Embed Size (px)
Citation preview

Research ArticleA New Approach to Achieve Variable Negative Stiffness byUsing an Electromagnetic Asymmetric Tooth Structure
Chao Han 1 Xueguang Liu 1 MuyunWu 1 andWeilong Liang 2
1College of Power and Energy Engineering Harbin Engineering University Harbin 150001 China2Powertrain Global RampD Center Changan Automobile Co Ltd Chongqing 400000 China
Correspondence should be addressed to Xueguang Liu liuxueguang2014hotmailcom
Received 5 December 2017 Revised 18 April 2018 Accepted 30 April 2018 Published 30 May 2018
Academic Editor Mahmoud Bayat
Copyright copy 2018 Chao Han et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Traditional passive nonlinear isolators have been paid much attention in recent literatures due to their excellent performancecompared to linear vibration isolators However they are incapable of dealing with varying conditions such as changing excitationfrequency due to the nonadjustable negative stiffness To solve this drawback a new approach to achieve variable negative stiffnessis proposed in this paper The negative stiffness is realized by an electromagnetic asymmetric magnetic tooth structure and canbe changed by adjusting the magnitude of the input direct current Analytical model of the electromagnetic force is built andsimulations of magnetic field are conducted to validate the negative stiffnessThen the EATS is applied to vibration isolation and anelectromagnetic vibration isolator is designed Finally a series of tests are conducted tomeasure the negative stiffness experimentallyand confirm the effect of the EATS in vibration isolation
1 Introduction
Nonlinear passive isolators with high-static-low-dynamicstiffness characteristic generally achieved by combining apositive stiffness spring and a negative stiffness springs havereceived considerable attention in the past twenty years dueto their excellent performance compared to linear vibrationisolators [1ndash4] Negative stiffness plays an important role inhigh-static-low-dynamic stiffness system and can be achievedby a number of ways However most of them are passivemechanism whose negative stiffness cannot be adjustedFor example a common way to obtain negative stiffness inthe research papers [5 6] is using two oblique mechanicalcoil springs With these two precompressed coil springs anegative stiffness can be got in vertical direction but cannotbe adjusted as there is no adjustment mechanism A similarnegative stiffness device realized by using the mechanical coilspring was presented byMeng et al [7] Besides another wayto achieve negative stiffness is utilizing structure bucklingphenomena In the paper given by Platus [8] the stiffnessof a beam subjected to an axial load showed negativecharacteristic Similarly the studies in [9 10] showed thatthe negative stiffness mechanism can be designed by using
compressed Euler bulked beams An impressive method torealize negative stiffness using cam-roller-spring mechanismcan be found in [11 12] Furthermore permanent magnetscan also be utilized to obtain negative stiffness The negativestiffness mechanism presented in [13] was conducted byusing three permanent magnets arranged in an attractingconfiguration In addition another two types of negativestiffness mechanism made by permanent magnets can befound in [14 15] In the paper presented by Meng et al[16] a negative stiffness spring was proposed by using disksprings whose force characteristic in vertical direction wassimilar to that of the two oblique springs mechanism Manyother different types of passive nonlinear isolators have beendiscussed and compared comprehensively by Ibrahim in hisreview paper [17]
In general passive nonlinear isolators are incapable ofdealing with varying conditions such as changes of excitationfrequencies or other system parameters One common wayto adjust the nonlinear isolatorrsquos properties is to changeits stiffness The positive stiffness variation has been wellstudied in many papers and a lot of configurations havebeen proposed while the negative stiffness variation is notTo the best of our knowledge the design and study of
HindawiShock and VibrationVolume 2018 Article ID 7476387 11 pageshttpsdoiorg10115520187476387
2 Shock and Vibration
variable negative stiffness are rarely reported Only two wayshave been found so far to realize variable negative stiffnessutilization of electromagnets [18ndash20] and application ofactuator [21] Zhou and Liu [18] and Francisco Ledezma-Ramirez et al [19 20] have presented a series of papersin which the negative stiffness is obtained by using twoelectromagnets and one (or two) permanent magnet Itworks like the mechanism proposed by [13] but the negativestiffness can be changed by adjusting the input currentHowever the characteristic of the magnet is very sensitive tothe temperature and the demagnetization phenomenon willoccur at high temperature Thus the isolator with magnetsis not suitable for vibration isolation at high temperatureUnlike the way of using the electromagnets Xu and Sun[21] proposed a theoretical model with adjustable negativestiffness by applying actuators to the traditional negativestiffness mechanism shown in [5 6] to change the prestressedlength of oblique springs However this regulating mode ofthe negative stiffnessmay be not very suitable for the practicalapplication due to the empty trip phenomenon
Although twoways have been proposed to realize variablenegative stiffness it is still too few for future application ofvariable negative stiffness and some new approaches shouldbe studied In this paper a new approach is developed toachieve variable negative stiffness and applied in vibrationisolation The variable negative stiffness is created by anelectromagnetic asymmetric tooth structure (EATS) and canbe changed by adjusting the magnitude of the direct currentNo magnet is used in the design so that the influence of thetemperature on the effectiveness of the negative stiffness isvery smallThemagnitude of the negative stiffness is adjustedby the current thus no auxiliary regulating mechanism isneeded It is not the intention here to address the advantageof the designed isolator compared with those impressingisolators proposed by [18ndash21] or how low frequency thedesigned isolator can work in Rather the intention is to showa new way to achieve variable negative stiffness and validateit by simulation calculations and experimental tests
The paper is organized as follows Firstly an electro-magnetic vibration isolator is designed in Section 2 Theelectromagnetic force with negative stiffness is modeled the-oretically and validated by finite element software Secondlyin Section 3 the EATS is applied to vibration isolation andan electromagnetic vibration isolator is proposed Thirdlythe experimental rig is built and the dynamic responses ofthe isolator in sweep and single frequencies are measured inSection 4 Finally the conclusion is given in Section 5
2 Configuration Model andSimulation of the EATS
21 Basic Configuration of the EATS The idea of electro-magnetic asymmetric tooth structure comes from the designof the traditional electromagnetic tooth structure (TETS)also called electromagnetic spring which has been usedin vibration absorption [22] The axisymmetric schematicdiagramof theTETS is shown in Figure 1(a) inwhich the bluearrows denote the magnetic lines The stator and the active
(b)(a)
Coil
Active cell
Stator
Figure 1 Axisymmetric schemes of (a) the traditional toothstructure and (b) the asymmetric tooth structure
cell are made by electrical iron that has high permeabilityThe number of the active cell teeth is equal to that of thestator and all the teeth are arranged symmetricallyThere willbe a closed magnetic circuit existing in the tooth structureand all the magnetic lines from one active cell tooth flowinto the opposite stator tooth when a constant direct currentpasses through the coil If the active cell moves away fromthe stator in vertical direction an electromagnetic force willbe generated between tooth pairs to prevent this movementThus the system behaves like a mechanical spring and has apositive stiffness near the equilibrium position
Figure 1(b) shows the axisymmetric schematic diagram ofthe EATS Different to the TETS the number of the statorsis two larger than that of the active cell and every activecell tooth is arranged between two stator teeth Thus themagnetic lines from one active cell tooth flow into two statorteeth and one active cell is applied by two electromagneticforces in opposite directions When the active cell stays atthe equilibrium position the overall electromagnetic forceis zero and the system is quasi-stable However if the activecell moves away from the equilibrium position there willbe an electromagnetic force generated between the activecell and the stator to strengthen this movement and thesystem becomes unstable Thus the system behaves like anelectromagnetic spring with negative stiffness
22 Analytical Model of the Electromagnetic Force of the EAST
221 Equivalent Magnetic Circuit Model It can be seen fromFigure 1 that the EAST consists of four active cell teeth andsix stator teeth which means that eight tooth pairs shouldbe considered in magnetic circuit modeling In general themagnetic resistance of the air gap is much larger than thatof the magnetizer which is made by electrical iron thus themagnetic resistance of the active cell and stator is neglected intheoretical modeling Figure 2 shows the equivalentmagneticcircuit of EATS where Λ is the magnetic conductance of theair gap andΦ is the corresponding magnetic flux
Shock and Vibration 3
For one of the air gaps which is numbered 1 themagneticcoenergy is
1198821 = 12 1198731198682 Φ1 = (119873119868)2 Λ 18 (1)
where119873 is the turns of the coil and 119868 is the magnitude of thecoil current
The electromagnetic force can be derived by using virtualwork principle
1198651 = minus1205971198821120597119909 = minus(119873119868)28 120597Λ 1120597119909 (2)
where 119909 is the relative displacement between the active celland the stator
Therefore the overall electromagnetic magnetic force is
119865 = minus2(1205971198821120597119909 minus 1205971198822120597119909 + 1205971198823120597119909 minus 1205971198824120597119909 )= minus(119873119868)24 (120597Λ 1120597119909 minus 120597Λ 2120597119909 + 120597Λ 3120597119909 minus 120597Λ 4120597119909 )
(3)
222 Axial Electromagnetic Force of the EATS Themagneticlines fromevery tooth of the active cell flow into the two statorteeth nearby therefore one negative stiffness mechanicalunit consists of two different kinds of tooth pairs The gappartitions of the two different tooth pairs are shown inFigure 3
Figure 3(a) shows the situation that an active cell toothmoves close to a stator tooth in which the solid linerepresents the initial location of the active cell tooth and thetwo-dot chain line represents the location of the active celltooth with 119909 displacement
For the overlap section shown in Figure 4(a) the mag-netic circuit is straight and the corresponding magneticconductance Λ 119886 is
Λ 119886 = 21205830120587119903119909119892 (4)
where 119903 is the radius of active cell and 119892 is the width of air gapDifferent to that of the overlap section the magnetic
circuit of the edge section is elliptic The short radius ofelliptic circuit is 119897 and the long radius of elliptic circuit is119892 + 120581119897 where the elliptic circuit coefficient 120581 is given as
120581 = 119897119892 + 119897 (5)
The differential sectional area of the edge circuit is
119889119904 = 2120587119903119889119897 + 1205811198891198972 = 120587119903 (1 + 120581) 119889119897 (6)
and the corresponding average length is given by
119897119898 = 119892 + 1205872 119897 (7)
NI
Λ 1
Λ 2
Λ 3
Λ 4
Figure 2 Equivalent magnetic circuit of EATS
Combining (5)sim(7) and considering the symmetry ofmagnetic circuit can give the magnetic conductance of theedge partition as
Λ 119887 = Λ 119888 = int 1205830119897119898 119889119904 = int119908minus1199090
1205830119892 + 1205871198972120587119903 (1 + 120581) 119889119897= 21205830119903120587 minus 2 [120587 ln
119892 + 119908 minus 119909119892 + (120587 minus 4) ln 2119892 + 120587119908 minus 1205871199092119892 ](8)
Thus the overall magnetic conductance of the magneticcircuit shown as Figure 4(a) is
Λ 1198901 = Λ 119886 + Λ 119887 + Λ 119888 = 21205830120587119903119909119892+ 41205830119903120587 minus 2 [120587 ln
119892 + 119908 minus 119909119892+ (120587 minus 4) ln 2119892 + 120587119908 minus 1205871199092119892 ]
(9)
Substituting (9) into (2) obtains the electromagnetic force11986511989011198651198901 = minus(119873119868)28 120597Λ 1198901120597119909 = 1205871205830119903 (119873119868)24 [minus 1119892
+ 2120587 minus 2 ( 1119892 + 119908 minus 119909 minus 4 minus 1205872119892 + 120587119908 minus 120587119909)](10)
Figure 3(b) shows the situation that an active cell toothmoves away from a stator tooth in which the solid linerepresents the initial location of the active cell tooth andthe two-dot chain line represents the location of the activecell tooth with 119909 displacement Only elliptic circuits exist inthis situation and the corresponding magnetic conductanceis given by
Λ 119886 = Λ 119887 = int119908+119909119909
1205830119892 + (1205872) 119897120587119903119892 + 2119897119892 + 119897 119889119897
4 Shock and Vibration
(a) (b)
Stator
Active cell
x
l dl
w
w
g
kdl
kl
Λc
Λa
Λb
x w
w
Λa
Λb
Figure 3 Air gap partition of a mechanical unit with negative stiffness
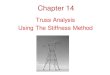
(a) 0mm (b) 05mm (c) 35mm
Figure 4 Magnetic fields of EATS for different active cell positions for 119868 = 06A
= 21205830119903120587 minus 2 [120587 ln(1 + 119908119892 + 119909)+ (120587 minus 4) ln(1 + 1205871199082119892 + 120587119909)]
(11)
Therefore the overall magnetic conductance of the magneticcircuit shown in Figure 3(b) is
Λ 1198902 = Λ 119886 + Λ 119887 = 41205830119903120587 minus 2 [120587 ln(1 + 119908119892 + 119909)+ (120587 minus 4) ln(1 + 1205871199082119892 + 120587119909)]
(12)
and the electromagnetic force 1198651198902 is1198651198902 = minus(119873119868)28 120597Λ 1198902120597119909
= 1205871199081205830119903 (119873119868)22 (120587 minus 2) [ 1(119908 + 119892 + 119909) (119892 + 119909)minus 120587 (4 minus 120587)(120587119908 + 2119892 + 120587119909) (2119892 + 120587119909)]
(13)
Combining (3) (10) and (13) the overall electromagneticforce of the EATS is obtained by
119865 = sgn (119909) 1205871205830119903 (119873119868)2 [minus 1119892
Shock and Vibration 5
Table 1 Simulation parameters
Parameter ValueTooth width 4mmTooth space 4mmWidth of gap 03mmCoil current 06 ACoil turns 190Permeability material DT4-C
+ 2120587 minus 2 ( 1119892 + 119908 minus |119909| minus 4 minus 1205872119892 + 120587119908 minus 120587 |119909|)]+ 21205871199081205830119903 (119873119868)2120587 minus 2 [ 1(119908 + 119892 + |119909|) (119892 + |119909|)minus 120587 (4 minus 120587)(120587119908 + 2119892 + 120587 |119909|) (2119892 + 120587 |119909|)]
(14)
where sgn(∙) is the sign function
23 Simulation of the EATS In order to validate the negativestiffness of the EATS and demonstrate the correctness ofthe analytical electromagnetic force a series of simulationsof the EATS are conducted Figure 4 shows the simplifiedsimulation model and the distribution of the magnetic fluxfor different active cell positions for a current of 06 A Table 1depicts the parameters used in simulations by using finiteelement software
When the active cell rightly stays at the equilibrium posi-tion the magnetic field of the EATS is shown in Figure 4(a)The magnetic fluxes from every tooth of the active cell flowinto two teeth of the stator therefore there are two forceswhich exist between one active cell tooth and two statorteeth The overall electromagnetic force of the EATS is zeroand the system is quasi-stable When the active cell movesupwards 05mm shown in Figure 4(b) the distribution ofthe magnetic flux from one active cell tooth to two statorteeth is changed The magnetic flux of the upper close statortooth becomes larger and that of the lower close stator toothis contrary thus the direction of the overall electromagneticforce is also upward same as the moving direction of theactive cell and the system is unstable When the active cellmoves upwards 35mm above the equilibrium position it isinteresting that the magnetic field of the EATS is similar tothat of the traditional tooth structure with positive stiffnesscharacteristic and detailed analysis can be found in [22]
Table 2 shows the parameters used in analytical calcula-tion of the electromagnetic force Substituting the parametersshown in Table 2 to (14) leads to the analytical electromag-netic force and the results are shown in Figure 5 Besidesthe simulation results for various current are also plotted inFigure 5 to compare with the analytical solutions
It can be seen from Figure 5 that the analytical solutionscalculated by (14) match well with the simulation resultsFurthermore it is demonstrated that the EATS can provide
Table 2 Parameters of analytical electromagnetic force
Parameter Value1205830
4120587 times 10minus7119903 395mm119873 190119868 05 A06 A07 A119892 03mm119908 4mm
8
6
4
2
0
minus2
minus4
minus6
minus8
Fe(
)
Simulationresults
Analyticalsolutions
times10minus3
43210minus1minus2minus3minus4
05A06A07A
05A06A07A
x (m)
Figure 5 Electromagnetic force of the EATS for various current
an electromagnetic force with negative stiffness near theequilibrium position and the magnitude of the force can bechanged by adjusting the coil current Another importantphenomenon which should be noted is that the electromag-netic force provided by the EATS has piecewise characteristicand the stiffness will become positive if the active cell has alarge displacement
3 Application of the EATS
In an effort to capture the negative stiffness characteristicof the EATS in the following experimental tests the EATSis applied to vibration isolation and an electromagneticvibration isolator (EVI) is proposed in this section
31 Basic Configuration of the EVI The schematic struc-ture and 3D configuration of the designed electromagneticvibration isolator is depicted in Figure 6 Figure 7 showsthe photograph of the components of the EVI The isolatormainly includes two components mechanical coil springsused to provide positive stiffness and electromagnetic asym-metric tooth structure used to provide negative stiffness Themechanical springs consist of three types of coil springssymbolized by 11989611 11989612 and 11989613 separately One mechanicalspring denoted by 11989612 and four mechanical springs alldenoted by 11989613 are employed to maintain the active cell at
6 Shock and Vibration
MASS
Stator
Coil
ActiveCell
k11
k12
k13
(a)
Plate
Coils
Active cell
StatorAxis
Mechanical springs
Shaft
Linear bearing
Top cap
Base
(b)
Figure 6 Scheme and 3D configuration of EVI (a) schematic diagram and (b) 3D configuration
Plate
Shaft
Active cell
Stator Axis
Coils
SpringsTop cap Base
Figure 7 Photograph of the components of the EVI
the desired position when no electric power is applied andno additional isolated mass is added The mechanical coilsprings symbolized by 11989611 placed between the plate and thecylinder body are only used to balance the additional massand provide positive vertical stiffness in future applicationA linear bearing is placed between the active cell and theaxis for the purpose of maintaining the concentricity of theactive cell and the stator It should be noted that the staticstiffness depends only on the mechanical coil springs whilethe dynamic stiffness comes from the combined effect of themechanical springs and the electromagnetic tooth structure
It can be known from [23] that a mistuningmass will leadto a much more complex dynamic response of the systemThus a regulating mechanism of the active cell positionshown in Figure 8 is designed to solve this problem
The regulating mechanism can adjust the position ofthe active cell by changing the precompression of theintermediate spring When the position of the active cellneeds to be adjusted an adjusting knob is inserted into thescrew thread mechanism and can be rotated clockwise oranticlockwise to adjust the upper end of the mechanical
spring It should be noted that the adjusting knob should bedesigned horizontally in future practical application for thereason that the isolated mass will be mounted on the plate
32 Stiffness Characteristics of the EVI Figure 9 depictsthe force and displacement curves of the EATS for vari-ous current meanwhile the force characteristic curve ofmechanical springs is also plotted for comparison In the neararea of the equilibrium position the electromagnetic forceprovided by the EATS has a negative stiffness characteristicand the overall stiffness of the mechanical springs is reducedThe electromagnetic force becomes larger when the currentincreasesTheoverall forcewill be zero if the current increasesto 11 A because the electromagnetic force is equal to themechanical spring force When the current exceeds 11 A theoverall force will have a negative stiffness characteristic nearthe equilibriumposition and the active cell cannot be broughtback to the equilibrium position by the mechanical springswhich is quite unfavorable in practical application
However there are still some imperfect aspects of thedesign that should be noted For example the range of thenegative stiffness is limited to (minus2mm 2mm) which is quitesmall compared with that of [18] Moreover the negativestiffness provided by the EATS has a very obvious nonlinearcharacteristic thus the dynamic behaviors of the isolatormay be more complex than that of the equivalent linearone In what follows a series of experiments are conductedto measure the negative stiffness and explore the dynamicresponses of the designed electromagnetic vibration isolator
4 Experimental Studies
This section describes a series of experimental tests that wereconducted to validate the negative stiffness characteristic ofthe EATS and investigate the isolation performance of theEVI with or without excitation current Two experimentaltests weremainly performed (i) frequency sweeps in the base
Shock and Vibration 7
Adjusting knob
Plate
Top cap
Mechanical spring
Screw thread Mechanism
(a) (b)
Figure 8 Regulating mechanism of active cell position
Overall force for
Electromagnetic
times10minus3
minus30
minus20
minus10
0
10
20
30
Fe
(N)
0 05x (m)
15minus15 minus05 1 2minus1minus2
kl = 435G
I = 06 11 15
15 11 06
force for I =
Figure 9 Force and displacement curves of the EATS for variouscurrent
excitation frequency while holding base harmonic excitationvelocity constant and (ii) isolation performances of the EVIsystem under single frequency harmonic excitation
In this section a numerical simulation corresponding tothe experimental test is also carried out for two reasons (i)supporting the experimental results and (ii) quantifying theinfluence of the current on the damping ratio due to theimperfect fabrication
A simple analysis is conducted here to show how thenumerical results are obtained Assuming the vertical baseexcitation is 119909119890 = 119883119890 cos (120596119890119905) dynamic equation of theisolation system can be written as
119898119905 + 119888 (119905 minus 119890) + 119896119897 (119909119905 minus 119909119890) + 119865 = 0 (15)
where 119909119905 is the displacement response of the isolated mass119888 is the damping and 119865 is the electromagnetic force whichcan be obtained from (14) We introduce the nondimensionalparameters
119910 = (119909119905 minus 119909119890)(119883119890120596) 120577 = 1198882119898Ω
120596 = 120596119890Ω 120591 = Ω119905
Ω2 = 119896119897119898(16)
Equation (15) can be rewritten in nondimensional formas
11991010158401015840 + 21205771199101015840 + 119910 + 119865119883119890120596119896119897 = 120596 cos (120596120591) (17)
where 119865 is the nondimensional form of (14) In the numericalanalysis only the primary resonance case is considered thusthe solution of (17) can be assumed as 119884 cos (120596120591 + 120579) Thetransmissibility of the isolation system corresponding to (17)can be derived as
119879 = radic1 + 12059621198842 + 2120596119884 cos 120579 (18)
Based on the above analysis the numerical transmissibil-ity results can be obtained by the fourth-order Runge-Kuttamethod and the fast Fourier transform
