Embed Size (px)
Citation preview

ENHANCED COMPRESSOR DISTORTION
TOLERANCE USING ASYMMETRIC INLET
GUIDE VANE STAGGER
by
Andreas Schulmeyer
B.S., University of Illinois, (1987)
SUMMITED IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE DEGREE OF
MASTER OF SCIENCE
IN AERONAUTICS AND ASTRONAUTICS
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
August 1989
c Massachusetts Institute of Technology
Signiture of Author ...Department of Aeronautics and Astrondhtics, August, 1989
Certified byProfessor Edward M. Greitzer
Thesis SupervisorDepartment of Aeronautics and Astronautics
Accepted byProfessor Harold Y. Wachman
ntC~,nt Graduate Committee
t 2 9 1989 VITHDRAWNM.I.T.
UORAM LIBRARlfiSAero
.I ~- E-~

Enhanced Compressor Distortion Tolerance'UsingAsymmetric Inlet Guide Vane Stagger
byAndreas Schulmeyer
Submitted to the Department of Aeronautics and Astronauticýson August 28, 1989 in partial fulfillment c:f therequirements for the Degree of Master of Science
in Aeronautics and Astronautics
ABSTRACT
This w6rk is experimental verification of a method ttoincrease axial compressor distortion tollerance. The methoduses a restagger of the inlet guide vanes to achieve thedesired uniform inlet velocity profile. In order to achievethis the vanes are opened in the low total pressure region,increasing mass flow and pressure rise in this section, andclosing the vanes in the high total pressure region toreduce the mass -flow and pressure rise in this section ofthe compressor.
The theoretical calculations showed that a ten degreerestagger of the guide vanes would achieve the desiredresult for a one dynamic head total pressure distortion.This setup was then tested on the MIT low-speed single stagecompressor. The test data showed the improved performance ofthe restaggered compressor. The non--uniformity in the inletvelocity is reduced by 50%, while presssure rise at stall is5.3% higher than without the restagger and the stall flowcoefficient is 2.7% higher.
Thesis Supervisor: Edward M. Greitzer
Title: Professor of Aer'onaut-i cs and Astronautics

ACKNOWLEDGEMENTS
I would like to offer my thanks to my advisor,
Professor E.M. Greitzer, for his support in solving many of
the unexpected mysteries that the experimental results
provided.
Thanks to Gwo-Tung Chen for his theoretical work which
set the basis for this experimental investigation as well as
the patient introduction he gave me to the methods of this
scheme.
I also appreciate all the help provided by Viktor
Dubrowski, Roy Andrew, Jim Nash and Jerry Guenette with the
experimental setup.
I would also like to thank all my friends at the GTL
and at Ashdown for making life at MIT so much more
enjoyable.
Most of all I would like to thank my parents, Gerhard
and Helga Schulmeyer, for all their love and encouragement
that have made it possible for me to be where I am.
This work was supported by the Air Force Office of
Scientific Research under contract AFOSR -87- 0398E.

TABLE OF CONTENTS
Abstract 2
Acknowledgements 3
List of Tables 5
List of Figures 6
List of Symbols 9
Chapter 1 Introduction 10
Chapter 2 Theoretical Model and Calculations 13
2.1) Introduction 132.2) Compressor Characteristic Calculations 132.3) Distortion Theory Summary 162.4) Restaggering Scheme Calculations 18
Chapter 3 Experimental Setup 21
3.1) Introduction 213.2) Blading Modifications 223.3) Blade Row Spacing 233.4) Distortion Screen Design and Placement 233.5) Instrumentation Layout 243.6) Experimental Procedure and Data Aquisition 25
Chapter 4 Experimental Results 27
4.1) Compressor Characteristics 274.2) Restaggering Scheme Calculations 294.3) Baseline Compressor Behaviour 304.4) Restaggered Compressor Behaviour 314.5) Limitations 33
Chapter 5 Conclusions and Recomendations for Future Work 35
5.1) Conclusions 355.2) Recomendations for Future Work 35
References 37
Appendix Actuator Disc Modeling 38
Tables 42
Figures 44

LIST OF TABLES
Tab I e
2.1 Compressor Geometry
3.1 Distortion Screen Total Pressure Loss Coefficient
42
43

LIST OF FIGURES
Figure
1.1 Typical Allocation of Required Surge Margin 44
1.2 Parallel Compressor Description of Response to 45Circumferential Distortion
1.3 Effect of Non-Axisymmetric Vane Stagger on 46Compressor Response to Total Pressure Distortion
2.1 Three Stage Compressor Response to Three 47Restaggering Schemes
2.2 Empirical Curve Relating Loss Coefficient and 48Diffusion Factor
2.3 Multiplying Factor on Loss Coefficient as a Funtion 48of Diffusion Factor
2.4 Deviation 'Adder' Applied to Carter's Rule as a 49Function of Diffusion Factor
2.5 Calculated and Experimental Data for 4 Low Speed 50Three-Stage Compressors
2.6 Compressor Speedline for Control Modelling 51
2.7 Experimental Speedline 52
2.8 Compressor Speedline with a 10 Degree Opening 53and Closing of IGVs and Stators
2.9 Inlet Total Pressure Distortion Profile 54
2.10 Compressor Response to a 1.0 Dynamic Head 55Distortion with a 5,10, 15 Degree Restagger ofthe IGVs and Stators Near Stall
2.11 Compressor Response to a 1.0 Dynamic Head 55Distortion with a 5,10,15 Degree Restagger ofthe IGVs and Stators at Design Flow
2.12 Compressor Response to a 1.0( Dynamic Head 56Distortion with a 8,12,16 Degree GraduatedRestagger of the IGVs and Stators Near Stall
2.13 Compressor Response to a 1.0 Dynamic Head 56Distortion with a 8,12,16 Degree GraduatedRestagger of the IGVs and Stators at Design Flow

2.14 Compressor Response to a 1.0 Dynamic Head 57Distortion with a Shifted Graduated Restaggerof the IGVs and Stators Near Stall
2.15 Compressor Response to a 1.0 Dynamic Head 57Distortion with a Shifted Graduated Restaggerof the IGVs and Stators at Design
2.16 Compressor Response to a 1.0 Dynamic Head 58Distortion with a 20,30,40 Degree IGV RestaggerNear Stall
2.17 Compressor Response to a 1.0 Dynamic Head 58Distortion with a 11,22,33 Degree IGV Restaggerat Design
3.1 Axial Velocity Perturbation Introduced by a 5910 Degree IGV Restagger vs. Blade Row Spacing
3.2 Circumferential Inlet Total Pressure Profile 60with Inlet Distortion
3.3 Pressure Instrumentation Layout 61
3.4 Velocity Measured by Pitot Tube vs. Velocity 62Measured by Total Pressure Kiel Probes andStatic Pressure Taps
3.5 Scannivalve 1 Pressure Transducer Calibration 63Curve
3.6 Scannivalve 2 Pressure Transducer Calibration 63Curve
3.7 Flow Coefficient from Averaged Pressure Readings 64vs Coefficient from Averaged Local Flow
4.1 Compressor Speedline for 7.5, -7.5 and 22.5 65Degree IGV Stagger
4.2 Compressor Speedline for 0.0 and 27.5 Degree 65IGV Stagger
4.3 Compressor Speedline for 7.5, 15.0 and 22.5 66Degree IGV Stagger
4.4 Inlet Static Pressure Profile at Design Flow 67
4.5 Inlet Velocity Profile Near Stall 67
4.6 Exit Static Pressure Profile at Design Flow 68
4.7 Compressor Speedline Curvefit for Restagger 69Calculation

4.8 Change in Pressure Rise due to Change in IGV 70Stagger Angle vs Flow Coefficient
4.9 Compressor Characteristic Slope vs Flow 70Coefficient
4.10 Calculated Compressor Response to a 1.0 71Dynamic Head Distortion with 5,10,15 DegreeIGV Restagger Near Stall
4.11 Calculated Compressor Response tp a 1.0 72Dynamic Head Distortion with 5,10,15 DegreeIGV Restagger at Design Flow
4.12 Calculated Compressor Response to a 1.0 72Dynamic Head Distortion with 5,10,15 DegreeSquare Wave Restagger at Design Flow
4.13 Compressor Speedline for 15 Degree IGV Stagger 73with and without Inlet Total Pressure Distortion
4.14 Inlet Velocity Profile for Baseline Compressor 74with Inlet Total Pressure Distortion Near Stall
4.15 Inlet Velocity Proflie for Baseline Compressor 74with Inlet Total Pressure Distortion at Design Flow
4.16 Velocity Non-Uniformities for Baseline Compressor '75with 1.0 Dynamic Head Inlet Total Pressure Distortion
4.17 Magnitude of First, Second and Third Fourier 75Coefficients of Velocity Non-Uniformity f'orBaseline Compressor with Inlet Distortion
4.18 Magnitude of Axial Velocity Perturbation for an 76Isolated Rotor with a 10% Inlet VelocityNon-Uniformity
4.19 Restaggered and Baseline Compressor Speedline 77with Inlet Total Pressure Distortion
4.20 Inlet Static Pressure Profile for Baseline and 78Restaggered Compressor Near Stall
4.21 Inlet Velocity Profile for Compressor with Inlet 79Total Pressure Distortion Near Stall
4.22 Inlet Velocity Profile for Compressor with Inlet 79Total Pressure Distortion at Design Flow
4.23 Velocity Non-Uniformities for Restaggered 80Compressor with 1.0 Dynamic Head Inlet TotalPressure Distortion

4.24 Magnitude of First, Second and Third Fourier 80Coefficients of Velocity Non-Uniformity forBaseline and Restaggered Compressor
4.25 Phase of First, Second and Third Fourier 81Coefficients of Velocity Non-Uniformity forBaseline and REstaggered Compressor
4.26 Exit Static Pressure Profile for Comressor with 82Inlet Total Pressure Distortionand IGV Restaggerat Design Flow

