Embed Size (px)
Citation preview

Alternative Asymptotics and the Partially LinearModel with Many Regressors1
Matias D. Cattaneo, Department of Economics, University of Michigan, [email protected].
Michael Jansson, Department of Economics, UC Berkeley, [email protected].
Whitney K. Newey, Department of Economics, MIT, [email protected].
July, 2010
Revised November, 2010
JEL classi�cation: C13, C31.
Keywords: partially linear model, many terms, adjusted variance.
1The authors thank comments from Alfonso Flores-Lagunes, seminar participants at Indiana, Michiganand MSU, and conference participants at the 2010 Joint Statistical Meetings and the 2010 LACEA ImpactEvaluation Network Conference.

Proposed Running Head: Semiparametric Asymptotics
Corresponding Author:
Whitney K. Newey
Department of Economics
MIT, E52-262D
Cambridge, MA 02142-1347
Abstract
1

1 Introduction
Many instrument asymptotics, where the number of instruments grows as fast as the sample
size, has proven useful for instrumental variable estimators. Kunitomo (1980) and Morimune
(1983) derived asymptotic variances that are larger than the usual formulae when the number
of instruments and sample size grow at the same rate, and Bekker (1994) and others pro-
vided consistent estimators of these larger variances. Hansen, Hausman, and Newey (2008)
showed that using many instrument standard errors provides a theoretical improvement for
a range of number of instruments and a practical improvement for estimating the returns to
schooling. Thus, many instrument asymptotics and the associated standard errors have been
demonstrated to be a useful alternative to the usual asymptotics for instrumental variables.
Instrumental variable estimators implicitly depend on a nonparametric series estimator.
Many instrument asymptotics has the number of series terms growing so fast that the se-
ries estimator is not consistent. Analogous asymptotics for kernel density weighted average
derivative estimators has been considered by Cattaneo, Crump, and Jansson (2010). They
�nd that when the bandwidth shrinks faster than needed for consistency of the kernel es-
timator the variance of the estimator is larger than the usual formula. They also �nd that
correcting the variance provides an improvement over standard asymptotics for a range of
bandwidths.
The purpose of this paper is to show that these results share a common structure and that
this structure can be used to derive new results. The common structure is that the object
determining the limiting distribution is a V-statistic, with a remainder that is a asymptot-
ically normal degenerate U-statistic. Asymptotic normality of the remainder distinguishes
this setting from other ones with V-statistics. Here the asymptotically normal remainder
comes from the number of series terms going to in�nity (or bandwidth shrinking to zero),
while the behavior of a degenerate U-statistic is more complicated in other settings. When
the number of terms grows as fast as the sample size the remainder has the same magnitude
as the leading term, resulting in an asymptotic variance larger than just the variance of
the leading term. The many instrument and small bandwidth results share this structure.
In keeping with this common structure, we will henceforth refer to such results under the
general heading of alternative asymptotics.
Applying the common structure to a series estimator of the partially linear model leads
to new results. These results allow the number of terms in the series approximation to
grow as fast as the sample size. The asymptotic distribution of the estimator is derived
2

and it is shown that it has a larger asymptotic variance than the usual formula. When
the disturbance is homoskedastic this larger variance is consistently estimated by using by
the usual homoskedasticity consistent estimator with the proper degrees of freedom. This
provides a large sample justi�cation for the use of a degrees of freedom correction without
normality of disturbances. It is also found that the White (1980) variance estimator is
inconsistent with many regressors, being too small when the disturbance is homoskedastic.
We give a variance estimator that is heteroskedasticity consistent when the number of series
terms grows as fast as the sample size. We also show that the new variance estimator provides
an improvement when the number of terms grows slower than the sample size. These results
suggest that the new standard errors should be useful for inference for a partially linear
model with many regressors.
In Section 2 we describe the common structure of many instrument and small bandwidth
asymptotics. In Section 3 we show how the structure leads to new results for the partially
linear model. Section 4 describes previous results for the partially linear model and Section 5
gives the new results. Section 6 provides some Monte Carlo evidence and Section 7 concludes.
2 A Common Structure
To describe the common structure of many instrument and small bandwidth asymptotics,
let W1; :::;Wn denote independent data observations. Also, let � denote an estimator and �0a corresponding true value. We consider estimators that satisfy
pn (�� �0) = �
�1Sn; Sn =nX
i;j=1
unij(Wi;Wj); (1)
where unij(wi; wj) is a function of a pair of observations that can depend on i; j; and n. We
allow u to depend on n to account for number of terms or bandwidths that change with the
sample size. Also, we allow u to vary with i and j to account for dependence on variables
that are being conditioned on in the asymptotics, and so treated as nonrandom. We will
illustrate in examples to follow.
We will assume throughout that �p�! � non-singular and focus on the V-statistic Sn:
That V-statistic has a well known decomposition that we describe here because it is an
essential feature of the common structure. For notational implicitly we will drop the Wi and
Wj arguments and let unij = unij(Wi;Wj) and ~unij = unij + unji � E[unij + unji]. We have the
3

following result.
Proposition 1: If E[kunijk2] <1 for all i; j; n then
Sn = n + Un +Bn, (2)
where
n =nXi=1
ni (Wi), ni (Wi) = unii � E[unii] +Xj 6=i
E[~unijjWi],
Un =
nXi=2
Dni (Wi;Wi�1; :::;W1), Dn
i (Wi; :::;W1) =Xj<i
�~unij � E[~unijjWi]� E[~unijjWj]
�,
Bn = E[Sn],
and
E[ ni (Wi)] = 0, E[Dni (Wi; :::;W1)jWi�1; :::;W1] = 0, E[nUn] = 0.
This result shows that Sn can be decomposed into a sum of independent terms n, a
U-statistic remainder Un that is a martingale di¤erence sum and uncorrelated with n, and
a pure bias term Bn. This decomposition of a V-statistic is well known, being referred to
by van der Vaart (1998, Chapter 11), and is included here for exposition. It is important in
many of the proofs of asymptotic normality of semiparametric estimators, including Powell,
Stock, and Stoker (1989), with the limiting distribution being determined by n, and Unbeing treated as a remainder that is of smaller order when the bandwidth shrinks slowly
enough.
An interesting feature of this decomposition in semiparametric settings is that Un is
asymptotically normal at some rate when the number of series terms grow or the bandwidth
shrinks to zero. In other settings the asymptotic behavior of Un is more complicated. It is
a degenerate U-statistic, that in general converges to a weighted sum of chi-squares, e.g. see
van der Vaart (1998, Chapter 12). Apparently what occurs in semiparametric settings as the
number of instruments grows or the bandwidth shrinks is that the individual contributions
Dni (Wi; :::;W1) to Un are small enough to satisfy a Lindeberg-Feller condition. Combined
with the martingale property of Un, as in Proposition 1 and is well known, this leads to
asymptotic normality of Un. This asymptotic normality property of Un has been shown for
4