Figure 10 shows the experimental setup and schematicdiagram used in experimental testsThe isolator was poweredby a DC power source and harmonically excited by an ES-10-240 shaker produced by Dongling Vibration Test InstrumentCo Ltd China The accelerations of the base excitationand the isolated mass were measured by two CA-YD-127acceleration transducers produced by Sinocera PiezotronicsInc China A PC connected with a 3053-B data acquisitionproduced by Bruel amp Kjaeligr was used to collect and processacceleration response signals In addition there are severalimportant points needed to be addressed First of all theactive cell of the isolator was made by electrical pure ironand can be regarded as the isolated mass thus no additionalisolatedmass wasmounted on the isolator and nomechanicalspring denoted by 11989611 was placed between the plate andthe top cap Furthermore when the DC power source wasturned off there was no electromagnetic stiffness and only
8 Shock and Vibration
Acceleration Sensor
DC Power SourceVibrator
PULSE
Isolator
PC
(a)
Acceleration Sensor
Vibrator
Isolator
(b)
Power Source
Isolator Acceleration Sensor
Vibrator
PULSE
Power Amplifier
(c)
Figure 10 Experimental setup used in experimental tests (a) primary equipment (b) test rig and (c) schematic diagram
the mechanical springs worked At last compared with thedisplacement the amplitude of the velocity was much easierto hold Therefore the amplitude of velocity was holdingconstant during the upward frequency sweep experimentsThe frequency of the base excitation linearly varied from 5Hzto 60Hz in 10 seconds
In Section 2 the analytical electromagnetic force is shownas (14) In order to calculate the negative stiffness near theequilibrium position a third-order polynomial is applied tofit the theoretical results and the linear term of the fittingpolynomial is the negative stiffnessTherefore the theoreticalresonance frequency of the isolation system can be calculatedby
119891119905 = 12120587radic119896119897 + 119896119899119898 (19)
where119898 is the isolated mass and 119896119899 means the linear term ofthe negative stiffness In the experiment the isolated mass is204 kg which consists of four parts the active cell the shaft
the plate and the acceleration transducerTheoverall stiffnessof the mechanical springs 119896119897 is 435Nmm
Experimental acceleration and transmissibility curvesfrom frequency sweeps are depicted in Figure 11 in which119868 is the magnitude of the current applied into the isolatorThe velocity is 32 times 10minus3ms which can be calculated bydividing the acceleration by the circular frequency Besidesthe numerical transmissibility results for various magnitudesof the current are also plotted in Figure 11(b) in which theasterisks represent the numerical results for damping ratio120577 = 004 and the circles refer to the numerical results whosedamping ratio is almost the same as that of the experimentalresults It should be pointed out that the damping ratioof 004 is not obtained by experimental measurements butrather by numerical calculations When the DC power isturned off the electromagnetic asymmetric tooth structuredoes not work and the system can be regarded as a linearsystem If the damping ratio is 004 the numerical resultsof the linear system compare well with that measured byexperimental tests for no current Thus the damping ratioin experimental tests can be regarded as 004 to a certain
Shock and Vibration 9
No current
Base excitation90
100
110
120
130
140Ac
celeration
(dB)
15 20 25 30 35 4010Frequency (Hz)
I = 06AI = 08A I = 03A
(a)
No current
0
5
10
15
Tran
smissibility
15 20 25 30 35 4010Frequency (Hz)
I = 06A
I = 08A I = 03A
(b)
Figure 11 Experimental acceleration and transmissibility curves from frequency sweeps (a) acceleration response and (b) transmissibility
Table 3 Comparison of the theoretical resonance frequency and the experimental resonance frequency for various current
Current (A) Theoretical resonance frequency (Hz) Experimental resonance frequency (Hz) Error ratio ()0 2324 2325 00403 2251 2250 00404 2193 2200 03205 2116 2125 04206 2017 2025 04007 1894 1925 16108 1741 1700 241
degree It can be seen that the experimental results comparewell with the numerical results when the magnitude of theapplied current is 03 A However when the magnitude ofthe current increases to 06 A the peak transmissibility ofthe experimental results is a little lower than that of thenumerical results this is because that a radial electromagneticforce exists between the active cell and the stator due tothe imperfect concentricity and it increases the dampingforce between the top cap and the shaft The green circlesrepresent the numerical results for 120577 = 0045 In thiscase the peak transmissibility of the numerical simulation isalmost the same as that of the experimental measurementSimilar but more obvious phenomenon can also be foundin the case of 119868 = 08A In this case the red circles referto the numerical results for 120577 = 009 It should also benoted that the comparison of the numerical results and theexperimental results is not very good at some frequenciesIt is probably because that some other kinds of dampingforces exist in the isolation system such as the dampingforce inside the linear bearing when the current is beingapplied
It can be known from Figure 11 that the experimentalresonance frequency of the linear case is 2324Hz whichis identical with the theoretical result corresponding to(19) After applying a current of 03 A to the system theEATS works and there is a negative stiffness to weaken themechanical stiffness Therefore the experimental resonancefrequency is reduced to 2250Hz which is consistent withthe theoretical result 2251Hz It can also been known fromFigure 11 that the resonance frequency becomes smalleras the current increases This is because a higher currentleads to a larger negative stiffness and a smaller overallstiffness
Table 3 gives the detailed comparison of the theoreticalresonance frequency and the experimental resonance fre-quency for various current The error ratio is defined as
119890 = 1003816100381610038161003816119891119905 minus 1198911198981003816100381610038161003816119891119898 times 100 (20)
where 119891119898 is the experimental resonance frequency FromTable 3 it can be known that the theoretical frequencies forvarious current compare well with the measured results
The analysis in Table 3 has confirmed that the derivedanalytical electromagnetic force is accurate enough and theproposed EATS is able to provide a variable negative stiffnessnear the equilibrium position Another phenomenon whichshould be noted is that the isolation performance of theisolator with current is better than that of the isolator withoutcurrent in low frequency range In order to show this phe-nomenon better the isolation response of the isolator withand without the current under single frequency harmonicexcitation was measured Considering the response curvesshown in Figure 11 23Hz and 34Hz were taken as the testfrequency separately
When the excitation frequency of the system is 23Hz themeasured acceleration results of the isolator are shown in Fig-ure 12 For better comparison of the isolation performancebase excitation curve is also plotted When the DC power isturned off the amplitude of the acceleration of the isolator ismuch larger than that of the base excitation This is becausethe excitation frequency of 23Hz is close to the resonancefrequency of 2325Hz After turning on the DC power itis interesting to find out that the acceleration amplitudeof the isolator at this frequency reduces from 30341ms2to 3495ms2 Thus the maximum displacement reduces
10 Shock and Vibration
Base excitationNo current
minus60minus40minus20
0204060
Acceleration
(ms
2)
02 04 06 080 1Time (s)
I = 06A(a)
05
101520253035
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
1648ms23495ms2
30341ms2
Base excitationNo currentI = 06A
(b)
Figure 12 Isolation performance of the isolator for a base excitation frequency of 23Hz (a) time domain and (b) frequency domain
minus6minus4minus2
0246
Acceleration
(ms
2)
01 02 03 04 05 060Time (s)
Base excitationNo currentI = 06A
(a)
0
1
2
3
4
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
2935ms2 3263ms2
1403ms2
Base excitationNo currentI = 06A
(b)
Figure 13 Isolation performance of the isolator for a base excitation frequency of 34Hz (a) time domain and (b) frequency domain
from 145mm to 017mm and the isolation performancebecomes much better than that of the former case Similarphenomenon can be observed in the experimental tests at thefrequency of 34Hz shown in Figure 13 At this frequencythe acceleration magnitude of the isolator without currentapplied is almost equal to that of the base excitation and theisolator has no vibration isolation effect However when acurrent of 06 A is applied to the isolator there is an accel-eration magnitude reduction of 1860ms2 at this frequencyThis is because the negative stiffness provided by the EATSweakens the overall mechanical stiffness therefore boththe resonance frequency and the initial isolation frequencybecome lower
The above investigation has confirmed the variable neg-ative stiffness provided by the EATS however there are stillsome unfavorable phenomenona which can be observed dur-ing the experimental tests The first one is that the dampingratio becomes larger with the increase of the current Aswe all know a larger damping ratio is beneficial for thevibration isolation in low level frequency range however it isunfavorable for the vibration isolation in high level frequencyrange The reason for this is that there is a contact frictionbetween the top cap and the shaft This is also why no staticforce measurements and sweep frequency experiments forlarge current are conducted in this paper Another one is thatthere are some fluctuations in the measured results shownin Figure 11 This is because the base excitation provided by
the shaker more or less has some small fluctuations in theinitial sweep frequency range and the isolator amplifies suchfluctuations in the low level frequency range
5 Conclusions
This paper mainly describes a new approach to achievevariable negative stiffnessThe negative stiffness is realized byan electromagnetic asymmetricmagnetic tooth structure andcan be changed by adjusting themagnitude of the input directcurrent Analytical electromagnetic force model of the EATSis built and then validated by comparing with the simulationresults An electromagnetic vibration isolator is designedusing the EATS and tested by a series of dynamical experi-ments During the experiments the negative stiffness of theEATS can be changed by adjusting the current which leads tothe variation of the resonance frequency The results confirmthe negative stiffness provided by the EATS and demonstratethat the theoretical resonance frequencies calculated by thederived electromagnetic force equation compare very wellwith the experimental resonance frequencies For the currentof 06 A the resonance frequency of the isolator reducesfrom 2325Hz to 2025Hz and the acceleration amplitudeof the isolator reduces from 30341ms2 to 3495ms2 at thefrequency of 23Hz It indicates that the negative stiffnessprovided by the EATS is beneficial for vibration isola-tion
Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

2 Shock and Vibration
variable negative stiffness are rarely reported Only two wayshave been found so far to realize variable negative stiffnessutilization of electromagnets [18ndash20] and application ofactuator [21] Zhou and Liu [18] and Francisco Ledezma-Ramirez et al [19 20] have presented a series of papersin which the negative stiffness is obtained by using twoelectromagnets and one (or two) permanent magnet Itworks like the mechanism proposed by [13] but the negativestiffness can be changed by adjusting the input currentHowever the characteristic of the magnet is very sensitive tothe temperature and the demagnetization phenomenon willoccur at high temperature Thus the isolator with magnetsis not suitable for vibration isolation at high temperatureUnlike the way of using the electromagnets Xu and Sun[21] proposed a theoretical model with adjustable negativestiffness by applying actuators to the traditional negativestiffness mechanism shown in [5 6] to change the prestressedlength of oblique springs However this regulating mode ofthe negative stiffnessmay be not very suitable for the practicalapplication due to the empty trip phenomenon
Although twoways have been proposed to realize variablenegative stiffness it is still too few for future application ofvariable negative stiffness and some new approaches shouldbe studied In this paper a new approach is developed toachieve variable negative stiffness and applied in vibrationisolation The variable negative stiffness is created by anelectromagnetic asymmetric tooth structure (EATS) and canbe changed by adjusting the magnitude of the direct currentNo magnet is used in the design so that the influence of thetemperature on the effectiveness of the negative stiffness isvery smallThemagnitude of the negative stiffness is adjustedby the current thus no auxiliary regulating mechanism isneeded It is not the intention here to address the advantageof the designed isolator compared with those impressingisolators proposed by [18ndash21] or how low frequency thedesigned isolator can work in Rather the intention is to showa new way to achieve variable negative stiffness and validateit by simulation calculations and experimental tests
The paper is organized as follows Firstly an electro-magnetic vibration isolator is designed in Section 2 Theelectromagnetic force with negative stiffness is modeled the-oretically and validated by finite element software Secondlyin Section 3 the EATS is applied to vibration isolation andan electromagnetic vibration isolator is proposed Thirdlythe experimental rig is built and the dynamic responses ofthe isolator in sweep and single frequencies are measured inSection 4 Finally the conclusion is given in Section 5
2 Configuration Model andSimulation of the EATS
21 Basic Configuration of the EATS The idea of electro-magnetic asymmetric tooth structure comes from the designof the traditional electromagnetic tooth structure (TETS)also called electromagnetic spring which has been usedin vibration absorption [22] The axisymmetric schematicdiagramof theTETS is shown in Figure 1(a) inwhich the bluearrows denote the magnetic lines The stator and the active
(b)(a)
Coil
Active cell
Stator
Figure 1 Axisymmetric schemes of (a) the traditional toothstructure and (b) the asymmetric tooth structure
cell are made by electrical iron that has high permeabilityThe number of the active cell teeth is equal to that of thestator and all the teeth are arranged symmetricallyThere willbe a closed magnetic circuit existing in the tooth structureand all the magnetic lines from one active cell tooth flowinto the opposite stator tooth when a constant direct currentpasses through the coil If the active cell moves away fromthe stator in vertical direction an electromagnetic force willbe generated between tooth pairs to prevent this movementThus the system behaves like a mechanical spring and has apositive stiffness near the equilibrium position
Figure 1(b) shows the axisymmetric schematic diagram ofthe EATS Different to the TETS the number of the statorsis two larger than that of the active cell and every activecell tooth is arranged between two stator teeth Thus themagnetic lines from one active cell tooth flow into two statorteeth and one active cell is applied by two electromagneticforces in opposite directions When the active cell stays atthe equilibrium position the overall electromagnetic forceis zero and the system is quasi-stable However if the activecell moves away from the equilibrium position there willbe an electromagnetic force generated between the activecell and the stator to strengthen this movement and thesystem becomes unstable Thus the system behaves like anelectromagnetic spring with negative stiffness
22 Analytical Model of the Electromagnetic Force of the EAST
221 Equivalent Magnetic Circuit Model It can be seen fromFigure 1 that the EAST consists of four active cell teeth andsix stator teeth which means that eight tooth pairs shouldbe considered in magnetic circuit modeling In general themagnetic resistance of the air gap is much larger than thatof the magnetizer which is made by electrical iron thus themagnetic resistance of the active cell and stator is neglected intheoretical modeling Figure 2 shows the equivalentmagneticcircuit of EATS where Λ is the magnetic conductance of theair gap andΦ is the corresponding magnetic flux
Shock and Vibration 3
For one of the air gaps which is numbered 1 themagneticcoenergy is
1198821 = 12 1198731198682 Φ1 = (119873119868)2 Λ 18 (1)
where119873 is the turns of the coil and 119868 is the magnitude of thecoil current
The electromagnetic force can be derived by using virtualwork principle
1198651 = minus1205971198821120597119909 = minus(119873119868)28 120597Λ 1120597119909 (2)
where 119909 is the relative displacement between the active celland the stator
Therefore the overall electromagnetic magnetic force is
119865 = minus2(1205971198821120597119909 minus 1205971198822120597119909 + 1205971198823120597119909 minus 1205971198824120597119909 )= minus(119873119868)24 (120597Λ 1120597119909 minus 120597Λ 2120597119909 + 120597Λ 3120597119909 minus 120597Λ 4120597119909 )
(3)
222 Axial Electromagnetic Force of the EATS Themagneticlines fromevery tooth of the active cell flow into the two statorteeth nearby therefore one negative stiffness mechanicalunit consists of two different kinds of tooth pairs The gappartitions of the two different tooth pairs are shown inFigure 3
Figure 3(a) shows the situation that an active cell toothmoves close to a stator tooth in which the solid linerepresents the initial location of the active cell tooth and thetwo-dot chain line represents the location of the active celltooth with 119909 displacement
For the overlap section shown in Figure 4(a) the mag-netic circuit is straight and the corresponding magneticconductance Λ 119886 is
Λ 119886 = 21205830120587119903119909119892 (4)
where 119903 is the radius of active cell and 119892 is the width of air gapDifferent to that of the overlap section the magnetic
circuit of the edge section is elliptic The short radius ofelliptic circuit is 119897 and the long radius of elliptic circuit is119892 + 120581119897 where the elliptic circuit coefficient 120581 is given as
120581 = 119897119892 + 119897 (5)
The differential sectional area of the edge circuit is
119889119904 = 2120587119903119889119897 + 1205811198891198972 = 120587119903 (1 + 120581) 119889119897 (6)
and the corresponding average length is given by
119897119898 = 119892 + 1205872 119897 (7)
NI
Λ 1
Λ 2
Λ 3
Λ 4
Figure 2 Equivalent magnetic circuit of EATS
Combining (5)sim(7) and considering the symmetry ofmagnetic circuit can give the magnetic conductance of theedge partition as
Λ 119887 = Λ 119888 = int 1205830119897119898 119889119904 = int119908minus1199090
1205830119892 + 1205871198972120587119903 (1 + 120581) 119889119897= 21205830119903120587 minus 2 [120587 ln
119892 + 119908 minus 119909119892 + (120587 minus 4) ln 2119892 + 120587119908 minus 1205871199092119892 ](8)
Thus the overall magnetic conductance of the magneticcircuit shown as Figure 4(a) is
Λ 1198901 = Λ 119886 + Λ 119887 + Λ 119888 = 21205830120587119903119909119892+ 41205830119903120587 minus 2 [120587 ln
119892 + 119908 minus 119909119892+ (120587 minus 4) ln 2119892 + 120587119908 minus 1205871199092119892 ]
(9)
Substituting (9) into (2) obtains the electromagnetic force11986511989011198651198901 = minus(119873119868)28 120597Λ 1198901120597119909 = 1205871205830119903 (119873119868)24 [minus 1119892
+ 2120587 minus 2 ( 1119892 + 119908 minus 119909 minus 4 minus 1205872119892 + 120587119908 minus 120587119909)](10)
Figure 3(b) shows the situation that an active cell toothmoves away from a stator tooth in which the solid linerepresents the initial location of the active cell tooth andthe two-dot chain line represents the location of the activecell tooth with 119909 displacement Only elliptic circuits exist inthis situation and the corresponding magnetic conductanceis given by
Λ 119886 = Λ 119887 = int119908+119909119909
1205830119892 + (1205872) 119897120587119903119892 + 2119897119892 + 119897 119889119897
4 Shock and Vibration
(a) (b)
Stator
Active cell
x
l dl
w
w
g
kdl
kl
Λc
Λa
Λb
x w
w
Λa
Λb
Figure 3 Air gap partition of a mechanical unit with negative stiffness
(a) 0mm (b) 05mm (c) 35mm
Figure 4 Magnetic fields of EATS for different active cell positions for 119868 = 06A
= 21205830119903120587 minus 2 [120587 ln(1 + 119908119892 + 119909)+ (120587 minus 4) ln(1 + 1205871199082119892 + 120587119909)]
(11)
Therefore the overall magnetic conductance of the magneticcircuit shown in Figure 3(b) is
Λ 1198902 = Λ 119886 + Λ 119887 = 41205830119903120587 minus 2 [120587 ln(1 + 119908119892 + 119909)+ (120587 minus 4) ln(1 + 1205871199082119892 + 120587119909)]
(12)
and the electromagnetic force 1198651198902 is1198651198902 = minus(119873119868)28 120597Λ 1198902120597119909
= 1205871199081205830119903 (119873119868)22 (120587 minus 2) [ 1(119908 + 119892 + 119909) (119892 + 119909)minus 120587 (4 minus 120587)(120587119908 + 2119892 + 120587119909) (2119892 + 120587119909)]
(13)
Combining (3) (10) and (13) the overall electromagneticforce of the EATS is obtained by
119865 = sgn (119909) 1205871205830119903 (119873119868)2 [minus 1119892
Shock and Vibration 5
Table 1 Simulation parameters
Parameter ValueTooth width 4mmTooth space 4mmWidth of gap 03mmCoil current 06 ACoil turns 190Permeability material DT4-C
+ 2120587 minus 2 ( 1119892 + 119908 minus |119909| minus 4 minus 1205872119892 + 120587119908 minus 120587 |119909|)]+ 21205871199081205830119903 (119873119868)2120587 minus 2 [ 1(119908 + 119892 + |119909|) (119892 + |119909|)minus 120587 (4 minus 120587)(120587119908 + 2119892 + 120587 |119909|) (2119892 + 120587 |119909|)]
(14)
where sgn(∙) is the sign function
23 Simulation of the EATS In order to validate the negativestiffness of the EATS and demonstrate the correctness ofthe analytical electromagnetic force a series of simulationsof the EATS are conducted Figure 4 shows the simplifiedsimulation model and the distribution of the magnetic fluxfor different active cell positions for a current of 06 A Table 1depicts the parameters used in simulations by using finiteelement software
When the active cell rightly stays at the equilibrium posi-tion the magnetic field of the EATS is shown in Figure 4(a)The magnetic fluxes from every tooth of the active cell flowinto two teeth of the stator therefore there are two forceswhich exist between one active cell tooth and two statorteeth The overall electromagnetic force of the EATS is zeroand the system is quasi-stable When the active cell movesupwards 05mm shown in Figure 4(b) the distribution ofthe magnetic flux from one active cell tooth to two statorteeth is changed The magnetic flux of the upper close statortooth becomes larger and that of the lower close stator toothis contrary thus the direction of the overall electromagneticforce is also upward same as the moving direction of theactive cell and the system is unstable When the active cellmoves upwards 35mm above the equilibrium position it isinteresting that the magnetic field of the EATS is similar tothat of the traditional tooth structure with positive stiffnesscharacteristic and detailed analysis can be found in [22]
Table 2 shows the parameters used in analytical calcula-tion of the electromagnetic force Substituting the parametersshown in Table 2 to (14) leads to the analytical electromag-netic force and the results are shown in Figure 5 Besidesthe simulation results for various current are also plotted inFigure 5 to compare with the analytical solutions
It can be seen from Figure 5 that the analytical solutionscalculated by (14) match well with the simulation resultsFurthermore it is demonstrated that the EATS can provide
Table 2 Parameters of analytical electromagnetic force
Parameter Value1205830
4120587 times 10minus7119903 395mm119873 190119868 05 A06 A07 A119892 03mm119908 4mm
8
6
4
2
0
minus2
minus4
minus6
minus8
Fe(
)
Simulationresults
Analyticalsolutions
times10minus3