List of Symbols
C Velocity
Ci Blade chord
cp Pressure rise coefficient across blade row
P Non-dimensional pressure
R Mean radius
r Blade stagger angle
a Absolute flow angle
7 Blade stagger angle
Flow coefficient
P Density
0 Circumferential angle
P Compressor pressure rise
Subscipts
e Exit
in Inlet
t Total
x Axial
y Circumferential

Chapter 1 Introduction
Inlet distortion tolerance is an important factor
affecting the stall margin in modern axial compressors. Up
to one half of the design stall margin (Figure 1.1) may be
allocated to account for the effect of inlet distortion [13.
This margin allows for the non-uniformities in the inlet
flow due to such phenomena as crosswind, high angle of
attack induced inlet seperation or shock-boundary layer
interaction in supersonic inlets. In addition to decreases
in pressure rise and efficiency of the compressor, possible
effects of inlet distortion are rotating stall, combustion
flame out or engine overheating.
For these reasons the effect of inlet distortion on
axial compressors has received much attention in the past
years. Methods have been developed to predict performance
E2,3,43 and stability E5,63 of a compressor operating with
an inlet distortion. The standard methods to reduce engine
succeptability to distortion are to increase the tolerance
to non-uniformities by modifying the engine inlets, or to
lower the operating point to increase the stall margin.
With the capabilities of new electronic controls other
methods to increase distortion tolerance have become
available. The theoretical capability to control the stagger
setting of each individual inlet guide vane (IGV) or stator
blade [73 allows the compressor to be divided into two or
more 'parallel compressors', with an asymmetric restaggering
patern chosen to match the inlet distortion E83. By opening

the vanes in the low total pressure region the -flow
coefficient is increased and the operating point moves away
from stall. In the high total pressure region the vanes are
closed and the flow coefficient is reduced, however, because
this region is operating far from stall the reduction in
flow coefficient does not pose a problem.
The behaviour of a compressor restaggered in this
manner can be shown qualitatively in the response of a
parallel compressor to a inlet total pressure distortion.
The low total pressure zone and the high total pressure zone
operating points are determined by the magnitude of the
inlet distortion and the slope of the compressor
characteristic (Figure 1.2). This leads to a different flow
coefficient in the two regions, with the low pressure zone
operating closer to stall. A non-axisymmetric vane stagger
reduces this velocity non-uniformity by shifting the low
total pressure region speedline to the right and the high
total pressure region speedline to the left (Figure 1.3).
The result of the restaggering is a more uniform flow
coefficient around the compressor circumference and an
increase in stall margin gained by moving the low total
pressure operating point further from stall.
A further benefit of using this method is that the mass
averaged pressure rise is not reduced as much as when
closing all vanes uniformly. A second benefit in terms of
overall engine performance is that the compressor can
deliver a uniform flow to the combustor thus reducing the

I ikelyhoo cd of developing hot spots that cat damage the
turbi ne3.
Th e ob jcect of this thesis is to experimenta I ly
demonstrate this type of" scheme for impjroving inlet
distortion toleraince of arn existi-ng ccompressc-r. The test
vehicle is the single stage compressor at the MIT Gas
Turbine ...aboratory. The results of t f the exper iment are
described in this thesis.

Chapter 2 Theoretical Model and Calculations
2.1) Introduction
The theoretical calculations performed as part of the
distortion control are the application to a specific single
stage compressor of the method described by Chen et al. for
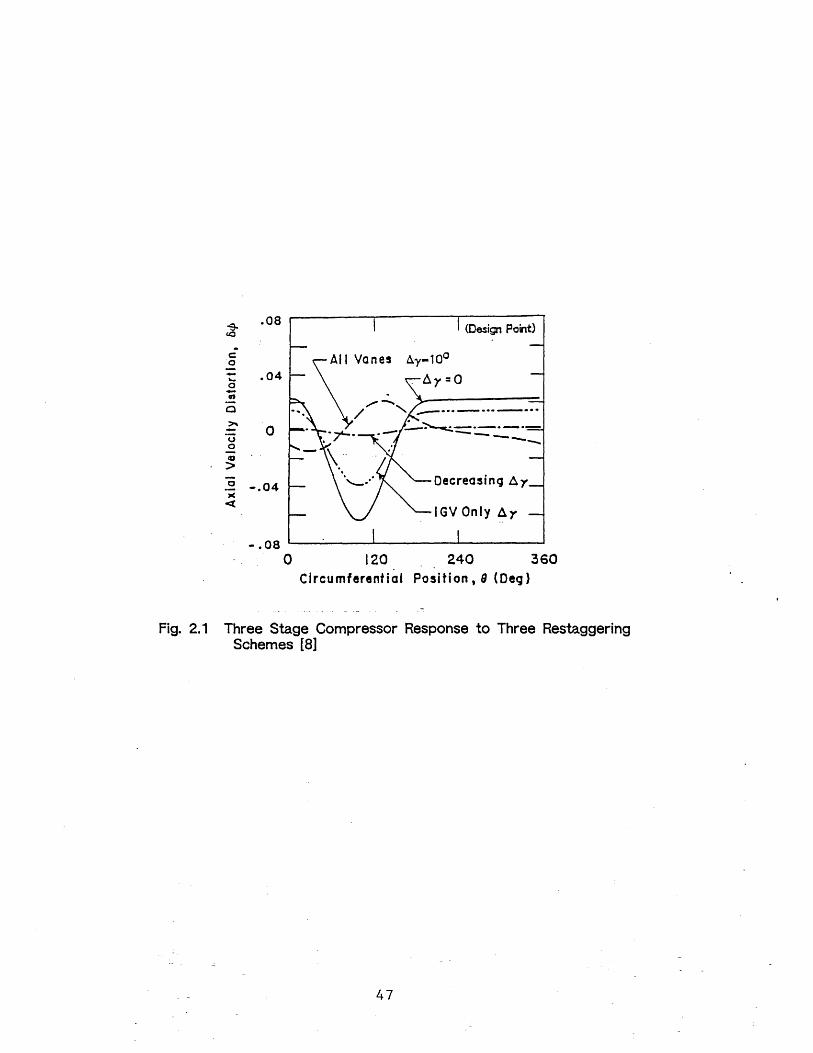
axial compressors. The work in E83 consisted of calculating
the characteristics for a three stage compressor and
implementing the control sceme on this compressor. The
procedure used to calculate the off-design performance was
shown to lead to speedlines in agreement with experimental
data. The computations also indicated that the distortion
control is capable of reducing the velocity defect due to a
distortion of greater than two dynamic heads by a factor of
two (Figure 2.1).
This chapter deals with the prediction of the
compressor characteristic, a summary of the distortion
computations and the application of the computations to the
single stage compressor.
2.2) Compressor Characteristic Calculation
The program used to calculate the off-design behaviour
of the compressor was written by Chen E86 based on a model
proposed by Raw and Weir [93. Losses are calculated -for the
blade rows by using a loss parameter based on the diffusion
factor (Figure 2.2), with a multiplication factor dependent

on blade Reynolds number (Figure 2.3) applied. Carter's rule
for deviation is modified by an "adder' which is a function
of the diffusion factor of the blade rows (Figure 2.4).
The major assumptions of the analysis are:
- high hub to tip ratio, so mean line velocity
triangles are used
- low Mach number so compressibility is neglected
- blades are represented by circular arcs
The last assumption leads to deviations in reasonable
agreement with experimental data, as the turning is
overestimated by neglecting real -fluid effect and by
neglecting thickness turning is underestimated. These two
effects are of comparable magnitude [10) for a solidity of
order one, the solidity of the rotor and stator rows in the
experimental compressor.
The required inputs to the program are the rotor and
stator camber and stagger angles and the IGV leaving angle.
The compressor characteristic and the flow angles are then
calculated for any desired range of flow coefficients.
For the three stage compressors used in previous
calculations the agreement between the calculated arnd
experimentally obtained speedlines is close enough for the
control calculations that followed (Figure 2.5).
The results for the single stage compressor, however,
showed a characteristic that continues to rise as the flow
coefficient deceases (Figure 2.6). From these calculations
it was not possible to predict the compressor stall point
(or the pressure rise at stall) with any precision. The

model does not perform satisfactorally for the single stage
compressor possibly because the correlations used to predict
losses are optimized for multi-stage compressors. The
factors are thus optimized for multi-stage compressors.
Even though the program calculated speedlines that are
not comparable to the experimental speedlines, that were
later obtained (Figure 2.7), the calculated curves were used
to determine the amount and location of restaggering
required to reduce the magnitude of the velocity distortion.
The restagger ing calculations are possible with the
calculated speedlines as the method uses the relative
changes in pressure rise due to a change in stagger and the
slope of "the characteristic as the relevant parameters. For
the actual amount o-f restaggering required the experimental
speedlines could then be used to repeat the calculations. To
find the optimum restaggering method the calculated
speedlines were then used with the point of inflection, the
point where the calculated speedline is the 'flattest', as
the calculated 'stall' point.
The program was then used to calculate various
speedlines. The final compressor geometry can be found in
table 2.1 and the calculated characteristic in figure 2.6.
The stacking of the speedlines required for this control
scheme is shown in figure 2.8 where the nominal speedline is
bracketed by the speedlines with a 10 degree opening and
closing of the IGVs and stators. From this family of curves
the parameters necessary for the restaggering calculations,
15