both series and kernel estimators, as further explained below.
Alternative asymptotics occurs when the number of series terms grows or the bandwidth
shrinks fast enough that n and Un have the same magnitude in the limit. Because of
uncorrelatedness of n and Un the asymptotic variance will be larger than the usual formula
which is limn�!1V[n]. Thus, consistent variance estimation under alternative asymptoticsrequires accounting for the presence of Un.
Accounting for the presence of Un should also yield improvements when numbers of series
terms and bandwidths do not satisfy the knife-edge conditions of alternative asymptotics.
Intuitively, if the number of series terms grows just slightly slower than the sample size or the
bandwidth shrinks slightly slower than 1=n. then accounting for the presence of Un should
still give a better large sample approximation. Hansen, Hausman, and Newey (2008) show
such an improvement for many instrument asymptotics. It would be good to consider such
improved approximations more generally, though it is beyond the scope of this paper to do
so.
We can show that many instrument asymptotics has the structure we have outlined.
To keep the exposition simple we focus on the jackknife instrumental variables estimator
JIVE2 of Angrist, Imbens, and Krueger (1999). The limited information maximum likelihood
estimator could also be considered, for which many instrument asymptotics was carried
out by Kunitomo (1980) and Morimune (1983) some time ago, but the analysis is more
complicated. Consider a linear structural equation
yi = x0i�0 + "i, E["i] = 0, i = 1; :::; n,
where xi is a vector and yi and "i are scalar dependent variable and disturbance respectively.
Let Zi be a K � 1 vector of instrumental variables that we treat as constants. It is alsoequivalent to allow instrumental variables to be random but condition on the matrix of
observations Z = [Z1; :::; Zn]0 and replace unconditional moment conditions with conditional
ones.
To describe the estimator letQ = Z(Z 0Z)�Z 0 denote the projection matrix on the column
space of Z. The JIVE2 estimator takes the form
� =
Xi6=j
Qijxix0j
!�1Xi6=j
Qijxiyj.
5

Substituting for yj and collecting terms gives
pn(� � �0) =
Xi6=j
Qijxix0j=n
!�1Xi6=j
Qijxi"j=pn.
Here we can see that that JIVE2 is a special case of equation (1) with
�n = �0, � =Xi6=j
Qijxix0j=n, unii(Wi;Wi) = 0, unij(Wi;Wj) = Qijxi"j=
pn, i 6= j.
Note that E[unij(Wi;Wj)] = 0 and for �i = E[xi],
E[unij(Wi;Wj)jWi] = QijxiE["i] = 0, E[unij(Wi;Wj)jWj] = Qij�i"j=pn.
Here �i can be interpreted as the reduced form for observation i. Let vi = xi��i. ApplyingProposition 1, and using symmetry of the matrix Q, we �nd that equation (2) is satis�ed
with
ni (Wi) =
Xj 6=i
Qij�j
!"i = �i(1�Qii)"i=
pn�
�i �
Xi
Qij�j
!"i=pn,
Dni (Wi; :::;W1) =
Xj<i
Qij (vi"j + vj"i) =pn, Bn = 0.
Note that �i�P
iQij�j is the i-th residual from regressing the reduced form observations
on Z; so that by appropriate de�nition of the reduced form this can generally be assumed
to go to zero as the sample size grows. In that case
n =Xi
�i(1�Qii)"i=pn+ op(1).
Furthermore, under standard asymptotics Qii will go to zero, so the variance of this does
indeed correspond to the usual asymptotic variance for IV.
The degenerate U-statistic term is
Un =nXi=1
Xj<i
Qij (vi"j + vj"i) =pn.
Chao, Swanson, Hausman, Newey, and Woutersen (2010) apply the martingale central limit
6

theorem to show that this Un will be asymptotically normal when xi and "i have uniformly
bounded fourth moments, rank(Q) = dim(Z) = K �! 1, and Qii is bounded away from 1
uniformly in i and n. The conditions of the martingale central limit theorem are veri�ed by
showing that certain linear combinations with coe¢ cients depending on the elements of Q
go to zero as K �!1. In the proof, this makes individual terms asymptotically negligible,with a Lindeberg-Feller condition being satis�ed. Alternative asymptotics occurs when K
grows as fast as n, resulting in n and Un having the same magnitude in the limit.
As mentioned above, small bandwidth asymptotics for kernel estimators also has the
structure outlined above. To illustrate this we consider kernel estimation of the integrated
squared density. We use this example to keep the exposition relatively simple and because it
shares the common structure with the more interesting density weighted average derivative
estimator of Powell, Stock, and Stoker (1989) treated in Cattaneo, Crump, and Jansson
(2010). In this example the parameter of interest is
�0 =
Zf0(w)
2dw = E[f0(Wi)],
where Wi denotes a continuously distributed random variable with pdf f0. A �leave one out
estimator,�analogous to that of Powell, Stock, and Stoker (1989), is
� =Xi6=j
Kh(Wi �Wj)=n(n� 1);
where K(u) be a symmetric kernel with K(�u) = K(u) and Kh(u) = h�dK(u=h). This
estimator has the V-statistic form of equation (1) with
�0 =
Zf0(w)
2dw, � = 1, unii(Wi;Wi) = 0, unij(Wi;Wj) = Kh(Wi�Wj)=pn(n�1), i 6= j.
De�ne
fh(w) =
ZK(u)f(w + hu)du.
Note that by symmetry of K(u),
E[unij(Wi;Wj)jWi] = fh(Wi)=pn(n� 1), E[unij(Wi;Wj)jWj] = fh(Wj)=
pn(n� 1),
E[unij(Wi;Wj)] = E[fh(Xi)]=pn(n� 1).
7