43210minus1minus2minus3minus4
05A06A07A
05A06A07A
x (m)
Figure 5 Electromagnetic force of the EATS for various current
an electromagnetic force with negative stiffness near theequilibrium position and the magnitude of the force can bechanged by adjusting the coil current Another importantphenomenon which should be noted is that the electromag-netic force provided by the EATS has piecewise characteristicand the stiffness will become positive if the active cell has alarge displacement
3 Application of the EATS
In an effort to capture the negative stiffness characteristicof the EATS in the following experimental tests the EATSis applied to vibration isolation and an electromagneticvibration isolator (EVI) is proposed in this section
31 Basic Configuration of the EVI The schematic struc-ture and 3D configuration of the designed electromagneticvibration isolator is depicted in Figure 6 Figure 7 showsthe photograph of the components of the EVI The isolatormainly includes two components mechanical coil springsused to provide positive stiffness and electromagnetic asym-metric tooth structure used to provide negative stiffness Themechanical springs consist of three types of coil springssymbolized by 11989611 11989612 and 11989613 separately One mechanicalspring denoted by 11989612 and four mechanical springs alldenoted by 11989613 are employed to maintain the active cell at
6 Shock and Vibration
MASS
Stator
Coil
ActiveCell
k11
k12
k13
(a)
Plate
Coils
Active cell
StatorAxis
Mechanical springs
Shaft
Linear bearing
Top cap
Base
(b)
Figure 6 Scheme and 3D configuration of EVI (a) schematic diagram and (b) 3D configuration
Plate
Shaft
Active cell
Stator Axis
Coils
SpringsTop cap Base
Figure 7 Photograph of the components of the EVI
the desired position when no electric power is applied andno additional isolated mass is added The mechanical coilsprings symbolized by 11989611 placed between the plate and thecylinder body are only used to balance the additional massand provide positive vertical stiffness in future applicationA linear bearing is placed between the active cell and theaxis for the purpose of maintaining the concentricity of theactive cell and the stator It should be noted that the staticstiffness depends only on the mechanical coil springs whilethe dynamic stiffness comes from the combined effect of themechanical springs and the electromagnetic tooth structure
It can be known from [23] that a mistuningmass will leadto a much more complex dynamic response of the systemThus a regulating mechanism of the active cell positionshown in Figure 8 is designed to solve this problem
The regulating mechanism can adjust the position ofthe active cell by changing the precompression of theintermediate spring When the position of the active cellneeds to be adjusted an adjusting knob is inserted into thescrew thread mechanism and can be rotated clockwise oranticlockwise to adjust the upper end of the mechanical
spring It should be noted that the adjusting knob should bedesigned horizontally in future practical application for thereason that the isolated mass will be mounted on the plate
32 Stiffness Characteristics of the EVI Figure 9 depictsthe force and displacement curves of the EATS for vari-ous current meanwhile the force characteristic curve ofmechanical springs is also plotted for comparison In the neararea of the equilibrium position the electromagnetic forceprovided by the EATS has a negative stiffness characteristicand the overall stiffness of the mechanical springs is reducedThe electromagnetic force becomes larger when the currentincreasesTheoverall forcewill be zero if the current increasesto 11 A because the electromagnetic force is equal to themechanical spring force When the current exceeds 11 A theoverall force will have a negative stiffness characteristic nearthe equilibriumposition and the active cell cannot be broughtback to the equilibrium position by the mechanical springswhich is quite unfavorable in practical application
However there are still some imperfect aspects of thedesign that should be noted For example the range of thenegative stiffness is limited to (minus2mm 2mm) which is quitesmall compared with that of [18] Moreover the negativestiffness provided by the EATS has a very obvious nonlinearcharacteristic thus the dynamic behaviors of the isolatormay be more complex than that of the equivalent linearone In what follows a series of experiments are conductedto measure the negative stiffness and explore the dynamicresponses of the designed electromagnetic vibration isolator
4 Experimental Studies
This section describes a series of experimental tests that wereconducted to validate the negative stiffness characteristic ofthe EATS and investigate the isolation performance of theEVI with or without excitation current Two experimentaltests weremainly performed (i) frequency sweeps in the base
Shock and Vibration 7
Adjusting knob
Plate
Top cap
Mechanical spring
Screw thread Mechanism
(a) (b)
Figure 8 Regulating mechanism of active cell position
Overall force for
Electromagnetic
times10minus3
minus30
minus20
minus10
0
10
20
30
Fe
(N)
0 05x (m)
15minus15 minus05 1 2minus1minus2
kl = 435G
I = 06 11 15
15 11 06
force for I =
Figure 9 Force and displacement curves of the EATS for variouscurrent
excitation frequency while holding base harmonic excitationvelocity constant and (ii) isolation performances of the EVIsystem under single frequency harmonic excitation
In this section a numerical simulation corresponding tothe experimental test is also carried out for two reasons (i)supporting the experimental results and (ii) quantifying theinfluence of the current on the damping ratio due to theimperfect fabrication
A simple analysis is conducted here to show how thenumerical results are obtained Assuming the vertical baseexcitation is 119909119890 = 119883119890 cos (120596119890119905) dynamic equation of theisolation system can be written as
119898119905 + 119888 (119905 minus 119890) + 119896119897 (119909119905 minus 119909119890) + 119865 = 0 (15)
where 119909119905 is the displacement response of the isolated mass119888 is the damping and 119865 is the electromagnetic force whichcan be obtained from (14) We introduce the nondimensionalparameters
119910 = (119909119905 minus 119909119890)(119883119890120596) 120577 = 1198882119898Ω
120596 = 120596119890Ω 120591 = Ω119905
Ω2 = 119896119897119898(16)
Equation (15) can be rewritten in nondimensional formas
11991010158401015840 + 21205771199101015840 + 119910 + 119865119883119890120596119896119897 = 120596 cos (120596120591) (17)
where 119865 is the nondimensional form of (14) In the numericalanalysis only the primary resonance case is considered thusthe solution of (17) can be assumed as 119884 cos (120596120591 + 120579) Thetransmissibility of the isolation system corresponding to (17)can be derived as
119879 = radic1 + 12059621198842 + 2120596119884 cos 120579 (18)
Based on the above analysis the numerical transmissibil-ity results can be obtained by the fourth-order Runge-Kuttamethod and the fast Fourier transform
Figure 10 shows the experimental setup and schematicdiagram used in experimental testsThe isolator was poweredby a DC power source and harmonically excited by an ES-10-240 shaker produced by Dongling Vibration Test InstrumentCo Ltd China The accelerations of the base excitationand the isolated mass were measured by two CA-YD-127acceleration transducers produced by Sinocera PiezotronicsInc China A PC connected with a 3053-B data acquisitionproduced by Bruel amp Kjaeligr was used to collect and processacceleration response signals In addition there are severalimportant points needed to be addressed First of all theactive cell of the isolator was made by electrical pure ironand can be regarded as the isolated mass thus no additionalisolatedmass wasmounted on the isolator and nomechanicalspring denoted by 11989611 was placed between the plate andthe top cap Furthermore when the DC power source wasturned off there was no electromagnetic stiffness and only
8 Shock and Vibration
Acceleration Sensor
DC Power SourceVibrator
PULSE
Isolator
PC
(a)
Acceleration Sensor
Vibrator
Isolator
(b)
Power Source
Isolator Acceleration Sensor
Vibrator
PULSE
Power Amplifier
(c)
Figure 10 Experimental setup used in experimental tests (a) primary equipment (b) test rig and (c) schematic diagram
the mechanical springs worked At last compared with thedisplacement the amplitude of the velocity was much easierto hold Therefore the amplitude of velocity was holdingconstant during the upward frequency sweep experimentsThe frequency of the base excitation linearly varied from 5Hzto 60Hz in 10 seconds
In Section 2 the analytical electromagnetic force is shownas (14) In order to calculate the negative stiffness near theequilibrium position a third-order polynomial is applied tofit the theoretical results and the linear term of the fittingpolynomial is the negative stiffnessTherefore the theoreticalresonance frequency of the isolation system can be calculatedby
119891119905 = 12120587radic119896119897 + 119896119899119898 (19)
where119898 is the isolated mass and 119896119899 means the linear term ofthe negative stiffness In the experiment the isolated mass is204 kg which consists of four parts the active cell the shaft
the plate and the acceleration transducerTheoverall stiffnessof the mechanical springs 119896119897 is 435Nmm
Experimental acceleration and transmissibility curvesfrom frequency sweeps are depicted in Figure 11 in which119868 is the magnitude of the current applied into the isolatorThe velocity is 32 times 10minus3ms which can be calculated bydividing the acceleration by the circular frequency Besidesthe numerical transmissibility results for various magnitudesof the current are also plotted in Figure 11(b) in which theasterisks represent the numerical results for damping ratio120577 = 004 and the circles refer to the numerical results whosedamping ratio is almost the same as that of the experimentalresults It should be pointed out that the damping ratioof 004 is not obtained by experimental measurements butrather by numerical calculations When the DC power isturned off the electromagnetic asymmetric tooth structuredoes not work and the system can be regarded as a linearsystem If the damping ratio is 004 the numerical resultsof the linear system compare well with that measured byexperimental tests for no current Thus the damping ratioin experimental tests can be regarded as 004 to a certain
Shock and Vibration 9
No current
Base excitation90
100
110
120
130
140Ac
celeration
(dB)
15 20 25 30 35 4010Frequency (Hz)
I = 06AI = 08A I = 03A
(a)
No current
0
5
10
15
Tran
smissibility
15 20 25 30 35 4010Frequency (Hz)
I = 06A
I = 08A I = 03A
(b)
Figure 11 Experimental acceleration and transmissibility curves from frequency sweeps (a) acceleration response and (b) transmissibility
Table 3 Comparison of the theoretical resonance frequency and the experimental resonance frequency for various current
Current (A) Theoretical resonance frequency (Hz) Experimental resonance frequency (Hz) Error ratio ()0 2324 2325 00403 2251 2250 00404 2193 2200 03205 2116 2125 04206 2017 2025 04007 1894 1925 16108 1741 1700 241
degree It can be seen that the experimental results comparewell with the numerical results when the magnitude of theapplied current is 03 A However when the magnitude ofthe current increases to 06 A the peak transmissibility ofthe experimental results is a little lower than that of thenumerical results this is because that a radial electromagneticforce exists between the active cell and the stator due tothe imperfect concentricity and it increases the dampingforce between the top cap and the shaft The green circlesrepresent the numerical results for 120577 = 0045 In thiscase the peak transmissibility of the numerical simulation isalmost the same as that of the experimental measurementSimilar but more obvious phenomenon can also be foundin the case of 119868 = 08A In this case the red circles referto the numerical results for 120577 = 009 It should also benoted that the comparison of the numerical results and theexperimental results is not very good at some frequenciesIt is probably because that some other kinds of dampingforces exist in the isolation system such as the dampingforce inside the linear bearing when the current is beingapplied
It can be known from Figure 11 that the experimentalresonance frequency of the linear case is 2324Hz whichis identical with the theoretical result corresponding to(19) After applying a current of 03 A to the system theEATS works and there is a negative stiffness to weaken themechanical stiffness Therefore the experimental resonancefrequency is reduced to 2250Hz which is consistent withthe theoretical result 2251Hz It can also been known fromFigure 11 that the resonance frequency becomes smalleras the current increases This is because a higher currentleads to a larger negative stiffness and a smaller overallstiffness
Table 3 gives the detailed comparison of the theoreticalresonance frequency and the experimental resonance fre-quency for various current The error ratio is defined as
119890 = 1003816100381610038161003816119891119905 minus 1198911198981003816100381610038161003816119891119898 times 100 (20)
where 119891119898 is the experimental resonance frequency FromTable 3 it can be known that the theoretical frequencies forvarious current compare well with the measured results
The analysis in Table 3 has confirmed that the derivedanalytical electromagnetic force is accurate enough and theproposed EATS is able to provide a variable negative stiffnessnear the equilibrium position Another phenomenon whichshould be noted is that the isolation performance of theisolator with current is better than that of the isolator withoutcurrent in low frequency range In order to show this phe-nomenon better the isolation response of the isolator withand without the current under single frequency harmonicexcitation was measured Considering the response curvesshown in Figure 11 23Hz and 34Hz were taken as the testfrequency separately
When the excitation frequency of the system is 23Hz themeasured acceleration results of the isolator are shown in Fig-ure 12 For better comparison of the isolation performancebase excitation curve is also plotted When the DC power isturned off the amplitude of the acceleration of the isolator ismuch larger than that of the base excitation This is becausethe excitation frequency of 23Hz is close to the resonancefrequency of 2325Hz After turning on the DC power itis interesting to find out that the acceleration amplitudeof the isolator at this frequency reduces from 30341ms2to 3495ms2 Thus the maximum displacement reduces
10 Shock and Vibration
Base excitationNo current
minus60minus40minus20
0204060
Acceleration
(ms
2)
02 04 06 080 1Time (s)
I = 06A(a)
05
101520253035
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
1648ms23495ms2
30341ms2
Base excitationNo currentI = 06A
(b)
Figure 12 Isolation performance of the isolator for a base excitation frequency of 23Hz (a) time domain and (b) frequency domain
minus6minus4minus2
0246
Acceleration
(ms
2)
01 02 03 04 05 060Time (s)
Base excitationNo currentI = 06A
(a)
0
1
2
3
4
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
2935ms2 3263ms2
1403ms2
Base excitationNo currentI = 06A
(b)
Figure 13 Isolation performance of the isolator for a base excitation frequency of 34Hz (a) time domain and (b) frequency domain
from 145mm to 017mm and the isolation performancebecomes much better than that of the former case Similarphenomenon can be observed in the experimental tests at thefrequency of 34Hz shown in Figure 13 At this frequencythe acceleration magnitude of the isolator without currentapplied is almost equal to that of the base excitation and theisolator has no vibration isolation effect However when acurrent of 06 A is applied to the isolator there is an accel-eration magnitude reduction of 1860ms2 at this frequencyThis is because the negative stiffness provided by the EATSweakens the overall mechanical stiffness therefore boththe resonance frequency and the initial isolation frequencybecome lower
The above investigation has confirmed the variable neg-ative stiffness provided by the EATS however there are stillsome unfavorable phenomenona which can be observed dur-ing the experimental tests The first one is that the dampingratio becomes larger with the increase of the current Aswe all know a larger damping ratio is beneficial for thevibration isolation in low level frequency range however it isunfavorable for the vibration isolation in high level frequencyrange The reason for this is that there is a contact frictionbetween the top cap and the shaft This is also why no staticforce measurements and sweep frequency experiments forlarge current are conducted in this paper Another one is thatthere are some fluctuations in the measured results shownin Figure 11 This is because the base excitation provided by
the shaker more or less has some small fluctuations in theinitial sweep frequency range and the isolator amplifies suchfluctuations in the low level frequency range
5 Conclusions
This paper mainly describes a new approach to achievevariable negative stiffnessThe negative stiffness is realized byan electromagnetic asymmetricmagnetic tooth structure andcan be changed by adjusting themagnitude of the input directcurrent Analytical electromagnetic force model of the EATSis built and then validated by comparing with the simulationresults An electromagnetic vibration isolator is designedusing the EATS and tested by a series of dynamical experi-ments During the experiments the negative stiffness of theEATS can be changed by adjusting the current which leads tothe variation of the resonance frequency The results confirmthe negative stiffness provided by the EATS and demonstratethat the theoretical resonance frequencies calculated by thederived electromagnetic force equation compare very wellwith the experimental resonance frequencies For the currentof 06 A the resonance frequency of the isolator reducesfrom 2325Hz to 2025Hz and the acceleration amplitudeof the isolator reduces from 30341ms2 to 3495ms2 at thefrequency of 23Hz It indicates that the negative stiffnessprovided by the EATS is beneficial for vibration isola-tion
Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Shock and Vibration 3
For one of the air gaps which is numbered 1 themagneticcoenergy is
1198821 = 12 1198731198682 Φ1 = (119873119868)2 Λ 18 (1)
where119873 is the turns of the coil and 119868 is the magnitude of thecoil current
The electromagnetic force can be derived by using virtualwork principle
1198651 = minus1205971198821120597119909 = minus(119873119868)28 120597Λ 1120597119909 (2)
where 119909 is the relative displacement between the active celland the stator
Therefore the overall electromagnetic magnetic force is
119865 = minus2(1205971198821120597119909 minus 1205971198822120597119909 + 1205971198823120597119909 minus 1205971198824120597119909 )= minus(119873119868)24 (120597Λ 1120597119909 minus 120597Λ 2120597119909 + 120597Λ 3120597119909 minus 120597Λ 4120597119909 )
(3)
222 Axial Electromagnetic Force of the EATS Themagneticlines fromevery tooth of the active cell flow into the two statorteeth nearby therefore one negative stiffness mechanicalunit consists of two different kinds of tooth pairs The gappartitions of the two different tooth pairs are shown inFigure 3
Figure 3(a) shows the situation that an active cell toothmoves close to a stator tooth in which the solid linerepresents the initial location of the active cell tooth and thetwo-dot chain line represents the location of the active celltooth with 119909 displacement
For the overlap section shown in Figure 4(a) the mag-netic circuit is straight and the corresponding magneticconductance Λ 119886 is
Λ 119886 = 21205830120587119903119909119892 (4)
where 119903 is the radius of active cell and 119892 is the width of air gapDifferent to that of the overlap section the magnetic
circuit of the edge section is elliptic The short radius ofelliptic circuit is 119897 and the long radius of elliptic circuit is119892 + 120581119897 where the elliptic circuit coefficient 120581 is given as
120581 = 119897119892 + 119897 (5)
The differential sectional area of the edge circuit is
119889119904 = 2120587119903119889119897 + 1205811198891198972 = 120587119903 (1 + 120581) 119889119897 (6)
and the corresponding average length is given by
119897119898 = 119892 + 1205872 119897 (7)
NI
Λ 1
Λ 2
Λ 3
Λ 4
Figure 2 Equivalent magnetic circuit of EATS
Combining (5)sim(7) and considering the symmetry ofmagnetic circuit can give the magnetic conductance of theedge partition as
Λ 119887 = Λ 119888 = int 1205830119897119898 119889119904 = int119908minus1199090
1205830119892 + 1205871198972120587119903 (1 + 120581) 119889119897= 21205830119903120587 minus 2 [120587 ln
119892 + 119908 minus 119909119892 + (120587 minus 4) ln 2119892 + 120587119908 minus 1205871199092119892 ](8)
Thus the overall magnetic conductance of the magneticcircuit shown as Figure 4(a) is
Λ 1198901 = Λ 119886 + Λ 119887 + Λ 119888 = 21205830120587119903119909119892+ 41205830119903120587 minus 2 [120587 ln
119892 + 119908 minus 119909119892+ (120587 minus 4) ln 2119892 + 120587119908 minus 1205871199092119892 ]
(9)
Substituting (9) into (2) obtains the electromagnetic force11986511989011198651198901 = minus(119873119868)28 120597Λ 1198901120597119909 = 1205871205830119903 (119873119868)24 [minus 1119892
+ 2120587 minus 2 ( 1119892 + 119908 minus 119909 minus 4 minus 1205872119892 + 120587119908 minus 120587119909)](10)
Figure 3(b) shows the situation that an active cell toothmoves away from a stator tooth in which the solid linerepresents the initial location of the active cell tooth andthe two-dot chain line represents the location of the activecell tooth with 119909 displacement Only elliptic circuits exist inthis situation and the corresponding magnetic conductanceis given by
Λ 119886 = Λ 119887 = int119908+119909119909
1205830119892 + (1205872) 119897120587119903119892 + 2119897119892 + 119897 119889119897
4 Shock and Vibration
(a) (b)
Stator
Active cell
x
l dl
w
w
g
kdl
kl
Λc
Λa
Λb
x w
w
Λa
Λb
Figure 3 Air gap partition of a mechanical unit with negative stiffness
(a) 0mm (b) 05mm (c) 35mm
Figure 4 Magnetic fields of EATS for different active cell positions for 119868 = 06A
= 21205830119903120587 minus 2 [120587 ln(1 + 119908119892 + 119909)+ (120587 minus 4) ln(1 + 1205871199082119892 + 120587119909)]
(11)
Therefore the overall magnetic conductance of the magneticcircuit shown in Figure 3(b) is
Λ 1198902 = Λ 119886 + Λ 119887 = 41205830119903120587 minus 2 [120587 ln(1 + 119908119892 + 119909)+ (120587 minus 4) ln(1 + 1205871199082119892 + 120587119909)]
(12)
and the electromagnetic force 1198651198902 is1198651198902 = minus(119873119868)28 120597Λ 1198902120597119909
= 1205871199081205830119903 (119873119868)22 (120587 minus 2) [ 1(119908 + 119892 + 119909) (119892 + 119909)minus 120587 (4 minus 120587)(120587119908 + 2119892 + 120587119909) (2119892 + 120587119909)]
(13)
Combining (3) (10) and (13) the overall electromagneticforce of the EATS is obtained by
119865 = sgn (119909) 1205871205830119903 (119873119868)2 [minus 1119892
Shock and Vibration 5
Table 1 Simulation parameters
Parameter ValueTooth width 4mmTooth space 4mmWidth of gap 03mmCoil current 06 ACoil turns 190Permeability material DT4-C
+ 2120587 minus 2 ( 1119892 + 119908 minus |119909| minus 4 minus 1205872119892 + 120587119908 minus 120587 |119909|)]+ 21205871199081205830119903 (119873119868)2120587 minus 2 [ 1(119908 + 119892 + |119909|) (119892 + |119909|)minus 120587 (4 minus 120587)(120587119908 + 2119892 + 120587 |119909|) (2119892 + 120587 |119909|)]
(14)
where sgn(∙) is the sign function
23 Simulation of the EATS In order to validate the negativestiffness of the EATS and demonstrate the correctness ofthe analytical electromagnetic force a series of simulationsof the EATS are conducted Figure 4 shows the simplifiedsimulation model and the distribution of the magnetic fluxfor different active cell positions for a current of 06 A Table 1depicts the parameters used in simulations by using finiteelement software
