Embed Size (px)
Citation preview
A nonlinear truss finite element with varying stiffness
R. Ďuriš a,*, J. Murín b
a Department of Applied Mechanics, Faculty of Materials Science and Technology in Trnava, Slovak University of Technology in Brati-slava, Paulínska 16, 917 24 Trnava, Slovak Republic
b Department of Mechanics, Faculty of Electrical Engineering and Information Technology, Slovak University of Technology, Ilkovičova 3, 812 19 Bratislava, Slovak Republic
Received 10 September 2007; received in revised form 9 October 2007
Abstract
This contribution deals with a new truss element with varying stiffness intended to geometric and physically non-linear analysis of composite structures. We present a two-node straight composite truss finite element derived by new nonincremental full geometric nonlinear approach. Stiffness matrix of this composite truss contains transfer constants, which accurately describe the polynomial longitudinal variation of cross-section area and material properties. These variations could be caused by nonhomogenous temperature field or by varying components volume fractions of the composite or/and functionally graded materials (FGM´s). Numerical examples were solved to verify the established relations. The accuracy of the new proposed finite truss element are compared and discused. © 2007 University of West Bohemia. All rights reserved.
Keywords: geometric nonlinearity, plasticity, truss finite element, varying stiffness, functionally graded material
1. Introduction The composite structures (e.g. laminate, sandwich structures, or FGM´s) are often used in many
applications. Their FE analyses require creating very fine mesh of elements even for relatively small sized bodies, what increases computational time, particularly in nonlinear analyses. Usually, the analysis of composite bar structures can be performed using the truss or beam elements with con-stant „average“ cross-sectional area and Young modulus. Sufficient accuracy can achieved by incre-asing the number of integration points in the assembled stiffness matrix, with refining the mesh, and by choosing of elements with higher order interpolation polynomials. In addition, the linearisation of the nonlinear expressions is the reason for increasing solution inaccuracy. The main aim of this paper is to present new more effective truss element with continuous variation of the stiffness along its axis suitable for the solution of geometric and physical nonlinear problems. The nonincremental nonlinearised Lagrangian formulation of the nonlinear FEM-equations will be used to avoid inaccu-racy caused by the linearisation of the Green-Lagrange strain tensor increment. A new shape functi-ons of a truss element [3,4] have been used to overcome the problems associated with using an ina-ccurate description of stiffness variation along the element length.
2. Basic equations 2.1. New shape functions for a truss element with varying stiffness
To avoid element size influence on the accuracy of the results, we will first describe new shape functions for the truss element with varying stiffness and then we will use these shape functions for the expresion of the axial displacement in stiffness matrix derivation of the non-
*Corresponding author. Tel.: +420 33 55 11 601, e-mail: [email protected].
