Embed Size (px)
Citation preview

3
C
mmiatiitccsvatl
.©
GEOPHYSICS, VOL. 75, NO. 3 �MAY-JUNE 2010�; P. S121–S130, 11 FIGS.10.1190/1.3396316
D VSP migration by image point transform
alin Cosma1, Lucian Balu1, and Nicoleta Enescu1
dettafntageisiug
ABSTRACT
The common characteristic of the seismic methods involvingdownhole measurements is the difficulty of designing surveysable to image the subsurface space evenly. Migration schemesfor these layouts are sensitive to reconstruction artifacts. The de-fining property of the image point �IP� transform is its ability toaccumulate amplitudes of curved reflection events appearing intime-distance profiles into approximately discoidal �or sphericalin three dimensions� vicinities in the IP domain. Due to the re-flected wavefields collapsing into such vicinities in the IP do-main, the emphasizing of the reflectors consists of enhancing re-gions with higher amounts of accumulated amplitude. True-dipfiltering can also easily be performed, even for reflectors appear-ing in the time-distance profiles as curved events due to their dip,source offset or variable velocity field. Reflecting interfaces are
grtbac
I
itspcpps
receivea@vibr
S121
Downloaded 04 Oct 2010 to 130.238.140.103. Redistribution subject to
efined as sets of linked piecewise planar-reflector elements rath-r than as collections of point diffractors. True reflectors fittinghis description are enhanced by the IP transform while diffrac-ion patterns, events produced by other wave types, multiples,nd noise of any kind, tend to be suppressed. The inverse trans-orm leads to filtered versions of time-distance profiles. An alter-ative to performing the inverse transform back to the originalime-distance representation is computing 2D/3D migrated im-ges directly from the transformed IP space.Although the 3D mi-ration by IP transform is applicable to any seismic survey geom-try, we focused on procedures for enhancing prestack migratedmages obtained by sparse multioffset, multiazimuth verticaleismic profiling �VSP� surveys as typically performed for min-ng site characterization and mineral exploration. The real datased were collected within an extensive mining seismic investi-ation program performed in Canada.
INTRODUCTION
Seismic surveys involving surface and downhole stations come inany forms: vertical seismic profiling �VSP�, walk-away VSP,oving-source profiling �MSP, i.e., a sparse array of fixed receivers
n a borehole and a dense array of moving sources on the surface�,nd reverse VSP �RVSP�, to name only a few. The common charac-eristic of these methods is the difficulty of designing surveys able tomage the subsurface space evenly. The main reason is the boreholetself, which represents a preferred “vertical” axis and all imaging at-empts tend to display a cylindrical symmetry around this axis. Verti-al is used here by convention, e.g., as in VSP, although boreholesan have any orientation. Regardless of the source and receiver den-ities, this geometry is prone to the creation of smiling artifacts witharious Kirchhoff migration schemes. Moreover, with VSP the im-ge extent of horizontal reflectors shrinks with depth near and belowhe borehole while vertical features are imaged transversely relative-y far but only at depths not exceeding that of the borehole. This
Manuscript received by the Editor 31 December 2008; revised manuscript1Vibrometric Canada Ltd., Toronto, Ontario, Canada. E-mail: calin.cosm
com.2010 Society of Exploration Geophysicists.All rights reserved.
ives the VSP 3D imaging attempts a bowl shape, in which steepereflectors appear near the brim and the more gently dipping reflec-ors appear near the bottom. Real reflector elements tangent to theowl and migration smiles are hard to tell apart �Cosma, 2003�. Thepproach described here uses the IP transform as a means to over-ome these shortcomings.
P transform
Let Dn,n�1,N be an array of detectors placed along a straight linen a medium with constant velocity V. Let S be a source point with aransverse offset with respect to the detector line �Figure 1�. Theource S and the detectors Dn,n�1,N define a plane P. Let I be aoint in the plane P and R a plane perpendicular to the segment SI,rossing it in the middle. By definition, the point I is the image ofoint S with respect to the plane R and will be referred to as the imageoint �IP�. Image means therefore “reflected virtual image” of theource, as in optics. The terminology used here is consistent with
d 2 September 2009; published online 26 May 2010.ometric.com, [email protected], nicoleta.enescu@vibrometric
SEG license or copyright; see Terms of Use at http://segdl.org/

tHff�
sfa
imitwim
wtvc
w
at
udflrtbttItfcd
wnd
wtaa
fbcwss
fivofv
Fw�tswtitmi
S122 Cosma et al.