When the active cell rightly stays at the equilibrium posi-tion the magnetic field of the EATS is shown in Figure 4(a)The magnetic fluxes from every tooth of the active cell flowinto two teeth of the stator therefore there are two forceswhich exist between one active cell tooth and two statorteeth The overall electromagnetic force of the EATS is zeroand the system is quasi-stable When the active cell movesupwards 05mm shown in Figure 4(b) the distribution ofthe magnetic flux from one active cell tooth to two statorteeth is changed The magnetic flux of the upper close statortooth becomes larger and that of the lower close stator toothis contrary thus the direction of the overall electromagneticforce is also upward same as the moving direction of theactive cell and the system is unstable When the active cellmoves upwards 35mm above the equilibrium position it isinteresting that the magnetic field of the EATS is similar tothat of the traditional tooth structure with positive stiffnesscharacteristic and detailed analysis can be found in [22]
Table 2 shows the parameters used in analytical calcula-tion of the electromagnetic force Substituting the parametersshown in Table 2 to (14) leads to the analytical electromag-netic force and the results are shown in Figure 5 Besidesthe simulation results for various current are also plotted inFigure 5 to compare with the analytical solutions
It can be seen from Figure 5 that the analytical solutionscalculated by (14) match well with the simulation resultsFurthermore it is demonstrated that the EATS can provide
Table 2 Parameters of analytical electromagnetic force
Parameter Value1205830
4120587 times 10minus7119903 395mm119873 190119868 05 A06 A07 A119892 03mm119908 4mm
8
6
4
2
0
minus2
minus4
minus6
minus8
Fe(
)
Simulationresults
Analyticalsolutions
times10minus3
43210minus1minus2minus3minus4
05A06A07A
05A06A07A
x (m)
Figure 5 Electromagnetic force of the EATS for various current
an electromagnetic force with negative stiffness near theequilibrium position and the magnitude of the force can bechanged by adjusting the coil current Another importantphenomenon which should be noted is that the electromag-netic force provided by the EATS has piecewise characteristicand the stiffness will become positive if the active cell has alarge displacement
3 Application of the EATS
In an effort to capture the negative stiffness characteristicof the EATS in the following experimental tests the EATSis applied to vibration isolation and an electromagneticvibration isolator (EVI) is proposed in this section
31 Basic Configuration of the EVI The schematic struc-ture and 3D configuration of the designed electromagneticvibration isolator is depicted in Figure 6 Figure 7 showsthe photograph of the components of the EVI The isolatormainly includes two components mechanical coil springsused to provide positive stiffness and electromagnetic asym-metric tooth structure used to provide negative stiffness Themechanical springs consist of three types of coil springssymbolized by 11989611 11989612 and 11989613 separately One mechanicalspring denoted by 11989612 and four mechanical springs alldenoted by 11989613 are employed to maintain the active cell at
6 Shock and Vibration
MASS
Stator
Coil
ActiveCell
k11
k12
k13
(a)
Plate
Coils
Active cell
StatorAxis
Mechanical springs
Shaft
Linear bearing
Top cap
Base
(b)
Figure 6 Scheme and 3D configuration of EVI (a) schematic diagram and (b) 3D configuration
Plate
Shaft
Active cell
Stator Axis
Coils
SpringsTop cap Base
Figure 7 Photograph of the components of the EVI
the desired position when no electric power is applied andno additional isolated mass is added The mechanical coilsprings symbolized by 11989611 placed between the plate and thecylinder body are only used to balance the additional massand provide positive vertical stiffness in future applicationA linear bearing is placed between the active cell and theaxis for the purpose of maintaining the concentricity of theactive cell and the stator It should be noted that the staticstiffness depends only on the mechanical coil springs whilethe dynamic stiffness comes from the combined effect of themechanical springs and the electromagnetic tooth structure
It can be known from [23] that a mistuningmass will leadto a much more complex dynamic response of the systemThus a regulating mechanism of the active cell positionshown in Figure 8 is designed to solve this problem
The regulating mechanism can adjust the position ofthe active cell by changing the precompression of theintermediate spring When the position of the active cellneeds to be adjusted an adjusting knob is inserted into thescrew thread mechanism and can be rotated clockwise oranticlockwise to adjust the upper end of the mechanical
spring It should be noted that the adjusting knob should bedesigned horizontally in future practical application for thereason that the isolated mass will be mounted on the plate
32 Stiffness Characteristics of the EVI Figure 9 depictsthe force and displacement curves of the EATS for vari-ous current meanwhile the force characteristic curve ofmechanical springs is also plotted for comparison In the neararea of the equilibrium position the electromagnetic forceprovided by the EATS has a negative stiffness characteristicand the overall stiffness of the mechanical springs is reducedThe electromagnetic force becomes larger when the currentincreasesTheoverall forcewill be zero if the current increasesto 11 A because the electromagnetic force is equal to themechanical spring force When the current exceeds 11 A theoverall force will have a negative stiffness characteristic nearthe equilibriumposition and the active cell cannot be broughtback to the equilibrium position by the mechanical springswhich is quite unfavorable in practical application
However there are still some imperfect aspects of thedesign that should be noted For example the range of thenegative stiffness is limited to (minus2mm 2mm) which is quitesmall compared with that of [18] Moreover the negativestiffness provided by the EATS has a very obvious nonlinearcharacteristic thus the dynamic behaviors of the isolatormay be more complex than that of the equivalent linearone In what follows a series of experiments are conductedto measure the negative stiffness and explore the dynamicresponses of the designed electromagnetic vibration isolator
4 Experimental Studies
This section describes a series of experimental tests that wereconducted to validate the negative stiffness characteristic ofthe EATS and investigate the isolation performance of theEVI with or without excitation current Two experimentaltests weremainly performed (i) frequency sweeps in the base
Shock and Vibration 7
Adjusting knob
Plate
Top cap
Mechanical spring
Screw thread Mechanism
(a) (b)
Figure 8 Regulating mechanism of active cell position
Overall force for
Electromagnetic
times10minus3
minus30
minus20
minus10
0
10
20
30
Fe
(N)
0 05x (m)
15minus15 minus05 1 2minus1minus2
kl = 435G
I = 06 11 15
15 11 06
force for I =
Figure 9 Force and displacement curves of the EATS for variouscurrent
excitation frequency while holding base harmonic excitationvelocity constant and (ii) isolation performances of the EVIsystem under single frequency harmonic excitation
In this section a numerical simulation corresponding tothe experimental test is also carried out for two reasons (i)supporting the experimental results and (ii) quantifying theinfluence of the current on the damping ratio due to theimperfect fabrication
A simple analysis is conducted here to show how thenumerical results are obtained Assuming the vertical baseexcitation is 119909119890 = 119883119890 cos (120596119890119905) dynamic equation of theisolation system can be written as
119898119905 + 119888 (119905 minus 119890) + 119896119897 (119909119905 minus 119909119890) + 119865 = 0 (15)
where 119909119905 is the displacement response of the isolated mass119888 is the damping and 119865 is the electromagnetic force whichcan be obtained from (14) We introduce the nondimensionalparameters
119910 = (119909119905 minus 119909119890)(119883119890120596) 120577 = 1198882119898Ω
120596 = 120596119890Ω 120591 = Ω119905
Ω2 = 119896119897119898(16)
Equation (15) can be rewritten in nondimensional formas
11991010158401015840 + 21205771199101015840 + 119910 + 119865119883119890120596119896119897 = 120596 cos (120596120591) (17)
where 119865 is the nondimensional form of (14) In the numericalanalysis only the primary resonance case is considered thusthe solution of (17) can be assumed as 119884 cos (120596120591 + 120579) Thetransmissibility of the isolation system corresponding to (17)can be derived as
119879 = radic1 + 12059621198842 + 2120596119884 cos 120579 (18)
Based on the above analysis the numerical transmissibil-ity results can be obtained by the fourth-order Runge-Kuttamethod and the fast Fourier transform
Figure 10 shows the experimental setup and schematicdiagram used in experimental testsThe isolator was poweredby a DC power source and harmonically excited by an ES-10-240 shaker produced by Dongling Vibration Test InstrumentCo Ltd China The accelerations of the base excitationand the isolated mass were measured by two CA-YD-127acceleration transducers produced by Sinocera PiezotronicsInc China A PC connected with a 3053-B data acquisitionproduced by Bruel amp Kjaeligr was used to collect and processacceleration response signals In addition there are severalimportant points needed to be addressed First of all theactive cell of the isolator was made by electrical pure ironand can be regarded as the isolated mass thus no additionalisolatedmass wasmounted on the isolator and nomechanicalspring denoted by 11989611 was placed between the plate andthe top cap Furthermore when the DC power source wasturned off there was no electromagnetic stiffness and only
8 Shock and Vibration
Acceleration Sensor
DC Power SourceVibrator
PULSE
Isolator
PC
(a)
Acceleration Sensor
Vibrator
Isolator
(b)
Power Source
Isolator Acceleration Sensor
Vibrator
PULSE
Power Amplifier
(c)
Figure 10 Experimental setup used in experimental tests (a) primary equipment (b) test rig and (c) schematic diagram
the mechanical springs worked At last compared with thedisplacement the amplitude of the velocity was much easierto hold Therefore the amplitude of velocity was holdingconstant during the upward frequency sweep experimentsThe frequency of the base excitation linearly varied from 5Hzto 60Hz in 10 seconds
In Section 2 the analytical electromagnetic force is shownas (14) In order to calculate the negative stiffness near theequilibrium position a third-order polynomial is applied tofit the theoretical results and the linear term of the fittingpolynomial is the negative stiffnessTherefore the theoreticalresonance frequency of the isolation system can be calculatedby
119891119905 = 12120587radic119896119897 + 119896119899119898 (19)
where119898 is the isolated mass and 119896119899 means the linear term ofthe negative stiffness In the experiment the isolated mass is204 kg which consists of four parts the active cell the shaft
the plate and the acceleration transducerTheoverall stiffnessof the mechanical springs 119896119897 is 435Nmm
Experimental acceleration and transmissibility curvesfrom frequency sweeps are depicted in Figure 11 in which119868 is the magnitude of the current applied into the isolatorThe velocity is 32 times 10minus3ms which can be calculated bydividing the acceleration by the circular frequency Besidesthe numerical transmissibility results for various magnitudesof the current are also plotted in Figure 11(b) in which theasterisks represent the numerical results for damping ratio120577 = 004 and the circles refer to the numerical results whosedamping ratio is almost the same as that of the experimentalresults It should be pointed out that the damping ratioof 004 is not obtained by experimental measurements butrather by numerical calculations When the DC power isturned off the electromagnetic asymmetric tooth structuredoes not work and the system can be regarded as a linearsystem If the damping ratio is 004 the numerical resultsof the linear system compare well with that measured byexperimental tests for no current Thus the damping ratioin experimental tests can be regarded as 004 to a certain
Shock and Vibration 9
No current
Base excitation90
100
110
120
130
140Ac
celeration
(dB)
15 20 25 30 35 4010Frequency (Hz)
I = 06AI = 08A I = 03A
(a)
No current
0
5
10
15
Tran
smissibility
15 20 25 30 35 4010Frequency (Hz)
I = 06A
I = 08A I = 03A
(b)
Figure 11 Experimental acceleration and transmissibility curves from frequency sweeps (a) acceleration response and (b) transmissibility
Table 3 Comparison of the theoretical resonance frequency and the experimental resonance frequency for various current
Current (A) Theoretical resonance frequency (Hz) Experimental resonance frequency (Hz) Error ratio ()0 2324 2325 00403 2251 2250 00404 2193 2200 03205 2116 2125 04206 2017 2025 04007 1894 1925 16108 1741 1700 241
degree It can be seen that the experimental results comparewell with the numerical results when the magnitude of theapplied current is 03 A However when the magnitude ofthe current increases to 06 A the peak transmissibility ofthe experimental results is a little lower than that of thenumerical results this is because that a radial electromagneticforce exists between the active cell and the stator due tothe imperfect concentricity and it increases the dampingforce between the top cap and the shaft The green circlesrepresent the numerical results for 120577 = 0045 In thiscase the peak transmissibility of the numerical simulation isalmost the same as that of the experimental measurementSimilar but more obvious phenomenon can also be foundin the case of 119868 = 08A In this case the red circles referto the numerical results for 120577 = 009 It should also benoted that the comparison of the numerical results and theexperimental results is not very good at some frequenciesIt is probably because that some other kinds of dampingforces exist in the isolation system such as the dampingforce inside the linear bearing when the current is beingapplied
It can be known from Figure 11 that the experimentalresonance frequency of the linear case is 2324Hz whichis identical with the theoretical result corresponding to(19) After applying a current of 03 A to the system theEATS works and there is a negative stiffness to weaken themechanical stiffness Therefore the experimental resonancefrequency is reduced to 2250Hz which is consistent withthe theoretical result 2251Hz It can also been known fromFigure 11 that the resonance frequency becomes smalleras the current increases This is because a higher currentleads to a larger negative stiffness and a smaller overallstiffness
Table 3 gives the detailed comparison of the theoreticalresonance frequency and the experimental resonance fre-quency for various current The error ratio is defined as
119890 = 1003816100381610038161003816119891119905 minus 1198911198981003816100381610038161003816119891119898 times 100 (20)
where 119891119898 is the experimental resonance frequency FromTable 3 it can be known that the theoretical frequencies forvarious current compare well with the measured results
The analysis in Table 3 has confirmed that the derivedanalytical electromagnetic force is accurate enough and theproposed EATS is able to provide a variable negative stiffnessnear the equilibrium position Another phenomenon whichshould be noted is that the isolation performance of theisolator with current is better than that of the isolator withoutcurrent in low frequency range In order to show this phe-nomenon better the isolation response of the isolator withand without the current under single frequency harmonicexcitation was measured Considering the response curvesshown in Figure 11 23Hz and 34Hz were taken as the testfrequency separately
When the excitation frequency of the system is 23Hz themeasured acceleration results of the isolator are shown in Fig-ure 12 For better comparison of the isolation performancebase excitation curve is also plotted When the DC power isturned off the amplitude of the acceleration of the isolator ismuch larger than that of the base excitation This is becausethe excitation frequency of 23Hz is close to the resonancefrequency of 2325Hz After turning on the DC power itis interesting to find out that the acceleration amplitudeof the isolator at this frequency reduces from 30341ms2to 3495ms2 Thus the maximum displacement reduces
10 Shock and Vibration
Base excitationNo current
minus60minus40minus20
0204060
Acceleration
(ms
2)
02 04 06 080 1Time (s)
I = 06A(a)
05
101520253035
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
1648ms23495ms2
30341ms2
Base excitationNo currentI = 06A
(b)
Figure 12 Isolation performance of the isolator for a base excitation frequency of 23Hz (a) time domain and (b) frequency domain
minus6minus4minus2
0246
Acceleration
(ms
2)
01 02 03 04 05 060Time (s)
Base excitationNo currentI = 06A
(a)
0
1
2
3
4
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
2935ms2 3263ms2
1403ms2
Base excitationNo currentI = 06A
(b)
Figure 13 Isolation performance of the isolator for a base excitation frequency of 34Hz (a) time domain and (b) frequency domain
from 145mm to 017mm and the isolation performancebecomes much better than that of the former case Similarphenomenon can be observed in the experimental tests at thefrequency of 34Hz shown in Figure 13 At this frequencythe acceleration magnitude of the isolator without currentapplied is almost equal to that of the base excitation and theisolator has no vibration isolation effect However when acurrent of 06 A is applied to the isolator there is an accel-eration magnitude reduction of 1860ms2 at this frequencyThis is because the negative stiffness provided by the EATSweakens the overall mechanical stiffness therefore boththe resonance frequency and the initial isolation frequencybecome lower
The above investigation has confirmed the variable neg-ative stiffness provided by the EATS however there are stillsome unfavorable phenomenona which can be observed dur-ing the experimental tests The first one is that the dampingratio becomes larger with the increase of the current Aswe all know a larger damping ratio is beneficial for thevibration isolation in low level frequency range however it isunfavorable for the vibration isolation in high level frequencyrange The reason for this is that there is a contact frictionbetween the top cap and the shaft This is also why no staticforce measurements and sweep frequency experiments forlarge current are conducted in this paper Another one is thatthere are some fluctuations in the measured results shownin Figure 11 This is because the base excitation provided by
the shaker more or less has some small fluctuations in theinitial sweep frequency range and the isolator amplifies suchfluctuations in the low level frequency range
5 Conclusions
This paper mainly describes a new approach to achievevariable negative stiffnessThe negative stiffness is realized byan electromagnetic asymmetricmagnetic tooth structure andcan be changed by adjusting themagnitude of the input directcurrent Analytical electromagnetic force model of the EATSis built and then validated by comparing with the simulationresults An electromagnetic vibration isolator is designedusing the EATS and tested by a series of dynamical experi-ments During the experiments the negative stiffness of theEATS can be changed by adjusting the current which leads tothe variation of the resonance frequency The results confirmthe negative stiffness provided by the EATS and demonstratethat the theoretical resonance frequencies calculated by thederived electromagnetic force equation compare very wellwith the experimental resonance frequencies For the currentof 06 A the resonance frequency of the isolator reducesfrom 2325Hz to 2025Hz and the acceleration amplitudeof the isolator reduces from 30341ms2 to 3495ms2 at thefrequency of 23Hz It indicates that the negative stiffnessprovided by the EATS is beneficial for vibration isola-tion
Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

4 Shock and Vibration
(a) (b)
Stator
Active cell
x
l dl
w
w
g
kdl
kl
Λc
Λa
Λb
x w
w
Λa
Λb
Figure 3 Air gap partition of a mechanical unit with negative stiffness
(a) 0mm (b) 05mm (c) 35mm
Figure 4 Magnetic fields of EATS for different active cell positions for 119868 = 06A
= 21205830119903120587 minus 2 [120587 ln(1 + 119908119892 + 119909)+ (120587 minus 4) ln(1 + 1205871199082119892 + 120587119909)]
(11)
Therefore the overall magnetic conductance of the magneticcircuit shown in Figure 3(b) is
Λ 1198902 = Λ 119886 + Λ 119887 = 41205830119903120587 minus 2 [120587 ln(1 + 119908119892 + 119909)+ (120587 minus 4) ln(1 + 1205871199082119892 + 120587119909)]
(12)
and the electromagnetic force 1198651198902 is1198651198902 = minus(119873119868)28 120597Λ 1198902120597119909
= 1205871199081205830119903 (119873119868)22 (120587 minus 2) [ 1(119908 + 119892 + 119909) (119892 + 119909)minus 120587 (4 minus 120587)(120587119908 + 2119892 + 120587119909) (2119892 + 120587119909)]
(13)
Combining (3) (10) and (13) the overall electromagneticforce of the EATS is obtained by
119865 = sgn (119909) 1205871205830119903 (119873119868)2 [minus 1119892
Shock and Vibration 5
Table 1 Simulation parameters
Parameter ValueTooth width 4mmTooth space 4mmWidth of gap 03mmCoil current 06 ACoil turns 190Permeability material DT4-C
+ 2120587 minus 2 ( 1119892 + 119908 minus |119909| minus 4 minus 1205872119892 + 120587119908 minus 120587 |119909|)]+ 21205871199081205830119903 (119873119868)2120587 minus 2 [ 1(119908 + 119892 + |119909|) (119892 + |119909|)minus 120587 (4 minus 120587)(120587119908 + 2119892 + 120587 |119909|) (2119892 + 120587 |119909|)]
(14)
where sgn(∙) is the sign function
23 Simulation of the EATS In order to validate the negativestiffness of the EATS and demonstrate the correctness ofthe analytical electromagnetic force a series of simulationsof the EATS are conducted Figure 4 shows the simplifiedsimulation model and the distribution of the magnetic fluxfor different active cell positions for a current of 06 A Table 1depicts the parameters used in simulations by using finiteelement software
When the active cell rightly stays at the equilibrium posi-tion the magnetic field of the EATS is shown in Figure 4(a)The magnetic fluxes from every tooth of the active cell flowinto two teeth of the stator therefore there are two forceswhich exist between one active cell tooth and two statorteeth The overall electromagnetic force of the EATS is zeroand the system is quasi-stable When the active cell movesupwards 05mm shown in Figure 4(b) the distribution ofthe magnetic flux from one active cell tooth to two statorteeth is changed The magnetic flux of the upper close statortooth becomes larger and that of the lower close stator toothis contrary thus the direction of the overall electromagneticforce is also upward same as the moving direction of theactive cell and the system is unstable When the active cellmoves upwards 35mm above the equilibrium position it isinteresting that the magnetic field of the EATS is similar tothat of the traditional tooth structure with positive stiffnesscharacteristic and detailed analysis can be found in [22]
Table 2 shows the parameters used in analytical calcula-tion of the electromagnetic force Substituting the parametersshown in Table 2 to (14) leads to the analytical electromag-netic force and the results are shown in Figure 5 Besidesthe simulation results for various current are also plotted inFigure 5 to compare with the analytical solutions
It can be seen from Figure 5 that the analytical solutionscalculated by (14) match well with the simulation resultsFurthermore it is demonstrated that the EATS can provide
Table 2 Parameters of analytical electromagnetic force
Parameter Value1205830
4120587 times 10minus7119903 395mm119873 190119868 05 A06 A07 A119892 03mm119908 4mm
8
6
4
2
0
minus2
minus4
minus6
minus8
Fe(
)
Simulationresults
Analyticalsolutions
times10minus3
43210minus1minus2minus3minus4
05A06A07A
05A06A07A
x (m)
Figure 5 Electromagnetic force of the EATS for various current
an electromagnetic force with negative stiffness near theequilibrium position and the magnitude of the force can bechanged by adjusting the coil current Another importantphenomenon which should be noted is that the electromag-netic force provided by the EATS has piecewise characteristicand the stiffness will become positive if the active cell has alarge displacement