•a-o•• and a''/a , can be obtained.
2.3) Distortion Theory Summary
This section is a summar'y of the theory developed by
Chen fo:'r a compressor operating with a steady inlet
distortion. The pressure rise across a blade row is given by
an axisymmetric part and an asymmetric component due to the
fluid acceleration within the blade row. The fluid mechanics
for compressor response to total pressure inlet distortion
is described in [53.
With a linearized upstream and downstream flowfield the
compressor performance is given by
where
SCi
cos r4
is the parameter associated with fluid acceleration
within the blade rows. C, r, R are the chord, stagger and
mean radius, respectively, of the rotor.
For a small disturbance the downstream pressure field
satisfies
VP2 P =O (2.2)
and the boundary condition at the compressor exit plane is
aPc ac, + cac(P a• "=O a• =oy
16

results obtained
Eq. (2.2) and (2.3) are
6=- i aq a6o+ - a o--+ r ST-a
and
= 0' sec' aa6aI
(2.5)
Expanding all variables in Fourier series
+oo
6i =C a, einae-lniz
+oo
65i= z d enin#n -oc69 = n b eini
+-00
Sy = E dn iniL= -0O
and subsituting Eq. (2.6),(2.8) and (2.9) into Eq. (2.5) we
have
znan= - sec'IIn bn + dn)
89n
Comb i n i ng (2.4),(2.7),(2.8) ,(2.9) and (2.10)
S in se ) d en- i sec c a1'
-nA +- seC in • c•p- Tc-o
a6 ,PaZ 1,=0
(2.6)
(2.7)
(2.8)
(2.9)
(2.10)
bn - (2.11)
The linearized from perturbing

The stagger distribution that eliminates the velocity
distortion, i.e.
(2.12)6 =0, b =O
is given by
d, -17-- a (2.13), 02 _eC2 C1 '3.7en a , seco a+
2.4) Restaggering Scheme Calculations
The program that calculates the characteristics for the
compressor also provides the two variables a.i/ay and
YT/D~ that determine the behaviour of the compressor with an
inlet distortion and the implemented restagger. These two
derivatives are needed to t•d calculate the velocity profile
of the compressor with an inlet total pressure distortion
and various stagger profiles. The goal is to find a stagger
profile to minimize the velocity non-uniformity at the face
of the compressor. For the calculations the inlet total
pressure distortion is a sine shaped defect over 180 degrees
of the annulus with a magnitude of one dynamic head (Figure
2.9).
Based on the work done by Chen two schemes were used in
the first set of calculations. The first is a restagger of
both IGVs and stators identical amounts in phase with the
total pressure distortion. The results can be seen in the
resulting axial velocity distribution for the compressor
operating near stall (Figure 2.10) and at design flow

(Figure 2.11). For both of these the velocity defect due to
the distortion are of the same shape and magnitude, as in
both cases the slope of the characteristic and al~Y are
almost identical. The capability to correct the velocity
defect at both flow coefficients is also of the same order
resulting in almost identical behavior for both cases. The
magnitude of the velocity distortion is reduced by almost a
factor of two for both flows although there is still a
defect remaining. It is not possible to reduce the velocity
non-uniformity any further with this scheme, as a larger
restaggering leads to an overcorrection in parts of the
circumference, which can be seen in the 15 degree restagger
of the blade rows.
This led to the attempt to reduce the velocity
distortion by restaggering the stators and IGVs differing
amounts, still in phase with the pressure distortion. A
sampling of the resultant velocity profiles, of the case
where the stator restagger is 3/4th of the IGV restagger,
can be seen in *figures 2.12 and 2.13. Here again it was
possible to reduce the velocity distortion by a factor of
two, but the velocity profile still shows the same behaviour
as the previous calculations.
The next step allowed for a phase shift between the
restaggered regions and the pressure distortion. The model
was extended in this case to allow for the phase shift
between the restaggering in the two blade rows. In this case
the repsonse to a stator restagger is calculated separately

from the response to a IGV restagger. This extension of the
model assumes that the velocity perturbations introduced by
the restagger of the stators does not alter the velocity
perturbation introduced by the IGVs if both are calculated
separately and vice versa. This is possible as the
:Linearization in the model assumes that DI/0 and aayan
remain constant even with the velocity perturbations
introduced by the total pressure distortion, or in this case
by the restagger of the other blade row. The final result is
then obtained by summing the effect of the individual blade
row restaggerings. This method introduces the phase shift as
a new degree of freedom and should thus lead to an improved
velocity profile.
As -figures 2.14 and 2.15 show a reduction of the flow
non-uniformity can be achived in this manner. The magnitude
of the velocity distortion can be reduced by a factor of
four or more. The complexity of this scheme, however,
detracts from its attractiveness so that further schemes
were tested.
The most efficient method to reduce the velocity
distortion was found to require a restaggering of the IGVs
only. This method (Figures 2.16 and 2.17) is capable of
completly removing the velocity distortion, but it is
limited by the amount of restagger of the IGVs possible
without separating the airfoils.
It was decided to use only the restaggering of the IGVs
as the scheme to be implemented. The magnitude of
restaggering is then dependent on the size of the pressure
20

distortion, the change in pressure rise due to the change in
stagger, a/ay , and the maximum restaggering possible
without stalling the blades.

Chapter 3 Experimental Setup
3.1>) Introduction
The GTL single stage compressor was modified for the
experimental investigation. The major changes were the
restaggering of the blade rows, the reduction of stage
spacing, the installation of a distortion screen and added
instrumentation and modification of the data aquisition\
programs. The compressor has a hub to tip ratio of 0.74 and
the design flow rate for the baseline blade setting is 0.59.
A detailed description of the geometry is given in table
2.1.
3.2) Blading Modifications
The IGVs used previously were long chord sheet metal of
high solidity. These were not suitable for the restaggering
required by the distortion ex>periment, as the long chord led
to interference with the outer casing. They also have low
incidence tolerance. The replacement set of IGVs had a
shorter chord thus allowing for the required movement, and,
although they are also sheet metal, somewhat better
incidence tolerance as they are thicker, with a rounded
leading edge.
The new blades were 1/16th inch shorter than the
previous set leading to a clearance around the centerbody of
the compressor. As the centerbody was now supported only at
the front end by six struts three of the 46 IGVs were
22

replaced by bolts to locate the the centerbody and
eliminate vibration.
3.3) Blade Row Spacing
The compressor had been set up with maximum spacing, a
5" gap between the rotor and stator, for the previous
experiment. The effect of spacing was thus investigated
using an actuator disc analysis (see appendix for
derivation), with rotor and stator lumped into one disc and
IGVs as another. The spacing (H), non-dimensionalized by the
compressor radius (R), between the two was varied from the
existing setup down to zero. As the calculations show
(Figure 3.1) the velocity correction introduced with minimal
spacing (H/R = 0.05) is in phase with the IGV stagger
movement from -90 to +90 degrees. For a larger spacing the
velocity correction shifts in the direction of the turning
introduced by the IGVs. This, together with the change in
magnitude, will lead to an incorrect estimate in the
restaggering calculations based on zero spacing. The spacing
between the IGV row and the rotor was therefore reduced to
the minimum possible with the existing compressor
corresponding to H/R = 0.25, although this still left a
significant gap.
The program that calculates the compressor response to
the inlet distortion was not modified to account *for this
spacing between the blade rows due to time constraints on
the program.
23

3.4) Distortion Screen Design and Placement
The screen was designed to give a total pressure
distortion of one dynamic head. It consists of 7 sections
which lead to an approximation of the sine shaped defect
used in the calculations. The total pressure loss
coefficients for each section were determined by rescaling
the screen used by Bruce E113 to obtain a sinusoidal
velocity profile. The circumferrential extension and the
pressure loss coefficient of each section can be *found in
table 3.1.
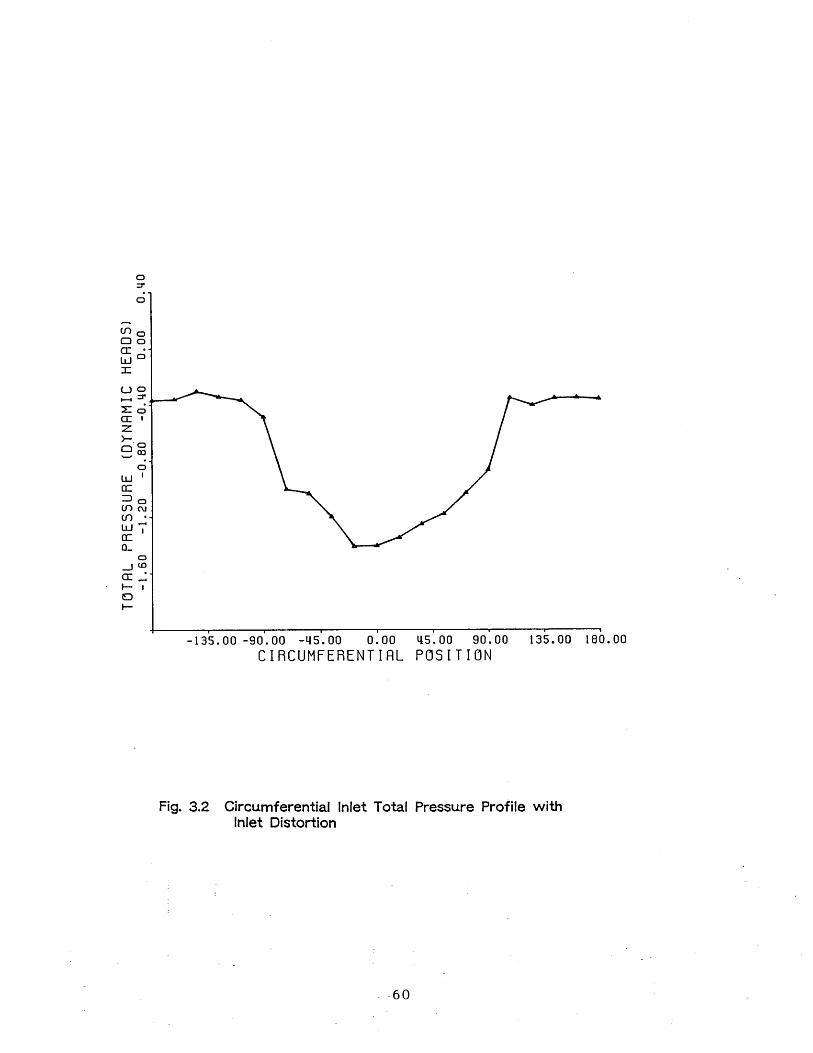
The screen was attached to the forward struts
supporting the centerbody 23 inches ahead of the IGVs, where
it could easily be removed to obtain uniform flow compressor
data. With this large spacing some mixing was ex:pected, the
total pressure profile measured at the IGV plane is shown in
figure 3.2. The overall profile approximates the desired
sinusoidal total pressure defect, except for the reading at
-90 degreesthe interface of the low and high total pressure
regions, which is lower than expected.
3.5) Instrumentation Layout
The instrumentation was set up to give a detailed
circumferential profile in front of the IGV plane and to
measure overall compressor performance. Twenty kiel probes,
for total pressure measurement, and twenty static pressure
taps were installed upstream of the IGVs. Ten more sets were
installed downstream of the stator (Figure 3.3). The close
24