hat used for the introduction of the IP transform by Cosma andeikkinen �1996�. The distances dn��� 2� �� I�� n�2,n�1,N
rom point I to detectors Dn are equal to the lengths of the trajectoriesrom the source S to detectors Dn by reflection on the plane R and tn
dn /V are the times along these trajectories in a medium with con-tant velocity V. Hence, tn��� 2� �� I�� n�2 /V defines the timeunction of a reflected field from source S to the reflection plane R toshot gather g�z,t� measured by detectors Dn,n�1,N.The IP transform is related to the Radon transform but the integral
s taken on curved paths instead of straight lines. The definition andain properties of the 2D IP transform are reiterated here to aid clar-
ty. The IP transformed profile � ��,� � is obtained by stacking in theime-depth profile g�z,t� along paths corresponding to all ��,� � pairsithin a selected domain �min�� ��max,� min�� �� max, thus cover-
ng all possible positions and orientations that a reflecting planeight have
� �� ,��� �Zmin
Zmax
dzg�z,t� tr�� ,�;z��, �1�
here tr�� ,�;z� is the arrival time corresponding to the planar reflec-or specified by � and � to the detector at depth z �Figure 1�. The in-erse transform is constructed by integrating along each path that re-eived the contribution of g�z,t� in the direct transform
Sourced
h
Receiver
Z
Image source(ξ ζ ϕ), ,
2 2ρ = +ξ ζ
ζ
ξ
P
igure 1. Cylindrical coordinate system �� ,� ,�� used in IP space, inhich the � -axis lies along the borehole �assumed to be straight�, the-axis is perpendicular to the � -axis and contains the source S, and
he angle � is the azimuth relative to the � -axis in a medium of con-tant velocity or with 1D variation with depth. All image sourcesith the same �� ,� � coordinates produce identical time-depth func-
ions because the distances from the image source to all receivers arendependent of the relative azimuth �. This property allows most ofhe computations to be performed in two dimensions. The third di-
ension is regained at a later stage, when the polarization of the datas examined.
Downloaded 04 Oct 2010 to 130.238.140.103. Redistribution subject to
g�z,t��1
2� ·V2 · tH
�
�t�� 1
� 2
d� � �� ;� ��r�z,t;� ��, �2�
here V is a chosen constant velocity and
�r��V2t2�z2�2z� . �3�
The Hilbert transform H and the derivation with respect to timere used to restore the original signal shape, similarly with the � -pransform.
If the image point I moves on a circle around the axis � in a medi-m of constant velocity, the function tn remains unchanged, hence, tn
oes not define uniquely a reflector but a class of reflectors. These re-ectors intersect the axis � in the same point, the inclination of theeflector plane R depending on the azimuth � of the image point I. Ifhe array of detectors does not lie on the straight line axis � , e.g., theorehole is bent, the solution is no longer degenerated with respect tohe azimuth �. The same stands true if the propagation from source So detectors Dn does not take place in a medium of constant velocity.n both cases, it is still possible to establish a correspondence be-ween a reflector plane R and a time function tn using an image point Ior a given azimuth �. The time functions tn, however, become moreomplex than the hyperbolic paths of the constant-velocity case. Theirect IP transform from equation 1 can now be expressed as
� �� ,�,��� �Zmin
Zmax
dzg�z,t� tr�� ,�,�;z��, �4�
here tr�� ,�,�;z� is the is the arrival time corresponding to the pla-ar reflector R, specified by �, � , and azimuth � to the detector atepth z in a variable velocity medium and �r in equation 3 becomes
�r��Vr2t2�z2�2z� , �5�
ith Vr being the variable velocity along the trajectory from source So the reflection plane R to detectors Dn, which also depends on thezimuth �. The length of this curved ray trajectory through the vari-ble velocity medium is expressed by Vrt.
One can perform the inverse variable velocity curved-path trans-orm but it is of a more practical interest to perform a pseudo-inversey applying equation 2, where V will be a constant velocity valuehosen as representative for the data set. After performing the for-ard and the pseudo-inverse transform, reflection events corre-
ponding to reflectors of all orientations move to their would-be po-itions in a constant velocity medium.
Coherent events with apparent velocities in the time-distance pro-les falling in the range �Vr are reconstructed by the forward and in-erse transform, whether they cross the whole profile or only a partf it. These are not necessarily true reflectors because portions of dif-raction events and some converted waves, e.g., wider-angle PS con-ersions, can fulfill this condition. Such events are, however, sup-
SEG license or copyright; see Terms of Use at http://segdl.org/

ppowCId
ebtfiwp
dflTsftpdid
ocfFwctAaieSritapanttrpcwdbic
alai
opaeapIeuilfwpi
reflect
3D VSP migration by image point transform S123
ressed by stacking multiple profiles because the corresponding am-litudes do not focus in the IP space in areas consistent with imagesf the same reflector. A version of the IP transform that also operatesith diffractions can be used for imaging local discontinuities �e.g.,osma et al., 2006�. The general principle on which the diffraction
P transform operates is that a diffraction point can be thought of as aelayed image source.
Similarly to the forward and inverse � -p transform, coherentvents with apparent velocities falling outside the �Vr range tend toe suppressed along with incoherent noise of any kind. The inverseransform therefore leads to filtered versions of time-distance pro-les. If the velocity model used does not locally encompass thehole range of true velocities, reflection events can be partly sup-ressed or imaged spuriously by the transform.
Figure 2 shows two model shot gathers computed at differentepths in a crosshole geometry containing one re-ector and coherent and incoherent gray noise.he velocity field used in the direct transform isimilar to the one used to build the synthetic dataor the deeper profile but is set 10% to 20% higherhan the model for the shallow profile.As a result,art of the reflection event in the shallow profileisappeared by the application of the forward andnverse transform. One can also note the overallecrease in the incoherent noise.