3 Application of the EATS
In an effort to capture the negative stiffness characteristicof the EATS in the following experimental tests the EATSis applied to vibration isolation and an electromagneticvibration isolator (EVI) is proposed in this section
31 Basic Configuration of the EVI The schematic struc-ture and 3D configuration of the designed electromagneticvibration isolator is depicted in Figure 6 Figure 7 showsthe photograph of the components of the EVI The isolatormainly includes two components mechanical coil springsused to provide positive stiffness and electromagnetic asym-metric tooth structure used to provide negative stiffness Themechanical springs consist of three types of coil springssymbolized by 11989611 11989612 and 11989613 separately One mechanicalspring denoted by 11989612 and four mechanical springs alldenoted by 11989613 are employed to maintain the active cell at
6 Shock and Vibration
MASS
Stator
Coil
ActiveCell
k11
k12
k13
(a)
Plate
Coils
Active cell
StatorAxis
Mechanical springs
Shaft
Linear bearing
Top cap
Base
(b)
Figure 6 Scheme and 3D configuration of EVI (a) schematic diagram and (b) 3D configuration
Plate
Shaft
Active cell
Stator Axis
Coils
SpringsTop cap Base
Figure 7 Photograph of the components of the EVI
the desired position when no electric power is applied andno additional isolated mass is added The mechanical coilsprings symbolized by 11989611 placed between the plate and thecylinder body are only used to balance the additional massand provide positive vertical stiffness in future applicationA linear bearing is placed between the active cell and theaxis for the purpose of maintaining the concentricity of theactive cell and the stator It should be noted that the staticstiffness depends only on the mechanical coil springs whilethe dynamic stiffness comes from the combined effect of themechanical springs and the electromagnetic tooth structure
It can be known from [23] that a mistuningmass will leadto a much more complex dynamic response of the systemThus a regulating mechanism of the active cell positionshown in Figure 8 is designed to solve this problem
The regulating mechanism can adjust the position ofthe active cell by changing the precompression of theintermediate spring When the position of the active cellneeds to be adjusted an adjusting knob is inserted into thescrew thread mechanism and can be rotated clockwise oranticlockwise to adjust the upper end of the mechanical
spring It should be noted that the adjusting knob should bedesigned horizontally in future practical application for thereason that the isolated mass will be mounted on the plate
32 Stiffness Characteristics of the EVI Figure 9 depictsthe force and displacement curves of the EATS for vari-ous current meanwhile the force characteristic curve ofmechanical springs is also plotted for comparison In the neararea of the equilibrium position the electromagnetic forceprovided by the EATS has a negative stiffness characteristicand the overall stiffness of the mechanical springs is reducedThe electromagnetic force becomes larger when the currentincreasesTheoverall forcewill be zero if the current increasesto 11 A because the electromagnetic force is equal to themechanical spring force When the current exceeds 11 A theoverall force will have a negative stiffness characteristic nearthe equilibriumposition and the active cell cannot be broughtback to the equilibrium position by the mechanical springswhich is quite unfavorable in practical application
However there are still some imperfect aspects of thedesign that should be noted For example the range of thenegative stiffness is limited to (minus2mm 2mm) which is quitesmall compared with that of [18] Moreover the negativestiffness provided by the EATS has a very obvious nonlinearcharacteristic thus the dynamic behaviors of the isolatormay be more complex than that of the equivalent linearone In what follows a series of experiments are conductedto measure the negative stiffness and explore the dynamicresponses of the designed electromagnetic vibration isolator
4 Experimental Studies
This section describes a series of experimental tests that wereconducted to validate the negative stiffness characteristic ofthe EATS and investigate the isolation performance of theEVI with or without excitation current Two experimentaltests weremainly performed (i) frequency sweeps in the base
Shock and Vibration 7
Adjusting knob
Plate
Top cap
Mechanical spring
Screw thread Mechanism
(a) (b)
Figure 8 Regulating mechanism of active cell position
Overall force for
Electromagnetic
times10minus3
minus30
minus20
minus10
0
10
20
30
Fe
(N)
0 05x (m)
15minus15 minus05 1 2minus1minus2
kl = 435G
I = 06 11 15
15 11 06
force for I =
Figure 9 Force and displacement curves of the EATS for variouscurrent
excitation frequency while holding base harmonic excitationvelocity constant and (ii) isolation performances of the EVIsystem under single frequency harmonic excitation
In this section a numerical simulation corresponding tothe experimental test is also carried out for two reasons (i)supporting the experimental results and (ii) quantifying theinfluence of the current on the damping ratio due to theimperfect fabrication
A simple analysis is conducted here to show how thenumerical results are obtained Assuming the vertical baseexcitation is 119909119890 = 119883119890 cos (120596119890119905) dynamic equation of theisolation system can be written as
119898119905 + 119888 (119905 minus 119890) + 119896119897 (119909119905 minus 119909119890) + 119865 = 0 (15)
where 119909119905 is the displacement response of the isolated mass119888 is the damping and 119865 is the electromagnetic force whichcan be obtained from (14) We introduce the nondimensionalparameters
119910 = (119909119905 minus 119909119890)(119883119890120596) 120577 = 1198882119898Ω
120596 = 120596119890Ω 120591 = Ω119905
Ω2 = 119896119897119898(16)
Equation (15) can be rewritten in nondimensional formas
11991010158401015840 + 21205771199101015840 + 119910 + 119865119883119890120596119896119897 = 120596 cos (120596120591) (17)
where 119865 is the nondimensional form of (14) In the numericalanalysis only the primary resonance case is considered thusthe solution of (17) can be assumed as 119884 cos (120596120591 + 120579) Thetransmissibility of the isolation system corresponding to (17)can be derived as
119879 = radic1 + 12059621198842 + 2120596119884 cos 120579 (18)
Based on the above analysis the numerical transmissibil-ity results can be obtained by the fourth-order Runge-Kuttamethod and the fast Fourier transform
Figure 10 shows the experimental setup and schematicdiagram used in experimental testsThe isolator was poweredby a DC power source and harmonically excited by an ES-10-240 shaker produced by Dongling Vibration Test InstrumentCo Ltd China The accelerations of the base excitationand the isolated mass were measured by two CA-YD-127acceleration transducers produced by Sinocera PiezotronicsInc China A PC connected with a 3053-B data acquisitionproduced by Bruel amp Kjaeligr was used to collect and processacceleration response signals In addition there are severalimportant points needed to be addressed First of all theactive cell of the isolator was made by electrical pure ironand can be regarded as the isolated mass thus no additionalisolatedmass wasmounted on the isolator and nomechanicalspring denoted by 11989611 was placed between the plate andthe top cap Furthermore when the DC power source wasturned off there was no electromagnetic stiffness and only
8 Shock and Vibration
Acceleration Sensor
DC Power SourceVibrator
PULSE
Isolator
PC
(a)
Acceleration Sensor
Vibrator
Isolator
(b)
Power Source
Isolator Acceleration Sensor
Vibrator
PULSE
Power Amplifier
(c)
Figure 10 Experimental setup used in experimental tests (a) primary equipment (b) test rig and (c) schematic diagram
the mechanical springs worked At last compared with thedisplacement the amplitude of the velocity was much easierto hold Therefore the amplitude of velocity was holdingconstant during the upward frequency sweep experimentsThe frequency of the base excitation linearly varied from 5Hzto 60Hz in 10 seconds
In Section 2 the analytical electromagnetic force is shownas (14) In order to calculate the negative stiffness near theequilibrium position a third-order polynomial is applied tofit the theoretical results and the linear term of the fittingpolynomial is the negative stiffnessTherefore the theoreticalresonance frequency of the isolation system can be calculatedby
119891119905 = 12120587radic119896119897 + 119896119899119898 (19)
where119898 is the isolated mass and 119896119899 means the linear term ofthe negative stiffness In the experiment the isolated mass is204 kg which consists of four parts the active cell the shaft
the plate and the acceleration transducerTheoverall stiffnessof the mechanical springs 119896119897 is 435Nmm
Experimental acceleration and transmissibility curvesfrom frequency sweeps are depicted in Figure 11 in which119868 is the magnitude of the current applied into the isolatorThe velocity is 32 times 10minus3ms which can be calculated bydividing the acceleration by the circular frequency Besidesthe numerical transmissibility results for various magnitudesof the current are also plotted in Figure 11(b) in which theasterisks represent the numerical results for damping ratio120577 = 004 and the circles refer to the numerical results whosedamping ratio is almost the same as that of the experimentalresults It should be pointed out that the damping ratioof 004 is not obtained by experimental measurements butrather by numerical calculations When the DC power isturned off the electromagnetic asymmetric tooth structuredoes not work and the system can be regarded as a linearsystem If the damping ratio is 004 the numerical resultsof the linear system compare well with that measured byexperimental tests for no current Thus the damping ratioin experimental tests can be regarded as 004 to a certain
Shock and Vibration 9
No current
Base excitation90
100
110
120
130
140Ac
celeration
(dB)
15 20 25 30 35 4010Frequency (Hz)
I = 06AI = 08A I = 03A
(a)
No current
0
5
10
15
Tran
smissibility
15 20 25 30 35 4010Frequency (Hz)
I = 06A
I = 08A I = 03A
(b)
Figure 11 Experimental acceleration and transmissibility curves from frequency sweeps (a) acceleration response and (b) transmissibility
Table 3 Comparison of the theoretical resonance frequency and the experimental resonance frequency for various current
Current (A) Theoretical resonance frequency (Hz) Experimental resonance frequency (Hz) Error ratio ()0 2324 2325 00403 2251 2250 00404 2193 2200 03205 2116 2125 04206 2017 2025 04007 1894 1925 16108 1741 1700 241
degree It can be seen that the experimental results comparewell with the numerical results when the magnitude of theapplied current is 03 A However when the magnitude ofthe current increases to 06 A the peak transmissibility ofthe experimental results is a little lower than that of thenumerical results this is because that a radial electromagneticforce exists between the active cell and the stator due tothe imperfect concentricity and it increases the dampingforce between the top cap and the shaft The green circlesrepresent the numerical results for 120577 = 0045 In thiscase the peak transmissibility of the numerical simulation isalmost the same as that of the experimental measurementSimilar but more obvious phenomenon can also be foundin the case of 119868 = 08A In this case the red circles referto the numerical results for 120577 = 009 It should also benoted that the comparison of the numerical results and theexperimental results is not very good at some frequenciesIt is probably because that some other kinds of dampingforces exist in the isolation system such as the dampingforce inside the linear bearing when the current is beingapplied
It can be known from Figure 11 that the experimentalresonance frequency of the linear case is 2324Hz whichis identical with the theoretical result corresponding to(19) After applying a current of 03 A to the system theEATS works and there is a negative stiffness to weaken themechanical stiffness Therefore the experimental resonancefrequency is reduced to 2250Hz which is consistent withthe theoretical result 2251Hz It can also been known fromFigure 11 that the resonance frequency becomes smalleras the current increases This is because a higher currentleads to a larger negative stiffness and a smaller overallstiffness
Table 3 gives the detailed comparison of the theoreticalresonance frequency and the experimental resonance fre-quency for various current The error ratio is defined as
119890 = 1003816100381610038161003816119891119905 minus 1198911198981003816100381610038161003816119891119898 times 100 (20)
where 119891119898 is the experimental resonance frequency FromTable 3 it can be known that the theoretical frequencies forvarious current compare well with the measured results
The analysis in Table 3 has confirmed that the derivedanalytical electromagnetic force is accurate enough and theproposed EATS is able to provide a variable negative stiffnessnear the equilibrium position Another phenomenon whichshould be noted is that the isolation performance of theisolator with current is better than that of the isolator withoutcurrent in low frequency range In order to show this phe-nomenon better the isolation response of the isolator withand without the current under single frequency harmonicexcitation was measured Considering the response curvesshown in Figure 11 23Hz and 34Hz were taken as the testfrequency separately
When the excitation frequency of the system is 23Hz themeasured acceleration results of the isolator are shown in Fig-ure 12 For better comparison of the isolation performancebase excitation curve is also plotted When the DC power isturned off the amplitude of the acceleration of the isolator ismuch larger than that of the base excitation This is becausethe excitation frequency of 23Hz is close to the resonancefrequency of 2325Hz After turning on the DC power itis interesting to find out that the acceleration amplitudeof the isolator at this frequency reduces from 30341ms2to 3495ms2 Thus the maximum displacement reduces
10 Shock and Vibration
Base excitationNo current
minus60minus40minus20
0204060
Acceleration
(ms
2)
02 04 06 080 1Time (s)
I = 06A(a)
05
101520253035
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
1648ms23495ms2
30341ms2
Base excitationNo currentI = 06A
(b)
Figure 12 Isolation performance of the isolator for a base excitation frequency of 23Hz (a) time domain and (b) frequency domain
minus6minus4minus2
0246
Acceleration
(ms
2)
01 02 03 04 05 060Time (s)
Base excitationNo currentI = 06A
(a)
0
1
2
3
4
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
2935ms2 3263ms2
1403ms2
Base excitationNo currentI = 06A
(b)
Figure 13 Isolation performance of the isolator for a base excitation frequency of 34Hz (a) time domain and (b) frequency domain
from 145mm to 017mm and the isolation performancebecomes much better than that of the former case Similarphenomenon can be observed in the experimental tests at thefrequency of 34Hz shown in Figure 13 At this frequencythe acceleration magnitude of the isolator without currentapplied is almost equal to that of the base excitation and theisolator has no vibration isolation effect However when acurrent of 06 A is applied to the isolator there is an accel-eration magnitude reduction of 1860ms2 at this frequencyThis is because the negative stiffness provided by the EATSweakens the overall mechanical stiffness therefore boththe resonance frequency and the initial isolation frequencybecome lower
The above investigation has confirmed the variable neg-ative stiffness provided by the EATS however there are stillsome unfavorable phenomenona which can be observed dur-ing the experimental tests The first one is that the dampingratio becomes larger with the increase of the current Aswe all know a larger damping ratio is beneficial for thevibration isolation in low level frequency range however it isunfavorable for the vibration isolation in high level frequencyrange The reason for this is that there is a contact frictionbetween the top cap and the shaft This is also why no staticforce measurements and sweep frequency experiments forlarge current are conducted in this paper Another one is thatthere are some fluctuations in the measured results shownin Figure 11 This is because the base excitation provided by
the shaker more or less has some small fluctuations in theinitial sweep frequency range and the isolator amplifies suchfluctuations in the low level frequency range
5 Conclusions
This paper mainly describes a new approach to achievevariable negative stiffnessThe negative stiffness is realized byan electromagnetic asymmetricmagnetic tooth structure andcan be changed by adjusting themagnitude of the input directcurrent Analytical electromagnetic force model of the EATSis built and then validated by comparing with the simulationresults An electromagnetic vibration isolator is designedusing the EATS and tested by a series of dynamical experi-ments During the experiments the negative stiffness of theEATS can be changed by adjusting the current which leads tothe variation of the resonance frequency The results confirmthe negative stiffness provided by the EATS and demonstratethat the theoretical resonance frequencies calculated by thederived electromagnetic force equation compare very wellwith the experimental resonance frequencies For the currentof 06 A the resonance frequency of the isolator reducesfrom 2325Hz to 2025Hz and the acceleration amplitudeof the isolator reduces from 30341ms2 to 3495ms2 at thefrequency of 23Hz It indicates that the negative stiffnessprovided by the EATS is beneficial for vibration isola-tion
Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Shock and Vibration 5
Table 1 Simulation parameters
Parameter ValueTooth width 4mmTooth space 4mmWidth of gap 03mmCoil current 06 ACoil turns 190Permeability material DT4-C
+ 2120587 minus 2 ( 1119892 + 119908 minus |119909| minus 4 minus 1205872119892 + 120587119908 minus 120587 |119909|)]+ 21205871199081205830119903 (119873119868)2120587 minus 2 [ 1(119908 + 119892 + |119909|) (119892 + |119909|)minus 120587 (4 minus 120587)(120587119908 + 2119892 + 120587 |119909|) (2119892 + 120587 |119909|)]
(14)
where sgn(∙) is the sign function
23 Simulation of the EATS In order to validate the negativestiffness of the EATS and demonstrate the correctness ofthe analytical electromagnetic force a series of simulationsof the EATS are conducted Figure 4 shows the simplifiedsimulation model and the distribution of the magnetic fluxfor different active cell positions for a current of 06 A Table 1depicts the parameters used in simulations by using finiteelement software
When the active cell rightly stays at the equilibrium posi-tion the magnetic field of the EATS is shown in Figure 4(a)The magnetic fluxes from every tooth of the active cell flowinto two teeth of the stator therefore there are two forceswhich exist between one active cell tooth and two statorteeth The overall electromagnetic force of the EATS is zeroand the system is quasi-stable When the active cell movesupwards 05mm shown in Figure 4(b) the distribution ofthe magnetic flux from one active cell tooth to two statorteeth is changed The magnetic flux of the upper close statortooth becomes larger and that of the lower close stator toothis contrary thus the direction of the overall electromagneticforce is also upward same as the moving direction of theactive cell and the system is unstable When the active cellmoves upwards 35mm above the equilibrium position it isinteresting that the magnetic field of the EATS is similar tothat of the traditional tooth structure with positive stiffnesscharacteristic and detailed analysis can be found in [22]
Table 2 shows the parameters used in analytical calcula-tion of the electromagnetic force Substituting the parametersshown in Table 2 to (14) leads to the analytical electromag-netic force and the results are shown in Figure 5 Besidesthe simulation results for various current are also plotted inFigure 5 to compare with the analytical solutions
It can be seen from Figure 5 that the analytical solutionscalculated by (14) match well with the simulation resultsFurthermore it is demonstrated that the EATS can provide
Table 2 Parameters of analytical electromagnetic force
Parameter Value1205830
4120587 times 10minus7119903 395mm119873 190119868 05 A06 A07 A119892 03mm119908 4mm
8
6
4
2
0
minus2
minus4
minus6
minus8
Fe(
)
Simulationresults
Analyticalsolutions
times10minus3
43210minus1minus2minus3minus4
05A06A07A
05A06A07A
x (m)
Figure 5 Electromagnetic force of the EATS for various current
an electromagnetic force with negative stiffness near theequilibrium position and the magnitude of the force can bechanged by adjusting the coil current Another importantphenomenon which should be noted is that the electromag-netic force provided by the EATS has piecewise characteristicand the stiffness will become positive if the active cell has alarge displacement
3 Application of the EATS
In an effort to capture the negative stiffness characteristicof the EATS in the following experimental tests the EATSis applied to vibration isolation and an electromagneticvibration isolator (EVI) is proposed in this section
31 Basic Configuration of the EVI The schematic struc-ture and 3D configuration of the designed electromagneticvibration isolator is depicted in Figure 6 Figure 7 showsthe photograph of the components of the EVI The isolatormainly includes two components mechanical coil springsused to provide positive stiffness and electromagnetic asym-metric tooth structure used to provide negative stiffness Themechanical springs consist of three types of coil springssymbolized by 11989611 11989612 and 11989613 separately One mechanicalspring denoted by 11989612 and four mechanical springs alldenoted by 11989613 are employed to maintain the active cell at
6 Shock and Vibration
MASS
Stator
Coil
ActiveCell
k11
k12
k13
(a)
Plate
Coils
Active cell
StatorAxis
Mechanical springs
Shaft
Linear bearing
Top cap
Base
(b)
Figure 6 Scheme and 3D configuration of EVI (a) schematic diagram and (b) 3D configuration
Plate
Shaft
Active cell
Stator Axis
Coils
SpringsTop cap Base
Figure 7 Photograph of the components of the EVI
the desired position when no electric power is applied andno additional isolated mass is added The mechanical coilsprings symbolized by 11989611 placed between the plate and thecylinder body are only used to balance the additional massand provide positive vertical stiffness in future applicationA linear bearing is placed between the active cell and theaxis for the purpose of maintaining the concentricity of theactive cell and the stator It should be noted that the staticstiffness depends only on the mechanical coil springs whilethe dynamic stiffness comes from the combined effect of themechanical springs and the electromagnetic tooth structure
It can be known from [23] that a mistuningmass will leadto a much more complex dynamic response of the systemThus a regulating mechanism of the active cell positionshown in Figure 8 is designed to solve this problem
The regulating mechanism can adjust the position ofthe active cell by changing the precompression of theintermediate spring When the position of the active cellneeds to be adjusted an adjusting knob is inserted into thescrew thread mechanism and can be rotated clockwise oranticlockwise to adjust the upper end of the mechanical
spring It should be noted that the adjusting knob should bedesigned horizontally in future practical application for thereason that the isolated mass will be mounted on the plate
32 Stiffness Characteristics of the EVI Figure 9 depictsthe force and displacement curves of the EATS for vari-ous current meanwhile the force characteristic curve ofmechanical springs is also plotted for comparison In the neararea of the equilibrium position the electromagnetic forceprovided by the EATS has a negative stiffness characteristicand the overall stiffness of the mechanical springs is reducedThe electromagnetic force becomes larger when the currentincreasesTheoverall forcewill be zero if the current increasesto 11 A because the electromagnetic force is equal to themechanical spring force When the current exceeds 11 A theoverall force will have a negative stiffness characteristic nearthe equilibriumposition and the active cell cannot be broughtback to the equilibrium position by the mechanical springswhich is quite unfavorable in practical application