spacing of the kiel probes behind the static pressure taps
led to an increase in the static pressure measured and a
correction factor was calculated by representing the kiel
probe and its wake as a source. The resulting correction
-factor of 1.08 for the axial velocity agrees with the ratio
of the axial velocity measured by a pitot tube compared to
that obtained from the kiel probes and static pressure taps
(Figure 3.4).
Four of the static pressure taps, two at the inlet
plane and two in the downstream set, were not used in the
calculations as they gave incorrect readings whose origion
could not be found.
The calibration curves for the two scannvalves used to
obtain the pressure readings are shown in figures 3.5 and
3.6.
3.6) Experimental Procedure and Data Aquisition
"The basic plan of the experiment was as follows. The
compressor characteristics for IGV settings of +15, 0, -15
relative to the design staggering were first obtained. With
this data lT/ay can be calculated. This determines the
amount of restaggering required to remove the velocity
distortion introduced by the screen. The final speedlines
would then show the difference between the uniformly and
non-ax i symmetricly staggered compressor and show the
improvement in the circumferrential velocity profile.
The individual speedlines are taken starting with the
25

throttle completely open. The throttle is slowly closed to a
new operating point and the procedure repeated until the
stall point is reached. Each of the compressor operating
points is calculated using an average of the inlet total and
exit static pressures to give the total to static pressure
rise. The axial velocity is calculated by averaging the
local velocities obtained from the total and static pressure
probes. This definition of the axial flow coefficient is
also used for the distorted flow where it represents an
average -flow coefficient for the whole compressor.
In distorted flow the overall flow coefficient for the
compressor obtained from averaging the individual velocities
gave a value up to 5% higher than a method using the average
pressure readings (Figure 3.'7). As defined here, therefore,
all axial flow coefficients are those based on the
velocities at the inlet plane.
26

Chapter 4 Experimental Results
4.1) Compressor characteristics
The first sets of data taken were the family of
speedlines needed to calculate the variables aP/o and '/o .
Several IGV stagger settings were used. The inital setup was
an IGV stagger angle of 7.5 degrees (Figure 4.1). As
expected from previous results the agreement with the
calculated speedline was only acceptable near the design
flow coefficient of • = 0.59, so new calculations of the
optimum stagger were performed using the experimentally
obtained speedlines.
Two speedlines were then taken for a change of stagger
of +/- 15 degrees from nominal (Figures 4.1). The
increased stagger of 22.5 degrees led to a decrease in
pressure rise and stall flow coefficient, as predicted by
theory. The speedline with the IGV stagger setting of -7.5
degrees showed an unacceptable drop in pressure rise near
stall, dropping below the pressure rise for the +7.5 degree
stagger. T'he reason for the lower pressure rise is the
separation of the airflow on the IGVs at a high negative
angle of attack. As the l inear model uses only a mean value
of aY/7 a change in sign of T/qY was inappropriate f'or the
range of stagger angles to be used in the control sceme.
Figure 4.2 shows a speedline for a IGV stagger of 0
degrees . Using linear interpolation of the three speedlines
with stagger angles of +7.5, 0 and -7.5 degrees stagger the
27

critical stagger for which 0a~y = 0 is at 3 degrees, which
was taken as the point where the IGVs separated.
To avoid stagger angles for which the sign of
Dii/l~ changes a speedline was taken with an IGV stagger of
27.5 degrees (Figure 4.2). This speedline along with the
speedlines "for +7.5, 15 and 22.5 degress showed the desired
stacking and they were chosen -for the experiment (Figure
4.3).
The nominal setting around which the non-axisymmetric
staggering was then designed was a stagger angle of 15
degrees which allowed for a maximum restagger of up to 10
degrees before separation occured.
The static pressure readings for undistorted flow
(Figure 4.4) showed non-uniformiteis that could not be
accounted for. A correction factor for each probe was
therefore obtained from the raw data. The corrected velocity
profile was then satisfactory near stall (Figure 4.5). The
upstream struts supporting the centerbody, the eccentricity
of the centerbody, the variation of the blabe tip clearence
and other imperfections in the compressor are accounted for
in this correction. The correction in the static pressure
readings accounts for the permanent, i.e. systematic, non-
uniformities in the compressor and the subsequent will show
only changes due to the inlet distortion and the IGV
restagger.
The same correction, to account for blade to blade
variations and other imperfections of the compressor, was
performed on the exit static pressure non-uniformities, but
28

even then it was not possible to reduce the static pressure
non-uniformity at the exit plane to less than .05 dynamic
heads (Figure 4.6).
4.2) Restaggering Scheme Calculations
The parametersaT//ay and DI/ao were determined from the
experimental speedlines. All speedlines were fit with a
third order polynomial (Figure 4.7) and the resulting curve
fits used for a calculation cr'fTl/ayandaTy/aat any operating
point of the nominal speedline. These values (Figure 4.8 and
4.9) are compared with those calculated using the computer
generated speed 1 ines. The experimental values of ~DP/ayand
aYIJ/ were used to find the restaggering required to reduce
the velocity non-uniformity created by the distortion
screen. For the 1.0 dynamic head total pressure distortion a
restagger of 10 degrees was needed (Figures 4.10 and 4.11)
to obtain a sizable reduction in the velocity distortion.
The actual restagger of the IGVs was a square wave with
a +10 degree restagger in the low pressure zone and a -10
degree restagger in the high pressure region. "The square
wave restagger was chosen as a simple sector restaggering
that would show a benefit similar to the more complicated
method of a sinusoidal restagger, where each blade would
have to be restaggered by a different amount. The results of
using a square wave restagger in the calculations can be
seen in figure 4.12. The figure shows that with the 10
degree square wave restaggering it is possible to reduce the
29
velocity non-uniformity by a factor of two.
4.3) Baseline Compressor Behaviour
The compressor was run with the distortion screen
installed and uniform IGV stagger angle to find the baseline
response. The characteristics with and without distortion
are shown in figure 4.13. The pressure rise at stall is 7.9%
lower and the stall flow coefficient decreased from 0.38 to
0.37. The drop in pressure rise is to be expected as a
result of the total pressure inlet distortion.
The velocity profiles for the distorted flow operating
conditions show a more pronounced effect (Figures 4.14 and
4.15). For all flow coefficients the shape of the profiles
are similar and follow that of the total pressure profile.
The large change in flow coefficient at the 0 degree
position can be explained by the presence of one of the
three supporting struts which replaces the IGV at this
location. This large spike appears in the distorted flow, as
the swirl introduced by the inlet distortion leads to a non-
uniform incidence angle on the IGVs around the
circumference. At this larger, non-uniform incidence angle
the strut will therefore have a stronger influence on the
local flow coefficient.
The non-uniformity in the inlet velocity is measured
using three methods. The first method is the rms value, the
second is the sum of the absolute values of the difference
between the average and local flow coefficient and the third
30
is a Fourier analysis of the velocity profile showing the
magnitude of the first three coefficients. Using these
measures of non-uniformity the experimental data shows a
trend opposite to that of the theoretical calculations
(Figure 4.16 and 4.17). The velocity distortion increased
towards lower flow coefficients for the theoretical model,
while the distortion becomes more severe -for higher flow
coefficients in the experiment.
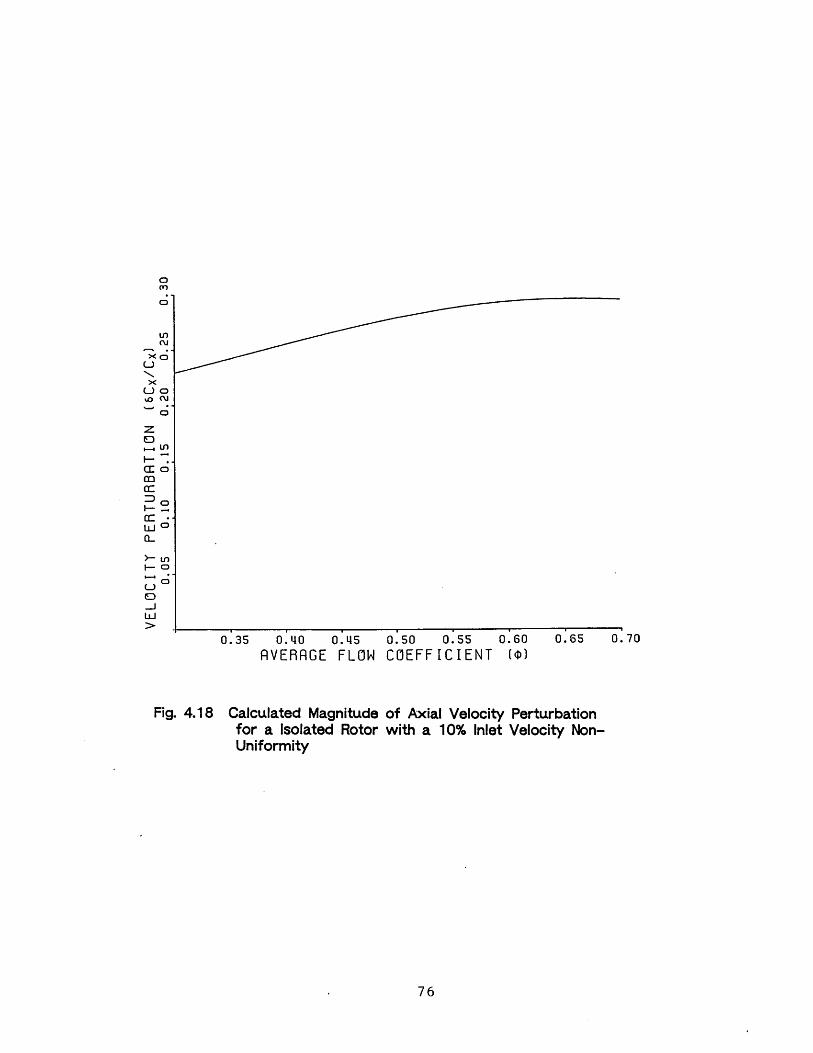
This change in behaviour is thought to be due to the
setup of the compressor. Due to the separation between the
rotor and the stationary blade rows the behaviour of the
compressor has similarities to that of an isolated blade
rotor. Using an actuator disc model of an isolated rotor the
trend observed in the experiment can be predicted. As the
calculations show (Figure 4.18) the velocity non-uniformity,
in this case the maximum amplitude of a sinusoidal velocity
distortion, will increase for higher flow coefficients. The
theory therefore confirms the trend observed in the
experiment. This change in behaviour will modify the
magnitude of the individual distortions, but it does not
effect the control scheme otherwise.
4.4) Restaggered Compressor Behaviour
With the restagger implemented the same sets of data
were then taken to determine the improvement in performance.
The average performance given by the speedline is shown in
Figure 4.19. The stall pressure rise is now 0.38 compared
31