Figure 3 presents an example of an applicationf the classic IP filtering for one far-offset three-omponent VSP profile, shown as raw and trans-ormed data.An axial raw-data profile is shown inigure 3a, in which the direct P-wave velocityas estimated at VP�5850 m /s. A slope break
an be noticed at 440–460 m, associated withhree upgoing events marked A, B, and C. Event
is a PP reflection from an inclined interface thatlso generates an S-wave converted field travel-ng with a velocity Vs�3350 m /s, marked asvent C. Event B has no apparent associated-wave conversion and was interpreted as a PPeflection from a subhorizontal interface. The ax-al profile is shown in Figure 3b after true-ampli-ude recovery, removal of direct wavefields, anddaptive gain control �AGC�. This sequence ofreconditioning operations did not make second-ry wavefields emerge convincingly from theoncoherent noise background. The reason is thathe contrast of acoustic impedance of the frac-ures and fracture zones versus the backgroundock is low for this data example. Figure 3c dis-lays the envelope of the IP transformed axial-omponent profile and Figure 3d shows the two-ay transformed axial-component profile. Theisappearance of the S-conversion, event A, cane noted. Several upgoing events appear, follow-ng the same trend as event B, along with otheroherent patterns with different orientations.
The transformation to the IP domain allows thepplication of a wide variety of filters, e.g., dip se-ection, multiple- and tube-wave suppression,nd coherency enhancement. The general filter-ng effect of the IP transform results from the use
43.0051.0059.0067.0075.0083.0091.0099.00
0.00 20Depth
(m)Time (m
a)
43.0051.0059.0067.0075.0083.0091.0099.00
0.00 20Depth
(m)Time (m
251.00259.00267.00275.00283.00291.00299.00307.00
0.00 20Depth
(m)Time (m
c)
b)
251.00259.00267.00275.00283.00291.00299.00307.00
0.00 20Depth
(m)Time (m
d)
Figure 2. Syncontains a subthe modeled rformed profilecounted for inlocity 10% toper part of the
Downloaded 04 Oct 2010 to 130.238.140.103. Redistribution subject to
f the actual propagation velocity in the computation of integralaths. The filtering effect can be increased by following a nonlinearpproach instead of the linear integral in the inverse transform. Forxample, the amplitudes along each stacking path can be orderednd the sum can be performed only for a chosen subset. A less com-utationally demanding method is to compute the envelopes in theP transformed space and modulate the sum by the maximum of thenvelope along each integration path. The optimum weight to besed with the filter depends on certain characteristics of the data ands to be decided on a case-by-case basis. Large weights of the enve-ope maxima would result in well-defined but fewer events, theainter reflections being filteredout along with the noise. Smalleights would let through more events but the coherency would im-rove only slightly. A typical result of such a procedure is illustratedn Figure 3e. A fairly safe procedure for preventing overprocessing
0
50
100
150
200
250
300
350
400
450
1500 2500 3500 4500
Reconstructed and model velocity
Dep
th(m
)
e)
00 60.00 80.00100.00
00 60.00 80.00100.00
00 60.00 80.00100.00
00 60.00 80.00100.00
hot gathers computed for vertical crosshole geometry. The modelntal reflector and gray noise with the same spectral characteristic asn event. �a, c� The original and �b, d� the forward and reverse trans-
hown. �c, d� The velocity for the deeper gather has been correctly ac-nsform. �a, b� The shallower gather has been reconstructed with a ve-gher �red curve� than �e� the correct one �blue curve�, causing the up-or to disappear.
.00 40.s)
.00 40.s)
.00 40.s)
.00 40.s)
thetic shorizoeflectios are sthe tra20% hi
SEG license or copyright; see Terms of Use at http://segdl.org/

cippdaWa
ntt
oftfg
dc�Tt
(
a
c
e
FpecNpw
S124 Cosma et al.
onsists of randomly rearranging parts of the IP transformed profilento a dummy one so that causal coherency is destroyed. The dummyrofile is then run through the same processing scheme as the realrofile. Coherent events seeming to emerge in the dummy profile in-icate that the power of the filter must be turned down. Nonlinear an-lytical amplitude modulating functions., e.g., power, sigmoid, andeibull functions, have also been used by the authors with various
mounts of success.The results of the direct and inverse IP transform, IP filtering with
onlinear enhancement, and IP dip-filtering �Figure 3f and g� illus-rate the advantages of the technique. Conversely, the classic Radonransform converts hyperbolic reflection events in time-distance to
B A
S-WAVE
P WAVE
40140240340440540640740840940(m)
0 50 100 150 200 250 300 350(ms)40
140240340440540640740840940(m)
0 50 100 150 2
–1000
–400
200
800
1400
2000
2600
3200
0 0.400.801.201.602.002.402.80ρ(x 1000m)
ζm)
C B40140240340440540640740840940(m)
0 50 100 150 2
E B
B
E
40140240340440540640740840940(m)
0 50 100 150 200 250 300 350(ms)B40
140240340440540640740840940(m)
0 50 100 150 2
40140240340440540640740840940(m)
0 50 100 150 200 250 300 350(ms)
) b)
) d)
) f)
g)
C
igure 3. Application of the classic IP filtering for one far-offset axrofile. �a� Axial-component raw data. �b� Same axial profile after trury, removal of direct wavefields, andAGC. �c� The envelope of the Iomponent profile shown at �b�. �d� Two-way transformed axial-coonlinear inverse of the IP transform of the same profile. �f� Dip-firofile at point �e� where all events with � 0 in the IP representere muted. �g� Dip-filtered version of the profile at point �e� whe� /� 0.71 in the IP representation from point �c� were muted.
Downloaded 04 Oct 2010 to 130.238.140.103. Redistribution subject to
ther hyperbolas in the transformed domain with no clear advantageor processing. The focusing capability of the hyperbolic Radonransform has also been noted, e.g., by Bickel �2000�. The IP trans-orm presented here became a model-driven approach and thereforeoes beyond integration along analytical paths.
The application of the 2D IP transform with the multioffset VSPata has already demonstrated its validity with numerous reservoirharacterization, ore delineation, and deep rock engineering projectsCosma and Enescu, 2004; Enescu et al., 2004; Cosma et al., 2006�.he IP transform expanded to three dimensions described here re-
ains the capability to convert velocity-dependent curved reflectionevents in the original space �shot or receiver gath-ers� to points in the IP domain in two and/or threedimensions.
As reflected wavefields collapse into points inthe IP domain, the signal-to-noise ratio improvesby the mere forward and inverse application ofthe IP transform, which reveals more identifiablereflection events in the transformed data. Eventswith smaller apparent velocities than the velocityfield used in the transform are filtered out. For ex-ample, as shown in Figure 3, the S-conversionpresent in the panel obtained by standard process-ing has been removed by the direct and inverse IPtransform. Also, noncoherent noise is reduced inthis way. Filters that can be easily implemented inthe IP domain are muting, wave separation, anddip filtering. Multiples, refractions, and tubewaves are difficult to be separated in shot or re-ceiver gathers. These are easily suppressed at willin the IP domain as they accumulate in a differentregion than the valid reflectors.
METHOD
A parallelepipedic parameterization is created,as shown in Figure 4, with dx, dy, and dz the voxelsize and I, J, and K the number of voxels alongeach axis. The center of the voxel Vijk isV�Vx,Vy,Vz� with Vx� �i�1� ·dx�Ox, Vy � � j�1� ·dy �Oy, Vz� �k�1� ·dz�Oz, and O�Ox,Oy,Oz� a chosen local origin. With VSP, thez-axis is set along the borehole �or along its best-fitting piecewise linear approximation if the bore-hole is deviated�. For convenience, the local ori-gin is chosen at or above the borehole top.
Whenever possible, the velocity distribution iscomputed throughout the parametric volume de-fined above by constrained tomographic inver-sion �Cosma, 1983, 1995� of traveltimes from allseismic data available at a given site: VSP, sur-face 2D/3D, crosshole, and acoustic logging.Acoustic logging and crosshole data provide a de-tailed, albeit transversely limited, vertical veloci-ty estimate in regions with existing boreholes.Multioffset multiazimuth VSP data expand thevelocity estimate horizontally, forming down-pointing cones with axes along the boreholes inwhich VSP measurements are performed. Sur-face 3D data complete the estimate by increasing
300 350(ms)
300 350(ms)
300 350(ms)
ponent VSPlitude recov-
formed axial-nt profile. �e�ersion of theom point �c�vents with 0
00 250
00 250
00 250
ial-come-amp
P transmponeltered vation frre all e
SEG license or copyright; see Terms of Use at http://segdl.org/

tpgbimpttvs
lc
imt
wptrsioH
ivTp
svpf
cnw
wReswosjtdcpt
nFe
flLot
o
wstsdwttsb
�
�
F
3D VSP migration by image point transform S125
he density of the coverage close to the surface. The constraints ap-lied to the tomographic inversion refer mainly to two aspects: miti-ation of the dependency with scale of the various data used, e.g.,orehole logging and surface 3D, and derivation of the velocity fieldn regions of the volume weakly illuminated by seismic measure-
ents. In cases in which higher horizontal velocity variability ap-ears closer to the surface, e.g., due to overburden and weathering,he lateral coverage at depth can be extended by mere horizontal ex-rapolation. In more complex cases, the lateral extrapolation of theelocity field away from the boreholes is done by means of an as-umed model.
Ray tracing of reflected wavepaths is vital for conserving the reso-ution throughout processing but it becomes laborious with the in-reasing complexity of the 3D velocity field.
The solution adopted here for the ray-tracing task consists of trac-ng rays from each source and each receiver to the centers of all para-
etric voxels. The traveltime from a source S to a voxel V and from ito receiver R is computed as
t�S,R,V��� ��SV�d�SV�� ��VR�d�VR, �6�
here ����1 /c��� is the slowness and �SV, �VR are points on theaths LSV and LVR from the source S to the voxel V and from voxel Vo receiver R, respectively. This is a rather economic way of tracingays because not only is the number of rays optimized but also thecheme can effectively use regularities and symmetries of the veloc-ty field to further reduce the computational effort. Other economic,r “parsimonious” ray-tracing schemes have been proposed, e.g., byua and McMechan �2003�.The next step of the processing scheme is the 3D vector migration
n a manner similar to Wang �2004� except that the migration is doneoxel by voxel instead of building constant traveltime ellipsoids.his is by no means a new idea but here it serves more than the mereurpose of increasing computational efficiency.
Migrating VSP data using a cylindrical system of coordinates pre-ents clear advantages due to the natural axis of the borehole. Theariation of the method presented here, however, uses a parallelepi-ed parameterization to allow the joint interpretation with the sur-ace 3D survey performed at the same site.
Let a be the particle motion vector at time t�S,R,V� in the three-omponent record at receiver R, from source S. Here a can conve-iently be replaced by the polarization vector A, computed in a timeindow centered on t�S,R,V�.The migrated amplitude at point V is
G�S,R,V��W�V��A�t� t�S,R,V�� ·R�R,V��, �7�
here R is the versor of the ray-traced direction of arrival at detectorand W�V� is a weighting function. The function W accounts for the
ffects of source directivity �known source-radiation pattern�,ource coupling �corrections derived from the analysis of the directavefield�, depth variable Q-factor �also determined from analysisf the direct wavefield�, and amplitude corrections dependent on theurvey geometry �correction for the geometric spread along the tra-ectory from source S to receiver R�. The dependence of the ampli-ude on the angle of arrival at the receiver is expressed through theot product from equation 7, the amplitude being modulated by theosine of the angle between A and R. Takahashi �1995� uses a higherower of the cosine to enhance the more likely direction of arrival ofhe incoming wavefront. A similar approach is included here in the
Downloaded 04 Oct 2010 to 130.238.140.103. Redistribution subject to
onlinear enhancement in IPspace, as explained above and shown inigure 3. Amplitude variations with the reflection angle are not yetxplicitly included in the W function.
Let it be supposed that a reflection occurs at point V on a planar re-ector element P. It is relevant to note that the two arms of the pathSV and LVR completely define the reflector orientation, the bisectorf the angle between the incident and the reflected paths at V beinghe normal N�Nx,Ny,Nz� to the planar element P.
The equation of the plane P can therefore be written as
Nx�x�Vx��Ny�y�Vy��Nz�z�Vz��0 �8�
r as
Nx�x�� /2��Ny�y�� /2��Nz�z�� /2��0, �9�
here IP�� ,� ,� � is the IP of the origin O through the plane P, aseen in Figure 4. Likewise, ISm is the image of the source Sm throughhe plane P. The original IP transform domain was built on the �ISmet, which has the particularity that all points are on a circle perpen-icular to and centered on the z-axis. The IP transform was initiallyritten in two dimensions only by a source-dependent representa-
ion. The IP domain built on the �IP�� ,� ,� � set depends neither onhe source nor on the receiver positions, which makes it a valid repre-entation for multiple offset and multiple borehole surveys and aridge between 3D surface and borehole-imaging approaches.
A further change of variable is performed by setting �x
� ·� /�� 2�� 2 and �y �� ·� /�� 2�� 2 with � ��� 2�� 2�� 2.It follows that the migrated amplitude at point V is
G�S,R,V��G�V,P�N,V���G�V,P�� ,� ,� ��
�G�V,P��x,�y,� �� . �10�
Let us now compute the total amplitude �, accumulated at point IP� ,� ,� � by taking the integral over all points V� P,
���x,�y,� ���G�V,P��x,�y,� ��dv . �11�
x
y
z
Sm
Borehole
Reflectionplane, P
Rn
N
V(i,j,k)
Ism
IP(ξ ψ ζ), ,
O(Ox,Oy,Oz)
ρ
igure 4. Geometry used for the 3D VSP migration by IP transform.
SEG license or copyright; see Terms of Use at http://segdl.org/

tp
pi
w
trdata1
mmrttwtsTot
t�6fetcslisl
stsfispplr
Fo�cc
Ftw
S126 Cosma et al.
This is the direct 3D IP transform, similar to the one given in equa-ion 1. Thus, dv is the area of the intersection of voxel V with thelane P.The total amplitude accumulated at point V�Vx,Vy,Vz� can be com-
uted by taking the integral over all planes intersecting voxel V. Thats, the inverse of the 3D IP transform can be written as
G��V��H�
�p���P�N,V��dp, �12�
here dp is a planar element intersecting voxel V.An alternative to performing the inverse transform to the original
ime-distance representation by equation 2 and migrating the filteredesult by a Kirchhoff scheme is computing 2D/3D migrated imagesirectly from the transformed IP space by equation 12. As explainedbove and shown in Figure 4, the reflection plane P is completely de-ermined by the corresponding IP �� ,� ,� �. The IP migrationmounts then to mapping the value of � from equation 4 or equation1 to the corresponding point V�Vx,Vy,Vz�.
MODEL EXAMPLE
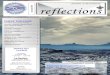
Figure 5 displays the geometry of the multioffset �31 shotpoints�,ultiazimuth VSP survey used to illustrate the performance of theethod presented here. On this geometry, a synthetic subhorizontal
eflector has been calculated for all shotpoints and is portrayed byhree 3D imaging techniques: �a� prestack Kirchhoff vector migra-ion, �b� prestack vector migration with stacking in the IP domainithout filtering, and �c� prestack vector migration with stacking in
he IP domain with coherency enhancement in the IP domain. Theame relevant slice of each imaging volume is presented in Figure 6.he signal characteristics, bandwidth of 10–200 Hz, receiver ge-metry, three-components, and geophones at 5-m intervals, were seto mimic the acquisition of the real data also presented here.
A first observation is the relative similarity, albeit not identity, ofhe Kirchhoff vector migration with stacking in the spatial domainFigure 6a� and migration with stacking in the IP domain �Figureb�. This similarity indicates that the 3D formulation of the IP trans-orm presented here is indeed robust. To be noted, there is a differ-nce, as slightly more pronounced rectilinearity and smoothness ofhe event depicting the modeled plane appears in Figure 6b whenompared to Figure 6a. On the other hand, the limited-coveragemiling artifacts are quite similar. The situation changes dramatical-y when coherency enhancement is applied in the IP domain. Due tots defining property of accumulating energy reflected from planeegments into points, enhancing coherency in the IP space is equiva-ent to emphasizing planarity in the real world.
igure 5. Layout of the borehole and shotpoints used for the multi-ffset VSPsurvey �black� and of the shotpoints used for the 3D patchgray�. Vertical seismic profiling data were collected in a slightly in-lined borehole approximately 650 m deep, from 31 shotpoints. Re-eivers were placed at 5-m intervals between 120 and 640 m.
Downloaded 04 Oct 2010 to 130.238.140.103. Redistribution subject to
A partial analogy can be made with moveout corrections wheretacking can destroy the amplitude buildup if patterns representinghe same reflectors in different gathers are not well aligned. Pullinguch patterns on top of each other is generally achieved by manualne-tuning of the velocity field. With 3D IP migration, energy corre-ponding to a given reflector in different shot gathers accumulates inoints close to each other, albeit not necessarily exactly in the sameoint, e.g., due to minute inaccuracies of the velocity field.Accumu-ations of amplitude belonging to the same IP vicinity, hence likelyepresenting the same reflector, are detected and shifted in phase in
a)
b)
c)
igure 6. Model VSP data: �a� Full-aperture Kirchhoff vector migra-ion �equation 7�, �b� IPmigration �equation 12�, and �c� IPmigrationith enhancement in the image space.
SEG license or copyright; see Terms of Use at http://segdl.org/

ttp
idfdhatattfiov
dttsAftppsia8gwrattiwdhmac
VprTd
aaoctpv
tfhsimcrTa1k
alc
Fts
Fv
3D VSP migration by image point transform S127
he transformed data from adjacent sources, improving the ampli-ude build-up before stacking. Migration artifacts are reduced by thisrocedure.
One must note that the reflected wavefield in the 3D IP migrations built by summing elemental fields produced by reflector elementsefined by their positions and orientations, as opposed to point dif-ractors obeying the Huygens principle. The two approaches pro-uce similar results for small reflector areas. Conversely, the en-ancement by IPmigration becomes relevant for reflectors that devi-te transversely less than half a wavelength from a locally best-fit-ing plane segment, at least three to four wavelengths wide, as thedded orientation information starts playing an increasingly impor-ant role. Incoherent noise and coherent patterns due to other waveypes and multiples are suppressed because the associated wave-elds do not simultaneously fulfill all the constraints: position andrientation of the reflection element, arrival time �determined by theelocity field�, and polarization direction.
REAL DATA EXAMPLE
The application of the 3D IP migration is also illustrated on a realata set acquired during a three-component multioffset �31 loca-ions�, multiazimuth VSP survey at the Millennium uranium site inhe Athabasca Basin, a Paleo- to Mesoproterozoic quartz arenite ba-in located in the northern part of the provinces of Saskatchewan andlberta in central Canada. Seismic data has been measured from sur-
ace and boreholes in a geologically complex area by a high-resolu-ion 3D survey and a VSP survey in a slightly inclined borehole ap-roximately 650 m deep. The layout of the VSP survey and the 3Datch used as an example here is depicted in Figure 5. Figure 7 pre-ents the 3D velocity model reconstructed by bent-rays tomographicnversion of arrival times measured on the VSP data set and threecoustic borehole logs from nearby �50-m radius� boreholes. Figure
displays a representative VSP three-component raw-data shotather. A technique routinely used by seismic processors to copeith the multitude of reflector orientations has been building nar-
ow-aperture “beam” migrations in various directions. The narrowperture deals with smiles very effectively indeed but there is a ques-ion as to where the beam should be pointed. Once the orientation ofhe main reflector sets is determined, inferred, guessed, or painstak-ngly identified by multiple trial and error, this technique works veryell. Figure 9 illustrates such a case, when VSP data is migratedownward to image one of the main targets present at the site, a sub-orizontal reflector at approximately 520 m. However, the otherain objective of the VSP survey, imaging of subvertical reflectors
round the investigated borehole, could not be achieved as easily be-ause their orientation was unknown prior to the interpretation of the
348737464004426345224780
m/s
igure 7. P-wave velocity field reconstruction using static correc-ions from the first arrivals measured on all VSP profiles. Velocity iscaled in the 3500–4500-m /s range �blue and red, respectively�.
Downloaded 04 Oct 2010 to 130.238.140.103. Redistribution subject to
SP data.Although it can be achieved by joint evaluation of all VSProcessed profiles, interpretation is significantly more thorough andeliable if the whole investigation volume can be imaged at once.his is what the 3D IP migration technique presented here has beenesigned to do.
Several reflections with diverse orientations both subhorizontalnd steep are present in the data. Slices of the IP domain data volumere shown in Figure 10. Figure 10a displays the IP domain data with-ut any filtering applied. In Figure 10b, high amplitudes have beenollected to local maxima, preserving the relative amplitudes be-ween the three components. The result of the inverse transform ap-lied to Figure 11a is shown in Figure 11c and the result of the in-erse IP transform applied to Figure 11b is shown in Figure 11d.
Figure 11 reiterates the comparison made in Figure 6, this time forhe case of real VSP data evaluated with respect to images obtainedrom the 3D cube, as shown in Figure 11a. The full-aperture Kirch-off vector migration �Figure 11b� presents a detailed image that isomewhat difficult to interpret. The narrow-aperture version shownn Figure 11c resolves subhorizontal reflectors fairly well. The 3D IPigration �Figure 11d� does not need to be limited in aperture be-
ause of the more effective filtering performed in IP space, aimed atecognizing and enhancing local vicinities with higher amplitudes.he subhorizontal features are more or less similar to the ones im-ged by the limited-aperture Kirchhoff vector migration �Figure1c� but there are also steep events, some of which correspond tonown faults.
With conventional imaging methods such as VSP-CDP mappingnd scalar and vector Kirchhoff migration, equal traveltime schemesead to elliptic-type smearing of the reflectors if insufficient stackingoverage is provided. However, insufficient coverage is endemic
Z
R
T
igure 8. Typical raw data VSP profiles: axial Z, radial R, and trans-ersal T components recorded by the farthest-away northern offset.
SEG license or copyright; see Terms of Use at http://segdl.org/

wsgomhf
sfiogpmrr
amromc
a
c
Fipf
–
–
–
–
F�pswbo
S128 Cosma et al.
Downloaded 04 Oct 2010 to 130.238.140.103. Redistribution subject to
ith borehole seismic methods. Stacking migrated data in the IPpace enhances planarity, which arguably provides a better tool foreometric approximation of natural reflectors than ellipticity. More-ver, piecewise approximation by segments of the plane generatesore easily distinguishable shapes in a bowl-shape reflector pool in-
erent for the VSP geometric coverage as such shapes do not inter-ere with elliptic migration artifacts.
The basic and most important characteristic of IP transform can beaid to be the concentration and enhancement of the reflection wave-eld by the IP domain. This property enables a very powerful batteryf filters. The first filter that becomes apparent through all examplesiven is the suppression of incoherent noise and of coherent patternsroduced by other wave modes than the one for which the velocityodel has explicitly been built. Because of this, the signal-to-noise
atio improves and the mere two-way application of the IP transformeveals more easily identifiable features than the original data.
DISCUSSION
Coherency enhancement is a powerful tool that is fairly easy topply with the 3D IP transform. The images enhanced in the IP do-ain for the synthetic and the real-life example given here are well
esolved. However, clarity comes at a cost, namely, the suppressionf lesser features, mostly artifacts, but also possible indications ofinute structure details. There is a gray zone between reasonable
ertainty and confident denial. The solution adopted here is inherited
850 1250 1650 Easting (m)
52905970Northing (m)
850 1250 1650 Easting (m)
52905970Northing (m)
)
)
igration from one shotpoint and �c� from three shotpoints computedcube with the same narrow-aperture IP migration from three shot-
ges at �a� and �b� mark pierce points of that structure as determined
850 1250 1650 Easting (m)
52905970Northing (m)
850 1250 1650 Easting (m)
52905970Northing (m)
) b
) d
igure 9. �a� Crossline slice from the 3D cube with �b� narrow-aperture IP mndependently for each shotpoint; �d� inline and crossline slices from the 3Doints as �c�. The red triangles on the main subhorizontal reflector from imarom the geologic logs.
–
–
–
–
ζ(m)
ρ X (km)ζ
(m) ρ X (km)
igure 10. Typical IP space slices computed from the VSP data seta� before enhancement and �b� after enhancement by nonlinear am-litude focusing by using a Weibull function. Vertical slices arehown on the left, horizontal slices to the right. All plots are shownith the same amplitude scale. The maxima �red dots� are fewer andecome better focused after enhancement, resulting in the reductionf noise and better-defined reflectors.
SEG license or copyright; see Terms of Use at http://segdl.org/

fawtfn
lstrjtps
Inttdblpw
csrotoa2t
dcp2di
tfb�v
Fvs
3D VSP migration by image point transform S129
rom the original 2D IP transform formalization and consists of cre-ting a dummy data set on an identical setup with the measured one,ith the same frequency and noise characteristics but with no inten-
ional coherency. As accidental coherency and noise-induced arti-acts do occur, the processing scheme should always be tuned so thato meaning would appear in the processed dummy data set.
With the IP transform, reflecting interfaces are defined as sets ofinked piecewise planar reflector elements, the mirror image of theource with respect to each element forming an IP. With a virtual op-ical image source, which is the IP, the amplitude builds up at a giveneceiver if adjacent receivers also receive high amplitudes from ad-acent regions of the same reflecting plane. The IP transform canherefore be used as a migration technique stacking elements of alane rather than elements of ellipsoids as with the Kirchhoffcheme.
One of the main features of the 3D IP transform is, as with the 2DP transform, its robustness to noise. Cultural and environmentaloise and electric and processing artifacts, e.g., parameterizationruncation noise, can display a certain degree of coherency and areherefore difficult to suppress. They are however reduced in the IPomain because they do not run along valid integral paths �as haseen exemplified in Figure 3�. Obviously, random noise is also un-ikely to follow valid integral paths although as with any randomrocesses surprises are possible and caution should be exercisedith interpretation.Generally, it is difficult to separate the seismic events produced by
850 1250 1650 Easting (m)
52905970Northing (m)
850 1250 1650 Easting (m)
52905970Northing (m)
a)
c)
igure 11. �a� Inline and crossline of the migrated cube resulted fromector migration, �c� 3D cube slices with narrow aperture �only dipslices with VSP 3D IP vector migration with enhancement in the imag
Downloaded 04 Oct 2010 to 130.238.140.103. Redistribution subject to
risscrossing reflectors with different dip angles. These are easilyeparated in the IP domain and therefore can be reconstructed sepa-ately by the inverse transform. This is a convenient and reliable wayf performing dip filtering, as the dip in question is the true one, nothe apparent straight-line limit drawn through a mass of curved pathsf which hyperbolas are the simplest and fairly idealized ones. Im-ge-point dip filtering is routinely applied �Cosma and Enescu,002; Cosma, 2003; Cosma and Enescu, 2004� and was briefly illus-rated here in Figure 3.
CONCLUSION
The application of the 2D IP transform with the multioffset VSPata has already demonstrated its validity with numerous reservoirharacterization, ore delineation, and deep-rock engineeringrojects �Cosma and Enescu, 2004; Enescu et al., 2004; Cosma et al.,006; Lee, 2008�. The expanded 3D IP transform described here isesigned to retain the capability to convert curved reflection eventsn the original space to points in the 3D IP domain.
The defining property of the 3D IP transform of converting reflec-ion and/or diffraction patterns produced only by physically possibleeatures on a user-defined velocity model has considerable potentialecause the method intrinsically predicts oriented elemental shapese.g., planar elements� that are reconstructed by the forward and in-erse transformation.
850 1250 1650 Easting (m)
52905970Northing (m)
850 1250 1650 Easting (m)
52905970Northing (m)
b)
d)
face 3D survey, �b� 3D cube slices with VSP full-aperture Kirchhoff10° are allowed� VSP Kirchhoff vector migration, and �d� 3D cube
e.
the surof 0° toe spac
SEG license or copyright; see Terms of Use at http://segdl.org/

mptWOpep
B
C
—
—
C
—
C
C
E
H
L
T
W
S130 Cosma et al.
ACKNOWLEDGMENTS
This work is part of ongoing seismic investigations geared forine development and was funded by Vibrometric and Cameco Cor-
oration. Vibrometric was responsible for planning the investiga-ions and for the novel ideas exposed here and their implementation.
e gratefully acknowledge the support of Garnet Wood and Clare’Dowd of Cameco Corporation for several fruitful discussions andatience during the course of our collaboration. We also acknowl-dge the support of Areva and JCU as joint venture partners in theroject from which we presented the real data example.
REFERENCES
ickel, S. H., 2000, Focusing aspects of the hyperbolic Radon transform:Geophysics, 65, no. 2, 652–655.
osma, C., 1983, Determination of rockmass quality by the crosshole seis-mic method: International Symposium Soil and Rock Investigations by InSitu Testing, Bulletin of the International Association of Engineering Ge-ology, 26–27, 219–225.—–, 1995, Characterization of subsurface structures by remote sensing:Proceedings of the International Congress on Rock Mechanics, Interna-tional Society for Rock Mechanics, 3, 1013–1021.
Downloaded 04 Oct 2010 to 130.238.140.103. Redistribution subject to
—–, 2003, Multi-azimuth VSP for rock characterization of deep nuclearwaste disposal sites in Finland: in D. Eaton, B. Milkereit, and M. Salis-bury, eds., Hardrock seismic exploration: SEG Geophysical DevelopmentSeries 10, 207–226.
osma, C., and N. Enescu, 2002, Multi-azimuth VSP methods for fracturedrock characterization: North American Rock Mechanics Symposium, 5thWorkshop, International Society for Rock Mechanics, Expanded Ab-stracts, 54–60.—–, 2004, Two decades of evolution of hardrock seismic imaging methodsapplied to nuclear waste disposal in Finland: 66th International Confer-ence and Exhibition, EAGE, ExpandedAbstracts.
osma, C., N. Enescu, B. Powell, and G. Wood, 2006, Structural mapping foruranium exploration by borehole seismic: Near Surface 2006 — Seismics,EAGE, ExpandedAbstracts C042.
osma, C., and P. Heikkinen, 1996, Seismic investigations for the final dis-posal of spent nuclear fuel in Finland: Journal of Applied Geophysics, 35,151–157.
nescu, N., C. Cosma, S. J. Emsley, and P. Shiner, 2004, Illuminating 3Dfractured reservoirs by integrating 2D VSP and vertical incidence data:66th Conference and Exhibition, EAGE, ExpandedAbstractsA032.
ua, B., and G. A. McMechan, 2003, Parsimonious 2D prestack Kirchhoffdepth migration: Geophysics, 68, 1043–1051.
ee, C., 2008, Seismic imaging using image point transform for boreholeseismic data: Ph.D. thesis, Kyoto University.
akahashi, T., 1995, Prestack migration using arrival angle information:Geophysics, 60, 154–163.ang, D., 2004, Vector 3C3D VSP Kirchhoff migration: 74th Annual Inter-national Meeting, SEG, ExpandedAbstracts, 2458–2461.
SEG license or copyright; see Terms of Use at http://segdl.org/