However there are still some imperfect aspects of thedesign that should be noted For example the range of thenegative stiffness is limited to (minus2mm 2mm) which is quitesmall compared with that of [18] Moreover the negativestiffness provided by the EATS has a very obvious nonlinearcharacteristic thus the dynamic behaviors of the isolatormay be more complex than that of the equivalent linearone In what follows a series of experiments are conductedto measure the negative stiffness and explore the dynamicresponses of the designed electromagnetic vibration isolator
4 Experimental Studies
This section describes a series of experimental tests that wereconducted to validate the negative stiffness characteristic ofthe EATS and investigate the isolation performance of theEVI with or without excitation current Two experimentaltests weremainly performed (i) frequency sweeps in the base
Shock and Vibration 7
Adjusting knob
Plate
Top cap
Mechanical spring
Screw thread Mechanism
(a) (b)
Figure 8 Regulating mechanism of active cell position
Overall force for
Electromagnetic
times10minus3
minus30
minus20
minus10
0
10
20
30
Fe
(N)
0 05x (m)
15minus15 minus05 1 2minus1minus2
kl = 435G
I = 06 11 15
15 11 06
force for I =
Figure 9 Force and displacement curves of the EATS for variouscurrent
excitation frequency while holding base harmonic excitationvelocity constant and (ii) isolation performances of the EVIsystem under single frequency harmonic excitation
In this section a numerical simulation corresponding tothe experimental test is also carried out for two reasons (i)supporting the experimental results and (ii) quantifying theinfluence of the current on the damping ratio due to theimperfect fabrication
A simple analysis is conducted here to show how thenumerical results are obtained Assuming the vertical baseexcitation is 119909119890 = 119883119890 cos (120596119890119905) dynamic equation of theisolation system can be written as
119898119905 + 119888 (119905 minus 119890) + 119896119897 (119909119905 minus 119909119890) + 119865 = 0 (15)
where 119909119905 is the displacement response of the isolated mass119888 is the damping and 119865 is the electromagnetic force whichcan be obtained from (14) We introduce the nondimensionalparameters
119910 = (119909119905 minus 119909119890)(119883119890120596) 120577 = 1198882119898Ω
120596 = 120596119890Ω 120591 = Ω119905
Ω2 = 119896119897119898(16)
Equation (15) can be rewritten in nondimensional formas
11991010158401015840 + 21205771199101015840 + 119910 + 119865119883119890120596119896119897 = 120596 cos (120596120591) (17)
where 119865 is the nondimensional form of (14) In the numericalanalysis only the primary resonance case is considered thusthe solution of (17) can be assumed as 119884 cos (120596120591 + 120579) Thetransmissibility of the isolation system corresponding to (17)can be derived as
119879 = radic1 + 12059621198842 + 2120596119884 cos 120579 (18)
Based on the above analysis the numerical transmissibil-ity results can be obtained by the fourth-order Runge-Kuttamethod and the fast Fourier transform
Figure 10 shows the experimental setup and schematicdiagram used in experimental testsThe isolator was poweredby a DC power source and harmonically excited by an ES-10-240 shaker produced by Dongling Vibration Test InstrumentCo Ltd China The accelerations of the base excitationand the isolated mass were measured by two CA-YD-127acceleration transducers produced by Sinocera PiezotronicsInc China A PC connected with a 3053-B data acquisitionproduced by Bruel amp Kjaeligr was used to collect and processacceleration response signals In addition there are severalimportant points needed to be addressed First of all theactive cell of the isolator was made by electrical pure ironand can be regarded as the isolated mass thus no additionalisolatedmass wasmounted on the isolator and nomechanicalspring denoted by 11989611 was placed between the plate andthe top cap Furthermore when the DC power source wasturned off there was no electromagnetic stiffness and only
8 Shock and Vibration
Acceleration Sensor
DC Power SourceVibrator
PULSE
Isolator
PC
(a)
Acceleration Sensor
Vibrator
Isolator
(b)
Power Source
Isolator Acceleration Sensor
Vibrator
PULSE
Power Amplifier
(c)
Figure 10 Experimental setup used in experimental tests (a) primary equipment (b) test rig and (c) schematic diagram
the mechanical springs worked At last compared with thedisplacement the amplitude of the velocity was much easierto hold Therefore the amplitude of velocity was holdingconstant during the upward frequency sweep experimentsThe frequency of the base excitation linearly varied from 5Hzto 60Hz in 10 seconds
In Section 2 the analytical electromagnetic force is shownas (14) In order to calculate the negative stiffness near theequilibrium position a third-order polynomial is applied tofit the theoretical results and the linear term of the fittingpolynomial is the negative stiffnessTherefore the theoreticalresonance frequency of the isolation system can be calculatedby
119891119905 = 12120587radic119896119897 + 119896119899119898 (19)
where119898 is the isolated mass and 119896119899 means the linear term ofthe negative stiffness In the experiment the isolated mass is204 kg which consists of four parts the active cell the shaft
the plate and the acceleration transducerTheoverall stiffnessof the mechanical springs 119896119897 is 435Nmm
Experimental acceleration and transmissibility curvesfrom frequency sweeps are depicted in Figure 11 in which119868 is the magnitude of the current applied into the isolatorThe velocity is 32 times 10minus3ms which can be calculated bydividing the acceleration by the circular frequency Besidesthe numerical transmissibility results for various magnitudesof the current are also plotted in Figure 11(b) in which theasterisks represent the numerical results for damping ratio120577 = 004 and the circles refer to the numerical results whosedamping ratio is almost the same as that of the experimentalresults It should be pointed out that the damping ratioof 004 is not obtained by experimental measurements butrather by numerical calculations When the DC power isturned off the electromagnetic asymmetric tooth structuredoes not work and the system can be regarded as a linearsystem If the damping ratio is 004 the numerical resultsof the linear system compare well with that measured byexperimental tests for no current Thus the damping ratioin experimental tests can be regarded as 004 to a certain
Shock and Vibration 9
No current
Base excitation90
100
110
120
130
140Ac
celeration
(dB)
15 20 25 30 35 4010Frequency (Hz)
I = 06AI = 08A I = 03A
(a)
No current
0
5
10
15
Tran
smissibility
15 20 25 30 35 4010Frequency (Hz)
I = 06A
I = 08A I = 03A
(b)
Figure 11 Experimental acceleration and transmissibility curves from frequency sweeps (a) acceleration response and (b) transmissibility
Table 3 Comparison of the theoretical resonance frequency and the experimental resonance frequency for various current
Current (A) Theoretical resonance frequency (Hz) Experimental resonance frequency (Hz) Error ratio ()0 2324 2325 00403 2251 2250 00404 2193 2200 03205 2116 2125 04206 2017 2025 04007 1894 1925 16108 1741 1700 241
degree It can be seen that the experimental results comparewell with the numerical results when the magnitude of theapplied current is 03 A However when the magnitude ofthe current increases to 06 A the peak transmissibility ofthe experimental results is a little lower than that of thenumerical results this is because that a radial electromagneticforce exists between the active cell and the stator due tothe imperfect concentricity and it increases the dampingforce between the top cap and the shaft The green circlesrepresent the numerical results for 120577 = 0045 In thiscase the peak transmissibility of the numerical simulation isalmost the same as that of the experimental measurementSimilar but more obvious phenomenon can also be foundin the case of 119868 = 08A In this case the red circles referto the numerical results for 120577 = 009 It should also benoted that the comparison of the numerical results and theexperimental results is not very good at some frequenciesIt is probably because that some other kinds of dampingforces exist in the isolation system such as the dampingforce inside the linear bearing when the current is beingapplied
It can be known from Figure 11 that the experimentalresonance frequency of the linear case is 2324Hz whichis identical with the theoretical result corresponding to(19) After applying a current of 03 A to the system theEATS works and there is a negative stiffness to weaken themechanical stiffness Therefore the experimental resonancefrequency is reduced to 2250Hz which is consistent withthe theoretical result 2251Hz It can also been known fromFigure 11 that the resonance frequency becomes smalleras the current increases This is because a higher currentleads to a larger negative stiffness and a smaller overallstiffness
Table 3 gives the detailed comparison of the theoreticalresonance frequency and the experimental resonance fre-quency for various current The error ratio is defined as
119890 = 1003816100381610038161003816119891119905 minus 1198911198981003816100381610038161003816119891119898 times 100 (20)
where 119891119898 is the experimental resonance frequency FromTable 3 it can be known that the theoretical frequencies forvarious current compare well with the measured results
The analysis in Table 3 has confirmed that the derivedanalytical electromagnetic force is accurate enough and theproposed EATS is able to provide a variable negative stiffnessnear the equilibrium position Another phenomenon whichshould be noted is that the isolation performance of theisolator with current is better than that of the isolator withoutcurrent in low frequency range In order to show this phe-nomenon better the isolation response of the isolator withand without the current under single frequency harmonicexcitation was measured Considering the response curvesshown in Figure 11 23Hz and 34Hz were taken as the testfrequency separately
When the excitation frequency of the system is 23Hz themeasured acceleration results of the isolator are shown in Fig-ure 12 For better comparison of the isolation performancebase excitation curve is also plotted When the DC power isturned off the amplitude of the acceleration of the isolator ismuch larger than that of the base excitation This is becausethe excitation frequency of 23Hz is close to the resonancefrequency of 2325Hz After turning on the DC power itis interesting to find out that the acceleration amplitudeof the isolator at this frequency reduces from 30341ms2to 3495ms2 Thus the maximum displacement reduces
10 Shock and Vibration
Base excitationNo current
minus60minus40minus20
0204060
Acceleration
(ms
2)
02 04 06 080 1Time (s)
I = 06A(a)
05
101520253035
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
1648ms23495ms2
30341ms2
Base excitationNo currentI = 06A
(b)
Figure 12 Isolation performance of the isolator for a base excitation frequency of 23Hz (a) time domain and (b) frequency domain
minus6minus4minus2
0246
Acceleration
(ms
2)
01 02 03 04 05 060Time (s)
Base excitationNo currentI = 06A
(a)
0
1
2
3
4
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
2935ms2 3263ms2
1403ms2
Base excitationNo currentI = 06A
(b)
Figure 13 Isolation performance of the isolator for a base excitation frequency of 34Hz (a) time domain and (b) frequency domain
from 145mm to 017mm and the isolation performancebecomes much better than that of the former case Similarphenomenon can be observed in the experimental tests at thefrequency of 34Hz shown in Figure 13 At this frequencythe acceleration magnitude of the isolator without currentapplied is almost equal to that of the base excitation and theisolator has no vibration isolation effect However when acurrent of 06 A is applied to the isolator there is an accel-eration magnitude reduction of 1860ms2 at this frequencyThis is because the negative stiffness provided by the EATSweakens the overall mechanical stiffness therefore boththe resonance frequency and the initial isolation frequencybecome lower
The above investigation has confirmed the variable neg-ative stiffness provided by the EATS however there are stillsome unfavorable phenomenona which can be observed dur-ing the experimental tests The first one is that the dampingratio becomes larger with the increase of the current Aswe all know a larger damping ratio is beneficial for thevibration isolation in low level frequency range however it isunfavorable for the vibration isolation in high level frequencyrange The reason for this is that there is a contact frictionbetween the top cap and the shaft This is also why no staticforce measurements and sweep frequency experiments forlarge current are conducted in this paper Another one is thatthere are some fluctuations in the measured results shownin Figure 11 This is because the base excitation provided by
the shaker more or less has some small fluctuations in theinitial sweep frequency range and the isolator amplifies suchfluctuations in the low level frequency range
5 Conclusions
This paper mainly describes a new approach to achievevariable negative stiffnessThe negative stiffness is realized byan electromagnetic asymmetricmagnetic tooth structure andcan be changed by adjusting themagnitude of the input directcurrent Analytical electromagnetic force model of the EATSis built and then validated by comparing with the simulationresults An electromagnetic vibration isolator is designedusing the EATS and tested by a series of dynamical experi-ments During the experiments the negative stiffness of theEATS can be changed by adjusting the current which leads tothe variation of the resonance frequency The results confirmthe negative stiffness provided by the EATS and demonstratethat the theoretical resonance frequencies calculated by thederived electromagnetic force equation compare very wellwith the experimental resonance frequencies For the currentof 06 A the resonance frequency of the isolator reducesfrom 2325Hz to 2025Hz and the acceleration amplitudeof the isolator reduces from 30341ms2 to 3495ms2 at thefrequency of 23Hz It indicates that the negative stiffnessprovided by the EATS is beneficial for vibration isola-tion
Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

6 Shock and Vibration
MASS
Stator
Coil
ActiveCell
k11
k12
k13
(a)
Plate
Coils
Active cell
StatorAxis
Mechanical springs
Shaft
Linear bearing
Top cap
Base
(b)
Figure 6 Scheme and 3D configuration of EVI (a) schematic diagram and (b) 3D configuration
Plate
Shaft
Active cell
Stator Axis
Coils
SpringsTop cap Base
Figure 7 Photograph of the components of the EVI
the desired position when no electric power is applied andno additional isolated mass is added The mechanical coilsprings symbolized by 11989611 placed between the plate and thecylinder body are only used to balance the additional massand provide positive vertical stiffness in future applicationA linear bearing is placed between the active cell and theaxis for the purpose of maintaining the concentricity of theactive cell and the stator It should be noted that the staticstiffness depends only on the mechanical coil springs whilethe dynamic stiffness comes from the combined effect of themechanical springs and the electromagnetic tooth structure
It can be known from [23] that a mistuningmass will leadto a much more complex dynamic response of the systemThus a regulating mechanism of the active cell positionshown in Figure 8 is designed to solve this problem
The regulating mechanism can adjust the position ofthe active cell by changing the precompression of theintermediate spring When the position of the active cellneeds to be adjusted an adjusting knob is inserted into thescrew thread mechanism and can be rotated clockwise oranticlockwise to adjust the upper end of the mechanical
spring It should be noted that the adjusting knob should bedesigned horizontally in future practical application for thereason that the isolated mass will be mounted on the plate
32 Stiffness Characteristics of the EVI Figure 9 depictsthe force and displacement curves of the EATS for vari-ous current meanwhile the force characteristic curve ofmechanical springs is also plotted for comparison In the neararea of the equilibrium position the electromagnetic forceprovided by the EATS has a negative stiffness characteristicand the overall stiffness of the mechanical springs is reducedThe electromagnetic force becomes larger when the currentincreasesTheoverall forcewill be zero if the current increasesto 11 A because the electromagnetic force is equal to themechanical spring force When the current exceeds 11 A theoverall force will have a negative stiffness characteristic nearthe equilibriumposition and the active cell cannot be broughtback to the equilibrium position by the mechanical springswhich is quite unfavorable in practical application
However there are still some imperfect aspects of thedesign that should be noted For example the range of thenegative stiffness is limited to (minus2mm 2mm) which is quitesmall compared with that of [18] Moreover the negativestiffness provided by the EATS has a very obvious nonlinearcharacteristic thus the dynamic behaviors of the isolatormay be more complex than that of the equivalent linearone In what follows a series of experiments are conductedto measure the negative stiffness and explore the dynamicresponses of the designed electromagnetic vibration isolator
4 Experimental Studies
This section describes a series of experimental tests that wereconducted to validate the negative stiffness characteristic ofthe EATS and investigate the isolation performance of theEVI with or without excitation current Two experimentaltests weremainly performed (i) frequency sweeps in the base
Shock and Vibration 7
Adjusting knob
Plate
Top cap
Mechanical spring
Screw thread Mechanism
(a) (b)
Figure 8 Regulating mechanism of active cell position
Overall force for
Electromagnetic
times10minus3
minus30
minus20
minus10
0
10
20
30
Fe
(N)
0 05x (m)
15minus15 minus05 1 2minus1minus2
kl = 435G
I = 06 11 15
15 11 06
force for I =
Figure 9 Force and displacement curves of the EATS for variouscurrent
excitation frequency while holding base harmonic excitationvelocity constant and (ii) isolation performances of the EVIsystem under single frequency harmonic excitation
In this section a numerical simulation corresponding tothe experimental test is also carried out for two reasons (i)supporting the experimental results and (ii) quantifying theinfluence of the current on the damping ratio due to theimperfect fabrication
A simple analysis is conducted here to show how thenumerical results are obtained Assuming the vertical baseexcitation is 119909119890 = 119883119890 cos (120596119890119905) dynamic equation of theisolation system can be written as
119898119905 + 119888 (119905 minus 119890) + 119896119897 (119909119905 minus 119909119890) + 119865 = 0 (15)
where 119909119905 is the displacement response of the isolated mass119888 is the damping and 119865 is the electromagnetic force whichcan be obtained from (14) We introduce the nondimensionalparameters
119910 = (119909119905 minus 119909119890)(119883119890120596) 120577 = 1198882119898Ω
120596 = 120596119890Ω 120591 = Ω119905
Ω2 = 119896119897119898(16)
Equation (15) can be rewritten in nondimensional formas
11991010158401015840 + 21205771199101015840 + 119910 + 119865119883119890120596119896119897 = 120596 cos (120596120591) (17)
where 119865 is the nondimensional form of (14) In the numericalanalysis only the primary resonance case is considered thusthe solution of (17) can be assumed as 119884 cos (120596120591 + 120579) Thetransmissibility of the isolation system corresponding to (17)can be derived as
119879 = radic1 + 12059621198842 + 2120596119884 cos 120579 (18)
Based on the above analysis the numerical transmissibil-ity results can be obtained by the fourth-order Runge-Kuttamethod and the fast Fourier transform
Figure 10 shows the experimental setup and schematicdiagram used in experimental testsThe isolator was poweredby a DC power source and harmonically excited by an ES-10-240 shaker produced by Dongling Vibration Test InstrumentCo Ltd China The accelerations of the base excitationand the isolated mass were measured by two CA-YD-127acceleration transducers produced by Sinocera PiezotronicsInc China A PC connected with a 3053-B data acquisitionproduced by Bruel amp Kjaeligr was used to collect and processacceleration response signals In addition there are severalimportant points needed to be addressed First of all theactive cell of the isolator was made by electrical pure ironand can be regarded as the isolated mass thus no additionalisolatedmass wasmounted on the isolator and nomechanicalspring denoted by 11989611 was placed between the plate andthe top cap Furthermore when the DC power source wasturned off there was no electromagnetic stiffness and only
8 Shock and Vibration
Acceleration Sensor
DC Power SourceVibrator
PULSE
Isolator
PC
(a)
Acceleration Sensor
Vibrator
Isolator
(b)
Power Source
Isolator Acceleration Sensor
Vibrator
PULSE
Power Amplifier
(c)
Figure 10 Experimental setup used in experimental tests (a) primary equipment (b) test rig and (c) schematic diagram
the mechanical springs worked At last compared with thedisplacement the amplitude of the velocity was much easierto hold Therefore the amplitude of velocity was holdingconstant during the upward frequency sweep experimentsThe frequency of the base excitation linearly varied from 5Hzto 60Hz in 10 seconds
In Section 2 the analytical electromagnetic force is shownas (14) In order to calculate the negative stiffness near theequilibrium position a third-order polynomial is applied tofit the theoretical results and the linear term of the fittingpolynomial is the negative stiffnessTherefore the theoreticalresonance frequency of the isolation system can be calculatedby
119891119905 = 12120587radic119896119897 + 119896119899119898 (19)
where119898 is the isolated mass and 119896119899 means the linear term ofthe negative stiffness In the experiment the isolated mass is204 kg which consists of four parts the active cell the shaft
the plate and the acceleration transducerTheoverall stiffnessof the mechanical springs 119896119897 is 435Nmm
Experimental acceleration and transmissibility curvesfrom frequency sweeps are depicted in Figure 11 in which119868 is the magnitude of the current applied into the isolatorThe velocity is 32 times 10minus3ms which can be calculated bydividing the acceleration by the circular frequency Besidesthe numerical transmissibility results for various magnitudesof the current are also plotted in Figure 11(b) in which theasterisks represent the numerical results for damping ratio120577 = 004 and the circles refer to the numerical results whosedamping ratio is almost the same as that of the experimentalresults It should be pointed out that the damping ratioof 004 is not obtained by experimental measurements butrather by numerical calculations When the DC power isturned off the electromagnetic asymmetric tooth structuredoes not work and the system can be regarded as a linearsystem If the damping ratio is 004 the numerical resultsof the linear system compare well with that measured byexperimental tests for no current Thus the damping ratioin experimental tests can be regarded as 004 to a certain
Shock and Vibration 9
No current
Base excitation90
100
110
120
130
140Ac
celeration
(dB)
15 20 25 30 35 4010Frequency (Hz)
I = 06AI = 08A I = 03A
(a)
No current
0
5
10
15
Tran
smissibility
15 20 25 30 35 4010Frequency (Hz)
I = 06A
I = 08A I = 03A
(b)
Figure 11 Experimental acceleration and transmissibility curves from frequency sweeps (a) acceleration response and (b) transmissibility
Table 3 Comparison of the theoretical resonance frequency and the experimental resonance frequency for various current