to the baseline 0.36 and the stall flow coefficient moved
from 0.37 to 0.38. The loss in pressure rise is smaller than
in the uncorrected case. The restaggering of the IGVs has
brought the flow coefficient at stall back to the
undistorted ý = 0.38.
The changes in the pressure and velocity profiles show
this improvement of the flow more clearly. The static
pressure is decreased in the region where the vanes are
opened relative to the uniform stagger setup (Figures 4.20).
This leads to an increase of the velocity and thus a
reduction of' the distortion for all flow coefficients. The
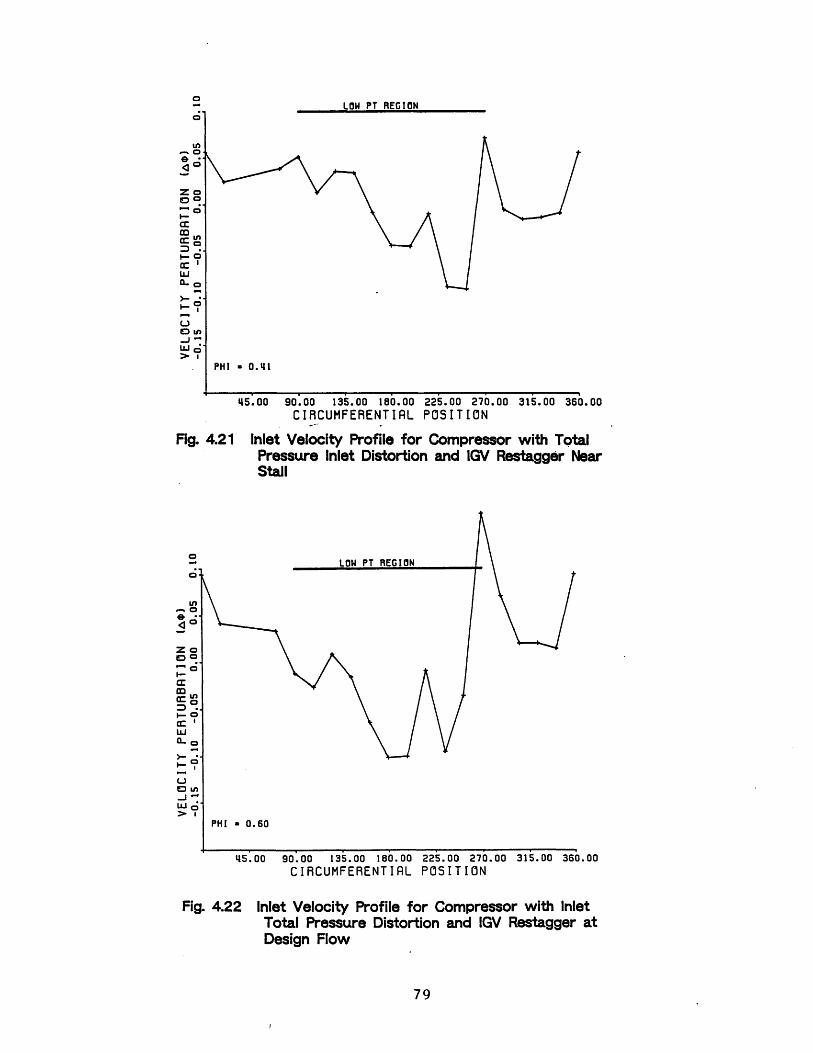
non-uniformity of the velocity profiles in the restaggered
setup (Figures 4.21 and 4.22) shows a change from the
baseline case, but a direct comparison is difficult due to
the non-uniformities in the profiles.
A more detailed examination of the restaggered profiles
shows a large increase in velocity in the region between 250
and 290 degrees, as the calculations for the square wave
restagger had predicted. This "spike' is the result of two
side effects of the restagger square wave restagger. The
restaggering provides too much correction here. The static
pressure is reduced even though this section is not in a low
total pressure region, thus leading to an increases in
velocity.
There is also an.effect due to the spacing between the
blade rows. As the actuator disc calculations had shown the
spacing would lead to a correction that would be larger than
the calculated correction for zero spacing, in the direction
32
of the swirl induced by the IGVs. The spike is more extreme
in the experiment due to the abrupt change in stagger at
this location from 5 to 25 degrees. The spike could
therefore be removed if the restagger were implemented
interactively, using a measurement of the local flow
velocity to restagger the IGVs in that region.
The increases in the flow coefficient at 135, 200 and
360 degrees in figures 4.21 and 4.22 are again a result of
the supporting struts.
The comparison of the criteria for distortion magnitude
show a clearer decrease of a factor of two in the velocity
non-uniformities for all flow coefficients (Figure 4.23 and
4.24). For the higher flow coefficients the restagger is not
as effective as for the lower flow coefficients, as it was
desig~ned *for a flow coefficient of ý = 0.45. A comparison
of the phase of the first three harmonics (Figure 4.25)
shows only small changes in the phase of the harmonics.
4.5) Limitations
These results of the response of the compressor to the
distortion and the resulting restaggering show some of the
limits of the basic scheme.
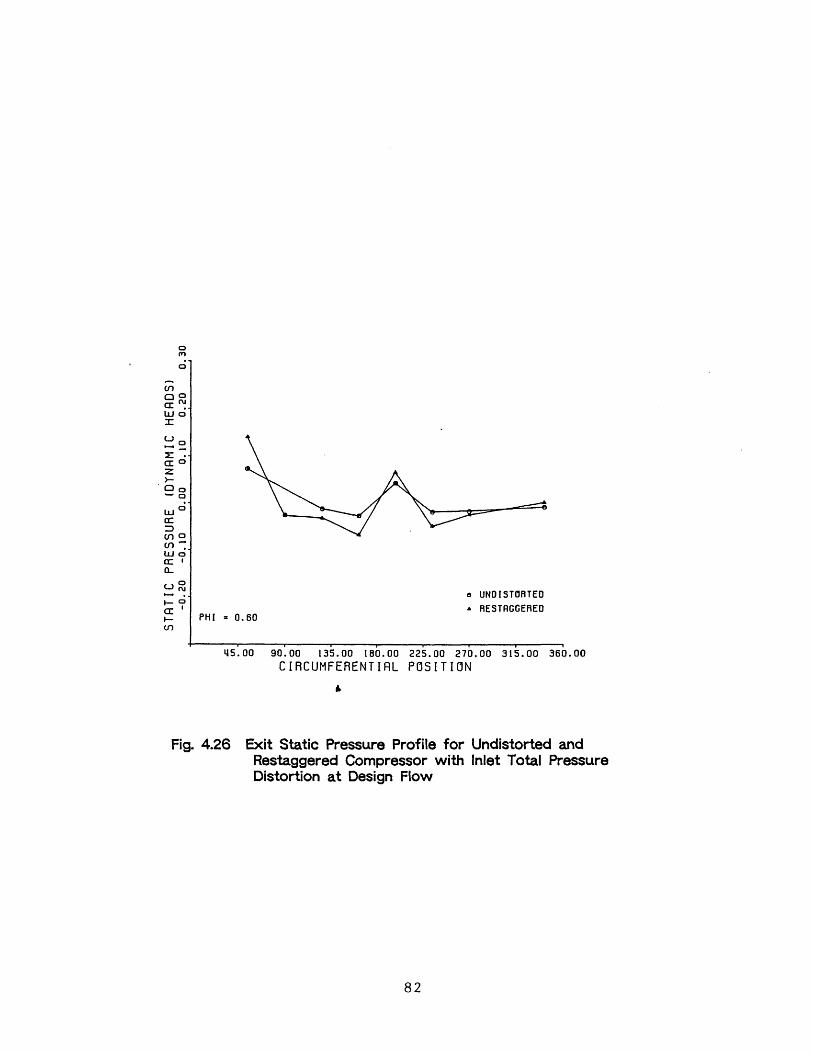
The exit static pressure profile does not agree with
the uniform pressure assumption of the model (Figure 4.26).
This non-uniformity existed with and without the distortion,
and the conclusion is that it is due to the compressor and
33

not due to the restaggering of the IGVs.
The shift of the static pressure profile in direction
of rotor rotation relative to the original total pressure
distortion is ignored in the linear model, which assumes no
spacing between the blade rows. This together with the
sudden change in stagger angle at the interface of the two
regions leads to an interaction of the two sections not
included in the parallel compressor model.
34

Chapter 5 Conclusions
and Recomendations for Future Work
5.1) Conclusions
The results of the implementation of the non-
axisymmetric stagger are encouraging even given the very
non-ideal test conditions. They show that it is possible to
reduce the velocity distortion at the compressor face by a
factor of two with an IGV restagger of 10 degrees. A setup
with closer more typical spacing between the blade rows and
aerodynamically improved IGVs, typical of current axial
compressors, should increase the ability to reduce velocity
distortions and extend the method to even larger inlet total
pressure distortions.
Non-axisymmetric restaggering also reduced the loss in
pressure rise due to the inlet total pressure distortion.
5.2)Recomendations for Future Work
The restaggering required of the IGVs is in the range
possible in current engines. The possibility of
implementing this method opens further questions on overall
engine performance that need to be investigated.
The ability of the scheme to adapt to different inlet
distortions plays a role in its usefulness. If each blade
has to be controlled independently to achieve the reduction
in velocity non-uniformity the improvements will be much
35

smaller, due to the weight and complexity of the actuators,
than if sectors of 60 to 90 degrees can be restaggered by a
single actuator. A future investigation would therefore test
a compressor with inlet total pressure distortion and a
restagger in a certain section with varying phase between
the two, to determine how accurately the restaggering has to
be positioned to obtain a desired decrease in f low non-
uniformity.
Similarly the number of sensors required to determine
the location and magnitude of the distortion will depend on
the level of accuracy needed to show an improvement in
compressor behaviour. Here the work would concentrate on the
number of probes required to locate the inlet distortion.
The implementation of this method in an engine would
then require a quick method, such as a lookup table, that
would specify the amount of restagger required for each
sector according to the extend and magnitude of the
distortion as well as the location of the current operating
point on the speedline. Future work in this area would deal
with the amount of time required between the sensing of an
inlet distortion and the repositioning of the IGVs.
Before this method can be applied to actual compressors
further work will have to be done to compare the relative
gains of implementing this method instead of improvements
gained by an additional compressor stage and the amount of
sensing required to make the restagger ing an efficient
method of improving distortion tollerance.
36

REFERENCE
1) Seymore, J. C., 'Aircraft Perormance Enhancement withActive Compressor Stabilization',MIT Thesis Sept 1988
2) Mazzaway, R. S., 'Multiple Segment Parallel CompressorModel for Circumferential Flow Distortion' , Engineeringfor Power, Vol. 99 No. 2, April 1977
3) Stenning, A. H. , 'Inlet Distortion Effects in AxialCompressors', Journal of Fluid Engineering, Vol. 102,March 1980
4) Reid, C., 'The Response of Axial Flow Compressors toIntake Flow Distortion:', ASME Paper 69-GT.-29, 1969 ASMEGas Turbine Conference
5) Hynes, T. P. and Greitzer, E. M., 'A Method of AssessingEffects of Circumferential Flow Distortion onCompressor Stability', ASME Journal of Gas Turbines andPower,
6) Hynes, T. P., Chue, R., Greitzer, E. M. and Tan, C. S.,'Calculation of Inlet Distortion Induced CompressorFlow Field Instability', AGARD Conference ProceedingsNo. 400, 'Engine Response to Distorted Inflow', March1987
7) Epstein, A. H., '"'Smart' Engine Components: A Micro inEvery Blade?', Aerospace America, Vol. 24, January 1986
8) Chen, G. T., 'Active Control of TurbomachineryInstability - Initial Calculations and Results', MITThesis August 1987
9) Raw, J. A., and Weir, G. C., "'The Prediction of Off-Design Characteristics of Axial and Axial/CentrifugalCompressors', SAE Technical Paper 800628, April 1980
10) Rannie, W.D. ,'The Axial Compressor Stage', Section Fof 'Aerodynamics of Turbines and Compressors',Princeton University Press, 1964
11) Bruce, E. P., 'Design and Evaluation of Screens toProduce Multi-Cycle 20% Amplitude SinusoidalVelocity Profiles', AIAA Paper No. 74-623, AIAA 8thAerodynamic Testing Conference, July 1974
37
Appendix Actuator Disc Modeling
As the model used in the origional calculations assumed
a compressor with closely spaced blade rows the changes due
to the large seperations in the experimental machine had to
be investigated seperately. Actuator disc theory allows a
quick and simple estimation of the trends introduced by the
spacing.
The first set of calculations are an estimate of the
change in ability to correct the flow due to the seperation
between the blade rows. The flow field is divided into three
regions, the flow upstream of the IGV plane, the flow in the
gap between IGVs and rotor, and the flow downstream of the
stator. The rotor and stator are lumped into one disc, as
all the restaggering occours in the IGV blade row.
The flow in the three regions is then governed by
V1 = -CO =L ein
V22 = -)2 = M e -in tan •1 (x/R) + in (A-)
V2 3 = -03 =N e-in tanP3 (xR) + in
respectively. The magnitude of L is determined by the
magnitude of the inlet distortion and M and N are determined
by the loading on the blade rows.
The stream functions that satisfy these equations are
'1 = A eine +ndR + B e ine - nx/R + W eine
38

'2 = C emne + nx/R + D eine - nx/R + E ein( - x/R tan a2)
Y 3 = F e ino + nx/R + G e in0 - nx/R + H ein( - n/R tan - )
The magni tude of the constants A through H are
determined by the boundary conditions at x = c c and at the
two blade rows x = 0, h.
at x =-- Co is bounded => B = 0
at x = co 'I is bounded => F = 0
At each of the blade rows three boundary conditions
have to be met. Contenuity has to be satisfied, the flow
leaving angle is specified by the blade setting and the
pressure rise is given by the compressor characteristic.
at x = 0
A + W = C + D + E
- itan.a A = C - D - i tan a2E ( -3)
P2 ) = ([2U1 + 2VlV]cp + 2 + V12] a)cR ae ae 2 ae ae ae
at x: =h
C enh/R + D e-n R + E e-inh R tan a 2 = G e-nh/ R +H e-in R tan a3 ( A-4)
in tan a2 (C en + D e- nW + E e- inR tan a2) = - G e- nR + H e- nW tan a3R R
- )= ([2U2 + 2V2 ]c+ [U+ +Vi )R ae ao 2 ae a P ae
the pressure depedency can be removed from the dynamic
equations by substituting the momentum equation
39

U a+ + (A--5)5x Rao pRaO
The velocities are then expressed in the
streamfunctions and the equations linearized by dropping all
second order terms. The resulting 6 x 6 system can then be
evaluated for any desired inlet distortion or IGV blade
distribution.
The other application is the calculation of the effect
of an isolated rotor on a velocity distortion. In this case
the flowfield is divided into an upstream and downstream
region.
V 2i =-
(A-5)
V 2 2 = -02
In this case the pararmeter was the flow coefficient of
the compressor. As a result of this the pressure rise of the
blade row had to be included as a function of the flow
coefficient. The model uses a curve-fit of the nominal
experimental speedline for this, as the calculations are
only intended to show the trend in the magnitude of the
velocity distortion. The change in pressure rise around the
circumference due to the velocity non-uniformity is acounted
for by using the slope of the characteristic at the average
flow coefficient. The flow direction in the downstream
region is now also dependent on the flow coefficient, as the
relative leaving angle is asumed to be constant.
Applying the boundary conditions at x = and at x = 0
and performing the same substitutions as before leads to a 3
£40

x 3 system that can be solved to find the effect of the
rotor.

Rotor Stator
Hub Diameter (rrmn) 444 444 444
Casing Diameter (mn) 597 597 597
Number of Blades 46 44 45
Chord (mrr) 33 38 38
Solidity at Midspan 0.9 1.0 1.0
Aspect Ratio 2.2 1.9 1.9
Camber (deg) 12 25.5 30.0
Midspan Stagger (deg) 15 28.7 45.0
Blade Clearance (rrmn) 1.6 0.8 1.5
Table 2.1Compressor Geometry
IGV

Sector Loss Coefficient(deg) Pt/.5 Rho Cx^2
-90 to -70 1.02
-70 to -30 1.34
-30 to 30 1.72
30 to 70 1.34
70 to 90 1.02
90 to -90 0.32
Table 3.1
Distortion Screen Total PressureLoss Coefficient
43

OPERATING LINE SHIFTOR
SURGE LINE SHIFT
REMAINING
AUGMENTOR SEQUENCING
INLET DISTORTION
ENGINE VARIATION
CONTROL TOLERANCE
REYNOLDS NUMBER
USABLE SURGE MARGIN
MINIMUM SURGE MARGIN
7Fig. 1.1 Typical Allocation of Required Surge Margin [1]
5.5%
5.5%
7.5%
2.5%
1.5%
1.5%

I* 1 I 1 1 IW 10Tal
essure Zone
PTSInlet Distortion
I2High ToPress. Z
I I0.4
I I0.6 0.8
Mass Flow, Cx/U
Fig. 1.2 Parallel Compressor Description of Response toCircumferrential Distortion
45
cliC
0.Ci--
aQ)
0
'1)
a-..
O
0u 0.2

I .
High TotalPress. Zon
Mass Fl
4-
C'30
ow, Cx/U
Fig. 1.3 Effect of Non-Axisymmetric Vane Stagger on CompressorResponse to Total Pressure Distortion
CuJD
a-
L-0U)U)
E0
0)
N IUT Il
Rss. Zone
OpeningVanes
ominal
.08-9-
0
" .04o
0u
.o -. 04
n9
0 120 240 360Circumferential Position, 9 (Deg)
Fig. 2.1 Three Stage Compressor Response to Three RestaggeringSchemes [8]

'06 1
Total pressure.05 - loss parameter
CjaLS Cos 022C1 Co 82 Fully stalled.04 cascade
.03
.02Slgnlficant cascade
.01 --- stall starts here
0U .1 *j *q * a .0 .1 ..3 .4 . .6 .7
DFAC = 1 -V+(S) ACuv, c 2TV -
Fig. 2.2 Empirical Curve Relating Loss Coefficient andDiffusion Factor [91
ni.0n
%.U
3.0
2.0
Multiplyingfactor on@ML
SP-38, fig 1, l I
ix I I1
IN)'" power law
a number 500,0001 1 1 1 1 1 1 1 1
efe rence royno e
II I
1 2 3 4 6 7 8 9 10 11 1 9
R*-blade chord reynolds number x 10-
Fig. 2.3 Multiplying Factor on Loss Coefficient as a Functionof Diffusion Factor [9]
43
51 - -i
LL
Cc
,51
- --
_ -I
0 .I
-- '----
.8 .9
5
I- ~- ~- '-

DFAC = 1 - V + (S)ACu
Fig. 2.4 Deviation 'Adder' Applied to Carter's Rule as aFunction of Diffusion Factor [9]

1.5
1.0
/s
.5
03
0.2 0.4 0.6 0.8 1.0 1.2
Fig. 2.5 Calculated and Experimental Data for 4 Low SpeedThree-Stage Compressors [8]

ROTOR STAGGER = 28.70ROTOR CAMBER = 25.50STATOR STAGGER = 45.00STATOR CAMBER = 30.00
IGV EXIT ANGLE = 15.0
0.35 0.40 0.15 0.50 0.55FLOW COEFFICIENT (0)
0.60 0.65 0.70
Fig. 2.6 Compressor Speedline for Control Modeling
o
o
-- ,
00
I-I -C'
fI,a- C)1-

IGV STAGGER
0 15.0
0.40 0.45 0.50 0.55 0.60FLOW COEFFICIENT - ()
0.65 0.70 0.75
Fig. 2.7 Experimental Speedline
0
,7
.- ,

ROTOR STAGGER - 32.80ROTOR CAMBER - 25.50STATOR STAGGER - 45.00STATOR CAMBER * 26.40
EXIT
CLOSED VANES
OPENED VANES
0.35 0.40 0.45 0.50 0.55FLOW COEFFICIENT (40)
0.60 0.65 0.70
CC<0
o
0-I
0in -"O~
a-00U)c
0=.-0
Fig. 2.8 Calculated Compressor Speedlines with a 10 DegreeOpening and Closing of IGVs and Stators
53

45.00 90.00 135.00 180.00 225.00 270.00 315.00 360.00
THETR
Fig. 2.9 Inlet Total Pressure Distortion Profile
LuJU)(n
cc
CEI-0I--

STATOR HRAX SWINGSTATOR HAX SWING
45.00 90.00 135.00 180.00 225.00 270.00CIRCUMFERENTIAL POSITION
315.00 360.00
Fig. 2.10 Compressor Response to a 1.0 Dynamic Head Distortionwith a 0,5,10,15 Degree Restagger of the IGVs andStators Near Stall
in 0.0m 5.0
IGV MAX SWINGICV HAX SWING
0.0 STATOR MAX SWING5.0 STATOR MAX SWING
PHI 0.70
IGV PHASE 0.0STATOR PHASE 0.0
45.00 90.00 135.00 180.00 225.00 270.00CIRCUMFERENTIAL POSITION
315.00 360.00
Fig. 2.11 Compressor Response to a 1.0 Dynamic Head Distortionwith a 0,5,10,15 Degree Restagger of the IGVs andStators at Design Flow
55
0.0 IGV MAX5.0 IGV MAX
SWINGSWING
0.05.0
in
0
0eo
CC0Z ;co
>- 0;I-o
0r,•Oo
0.0r
1-J=_o,i-o
o =,
-JI ocr 0
X•-(I
PHI 0.50
IGV PHASESTATOR PHASE
T0
0
In
0
z00
C;inoco05
IU,
o
x-4U0T0.
-·I

(90.0 IGV HAXM 8.0 IGV HAX
SHINGSWING
0.0 STATOR HRAX SWING6.0 STATOR HRAX SWING
a
oC;
C;tna
z9Qo05--
oC;
CCv-u0.
o
-J.oLLJW
a:•oX•IO,
-4(I IGV PHASE 0.0STATOR PHASE 0.0
45.00 90.00 135.00 180.00 225.00 270.00CIRCUMFERENTIAL POSITION
315.00 360.00
Fig. 2.12 Compressor Response to a 1.0 Dynamic Head Distotrionwith a 0,8,12,16 Degree Graduated Restagger of theIGVs and Stators Near Stall
SI0.0 IGV HAX SWINGm 8.0 IGV HAX SWING
0.0 STATOR HAX SWING6.0 STATOR HAX SWING
PHI 0.70
IGV PHASE 0.0STATOR PHASE 0.0
45.00 90.00 135.00 180.00 225.00 270.00CIRCUMFERENTIAL POSITION
315.00 360.00
Fig. 2.13 Compressor Response to a 1.0 Dynamic Head Distotrionwith a 0,8,12,16 Degree Graduated Restagger of the.IGVs and Stators at Design Flow
in
PHI 0.50

0.0 IGV MAX SWING5.0 IGV HAX SWING
0.0 STATOR MAX SWING3.0 STATOR HAX SWING
0
o
<3U,0edWzQo
I-o• Yo
C3CC0.
-JL )
0_ I
0:0XQ:=
45.00 90.00 135.00 180.00 225.00 270.00CIRCUMFERENTIAL POSITION
Fig. 2.14 Compressor Response to a 1.0 Dynamicwith a Shifted Graduated Restagger ofStators Near Stall
i--ei--
0
I-
>-
-JU
-.J
a:
6-
0.0 IGV MAX SWING 0.0 STATOR HAX SWING5.0 IGV MAX SWING 3.0 STATOR HAX SWING
PHI 0.70
IGV PHASE -15.0STATOR PHASE -30.0
45.00 90.00 135.00 180.00 225.00 270.00CIRCUMFERENTIAL POSITION
Fig. 2.15 Compressor Response to a 1.0 Dynamicwith a Shifted Graduated Restagger OfStators at Design Flow
315.00 360.00
Head Distotrionthe IGVs and
!)
-15.0-30.0
PHI 0.50
IGVY PHASESTATOR PHASE
315.00 360. 00
Head Distotrionthe IGVs and
7

0.0 IGV HAX SWING20.0 IGV HAX SWING
0.0 STATOR HRAX SWING0.0 STATOR HRAX SWING
PHI 0.50
IGV PHASE 0.0STATOR PHASE 0.0
'5.00 90.00 135.00 180.00CIRCUMFERENTIAL
225.00 270.00 315.00 360.00POSITION
Fig. 2.16 Compressor Response to a 1.0 Dynamic Head Distortionwith a 0,20,30,40 Degree IGV Restagger Near Stall
0.0 IGV MAHRX SWINGm 11.0 IGV MAX SWING
0.0 STATOR HAX SWING0.0 STATOR MAHRX SWING
PHI 0.70
IGV PHASE 0.0STATOR PHASE 0.0
CIRCUMFERENTIRL POSITION
Fig. 2.17 Compressor Response to a 1.0 Dynamic Head Distortionwith a 0,11,22,33 Degree IGV Restagger at Design Flow
zc
to0.I
ucc
I-
._i
xa:Xcr
50.00
·-·_, __

= 0.050 H/R
= 0.250 H/R
= 0.500 H/R
O0
THETR
Fig. 3.1 Axial Velocity Perturbation Introduced by a 10 Degree IGVRestagger v&. Blade Row Spacing
-135.00 -90.00 -45.00 0.00 115.00 90.00 135.00 180.00
CIRCUMFERENTIRL POSITION
Fig. 3.2 Circumferential Inlet Total Pressure Profile withInlet Distortion
60
O(c
U
ZIz
D~
O)
uJCrC
aJ
cc
It¢•

a 8 8 8 8 A 8 8 A A 8
0 STATIC PRESSURE TAPA TOTAL PRESSURE KIEL PROBE
DISTORTION SCREEN
8.00 16.00 24.00 32.00 40.00 48.00 56.00 64.00CIRCUMFERENTIAL POSITION
Fig. 3.3 Pressure Instrumentation Layout
o
o
-r,--0 0
z
o-O
d(
0
02

0.40 0.5 0.50 0.55 0.60FLOW COEFFICIENT (0]
0.65 0.70
Velocity Measured by Pitot Tube vs. Velocity Measuredby Total Pressure Kiel Probes and Static Pressure Taps
62
Fig. 3.4
0.75
-

RESIDUAL 0.0003
CORRELATION 1.2231
-30.00 -20.00 -10.00PRESSURE
0.00 10.00 20.00 30.00 40.00(IN H20)
Fig. 3.5 Scannivalve 1 Pressure Transducer Calibration Curve
RESIDUAL
CORRELATIO
-30.00 -20.00 -10.00 0.00 10.00PRESSURE (IN H20)
20.00 30.00 40.00
Fig. 3.6 Scannivalve 2 Pressure Transducer Calibration Curve
63
L o
I
5808

tnCa
U-LLOo
0J cC)- D
U)-V
CC,
LU C3CI 0
i-n
z=rIL o,-,OULL. c3LL- =U-
Dt (t-o
IL
A
0
0.35 0.40 0.45 0.50 0.55 0.60 0.65 0.70FLOW COEFFICIENT (AVERRGE PRESSURE)
Fig. 3.7 Flow Coefficient from Average Pressure Reading vsCoefficient from Averaged Local Flow
64
r W I •I IV

ITV STAGGFR
7.5
22.5
-7.5
0.40 0.45 0.50 0.55 0.60FLOW COEFFICIENT (0)
Fig. 4.1 Compressor Speedlines forDegree IGV Stagger
0.65 0.70 0.75
7.5, -7.5 and 22.5
IMV STAGGER
0.0
27.5
0.40 0.q5 0.50 0.55 0.60 0.65 0.70 0.75FLOW COEFFICIENT (0)
Fig. 4.2 Compressor Speedlines for 0.0 andIGV Stagger
27.5 Degree
65
C
ýC)u-ac;
I-o
LuLL C
L i ILLJ
aLLI
rr-"Lu CLuinU) ,
(I-Lu
a-
zLU
u
L)L..
U-
MLu
c)
Lu
Cr)
cn
LuccCr)a:a-