Applied and Computational Mechanics 1 (2007) 417 - 426
417
R. Ďuriš et al. / Applied and Computational Mechanics X (YYYY) 123-456
linear truss element satisfying equilibrium conditions both locally and globally. It can be as-sumed that the variation of the parameters defining the cross-section area A(x) can be then ex-pressed in following polynomial form
)(1)(1
xAxAxA Ai
p
k
kAki η=
η+= ∑
=. (1)
Young modulus E(x) is defined similarly
)(1)(1
xExExE Ei
q
k
kEki η=
η+= ∑
=. (2)
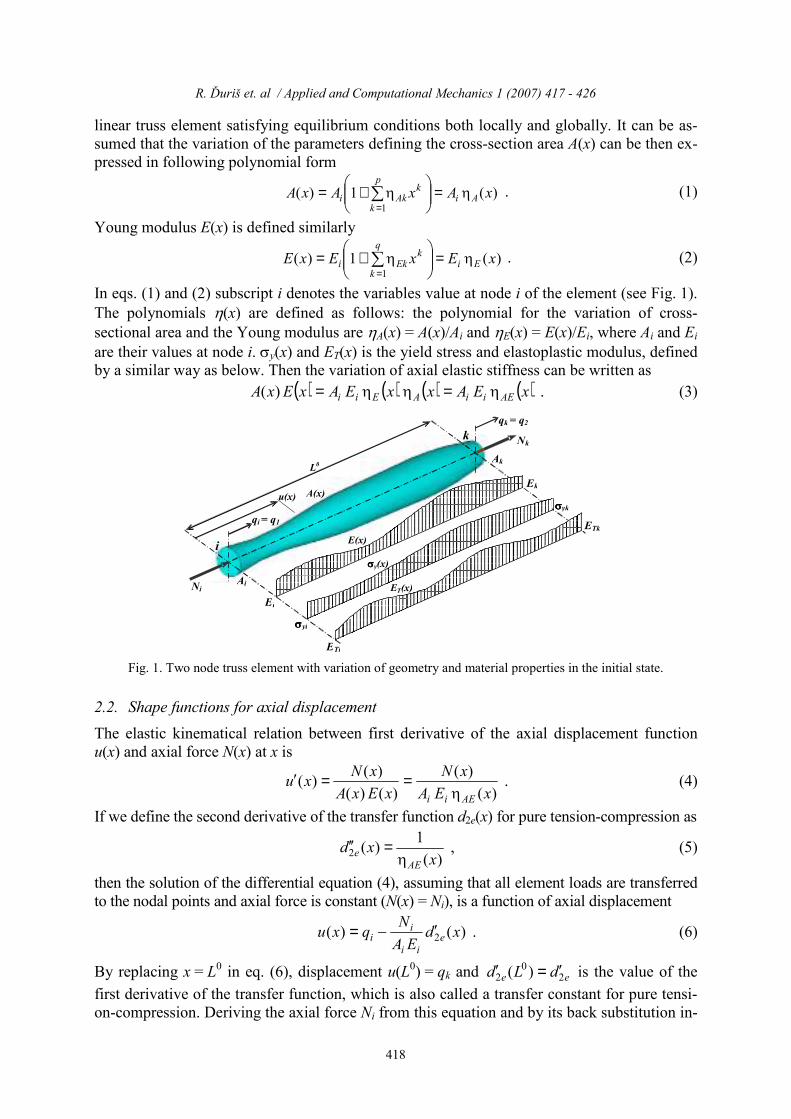
In eqs. (1) and (2) subscript i denotes the variables value at node i of the element (see Fig. 1). The polynomials η(x) are defined as follows: the polynomial for the variation of cross-sectional area and the Young modulus are ηA(x) = A(x)/Ai and ηE(x) = E(x)/Ei, where Ai and Eiare their values at node i. σy(x) and ET(x) is the yield stress and elastoplastic modulus, defined by a similar way as below. Then the variation of axial elastic stiffness can be written as ( ) ( ) ( ) ( )xEAxxEAxExA AEiiAEii η=ηη=)( . (3)
i
k
Ei
E(x)
A(x)
σσσσy(x)
ET(x)
σσσσyi
ETi
Ek
σσσσyk
ETk
L0
Ni
Nk
Ai
Ak
u(x)
qi = q1
qk = q2
Fig. 1. Two node truss element with variation of geometry and material properties in the initial state. 2.2. Shape functions for axial displacement The elastic kinematical relation between first derivative of the axial displacement function u(x) and axial force N(x) at x is
)(
)()()(
)()(xEA
xNxExA
xNxuAEii η
==′ . (4)
If we define the second derivative of the transfer function d2e(x) for pure tension-compression as
)(
1)(2 xxd
AEe η
=′′ , (5)
then the solution of the differential equation (4), assuming that all element loads are transferred to the nodal points and axial force is constant (N(x) = Ni), is a function of axial displacement
)()( 2 xdEA
Nqxu eii
ii ′−= . (6)
By replacing x = L0 in eq. (6), displacement u(L0) = qk and ee dLd 20
2 )( ′=′ is the value of the first derivative of the transfer function, which is also called a transfer constant for pure tensi-on-compression. Deriving the axial force Ni from this equation and by its back substitution in-
R. Ďuriš et. al / Applied and Computational Mechanics 1 (2007) 417 - 426
418

R. Ďuriš et al. / Applied and Computational Mechanics X (YYYY) 123-456
to eq. (6) the expression relating the axial displacement of an arbitrary point x and the axial displacements of nodal points i and k becomes,
kukiuike
ei
e
e qxqxqd
xdqd
xdxu )()()()(1)(2
2
2
2 φ+φ=′
′+
′
′−= . (7)
Then, the shape functions of the first (i = 1) and second (k = 2) nodal points for two node truss element (first index u = 1 determines the local displacement direction) are defined as
e
euk
e
eui d
xdxxd
xdxx2
212
2
211
)()()(,)(1)()(′
′=φ=φ
′′
−=φ=φ . (8)
The evaluation of the transfer constants for tension-compression is performed using a simple numerical algorithm published in [1,2,3]. For a constant stiffness, xxd e =′ )(2 and 0
2 Ld e =′ and eq. (7) leads to the standard shape functions for the truss element. The first derivatives required for the stiffness matrices (see later eqs. 14-17) are
e
e
e
e
dxdx
dxdx
2
21,12
2
21,11
)()(,)()(′
′′=φ
′′′
−=φ . (9)
2.3. Nonincremental geometric nonlinear FEM equations without linearisation With the objective to minimize negative influence of commonly used linearisation of in-
cremental equations to derive stiffness matrices we will use a new nonincremental formulati-on without any linearisation [1,4]. From the principle of virtual work, kki
Aiij
Vij qFdAuFdVES δ+δ=δ ∫∫
r
00(10a)
the general nonlinear equation can be derived in the current configuration in nonincremental form as kki
Ai
Vijklijklijklijklij
Vklijkl qFdAuFdVeeCdVeeC δ+δ=δηη+δη+δη+δ ∫∫∫
r
000)( , (10b)
where Cijkl is a tensor of material properties defining constitutive relation of second Piola-Kirchhoff stress tensor Sij and Green-Lagrange deformation tensor Eij = eij + ηij, where
)( ,,21
ijjiij uue += and jkikij uu ,,21=η is its linear and nonlinear part, respectively. Further, ui,j is
the current displacement gradient, Fi are the surface tractions ( iuδ is the variation of displace-
ment field), and δqk are virtual displacements of points of application of kFr
. Integration is per-formed through the initial (undeformed) volume V0 and initial area A0 of a finite element. Let the unknown displacement field of the element be ui = φik qk, where φik are the shape functions and qk are the nodal displacement components. By substituting these relations into eq. (10b) and after necessary modifications, we obtain the following equation
.