Current (A) Theoretical resonance frequency (Hz) Experimental resonance frequency (Hz) Error ratio ()0 2324 2325 00403 2251 2250 00404 2193 2200 03205 2116 2125 04206 2017 2025 04007 1894 1925 16108 1741 1700 241
degree It can be seen that the experimental results comparewell with the numerical results when the magnitude of theapplied current is 03 A However when the magnitude ofthe current increases to 06 A the peak transmissibility ofthe experimental results is a little lower than that of thenumerical results this is because that a radial electromagneticforce exists between the active cell and the stator due tothe imperfect concentricity and it increases the dampingforce between the top cap and the shaft The green circlesrepresent the numerical results for 120577 = 0045 In thiscase the peak transmissibility of the numerical simulation isalmost the same as that of the experimental measurementSimilar but more obvious phenomenon can also be foundin the case of 119868 = 08A In this case the red circles referto the numerical results for 120577 = 009 It should also benoted that the comparison of the numerical results and theexperimental results is not very good at some frequenciesIt is probably because that some other kinds of dampingforces exist in the isolation system such as the dampingforce inside the linear bearing when the current is beingapplied
It can be known from Figure 11 that the experimentalresonance frequency of the linear case is 2324Hz whichis identical with the theoretical result corresponding to(19) After applying a current of 03 A to the system theEATS works and there is a negative stiffness to weaken themechanical stiffness Therefore the experimental resonancefrequency is reduced to 2250Hz which is consistent withthe theoretical result 2251Hz It can also been known fromFigure 11 that the resonance frequency becomes smalleras the current increases This is because a higher currentleads to a larger negative stiffness and a smaller overallstiffness
Table 3 gives the detailed comparison of the theoreticalresonance frequency and the experimental resonance fre-quency for various current The error ratio is defined as
119890 = 1003816100381610038161003816119891119905 minus 1198911198981003816100381610038161003816119891119898 times 100 (20)
where 119891119898 is the experimental resonance frequency FromTable 3 it can be known that the theoretical frequencies forvarious current compare well with the measured results
The analysis in Table 3 has confirmed that the derivedanalytical electromagnetic force is accurate enough and theproposed EATS is able to provide a variable negative stiffnessnear the equilibrium position Another phenomenon whichshould be noted is that the isolation performance of theisolator with current is better than that of the isolator withoutcurrent in low frequency range In order to show this phe-nomenon better the isolation response of the isolator withand without the current under single frequency harmonicexcitation was measured Considering the response curvesshown in Figure 11 23Hz and 34Hz were taken as the testfrequency separately
When the excitation frequency of the system is 23Hz themeasured acceleration results of the isolator are shown in Fig-ure 12 For better comparison of the isolation performancebase excitation curve is also plotted When the DC power isturned off the amplitude of the acceleration of the isolator ismuch larger than that of the base excitation This is becausethe excitation frequency of 23Hz is close to the resonancefrequency of 2325Hz After turning on the DC power itis interesting to find out that the acceleration amplitudeof the isolator at this frequency reduces from 30341ms2to 3495ms2 Thus the maximum displacement reduces
10 Shock and Vibration
Base excitationNo current
minus60minus40minus20
0204060
Acceleration
(ms
2)
02 04 06 080 1Time (s)
I = 06A(a)
05
101520253035
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
1648ms23495ms2
30341ms2
Base excitationNo currentI = 06A
(b)
Figure 12 Isolation performance of the isolator for a base excitation frequency of 23Hz (a) time domain and (b) frequency domain
minus6minus4minus2
0246
Acceleration
(ms
2)
01 02 03 04 05 060Time (s)
Base excitationNo currentI = 06A
(a)
0
1
2
3
4
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
2935ms2 3263ms2
1403ms2
Base excitationNo currentI = 06A
(b)
Figure 13 Isolation performance of the isolator for a base excitation frequency of 34Hz (a) time domain and (b) frequency domain
from 145mm to 017mm and the isolation performancebecomes much better than that of the former case Similarphenomenon can be observed in the experimental tests at thefrequency of 34Hz shown in Figure 13 At this frequencythe acceleration magnitude of the isolator without currentapplied is almost equal to that of the base excitation and theisolator has no vibration isolation effect However when acurrent of 06 A is applied to the isolator there is an accel-eration magnitude reduction of 1860ms2 at this frequencyThis is because the negative stiffness provided by the EATSweakens the overall mechanical stiffness therefore boththe resonance frequency and the initial isolation frequencybecome lower
The above investigation has confirmed the variable neg-ative stiffness provided by the EATS however there are stillsome unfavorable phenomenona which can be observed dur-ing the experimental tests The first one is that the dampingratio becomes larger with the increase of the current Aswe all know a larger damping ratio is beneficial for thevibration isolation in low level frequency range however it isunfavorable for the vibration isolation in high level frequencyrange The reason for this is that there is a contact frictionbetween the top cap and the shaft This is also why no staticforce measurements and sweep frequency experiments forlarge current are conducted in this paper Another one is thatthere are some fluctuations in the measured results shownin Figure 11 This is because the base excitation provided by
the shaker more or less has some small fluctuations in theinitial sweep frequency range and the isolator amplifies suchfluctuations in the low level frequency range
5 Conclusions
This paper mainly describes a new approach to achievevariable negative stiffnessThe negative stiffness is realized byan electromagnetic asymmetricmagnetic tooth structure andcan be changed by adjusting themagnitude of the input directcurrent Analytical electromagnetic force model of the EATSis built and then validated by comparing with the simulationresults An electromagnetic vibration isolator is designedusing the EATS and tested by a series of dynamical experi-ments During the experiments the negative stiffness of theEATS can be changed by adjusting the current which leads tothe variation of the resonance frequency The results confirmthe negative stiffness provided by the EATS and demonstratethat the theoretical resonance frequencies calculated by thederived electromagnetic force equation compare very wellwith the experimental resonance frequencies For the currentof 06 A the resonance frequency of the isolator reducesfrom 2325Hz to 2025Hz and the acceleration amplitudeof the isolator reduces from 30341ms2 to 3495ms2 at thefrequency of 23Hz It indicates that the negative stiffnessprovided by the EATS is beneficial for vibration isola-tion
Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Shock and Vibration 7
Adjusting knob
Plate
Top cap
Mechanical spring
Screw thread Mechanism
(a) (b)
Figure 8 Regulating mechanism of active cell position
Overall force for
Electromagnetic
times10minus3
minus30
minus20
minus10
0
10
20
30
Fe
(N)
0 05x (m)
15minus15 minus05 1 2minus1minus2
kl = 435G
I = 06 11 15
15 11 06
force for I =
Figure 9 Force and displacement curves of the EATS for variouscurrent
excitation frequency while holding base harmonic excitationvelocity constant and (ii) isolation performances of the EVIsystem under single frequency harmonic excitation
In this section a numerical simulation corresponding tothe experimental test is also carried out for two reasons (i)supporting the experimental results and (ii) quantifying theinfluence of the current on the damping ratio due to theimperfect fabrication
A simple analysis is conducted here to show how thenumerical results are obtained Assuming the vertical baseexcitation is 119909119890 = 119883119890 cos (120596119890119905) dynamic equation of theisolation system can be written as
119898119905 + 119888 (119905 minus 119890) + 119896119897 (119909119905 minus 119909119890) + 119865 = 0 (15)
where 119909119905 is the displacement response of the isolated mass119888 is the damping and 119865 is the electromagnetic force whichcan be obtained from (14) We introduce the nondimensionalparameters
119910 = (119909119905 minus 119909119890)(119883119890120596) 120577 = 1198882119898Ω
120596 = 120596119890Ω 120591 = Ω119905
Ω2 = 119896119897119898(16)
Equation (15) can be rewritten in nondimensional formas
11991010158401015840 + 21205771199101015840 + 119910 + 119865119883119890120596119896119897 = 120596 cos (120596120591) (17)
where 119865 is the nondimensional form of (14) In the numericalanalysis only the primary resonance case is considered thusthe solution of (17) can be assumed as 119884 cos (120596120591 + 120579) Thetransmissibility of the isolation system corresponding to (17)can be derived as
119879 = radic1 + 12059621198842 + 2120596119884 cos 120579 (18)
Based on the above analysis the numerical transmissibil-ity results can be obtained by the fourth-order Runge-Kuttamethod and the fast Fourier transform
Figure 10 shows the experimental setup and schematicdiagram used in experimental testsThe isolator was poweredby a DC power source and harmonically excited by an ES-10-240 shaker produced by Dongling Vibration Test InstrumentCo Ltd China The accelerations of the base excitationand the isolated mass were measured by two CA-YD-127acceleration transducers produced by Sinocera PiezotronicsInc China A PC connected with a 3053-B data acquisitionproduced by Bruel amp Kjaeligr was used to collect and processacceleration response signals In addition there are severalimportant points needed to be addressed First of all theactive cell of the isolator was made by electrical pure ironand can be regarded as the isolated mass thus no additionalisolatedmass wasmounted on the isolator and nomechanicalspring denoted by 11989611 was placed between the plate andthe top cap Furthermore when the DC power source wasturned off there was no electromagnetic stiffness and only
8 Shock and Vibration
Acceleration Sensor
DC Power SourceVibrator
PULSE
Isolator
PC
(a)
Acceleration Sensor
Vibrator
Isolator
(b)
Power Source
Isolator Acceleration Sensor
Vibrator
PULSE
Power Amplifier
(c)
Figure 10 Experimental setup used in experimental tests (a) primary equipment (b) test rig and (c) schematic diagram
the mechanical springs worked At last compared with thedisplacement the amplitude of the velocity was much easierto hold Therefore the amplitude of velocity was holdingconstant during the upward frequency sweep experimentsThe frequency of the base excitation linearly varied from 5Hzto 60Hz in 10 seconds
In Section 2 the analytical electromagnetic force is shownas (14) In order to calculate the negative stiffness near theequilibrium position a third-order polynomial is applied tofit the theoretical results and the linear term of the fittingpolynomial is the negative stiffnessTherefore the theoreticalresonance frequency of the isolation system can be calculatedby
119891119905 = 12120587radic119896119897 + 119896119899119898 (19)
where119898 is the isolated mass and 119896119899 means the linear term ofthe negative stiffness In the experiment the isolated mass is204 kg which consists of four parts the active cell the shaft
the plate and the acceleration transducerTheoverall stiffnessof the mechanical springs 119896119897 is 435Nmm
Experimental acceleration and transmissibility curvesfrom frequency sweeps are depicted in Figure 11 in which119868 is the magnitude of the current applied into the isolatorThe velocity is 32 times 10minus3ms which can be calculated bydividing the acceleration by the circular frequency Besidesthe numerical transmissibility results for various magnitudesof the current are also plotted in Figure 11(b) in which theasterisks represent the numerical results for damping ratio120577 = 004 and the circles refer to the numerical results whosedamping ratio is almost the same as that of the experimentalresults It should be pointed out that the damping ratioof 004 is not obtained by experimental measurements butrather by numerical calculations When the DC power isturned off the electromagnetic asymmetric tooth structuredoes not work and the system can be regarded as a linearsystem If the damping ratio is 004 the numerical resultsof the linear system compare well with that measured byexperimental tests for no current Thus the damping ratioin experimental tests can be regarded as 004 to a certain
Shock and Vibration 9
No current
Base excitation90
100
110
120
130
140Ac
celeration
(dB)
15 20 25 30 35 4010Frequency (Hz)
I = 06AI = 08A I = 03A
(a)
No current
0
5
10
15
Tran
smissibility
15 20 25 30 35 4010Frequency (Hz)
I = 06A
I = 08A I = 03A
(b)
Figure 11 Experimental acceleration and transmissibility curves from frequency sweeps (a) acceleration response and (b) transmissibility
Table 3 Comparison of the theoretical resonance frequency and the experimental resonance frequency for various current
Current (A) Theoretical resonance frequency (Hz) Experimental resonance frequency (Hz) Error ratio ()0 2324 2325 00403 2251 2250 00404 2193 2200 03205 2116 2125 04206 2017 2025 04007 1894 1925 16108 1741 1700 241
degree It can be seen that the experimental results comparewell with the numerical results when the magnitude of theapplied current is 03 A However when the magnitude ofthe current increases to 06 A the peak transmissibility ofthe experimental results is a little lower than that of thenumerical results this is because that a radial electromagneticforce exists between the active cell and the stator due tothe imperfect concentricity and it increases the dampingforce between the top cap and the shaft The green circlesrepresent the numerical results for 120577 = 0045 In thiscase the peak transmissibility of the numerical simulation isalmost the same as that of the experimental measurementSimilar but more obvious phenomenon can also be foundin the case of 119868 = 08A In this case the red circles referto the numerical results for 120577 = 009 It should also benoted that the comparison of the numerical results and theexperimental results is not very good at some frequenciesIt is probably because that some other kinds of dampingforces exist in the isolation system such as the dampingforce inside the linear bearing when the current is beingapplied
It can be known from Figure 11 that the experimentalresonance frequency of the linear case is 2324Hz whichis identical with the theoretical result corresponding to(19) After applying a current of 03 A to the system theEATS works and there is a negative stiffness to weaken themechanical stiffness Therefore the experimental resonancefrequency is reduced to 2250Hz which is consistent withthe theoretical result 2251Hz It can also been known fromFigure 11 that the resonance frequency becomes smalleras the current increases This is because a higher currentleads to a larger negative stiffness and a smaller overallstiffness
Table 3 gives the detailed comparison of the theoreticalresonance frequency and the experimental resonance fre-quency for various current The error ratio is defined as
119890 = 1003816100381610038161003816119891119905 minus 1198911198981003816100381610038161003816119891119898 times 100 (20)
where 119891119898 is the experimental resonance frequency FromTable 3 it can be known that the theoretical frequencies forvarious current compare well with the measured results
The analysis in Table 3 has confirmed that the derivedanalytical electromagnetic force is accurate enough and theproposed EATS is able to provide a variable negative stiffnessnear the equilibrium position Another phenomenon whichshould be noted is that the isolation performance of theisolator with current is better than that of the isolator withoutcurrent in low frequency range In order to show this phe-nomenon better the isolation response of the isolator withand without the current under single frequency harmonicexcitation was measured Considering the response curvesshown in Figure 11 23Hz and 34Hz were taken as the testfrequency separately
When the excitation frequency of the system is 23Hz themeasured acceleration results of the isolator are shown in Fig-ure 12 For better comparison of the isolation performancebase excitation curve is also plotted When the DC power isturned off the amplitude of the acceleration of the isolator ismuch larger than that of the base excitation This is becausethe excitation frequency of 23Hz is close to the resonancefrequency of 2325Hz After turning on the DC power itis interesting to find out that the acceleration amplitudeof the isolator at this frequency reduces from 30341ms2to 3495ms2 Thus the maximum displacement reduces
10 Shock and Vibration
Base excitationNo current
minus60minus40minus20
0204060
Acceleration
(ms
2)
02 04 06 080 1Time (s)
I = 06A(a)
05
101520253035
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
1648ms23495ms2
30341ms2
Base excitationNo currentI = 06A
(b)
Figure 12 Isolation performance of the isolator for a base excitation frequency of 23Hz (a) time domain and (b) frequency domain
minus6minus4minus2
0246
Acceleration
(ms
2)
01 02 03 04 05 060Time (s)
Base excitationNo currentI = 06A
(a)
0
1
2
3
4
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
2935ms2 3263ms2
1403ms2
Base excitationNo currentI = 06A
(b)
Figure 13 Isolation performance of the isolator for a base excitation frequency of 34Hz (a) time domain and (b) frequency domain
from 145mm to 017mm and the isolation performancebecomes much better than that of the former case Similarphenomenon can be observed in the experimental tests at thefrequency of 34Hz shown in Figure 13 At this frequencythe acceleration magnitude of the isolator without currentapplied is almost equal to that of the base excitation and theisolator has no vibration isolation effect However when acurrent of 06 A is applied to the isolator there is an accel-eration magnitude reduction of 1860ms2 at this frequencyThis is because the negative stiffness provided by the EATSweakens the overall mechanical stiffness therefore boththe resonance frequency and the initial isolation frequencybecome lower
The above investigation has confirmed the variable neg-ative stiffness provided by the EATS however there are stillsome unfavorable phenomenona which can be observed dur-ing the experimental tests The first one is that the dampingratio becomes larger with the increase of the current Aswe all know a larger damping ratio is beneficial for thevibration isolation in low level frequency range however it isunfavorable for the vibration isolation in high level frequencyrange The reason for this is that there is a contact frictionbetween the top cap and the shaft This is also why no staticforce measurements and sweep frequency experiments forlarge current are conducted in this paper Another one is thatthere are some fluctuations in the measured results shownin Figure 11 This is because the base excitation provided by
the shaker more or less has some small fluctuations in theinitial sweep frequency range and the isolator amplifies suchfluctuations in the low level frequency range
5 Conclusions
This paper mainly describes a new approach to achievevariable negative stiffnessThe negative stiffness is realized byan electromagnetic asymmetricmagnetic tooth structure andcan be changed by adjusting themagnitude of the input directcurrent Analytical electromagnetic force model of the EATSis built and then validated by comparing with the simulationresults An electromagnetic vibration isolator is designedusing the EATS and tested by a series of dynamical experi-ments During the experiments the negative stiffness of theEATS can be changed by adjusting the current which leads tothe variation of the resonance frequency The results confirmthe negative stiffness provided by the EATS and demonstratethat the theoretical resonance frequencies calculated by thederived electromagnetic force equation compare very wellwith the experimental resonance frequencies For the currentof 06 A the resonance frequency of the isolator reducesfrom 2325Hz to 2025Hz and the acceleration amplitudeof the isolator reduces from 30341ms2 to 3495ms2 at thefrequency of 23Hz It indicates that the negative stiffnessprovided by the EATS is beneficial for vibration isola-tion
Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

8 Shock and Vibration
Acceleration Sensor
DC Power SourceVibrator
PULSE
Isolator
PC
(a)
Acceleration Sensor
Vibrator
Isolator
(b)
Power Source
Isolator Acceleration Sensor
Vibrator
PULSE
Power Amplifier
(c)
Figure 10 Experimental setup used in experimental tests (a) primary equipment (b) test rig and (c) schematic diagram
the mechanical springs worked At last compared with thedisplacement the amplitude of the velocity was much easierto hold Therefore the amplitude of velocity was holdingconstant during the upward frequency sweep experimentsThe frequency of the base excitation linearly varied from 5Hzto 60Hz in 10 seconds
In Section 2 the analytical electromagnetic force is shownas (14) In order to calculate the negative stiffness near theequilibrium position a third-order polynomial is applied tofit the theoretical results and the linear term of the fittingpolynomial is the negative stiffnessTherefore the theoreticalresonance frequency of the isolation system can be calculatedby
119891119905 = 12120587radic119896119897 + 119896119899119898 (19)
where119898 is the isolated mass and 119896119899 means the linear term ofthe negative stiffness In the experiment the isolated mass is204 kg which consists of four parts the active cell the shaft
the plate and the acceleration transducerTheoverall stiffnessof the mechanical springs 119896119897 is 435Nmm
Experimental acceleration and transmissibility curvesfrom frequency sweeps are depicted in Figure 11 in which119868 is the magnitude of the current applied into the isolatorThe velocity is 32 times 10minus3ms which can be calculated bydividing the acceleration by the circular frequency Besidesthe numerical transmissibility results for various magnitudesof the current are also plotted in Figure 11(b) in which theasterisks represent the numerical results for damping ratio120577 = 004 and the circles refer to the numerical results whosedamping ratio is almost the same as that of the experimentalresults It should be pointed out that the damping ratioof 004 is not obtained by experimental measurements butrather by numerical calculations When the DC power isturned off the electromagnetic asymmetric tooth structuredoes not work and the system can be regarded as a linearsystem If the damping ratio is 004 the numerical resultsof the linear system compare well with that measured byexperimental tests for no current Thus the damping ratioin experimental tests can be regarded as 004 to a certain
Shock and Vibration 9
No current
Base excitation90
100
110
120
130
140Ac
celeration
(dB)
15 20 25 30 35 4010Frequency (Hz)
I = 06AI = 08A I = 03A
(a)
No current
0
5
10
15
Tran
smissibility
15 20 25 30 35 4010Frequency (Hz)
I = 06A
I = 08A I = 03A
(b)
Figure 11 Experimental acceleration and transmissibility curves from frequency sweeps (a) acceleration response and (b) transmissibility
Table 3 Comparison of the theoretical resonance frequency and the experimental resonance frequency for various current
Current (A) Theoretical resonance frequency (Hz) Experimental resonance frequency (Hz) Error ratio ()0 2324 2325 00403 2251 2250 00404 2193 2200 03205 2116 2125 04206 2017 2025 04007 1894 1925 16108 1741 1700 241