IGV STRGGER
D 7.5
A 22.5
+ 15.0
0.40 0.45 0.50 0.55 0.60 0.65
FLOW COEFFICIENT (4)0.70 0.75
Fig. 4.3 Compressor Speedline for 7.5, 15.0 andDegree IGV Stagger
22.5
C
U~)U)CU
°-
k--O
I.Ln
_Oc;z
LLiO.o,uuPi
C-)LU0
~0

U,
CO
cc'a-
(30
CCU,
45.00 90.00 135.00 180.00 225.00 270.00CIRCUMFERENTIAL POSITION
315.00 360.00
Fig. 4.4 Inlet Static Pressure Profile at Design Flow
PHI = 0.40
45s.oo00 90.00 135.00 180.00 225.00 270.00CIRCUMFERENTIAL POSITION
Fig. 4.5 Inlet Velocity Profile Near Stall
67
315.00 360.00
00
PHI = 0.57
0
U,
<10zC3
Zo0o
-. a
cc-oL
0-0
U0 '
>-
...........

o
(Z.ooLU 0
Cr(o
aeo
cc0z~0
LUIJo
cc'i-q:a.
.o,U,i-vl
PHI - 0.57
45.00 90.00 135.00 180.00 225.00 270.00 315.00 360.00CIRCUMFERENTIAL POSITION
Fig. 4.6 Exit Static Pressure Profile at Design Flow
68

7.5
A 22.5
27.5
75
FLOW COEFFICIENT (0)
Fig. 4.7 Compressor Speedline Curvefit for Control VariableCalculation
l--
*

CALCULATED DEXPERIMENTAL &
Fig. 4.8 Change inAngle vs
FLOW COEFFICIENT
Pressure Rise due toFlow Coefficient
70()Change n 1G
Change In IGV Stagger
CALCULATED oEXPERIMENTAL &
70FLOW COEFFICIENT (0)
Fig. 4.9 Compressor Characteristic Slope vs Flow Coefficient
oC3
C0

MAX SWING 0.0 STATOR HRAX SWINGMAX SWING 0.0 STATOR HAX sqING
41.00 90.00 135.00 180.00 225.00 270.00CIRCUMFERENTIAL POSITION
CalculatedDistortionStall
315.00 360.00
Compressor Response to a 1.0 Dynamic Headwith 0,5,10,15 Degree IGV Restagger Near
0 0.00 5.0a 10.0+ 15.0
IGV HAXIGV MAXI[GV HAXIGV MAX
SWINGSWINGSWINGSWING
0.0 STATOR MHAX SWING0.0 STATOR MAX SWING0.0 STATOR MAX SWING0.0 STATOR HRAX SWING
0.58
IGV PHASE 0.0STATOR PHASE 0.0
s5.00 90.00 135.00 180.00oCIRCUMFERENTIAL
225.00 270.00 315.00 360.00POSITION
Fig. 4.11 Calculated Compressor Response to a 1.0 Dynamic HeadDistortion with 0,5,10,15 Degree IGV Restagger at HighFlow Coefficient
(! 0.0 IGYm 5.0 IGV
PHI 0.116
IGV PHASESTATOR PHASE
Fig. 4.10
o
eC<1
oe'o
(1
(..
X MC ,r- ,oc-J
0v
[GV PHRSE
0.0
STRTOR
PHRSE
0.0
0.58

I3 0.0 IGV I- 5.0 IGV
B
zo!-
0I.-
C3,
UI--
0-C.LU
-Ju
cz:
HAX SWING 0.0 STATOR nRX SWINGHRX SWING 0.0 STRTOR MAX SWING
'15.00 90.00 135.00 180.00 225.00 270.00 315.00 360.00CIRCUMFERENTIAL POSITION
Fig. 4.12 Calculated Compressor Response to a 1.0 Dynamic HeadDistortion with 0,5,10,15 Degree Square Wave IGVRestagger at Design Flow
~r

o DISTORTED
m UNDISTORTED
0.40 0.45 0.50 0.55 0.60 0.65FLOW COEFFICIENT ($)
Fig. 4.13 Compressor Speedlines for 15 Degree IGV Stagger withand without Inlet Total Pressure Distortion
a
0C)llC)(
- nU') (\2
c)
O* 0I--
U0ý
LL. on
LLJL_)
CE•.O
cn.o,
r-
(I-
a-
0.70 0.75_ ·

LOW PT REGION
3.00
CIRCUMFERENTIAL POSITION
Fig. 4.14 Inlet Velocity Profile for Baseline Compressor withInlet Total Pressure Distortion Near Stall
Iflu PT RFfI¶M
PHI - 0.42
-135.00 -90.00 -45.00 0.00 45.00 90.00
CIRCUMFERENTIAL POSITION135.00 180.00
Fig. 4.15 Inlet Velocity Profile for Baseline Compressor withInlet Total Pressure Distortion at Design Flow
__
10W PTRFGIC

BASELINE SUM
0o
>-0tn
ca0C3
zo
LL_Lc
0
Iz CCC az•ZOcFl.crc
0.35 0.0 0.45 0.50 0.55 0. 60 0.65 0. 70FLOW COEFFICIENT (0)
Fig. 4.16 Velocity Non-Uniformities for Baseline Compressorwith 1.0 Dynamic Head Inlet Total Pressure Distortion
BASELINE COMPRESSORoFIRST HARMONICSSECOND HARMONIC+THIRD HARMONIC
0.40 0.145 0.50 0.55 0.60 0.65FLOW COEFFICIENT (0)
0.70 0.75
Fig. 4.17 Magnitude of First, Second and Third FourierCoefficients of Velocity Non-Uniformity for BaselineCompressor with Inlet Total Pressure Distortion
BASELINE RMS
zLU Ln
LLlt
LU(-3 COc
aL_U_
:3ooSa
LL
C)0LUO
:3,cE,.-••
._Q_
L_
..........
0.35 0.40 0.45
RVERAGE FLOW0.50 0.55 0.60COEFFICIENT (W)
0.65 0.70
Fig. 4.18 Calculated Magnitudefor a Isolated RotorUniformity
of Axial Velocity Perturbationwith a 10% Inlet Velocity Non-
oCýCr)o"
LnCu
xo_.ox C
"-' cu"
ZU~UN-- ,0
z
n- •CccC.Uj C3

o RESTAGGERED
A BASELINE
0.40 0.115 0.50 0.55 0.60 0.65 0.70 0.75FLOW COEFFICIENT (0)
Fig. 4.19 Restaggered and Baseline Compressor Speedlines withInlet Total Pressure Distortion
0
0
U--
(,c
*0z
tr
LLJ-0LL.u.LL- 0Oi
L.UU
LU
(n
LUcc:ara-

(
CIRCUMFERENTIAL POSITION
Fig. 4.20 Inlet Static Pressure Profile for Baseline andRestaggered Compressor Near Stall
ZIccLLJCoI:IW--," o
U,
a-0o
YOD
U Q
ICUcr.
U-U)
1.00
N OL PT REG !0N
PHI a 0.41
45.00 90.00 135.00 180.00 225.00 270.00 315.00 360.00CIRCUMFERENTIAL POSITION
Fig. 4.21 Inlet Velocity Profile for Compressor with TotalPressure Inlet Distortion and IGV Restagger NearStall
eQ
z
cr0I-
LI-
a-U
I-
-JLii
).00CIRCUMFERENTIAL POSITION
Fig. 4.22 Inlet Velocity Profile for Compressor with InletTotal Pressure Distortion and IGV Restagger atDesign Flow
79

0.35 0.40 0.45 0.50 0.:55 0.60 0.65FLOW COEFFICIENT (0)
>-.
O
Z"-C
Zo
Zo o
U_)z..
mZmOOcr
3o Cocr
Fig. 4.23 Velocity Non-Uniformities for Baseline and RestaggeredCompressor with 1.0 Dynamic Head Inlet Total PressureDistortion
BASELINE COMPRESSORoFIRST HARMONIC-SECOND HARMONIC+THIRD HARMONIC
RESTAGGERED COMPRESSORxFIRST HARMONICoSECOND HARMONIC*THIRD HARMONIC
0.40 0.45 0.50 0.55 0.60FLOW COEFFICIENT (0)
0.65 0.70 0.75
Fig. 4.24 Magnitude of First, Second and Third FourierCoefficients of Velocity Non-Uniformity for Baselineand Restaggered Compressor with Inlet Total PressureDistortion
80
BASELINE SUM
RESTAGGERED SUM
BASELINE RMSRESTRGGERED RMS
0.70
(to0
08-
zLu ,CO
UU0Jc
M~0LLLu
0
Lu
C;,
_jc-
zCrLUC.-,
LuO0Do
0 •
z o-r-a-
._JQ..
.
~p"-~a-t~-~ ~

BASELINE COMPRESSOReFIRST HARMONIC&SECONO HARMONIC+THIRD HARMONIC
RESTAGGERED COMPRESSORxFIRST HARMONIC*SECOND HARMONIC*THIRD HRARMONIC
0.40 0.oL5 0.50 0.55 0.60 0.65 0.70 0.75FLOW COEFFICIENT (0)
Fig. 4.25 Phase of First, Second and Third Fourier Coefficientof Velocity. Non-Uniformity for Baseline and RestaggeredCompressor with Inlet Total Pressure Distortion
o
Io
z.LUJ
0
WOCUC-1
P-0U-Wo(J
LU.,,co0o
LLI0Uj00L. Q
00
U 0(n.
a-I
0 UNDISTORTED
RESTAGGEREDPHI = 0.60
45.00 90.00 135.00 180.00 225.00 270.00 315.00 360.00CIRCUMFERENTIAL POSITION
Fig. 4.26 Exit Static Pressure Profile for Undistorted andRestaggered Compressor with Inlet Total PressureDistortion at Design Flow
82
0
a
Wo'rU
•oCr
cr*.z0
0LUccocn
(n:o aCCa-
U,
C13cc





