21)(
21
)(41))((
41
0
00
00
,,,,,,,,
,,,,,,,,
nA
ini
Vqvmjrnirqlpvkpmijkl
Vrmklmlkmjpniprijkl
Vrmijnjinlprkpmijkl
Vmijnjinklmlkmijkl
FdAF
dVqqqCdVqqC
dVqqCdVqC
r+φ=
φφφφ+φ+φφφ
+φ+φφφ+φ+φφ+φ
∫
∫∫
∫∫
(11)
Equation (11) can be rewritten in a simpler form Knm qm = Fn or in matrix notation K(q) q = F , (12) where Knm are the components of local nonlinear stiffness matrix K(q), qm are the components of nodal displacement vector q, and Fn are the components of external loading vector F at nodal
R. Ďuriš et. al / Applied and Computational Mechanics 1 (2007) 417 - 426
419

R. Ďuriš et al. / Applied and Computational Mechanics X (YYYY) 123-456
points. The local nonlinear stiffness matrix consists of one linear and three nonlinear parts )()()()()( 321 qKKKKKKqK NLLNLNLNLL qqq +=+++= . (13) The components of linear stiffness matrix KL can be derived from the first integral of eq. (11)
∫ ++=0
))((41
,,,,V
ijnjinklmlkmijklLnm dVCK φφφφ . (14)
Equation (14) corresponds to the classical linear stiffness matrix from the linear FEM theory. The three nonlinear stiffness matrices KNL1, KNL2 and KNL3 contains following components
∫ +=0
)(41
,,,,1
Vrijnjinlprkpmijkl
NLnm dVqCK φφφφ , (15)
∫ +=0
)(21
,,,,2
Vrklmlkmjpniprijkl
NLnm dVqCK φφφφ , (16)
∫=0
,,,,3
21
Vqvjrnirqlpvkpmijkl
NLnm dVqqCK φφφφ . (17)
The nonlinear system of equations is solved by an iterative method. To ensure the quadra-tic convergence of the solution (e.g. in the Newton-Rhapson iteration scheme), the tangent stiffness matrix for the element needs to be assembled according to the expression
)()()()( qKKqqqKqK
qFqK NLTL
T +=∂
∂+=∂∂= , (18)
where KNLT(q) is the nonlinear part of tangent stiffness matrix KT(q) [5]. 2.4. Geometrically nonlinear local stiffness matrix of the truss element for linear elastic analysis
Substituting (9) into eqs. (14-17) and for dV = A(x)dx = AiηA(x)dx, where the tensor of elasticity is Cijkl ≡ E(x), we obtain linear and three nonlinear stiffness matrices of the truss element. For the local coordinate system of the truss element the free indices m, n are 1 and 2, re-spectively. The linear stiffness matrix of the truss element with varying stiffness has the form
−
−′
=1111
2e
iiL
dEAK . (19)
The first, second and third nonlinear stiffness matrices have then the form of
ee
iiNL dqqd
EAq 21232
1 )(1111
)(21)( −
−
−′
=K , (20)
ee
iiNL dqqd
EAq 21232
2 )(1111
)()( −
−
−′
=K , (21)
ee
iiNL dqqd
EAq 22
1242
3 )(1111
)(21)( −
−
−′
=K . (22)
Equations (15) and (16) leads to the integral ∫ ′′0
22 ))((
Le dxxd . Expression (17) contains the integral
∫ ′′0
32 ))((
Le dxxd . Substituting the integrant by eq. (5) and rewriting )())(( 2 xx AEAE ηη = and
)())(( 3 xx AEAE ηη = yields eL
e ddxxd 22
20
))(( =′′∫ and eL
e ddxxd 23
20
))(( =′′∫ . These are the new transfer
constants of the truss element, since )(xEAη and )(xEAη are again polynomials. These transfer con-
R. Ďuriš et. al / Applied and Computational Mechanics 1 (2007) 417 - 426
420

R. Ďuriš et al. / Applied and Computational Mechanics X (YYYY) 123-456
stants can be computed by using simple numerical algorithm mentioned above. The final local non-linear stiffness matrix of the truss element, with varying stiffness, can be then written in the form
−
−
′−+
′−+=
−
−+=
1111
)()(
21
)()(
231
1111
)()( 32
22122
2
212
e
e
e
eLe
NLe
Le d
dqqddqqkkkqK , (23)
where the linear part of truss element stiffness is
e
iiLe d
EAk2′
= . (24)
The matrix form of the local equation of equilibrium is then given by eq. (12), where K(q) is defined by (11), the vector of nodal displacements is q = [q1 q2]T and F is the vector of ex-ternal local nodal forces. 2.5. Local nonlinear tangent stiffness matrix The tangent stiffness matrix is defined by eq. (18) where the matrix K(q) is defined by ex-pression (23). After the indicated differentiation, we obtain the tangent stiffness matrix of the truss element, with varying stiffness, in the form
−
−+=
1111
)()( NLTe
LeT kkqK , (25)
where the nonlinear tangent stiffness keNLT is expressed as the following
′−+
′−= 3
2
22122
2
212 )(
)(23
)()(3
e
e
e
eLe
NLTe d
dqqddqqkk . (26)
2.6. Global nonlinear stiffness matrix Since the local nonlinear tangent stiffness matrix (25) is not invariant to rigid body motion, it is not possible to use the conventional transformation, known from the linear theory. If the lo-cal displacements are substituted with the invariant stretching
012
00 11L
qqLL
LL −+=∆+==λ (27)
we obtain the invariant nonlinear tangent stiffness in the form
′−+
′−= 3
2
22022
2
20
)()()1(
23
)()1(3
e
e
e
eLe
NLTe d
dLddLkk λλ . (28)
Using invariant nonlinear tangent stiffness (28) in the local tangent stiffness matrix (25), the global nonlinear tangent stiffness matrix G
TK can be expressed in classical form as TqKTK )(T
TGT = . Matrix T is transformation matrix for the truss in plane and has the form
=
αααα
sincos0000sincos
T , (29)
where α is the angle determining the location of local axis in current configuration (current nodal coordinates and current truss length L), i.e. cosα = (xk - xi)/L and sinα = (yk - yi)/L .2.7. Internal forces
To overcome problems with transformation of internal forces from local to global coordinate system, we rewrite nonlinear stiffness matrix (23) using stretching parameter (27) to the form
R. Ďuriš et. al / Applied and Computational Mechanics 1 (2007) 417 - 426
421

R. Ďuriš et al. / Applied and Computational Mechanics X (YYYY) 123-456
−
−=
−
−
′−λ+
′−λ+
′=
1111
1111
)()()1(
21
)()1(
231)( 3
2
22022
2
20
2e
e
e
e
e
e
ii kddL
ddL
dEAqK . (30)
where NLe
Lee kkk += . Then local internal axial forces can be calculated by
[ ] kNLe
Lei NLkkN −=−+−= 0)1(λ . (31)
Using invariant stretching the previous equation can be rewritten into
03
2
22022
2
20
2)1(
)()()1(
21
)()1(
231 L
ddL
ddL
dEAN
e
e
e
e
e
iii −
′−+
′−+
′−= λλλ . (32)
In the solution process the vector of global internal forces has to be calculated. Global internal forces are calculated through the internal axial force (32) and transformation matrix T .
2.8. Nonincremental FEM equations for geometric and physically nonlinear analysis In this contribution only bilinear stress-strain relation is considered (Fig. 2) with isotropic
and kinematic hardening. In the following derivation we use decomposition of axial strain ε = εσy + εep due to nonincremental solution. If another constitutive law of stress-strain rela-tionship or cyclic loading will be considered, incremental formulation and traditional decom-position of strain ε = εe + εp and plastic modulus H(x) are needed.
The cross-sectional area A(x) and elasticity modulus E(x) are defined using eqs. (1) and (2). The elastoplasticity modulus ET(x) is defined by similar expresion
( )
+= ∑
=
r
k
kkETiT xExE
T1
1 η . (33)
Then the variation of axial elastoplastic stiffness can be written as ( ) ( ) ( ) ( )xEAxxEAxExA
TT AETiiEATiiT ηηη ==)( . (34)
If the axial stress exceeds the yield stress σy, it is neccesary to establish new relationship be-tween the stress increment and the strain in the bar.
εep εσy
σ
ε
E
σyσep
ET
σL0
F
uy
A(x), E(x), ET(x),σ y(x)
α0x
α0 = 10°L0 = 1 m
Fig. 2. One-dimensional bilinear stress-strain relationship with hardening.
Fig. 3. Von Mises structure with varying stiffness: geometry and restrictions.
If plasticity condition in the bar is reached, it is sufficient to change the linear elastic term kein eq. (30) to the elastoplastic term kep
′′
−+′′
−+′
= 32
22022
2
20
2 )()()(
21
)()(
231
ep
ep
ep
ep
ep
Tiiep d
dL
dd
Ld
EAkyy σσ λλλλ , (35)
R. Ďuriš et. al / Applied and Computational Mechanics 1 (2007) 417 - 426
422

R. Ďuriš et al. / Applied and Computational Mechanics X (YYYY) 123-456
where yσλ is the bar stretching when yield stress is reached, epepep ddd 222 ,, ′′′ are the transfer
constants for elastoplastic loading case. These transfer constants have a similar meaning as the transfer constants in elastic loading state, but they are callculated from second derivative
of transfer function )(
1)(2 xxd
TAEep η
=′′ .
The internal force before yield stress in the bar element can be calculated using formulae (32) and with the stress in the bar beyond the elastic limit, elastoplastic part of internal force can be calculated from
03
2
22022
2
20
2)(
)()()(
21
)()(
231 L
dd
Ldd
Ld
EANyyy
ep
ep
ep
ep
ep
Tiiiep σσσ λλλλλλ −
′
′−+
′
′−+
′−= . (36)
Axial stress in elastoplastic domain can be calculated from
aver
iepy A
N+=σσ , (37)
where σy is an “average” value of the yield stress function of the bar and Aaver is an “ave-rage” value of the function describing the bar cross-sectional area. In the elastic state stiffness matrix KT (q) is expressed by (25) in the form
( ) ( )
−
−
′′
−+′′
−+′
= 1111
)()(1
23
)(131 3
2
22022
2
20
2 e
e
e
e
e
eiiTe d
dLddL
dEA λλK . (38)
In the elastoplastic state it changes to form
−
−
′′
−+′′
−+′
= 1111
)()()(
23
)()(31 3
2
22022
2
20
2 ep
ep
ep
ep
ep
TiiTep d
dL
dd
Ld
EAyy σσ λλλλK . (39)
3. Numerical experiment – von Mises structure using trusses with varying stiffness
For examining the accuracy of the presented truss element, two numerical examples were solved. Three different types of variability of cross-sectional area and material properties were caried out. Modification of the stiffness polynomial order was considered, but ratio of maxi-mum/minimum stiffness along the bar remained constant: (A(x)E(x))max/(A(x)E(x))min = 2.0 (see Fig. 5). In the first example only linear elastic material response was considered. In the second example, were carried out for bilinear elastoplastic material behaviour with isotropic as well as kinematic hardening. A typical example of the geometric nonlinear behaviour is the von Mises structure (Fig. 3). The dependence displacement vs. internal/global force for linear elastic solu-tion of the bar with uniform cross-section is well known from literature (thin solid line in Figs. 4c and 4d). For elastoplastic behaviour this dependence is shown in this figure and comparison with the linear elastic solution is presented.
To use our new nonlinear truss element for a practical calculation a code in MATHEMATICA software was developed. To compare these results with the results obtained by ANSYS two different models was used:
- one dimensional model divided into 1 and 20 tapered beam elements, - solid model meshed to 2400 brick elements grouped to 50 segments with average values of ma-
terial properties in corresponding segment. The geometry of this solid model was carefully treated to approximate the variable shape of the cross-section as it was possible.
Variation of the cross-section area and material properties were considered in accordance with Tab.1.
R. Ďuriš et. al / Applied and Computational Mechanics 1 (2007) 417 - 426
423

R. Ďuriš et al. / Applied and Computational Mechanics X (YYYY) 123-456
ab
c
d
F
uy
αx
y
a)
2σmax a
bc
di
σy
σmax
E
ET
σ
ε2σy
dk
isotropic
kinematic
b)
glob
alre
actio
n
kinematic
isotropic
elastic
uy
di
dk
ca
b
F
c)
di
c kinematic
isotropic
elastic
dk
ab uy
N
axia
lfor
ce
d) Fig. 4. Equilibrium path for linear elastic and bilinear elastoplastic material properties with isotropic and kinema-
tic hardening of von Mises two bar structure.
stiffness function
variation of geometry and material properties [m2, Pa]
AE1
A1(x) = 0.0045 – 0.002xE1(x) = 2×1011 – 0.2×1011xE1T(x) = 2×1010 – 0.2×1010xσ1y(x) = 200×106 – 40×106x
AE2
A2(x) = 0.0045 – 0.003x + 0.001x2
E2(x) = 2×1011 – 0.2×1011xE2T(x) = 2×1010 – 0.2×1010xσ2y(x) = 200×106 – 40×106x
AE3
A3(x) = 0.0045 – 0.003x + 0.001x2
E3(x) = 2×1011 – 0.3×1011x + 0.1×1011x2
E3T(x) = 2×1010 – 0.3×1010x + 0.1×1010x2
σ3y(x) = 200×106 – 30×106x – 10×106x2
0.2 0.4 0.6 0.8 1
5´ 108
6´ 108
7´ 108
8´ 108
9´ 108
4 × 10 8
element lenght L0 [m]
0
varia
tion
ofst
iffne
ssA(
x)E(
x)[N
]
AE1
AE2
AE3
Fig. 5. Stiffness variation curves of the bar.
Tab. 1. Combinations of geometric and material properties.
Example 1 In the first example our new element with ANSYS solutions were compared. In these experiments three different variations of elastic bar stiffness Be(x) = A(x) E(x) (Tab. 1) were used.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
- 1 ´ 107
- 8 ´ 106
- 6 ´ 106
- 4 ´ 106
- 2 ´ 106
0
displacement uy [m]
axia
lfor
ceN
[N]
our new 1 element ANSYS 1 beam element ANSYS 20 beam elements ANSYS solid solution
Fig. 6. Axial force – common hinge displacement response for elastic stiffness variation AE3.
R. Ďuriš et. al / Applied and Computational Mechanics 1 (2007) 417 - 426
424

R. Ďuriš et al. / Applied and Computational Mechanics X (YYYY) 123-456
axial force N
beamANSYS
beamANSYSbarnew
1
)1( −
beamsANSYS
beamsANSYSbarnew
20
)20( −
solidANSYS
solidANSYSbarnew )( −
AE1 0.91 0.26 2.27 AE2 1.04 5.18 2.28 AE3 0.19 5.68 1.60
global reaction F
beamANSYS
beamANSYSbarnew
1
)1( −
beamsANSYS
beamsANSYSbarnew
20
)20( −
solidANSYS
solidANSYSbarnew )( −
AE1 3.77 2.37 6.04 AE2 3.89 2.65 6.03 AE3 2.87 3.66 5.00
Tab. 2. Absolute percentage difference between new bar analysis to ANSYS solutions [%]. Example 2 In the second example our new element with ANSYS solutions were compared. In these experi-ments three different variations of elastic and elastoplastic bar stiffness Be(x) = A(x) E(x) and Bep(x) = A(x) ET(x) (Tab. 1) were considered.
0 0.05 0.1 0.15 0.2 0.25 0.3
- 1.5 ´ 106
- 1 ´ 106
- 500000
0
500000
1 ´ 106
1.5 ´ 106
2 ´ 106
displacement uy [m]
axia
lfor
ceN
[N]
our new 1 element
ANSYS 1 beam element
ANSYS 20 beam elements
ANSYS solid solution
Fig. 7. Axial force – common hinge displacement response for stiffness variation AE3 – isotropic hardening.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
- 1.5 ´ 106
- 1 ´ 106
- 500000
0
500000
displacement uy [m]
axia
lfor
ceN
[N]
our new 1 element
ANSYS 1 beam element
ANSYS 20 beam elements
ANSYS solid solution
Fig. 8. Axial force – common hinge displacement response for stiffness variation AE3 – kinematic hardening. Resulting dependence of both the axial force N on displacement uy at the common node are given in previous graphs. Only selected responses of axial force-displacement of common node
R. Ďuriš et. al / Applied and Computational Mechanics 1 (2007) 417 - 426
425

R. Ďuriš et al. / Applied and Computational Mechanics X (YYYY) 123-456
are presented in figures due to similarity. In Fig. 6 the of axial forces for elastic variations of stiffness AE3 (Example 1) of our new truss element and ANSYS model are compared. In Tab. 2 absolute percentage differences between new bar analysis to ANSYS solutions are presented. Results obtained from numerical experiments with elastoplastic stiffness variation denoted AE3 (Example 2) are shown in Figures 7 and 8. These graphs show response of internal force for bilinear material behavior. Figure 8 shows considerable differences for kinematic harde-ning between our solution and the ANSYS in neighbourhood of yield stress (compressive and tensile). This effect is due to fluctuating of longitudinal material properties defined in ANSYS solid model. The results of numerical analyses lead to the following conclusions:
- absolute percentage difference between the new truss element and ANSYS solution for all considered stiffness variations in elastic analysis was less then 6% for elastic loading state,
- the numerical experiments shows good agreement between the solutions of our truss ele-ment and ANSYS results by consideration of isotropic hardening, especially,
- increasing of ratio Bmax/Bmin influences also enlargement of differences between our new truss element and ANSYS solutions,
- considerable differences appears only for cases with kinematic hardening. This can be ex-plained by using „average value“ σy to detect elastic limit in entire new truss element,
- the differences of new truss element and ANSYS models results increase with the ratio AEmax/AEmin, particularly near the yield stress,
- if stiffness ratio Bmax/Bmin is higher then three, results obtained with the new element are not ac-ceptable for application in praxis and other solution have to be used for a such truss analysis.
4. Conclusion A geometric and physically nonlinear truss finite element of composite material with con-
tinuous longitudinal stiffness variation is presented in this contribution. Continuous polyno-mial variation of cross-sectional area along the element has been assumed. Variation of these geometric and material parameters is described very accurate using concept of transfer functi-ons and transfer constants.
The stiffness matrices of this finite element are derived using the full nonlinear non-incremental total Lagrangian formulation without any linearisation. The effective longitudinal material properties are calculated with the extended mixture rule. The results of numerical expe-riments showed high effectiveness and suitable accuracy of the new composite truss finite ele-ment. This new element fulfils the all element equations in both the global and local sense.
Acknowledgement This work has been conducted within the grants No. 1/4122/07 and 1/2076/05 of the Slovak VEGA Grant agency. This support is gratefully acknowledged.
References [1] V. Kutiš, Beam element with variation of cross-section, which satisfies all local and global equilibrium condi-
tions, Ph.D. Thesis, Department of Mechanics, FEI, Slovak University of Technology, Bratislava, 2001. [2] V. Kutiš, J. Murín, NelinPrut – an internal FEM program, Department of Mechanics, FEI, Slovak Universi-
ty of Technology, Bratislava, 2003. [3] J. Murín, V. Kutiš, 3D-beam element with continuous variation of the cross-sectional area, Computers &
Structures, No. 80(3-4), 2002, pp. 329-338. [4] J. Murín, M. Aminbaghai, Vergleichsberechnungen im Rahmen der Th. II. Ordnung mit Programmen IQ-
100 and ANSYS, Proceedings of Strojné inžinierstvo 99, STU Bratislava, 1999. [5] J. Murín, V. Kutiš, Solution of non-incremental FEM equations for nonlinear continuum, Strojnícky časo-
pis, No. 52(6), 2001, pp. 360-371.
R. Ďuriš et. al / Applied and Computational Mechanics 1 (2007) 417 - 426
426





