Applying Proposition 1, and using symmetry of K(u), we �nd that equation (2) is satis�ed
with
ni (Wi) = 2ffh(Wi)� E[fh(Wi)]g=pn,
Dni (Wi; :::;W1) = 2
Xj<i
fKh(Wi �Wj)� fh(Wi)� fh(Wj) + E[fh(Wi)]g=pn(n� 1),
Bn =pnfE[fh(Wi)]� �0g.
Note that 2ffh(Wi)�E[fh(Wi)]g is an approximation to the well known in�uence function2[f0(Wi)��0] for estimators of the integrated squared density. As h! 0 we will have fh(Wi)
converging to f0(Wi) in mean square, so that
n =Xi
2[f0(Wi)� �0]=pn+ op(1).
The asymptotic variance of this leading term does correspond to the usual asymptotic vari-
ance for estimators of the integrated square density.
The degenerate U-statistic term is
Un = 2nXi=1
Xj<i
fKh(Wi �Wj)� fh(Wi)� fh(Wj) + E[fh(Wi)]g=pn(n� 1).
The martingale central limit theorem can be applied as in Cattaneo, Crump, and Jansson
(2010) to show that this Un will be asymptotically normal as h ! 0 and n ! 1 growing.
Intuitively, the bandwidth shrinking leads to Kh(Wi � Wj) being small except when Wi
and Wj are close, so that tail of the distribution ofpnDn
i (Wi; :::;W1) becomes thin and a
Lindeberg-Feller condition is satis�ed. Alternative asymptotics occurs when h shrinks as
fast as 1=n; resulting in n and Un having the same magnitude in the limit.
This pair of examples shows how several estimators share the common structure outlined
above. We now show how that structure can be applied to derive new results.
3 Series Estimation of the Partially Linear Model
To describe the partially linear model let (yi; x0i; z0i)0, i = 1; : : : ; n, be a random sample of the
random vector (y; x0; z0)0, where y 2 R is a dependent variable, and x 2 Rdx�1 and z 2 Rdz�1
8

are explanatory variables. The model is given by
yi = x0i� + g(zi) + "i, E ["ijxi; zi] = 0, �2(xi; zi) = E�"2i jxi; zi
�,
where vi = xi � h(zi), with h(zi) = E [xijzi].2 A series estimator of � is obtained by
regressing yi on xi and approximating functions of zi. To describe the estimator let pK(z) =
(pK1(z); : : : ; pKK(z))0 be an approximating functions, such as polynomials or splines, where
K denotes the number of terms in the regression. Here the unknown function g(z) will
be approximated by a linear combination of pkK(z). Also, let Y = [y1; � � � ; yn]0 2 Rn�1,X = [x1; � � � ; xn]0 2 Rn�dx, P = [pK(z1); : : : ; pK(zn)]0. A series estimator of � is given by
� = (X 0MX)�1X 0MY , M = I �Q, Q = P (P 0P )�P 0,
where A� denotes a generalized inverse of a matrix A (satisfying AA�A = A) and X 0MX
will be non-singular with probability approaching one under conditions given below. Donald
and Newey (1994) gave conditions for the asymptotic normality of this estimator.
Conditional on Z = [z1; :::; zn]0 this estimator has the structure outlined earlier. For
this reason we will condition on Z throughout the following discussion so that expectations
are implicitly conditional on Z. To explain how � �ts within the common structure, let
hi = E[xi] and vi = xi � hi: Also let gi = g(zi),
G = [g1; � � � ; gn]0, " = ["1; � � � ; "n]0, H = [h1; � � � ; hn]0, V = [v1; � � � ; vn]0.
By Y = X� +G+ " we have
pn(� � �) = (X 0MX=n)�1X 0M("+G)=
pn = ��1Sn,
� = X 0MX=n, Sn =Xi;j
xiMij(gj + "j)=pn.
This estimator has the V-statistic form of equation (1) with Wi = (yi; xi) and
�0 = �, � = X 0MX=n, unij(Wi;Wj) = xiMij(gj + "j)=pn.
By E["ijxi] = 0 we have E[xi"i] = 0. Therefore, letting unij = unij(Wi;Wj) as we have done
2See Robinson (1988) for the analysis of this model when using kernel regression, and Linton (1995) forthe corresponding higher-order properties.
9

previously, we have
E[unij] = HiMijgj=pn, unij � E[unij] =Mij (vigj + xi"j) =
pn,
~uij =Mij (vjgi + vigj + xj"i + xi"j) =pn, E[~uijjWi] =Mij (vigj + hj"i) .
Plugging these expressions into the formulas on Proposition 1 we obtain
ni (Wi) = Mii (vigi + hi"i + vi"i) =pn+
Xj 6=i
Mij (vigj + "ihj) =pn
=
"viMii"i + vi
Xj
Mijgj + "iXj
hjMij
#=pn,
Dni (Wi; :::;W1) =
Xj<i
Mij (vi"j + vj"i) =pn;Bn = H 0MG=
pn.
Summing up ni (Wi) it follows that
n =Xi
Miivi"i=pn+ (V 0MG+H 0M") =
pn.
The last term in this expression has mean zero and will converge to zero in mean square as
K grows, as further discussed below. Therefore, by Mii = 1�Qii;
n =Xi
(1�Qii)vi"i=pn+ op(1). (3)
Under standard asymptotics Qii will go to zero and hence the variance of this corresponds
to the usual asymptotic variance.
Noting that for j < i, Mij = �Qij, plugging in we �nd that the degenerate U-statisticterm is
Un = �nXi=1
Xj<i
Qij (vi"j + vj"i) =pn.
Remarkably this term is essentially the same as the degenerate U-statistic term for JIVE2
that was shown above. Consequently, the central limit theorem of Chao, Swanson, Hausman,
Newey, and Woutersen (2010) applies immediately to show that Un is asymptotically normal
as K �!1. This leads to many regressor asymptotics for series estimators of the partiallylinear model. It also illustrates the usefulness of the common structure, showing how that
10

structure can be used to derive new results.
4 Standard Asymptotics for the Series Estimator
The estimator � may be intuitively interpreted as a two-step semiparametric estimator with
smoothing parameter pK (�) and tuning parameter K, because the unknown (regression)functions g(�) and h (�) are non-parametrically estimated in a preliminary step by the se-ries estimator. In particular, the following assumption characterizes the rate at which the
approximation error of series estimator should vanish.
Assumption B. (i) For some �h > 0, there exists �h so that
1
nH 0MH =
1
nmin�kH � P�k2 = 1
n
nXi=1
h (zi)� pK (zi)0 �h 2 = Oas(K
�2�h).
(ii) For some �g > 0, there exists �g so that
1
nG0MG =
1
nmin�kG� P�k2 = 1
n
nXi=1
�g (zi)� pK (zi)
0 �g�2= Oas(K
�2�g).
The conditions required in Assumption B are implied by conventional assumptions from
the series-based nonparametric literature (e.g., Newey (1997, Assumption 3)). Thus, under
appropriate assumptions, commonly used basis of approximation such as polynomials or
splines will satisfy Assumption B with �h = dz=sh and �g = dz=sg, where sh and sg denotes
the number of continuous derivatives of h and g, respectively.
Under regularity conditions (given below) and Assumption B, Donald and Newey (1994)
obtained the following (infeasible) classical asymptotic approximation for � corresponding
to equation (3): If
nK�2(�h+�g) ! 0 andK
n! 0 (4)
thenpn(� � �) =
1pn
nXi=1
i + op(1)!d N (0;) , = ��1���1, (5)
where
i = ��1vi"i, � = E [viv0i] , � = E [viV ["jX;Z] v0i] .
11

The classical asymptotic linear representation of �, given in (5), is established by analyzing
the �rst-order stochastic properties of the �numerator�X 0M(Y �X�)=pn and �denomina-
tor� � of the estimator. Speci�cally, for the �denominator�, it can be shown (see Lemma 1
below) that if Condition (4) holds, then the (Hessian) matrix satis�es (recall thatM = I�Qand QP = P )
�n =1
nX 0MX =
1
nV 0MV + op(1) =
1
nV 0V � 1
nV 0QV + op(1)
=1
n
nXi=1
viv0i + op(1)!p �,
where the second equality captures the bias introduced by the series estimator (Assumption
B(i)), and the fourth equality requires the contribution of V 0QV to vanish asymptotically.
Similarly, it follows from equation (3) that the �numerator�of � satis�es
1pnX 0M (Y �X�) =
Xi
vi(1�Qii)"i=pn+ op(1) =
1pn
nXi=1
vi"i + op(1)!d N (0;�) ,
where the �rst equality is again related to the bias introduced by the nonparametric estimator
and the second equality will follow by Qii �! 0.
In both cases, the approximation error associated with the bias is controlled by the
condition nK�2(�h+�g) ! 0, which requires K to be �large�. On the other hand, condition
K=n! 0 guarantees that both V 0QV and V 0Q" are asymptotically negligible, as required for
the classical, asymptotically linear, approximation to be valid. The latter condition controls
the variance of the estimator, and it is directly related to the behavior of the nonparametric
estimator, which in this case is described by Q.
The classical approach to form a con�dence interval for �0 is to use the asymptotic
distributional result coupled with a consistent standard errors estimator. A plug-in approach
employs the (asymptotically) pivotal test statistic T0;n(K) = �1=20
pn(���), together with
a plug-in consistent estimator for 0. Under heteroskedasticity, a feasible test statistic is
given by
T0;n(Kn) = �1=2n
pn(� � �), n = �
�1n �n�
�1n ,
where
�n =X 0MX
n, �n =
1
n�K � dx
nXi=1
~xi~x0i"2i , " = ~Y � ~X 0� = ["1; � � � ; "n]0.
12

In this case, the standard error estimator is the classical Heteroskedasticity-Robust (HR)
standard errors estimator commonly used in regression analysis. Under Condition (4) it is
not di¢ cult to show that �1n 0 !p Idx.
5 Many Regressor Asymptotics
This section derives a generalized asymptotic distribution forpn(� � �), which relaxes the
condition Kn=n! 0. This non-standard asymptotic theory encompasses the classical result
discussed in the previous section, and also captures the e¤ect of the degenerate U-statistic
term of the expansion, which is negligible when K=n �! 0. Intuitively, this asymptotic
experiment captures the e¤ect of K �large�(relative to n) by breaking down the asymptotic
linearity of the estimator.
To characterize the generalized central limit theory, it is natural to study the stochastic
behavior of the estimatorpn(� � �) as a �ratio�of two bilinear forms:
pn(� � �) =
�1
nX 0MX
��1pnX 0M (Y �X�) = ��n
1pnX 0M (Y �X�) .
The following lemma characterizes the behavior of the Hessian matrix �n under quite
weak conditions.
Lemma 1. Suppose that E[kvik4] � Cv <1 (a.s.) and Assumption B(i) holds. Then,
�n =1
nX 0MX = �n + op(K=n), �n =
1
n
nXi=1
MiiE [viv0ijzi] = Oas(1 +K=n).
This lemma characterizes the stochastic behavior of the Hessian matrix under conditions
that are weaker than those entertained by the classical, asymptotically linear, distribution
theory. Speci�cally, because M = I � Q is an idempotent symmetric matrix, Mii 2 (0; 1)and
Pni=1Mii � n � K, Lemma 1 implies that �n remains asymptotically bounded even
when K=n 6! 0. In particular, �n = E [viv0i] + op (1) when K=n ! 0. Moreover, in the
case of homoskedasticity of vi, that is, if E [viv0ijzi] = E [viv0i] (and rank (Q) = K), then
�n = (1�K=n)E [viv0i]. Finally, if �min (E [viv0ijzi]) � FV > 0 and Mii = 1 � Qii � FQ > 0
(a.s.) then �min (�n) � FQFV > 0. (�min (A) denotes the minimum eigenvalue of a matrix
A.)
13

To fully characterize the asymptotic behavior of the �numerator� ofpn(� � �) it is
convenient to proceed in two steps. First, under appropriate bias assumptions, it is possible
to show that the numerator is asymptotically equivalent to a quadratic form based on mean-
zero random variables.
Lemma 2. Suppose the assumptions of Lemma 1 hold, and E["4i ] � C" < 1 (a.s.) and
Assumption B(ii) holds. Then,
(V 0MG+H 0M"+H 0MG) =pn = Op(
pnK�(�h+�g) +K��h +K��g).
As in Lemma 1, this result only requires bounded moments and a bias condition. In
this case, the bias arises from the approximation of both unknown functions h and g. As
mentioned above, the high-level Assumption B is implied by the standard assumption of best
approximation from the sieve literature. Interestingly, in this model there is a trade-o¤ in
terms of curse of dimensionality: provided that min f�h; �gg > 0, the bias condition is givenbypnK�(�h+�g) ! 0, which implies a trade-o¤ between smoothness and dimensionality
between h and g.
Lemma 2 justi�es focusing on the bilinear form
�n =1pnV 0M" =
1pn
nXi=1
nXj=1
Mijvi"j,
where E [�njZ;X] = 0. Moreover, under the assumptions imposed in Lemma 2, a simple
variance calculation yields
�n = V [�njZ] =1
n
nXi=1
nXj=1
M2ijE[viv0i"2j ] = Oas (1 +K=n) .
In particular, if K=n! 0 then
�n =1
n
nXi=1
M2iiE�viv
0i"2i jzi�+ op (1) = E
�viv
0i"2i
�+ op (1) = � + op (1) ,
as given in Section 2. Moreover, under homoskedasticity, that is, if E ["2i jxi; zi] = �2, then
V�1pnV 0M"
����X;Z� = �2
nV 0MV ,
14

and
�n =�2
n
nXi=1
nXj=1
M2ijE [viv0ijzi] = �2�n,
becausePn
j=1M2ij = Mii. Furthermore, if E ["2i jxi; zi] = �2 and E [viv0ijzi] = E [viv0i] (and
rank (Q) = K (a.s.)), then �n = �2 (1�K=n)E [viv0i]. Finally, if �min (E [viv0i"2jzi]) � FV " >
0 and Mii = 1�Qii � FQ > 0 (a.s.), then �min (�n) � F 2QFV " > 0.
The following Lemma characterizes the asymptotic distribution of the bilinear form �n.
Lemma 3. Suppose the assumptions of Lemma 2 hold, and Mii > FM > 0 (a.s.) and
�min (�n) > F� > 0 (a.s.). Then,
��1=2n
1pnV 0M"!d N (0; Idx) .
The following theorem is a direct consequence of the previous lemmas and Slutsky The-
orem, and constitutes the main result of this section.
Theorem 1. Suppose the assumptions of Lemma 3 hold and suppose �min (�n) > FH > 0.
Then, if
nK�2(�x+�g) ! 0 andK
n! � 2 [0; 1) (6)
then
�1=2n (� � �)!d N (0; Idx) . (7)
If, moreover, (�n;�n) = (�1;�1) + op (1) for some (�1;�1), then
pn(� � �)!d N (0;1) , 1 = �
�11 �1�
�11 .
If, moreover, E ["2i jxi; zi] = �2 for some �2, then
pn(� � �)!d N
�0; �2��11
�.
Theorem 1 shows that the central limit theorem for � holds under the weaker condition
(6). (Compare to Condition (4).) This result does not rely on asymptotic linearity, nor on
the actual convergence of the matrices �n and �n. However, if K=n ! 0, then (�n;�n) =
(�;�)+op (1) with � = E [viv0i] and � = E [viv0i"2i ], and the resulting large sample distributiontheory does rely on the asymptotically linear representation of �, as given in (5).
15

Importantly, if K=n 9 0 and (�n;�n) = (�;�) + op (1), then � 6= E [viv0i] and � 6=E [viv0i"2i ], in general. For instance, if (vi; "i) is independent of zi, then �n = (1�K=n)E [viv0i]and
�n =
�1� K
n
�E�viv
0i"2i
�+
1
n
nXi=1
Q2ii �K
n
!�E�viv
0i"2i
�� E [viv0i]E
�"2i��.
6 Standard Errors
This section discusses di¤erent homoskedastic- and heteroskedastic- standard errors estima-
tors, and their properties under the generalized asymptotics studied in this paper.
6.1 Homoskedasticity
If E ["2i jxi; zi] = �2 for all i = 1; 2; � � � ; n, then �n = �2��n . Thus, a natural plug-in estimator
is given by VHOM = �2��, where �2 is chosen so that �2 = �2 + op (1). The usual OLS
estimator is
�2n =1
n�K � dx
nXi=1
"2i =1
n�K � dx"0".
As shown in Lemma 1, �n = �n + op(1) under the many terms asymptotics discussed in
this paper (Condition (6)), and therefore it remains to verify that �2n is also consistent under
this generalized asymptotic experiment. This estimator is consistent because
"0" = (Y �X�)0M(Y �X�) = "0M"+ op(1) = (n�K)�2 + op(1),
where the �rst approximation is based on thepn-consistency of � and the approximation
bias of the series estimator, while the second approximation is based on the fact that the
bilinear form "0M" = "0(I �Q)" is dominated by its diagonal.
Theorem 2. Suppose the assumptions of Theorem 1 hold. Then, �2n = �2 + op (1).
It follows by Lemma 1, Theorem 2 and Slutsky Theorem that
VHOM = �2��n + op (1) = �n + op (1) ,
and therefore
V�1=2HOM(� � �0)!d N (0; Id) ,
16

under Condition (6). Thus, under known homoskedasticity, the usual �nite sample stan-
dard errors estimator from least squares theory turns out to be valid even when K is large.
However, the �consistent�but biased standard errors estimator ("0"=n)��n will not be con-
sistent unless K=n! 0, which implies that using the �nite sample, unbiased standard errors
estimator under homoskedasticity is important even in large samples when the degrees of
freedom is small (i.e., when K is large).
6.2 Heteroskedasticity
Under heteroskedasticity of unknown form, a natural candidate for standard errors estimator
is the (family of) Eicker-Huber-White estimators given by
VHR = ( ~X0 ~X)� ~X 0� ~X( ~X 0 ~X)� =
1
n��n �n�
�n ,
�n =1
nX 0M�MX, � = diag
�!1"
21; � � � ; !n"2n
�=
2664!1"
21
. . .
!n"2n
3775where f!i : i = 1; � � � ; ng are appropriate weights. Classical choices of weights include !i = 1,!i = n=(n � K � dx), !i = M�1
ii , etc. Since �n = �n + op(1) according to Lemma 1, it
only remains to characterized the middle matrix of this classical sandwich formula. The
asymptotic properties of �n are given by
�n =1
n
nXi=1
!i~xi~x0i"2i =
1
n
nXi=1
!i~vi~v0i~"2i + op(1) =
1
n
nXi=1
E�!i~vi~v
0i~"2i
��Z�+ op(1),
where, as before, the �rst approximation captures the bias of the series estimator and removes
the estimation error of �, and the second approximation shows that a (conditional) law of
large numbers holds in this case (i.e., a variance condition). This results is summarized in
the following theorem.
Theorem 3. Suppose the assumptions of Theorem 1 hold, nK�2(�g+�h)+1 ! 0 withminf�g; �hg >1=2, and !i 2 � (Z) for all i with j!ij � C!. Then, �n = ~�n + op(1), where
~�n =1
n
nXi=1
nXj=1
nX`=1
!iM2i`M
2j`
!E�viv
0i"2j
�� zi; zj� .17

Recall that the population asymptotic middle matrix �n is given by
�n =1
n
nXi=1
nXj=1
M2ijE[viv0i"2j jzi; zj],
which implies that the classical HR standard errors will not be consistent in general when
Condition (6). For example, the bias may be characterized under homoskedasticity: assum-
ing E ["2i jxi; zi] = �2 and !i = 1, a simple calculation yields
�n =�2
n
nXi=1
MiiE [viv0ijzi] ,
while, using basic properties of idempotent matrices, it is easy to verify that
~�n = �n �1
n
nXi=1
nXj=1
M2ij (1�Mjj)E [viv0ijzi] < �n.
As a consequence, the classical Eicker-Huber-White estimator is downward biased when K
is �large�. It is important to note that this result continue to hold in a simple linear model
where the number of regressors is �large�when compared to the sample size. Therefore, there
is an important sense in which the classical HR standard errors estimator is not robust, even
in a simple linear model.
On the other hand, if K=n! 0, then the asymptotic results presented above imply that~�n = �n + op(1), which veri�es that the classical HR standard errors estimator is indeed
consistent under heteroskedasticity of unknown form.
6.3 HR and Many Terms Robust Standard Errors
Intuitively, the failure of the classical HR standard errors estimator is due to the fact that
both ~xi and "i are estimated with too much error when K=n 6! 0. Thus, it is possible to �x
this problem by considering alternative (consistent) estimators for either ~xi or "i. To describe
the new estimators, let Kg and Kh be two choices of truncation for an approximation series,
and let~X = (I �Qh)X, Qh = PKh
(P 0KhPKh
)�P 0Kh, Mh = I �Qh,
" = (I �Qg)", Qg = PKg(P0KgPKg)
�P 0Kg, Mg = I �Qg.
18

Using this notation, Theorem 3 may be extended to the following result.
Theorem 4. Suppose the assumptions of Theorem 1 hold, nK1=2g K
�2�gg K
1=2h K�2�h
h ! 0
with minf�g; �hg > 1=2, and !i 2 � (Z) for all i with j!ij � C!. Then
��n =1
n
nXi=1
nXj=1
nX`=1
!iM2h;i`M
2g;j`
!E�viv
0i"2j jzi; zj
�.
This theorem leads naturally to two alternative recipes for heteroskedasticity and many
terms robust estimators. Speci�cally, for !i = 1, ifminfKh; Kgg = o (n) andmaxfKh; Kgg =K, then ��n = �n + op(1). This result implies that
V�1=2HET (� � �0)!d N (0; Id) , VHET =
1
n��n��n�
�n .
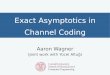
7 Simulations
To explore the consequences of using many terms in the partially linear model, or alterna-
tively using many covariates in a linear model, this section reports preliminary results from
a Monte Carlo experiment. Speci�cally, the simulations consider the following model:
yi = x0i� + g(zi) + "i, "i = �" (xi; zi)u1i,
xi = h (zi) + vi, vi = �v (zi)u2i,
with dx = 1, dz = 10, g (z) = 1, h (z) = 0, and u = (u1i; u1i)0 � N (0; I2) and zi � U (�1; 1)independently of u. Note that this data generating process does not have smoothing bias.
Four models of heteroskedasticity are considered, as given in Table 1 (with � = (1; 1; � � � ; 1)0 2Rdz).
Table 1: Simulation Models ()
�2v (zi) = 1 �2v (zi) = (z0i�)
2
�2" (xi; zi) = 1 Model 1 Model 3
�2" (xi; zi) = (z0i�+ xi)
2 Model 2 Model 4
For simplicity, the simulations consider additive-separable power series, that is, the
unknown function g(zi) is assumed to satisfy g(zi) = 1 + g1 (z1i) + � � � + gdz (zdzi) and
each component is estimated by gj (zji) � pK (zji)0 j, j = 1; 2; � � � ; dz, with pK (zji) =
(0; zji; z2ji; � � � ; zK�1ji )0.
19

We consider the classical least squares homoskedasticity-consistent standard errors esti-
mators
VHO1 ="0"
n�� and VHO2 =
"0"
n�K � dx��,
and the classical heteroskedasticity-consistent standard errors estimators
VHR1 = �� ~X 0� ~X��, � = diag ("1; � � � ; "n) =n,
VHR2 = �� ~X 0� ~X��, � = diag ("1; � � � ; "n) =(n�K � dx).
Also, we report the two alternative heteroskedasticity- and many terms- robust standard
errors estimators proposed in Theorem 4. These estimators are given by
VCJN1 = �� ~X 0� ~X��, � = diag ("1; � � � ; "n) =n, Kh = KCV , Kg = K,
VCJN2 = �� ~X 0� ~X��, � = diag ("1; � � � ; "n) =n, Kh = K, Kg = KCV ,
where KCV represents a cross-validation estimate of the optimal K.
The results are presented in Figure 1, for a grid of K = (0; 1; 2; � � � ; 20). The e¤ectivedegrees of freedom is determined by the choice of K and dz.
20

8 Technical Appendix
All statements involving conditional expectations are understood to hold almost surely. Recall that M =
I �Q is symmetric and idempotent, and therefore jMiij � 1, n�K =Pn
i=1Mii and Mij =Pn
`=1Mi`M`j .
Proof of Lemma 1. It follows from H 0MH=n = op (1) and the Cauchy-Schwarz inequality that
X 0MX=n = (V +H)0M (V +H) =n = V 0MV=n + H 0MH=n + 2H 0MV=n = V 0MV=n + op (1), provided
that
V 0MV=n =nXi=1
Miiviv0i=n+
nXi=1
Xj 6=i
Mijviv0j=n = Op(1).
Using jMiij � 1 and the Markov inequality,
nXi=1
Miiviv0i=n =
nXi=1
MiiE [viv0ijzi] =n+ op (1) ,
because
V
"nXi=1
Mii kvik2 =n�����Z#=
nXi=1
M2iiV[kvik
2 jzi]=n2 = Oas�n�1
�,
whilenXi=1
Xj 6=i
Mijviv0j=n = Op(n
�1K1=2) = op (1)
by Lemma A1 of Chao, Swanson, Hausman, Newey, and Woutersen (2010). �
Proof of Lemma 2. First note that
X 0M (Y �X�0) =pn = V 0M"=
pn+H 0M"=
pn+X 0MG=
pn,
where H 0M"=pn = Op (K
��h) because
Eh H 0M"=
pn 2���Zi = tr (H 0ME[""0jZ]MH) =n � C" tr (H 0MH) =n = O
�K�2�hn
�.
Next,
X 0Mg=pn = V 0MG=
pn+ �X 0MG=
pn = Op
�K��g +
pnK�(�X+�g)
�,
because
Eh V 0MG=pn 2���Zi = G0ME [V V 0jZ]MG=n � CvG0MG=n = Oas �K�2�g
�,
and
H 0MG=pn �
pnpH 0MH=n
pG0MG=n = Oas
�pnK�(�X+�g)
�,
which completes the proof. �
Proof of Lemma 3. Follows from Lemma A2 in Chao, Swanson, Hausman, Newey, and Woutersen
(2010). �
21

Proof of Theorem 1. Follows by standard arguments from Lemmas 1�3. �
Proof of Theorem 2. First, it follows from G0MG=n = op (1) and the Cauchy-Schwarz inequality that
"0"=n = (Y �X�)0M(Y �X�)=n
= (Y �X� �G)0M(Y �X� �G)=n+G0MG=n� 2(Y �X� �G)0MG=n
= (Y �X� �G)0M(Y �X� �G)=n+ op(1),
provided (Y �X� � G)0M(Y �X� � G)=n = Op (1). Next, note that Lemma 1 and � � � = op(1) imply(� � �)0X 0MX(� � �)=n = op (1), which together with the Cauchy-Schwarz inequality gives
(Y �X� �G)0M(Y �X� �G)=n
= "0M"=n+ (� � �)0X 0MX(� � �)=n� 2(Y �X(� � �)�G)0M(� � �)=n
= "0M"=n+ op(1) = ~"0~"=n+ op(1).
Finally, consider the bilinear form
~"0~"=n = "0M"=n =Xi
Mii"2i =n+
Xi
Xj 6=i
"iMij"j=n.
Using jMiij � 1 and the Markov inequality,Xi
Mii"2i =n =
Xi
MiiE�"2i jzi
�=n+ op (1) =
n�Kn
�2 + op(1)
because
E
"V
"Xi
Mii"2i =n
�����Z##= E
"Xi
M2iiV["2i jzi]=n2
#�Xi
E�V["2i jzi]
�=n2 � Cv=n = o (1) ,
while Xi
Xj 6=i
Mij"i"j=n = Op
�n�1K1=2
�= op (1) ,
by Lemma A1 of Chao, Swanson, Hausman, Newey, and Woutersen (2010). Therefore, since (n�K)=(n�K � dx)! 1, �2 = "0"=(n�K � d) = �2 + op(1), which completes the proof. �
Proof of Theorem 3. Apply Theorem 4 with Kg = Kh = K. �
Proof of Theorem 4. First note that " = ~Y � ~X 0� = ~" � ~X 0(� � �) + ~g0, for ~X = (I � Qg)X and
~g = (I �Qg)g. Thus, �n = T1;n + T2;n + T3;n + T4;n + T5;n + T6;n, where
T1;n =1
n
Xi
wi~"2i ~vi~v
0i, T2;n =
1
n
Xi
wi~"2i ~vi (~xi � ~vi)
0 , T3;n =1
n
Xi
wi~"2i (~xi � ~vi) ~v0i,
22

T4;n =1
n
Xi
wi~"2i (~xi � ~vi) (~xi � ~vi)
0 , T5;n =1
n
Xi
wi
�~x0i(� � �) + ~gi
�2~xi~x
0i,
T6;n =1
n
Xi
wi~"i
�~x0i(� � �) + ~gi
�~xi~x
0i,
with ~X = (I �Qh)X = [~x1; � � � ; ~xn]0 and ~V = (I �Qh)V = [~v1; � � � ; ~vn]0.First consider the leading term T1;n. Note that T1;n = T11;n + T12;n + T13;n, where
T1;n =1
n
Xi
wi
0@Xj
M2g;ij"
2j
1A Xk
M2h;ikvkv
0k
!,
T2;n =1
n
Xi
wi
0@Xj
M2g;ij"
2j
1A0@Xk1
Xk2 6=k1
Mh;ik1Mh;ik2vk1v0k2
1A ,T3;n =
1
n
Xi
wi
0@Xj1
Xj2 6=j1
Mg;ij1Mg;ij2"j1"j2
1A0@Xk1;k2
Mh;ik1Mh;ik2vk1v0k2
1A ,with E [T12;njZ] = 0 = E [T13;njZ]. Moreover,
T11;n = E [T11;njZ] + op (1) , E [T11;njZ] =1
n
Xi;j
X`
w`M2g;`iM
2h;`j
!E["2i vjv0j jzi; zj ],
because V[T11;njZ] = oas(1). To see this last result, let a1;ij =P
` w`M2g;`iM
2h;`j and A1;ij = "2i vjv
0j �
E["2i vjv0j jZ], and note after expanding the sums and collecting terms,
V[T11;njZ] =1
n2E
264 Xi;j
aijAij
2�������Z375 � C
n2
Xi;j;k
[aijaik + aikaji + aijajk + aikajk] � Cn�1,
because ������Xi;j;k
aijaik
������ =
������Xi;j;k
X`1
w`1M2g;`1iM
2h;`1j
! X`2
w`2M2g;`2jM
2h;`2k
!������� C
Xi
X`1
M2g;`1i
Xj
M2h;`1j
X`2
M2g;`2j
Xk
M2h;`2k � Cn,
and similarly for the other terms.
Next, T12;n = op (1) because E [T2;njZ] = 0 and E[kT2;nk2 jZ] � Cn�1=2. To see the last conclusion, leta2;ijk = 1 (j 6= k)
P` w`M
2g;`iMh;`jMh;`k and A2;ijk = "2i vjv
0k, and observe that aijk = aikj . Expanding the
23

sums, using the mean-zero property of A2;ijk, and collecting terms gives
E[kT2;nk2 jZ] �C
n2E
264 Xi
Xj 6=i
a2;iji"2i viv
0j
2�������Z375+ C
n2E
264 Xi
Xj 6=i
Xk 6=i;k 6=j
a2;ijkA2;ijk
2�������Z375 .
Now, for the �rst term, de�ne a2;ij = 1 (i 6= j) a2;iji and A2;ij = "2i viv0j , and expanding the sums and
collecting non-mean-zero terms
1
n2E
264 Xi
Xj 6=i
a2;ij"2i viv
0j
2�������Z375 � C
n2
Xi
Xj 6=i[a22;ij + a2;ija2;ji] +
C
n2
Xi
Xj 6=i
Xk 6=i;k 6=j
a2;ika2;jk
� Cn�1 + Cn�1=2,
while for the second term
1
n2E
264 Xi
Xj 6=i
Xk 6=i;k 6=j
a2;ijkA2;ijk
2�������Z375 � C
n2
Xi
Xj 6=i
Xk 6=i;k 6=j
[a2ijk + aijkajik] +C
n2
Xi
Xj 6=i
Xk 6=i;k 6=j
Xl 6=i;l 6=j;l 6=k
aijkaljk
� Cn�1=2 + Cn�1,
where the �nal bounds as a function of n are obtained by properties of the idempotent matrix M as above.
Finally, T3;n = op (1) because E [T3;njZ] = 0 and E[ kT3;nk2 jZ] � Cn�1. To see the last conclusion,
�rst let a3;ij = "i"j and A3;ij = 1 (i 6= j)P
` w`Mg;`iMg;`j
�Pk1
Pk2Mh;`k1Mh;`k2vk1v
0k2
�, and observe that
a3;ij = a3;ji and A3;ij = A3;ji = A03;ij = A03;ji. Then, expanding the sums and collecting non-mean-zero
terms,
E[kT3;nk2 jZ] = E
264 1nXi
Xj
a3;ijA3;ij
2�������Z375 = 2
n2
Xi
Xj
E[a23;ij kA3;ijk2 jZ]
� C
n2
Xi
Xj 6=i
E
24 X`
w`Mg;`iMg;`j
Xk1
Xk2
Mh;`k1Mh;`k2vk1v0k2
! 2������Z35 .
Next, for each (i; j) let a3;ijkl =P
` w`Mg;`iMg;`jMh;`kMh;`l and A3;kl = vkv0l, and note that a3;ijkl =
24

a3;ijlk and A3;kl = A03;lk. Thus, expanding the sums and collecting non-mean-zero terms,
E[kT3;nk2 jZ] � C
n2
Xi
Xj 6=i
E
24 nXk=1
nXl=1
a3;ijklA3;kl
2������Z35
� C
n2
Xi
Xj 6=i
E
24 Xk
a3;ijkkA3;kk
2������Z35+ C
n2
Xi
Xj 6=i
E
264 Xk
Xl 6=k
a3;ijklA3;kl
2�������Z375
� C
n2
Xi
Xj 6=i
Xk
a2ijkk +C
n2
Xi
Xj 6=i
Xk
Xl 6=k
a2ijkl � Cn�1,
where the last inequality follows by properties of the idempotent matrix M as above.
Next, consider the smaller order terms Tk;n, k = 2; � � � ; 6. By ~"i = Mg;ii"i +Pn
j=1;j 6=iMg;ij"j with
E ["ij zi] = 0,E�~"4i��Z� � CX
j
Xk
M2g;ijM
2g;ikE["2j"2kjzj ; zk] � C,
by properties of the idempotent matrix M . Similarly, E[k~vik4jZ] � C. For terms T2;n and T3;n, using
~xi � ~vi =M 0h;iH =M 0
h;i(H � P 0Kh�h), it follows that for k = 2; 3,
E [kTk;nkjZ] � 1
n
Xi
jwijE[~"2i k ~VikjZ] M 0
h;i(H � P 0Kh�h)
� C
n
Xi
Xk
jMh;ikj kh(zk)� pKh(zk)
0�hk � CK1=2h K��h
h ,
by Cauchy-Schwarz inequality, and therefore T2;n = op (1) and T3;n = op (1). Also, by the same arguments,
E [kT4;nkjZ] � C
n
Xi
E�~"2i��Z� M 0
h;i(H � P 0Kh�h) 2
� C
n
Xi
Mh;ii
Xk
kh(zk)� pKh(zk)
0�hk2 � CKhK�2�hh
which implies that T4;n = op (1).
Therefore, it remains to show that T5;n = op(1), which then implies by the Cauchy-Schwarz inequality
that T6;n = op (1). To this end, note that
T5;n =1
n
Xi
wi
�~x0i(� � �) + ~gi
�2~xi~x
0i = Op(n
�1 +KhK�4�hh +K1=2
g K�2�gg + nK1=2
g K�2�gg K
1=2h K�2�h
h ),
25

because, using � � �0 = Op�n�1=2
�, E[k~vik4jZ] � C,
1
n
Xi
jwij k~x0i(� � �0)k2k~xik2 � Ck� � �0k21
n
Xi
k~vik4 + Ck� � �0k21
n
Xi
kM 0h;i(H � P 0Kh
�h)k4
� Op(n�1) +Op(1)
1
n2
Xi
M2h;ii
Xk
kh(zk)� pKh(zk)
0�hk2!2
= Op(n�1 +KhK
�4�hh ),
and
1
n
Xi
jwij j~gij2k~xik2 � C
vuutXi
M2g;ii
Xk
kg(zk)� pKg(zk)0�gk2
!2s1
n2
Xi
k~xik4
� CpKg
Xk
kg(zk)� pKg(zk)
0�gk2!Op(n
�1 +K1=2h K�2�h
h )
= Op(K1=2g K�2�g
g + nK1=2g K�2�g
g K1=2h K�2�h
h ).
This concludes the proof. �
26

ReferencesAngrist, J., G. W. Imbens, and A. Krueger (1999): �Jackknife Instrumental Variables Estimation,�Journal of Applied Econometrics, 14(1), 57�67.
Bekker, P. A. (1994): �Alternative Approximations to the Distributions of Instrumental Variables Esti-
mators,�Econometrica, 62, 657�681.
Cattaneo, M. D., R. K. Crump, and M. Jansson (2010): �Small Bandwidth Asymptotics for Density-Weighted Average Derivatives,�working paper.
Chao, J. C., N. R. Swanson, J. A. Hausman, W. K. Newey, and T. Woutersen (2010): �Asymp-totic Distribution of JIVE in a Heteroskedastic IV Regression with Many Instruments,� forthcoming in
Econometric Theory.
Donald, S. G., and W. K. Newey (1994): �Series Estimation of Semilinear Models,�Journal of Multi-variate Analysis, 50(1), 30�40.
Hansen, C., J. Hausman, and W. K. Newey (2008): �Estimation with Many Instrumental Variables,�Journal of Business and Economic Statistics, 26(4), 398�422.
Kunitomo, N. (1980): �Asymptotic Expansions of the Distributions of Estimators in a Linear Functional
Relationship and Simultaneous Equations,� Journal of the American Statistical Association, 75(371),
693�7000.
Linton, O. (1995): �Second Order Approximation in the Partialy Linear Regression Model,�Econometrica,
63(5), 1079�1112.
Morimune, K. (1983): �Approximate Distributions of k-Class Estimators when the Degree of Overidenti-
�ability is Large Compared with the Sample Size,�Econometrica, 51(3), 821�841.
Newey, W. K. (1997): �Convergence Rates and Asymptotic Normality for Series Estimators,�Journal of
Econometrics, 79, 147�168.
Powell, J. L., J. H. Stock, and T. M. Stoker (1989): �Semiparametric Estimation of Index Coe¢ -cients,�Econometrica, 57(6), 1403�1430.
Robinson, P. M. (1988): �Root-N-Consistent Semiparametric Regression,�Econometrica, 56(4), 931�954.
van der Vaart, A. W. (1998): Asymptotic Statistics. Cambridge University Press, New York.
White, H. (1980): �A Heteroskedasticity-Consistent Covariance Matrix Estimator and a Direct Test for
Heteroskedasticity,�Econometrica, 48(4), 817�838.
27

0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Mo
del
1
Kn
Empirical Coverage
0.95
VH
O1
VH
O2
VH
R1
VH
R2
VC
JN
1
VC
JN
2
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Mo
del
2
Kn
Empirical Coverage
0.95
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Mo
del
3
Kn
Empirical Coverage
0.95
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Mo
del
4
Kn
Empirical Coverage
0.95
Figure1:EmpiricalCoverageRatesfor95%Con�denceIntervals:n=500,S=3;000
28