massal. Dengan kata lain, dia berasumsi bahwa respos populasi akan proposional
dengan produk dari kepadatan biomassa mereka. Kontribusi utama lainnya pada
teori interaksi pemangsa dan mangsa adalah penambahan fungsi respons pemangsa.
Solomon (1949) dan Holling (1959, 1966) berpendapat bahwa, karena pemangsa
hanya dapat menghadapi sejumlah mangsa terbatas pada satu unit waktu, tingkat
kematian mangsa harus merupakan fungsi nonlinear dari kepadatan mangsa [2].
Wereng cokelat (Nilaparvata Lugens stål ) merupakan salah satu hama yang
paling banyak merusak tanaman padi dan merugikan petani. Menurut Baehaki [3]
hama wereng cokelat di samping merusak langsung dengan mengisap cairan sel
tanaman, hama wereng juga sebagai vektor penularan penyakit virus kerdil hampa,
virus kerdil rumput tipe I, virus kerdil rumput tipe II. Salah satu cara yang ditempuh
untuk membasmi hama ini adalah dengan penggunaan pestisida. Namun
penggunaan pestisida sering kali memnyebabkan kematian musuh alami hama
wereng salah satu musuh alaminya yaitu kumbang (Menochilus Sexmaculatus)
Studi tentang mangsa pemangsa telah banyak dipelajari dan dikembangkan.
Berberapa diantaranya mengenai mangsa pemangsa di lingkungan beracun seperti
yang telah dibahas oleh Q.Huang dkk [4] tentang dampak racun lingkungan
terhadap dinamika mangsa pemangsa, Sinha dkk [5] meneliti dengan asumsi
pertumbuhan mangsa dan pemangsa mengikuti pertumbuhan logistik dan infeksi
pada mangsa dipengaruhi dari lingkungan dengan pola SIS (susceptible, infectible,
susceptible) juga penelitian oleh Irham [6],[7] dengan populasi berupa satu mangsa
dan dua pemangsa.
Berdasarkan uraian tersebut, penulis bermaksud melakukan penelitian serupa
namun membahas tentang interaksi mangsa pemangsa di lingkungan yang beracun
dengan satu mangsa dan satu pemangsa . Penelitian ini bertujuan untuk membentuk
model matematika yang bisa dijadikan alat untuk mengetahui proses dinamika
antara pemangsa dan mangsa serta menganalisa penyebaran hama pada waktu
tertentu.

3
1.2 Perumusan Masalah
Rumusan masalah pada penelitian ini adalah sebagai berikut:
1. Bagaimana membentuk model mangsa pemangsa dengan satu mangsa dan
satu pemangsa di lingkungsn beracun?
2. Bagaimana menyelidiki kestabilan titik ekuilibrium model tersebut?
1.3 Tujuan Penellitian
Adapun tujuan penelitian ini yaitu:
1. Mengkaji model satu mangsa pemangsa di lingkungan beracun
2. Menyelidiki kestabilan titik ekuilibrium model mangsa pemangsa di
lingkungan beracun
1.4 Batasan masalah
Pada penelitian ini hanya menganalisis model mangsa pemangsa lingkungan yang
beracun dengan satu mangsa dan satu pemangsa dengan menggunakan fungsi
Holling tipe II dan fungsi logistic.
1.5 Maanfaat penelitian
Penelitian ini diharapkan mampu dijadikan referensi untuk penelitian mengenai
model mangsa pemangsa di lingkungan beracun. Hasil dari penelitian ini semoga
bisa dikembangkan dalam penelitian selanjutnya dengan menambahkan beberapa
data atau metode lainnya

4
BAB II
DASAR TEORI
2.1 Nilai Eigen dan Vektor Eigen
Definisi 2.1[8]
Jika 𝐴 adalah sebuah matriks 𝑛 × 𝑛, maka sebuah vector taknol 𝑥 pada 𝑅𝑛 disebut
vector eigen dari 𝐴 jika 𝐴𝑥 adalah sebuah kelipatan skala dari 𝑥; jelasnya
𝐴𝑥 = 𝜆𝑥
untuk skalar sebarang 𝜆. Skalar 𝜆 disebut nilai eigen dari 𝐴, dan 𝑥 disebut sebagai
vector eigen dari 𝐴 yang terkait dengan 𝜆 .
Untuk memperoleh nilai eigen dari sebuah matriks 𝐴, 𝑛 × 𝑛, persamaan 𝐴x =
λx dituliskan kembali sebagai
𝐴x = λIx
atau secara ekuivalen,
(λI − 𝐴)x = 0 (2. 1)
Agar 𝜆 dapat menjadi nilai eigen, harus terdapat solusi taknol. Persamaan (2.1)
memiliki solusi taknol jika dan hanya jika
det(λI − 𝐴) = 0 (2. 2)
Persamaan (2.2) disebut persamaan karakteristik matriks 𝐴. Skalar – scalar
yang memenuhi persamaaan ini adalah nilai-nilai eigen 𝐴. Apabila diperluas lagi,
determinan det(λI − 𝐴) adalah sebuah polinomial 𝑝 dalam variable 𝜆 yang disebut
sebagai polinomial karakteristik matriks 𝐴.
2.2 Persamaan Diferensial
Persamaan Diferensial adalah suatu persamaan yang memuat suatu turunan atau
lebih pada suatu fungsi. Sebuah persamaan differensial dikatakan persamaan

5
diferensial biasa jika semua turunannya terlibat oleh satu variable bebas. Dan
disebut persamaan diferensial parsial jika terdapat suatu turunan terlibat dengan dua
atau lebih variable bebas[9]
Order pada persamaan differensial adalah turunan tertinggi yang terjadi di
dalam suatu persamaan . Urutan persamaan diferensial adalah sama dengan jumlah
konstanta yang terdapat dalam solusi umumnya [10]
Contoh Persamaan differensial orde 1
𝑑𝑦
𝑑𝑡− 𝑦 = 0
yang mempunyai solusi umum 𝑦 = 𝐶1𝑒𝑡 yang terdapat hanya 1 constanta acak 𝐶1.
Sedangkan contoh persamaan differensial orde kedua
𝑑2𝑦
𝑑𝑡2− 𝑦 = 0
adalah persamaan differensial order 2 yang solusi umumnya adalah 𝑦 =
𝐶1 cosh 𝑡 + 𝐶2 sinh 𝑡 yang memuat 2 konstanta acak
2.3 Sistem Persamaan Diferensial Linier
Sistem persamaan diferensial orde satu dengan 𝑛 persamaan dan 𝑛 buah fungsi
yang tidak diketahui 𝑥1, 𝑥2, … , 𝑥𝑛 dapat ditulis sebagai
��(𝑡) = 𝑓(𝑥(𝑡), 𝑡) (2. 3)
dengan
𝑥 = (𝑥1⋮𝑥𝑛
) , 𝑓(𝑥) = (𝑓1(𝑥(𝑡))
⋮𝑓𝑛(𝑥(𝑡))
)
Jika masing-masing fungsi 𝑓1, 𝑓2, … , 𝑓𝑛 pada persamaan merupakan fungsi
linier dari variabel bebas 𝑡 dan variabel tak bebas 𝑥1, 𝑥2, … , 𝑥𝑛 , maka sistem
tersebut disebut sistem persamaan diferensial linier. Jika 𝑥(𝑡) merupakan variabel
tak bebas dengan variabel bebas 𝑡 , 𝑥′(𝑡) atau ��(𝑡 ) adalah turunan dari 𝑥(𝑡)
terhadap 𝑡 dan 𝑎(𝑡) adalah koefisien dari 𝑥(𝑡) , maka sistem dari 𝑛 persamaan
diferensial linear orde n dapat ditulis dalam bentuk

6
𝑎11𝑥 + 𝑎12𝑥′ +⋯+ 𝑎1(𝑛−1)𝑥
𝑛−1 + 𝑎1𝑛𝑥𝑛 = 𝑓1(𝑡)
𝑎21𝑥 + 𝑎22𝑥′ +⋯+ 𝑎2(𝑛−1)𝑥
𝑛−1 + 𝑎2𝑛𝑥𝑛 = 𝑓2(𝑡)
⋮
𝑎𝑛1𝑥 + 𝑎𝑛2𝑥′ +⋯+ 𝑎𝑛(𝑛−1)𝑥
𝑛−1 + 𝑎𝑛𝑛𝑥𝑛 = 𝑓𝑛(𝑡)
Sistem dari 𝑛 persamaan diferensial linear orde satu adalah
��1(𝑡) = 𝑥′1(𝑡)
= 𝑎11(𝑡)𝑥1(𝑡) + 𝑎12(𝑡)𝑥2(𝑡) + ⋯+ 𝑎1𝑛(𝑡)𝑥𝑛(𝑡)
+ 𝑓1(𝑡)
��2(𝑡) = 𝑥′2(𝑡)
= 𝑎21(𝑡)𝑥1(𝑡) + 𝑎22(𝑡)𝑥2(𝑡) + ⋯+ 𝑎2𝑛(𝑡)𝑥𝑛(𝑡)
+ 𝑓2(𝑡)
⋮
��𝑛(𝑡) = 𝑥′𝑛(𝑡)
= 𝑎𝑛1(𝑡)𝑥1(𝑡) + 𝑎𝑛2(𝑡)𝑥2(𝑡) + ⋯+ 𝑎𝑛𝑛(𝑡)𝑥𝑛(𝑡)
+ 𝑓𝑛(𝑡)
(2. 4)
Sistem (2.4) dapat ditulis dalam bentuk matriks
(
��1(𝑡)
��2(𝑡)⋮
��𝑛(𝑡))
= (
𝑎11(𝑡) 𝑎12(𝑡) ⋯
𝑎11(𝑡) 𝑎22(𝑡) ⋯⋮ ⋮ ⋱
) =
(
𝑥1(𝑡)
𝑥2(𝑡)⋮
𝑥𝑛(𝑡))
+
(
𝑓1(𝑡)𝑓2(𝑡)⋮
𝑓𝑛(𝑡))
Yang dapat ditulis dalam bentuk
��(𝑡) = Α(t)x(t) + f(t). (2. 5)
Jika fungsi 𝑓(𝑡) = 0, maka sistem (2.5) dikatakan homogen yang dapat ditulis
��(𝑡) = Α(t)x(t).
Jika koefisien sistem merupakan konstanta, maka Sistem (2.5) dapat ditulis
dalam bentuk

7
(
��1(𝑡)
��2(𝑡)⋮
��𝑛(𝑡))
= (
𝑎11 𝑎12 ⋯ 𝑎𝑛𝑎11 𝑎22 ⋯ 𝑎𝑛⋮ ⋮ ⋱ 𝑎𝑛𝑎𝑛 𝑎𝑛 … 𝑎𝑛
)
(
𝑥1(𝑡)
𝑥2(𝑡)⋮
𝑥𝑛(𝑡))
Yang secara singkat dapat ditulis
��(𝑡) = Αx(t).
2.4 Sistem Persamaan Diferensial Nonlinear
Jika masing-masing fungsi 𝑓1, 𝑓2, … , 𝑓𝑛 pada persamaan (2.3) bukan fungsi
linear dari variabel bebas 𝑡 dan variabel tak bebas 𝑥1, 𝑥2, … , 𝑥𝑛 , maka sistem
tersebut disebut sistem persamaan nonlinear. Sistem otonomus yang berisikan
persamaan-persamaan diferensial nonlinear orde satu dapat ditulis dalam bentuk
𝑑𝑥1𝑑𝑡
= 𝑓1(𝑥1, 𝑥2, … , 𝑥𝑛)
𝑑𝑥2𝑑𝑡
= 𝑓2(𝑥1, 𝑥2, … , 𝑥𝑛)
⋮
𝑑𝑥𝑛𝑑𝑡
= 𝑓𝑛(𝑥1, 𝑥2, … , 𝑥𝑛)
(2. 6)
2.5 Titik ekuilibrium
Solusi ekuilibrium terhadap sistem persamaan diferensial yang mana setiap
persamaan diferensial tidak secara eksplisit bergantung pada variabel indepent
(biasanya, t) adalah solusi konstan dari sistem tersebut. Sehingga solusi ekuilibrium
dari 𝑥′1 = 𝑓1(𝑥1, 𝑥2, … , 𝑥𝑛), 𝑥′2 = 𝑓2(𝑥1, 𝑥2, … , 𝑥𝑛),… , 𝑥
′𝑛 = 𝑓𝑛(𝑥1, 𝑥2, … , 𝑥𝑛)
ditemukan dengan menyelesaikan sistem 𝑓1(𝑥1, 𝑥2, … , 𝑥𝑛) = 0, 𝑥′2 =
𝑓2(𝑥1, 𝑥2, … , 𝑥𝑛) = 0,… , 𝑓𝑛(𝑥1, 𝑥2, … , 𝑥𝑛) = 0 untuk 𝑥1, 𝑥2, … , 𝑥𝑛 [11]
Definisi 2.5. [12]
Diberikan persamaan differensial orde 1

8
x = f (x) (2. 7)
solusinya dengan kondisi awal 𝑥(0) = 𝑥0, akan ditunjukkan oleh 𝑥(𝑡, 𝑥0), vector
�� yang menyatakan 𝑓(��) = 0 disebut dengan titik ekuilibrium.
Kestabilan titik ekuilibrium :
1. Sebuah titik ekuilibrium �� dikatakan stabil jika untuk setiap 휀 > 0
terdapat 𝛿 > 0 sedemikian sehingga jika ‖𝑥0 − ��‖ < 𝛿 maka
‖𝑥(𝑡, 𝑥0) − ��‖ < 휀 untuk setiap 𝑡 ≤ 0
2. Sebuah titik ekuilibrium 𝑥 dikatakan stabil asimtotis jika titik tersebut
stabil dan selain itu terdapat 𝛿1 > 0 sedemikian sehingga
lim𝑡→∞
‖𝑥(𝑡, 𝑥0) − ��‖ = 0 memenuhi ‖𝑥0 − ��‖ < 𝛿1
3. Sebuah titik ekuilibrium 𝑥 dikatakan tidak stabil jka titik tersebut tidak
stabil
2.6 Kestabilan Sistem Persamaan Diferensial Non Linear
Misalkan diberikan sistem persamaan nolinear seperti pada (2.6), maka sistem
tersebut dapat diselesaikan dengan menggunakan ekspansi Taylor di sekitar titik
ekuilibrium �� = (��1, ��2, … , ��𝑛), yaitu
𝑑𝑥1𝑑𝑡
= 𝑓1(x) +𝜕𝑓1(x)
𝜕𝑥1(𝑥1 − ��1) + ⋯+
𝜕𝑓1(x)
𝜕𝑥𝑛(𝑥𝑛 − ��𝑛)
+ 1
2
𝜕2𝑓1(x)
𝜕𝑥12(𝑥𝑛 − ��𝑛)
2 +⋯
𝑑𝑥2𝑑𝑡
= 𝑓2(x) +𝜕𝑓2(x)
𝜕𝑥1(𝑥1 − ��1) + ⋯+
𝜕𝑓2(x)
𝜕𝑥𝑛(𝑥𝑛 − ��𝑛)
+ 1
2
𝜕2𝑓2(x)
𝜕𝑥12(𝑥𝑛 − ��𝑛)
2 +⋯
⋮
𝑑𝑥𝑛𝑑𝑡
= 𝑓𝑛(x) +𝜕𝑓𝑛(x)
𝜕𝑥1(𝑥1 − ��1) + ⋯+
𝜕𝑓𝑛(x)
𝜕𝑥𝑛(𝑥𝑛 − ��𝑛)
+ 1
2
𝜕2𝑓𝑛(x)
𝜕𝑥12(𝑥𝑛 − ��𝑛)
2 +⋯

9
Linierisasi Sistem (2.6) di sekitar titik ekuilibrium �� = (��1, ��2, … , ��𝑛)
dilakukan dengan cara mengabaikan suku-suku yang pangkatnya lebih dari satu
pada hasil ekspansi deret Taylor di sekitar titik tersebut. Suku-suku yang
mempunyai pangkat lebih dari satu pada Sistem (2.4) diabaikan, sehingga diperoleh
𝑑𝑥1𝑑𝑡
= 𝑓1(x) +𝜕𝑓1(x)
𝜕𝑥1(𝑥1 − ��1) + ⋯+
𝜕𝑓1(x)
𝜕𝑥𝑛(𝑥𝑛 − ��𝑛)
𝑑𝑥2𝑑𝑡
= 𝑓2(x) +𝜕𝑓2(x)
𝜕𝑥1(𝑥1 − ��1) + ⋯+
𝜕𝑓2(x)
𝜕𝑥𝑛(𝑥𝑛 − ��𝑛)
⋮
𝑑𝑥𝑛𝑑𝑡
= 𝑓𝑛(x) +𝜕𝑓𝑛(x)
𝜕𝑥1(𝑥1 − ��1) + ⋯+
𝜕𝑓𝑛(x)
𝜕𝑥𝑛(𝑥𝑛 − ��𝑛)
(2. 8)
Persamaan (2.4) dapat ditulis dalam bentuk
(
𝑑𝑥1
𝑑𝑡𝑑𝑥2
𝑑𝑡
⋮𝑑𝑥𝑛
𝑑𝑡 )
=
(
𝜕𝑓1(x)
𝑑𝑥1
𝜕𝑓1(x)
𝑑𝑥2⋯
𝜕𝑓1(x)
𝑑𝑥𝑛
𝜕𝑓2(x)
𝑑𝑥1
𝜕𝑓2(x)
𝑑𝑥2⋯
𝜕𝑓2(x)
𝑑𝑥𝑛
⋮𝜕𝑓𝑛(x)
𝑑𝑥1
⋮𝜕𝑓𝑛(x)
𝑑𝑥2
⋮
⋯𝜕𝑓1(x)
𝑑𝑥1 )
(
𝑥1 − ��1𝑥2 − ��2⋮
𝑥𝑛 − ��𝑛
) (2. 9)
Misalkan
𝑣1 = 𝑥1 − ��1, 𝑣2 = 𝑥2 − ��2, … , 𝑣𝑛 = 𝑥𝑛 − ��𝑛 (2. 10)
sehingga diperoleh
𝑑𝑣1𝑑𝑡
=𝑑𝑥1𝑑𝑡,𝑑𝑣2𝑑𝑡
=𝑑𝑥2𝑑𝑡, … ,
𝑑𝑣𝑛𝑑𝑡
=𝑑𝑥𝑛𝑑𝑡
(2. 11)
Substitusikan Persamaan (2.10) dan (2.11) ke Sistem (2.9), sehingga Sistem (2.12)
dapat ditulis
𝑑𝑣1𝑑𝑡
= 𝑓1(x) +𝜕𝑓1(x)
𝜕𝑥1𝑣1 +⋯+
𝜕𝑓1(x)
𝜕𝑥𝑛𝑣𝑛 (2. 12)

10
𝑑𝑣2𝑑𝑡
= 𝑓2(x) +𝜕𝑓2(x)
𝜕𝑥1𝑣1 +⋯+
𝜕𝑓2(x)
𝜕𝑥𝑛𝑣𝑛
⋮
𝑑𝑣𝑛𝑑𝑡
= 𝑓𝑛(x) +𝜕𝑓𝑛(x)
𝜕𝑥1𝑣1 +⋯+
𝜕𝑓𝑛(x)
𝜕𝑥𝑛𝑣𝑛
atau
𝑑x
𝑑𝑡= 𝐽(��1, ��2,… ,��𝑛)𝑣 (2. 13)
Sistem (2.12) merupakan hasil linierisasi dari Sistem (2.6) di sekitar titik
ekuilibrium �� = (��1, ��2, … , ��𝑛). Matriks 𝐽(��1, ��2,… ,��𝑛) pada Sistem (2.13) disebut
matriks Jacobian di sekitar titik ekuilibrium �� = (��1, ��2, … , ��𝑛).
Sifat kestabilan titik ekuilibrium suatu sistem nonlinier dengan sifat ke
stabilan sistem linierisasinya dijelaskan dalam teorema berikut
Teorema 2.6[13]
Diberikan matriks Jacobian 𝐽(��1, ��2,… ,��𝑛) dari sistem (2.12)
1. Jika semua bagian real nilai eigen dari matriks 𝐽(��1, ��2,… ,��𝑛) bernilai
negatif, maka titik ekuilibrium �� = (��1, ��2, … , ��𝑛) dari Sistem Nonlinier
(2.6) stabil asimtotik lokal.
2. Jika terdapat paling sedikit satu nilai eigen dari matriks 𝐽(��1, ��2,… ,��𝑛)
bernilai positif, maka titik ekuilibrium �� = (��1, ��2, … , ��𝑛) dari Sistem
Nonlinear (2.6) tidak stabil.
2.7 Model Mangsa Pemangsa
Jika 𝑋(𝑡) dan 𝑌(𝑡) adalah jumlah mangsa dan pemangsa, dinamika
populasi dideskripsikan dengan dua persamaan turunan
𝑑𝑋
𝑑𝑇= (𝑟 − 𝛼𝑌)𝑋

11
𝑑𝑌
𝑑𝑇= (𝑒𝛼𝑋 −𝑚)𝑌
di mana 𝑟 adalah tingkat pertumbuhan mangsa per kapita, 𝛼 adalah tingkat
pencarian dan penangkapan satu pemangsa untuk satu mangsa sehingga 𝛼𝑋 adalah
tingkat konsumsi mangsa per pemangsa, 𝑒 adalah tingkat yang mana tingkat
mangsa yang dikonsumi dikonversi menjadi kelahiran pemangsa, dan 𝑚 adalah
tingkat kematian pemangsa. Model di atas, yang diformulasikan secara independent
oleh Alfred Lotka, kini dikenal sebagai model mangsa-pemangsa Lotka-
Volterra.Untuk jumlah populasi awal 𝑋(0) dan 𝑌(0) , model ini memprediksi
jumlah mangsa 𝑋(𝑡) dan pemangsa 𝑌(𝑡) di masa depan.
Model Lotka-Volterra mengasumsikan bahwa tingkat konsumsi mangsa oleh
pemangsa berkaitan erat dengan jumlah mangsa. Ini berarti pemangsa dibatasi oleh
jumlah mangsa di lingkungan. Meskipun ini mungkin masuk akal jika kepadatan
mangsa rendah, asumsi ini tidak masuk akal jika kepadatan mangsa tinggi dan
jumlah pemangsa terbatas oleh waktu dan hal-hal lain. Kebutuhan untuk deskripsi
yang lebih realistis muncul dari karya eksperimental G. F. Gausee mengenai
interatksi mangsa-pemangsa Protista. Dia mengamati bahwa untuk menjalaskan
pengamatan ekspreimentalnya, kebergantungan fungsi linear model Lotka-Volterra
harus diganti dengan fungsi nonlinear [14].
2.8 Fungsi Respons Holling
C. S. Holling memperkenalkan tiga tipe respons fungsional. Fungsi respons tipe
I adalah yang paling mirip dengan fungsi respons linear Lotka-Volterra, tapi
respons tersebut membuat asumsi batas maksimal pada tingkat konsumsi 𝑓𝐼(𝑋) =
min {𝛼 X, 𝑘𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑎} di mana konstanta adalah tingkat konsumsi mangsa saat
jumlah mangsa sangat tinggi. Fungsi respons ini ditemukan pada pemangsa pasif
yang tidak aktif berburu.
Fungsi respons tipe II membuat asumsi bahwa pemangsa terbatas oleh jumlah
yang tersedia pada waktu 𝑇 . Selama masa ini, pemangsa diasumsikan sedang
mencari mangsa (untuk 𝑇𝑠 unit) atau menangani mangsa (untuk 𝑇ℎ unit). Jika
tingkat pencarian pemangsa adalah 𝛼 dan X adalah jumlah kepadatan mangsa pada

12
saat ini, maka tingkat papasan antara pemangsa yang sedang berburu dengan
mangsa adalah 𝛼X. Jika menangani satu mangsa membutuhkan unit waktu ℎ, maka
𝑇ℎ = ℎ 𝛼 X 𝑇𝑠 . Sehingga, 𝑇 = 𝑇𝑠 + 𝑇ℎ = 𝑇𝑠(1 + ℎ 𝛼 X) dan jumlah mangsa yang
dikonsumsi oleh pemangsa selama masa 𝑇 adalah
𝑓II(𝑋) =𝛼 X 𝑇𝑠𝑇
=𝛼X
1 + ℎ𝛼X
yang merupakan fungsi respons Holling tipe II.
Fungsi respons Holling tipe II membuat asumsi bahwa tingkat pencarian
pemangsa 𝛼 independen dengan kepadatan mangsa. Namun, ada beberapa proses
ekologikal yang dapat membuat parameter ini menjadi sebuah fungsi dari
banyaknya mangsa, yaitu 𝛼(X). Proses ini termasuk, misalnya, ketidakmampuan
pemangsa untuk menangkap mangsa secara efektif pada tingkat kepadatan yang
rendah, pemangsa belajar (memangsa), mencari gambaran (mangsa), pemangsa
bergonta-ganti mangsa, dll. Saat disubtitusikan ke fungsi respons Holling tipe II,
kompleksitas ini dapat mengubah bentuk cekungan pada fungsi respons menjadi
bentuk sigmoid. Fungsi respons Sigmond disebut fungsi respons Holling tipe III.
Prototipe fungsi respons tersebut didapatkan saat 𝛼 digantikan oleh 𝛼𝑋𝜇−1 pada
fungsi respons Holling tipe II, yang kemudian mengarah kepada bentuk tertentu
dari fungsi respons Holling tipe III
𝑓𝐼𝐼𝐼(𝑋) = 𝛼𝑋𝜇
1 + 𝛼h𝑋𝜇
Untuk 𝜇 = 1, fungsi respons di atas serupa dengan fungsi respons Holling tipe II,
sementara untuk 𝜇 > 1 tingkat pencarian predator meningkat sejalan dengan
peningkatan kepadatan mangsa [14].
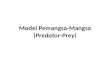
Gambar 2. 1 Tiga tipe fungsi respons Holling (panel kiri (a), Tipe I; (b), Tipe II;
(c), Tipe III) 𝑹𝒄𝒓𝒊𝒕 di panel (c) adalah kepadatan kritis mangsa saat fungsi respons
mulai stabil.

13
Gambar 2. 2 Bentuk pertumbuhan populasi untuk spesies dengan generasi yang
berkelanjutan.
A: Pertumbuhan populasi eksponensial pada lingkungan dengan sumber daya yang
tidak terbatas.
B: pertumbuhan populasi logistic pada lingkungan dengan sumber daya terbatas.
2.9 Model Pertumbuhan Logistik
Pertumbuhan populasi tidak dapat terus berlanjut hingga tak terbatas karena
sumber daya yang ada pada lingkungan tempatnya tinggal terbatas. Model
pertumbuhan populasi yang menunjukkan pertumbuhan di lingkungan terbatas
yang paling umum adalah persamaan logistik (biasanya disebut persamaan logistik
Verhulst-Pearl) yang memiliki limit maksimal pada kapasitas daya dukung (𝐾) dari
lingkungan tersebut:
𝑑𝑋
𝑑𝑇= 𝑟𝑋(1 −
𝑋
𝐾)
di mana 𝑟 adalah tingkat pertumbuhan intrinsik dan (1 −𝑋
𝐾) mewakili efek
individual pada populasi yang sama bersaing untuk mendapat sumber daya. Kurva
pertumbuhan adalah bentuk sigmoid. Tingkat perubahahn pada ukuran populasi
adalah yang tertinggi pada ukuran populasi rendah dan memiliki nilai nol setelah
populasi mencapai kapasitas daya dukung. Model pertumbuhan logistik Verhulst-
Pearl mengasumsikan ukuran populasi pada waktu 𝑇 hanya tergantung pada
kondisi pada 𝑇, 𝐾 adalah konstanta, dan setiap individual baru mengurangi tingkat
peningkatan popoulasi dengan 1
𝐾, menyebabkan penurunan pada 𝑟 m
enjadi fungsi linear 𝑋. Pada setiap nilai awal 𝑋 model tersebat akan mendekati 𝐾
secara monoton [15]

14
BAB III
MODEL MATEMATIKA MANGSA PEMANGSA DI
LINGKUNGAN BERACUN
3.1 Asumsi Model
Asumsi pembentukan model mangsa pemangsa dilingkungan beracun dapat
disusun sebagai berikut:
1. Populasi pemangsa dan mangsa diasumsikan tertutup artinya tidak terjadi
migrasi dalam populasi mangsa dan pemangsa.
2. Terjadi interaksi antara mangsa dan pemangsa.
3. Pertumbuhan populasi mangsa dan pemangsa mengikuti pertumbuhan
logistik.
4. Pemangsaan pemangsa pada kelas mangsa menggunakan responsHolling
tipe II.
5. Pertumbuhan populasi pemangsa bergantung pada pertumbuhan populasi
mangsa.
6. Kematian mangsa karena faktor alam diperhitungkan.
7. Populasi mangsa pemangsa dapat berkurang karena menyerap racun.
8. Tingkat masuknya konsentrasi racun pada lingkungan bernilai konstan.
3.2 Variabel Dan Parameter
Variabel dan parameter untuk model mangsa pemangsa dilingkungan beracun
diberikan pada Tabel 3.1 dan Tabel 3.2
Tabel 3. 1. Daftar variabel model mangsa pemangsa di lingkungan
beracun
No Variabel Definisi Syarat Satuan
1 𝑋(𝑡) Jumlah individu populasi mangsa pada
waktu ke - 𝑡 𝑋(𝑡) ≥ 0 Ekor

15
2 𝑌(𝑡) Jumlah individu populasi pemangsa pada
waktu ke - 𝑡 𝑌(𝑡) ≥ 0 Ekor
3 𝑆(𝑡) Konsentrasi racun pada organisme pada
waktu ke - 𝑡 𝑆(𝑡) ≥ 0 Massa
4 𝑉(𝑡) Konsentrasi racun pada lingkungan pada
waktu ke – 𝑡 𝑉(𝑡) ≥ 0 Massa
Tabel 3. 2 Daftar parameter model mangsa pemangsa di lingkungan
beracun
No Parameter Definisi Syarat Satuan
1 𝑟 Tingkat pertumbuhan relatif mangsa 𝑟 > 0 1
hari
2 𝐾 Daya dukung lingkungan pada mangsa 𝐾 > 0 Ekor
3 𝑟𝑦 Tingkat pertumbuhan relatif pemangsa 𝑟𝑦 > 0 1
hari
4 𝐾𝑦 Daya dukung lingkungan pada pemangsa 𝐾𝑦 > 0 Ekor
5 𝛼 Tingkat pencarian dan penangkapan
mangsa oleh pemangsa 𝛼 ≥ 0
1
hari
6 ℎ Tingkat penangkapan dan pencernaan
pemangsa ℎ ≥ 0
1
hari
7 𝑀 Tingkat kematian alami pada mangsa 𝑀 ≥ 0 1
hari
8 𝑈 Tingkat kematian alami pada pemangsa 𝑈 ≥ 0 1
hari
9 𝑄 Laju penambahan konsentrasi racun pada
lingkungan 𝑞 ≥ 0 Massa
10 𝜌1 Tingkat kematian mangsa karena racun 𝜌1 ≥ 0 1
hari
11 𝑒 Pengubahan konsumsi mangsa ke
kelahiran pemangsa 𝑒 ≥ 0 -
12 𝜌2 Tingkat kematian pemangsa karena racun 𝜌2 ≥ 0 1
hari

16
13 𝛾
Tingkat konsentrasi racun pada
lingkungan yang hilang akibat terserap
mangsa pemangsa
𝛾 ≥ 0 Massa
14 𝜇 Tingkat konsentrasi racun pada
lingkungan yang hilang secara alami 𝜇 ≥ 0 Massa
15 𝑏 Laju penambahan racun dari proses
memakan makanan oleh orgsnisme 𝑏 ≥ 0 Massa
16 𝜃 Tingkat konsentrasi racun pada organisme
yang hilang secara alami 𝜃 ≥ 0 Massa
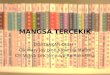
Diagram transfer model mangsa pemangsa di lingkungan beracun adalah
sebagai berikut:
Pertumbuhan mangsa diasumsikan mengikuti model logistik ketika tidak ada
interaksi antara mangsa pemangsa, dengan daya dukung sebesar 𝐾 dan tingkat
pertumbuhan relatifnya sebesar r sehingga mangsa mengalami pertumbuhan
dengan laju 𝑟𝑋 (1 −𝑋
𝐾). Ketika terdapat interaksi antara pemangsa dan mangsa
sebesar 𝑓(𝑋), maka pertumbuhan mangsa akan berkurang sebesar 𝑓(𝑋)𝑌 yang
merupakan laju perkalian antara fungsi respons Holling tipe II dengan populasi
pemangsa 𝑌 menjadi 𝑓(𝑋)𝑌 =𝛼𝑋𝑌
1+ℎ𝛼𝑋.
𝑟𝑋(1 −𝑋
𝐾)
𝜌1𝑋𝑆 𝜌2𝑌𝑆 𝛼𝑋𝑌
(1 + ℎ𝛼𝑋)
𝑀𝑋 𝑈𝑌 𝑟𝑦𝑌(1 −
𝑌
𝐾𝑦)
X Y V
𝜇𝑉
𝑞
𝛾𝑉
𝜃𝑆 𝑏 S
Gambar 3. 1 Diagram transfer model mangsa pemangsa di lingkungan
beracun

17
Selanjutnya populasi mangsa mengalami kematian alami dengan laju 𝑀
mengakbatkan populasi mangsa akan berkurang sebesar 𝑀𝑋.Populasi mangsa dan
pemangsa dapat menyerap racun dari lingkungan sekitarnya dan akibat penyerapan
racun tersebut, populasi mangsa mengalami penurunan dengan tingkat 𝜌1 sehingga
populasi mangsa akan berkurang sebesar 𝜌1𝑋𝑆.
𝑑𝑋
𝑑𝑇= 𝑟𝑋(1 −
𝑋
𝐾) −
𝛼𝑋𝑌
1 + ℎ𝛼𝑋− 𝜌1𝑋𝑆 −𝑀𝑋 (3.1)
Penurunan populasi pemangsa terjadi ketika tidak terdapatnya mangsa,
dengan laju kematian alami pemangsa sebesar 𝑈 , mengakibatkan populasi
pemangsa akan berkurang sebesar 𝑈𝑌 .Populasi pemangsa mengalami kenaikan
ketika terdapat mangsa dan terjadi interaksi antara mangsa pemangsa dengan
pertumbuhan populasi pemangsa diasumsikan mengikuti model logistik dengan
keterbatasan daya dukung lingkungan pemangsa 𝐾𝑦 = 𝛼𝑋 yaitu sebanding
dengan jumlah mangsa yang tersedia. Populasi pemangsa akan bertambah dengan
laju 𝑟𝑦𝑌(1 −𝑌
𝐾𝑦) dengan 𝑟𝑦 =
𝛼𝑋𝑒
(1+ℎ𝛼𝑋) yang merupakan respon numerik
menggunakan fungsi Holling tipe II dan 𝑒 adalah pengubahan konsumsi pemangsa
ke dalam kelahiran pemangsa. Kemudian populasi pemangsa akan mengalami
penurunan sebesar 𝜌2𝑌𝑆 karena menyerap racun di lingkungannya.
𝑑𝑌
𝑑𝑇= −𝑈𝑌 + 𝑟𝑦𝑌 (1 −
𝑌
𝐾𝑦) − 𝜌2𝑌𝑆 (3.2)
Tingkat masuknya konsentrasi racun pada lingkungan diasumsikan bernilai
konstan sebesar 𝑞. Tingkat konsentrasi racun pada lingkungan yang hilang diserap
oleh populasi mangsa dan pemangsa sebesar 𝛾, mengakibatkan konsentrasi racun
pada lingkungan mengalami penurunan sebesar 𝛾𝑉. Kemudian konsentrasi racun
pada lingkungan juga mengalami penurunan sebesar 𝜇𝑉, karena konsentrasi racun
hilang secara alami dengan laju sebesar 𝜇.
𝑑𝑉
𝑑𝑇= 𝑞 − (𝛾 + 𝜇)𝑉 (3.3)

18
Kemudian konsentrasi racun pada organisme mengalami penambahan dari
proses memakan makanan oleh organisme yang bernilai konstan, yaitu dengan laju
sebesar 𝑏 . Tingkat konsentrasi racun akan mengalami kenaikan karena adanya
konsentrasi racun yang diserap oleh mangsa dan pemangsa sebesar 𝛾𝑉 , dan
mengalami penuruna sebesar 𝜃𝑆, karena racun hilang secara alami sebesar 𝜃.
𝑑𝑆
𝑑𝑇= 𝑏 + 𝛾𝑉 − 𝜃𝑆 (3.4)
Model mangsa pemangsa dengan satu pemangsa dan satu mangsa di
lingkungan beracun berdasarkan persamaan (3.1),(3.2),(3.3),(3.4) berupa sistem
persamaan diferensial nonlinear sebagai berikut:
𝑑𝑋
𝑑𝑇 = 𝑟𝑋(1 −
𝑋
𝐾) −
𝛼𝑋𝑌
1+ℎ𝛼𝑋− 𝜌1𝑋𝑆 −𝑀𝑋
(3.5)
𝑑𝑌
𝑑𝑇 = −𝑈𝑌 + 𝑟𝑦𝑌 (1 −
𝑌
𝐾𝑦) − 𝜌2𝑌𝑆
𝑑𝑉
𝑑𝑇 = 𝑞 − (𝛾 + 𝜇)𝑉
𝑑𝑆
𝑑𝑇 = 𝑏 + 𝛾𝑉 − 𝜃𝑆
Dengan syarat awal 𝑋(0) = 𝑋0 , 𝑌(0) = 𝑌0 , 𝑆(0) = 𝑆0 dan 𝑉(0) = 𝑉0
semua parameter diasumsikan bernilai positif. Selanjutnya subtisusikan 𝑟𝑦𝑌 =
𝛼𝑋𝑒𝑌
(1+ℎ𝛼𝑋) dengan 𝐾𝑦 = 𝛼𝑋 menjadi:
𝑑𝑋
𝑑𝑇 = 𝑟𝑋(1 −
𝑋
𝐾) −
𝛼𝑋𝑌
1+ℎ𝛼𝑋− 𝜌1𝑋𝑆 −𝑀𝑋
(3.6)
𝑑𝑌
𝑑𝑇 = −𝑈𝑌 +
𝛼𝑋𝑒𝑌
(1+ℎ𝛼𝑋)−
𝛼𝑋𝑒𝑌2
(1+ℎ𝛼𝑋) 𝛼𝑋− 𝜌2𝑌𝑆
𝑑𝑉
𝑑𝑇 = 𝑞 − (𝛾 + 𝜇)𝑉
𝑑𝑆
𝑑𝑇 = 𝑏 + 𝛾𝑉 − 𝜃𝑆

19
Persamaan (3.6) dapat ditulis ke dalam bentuk non-dimensiaonal untuk
mengurangi jumlah parameter dengan mendefinisikan variable dan parameter
menggunakan nilai parameter berdasarkan [16] dan [6]sebagai berikut:
𝑡 = 𝑟𝑇 ⟺ 𝑇 =𝑡
𝑟 , 𝑥 =
𝑋
𝑘 ⇔ 𝑋 = 𝐾𝑥 ,
(3.7)
𝑦 =𝑌
𝛼𝐾⇔ 𝑌 = 𝛼𝐾𝑦 , �� =
𝑒
𝛼⇔ 𝑒 = 𝛼�� ,
𝑢 =𝑈
𝑟⇔ 𝑈 = 𝑟𝑢 , ℎ =
𝑟ℎ
𝛼⇔ ℎ =
𝛼 ℎ
𝑟 ,
��1 =𝑛𝜌1
𝑟⇔ 𝜌1 =
𝑟��1
𝑛, ��2 =
𝑛𝜌2
𝑟⇔ 𝜌2 =
𝑟��2
𝑛 ,
𝑠 =𝑆
𝑛⇔ 𝑆 = 𝑛𝑠 , 𝑚 =
𝑀
𝑟⇔𝑀 = 𝑟𝑚 ,
�� =𝜇
𝑟⟺ 𝜇 = 𝑟�� , �� =
𝛾
𝑟⟺ 𝛾 = 𝑟�� ,
𝑣 =𝑉
𝑛⟺ 𝑉 = 𝑛𝑣 , �� =
𝑞
𝑛𝑟⟺ 𝑞 = 𝑛𝑟�� ,
�� =𝑏
𝑛𝑟⟺ 𝑏 = 𝑛𝑟�� , �� =
𝜃
𝑟⟺ 𝜃 = 𝑟 ��,
𝛼 =𝑟��
𝛼𝐾
Kemudian Sistem (3.7) disubtitusikan ke Sistem (3.6) menjadi
𝑑(𝐾𝑥)
𝑑(𝑡𝑟)
= 𝑟(𝐾𝑥)(1 −𝐾𝑥
𝐾) −
𝑟��
𝛼𝐾(𝐾𝑥)(𝛼𝐾𝑦 )
1+𝛼 ℎ
𝑟.𝑟��
𝛼𝐾 (𝐾𝑥)
−𝑟��1
𝑛(𝐾𝑥)(𝑛𝑠) − (𝑟𝑚)(𝐾𝑥)
𝑑(𝛼𝐾𝑦)
𝑑(𝑡𝑟)
= −(𝑟𝑢)(𝛼𝐾𝑦) +𝑟��
𝛼𝐾 (𝐾𝑥)(𝛼��)(𝛼𝐾𝑦)
1+𝛼 ℎ
𝑟.𝑟��
𝛼𝐾 (𝐾𝑥)
−𝑟��
𝛼𝐾 (𝐾𝑥)(𝛼��)(𝛼𝐾𝑦)2
1+𝛼 ℎ
𝑟.𝑟��
𝛼𝐾 (𝐾𝑥) 𝛼(𝐾𝑥)
−
𝑟��2
𝑛(𝛼𝐾𝑦)(𝑛𝑠)
𝑑(𝑣𝑟)
𝑑(𝑡𝑟)
= 𝑛𝑟�� − (𝑟�� + 𝑟��)𝑛𝑣
𝑑(𝑛𝑠)
𝑑(𝑡𝑟)
= 𝑛𝑟�� + 𝑟��(𝑛𝑣) − 𝑟 ��(𝑛𝑠)
dan dapat disederhanakan menjadi
𝑟𝐾𝑑𝑥
𝑑𝑡 = 𝑟𝐾(𝑥(1 − 𝑥) −
��𝑥𝑦
1+ℎ𝛼𝑥− ��1𝑥𝑠 − 𝑚𝑥)
𝑟𝛼𝐾𝑑𝑦
𝑑𝑡 = 𝑟𝛼𝐾(−𝑢𝑦 +
��𝛼𝑥𝑦
1+ℎ𝛼𝑥−
���� 𝑦2
1+ℎ𝛼𝑥 − ��2𝑦𝑠)

20
𝑟𝑛𝑑𝑣
𝑑𝑡
= 𝑟𝑛(�� − (�� + ��)𝑣)
𝑟𝑛𝑑𝑠
𝑑𝑡
= 𝑟𝑛(�� + ��𝑣 − ��𝑠)
Kemudian dengan menghilangkan tanda bar dari semua parameter, maka sistem
menjadi
𝑑𝑥
𝑑𝑡
= (𝑥(1 − 𝑥) −𝛼𝑥𝑦
1+ℎ𝛼𝑥− 𝜌1𝑥𝑠 −𝑚𝑥)
(3.8)
𝑑𝑦
𝑑𝑡 = (−𝑢𝑦 +
𝛼𝑒𝑥𝑦
1+ℎ𝛼𝑥−
𝛼𝑒𝑦2
1+ℎ𝛼𝑥 − 𝜌2𝑦𝑠)
𝑑𝑣
𝑑𝑡
= (𝑞 − (𝛾 + 𝜇)𝑣)
𝑑𝑠
𝑑𝑡
=(𝑏 + 𝛾𝑣 − 𝜃𝑠)
Sehingga dapat ditulis ke dalam himpunan
Γ = {(𝑥, 𝑦, 𝑠, 𝑣)𝜖 ℝ ∶ 𝑥 ≥ 0, 𝑦 ≥ 0, 𝑠 ≥ 0, 𝑣 ≥ 0}
3.3 Titik Ekuilibrium Model
Model mangsa pemangsa di lingkungan beracun berupa system persamaan
differensial nonlinier. Sistem (3.8) diselesaikan dengan perilaku disekitar titik
ekuilibrium. Titik ekuilibrium model mangsa pemangsa diperoleh dengan
menetapkan
(𝑥(1 − 𝑥) −𝛼𝑥𝑦
1 + ℎ𝛼𝑥− 𝜌1𝑥𝑠 − 𝑚𝑥) = 0 (3.9)
(−𝑢𝑦 +𝛼𝑒𝑥𝑦
1 + ℎ𝛼𝑥−𝛼𝑒 𝑦2
1 + ℎ𝛼𝑥 − 𝜌2𝑦𝑠) = 0 (3.10)
(𝑞 − (𝛾 + 𝜇)𝑣) = 0 (3.11)
(𝑏 + 𝛾𝑣 − 𝜃𝑠) = 0 (312)
Dari persamaan (3.9) akan diperoleh nilai 𝑥 sebagai berikut:
(𝑥(1 − 𝑥) −𝛼𝑥𝑦
1+ℎ𝛼𝑥− 𝜌1𝑥𝑠 − 𝑚𝑥) = 0
⇔ 𝑥(1 − 𝑥)(1 + ℎ𝛼𝑥) − 𝛼𝑥𝑦 − (𝜌1𝑥𝑠 + 𝑚𝑥)(1 + ℎ𝛼𝑥) = 0

21
⟺ 𝑥(1 + ℎ𝛼𝑥 − 𝑥 − ℎ𝛼𝑥2) − 𝛼𝑥𝑦 − 𝑥(𝜌1𝑠 +𝑚)(1 + ℎ𝛼𝑥) = 0
⟺ 𝑥(1 + ℎ𝛼𝑥 − 𝑥 − ℎ𝛼𝑥2 − 𝛼𝑦 − 𝜌1𝑠 − 𝜌1𝑠ℎ𝛼𝑥 − 𝑚 −𝑚ℎ𝛼𝑥) = 0
⟺ 𝑥 = 0
atau
⟺−ℎ𝛼𝑥2 + ℎ𝛼𝑥 − 𝑥 − 𝜌1𝑠ℎ𝛼𝑥 − 𝑚ℎ𝛼𝑥 + 1 − 𝛼𝑦 − 𝜌1𝑠 − 𝑚 = 0
⟺ ℎ𝛼𝑥2 − ℎ𝛼𝑥 + 𝑥 + 𝜌1𝑠ℎ𝛼𝑥 + 𝑚ℎ𝛼𝑥 − 1 + 𝛼𝑦 + 𝜌1𝑠 + 𝑚 =
0
⟺ ℎ𝛼𝑥2 − (ℎ𝛼 − 1 − 𝜌1𝑠ℎ𝛼 −𝑚ℎ𝛼)𝑥 − (1 − 𝛼𝑦 − 𝜌1𝑠 −
𝑚) = 0 (3.13)
Dari persamaan (3.10) akan diperoleh nilai 𝑦 sebagai berikut:
(−𝑢𝑦 +𝛼𝑒𝑥𝑦
1+ℎ𝛼𝑥−
𝛼𝑒𝑦2
1+ℎ𝛼𝑥 − 𝜌2𝑦𝑠) = 0
⇔ −𝑢𝑦 (1 + ℎ𝛼𝑥) + 𝛼𝑒𝑥𝑦 − 𝛼𝑒𝑦2 − 𝜌2𝑦𝑠(1 + ℎ𝛼𝑥) = 0
⟺ 𝛼𝑒𝑥𝑦 − 𝛼𝑒𝑦2 − (𝑢𝑦 (1 + ℎ𝛼𝑥) + 𝜌2𝑦𝑠(1 + ℎ𝛼𝑥)) = 0
⟺ 𝑦(𝛼𝑒𝑥 − 𝛼𝑒y − (𝑢𝑦 (1 + ℎ𝛼𝑥) + 𝜌2𝑠(1 + ℎ𝛼𝑥)) = 0
⟺ 𝑦 = 0
atau
⟺ 𝛼𝑒𝑥 − 𝛼𝑒y − (𝑢 + 𝜌2𝑠)(1 + ℎ𝛼𝑥) = 0
⟺ 𝛼𝑒𝑥 − (𝑢 + 𝜌2𝑠)(1 + ℎ𝛼𝑥) = 𝛼𝑒y
⟺𝛼𝑒𝑥−(𝑢+𝜌2𝑠)(1+ℎ𝛼𝑥)
𝛼𝑒= 𝑦
⟺ 𝑥 −(𝑢+𝜌2𝑠)(1+ℎ𝛼𝑥)
𝛼𝑒= 𝑦 (3.14)
Dari persamaan (3.11) diperoleh
𝑣 =𝑞
(𝛾 + 𝜇) (3.15)
Dari persamaan (3.12) diperoleh

22
𝑠 =𝑏 + 𝛾𝑣
𝜃 (3.16)
Kemudian persamaan (3.15) disubtitusikan ke dalam persamaan
(3.16),diperoleh
𝑠∗ =𝑏 + 𝛾 (
𝑞(𝛾 + 𝜇)
)
𝜃
(3.17)
Berdasarkan uraian tersebut untuk memperoleh titik ekuilibrium 𝑇𝐸1
subtitusikan 𝑥 = 0 dan 𝑦 = 0 ke dalam persamaan (3.15) dan (3.16) diperoleh
𝑇𝐸1 = (0,0,𝑞
(𝛾 + 𝜇),𝑏 + 𝛾 (
𝑞(𝛾 + 𝜇)
)
𝜃) = (0,0, 𝑣∗, 𝑠∗)
Selanjutnya untuk menentukan titik ekuilibrium 𝑇𝐸2 subtitusi 𝑥 = 0 ke
dalam persamaan (3.16)
𝑦 = 𝑥 −(𝑢 + 𝜌2𝑠)(1 + ℎ𝛼𝑥)
𝛼𝑒
⟺ 𝑦 = 0 −(𝑢 + 𝜌2𝑠)(1 + 0)
𝛼𝑒
⇔ �� = −(𝑢 + 𝜌2𝑠)
𝛼𝑒
Sehingga diperoleh 𝑇𝐸2 = (0, ��,𝑞
(𝛾+𝜇),𝑏+𝛾(
𝑞
(𝛾+𝜇))
𝜃) = (0, ��, 𝑣∗, 𝑠∗)
Selanjutnya persamaan (3.15) dikali dengan 1
ℎ𝛼
𝑥2 − (1 − 𝜌1𝑠 − 𝑚 − 1
ℎ𝛼) 𝑥 − (
1 − 𝛼𝑦 − 𝜌1𝑠 − 𝑚
ℎ𝛼) = 0 (3.18)
Persamaan (3.18) merupakan persamaan kuadrat dan memiliki akar-akar
persamaan yaitu
𝑥1,2 = (1 − 𝜌1𝑠 − 𝑚 − 1
ℎ𝛼) ± √(1 − 𝜌1𝑠 − 𝑚 −
1
ℎ𝛼)2 + 4(
1−𝛼𝑦−𝜌1𝑠−𝑚
ℎ𝛼)
Selanjutnya
�� = (1 − 𝜌1𝑠 − 𝑚 − 1
ℎ𝛼) + √(1 − 𝜌1𝑠 − 𝑚 −
1
ℎ𝛼)2 + 4(
1−𝛼𝑦−𝜌1𝑠−𝑚
ℎ𝛼)
Kemudian 𝑥 = �� disubtitusikan ke persamaan (3.16)

23
𝑥 −(𝑢+𝜌2𝑠)(1+ℎ𝛼𝑥)
𝛼𝑒
⟺ (1− 𝜌1𝑠 − 𝑚 − 1
ℎ𝛼) + √(1 − 𝜌1𝑠 − 𝑚 −
1
ℎ𝛼)2 + 4 (
1−𝛼𝑦−𝜌1𝑠−𝑚
ℎ𝛼) −
(𝑢+𝜌2𝑠)(1+ℎ𝛼𝑥)
𝛼𝑒
⟺ (1− 𝜌1𝑠 − 𝑚 − 1
ℎ𝛼)2
+ (1 − 𝜌1𝑠 − 𝑚 − 1
ℎ𝛼)2
+ 4(1−𝛼𝑦−𝜌1𝑠−𝑚
ℎ𝛼) −
((𝑢+𝜌2𝑠)(1+ℎ𝛼𝑥)
𝛼𝑒)2
⟺ 2(1 − 𝜌1𝑠 − 𝑚 − 1
ℎ𝛼)2
+ 4(1−𝛼𝑦−𝜌1𝑠−𝑚
ℎ𝛼) − (
(𝑢+𝜌2𝑠)(1+ℎ𝛼𝑥)
𝛼𝑒)2
⇔2(1−𝜌1𝑠−𝑚−1)ℎ𝛼)
2
𝛼2ℎ2+
4
ℎ𝛼−4𝑦
ℎ−4𝜌1𝑠
ℎ𝛼−4𝑚
ℎ𝛼−(𝜌2𝑠(1+ℎ𝛼𝑥)+𝑢(1+ℎ𝛼𝑥))
2
𝛼2𝑒2
⇔ℎ
4(2(1−𝜌1𝑠−𝑚−1)ℎ𝛼)
2
𝛼2ℎ2+
4
ℎ𝛼−4𝜌1𝑠
ℎ𝛼−4𝑚
ℎ𝛼−(𝜌2𝑠(1+ℎ𝛼𝑥)+𝑢(1+ℎ𝛼𝑥))
2
𝛼2𝑒2) = ��
dengan ℎ ≠ 0, 𝛼 ≠ 0, 𝑒 ≠ 0
Sehingga diperoleh 𝑇𝐸3 = (��, ��,𝑞
(𝛾+𝜇),𝑏+𝛾(
𝑞
(𝛾+𝜇))
𝜃) = (��, ��, 𝑣∗, 𝑠∗)
Untuk mendapatkan titik ekuilibrium 𝑇𝐸4 subtitusi 𝑦 = 0 ke dalam
persamaan (3.20)
𝑥1,2 = (1 − 𝜌1𝑠 − 𝑚 − 1
ℎ𝛼) ± √(1 − 𝜌1𝑠 − 𝑚 −
1
ℎ𝛼)2 + 4(
1−𝜌1𝑠−𝑚
ℎ𝛼)
Didapatkan
�� = (1 − 𝜌1𝑠 − 𝑚 − 1
ℎ𝛼) + √(1 − 𝜌1𝑠 − 𝑚 −
1
ℎ𝛼)2 + 4(
1 − 𝜌1𝑠 − 𝑚
ℎ𝛼)
Dengan ℎ ≠ 0, 𝛼 ≠ 0
Sehingga diperoleh 𝑇𝐸4 = (��, 0,𝑞
(𝛾+𝜇),𝑏+𝛾(
𝑞
(𝛾+𝜇))
𝜃) = (��, 0, 𝑣∗,s)

24
BAB IV
ANALISIS KESTABILAN MODEL MANGSA PEMANGSA DI
LINGKUNGAN BERACUN
4.1 Analisis Kestabilan Titik Ekuilibrium
Kestabilan titik ekuilibrium model diselidiki dari hasil linearisasi Sistem (3.8)
disekitar titik ekuilibriumnya. Sistem (3.8) ditulis kembali menjadi
𝑓1(𝑥, 𝑦, 𝑣, 𝑠) = (𝑥(1 − 𝑥) −𝛼𝑥𝑦
1+ℎ𝛼𝑥− 𝜌1𝑥𝑠 −𝑚𝑥) (4.1)

25
𝑓2(𝑥, 𝑦, 𝑣, 𝑠) = (−𝑢𝑦 +𝛼𝑒𝑥𝑦
1+ℎ𝛼𝑥−
𝛼𝑒𝑦2
1+ℎ𝛼𝑥 − 𝜌2𝑦𝑠)
𝑓3(𝑥, 𝑦, 𝑣, 𝑠) = (𝑞 − (𝛾 + 𝜇)𝑣)
𝑓4(𝑥, 𝑦, 𝑣, 𝑠) = (𝑏 + 𝛾𝑣 − 𝜃𝑠)
Kemudian persamaan – persamaan pada Sistem (4.1) diturnkan secara parsial
terhadap 𝑥, 𝑦, 𝑣 dan 𝑠
1. Persamaan 𝑓1(𝑥, 𝑦, 𝑣, 𝑠) = (𝑥(1 − 𝑥) −𝛼𝑥𝑦
1+ℎ𝛼𝑥− 𝜌1𝑥𝑠 − 𝑚𝑥 ) diturnkan
secara parsial terhadap 𝑥, 𝑦, 𝑣 dan 𝑠 yaitu
𝜕𝑓1𝜕𝑥
= 𝑥 (𝛼2ℎ𝑦
(𝛼ℎ𝑥+1)2− 2) −
𝛼𝑦
𝛼ℎ𝑥+1−𝑚 − 𝑠𝜌1 + 1
(4.2)
𝜕𝑓1𝜕𝑦
= −𝛼𝑥
𝛼ℎ𝑥+1
𝜕𝑓1𝜕𝑣
= 0
𝜕𝑓1𝜕𝑠
= −𝑥𝜌1
2. Persamaan 𝑓2(𝑥, 𝑦, 𝑣, 𝑠) = (−𝑢𝑦 +𝛼𝑒𝑥𝑦
1+ℎ𝛼𝑥−
𝛼𝑒𝑦2
1+ℎ𝛼𝑥 − 𝜌2𝑦𝑠 )diturnkan
secara parsial terhadap 𝑥, 𝑦, 𝑣 dan 𝑠 yaitu
𝜕𝑓2𝜕𝑥
=𝑒𝛼𝑦(𝛼ℎ𝑦+1)
(𝛼ℎ𝑥+1)2
(4.3)
𝜕𝑓2𝜕𝑦
=𝑒𝛼(𝑥−2𝑦)
𝛼ℎ𝑥+1+ 𝑠(−𝜌2) − 𝑢
𝜕𝑓2𝜕𝑣
= 0
𝜕𝑓2𝜕𝑠
= −𝑦𝜌2
3. Persamaan 𝑓3(𝑥, 𝑦, 𝑣, 𝑠) = (𝑞 − (𝛾 + 𝜇)𝑣) diturnkan secara parsial
terhadap 𝑥, 𝑦, 𝑣 dan 𝑠 yaitu
∂f3∂x
= 0 (4.4)

26
∂f3∂y
= 0
∂f3∂v
= −(γ + μ)
∂f3∂s
= 0
4. Persamaan 𝑓4(𝑥, 𝑦, 𝑣, 𝑠) = (𝑏 + 𝛾𝑣 − 𝜃𝑠)diturnkan secara parsial terhadap
𝑥, 𝑦, 𝑣 dan 𝑠 yaitu
𝜕𝑓4𝜕𝑥
= 0
(4.5)
𝜕𝑓4𝜕𝑦
= 0
𝜕𝑓4𝜕𝑣
= 𝛾
𝜕𝑓4𝜕𝑠
= −𝜃
Setelah diturunkan kemudian membentuk matriks Jacobian sebagai berikut
𝐽(𝑓(𝑥, 𝑦, 𝑣, 𝑠)) =
(
𝑓1𝑥 𝑓1𝑦 𝑓1𝑣 𝑓1𝑠𝑓2𝑥 𝑓2𝑦 𝑓2𝑣 𝑓2𝑠𝑓3𝑥 𝑓3𝑦 𝑓3𝑣 𝑓3𝑠𝑓4𝑥 𝑓4𝑦 𝑓4𝑣 𝑓4𝑠)
(4.6)
Dengan
𝑓1𝑥 =𝜕𝑓1𝜕𝑥
𝑓1𝑦 =𝜕𝑓1𝜕𝑦
𝑓1𝑣 =𝜕𝑓1𝜕𝑣
𝑓1𝑠 =𝜕𝑓1𝜕𝑠
(4.7)
𝑓2𝑥 =𝜕𝑓2𝜕𝑥
𝑓2𝑦 =𝜕𝑓2𝜕𝑦
𝑓2𝑣 =𝜕𝑓2𝜕𝑣
𝑓2𝑠 =𝜕𝑓2𝜕𝑠
𝑓3𝑥 =𝜕𝑓3𝜕𝑥
𝑓3𝑦 =𝜕𝑓3𝜕𝑦
𝑓3𝑣 =𝜕𝑓3𝜕𝑣
𝑓3𝑠 =𝜕𝑓3𝜕𝑠
𝑓4𝑥 =𝜕𝑓4𝜕𝑥
𝑓4𝑦 =𝜕𝑓4𝜕𝑦
𝑓4𝑣 =𝜕𝑓4𝜕𝑣
𝑓4𝑠 =𝜕𝑓4𝜕𝑠

27
Persamaan matriks Jacobian (4.6) digunakan untk menganalisis kestabilan titik
ekuilibrium. Kemudian, titik –titik ekuilibrium 𝑇𝐸1, 𝑇𝐸2, 𝑇𝐸3, 𝑇𝐸4 disubtitusikan
ke Persamaan (4.7) untuk menganalisis kestabilannya
4.1.1 Analisis Kestabilan Titik Ekuilibrium 𝑻𝑬𝟏(𝟎, 𝟎, 𝒗∗, 𝒔∗)
Titik ekuilibrium 𝑇𝐸1(0,0, 𝑣∗, 𝑠∗) disubtitusikan ke Sistem (3.27)
𝑓1𝑥(𝑇𝐸1) = −𝑚 − 𝑠𝜌1 + 1 𝑓1𝑣(𝑇𝐸1) = 0
(4.8)
𝑓2𝑥(𝑇𝐸1) = 0 𝑓2𝑣(𝑇𝐸1) = 0
𝑓3𝑥(𝑇𝐸1) = 0 𝑓3𝑣(𝑇𝐸1) = −(𝛾 + 𝜇)
𝑓4𝑥(𝑇𝐸1) = 0 𝑓4𝑣(𝑇𝐸1) = 𝛾
𝑓1𝑦(𝑇𝐸1) = 0 𝑓1𝑠(𝑇𝐸1) = 0
𝑓2𝑦(𝑇𝐸1) = 𝑠(−𝜌2) − 𝑢 𝑓2𝑠(𝑇𝐸1) = 0
𝑓3𝑦(𝑇𝐸1) = 0 𝑓3𝑠(𝑇𝐸1) = 0
𝑓4𝑦(𝑇𝐸1) = 0 𝑓4𝑠(𝑇𝐸1) = −𝜃
Kemudian persamaan system (4.8) disubtitusikan ke persamaan matriks 𝐽(𝑓(𝑇𝐸1))
diperoleh
𝐽(𝑓(𝑇𝐸1)) = (
−𝑚 − 𝑠𝜌1 + 1 0 0 0
0 𝑠(−𝜌2) − 𝑢 0 0
0 0 −(𝛾 + 𝜇) 00 0 𝛾 −𝜃
) (4.9)
Persamaan karakteristik untuk 𝐽(𝑓(𝑇𝐸1)) adalah
⇔ |𝜆𝐼 − 𝐽(𝑓(𝑇𝐸1))| = 0
⇔ |(
𝜆 0 0 00 𝜆 0 00 0 𝜆 00 0 0 𝜆
) − (
−𝑚 − 𝑠𝜌1 + 1 0 0 0
0 𝑠(−𝜌2) − 𝑢 0 0
0 0 −(𝛾 + 𝜇) 00 0 𝛾 −𝜃
)| = 0
⇔ ||
λ − (−𝑚 − 𝑠𝜌1 + 1) 0 0 0
0 𝜆 + (𝑠𝜌2 + 𝑢) 0 0
0 0 λ + (𝛾 + 𝜇) 00 0 𝛾 𝜆 + 𝜃
|| = 0

28
⇔ ( λ − (−𝑚 − 𝑠𝜌1 + 1) )(𝜆 + (𝑠𝜌2 + 𝑢))(λ + (𝛾 + 𝜇))(𝜆 + 𝜃) = 0 (4.10)
Berdasarkan persamaan (4.10) diperoleh nilai-nilai eigen yaitu 𝜆1 = 1 − 𝑠𝜌1 −
𝑚 , 𝜆2 = −(𝑠𝜌2 + 𝑢) , 𝜆3 = −(𝛾 + 𝜇) dan 𝜆4 = −𝜃 . Karena
𝑢, 𝑠, 𝜌1, 𝜌2, 𝛾, 𝜇, 𝑚, 𝜃 > 0 maka 𝜆2, 𝜆3, 𝜆4 < 0 . Agar 𝑇𝐸1bersifat asimtotik lokal
haruslah 𝜆1 < 0. Artinya
1 − 𝑠𝜌1 −𝑚 < 0
⇔ 𝑠𝜌1 +𝑚 > 1
Sehingga titik ekuilibrium 𝑇𝐸1bersifat stabil asimtotik jika memenuhi syarat
𝑠𝜌1 +𝑚 > 1
4.1.2 Analisis Kestabilan Titik Ekuilibrium 𝑻𝑬𝟐(𝟎, 𝒚∗, 𝒗∗, 𝒔∗)
Titik ekuilibrium 𝑇𝐸2(0, 𝑦∗, 𝑣∗, 𝑠∗)disubtitusikan ke Sistem (3.27)
𝑓1𝑥(𝑇𝐸2) = 1 − 𝛼 +𝜌2𝑠+𝑢
𝑎𝑒−𝑚 − 𝑠𝜌1 = 𝑘11
(4.11)
𝑓1𝑦(𝑇𝐸2) = 0
𝑓1𝑣(𝑇𝐸2) = 0
𝑓1𝑠(𝑇𝐸2) = 0
𝑓2𝑥(𝑇𝐸2) = −(𝜌2𝑠 + 𝑢) (−(ℎ(𝜌2𝑠+𝑢))
𝑒+ 1) = 𝑘21
𝑓2𝑦(𝑇𝐸2) = 2𝜌2𝑠 + 𝑢 + 𝑠(−𝜌2) = 𝑘22
𝑓2𝑣(𝑇𝐸2) = 0
𝑓2𝑠(𝑇𝐸2) = (𝜌2𝑠+𝑢)𝜌2
𝛼𝑒= 𝑘24
𝑓3𝑥(𝑇𝐸2) = 0
𝑓3𝑦(𝑇𝐸2) = 0
𝑓3𝑣(𝑇𝐸2) = −(𝛾 + 𝜇) = 𝑘33
𝑓3𝑠(𝑇𝐸2) =0
𝑓4𝑥(𝑇𝐸2) = 0
𝑓4𝑦(𝑇𝐸2) = 0
𝑓4𝑣(𝑇𝐸2) = 𝛾 = 𝑘43

29
𝑓4𝑠(𝑇𝐸2) = −𝜃 = 𝑘44
Kemudian persamaan sistem (4.11) disubtitusikan ke persamaan matriks
𝐽(𝑓(𝑇𝐸2)) diperoleh
𝐽(𝑓(𝑇𝐸2)) = |
𝑘11 0 0 0𝑘21 𝑘22 0 𝑘240 0 𝑘33 00 0 𝑘43 𝑘44
|
Persamaan karakteristik untuk 𝐽(𝑓(𝑇𝐸2)) adalah
⇔ |𝜆𝐼 − 𝐽(𝑓(𝑇𝐸2))| = 0
⇔ |(
𝜆 0 0 00 𝜆 0 00 0 𝜆 00 0 0 𝜆
) − (
𝑘11 0 0 0𝑘21 𝑘22 0 𝑘240 0 𝑘33 00 0 𝑘43 𝑘44
)| = 0
⇔ |
𝜆 − 𝑘11 0 0 0−𝑘21 𝜆 − 𝑘22 0 −𝑘240 0 𝜆 − 𝑘33 00 0 −𝑘43 𝜆 − 𝑘44
| = 0
⇔ (𝜆 − 𝑘11 )(𝜆 − 𝑘22)(𝜆 − 𝑘33)(𝜆 − 𝑘44) = 0 (4.12)
Berdasarkan persamaan (4.12) diperoleh nilai-nlai eigen sebagai berikut
λ1 = 𝑘11 = 1 − 𝛼 +𝜌2𝑠+𝑢
𝑎𝑒−𝑚 − 𝑠𝜌1
λ2 = 𝑘22 = 2𝜌2𝑠 + 𝑢 + 𝑠(−𝜌2)
λ3 = 𝑘33 = −(𝛾 + 𝜇)
λ4 = 𝑘44 = −𝜃
Karena 𝑢, 𝑠, 𝜌1, 𝜌2, 𝛾, 𝜇,𝑚, 𝜃 > 0 maka 𝜆3, 𝜆4 < 0. Agar 𝑇𝐸2 bersifat asimtotik
lokal, haruslah 𝜆1, λ2 < 0, yaitu
𝜆1 < 0
⇔ −𝛼 +𝜌2𝑠+𝑢
𝑎𝑒−𝑚 − 𝑠𝜌1 < 0
⇔ 𝜌2𝑠 + 𝑢 −𝑚 − 𝑠𝜌1 < 𝛼(𝑎𝑒)

30
λ2 < 0
⇔ 2𝜌2𝑠 + 𝑢 + 𝑠(−𝜌2) < 0
⇔ 3𝜌2𝑠 + 𝑢 < 0
Sehingga TE2 bersifat asimtotik lokal jika memenuhi syarat
𝜌2𝑠 + 𝑢 −𝑚 − 𝑠𝜌1 < 𝛼(𝑎𝑒)
3𝜌2𝑠 + 𝑢 < 0
4.1.3 Analisis Kestabilan Titik Ekuilibrium 𝑻𝑬𝟑(��, ��, 𝒗∗, 𝒔∗)
Titik ekuilibrium 𝑇𝐸3(��, ��, 𝑣∗, 𝑠∗) disubtitusikan ke Sistem (3.27)
𝑓1𝑥(𝑇𝐸3) = �� (𝛼2ℎ��
(𝛼ℎ��+1)2− 2) −
𝛼��
𝛼ℎ��+1−𝑚 − 𝑠𝜌1 + 1 = 𝑔11
(4.13)
𝑓1𝑦(𝑇𝐸3) = −𝛼��
𝛼ℎ��+1= 𝑔12
𝑓1𝑣(𝑇𝐸3) = 0
𝑓1𝑠(𝑇𝐸3) = −��𝜌1 = 𝑔14
𝑓2𝑥(𝑇𝐸3) =𝑒𝛼��(𝛼ℎ��+1)
(𝛼ℎ��+1)2 = 𝑔21
𝑓2𝑦(𝑇𝐸3) =𝑒𝛼(��−2��)
𝛼ℎ��+1+ 𝑠(−𝜌2) − 𝑢 = 𝑔22
𝑓2𝑣(𝑇𝐸3) = 0
𝑓2𝑠(𝑇𝐸3) =−��𝜌2 = 𝑔24
𝑓3𝑥(𝑇𝐸3) = 0
𝑓3𝑦(𝑇𝐸3) = 0
𝑓3𝑣(𝑇𝐸3) = −(𝛾 + 𝜇) = 𝑔33
𝑓3𝑠(𝑇𝐸3) =0
𝑓4𝑥(𝑇𝐸3) = 0
𝑓4𝑦(𝑇𝐸3) = 0
𝑓4𝑣(𝑇𝐸3) = 𝛾 = 𝑔43
𝑓4𝑠(𝑇𝐸3) = −𝜃 = 𝑔44
Kemudian persamaan Sistem (4.13) disubtitusikan ke persamaan matriks
𝐽(𝑓(𝑇𝐸3)) diperoleh

31
𝐽(𝑓(𝑇𝐸3)) = (
𝑔11 0 0 𝑔14 𝑔21 𝑔22 0 𝑔24 0 0 𝑔33 00 0 𝑔43 𝑔44
) (4.14)
Persamaan karakteristik untuk 𝐽(𝑓(𝑇𝐸3)) adalah
⇔ |𝜆𝐼 − 𝐽(𝑓(𝑇𝐸3))| = 0
⇔ |(
𝜆 0 0 00 𝜆 0 00 0 𝜆 00 0 0 𝜆
) − (
𝑔11 0 0 𝑔14 𝑔21 𝑔22 0 𝑔24 0 0 𝑔33 00 0 𝑔43 𝑔44
)| = 0
⇔ |
𝜆 − 𝑔11 −𝑔12 0 −𝑔14 −𝑔21 𝜆 − 𝑔22 0 −𝑔24 0 0 𝜆 − 𝑔33 00 0 −𝑔43 𝜆 − 𝑔44
| = 0
⇔ (𝜆 − 𝑔44)(𝜆 − 𝑔33)(𝜆2 − 𝜆(𝑔11 − 𝑔22) + 𝑔11𝑔22 − 𝑔12
2) (4.15)
Dari persamaan (4.15) diperoleh nilai-nilai eigen yaitu 𝜆1 = 𝑔11, 𝜆2 = 𝑔33 dan
𝜆 =(𝑔11 − 𝑔22) + √(𝑔11 − 𝑔22)2 − 4(𝑔11𝑔22 − 𝑔122)
2
Sehingga diperoleh nilai-nilai eigen yang memenuhi persamaan karakteristik yaitu
λ1 = 𝑔11
λ2 = 𝑔33 = −(𝛾 + 𝜇)
λ3,4 = (𝑔11−𝑔22)±√(𝑔11−𝑔22)2−4(𝑔11𝑔22−𝑔122)
2
Karena u, s, ρ1, ρ2, γ, μ,m, θ > 0 agar TE3 bersifat asimtotik lokal maka
haruslah λ1 < 0, λ2 < 0dan λ3 < 0
Sehingga disyaratkan
𝜆1 < 0
⇔ 𝑔11 < 0
Agar
λ3,4 =(𝑔11−𝑔22)±√(𝑔11−𝑔22)2−4(𝑔11𝑔22−𝑔122)
2< 0
maka haruslah (𝑔11 − 𝑔22) < 0 dan 𝑔11𝑔22 − 𝑔122 > 0

32
Jadi agar TE3 bersifat asimtotik lokal maka harus memenuhi syarat
𝑔11 < 0
(𝑔11 − 𝑔22) < 0
𝑔11𝑔22 − 𝑔122 > 0
4.1.4 Analsisi Kestabilan Titik Ekuilibrium𝑻𝑬𝟒(��, 𝟎, 𝒗∗, 𝒔∗)
Titik ekuilibrium 𝑇𝐸4(��, 0, 𝑣∗, 𝑠∗) disubtitusikan ke Sistem (3.27)
𝑓1𝑥(𝑇𝐸4) = −2�� + 1 − 𝑚 − 𝑠𝜌1 = 𝑑11
(4.16)
𝑓1𝑦(𝑇𝐸4) = −𝛼��
𝛼ℎ��+1= 𝑑12
𝑓1𝑣(𝑇𝐸4) = 0
𝑓1𝑠(𝑇𝐸4) = −��𝜌1 = 𝑑14
𝑓2𝑥(𝑇𝐸4) = 0
𝑓2𝑦(𝑇𝐸4) =𝑒𝛼��
𝛼ℎ��+1− 𝑠𝜌2 − 𝑢 = 𝑑22
𝑓2𝑣(𝑇𝐸4) = 0
𝑓2𝑠(𝑇𝐸4) = 0
𝑓3𝑥(𝑇𝐸4) = 0
𝑓3𝑦(𝑇𝐸4) = 0
𝑓3𝑣(𝑇𝐸4) = −(𝛾 + 𝜇) = 𝑑33
𝑓3𝑠(𝑇𝐸4) =0
𝑓4𝑥(𝑇𝐸4) = 0
𝑓4𝑦(𝑇𝐸4) = 0
𝑓4𝑣(𝑇𝐸4) = 𝛾 = 𝑑43
𝑓4𝑠(𝑇𝐸4) = −𝜃 = 𝑑44
Kemudian persamaan sistem (4.16) disubtitusikan ke persamaan matriks
𝐽(𝑓(𝑇𝐸4)) diperoleh
𝐽(𝑓(𝑇𝐸4)) = |
𝑑11 𝑑12 0 𝑑140 𝑑22 0 00 0 𝑑33 00 0 𝑑43 𝑑44
|

33
Persamaan karakteristik untuk 𝐽(𝑓(𝑇𝐸4)) adalah
⇔ |𝜆𝐼 − 𝐽(𝑓(𝑇𝐸4))| = 0
⇔ |(
𝜆 0 0 00 𝜆 0 00 0 𝜆 00 0 0 𝜆
) − (
𝑑11 𝑑12 0 𝑑140 𝑑22 0 00 0 𝑑33 00 0 𝑑43 𝑑44
)| = 0
⇔ |
𝜆 − 𝑑11 −𝑑12 0 −𝑑140 𝜆 − 𝑑22 0 00 0 𝜆 − 𝑑33 00 0 −𝑑43 𝜆 − 𝑑44
| = 0
⇔ (𝜆 − 𝑑11 )(𝜆 − 𝑑22)(𝜆 − 𝑑33)(𝜆 − 𝑑44) = 0 (4.17)
Berdasarkan persamaan (3.32) diperoleh nilai-nlai eigen sebagai berikut
λ1 = 𝑑11 = −2�� + 1 −𝑚 − 𝑠𝜌1
λ2 = 𝑑22 =𝑒𝛼��
𝛼ℎ��+1− 𝑠𝜌2 − 𝑢
λ3 = 𝑑33 = −(𝛾 + 𝜇)
λ4 = 𝑑44 = −𝜃
Karena 𝑢, 𝑠, 𝜌1, 𝜌2, 𝛾, 𝜇,𝑚, 𝜃 > 0 maka 𝜆1, 𝜆3, 𝜆4 < 0 . Agar 𝑇𝐸4 bersifat
asimtotik lokal, haruslah λ2 < 0, yaitu
λ2 < 0
⇔𝑒𝛼��
𝛼ℎ��+1− 𝑠𝜌2 − 𝑢 < 0
⇔ 𝑒𝛼�� < 𝑠𝜌2 + 𝑢(𝛼ℎ�� + 1)
Jadi agar TE4 bersifat asimtotik lokal lokal maka harus memenuhi syarat
𝑒𝛼�� < 𝑠𝜌2 + 𝑢(𝛼ℎ�� + 1)

34
BAB V
PENUTUP
5.1 Kesimpulan
Berdasarkan uraian pada Bab III dan Bab IV, asumsi-asumsi model mangsa
pemangsa di lingkungan beracun di bentuk sistem persamaan diferensial non linear
seperti pada Sistem (3.8) dan hasil dari pembahasan pada sebelumnya diperoleh
kesimpulan sebagai berikut:

35
1. Model mangsa pemangsa di lingkungan beracun menggunakan fungsi Holling
tipe II dan fungsi logistic
2. Model mangsa pemangsa di lingkungan beracun menghasilkan 4 titik
ekuilibrium yaitu 𝑇𝐸1, 𝑇𝐸2, 𝑇𝐸3 dan 𝑇𝐸4
3. Analisi kestabilan lokal pada titik – titik ekuilibrium dihasilkan sebagai berikut
a. Jika 𝑠𝜌1 +𝑚 > 1 maka titik ekuilibrium 𝑇𝐸1 bersifat asimtotik lokal
b. Jika 𝜌2𝑠 + 𝑢 −𝑚 − 𝑠𝜌1 < 𝛼(𝑎𝑒) dan 3𝜌2𝑠 + 𝑢 < 0 maka titik
ekuilibrium 𝑇𝐸2 bersifat asimtotik lokal
c. Jika 𝑔11 < 0, (𝑔11 − 𝑔22) < 0 dan 𝑔11𝑔22 − 𝑔122 > 0 maka titik
ekuilibrium 𝑇𝐸3 bersifat asimtotik lokal
d. Jika 𝑒𝛼�� < 𝑠𝜌2 + 𝑢(𝛼ℎ�� + 1) maka titik ekuilibrium 𝑇𝐸1 bersifat
asimtotik lokal
5.2 Saran
Dalam penelitian ini, banyak hal yang mungkin dapat dikembangkan dimasa
yang akan datang, penulis menyarankan melakukan simulasi numerik kestabilan
titik ekuilibrium dengan data di kehidupan nyata atau meneliti model mangsa
pemangsa dengan menambah peubah yang belum terdapat dalam penelitian ini atau
mengembangkannya dengan metode yang lain .
DAFTAR PUSTAKA
[1] A.Minelli,“Predation,”S.E.JørgensenandB.D.B.T.-E. of E. Fath, Eds.
Oxford: Academic Press, 2008, pp. 2923–2929.
[2] A. A. Berryman, “The Orgins and Evolution of Predator-Prey Theory,”
Ecology, vol. 73, no. 5, pp. 1530–1535, 1992, doi: 10.2307/1940005.
[3] B. Se, I. Made, and J. Mejaya, “Wereng Cokelat sebagai Hama Global
Bernilai Ekonomi Tinggi dan Strategi Pengendaliannya,” Iptek Tanam.

36
Pangan, vol. 9, no. 1, pp. 1–12, 2015.
[4] Q.Huang,H.Wang,andM.A.Lewis,“Theimpactofenvironmentaltoxins
on predator–preydynamics,”J. Theor. Biol., vol. 378, pp. 12–30, 2015, doi:
https://doi.org/10.1016/j.jtbi.2015.04.019.
[5] S.Sinha,O.P.Misra,andJ.Dhar,“Modellingapredator-prey system with
infectedpreyinpollutedenvironment,”Appl. Math. Model., vol. 34, no. 7,
pp. 1861–1872, 2010, doi: 10.1016/j.apm.2009.10.003.
[6] I. Taufiq, I.Solekhudin,andSumardi,“ModelMangsa-Pemangsa Dengan
Dua PemangsaDan SatuMangsaDi Lingkungan Beracun,” Semin. Nas.
Mat. dan Pendidik. Mat. UNY, pp. 281–288, 2015.
[7] A.Mathematics,“IrhamTaufiqandDenikAgustito,”vol.2,no. 1, pp. 41–
50, 2020, doi: 10.15408/inprime.v2i1.14887.
[8] H. Anton, Aljabar Linear Elementer Versi Aplikasi, 8th ed. Jakarta:
Erlangga, 2004.
[9] G. Ledder, Differential Equations: A Modeling Approach. Boston: McGraw-
Hill Higher Education, 2004.
[10] B. Barnes and G. R. Fulford, Mathematical modelling with case studies:
Using mapleTM and MATLAB®, third edition. 2014.
[11] M.L.AbellandJ.P.Braselton,“IntroductiontoDifferentialEquations,”in
Introductory Differential Equations (Fourth Edition), Fourth Edi., M. L.
Abell and J. P. Braselton, Eds. Boston: Academic Press, 2014.
[12] G.J.Olsder, Mathematical Systems Theory, Second. Netherlands: Delft
University Press, 2003.
[13] L. Perko, Differential Equations and Dynamical Systems, 3rd ed. Verlag
New York: Springer, 2001.
[14] V.Křivan,“Prey–PredatorModels,”S.E.JørgensenandB.D.B.T.-E. of E.
Fath, Eds. Oxford: Academic Press, 2008, pp. 2929–2940.
[15] T.M.Swannack,“GrowthModels,”S.E.JørgensenandB.D.B.T.-E. of E.
Fath, Eds. Oxford: Academic Press, 2008, pp. 1799–1805.
[16] J. Alebraheem and Y. Abu-Hasan, “Persistence of predators in a two
predators-one prey model with non-periodicsolution,”Appl. Math. Sci., vol.

37
6, no. 17–20, pp. 943–956, 2012.
LAMPIRAN
A[2] := Matrix(4, 4, [[k[11], 0, 0, 0], [k[21], k[22], 0, k[24]], [0, 0, k[33], 0], [0, 0,
k[43], k[44]]])
B := Matrix(4, 4, [[lambda, 0, 0, 0], [0, lambda, 0, 0], [0, 0, lambda, 0], [0, 0, 0,
lambda]])
v[2] := Matrix(B - dm)
LinearAlgebra[Determinant]( v[2])

38
A[3] := Matrix(4, 4, [[g[11], g[12], 0, g[14]], [g[12], g[22], 0, g[24]], [0, 0, g[33],
0], [0, 0, g[43], g[44]]])
B := Matrix(4, 4, [[lambda, 0, 0, 0], [0, lambda, 0, 0], [0, 0, lambda, 0], [0, 0, 0,
lambda]])
v[3] := Matrix(B - A[3])
s:=LinearAlgebra[Determinant]( v[3] )
factor(s)
A[4] := Matrix(4, 4, [[d[11], d[12], 0, d[14]], [0, d[22], 0, 0], [0, 0, d[33], 0], [0, 0,
d[43], d[44]]])
B := Matrix(4, 4, [[lambda, 0, 0, 0], [0, lambda, 0, 0], [0, 0, lambda, 0], [0, 0, 0,
lambda]])
v[4] := Matrix(B - A[4])