degree It can be seen that the experimental results comparewell with the numerical results when the magnitude of theapplied current is 03 A However when the magnitude ofthe current increases to 06 A the peak transmissibility ofthe experimental results is a little lower than that of thenumerical results this is because that a radial electromagneticforce exists between the active cell and the stator due tothe imperfect concentricity and it increases the dampingforce between the top cap and the shaft The green circlesrepresent the numerical results for 120577 = 0045 In thiscase the peak transmissibility of the numerical simulation isalmost the same as that of the experimental measurementSimilar but more obvious phenomenon can also be foundin the case of 119868 = 08A In this case the red circles referto the numerical results for 120577 = 009 It should also benoted that the comparison of the numerical results and theexperimental results is not very good at some frequenciesIt is probably because that some other kinds of dampingforces exist in the isolation system such as the dampingforce inside the linear bearing when the current is beingapplied
It can be known from Figure 11 that the experimentalresonance frequency of the linear case is 2324Hz whichis identical with the theoretical result corresponding to(19) After applying a current of 03 A to the system theEATS works and there is a negative stiffness to weaken themechanical stiffness Therefore the experimental resonancefrequency is reduced to 2250Hz which is consistent withthe theoretical result 2251Hz It can also been known fromFigure 11 that the resonance frequency becomes smalleras the current increases This is because a higher currentleads to a larger negative stiffness and a smaller overallstiffness
Table 3 gives the detailed comparison of the theoreticalresonance frequency and the experimental resonance fre-quency for various current The error ratio is defined as
119890 = 1003816100381610038161003816119891119905 minus 1198911198981003816100381610038161003816119891119898 times 100 (20)
where 119891119898 is the experimental resonance frequency FromTable 3 it can be known that the theoretical frequencies forvarious current compare well with the measured results
The analysis in Table 3 has confirmed that the derivedanalytical electromagnetic force is accurate enough and theproposed EATS is able to provide a variable negative stiffnessnear the equilibrium position Another phenomenon whichshould be noted is that the isolation performance of theisolator with current is better than that of the isolator withoutcurrent in low frequency range In order to show this phe-nomenon better the isolation response of the isolator withand without the current under single frequency harmonicexcitation was measured Considering the response curvesshown in Figure 11 23Hz and 34Hz were taken as the testfrequency separately
When the excitation frequency of the system is 23Hz themeasured acceleration results of the isolator are shown in Fig-ure 12 For better comparison of the isolation performancebase excitation curve is also plotted When the DC power isturned off the amplitude of the acceleration of the isolator ismuch larger than that of the base excitation This is becausethe excitation frequency of 23Hz is close to the resonancefrequency of 2325Hz After turning on the DC power itis interesting to find out that the acceleration amplitudeof the isolator at this frequency reduces from 30341ms2to 3495ms2 Thus the maximum displacement reduces
10 Shock and Vibration
Base excitationNo current
minus60minus40minus20
0204060
Acceleration
(ms
2)
02 04 06 080 1Time (s)
I = 06A(a)
05
101520253035
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
1648ms23495ms2
30341ms2
Base excitationNo currentI = 06A
(b)
Figure 12 Isolation performance of the isolator for a base excitation frequency of 23Hz (a) time domain and (b) frequency domain
minus6minus4minus2
0246
Acceleration
(ms
2)
01 02 03 04 05 060Time (s)
Base excitationNo currentI = 06A
(a)
0
1
2
3
4
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
2935ms2 3263ms2
1403ms2
Base excitationNo currentI = 06A
(b)
Figure 13 Isolation performance of the isolator for a base excitation frequency of 34Hz (a) time domain and (b) frequency domain
from 145mm to 017mm and the isolation performancebecomes much better than that of the former case Similarphenomenon can be observed in the experimental tests at thefrequency of 34Hz shown in Figure 13 At this frequencythe acceleration magnitude of the isolator without currentapplied is almost equal to that of the base excitation and theisolator has no vibration isolation effect However when acurrent of 06 A is applied to the isolator there is an accel-eration magnitude reduction of 1860ms2 at this frequencyThis is because the negative stiffness provided by the EATSweakens the overall mechanical stiffness therefore boththe resonance frequency and the initial isolation frequencybecome lower
The above investigation has confirmed the variable neg-ative stiffness provided by the EATS however there are stillsome unfavorable phenomenona which can be observed dur-ing the experimental tests The first one is that the dampingratio becomes larger with the increase of the current Aswe all know a larger damping ratio is beneficial for thevibration isolation in low level frequency range however it isunfavorable for the vibration isolation in high level frequencyrange The reason for this is that there is a contact frictionbetween the top cap and the shaft This is also why no staticforce measurements and sweep frequency experiments forlarge current are conducted in this paper Another one is thatthere are some fluctuations in the measured results shownin Figure 11 This is because the base excitation provided by
the shaker more or less has some small fluctuations in theinitial sweep frequency range and the isolator amplifies suchfluctuations in the low level frequency range
5 Conclusions
This paper mainly describes a new approach to achievevariable negative stiffnessThe negative stiffness is realized byan electromagnetic asymmetricmagnetic tooth structure andcan be changed by adjusting themagnitude of the input directcurrent Analytical electromagnetic force model of the EATSis built and then validated by comparing with the simulationresults An electromagnetic vibration isolator is designedusing the EATS and tested by a series of dynamical experi-ments During the experiments the negative stiffness of theEATS can be changed by adjusting the current which leads tothe variation of the resonance frequency The results confirmthe negative stiffness provided by the EATS and demonstratethat the theoretical resonance frequencies calculated by thederived electromagnetic force equation compare very wellwith the experimental resonance frequencies For the currentof 06 A the resonance frequency of the isolator reducesfrom 2325Hz to 2025Hz and the acceleration amplitudeof the isolator reduces from 30341ms2 to 3495ms2 at thefrequency of 23Hz It indicates that the negative stiffnessprovided by the EATS is beneficial for vibration isola-tion
Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Shock and Vibration 9
No current
Base excitation90
100
110
120
130
140Ac
celeration
(dB)
15 20 25 30 35 4010Frequency (Hz)
I = 06AI = 08A I = 03A
(a)
No current
0
5
10
15
Tran
smissibility
15 20 25 30 35 4010Frequency (Hz)
I = 06A
I = 08A I = 03A
(b)
Figure 11 Experimental acceleration and transmissibility curves from frequency sweeps (a) acceleration response and (b) transmissibility
Table 3 Comparison of the theoretical resonance frequency and the experimental resonance frequency for various current
Current (A) Theoretical resonance frequency (Hz) Experimental resonance frequency (Hz) Error ratio ()0 2324 2325 00403 2251 2250 00404 2193 2200 03205 2116 2125 04206 2017 2025 04007 1894 1925 16108 1741 1700 241
degree It can be seen that the experimental results comparewell with the numerical results when the magnitude of theapplied current is 03 A However when the magnitude ofthe current increases to 06 A the peak transmissibility ofthe experimental results is a little lower than that of thenumerical results this is because that a radial electromagneticforce exists between the active cell and the stator due tothe imperfect concentricity and it increases the dampingforce between the top cap and the shaft The green circlesrepresent the numerical results for 120577 = 0045 In thiscase the peak transmissibility of the numerical simulation isalmost the same as that of the experimental measurementSimilar but more obvious phenomenon can also be foundin the case of 119868 = 08A In this case the red circles referto the numerical results for 120577 = 009 It should also benoted that the comparison of the numerical results and theexperimental results is not very good at some frequenciesIt is probably because that some other kinds of dampingforces exist in the isolation system such as the dampingforce inside the linear bearing when the current is beingapplied
It can be known from Figure 11 that the experimentalresonance frequency of the linear case is 2324Hz whichis identical with the theoretical result corresponding to(19) After applying a current of 03 A to the system theEATS works and there is a negative stiffness to weaken themechanical stiffness Therefore the experimental resonancefrequency is reduced to 2250Hz which is consistent withthe theoretical result 2251Hz It can also been known fromFigure 11 that the resonance frequency becomes smalleras the current increases This is because a higher currentleads to a larger negative stiffness and a smaller overallstiffness
Table 3 gives the detailed comparison of the theoreticalresonance frequency and the experimental resonance fre-quency for various current The error ratio is defined as
119890 = 1003816100381610038161003816119891119905 minus 1198911198981003816100381610038161003816119891119898 times 100 (20)
where 119891119898 is the experimental resonance frequency FromTable 3 it can be known that the theoretical frequencies forvarious current compare well with the measured results
The analysis in Table 3 has confirmed that the derivedanalytical electromagnetic force is accurate enough and theproposed EATS is able to provide a variable negative stiffnessnear the equilibrium position Another phenomenon whichshould be noted is that the isolation performance of theisolator with current is better than that of the isolator withoutcurrent in low frequency range In order to show this phe-nomenon better the isolation response of the isolator withand without the current under single frequency harmonicexcitation was measured Considering the response curvesshown in Figure 11 23Hz and 34Hz were taken as the testfrequency separately
When the excitation frequency of the system is 23Hz themeasured acceleration results of the isolator are shown in Fig-ure 12 For better comparison of the isolation performancebase excitation curve is also plotted When the DC power isturned off the amplitude of the acceleration of the isolator ismuch larger than that of the base excitation This is becausethe excitation frequency of 23Hz is close to the resonancefrequency of 2325Hz After turning on the DC power itis interesting to find out that the acceleration amplitudeof the isolator at this frequency reduces from 30341ms2to 3495ms2 Thus the maximum displacement reduces
10 Shock and Vibration
Base excitationNo current
minus60minus40minus20
0204060
Acceleration
(ms
2)
02 04 06 080 1Time (s)
I = 06A(a)
05
101520253035
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
1648ms23495ms2
30341ms2
Base excitationNo currentI = 06A
(b)
Figure 12 Isolation performance of the isolator for a base excitation frequency of 23Hz (a) time domain and (b) frequency domain
minus6minus4minus2
0246
Acceleration
(ms
2)
01 02 03 04 05 060Time (s)
Base excitationNo currentI = 06A
(a)
0
1
2
3
4
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
2935ms2 3263ms2
1403ms2
Base excitationNo currentI = 06A
(b)
Figure 13 Isolation performance of the isolator for a base excitation frequency of 34Hz (a) time domain and (b) frequency domain
from 145mm to 017mm and the isolation performancebecomes much better than that of the former case Similarphenomenon can be observed in the experimental tests at thefrequency of 34Hz shown in Figure 13 At this frequencythe acceleration magnitude of the isolator without currentapplied is almost equal to that of the base excitation and theisolator has no vibration isolation effect However when acurrent of 06 A is applied to the isolator there is an accel-eration magnitude reduction of 1860ms2 at this frequencyThis is because the negative stiffness provided by the EATSweakens the overall mechanical stiffness therefore boththe resonance frequency and the initial isolation frequencybecome lower
The above investigation has confirmed the variable neg-ative stiffness provided by the EATS however there are stillsome unfavorable phenomenona which can be observed dur-ing the experimental tests The first one is that the dampingratio becomes larger with the increase of the current Aswe all know a larger damping ratio is beneficial for thevibration isolation in low level frequency range however it isunfavorable for the vibration isolation in high level frequencyrange The reason for this is that there is a contact frictionbetween the top cap and the shaft This is also why no staticforce measurements and sweep frequency experiments forlarge current are conducted in this paper Another one is thatthere are some fluctuations in the measured results shownin Figure 11 This is because the base excitation provided by
the shaker more or less has some small fluctuations in theinitial sweep frequency range and the isolator amplifies suchfluctuations in the low level frequency range
5 Conclusions
This paper mainly describes a new approach to achievevariable negative stiffnessThe negative stiffness is realized byan electromagnetic asymmetricmagnetic tooth structure andcan be changed by adjusting themagnitude of the input directcurrent Analytical electromagnetic force model of the EATSis built and then validated by comparing with the simulationresults An electromagnetic vibration isolator is designedusing the EATS and tested by a series of dynamical experi-ments During the experiments the negative stiffness of theEATS can be changed by adjusting the current which leads tothe variation of the resonance frequency The results confirmthe negative stiffness provided by the EATS and demonstratethat the theoretical resonance frequencies calculated by thederived electromagnetic force equation compare very wellwith the experimental resonance frequencies For the currentof 06 A the resonance frequency of the isolator reducesfrom 2325Hz to 2025Hz and the acceleration amplitudeof the isolator reduces from 30341ms2 to 3495ms2 at thefrequency of 23Hz It indicates that the negative stiffnessprovided by the EATS is beneficial for vibration isola-tion
Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

10 Shock and Vibration
Base excitationNo current
minus60minus40minus20
0204060
Acceleration
(ms
2)
02 04 06 080 1Time (s)
I = 06A(a)
05
101520253035
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
1648ms23495ms2
30341ms2
Base excitationNo currentI = 06A
(b)
Figure 12 Isolation performance of the isolator for a base excitation frequency of 23Hz (a) time domain and (b) frequency domain
minus6minus4minus2
0246
Acceleration
(ms
2)
01 02 03 04 05 060Time (s)
Base excitationNo currentI = 06A
(a)
0
1
2
3
4
Acceleration
(ms
2)
10 20 30 40 50 60 70 80 90 1000Frequency (Hz)
2935ms2 3263ms2
1403ms2
Base excitationNo currentI = 06A
(b)
Figure 13 Isolation performance of the isolator for a base excitation frequency of 34Hz (a) time domain and (b) frequency domain
from 145mm to 017mm and the isolation performancebecomes much better than that of the former case Similarphenomenon can be observed in the experimental tests at thefrequency of 34Hz shown in Figure 13 At this frequencythe acceleration magnitude of the isolator without currentapplied is almost equal to that of the base excitation and theisolator has no vibration isolation effect However when acurrent of 06 A is applied to the isolator there is an accel-eration magnitude reduction of 1860ms2 at this frequencyThis is because the negative stiffness provided by the EATSweakens the overall mechanical stiffness therefore boththe resonance frequency and the initial isolation frequencybecome lower
The above investigation has confirmed the variable neg-ative stiffness provided by the EATS however there are stillsome unfavorable phenomenona which can be observed dur-ing the experimental tests The first one is that the dampingratio becomes larger with the increase of the current Aswe all know a larger damping ratio is beneficial for thevibration isolation in low level frequency range however it isunfavorable for the vibration isolation in high level frequencyrange The reason for this is that there is a contact frictionbetween the top cap and the shaft This is also why no staticforce measurements and sweep frequency experiments forlarge current are conducted in this paper Another one is thatthere are some fluctuations in the measured results shownin Figure 11 This is because the base excitation provided by
the shaker more or less has some small fluctuations in theinitial sweep frequency range and the isolator amplifies suchfluctuations in the low level frequency range
5 Conclusions
This paper mainly describes a new approach to achievevariable negative stiffnessThe negative stiffness is realized byan electromagnetic asymmetricmagnetic tooth structure andcan be changed by adjusting themagnitude of the input directcurrent Analytical electromagnetic force model of the EATSis built and then validated by comparing with the simulationresults An electromagnetic vibration isolator is designedusing the EATS and tested by a series of dynamical experi-ments During the experiments the negative stiffness of theEATS can be changed by adjusting the current which leads tothe variation of the resonance frequency The results confirmthe negative stiffness provided by the EATS and demonstratethat the theoretical resonance frequencies calculated by thederived electromagnetic force equation compare very wellwith the experimental resonance frequencies For the currentof 06 A the resonance frequency of the isolator reducesfrom 2325Hz to 2025Hz and the acceleration amplitudeof the isolator reduces from 30341ms2 to 3495ms2 at thefrequency of 23Hz It indicates that the negative stiffnessprovided by the EATS is beneficial for vibration isola-tion
Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Shock and Vibration 11
However it should be pointed out that there are stillseveral aspects which require further investigation First ofall some other methods of maintaining the concentricity ofthe active cell and the stator should be explored to reducethe damping ratio For example the linear bearing can bereplaced by the polytetrafluoroethylene slide bushMoreoverthe tooth parameters of the EATS should be further studiedto achieve a wider negative stiffness region and a smallernonlinearity Last but not least the isolation performanceof the isolator in large displacement situation should beinvestigated because the current negative stiffness region is alittle small for a practical applicationWhen the displacementof the active cell is larger than 2mm the stiffness becomespositive The effect of the piecewise stiffness on the dynamicresponse could be further studied to solve such problem
Conflicts of Interest
The authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
This work was supported by the National Natural ScienceFoundation of China (no 51775124)
References
[1] Y Wang S Li C Cheng and X Jiang ldquoDynamic analysisof a high-static-low-dynamic-stiffness vibration isolator withtime-delayed feedback controlrdquo Shock and Vibration vol 2015Article ID 712851 19 pages 2015
[2] H-J Ahn S-H Lim and C Park ldquoAn integrated design ofquasi-zero stiffness mechanismrdquo Journal of Mechanical Scienceand Technology vol 30 no 3 pp 1071ndash1075 2016
[3] Z Lu Y Tiejun M J Brennan Z Liu and L-Q Chen ldquoExperi-mental Investigation of a Two-Stage Nonlinear Vibration Isola-tion System with High- Static-Low-Dynamic Stiffnessrdquo Journalof Applied Mechanics vol 84 no 2 Article ID 021001 2017
[4] T D Le and K K Ahn ldquoExperimental investigation of avibration isolation system using negative stiffness structurerdquoInternational Journal of Mechanical Sciences vol 70 pp 99ndash1122013
[5] A Carrella M J Brennan T P Waters and V Lopes JrldquoForce and displacement transmissibility of a nonlinear isolatorwith high-static-low-dynamic-stiffnessrdquo International Journalof Mechanical Sciences vol 55 no 1 pp 22ndash29 2012
[6] Z Lu T Yang M J Brennan X Li and Z Liu ldquoOn thePerformance of a Two-Stage Vibration Isolation SystemWhichhas Geometrically Nonlinear Stiffnessrdquo Journal of VibrationAcoustics vol 136 no 6 Article ID 064501 2014
[7] Q Meng X Yang W Li E Lu and L Sheng ldquoResearchand Analysis of Quasi-Zero-Stiffness Isolator with GeometricNonlinear Dampingrdquo Shock and Vibration vol 2017 9 pages2017
[8] D L Platus ldquoNegative-stiffness-mechanism vibration isolationsystemsrdquo in Proceedings of the SPIErsquos International Symposiumon Optical Science Engineering and Instrumentation Interna-tional Society for Optics and Photonics pp 98ndash105
[9] X Huang X Liu J Sun Z Zhang and H Hua ldquoEffect of thesystem imperfections on the dynamic response of a high-static-low-dynamic stiffness vibration isolatorrdquo Nonlinear Dynamicsvol 76 no 2 pp 1157ndash1167 2014
[10] X C Huang X T Liu and H X Hua ldquoEffects of stiffnessand load imperfection on the isolation performance of a high-static-low-dynamic-stiffness non-linear isolator under basedisplacement excitationrdquo International Journal of Non-LinearMechanics vol 65 pp 32ndash43 2014
[11] Z Yan B Zhu X Li and G Wang ldquoModeling and analysis ofstatic and dynamic characteristics of nonlinear seat suspensionfor off-road vehiclesrdquo Shock and Vibration vol 2015 Article ID938205 13 pages 2015
[12] J Zhou Q Xiao D Xu H Ouyang and Y Li ldquoA novelquasi-zero-stiffness strut and its applications in six-degree-of-freedom vibration isolation platformrdquo Journal of Sound andVibration vol 394 pp 59ndash74 2017
[13] A Carrella M J Brennan T P Waters and K Shin ldquoOnthe design of a high-static-low-dynamic stiffness isolator usinglinear mechanical springs and magnetsrdquo Journal of Sound andVibration vol 315 no 3 pp 712ndash720 2008
[14] D L Xu Q P Yu J X Zhou and S R Bishop ldquoTheoretical andexperimental analyses of a nonlinear magnetic vibration iso-lator with quasi-zero-stiffness characteristicrdquo Journal of Soundand Vibration vol 332 no 14 pp 3377ndash3389 2013
[15] Y Shan W Wu and X Chen ldquoDesign of a miniaturized pneu-matic vibration isolatorwith high-static-low-dynamic stiffnessrdquoJournal of Vibration and Acoustics vol 137 no 4 Article ID045001 2015
[16] L Meng J Sun and W Wu ldquoTheoretical design and charac-teristics analysis of a quasi-zero stiffness isolator using a diskspring as negative stiffness elementrdquo Shock and Vibration vol2015 Article ID 813763 19 pages 2015
[17] R A Ibrahim ldquoRecent advances in nonlinear passive vibrationisolatorsrdquo Journal of Sound and Vibration vol 314 no 3ndash5 pp371ndash452 2008
[18] N Zhou and K Liu ldquoA tunable high-static-low-dynamic stiff-ness vibration isolatorrdquo Journal of Sound and Vibration vol 329no 9 pp 1254ndash1273 2010
[19] D Francisco Ledezma-Ramirez N S Ferguson M J Brennanand B Tang ldquoAn experimental nonlinear low dynamic stiffnessdevice for shock isolationrdquo Journal of Sound and Vibration vol347 pp 1ndash13 2015
[20] D F Ledezma-Ramirez N S Ferguson andM J Brennan ldquoAnexperimental switchable stiffness device for shock isolationrdquoJournal of Sound and Vibration vol 331 no 23 pp 4987ndash50012012
[21] J Xu and X Sun ldquoA multi-directional vibration isolator basedon Quasi-Zero-Stiffness structure and time-delayed active con-trolrdquo International Journal of Mechanical Sciences vol 100article no 3024 pp 126ndash135 2015
[22] X Liu X Feng Y Shi Y Wang and Z Shuai ldquoDevelopmentof a semi-active electromagnetic vibration absorber and itsexperimental studyrdquo Journal of Vibration and Acoustics vol 135no 5 Article ID 051015 2013
[23] A Abolfathi M J Brennan T P Waters and B Tang ldquoOnthe effects of mistuning a force-excited system containing aquasi-zero-stiffness vibration isolatorrdquo Journal of Vibration andAcoustics vol 137 no 4 Article ID 044502 2015
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom