Embed Size (px)
Citation preview

Servomotores
Definición Motor eléctrico síncrono el cual puede ser controlado tanto en velocidad como en
posición.
Tiene la capacidad de girar su eje un cierto ángulo en base a una señal que nosotros
generemos mediante un circuito de control externo.
Tiene integrado al menos un detector que permite conocer su posicionamiento y/o
velocidad.
Par a velocidad cero: Puede ubicarse en cualquier posición manteniéndose estable en
esta.
Operan sobre el principio de control proporcional. Esto significa que el motor
tiende a aplicar la energía necesaria para llevar a cabo la tarea en cuestión = AHORRO.
La cantidad de voltaje aplicado al servomotor es proporcional a la distancia que éste
necesita desplazarse.

Aplicaciones
Sistemas de radio control
Industria, CNC
Robótica
Informática
Electrodomésticos,…
Alta respuesta dinámica
Posicionado preciso
Estabilidad y alto rango de velocidad 6000 rpm
Estabilidad de par
Capacidad de sobrecarga
Idóneos para movimientos precisos y repetitivos
La velocidad no está limitada por la frecuencia de conmutación, caso de MPP
Unas altas prestaciones dinámicas hacen que los procesos de producción
sean mas rápidos, con más ciclos y como consecuencia una mayor eficiencia
de producción.
En sistemas donde el motor se mueve junto con el elemento representa una gran
Ventaja ya que son más ligeros.
Conceptos de control
El objetivo de cualquier sistema de control es poder calcular el ERROR entre el objetivo
(posición/velocidad deseada, introducida por el usuario) y la realidad (lo que dice el
codificador rotatorio).
Control en velocidad:
Posibilidad de hacer girar al motor a una velocidad determinada independientemente de la
carga o fuerza que deba vencer. La tensión de alimentación del estator influye
directamente en la velocidad de rotación.
Control en posición:
- Posibilidad de realizar desplazamientos entre dos posiciones determinadas con precisión.
- La función del controlador de posición es hacer que la posición real del motor coincida
con la programada; eliminando así la desviación o ERROR.

Tipos de servo
C. Continua:
Manejan picos de corriente menores (RC, robótica, vávulas, disco duro,...)
C. Alterna:
Manejan grandes picos de corriente (Industria, ascensores,…)
Brushless (CA o CC sin escobillas)
Evolución
Motores paso a paso: Posicionado a velocidades limitadas (unos
700rpm).Prestaciones dinámicas pobres, rendimiento bajo y
controladores muy simples (frecuencia de conmutación limitada)
lazo abierto.
Servomotor DC de imán permanente. Control de posición en lazo
cerrado. Actualmente usados en aplicaciones de bajo costo.
Servomotor brushless DC. Inercia 10 veces menor que un
servomotor DC. Problema: rizado de par.
Servomotor brushless AC. Control digital y control del lazo de
posición. Prestaciones excelentes.
Década 60:
Década 70:
1985:
1990:
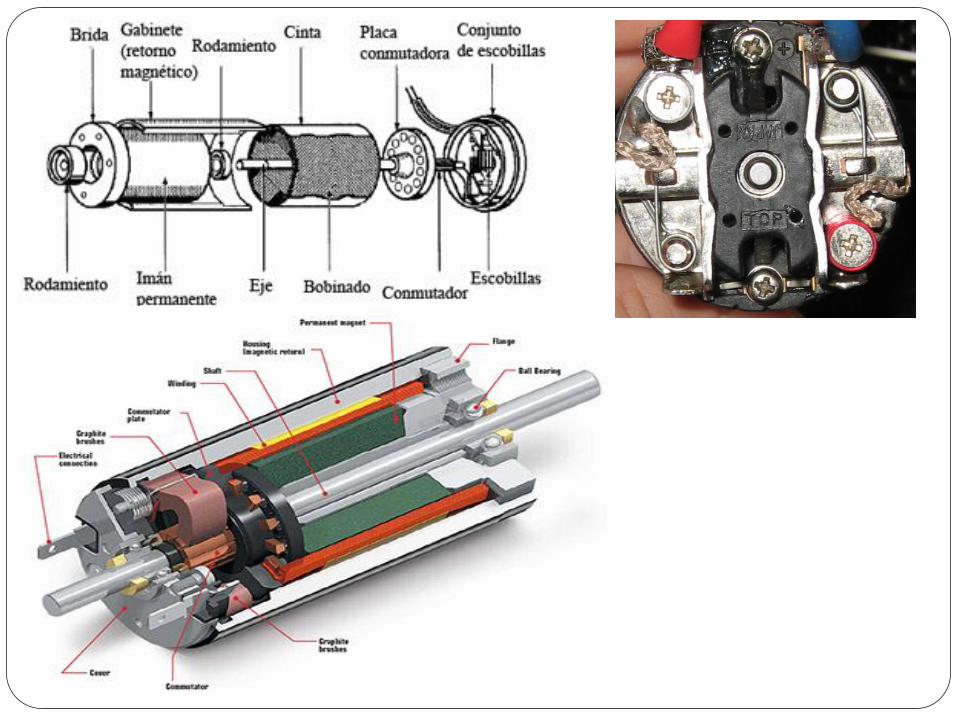
Los primeros servos utilizaban motores de corriente continua de baja inercia. Pero el uso de
escobillas reducía su fiabilidad, pronto se paso a los motores síncronos de imanes
permanentes.
Brushless
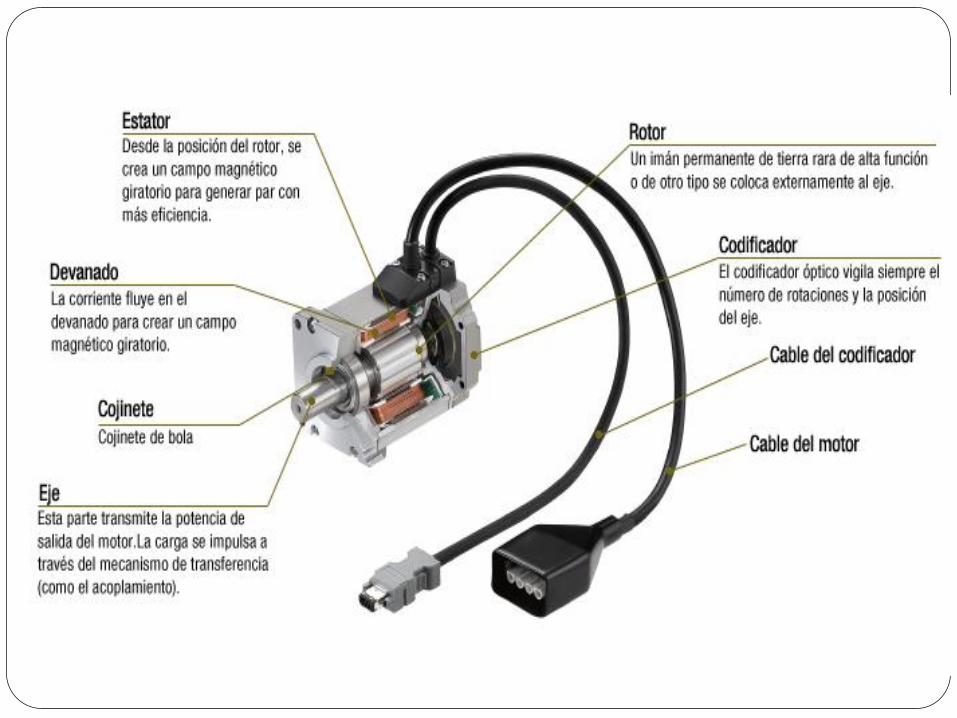
Los servomotores más utilizados en la industria actualmente, son los motores de CA
sin escobillas tipo Brushless. Básicamente están formados por un estator segmentado
en el que hay un bobinado trifásico.
El espacio relleno de cobre es casi el doble que en los motores de jaula equivalentes;
esto permite desarrollar una mayor potencia con un menor volumen.
Para compensar la mayor cantidad de hilo en las ranuras y su mayor generación de
calor, el espacio libre del bobinado se rellena con resina conductora de calor.
El rotor incorpora una serie de imanes permanentes construidos con Nedimio-
Hierro-Boro que proporcionan mayor densidad de flujo, para mejor rendimiento y
obtención de mejor par.
Capaz de desarrollar altos torques (hasta 3 o 4 veces su torque nominal) en forma
transitoria para oponerse a todo esfuerzo que trate de sacarla de sincronismo.
En comparación con motores asíncronos a jaula de ardillas (que tengan el mismo
torque /velocidad en su eje) la inercia de un servomotor brushless es
sustancialmente menor.
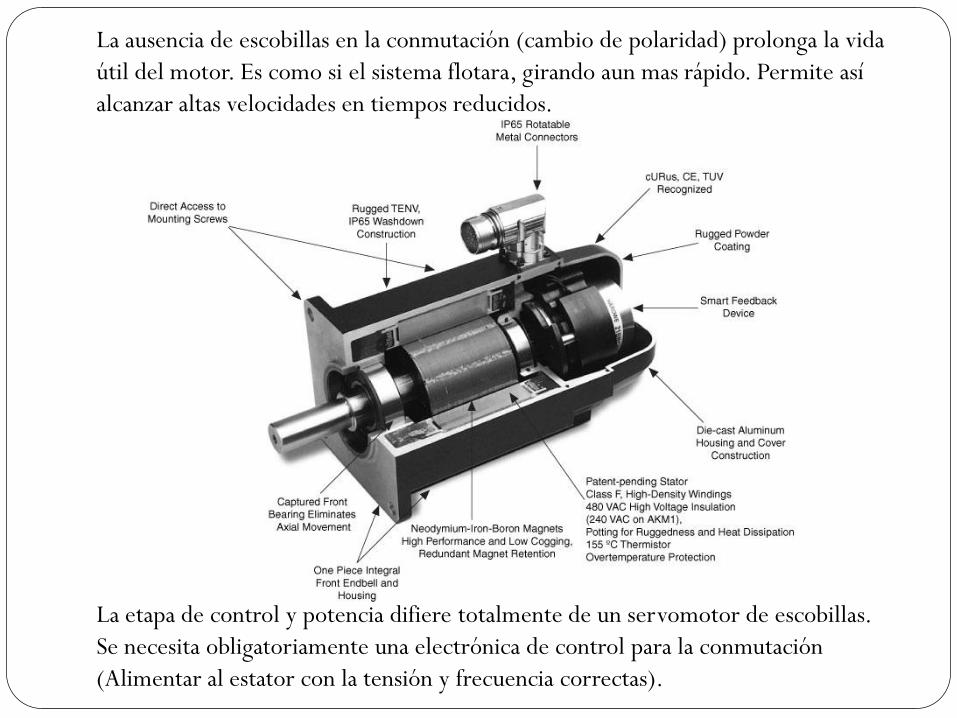
La ausencia de escobillas en la conmutación (cambio de polaridad) prolonga la vida
útil del motor. Es como si el sistema flotara, girando aun mas rápido. Permite así
alcanzar altas velocidades en tiempos reducidos.
La etapa de control y potencia difiere totalmente de un servomotor de escobillas.
Se necesita obligatoriamente una electrónica de control para la conmutación
(Alimentar al estator con la tensión y frecuencia correctas).
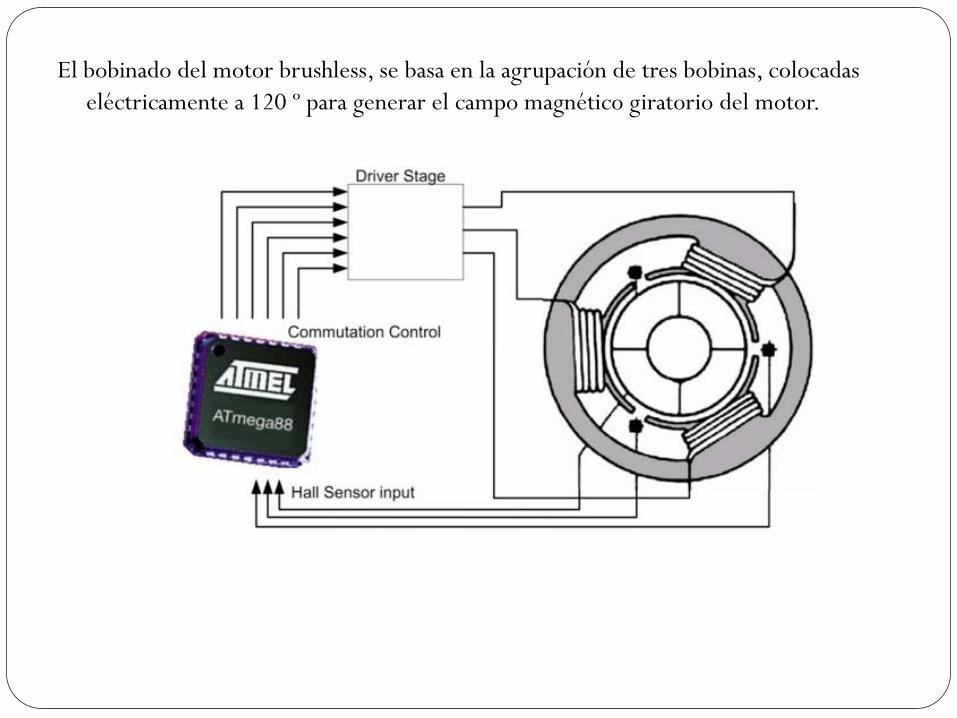
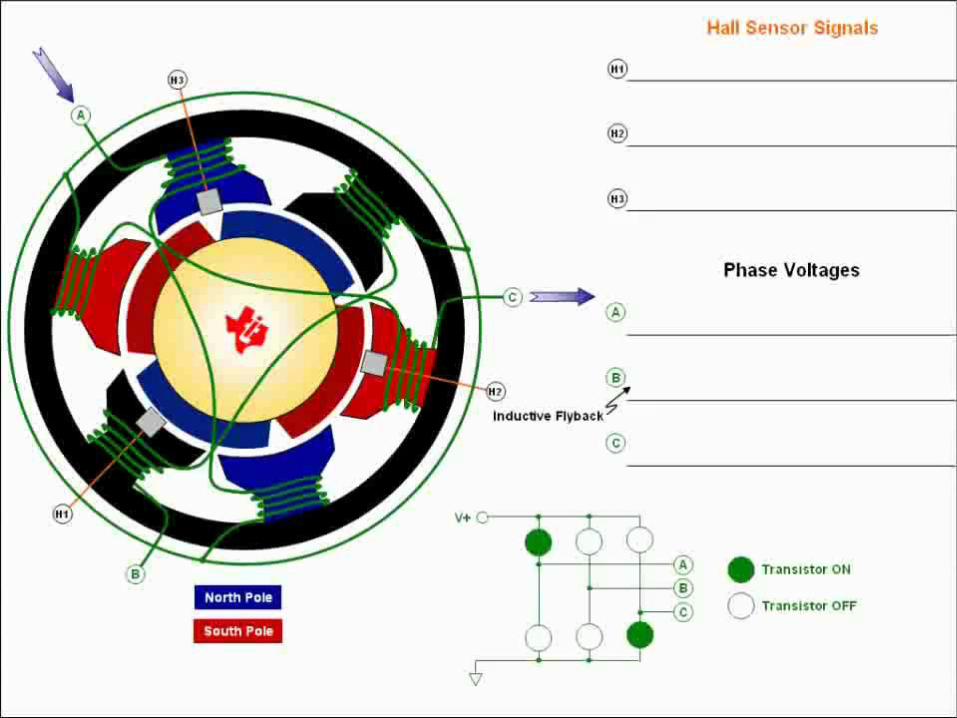
El bobinado del motor brushless, se basa en la agrupación de tres bobinas, colocadas
eléctricamente a 120 º para generar el campo magnético giratorio del motor.
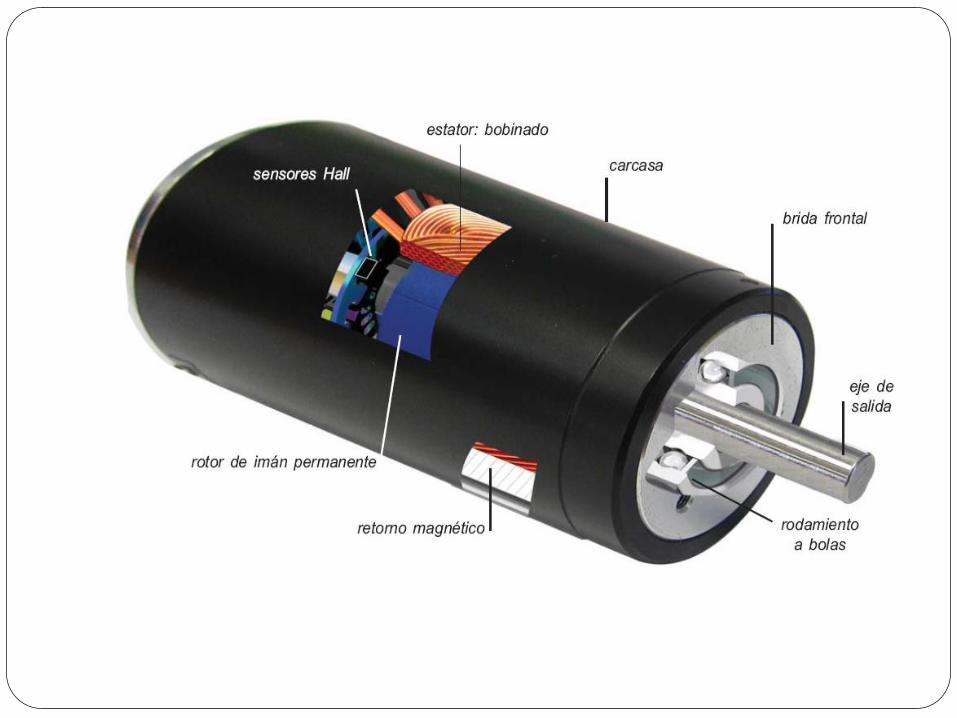
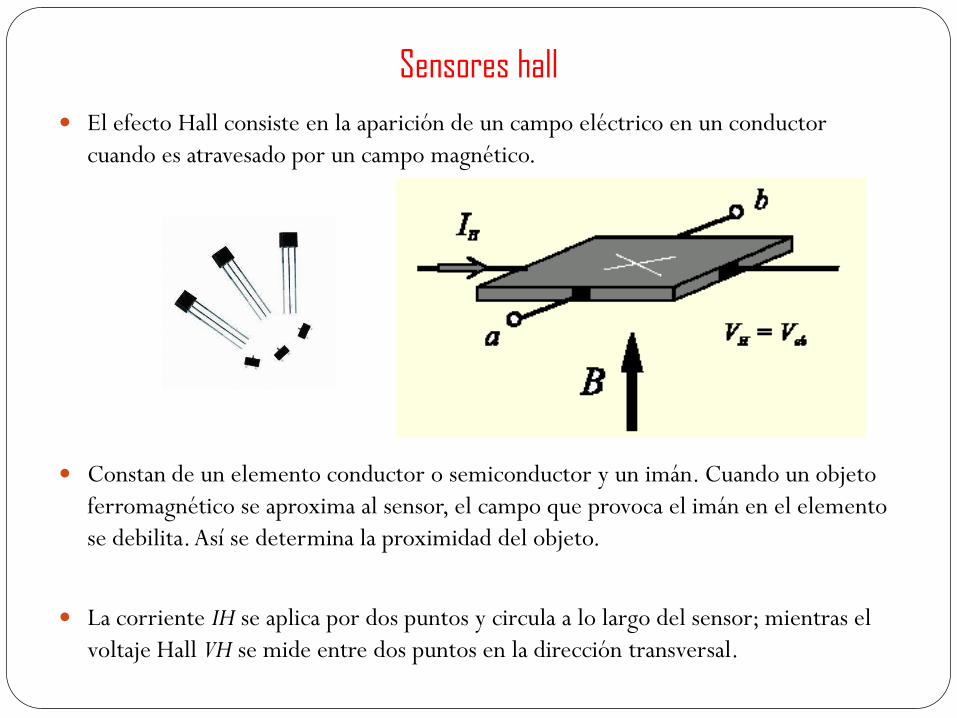
Sensores hall
El efecto Hall consiste en la aparición de un campo eléctrico en un conductor
cuando es atravesado por un campo magnético.
Constan de un elemento conductor o semiconductor y un imán. Cuando un objeto
ferromagnético se aproxima al sensor, el campo que provoca el imán en el elemento
se debilita. Así se determina la proximidad del objeto.
La corriente IH se aplica por dos puntos y circula a lo largo del sensor; mientras el
voltaje Hall VH se mide entre dos puntos en la dirección transversal.
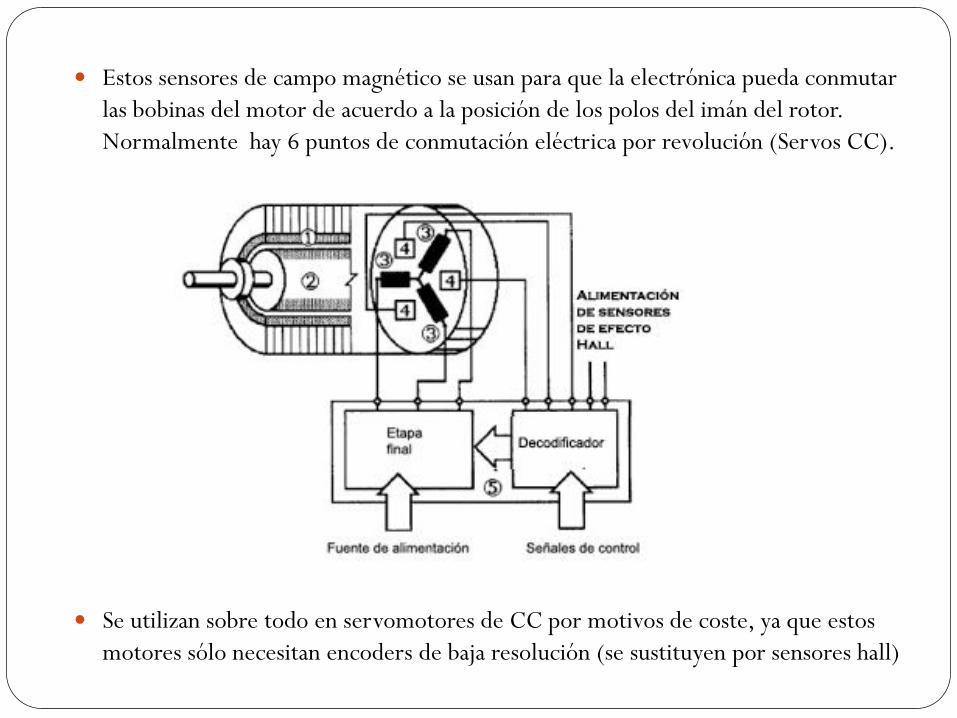
Estos sensores de campo magnético se usan para que la electrónica pueda conmutar
las bobinas del motor de acuerdo a la posición de los polos del imán del rotor.
Normalmente hay 6 puntos de conmutación eléctrica por revolución (Servos CC).
Se utilizan sobre todo en servomotores de CC por motivos de coste, ya que estos
motores sólo necesitan encoders de baja resolución (se sustituyen por sensores hall)
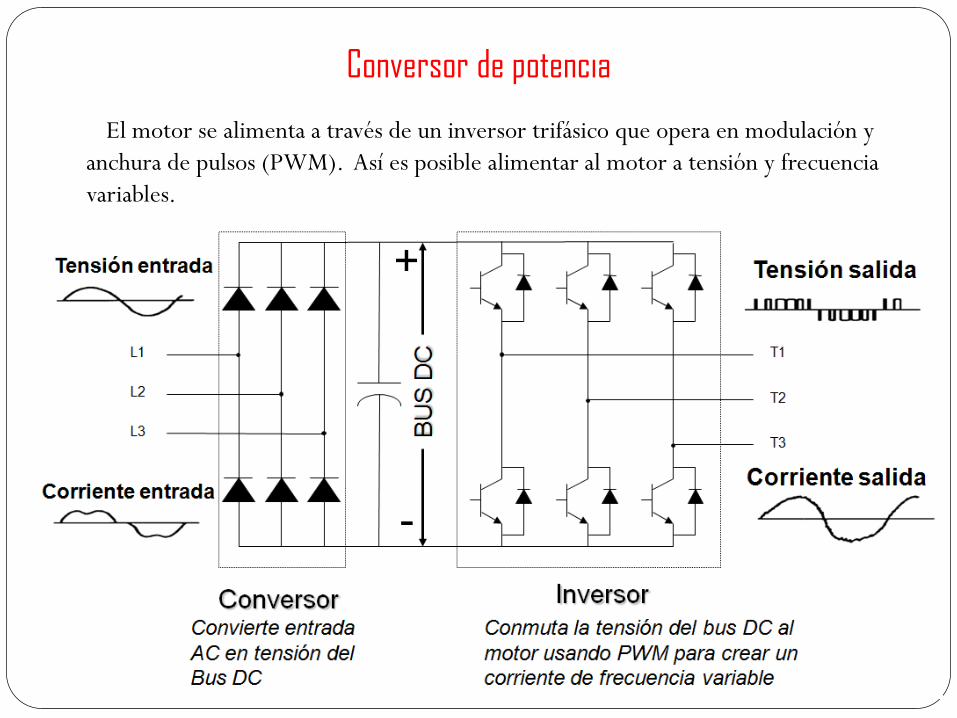
Conversor de potencia
El motor se alimenta a través de un inversor trifásico que opera en modulación y
anchura de pulsos (PWM). Así es posible alimentar al motor a tensión y frecuencia
variables.

Servo motor Industrial CA
En las aplicaciones de posicionamiento industrial se utilizan servomotores con gran
potencia y fiabilidad.
En el servomotor síncrono CA el par es determinado por el bobinado estatórico
alimentado por una corriente trifásica sinusoidal en relación con el campo magnético
proporcionado por los imanes del rotor.
Los drivers para este tipo de motores llevan controles PID y normalmente se pueden
controlar desde un PC a través de un protocolo de comunicaciones CAN-BUS .
Características
No necesitan apenas mantenimiento: La falta de fricción entre los elementos hace
que el deterioro sea bajo.
Gran dinámica: Buen control de velocidad, posición y dirección.
Gran capacidad de sobrecarga: Pueden trabajar tres veces más rápido y potente que
su velocidad y torque nominal sin que sufran daño alguno.
Bajo momento de inercia en el rotor.
Conectores rápidos para su control y conexión.
Bajo consumo de energía; al contrario que los motores hidráulicos este sólo consume
energía al realizar la tarea programada.
Son 40-50% menos pesados que los hidráulicos.
Mayor eliminación del calor
Excelentes valores de aceleración
Amplia gama de potencias (de 100w a 300Kw)
El tamaño reducido no incide en su potencia.
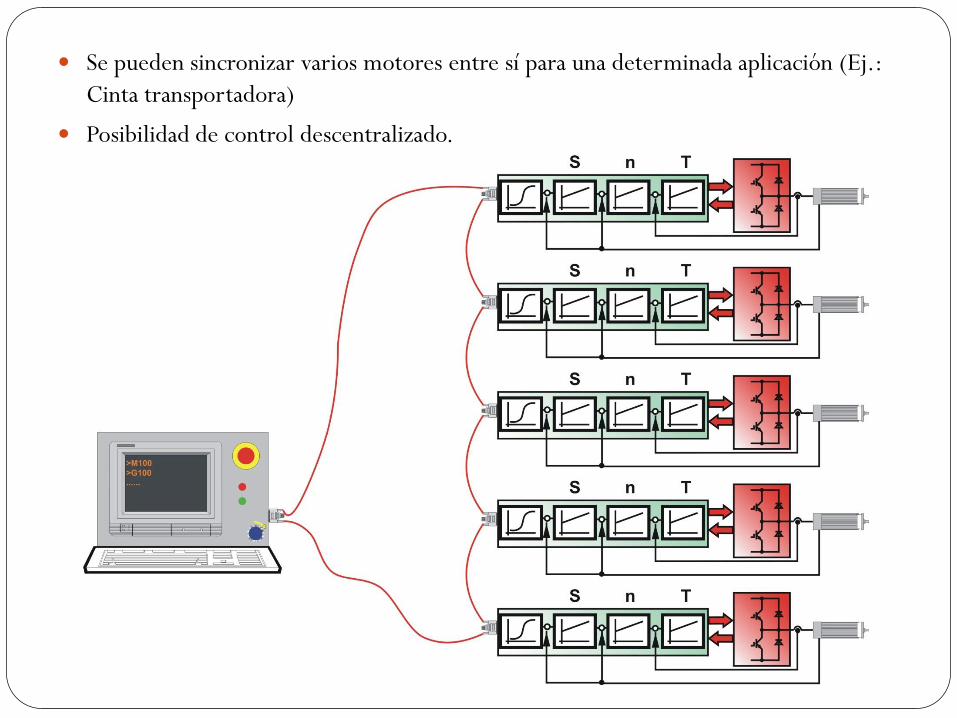
Se pueden sincronizar varios motores entre sí para una determinada aplicación (Ej.:
Cinta transportadora)
Posibilidad de control descentralizado.
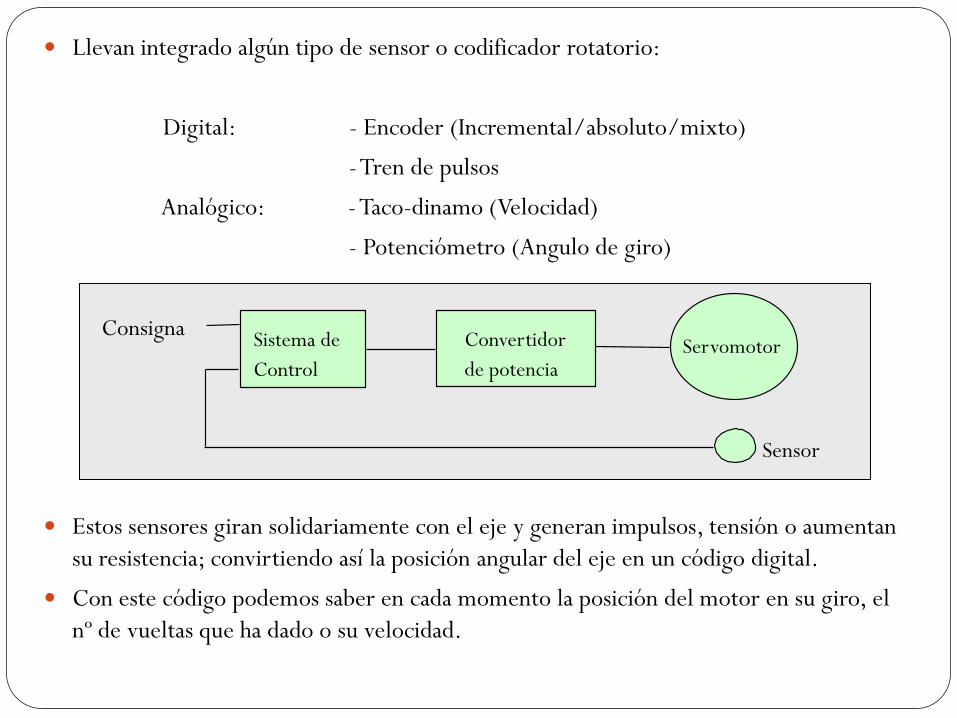
Llevan integrado algún tipo de sensor o codificador rotatorio:
Digital: - Encoder (Incremental/absoluto/mixto)
- Tren de pulsos
Analógico: - Taco-dinamo (Velocidad)
- Potenciómetro (Angulo de giro)
Estos sensores giran solidariamente con el eje y generan impulsos, tensión o aumentan
su resistencia; convirtiendo así la posición angular del eje en un código digital.
Con este código podemos saber en cada momento la posición del motor en su giro, el
nº de vueltas que ha dado o su velocidad.
Sistema de
Control
Convertidor
de potencia Servomotor
Consigna
Sensor
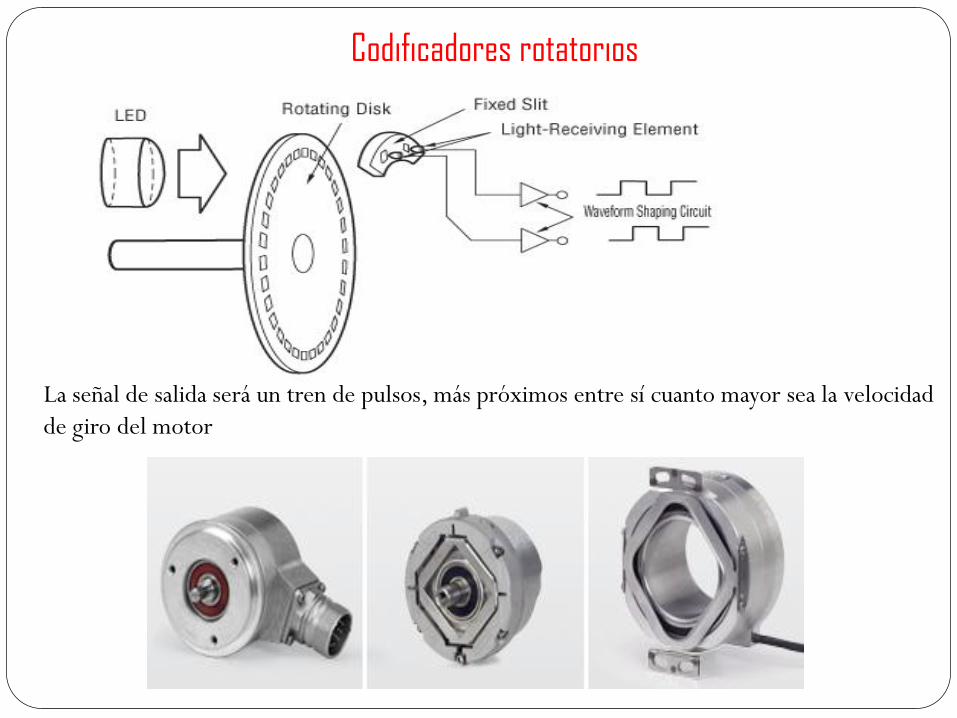
La señal de salida será un tren de pulsos, más próximos entre sí cuanto mayor sea la velocidad
de giro del motor
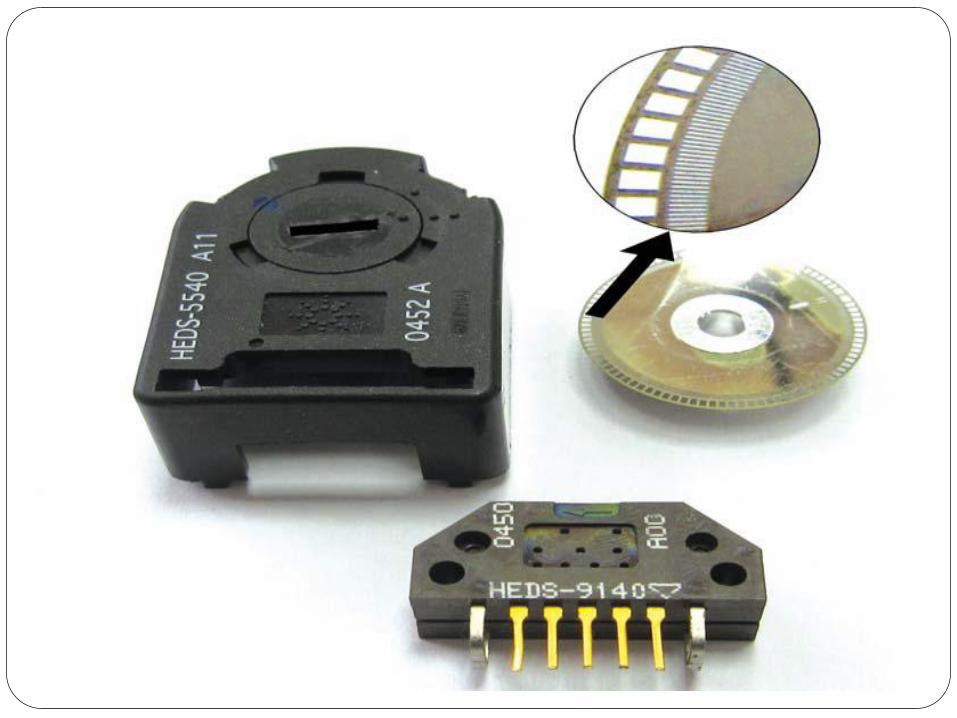
Codificadores rotatorios
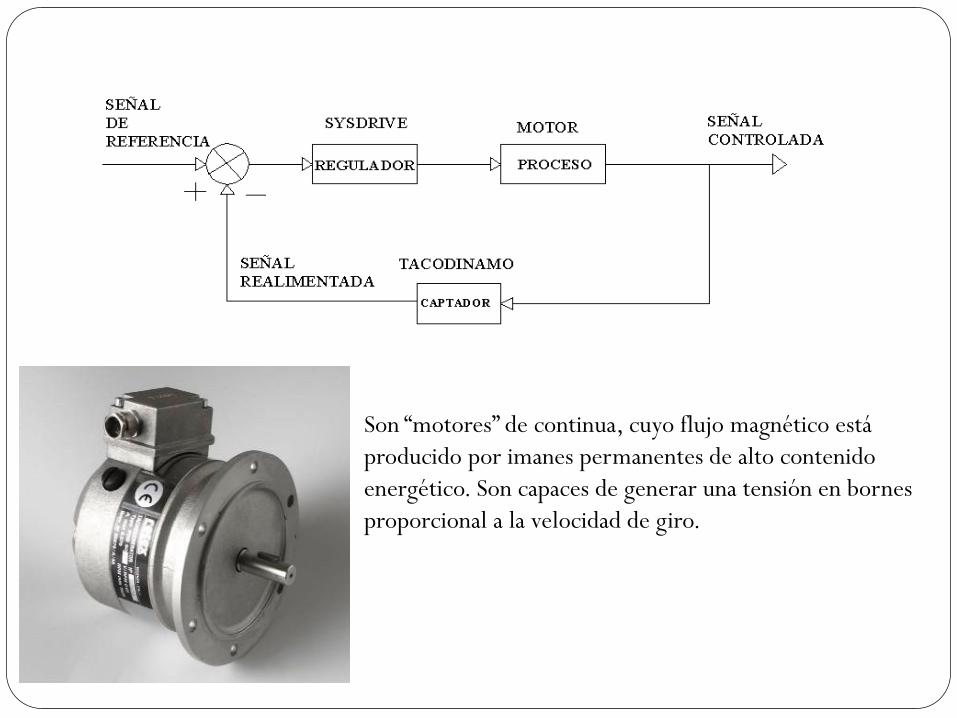
Son “motores” de continua, cuyo flujo magnético está
producido por imanes permanentes de alto contenido
energético. Son capaces de generar una tensión en bornes
proporcional a la velocidad de giro.
Comparación Brushless CC y CA
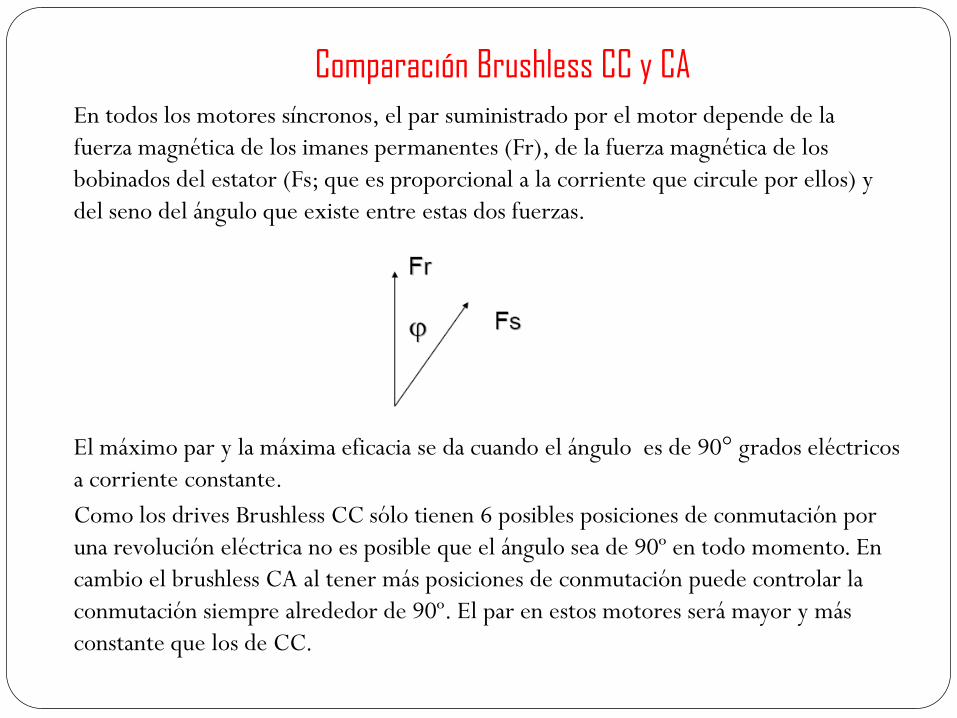
En todos los motores síncronos, el par suministrado por el motor depende de la
fuerza magnética de los imanes permanentes (Fr), de la fuerza magnética de los
bobinados del estator (Fs; que es proporcional a la corriente que circule por ellos) y
del seno del ángulo que existe entre estas dos fuerzas.
El máximo par y la máxima eficacia se da cuando el ángulo es de 90° grados eléctricos
a corriente constante.
Como los drives Brushless CC sólo tienen 6 posibles posiciones de conmutación por
una revolución eléctrica no es posible que el ángulo sea de 90º en todo momento. En
cambio el brushless CA al tener más posiciones de conmutación puede controlar la
conmutación siempre alrededor de 90º. El par en estos motores será mayor y más
constante que los de CC.
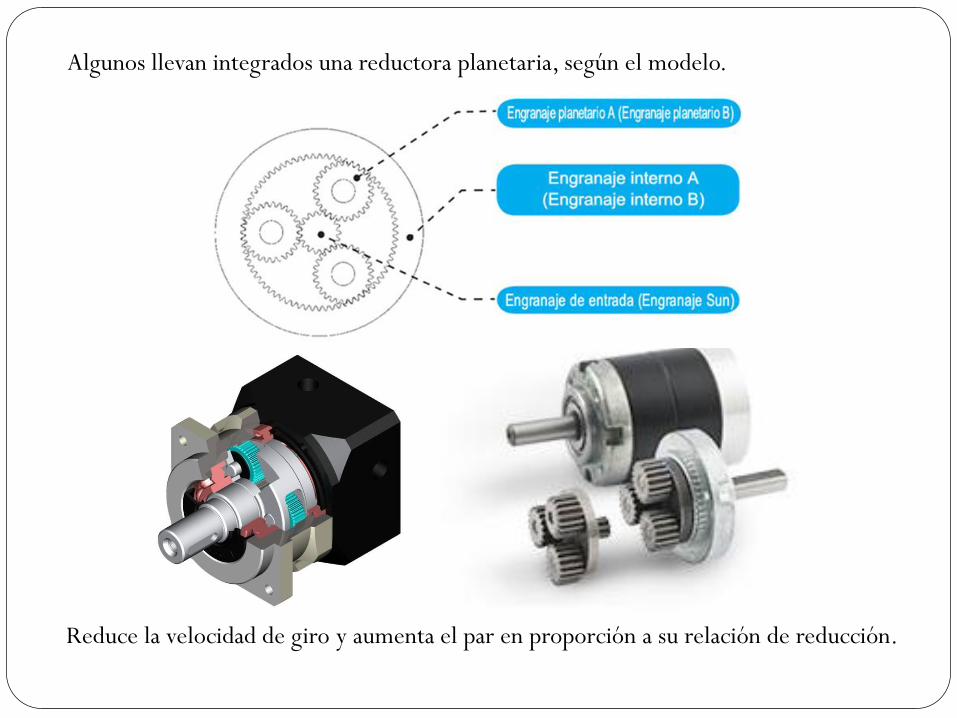
Algunos llevan integrados una reductora planetaria, según el modelo.
Reduce la velocidad de giro y aumenta el par en proporción a su relación de reducción.
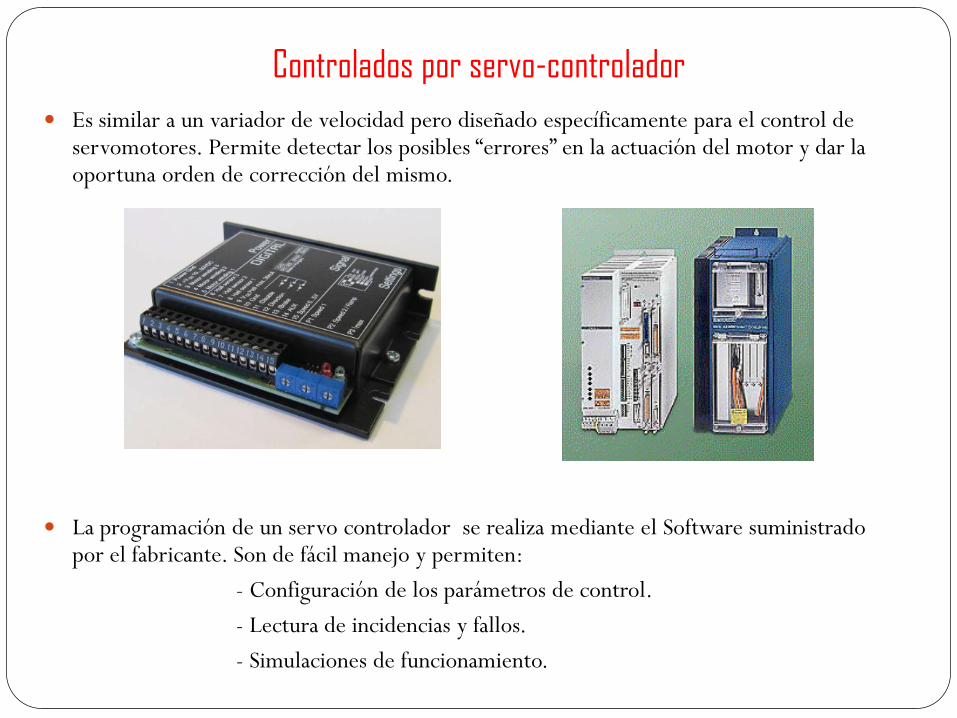
Controlados por servo-controlador
Es similar a un variador de velocidad pero diseñado específicamente para el control de servomotores. Permite detectar los posibles “errores” en la actuación del motor y dar la oportuna orden de corrección del mismo.
La programación de un servo controlador se realiza mediante el Software suministrado por el fabricante. Son de fácil manejo y permiten:
- Configuración de los parámetros de control.
- Lectura de incidencias y fallos.
- Simulaciones de funcionamiento.
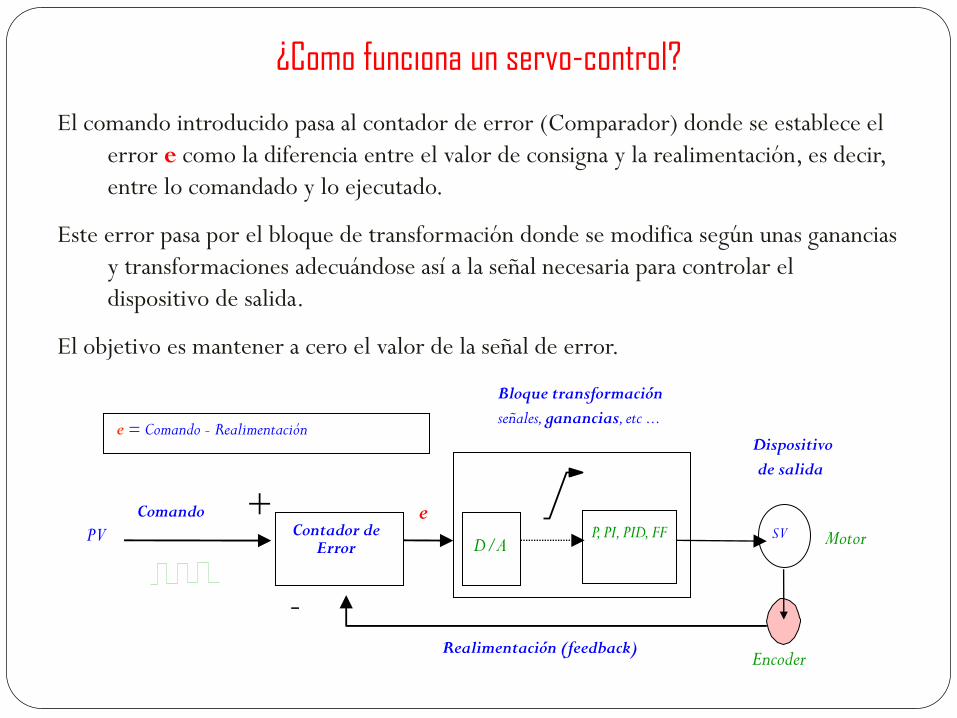
¿Como funciona un servo-control?
El comando introducido pasa al contador de error (Comparador) donde se establece el
error e como la diferencia entre el valor de consigna y la realimentación, es decir,
entre lo comandado y lo ejecutado.
Este error pasa por el bloque de transformación donde se modifica según unas ganancias
y transformaciones adecuándose así a la señal necesaria para controlar el
dispositivo de salida.
El objetivo es mantener a cero el valor de la señal de error.
Contador de Error D/A
SV
Encoder
Comando e
-
Motor
Realimentación (feedback)
Bloque transformación
señales, ganancias, etc ...
P, PI, PID, FF
e = Comando - Realimentación
PV
Dispositivo
de salida
+
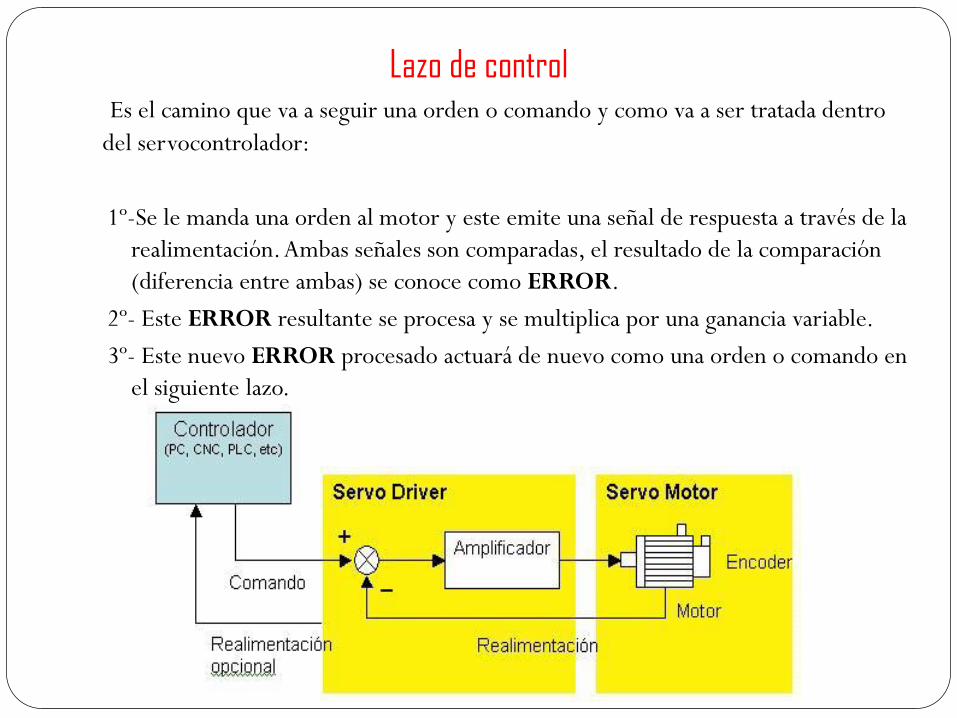
Lazo de control Es el camino que va a seguir una orden o comando y como va a ser tratada dentro
del servocontrolador:
1º-Se le manda una orden al motor y este emite una señal de respuesta a través de la
realimentación. Ambas señales son comparadas, el resultado de la comparación
(diferencia entre ambas) se conoce como ERROR.
2º- Este ERROR resultante se procesa y se multiplica por una ganancia variable.
3º- Este nuevo ERROR procesado actuará de nuevo como una orden o comando en
el siguiente lazo.
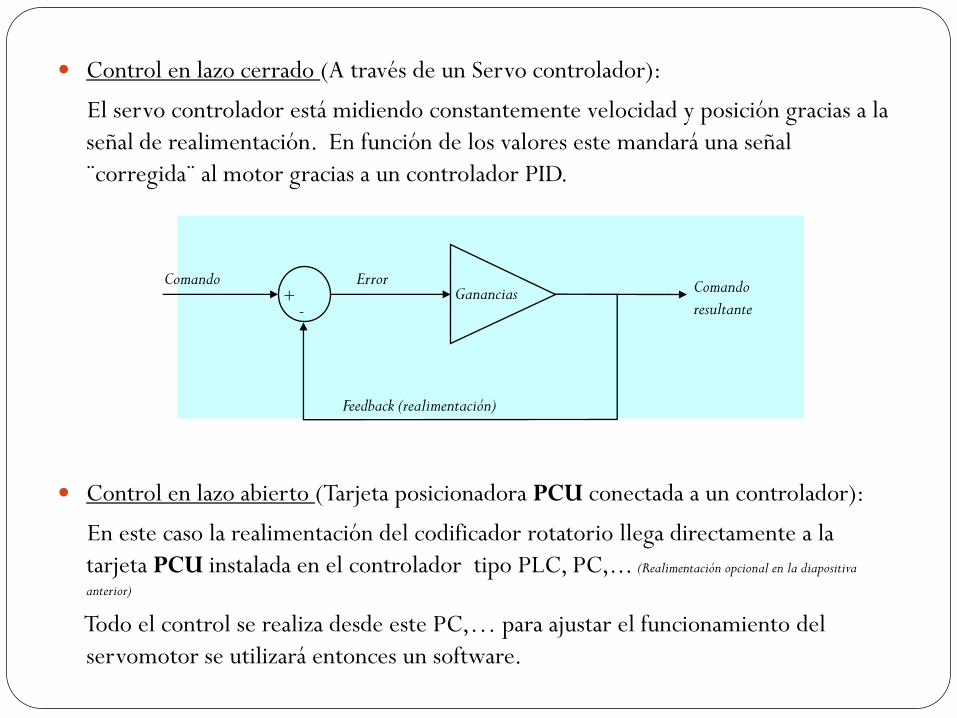
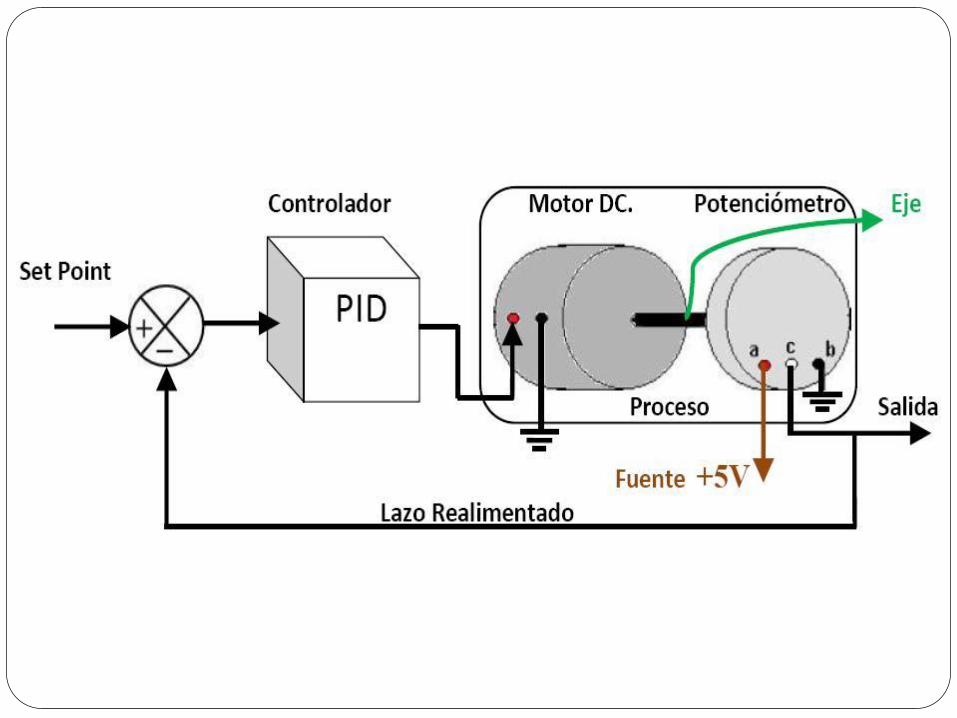
Control en lazo cerrado (A través de un Servo controlador):
El servo controlador está midiendo constantemente velocidad y posición gracias a la
señal de realimentación. En función de los valores este mandará una señal
¨corregida¨ al motor gracias a un controlador PID.
Control en lazo abierto (Tarjeta posicionadora PCU conectada a un controlador):
En este caso la realimentación del codificador rotatorio llega directamente a la
tarjeta PCU instalada en el controlador tipo PLC, PC,... (Realimentación opcional en la diapositiva
anterior)
Todo el control se realiza desde este PC,… para ajustar el funcionamiento del
servomotor se utilizará entonces un software.
Comando Error
Feedback (realimentación)
Ganancias Comando
resultante +
-
Tipos de lazo según señal
Lazo de par:
Asegura que el motor aplique la cantidad correcta de par.
En el modo de control de par, el motor gira a cualquier velocidad que el par
permita. En trabajos sin carga, por ejemplo, utilizará poco par para ir a la máxima
velocidad.
Lazo de velocidad:
Asegura que el motor gire a la velocidad que se le ha ordenado.
Gracias a éste lazo, el motor, girará a la velocidad ordenada; aplicando además la
cantidad máxima de par que tiene disponible para esta velocidad.
Lazo de posición:
Asegura que la carga se sitúe en la posición comandada.
Para un control preciso de posición el amplificador debe controlar la velocidad y el
par del motor.
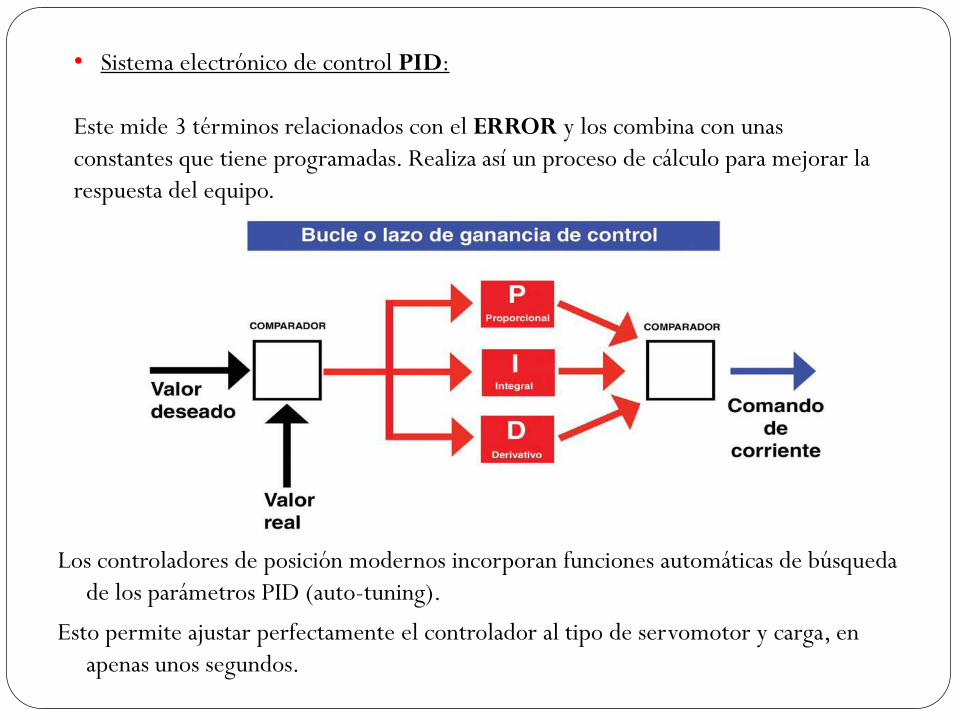
Los controladores de posición modernos incorporan funciones automáticas de búsqueda
de los parámetros PID (auto-tuning).
Esto permite ajustar perfectamente el controlador al tipo de servomotor y carga, en
apenas unos segundos.
• Sistema electrónico de control PID:
Este mide 3 términos relacionados con el ERROR y los combina con unas
constantes que tiene programadas. Realiza así un proceso de cálculo para mejorar la
respuesta del equipo.
Control Proporcional (P)
El primer término que mide el controlador es proporcional al ERROR. Este tipo de
control lo realiza un amplificador de ganancia ajustable cuyo objetivo es tratar de
reducir el ERROR actual (instantáneo). Lo lee y aumenta o reduce la señal ajustándose
así al objetivo.
El segundo término detectado es proporcional a la integral del ERROR (los valores de
este se van sumando). En este caso lo que se está midiendo es si el ERROR ha sido
algo puntual o si es constante (lleva ocurriendo un rato).
La ganancia integral ayuda sobre todo cuando hay poco ERROR, como durante una
operación de velocidad constante.
Control Integral (I)
Posee un efecto de anticipación a la diferencia entre señales, por lo que tiende a corregir
antes que la señal de ERROR sea excesiva. La derivada del error permite conocer la
tendencia (crecimiento o decrecimiento). Se van restando valores sucesivos del
ERROR para ver su evolución.
Este sistema de control no es muy efectivo si la situación de ERROR es constante (el
resultado de su derivada sería cero), entonces el control adoptaría una acción pasiva y
no llevará a eliminarlo.
Control Derivativo (D)
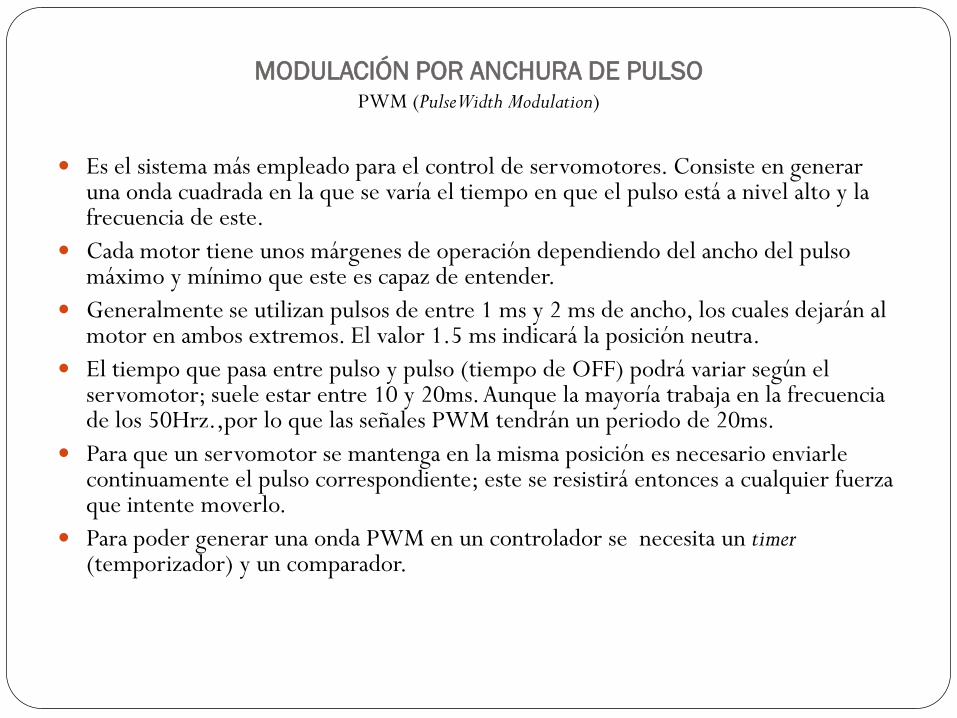
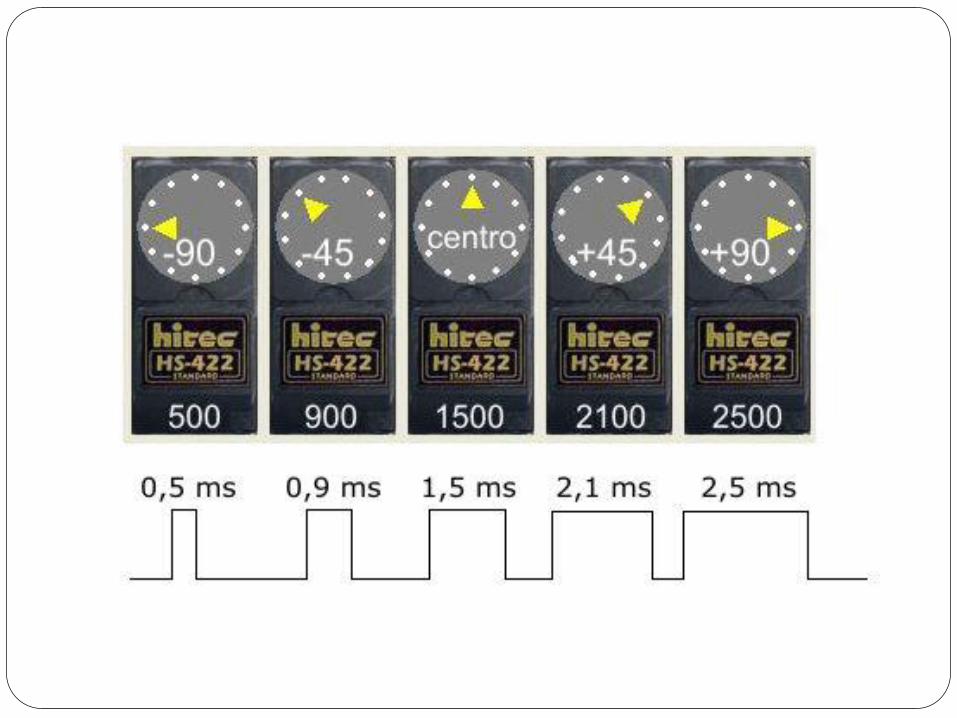
MODULACIÓN POR ANCHURA DE PULSO PWM (Pulse Width Modulation)
Es el sistema más empleado para el control de servomotores. Consiste en generar una onda cuadrada en la que se varía el tiempo en que el pulso está a nivel alto y la frecuencia de este.
Cada motor tiene unos márgenes de operación dependiendo del ancho del pulso máximo y mínimo que este es capaz de entender.
Generalmente se utilizan pulsos de entre 1 ms y 2 ms de ancho, los cuales dejarán al motor en ambos extremos. El valor 1.5 ms indicará la posición neutra.
El tiempo que pasa entre pulso y pulso (tiempo de OFF) podrá variar según el servomotor; suele estar entre 10 y 20ms. Aunque la mayoría trabaja en la frecuencia de los 50Hrz.,por lo que las señales PWM tendrán un periodo de 20ms.
Para que un servomotor se mantenga en la misma posición es necesario enviarle continuamente el pulso correspondiente; este se resistirá entonces a cualquier fuerza que intente moverlo.
Para poder generar una onda PWM en un controlador se necesita un timer (temporizador) y un comparador.
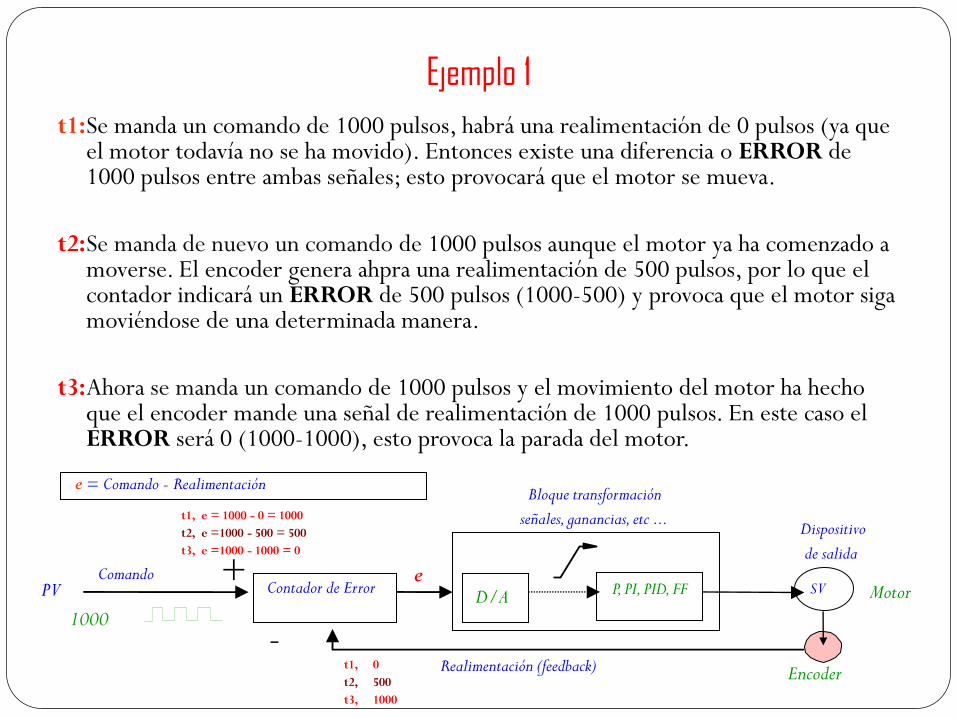
Ejemplo 1
t1: Se manda un comando de 1000 pulsos, habrá una realimentación de 0 pulsos (ya que el motor todavía no se ha movido). Entonces existe una diferencia o ERROR de 1000 pulsos entre ambas señales; esto provocará que el motor se mueva.
t2: Se manda de nuevo un comando de 1000 pulsos aunque el motor ya ha comenzado a moverse. El encoder genera ahpra una realimentación de 500 pulsos, por lo que el contador indicará un ERROR de 500 pulsos (1000-500) y provoca que el motor siga moviéndose de una determinada manera.
t3: Ahora se manda un comando de 1000 pulsos y el movimiento del motor ha hecho que el encoder mande una señal de realimentación de 1000 pulsos. En este caso el ERROR será 0 (1000-1000), esto provoca la parada del motor.
Contador de Error D/A SV
Encoder
Comando e
t1, 0
t2, 500
t3, 1000
-
Motor
Realimentación (feedback)
Bloque transformación
señales, ganancias, etc ...
P, PI, PID, FF
e = Comando - Realimentación
t1, e = 1000 - 0 = 1000
t2, e =1000 - 500 = 500
t3, e =1000 - 1000 = 0
1000
PV
Dispositivo
de salida
+
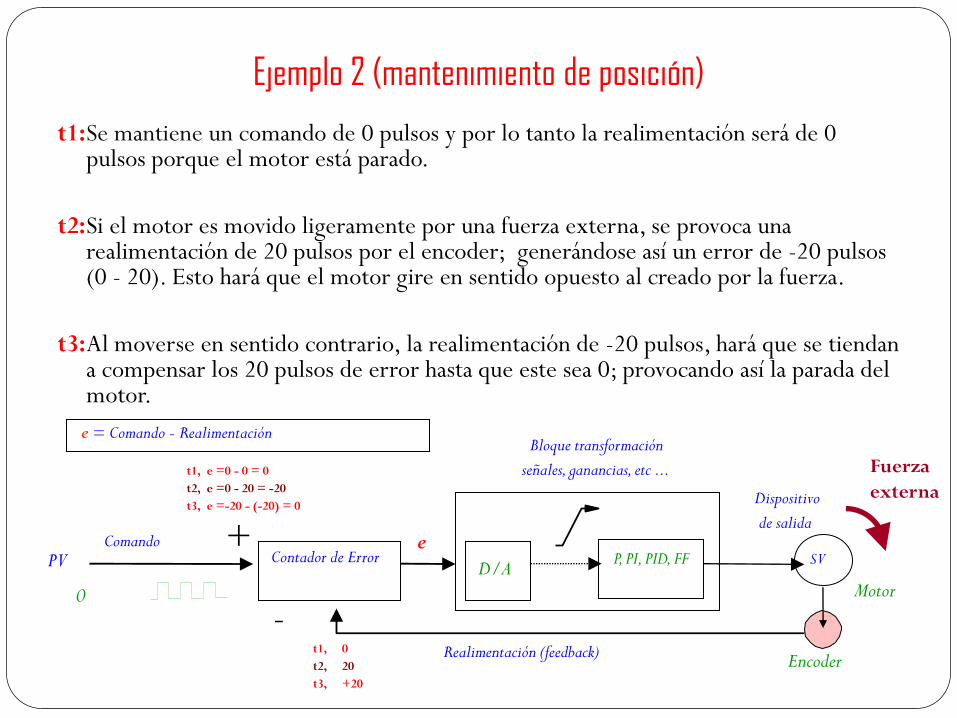
Ejemplo 2 (mantenimiento de posición)
t1: Se mantiene un comando de 0 pulsos y por lo tanto la realimentación será de 0 pulsos porque el motor está parado.
t2: Si el motor es movido ligeramente por una fuerza externa, se provoca una realimentación de 20 pulsos por el encoder; generándose así un error de -20 pulsos (0 - 20). Esto hará que el motor gire en sentido opuesto al creado por la fuerza.
t3: Al moverse en sentido contrario, la realimentación de -20 pulsos, hará que se tiendan a compensar los 20 pulsos de error hasta que este sea 0; provocando así la parada del motor.
Contador de Error D/A
SV
Encoder
Comando e
t1, 0
t2, 20
t3, +20
- Motor
Realimentación (feedback)
Bloque transformación
señales, ganancias, etc ...
P, PI, PID, FF
e = Comando - Realimentación
t1, e =0 - 0 = 0
t2, e =0 - 20 = -20
t3, e =-20 - (-20) = 0
0
PV
Dispositivo
de salida +
Fuerza
externa
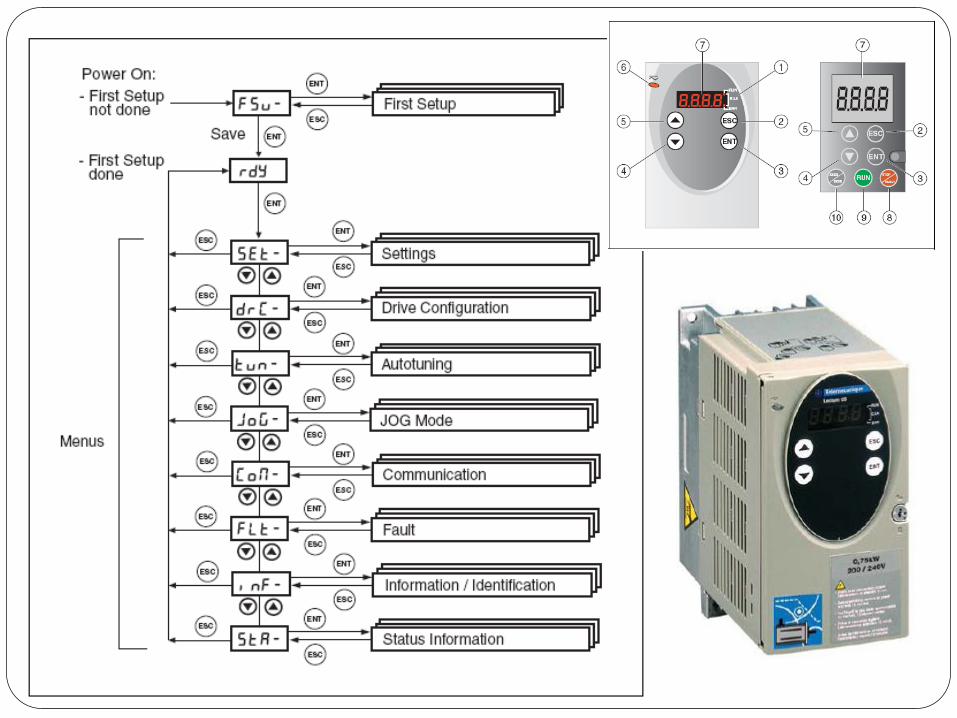
Puesta en marcha / Configuración del software
Para ello es necesario instalar el programa en nuestro PC y todos sus drivers. Una vez
hecho esto debemos configurar la comunicación del ordenador con nuestro equipo.
Una vez hecho esto se va pasando por las distintas pantallas:
- Selección de parámetros iniciales (modelo de motor y controlador)
- Escala mecánica (Tipo de transmisión de movimiento, carga,…)
- Escalado de señal: Relación entre la V de entrada analógica y el nº de pulsos
equivalente. Ej.: Podremos indicarle que velocidad le corresponderá al motor mediante
una entrada de 10 voltios de señal al servo-controlador.
- Determinar los límites del accionamiento (Sólo para servomotores que NO
funcionen en rotación contínua)
- Configuración encoder (si es incremental, absoluto, sentido giro,…)
- Configuración de las salidas analógicas.
Algunas opciones que ofrece (Según software)
Monitorización a tiempo real del comportamiento del motor (velocidad actual del
eje, velocidad de referencia, posición de este,…)
Movimiento manual tomamos el mando del motor de manera manual pero a través
del PC.
Función osciloscopio permite medir los valores eléctricos y mecánicos del eje (curva
par/velocidad).
Control de respuesta dinámica optimizando así la respuesta del motor al sistema
mecánico que moverá el motor (auto-tunnig).
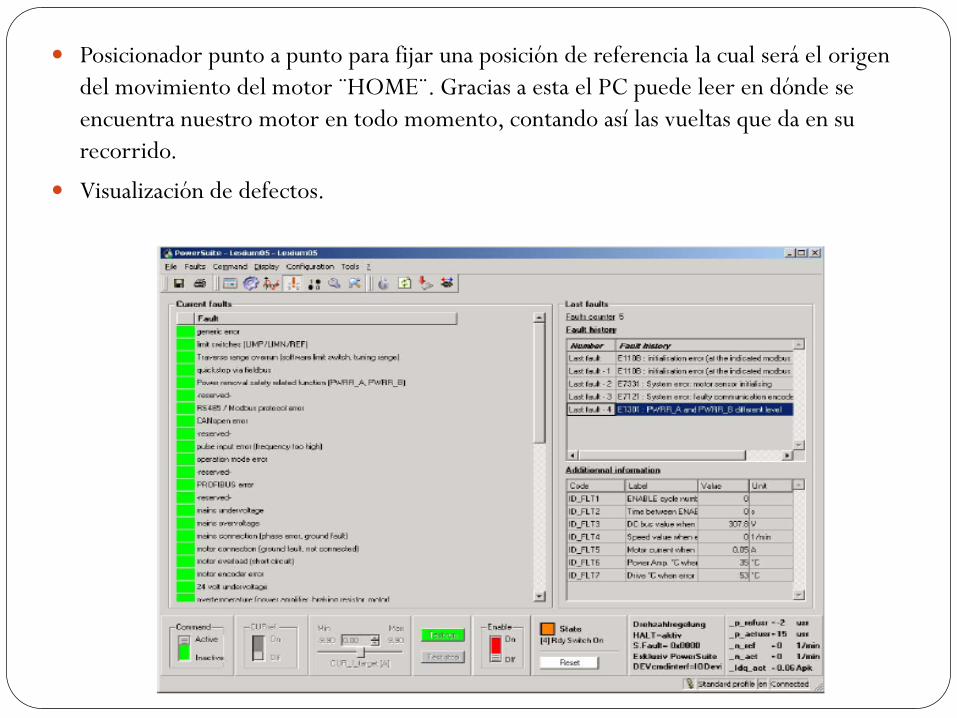
Posicionador punto a punto para fijar una posición de referencia la cual será el origen
del movimiento del motor ¨HOME¨. Gracias a esta el PC puede leer en dónde se
encuentra nuestro motor en todo momento, contando así las vueltas que da en su
recorrido.
Visualización de defectos.
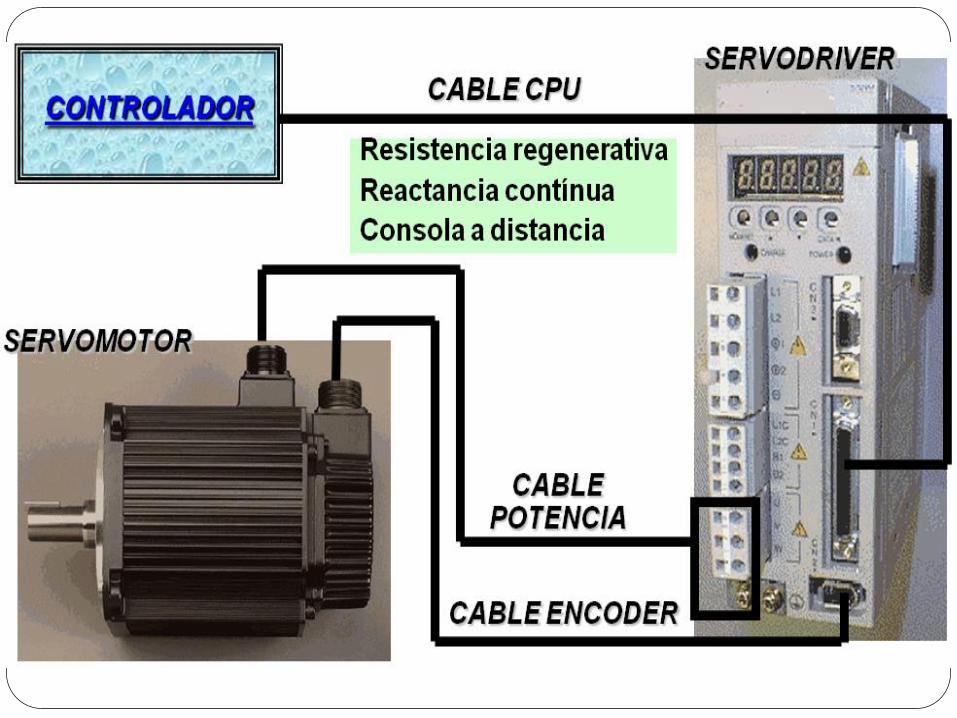
La energía regenerativa se produce cuando el motor está funcionando como generador, como ocurre
en el caso de la deceleración del servomotor (frenado) o cambio de sentido de giro, y es absorbida
por los condensadores o resistencias internos del servo-controlador previniendo un aumento en la
tensión del bus DC.
Si la energía almacenada en el condensador o resistencia no se libera durante el ciclo de trabajo, se
seguirán cargando hasta la saturación, produciéndose un error de SOBRETENSIÓN.
Como tratar el problema de la energía regenerativa
Para evitar que se supere la cantidad de energía que pueden absorber los condensadores o
resistencias: Disminuir la velocidad de rotación.
Alargar el tiempo de deceleración.
Alargar el ciclo de operación.
Conectar una resistencia de regeneración.
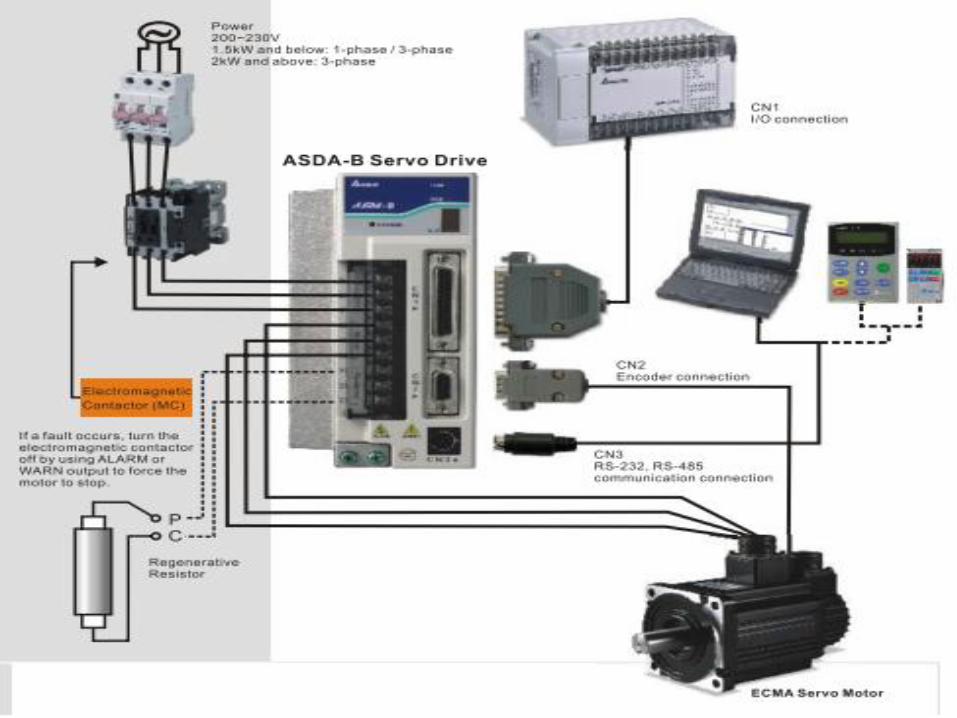
Usan condensadores y resistencias internas (chopper de frenado internos) para absorber la energía
regenerativa. Esta resistencia interna se puede deshabilitar y conectar una resistencia externa de
regeneración en caso de necesidad de disipar más potencia
Selección del servomotor
Para el cálculo de la velocidad y el par en el eje del servomotor es
necesario tener en cuenta:
El movimiento de la máquina.
- Movimiento de rotación.
- Movimiento horizontal.
- Movimiento vertical.
El sistema de transmisión.
También es necesario conocer la inercia equivalente de la carga
acoplada al eje del motor, lo ideal sería que estos valores fueran iguales.
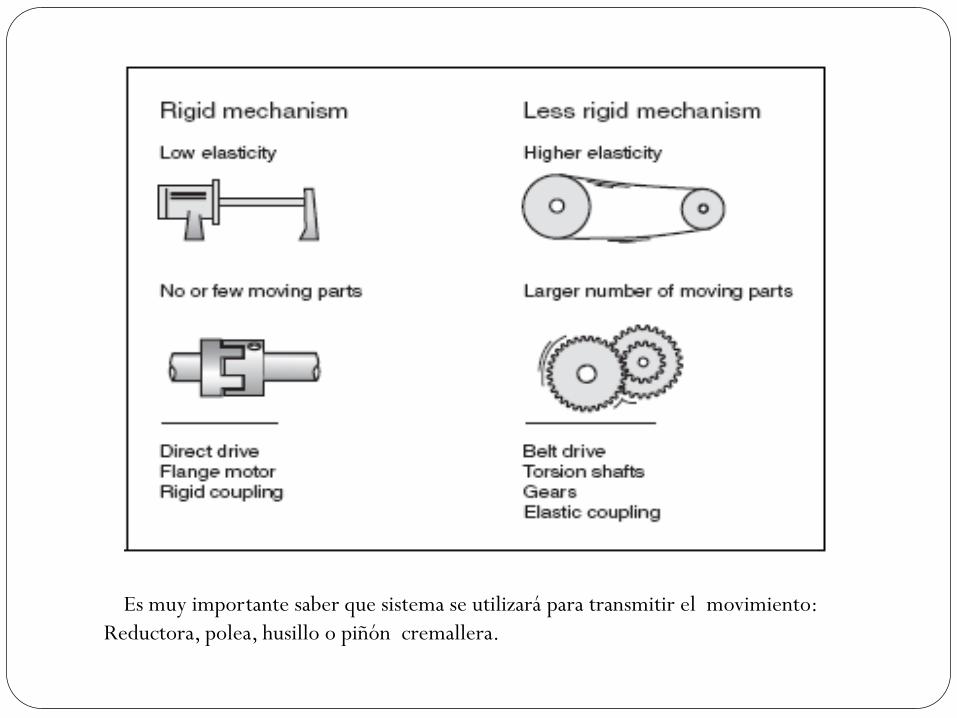
Es muy importante saber que sistema se utilizará para transmitir el movimiento:
Reductora, polea, husillo o piñón cremallera.

Medición de la resistencia del sistema por medio de dinamómetro, peso o con un
motor DC de medida.
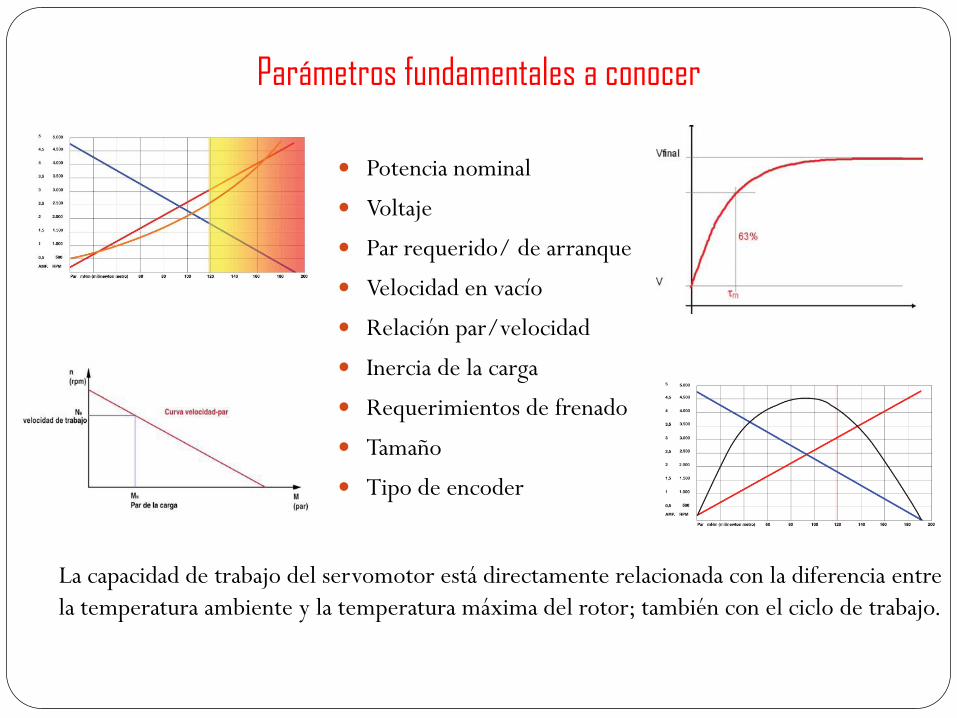
Parámetros fundamentales a conocer
Potencia nominal
Voltaje
Par requerido/ de arranque
Velocidad en vacío
Relación par/velocidad
Inercia de la carga
Requerimientos de frenado
Tamaño
Tipo de encoder
La capacidad de trabajo del servomotor está directamente relacionada con la diferencia entre
la temperatura ambiente y la temperatura máxima del rotor; también con el ciclo de trabajo.
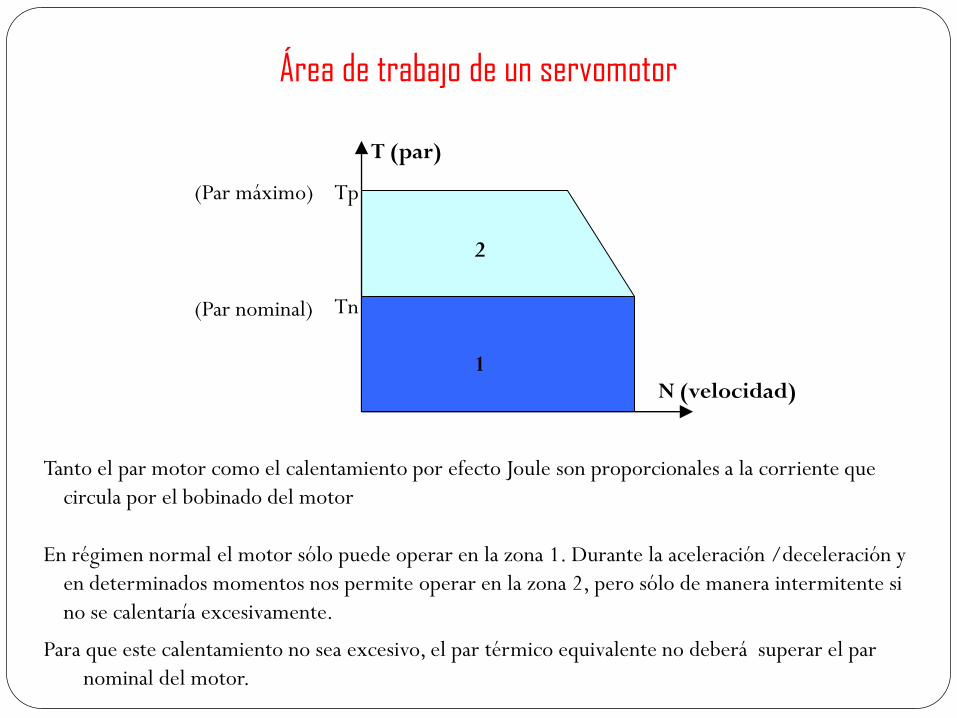
Tanto el par motor como el calentamiento por efecto Joule son proporcionales a la corriente que
circula por el bobinado del motor
En régimen normal el motor sólo puede operar en la zona 1. Durante la aceleración /deceleración y
en determinados momentos nos permite operar en la zona 2, pero sólo de manera intermitente si
no se calentaría excesivamente.
Área de trabajo de un servomotor
Tp
Tn
T (par)
N (velocidad)
(Par nominal)
(Par máximo)
2
1
Para que este calentamiento no sea excesivo, el par térmico equivalente no deberá superar el par
nominal del motor.
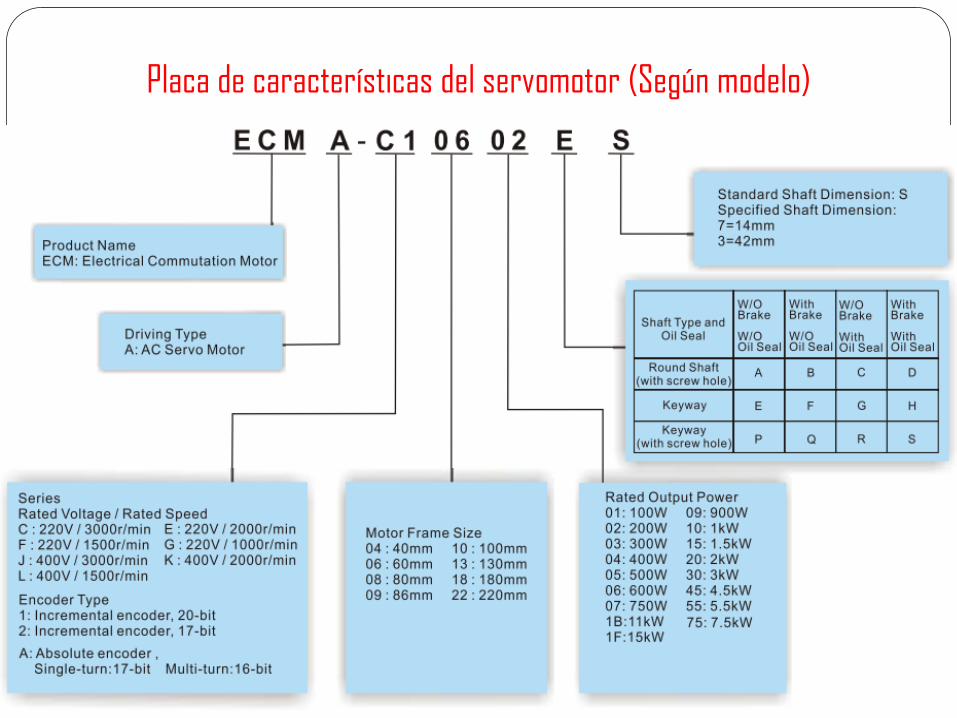
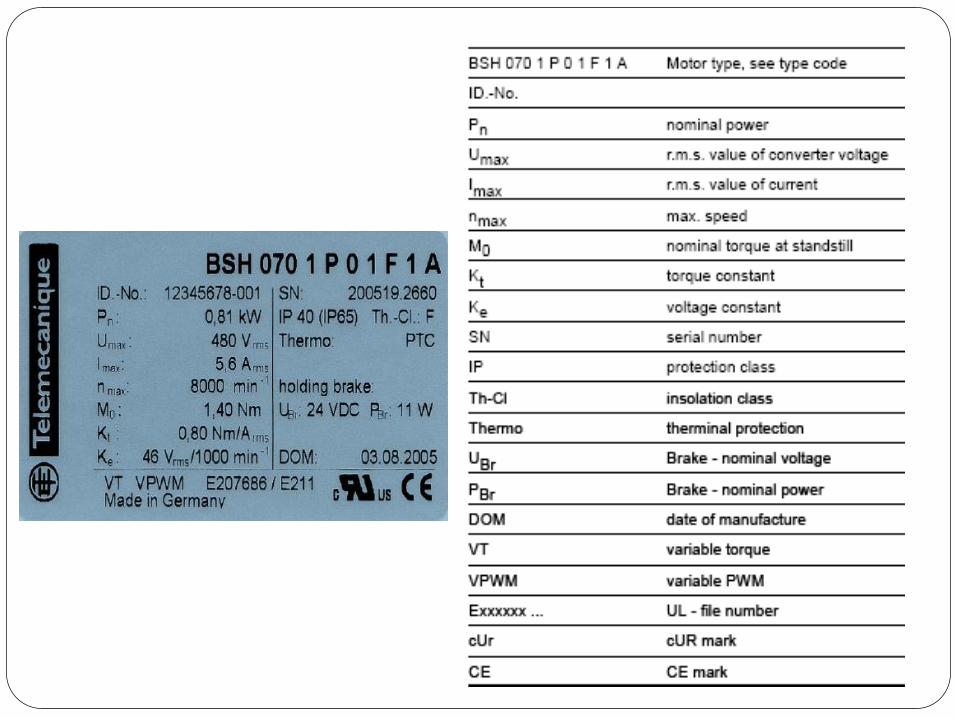
Placa de características del servomotor (Según modelo)
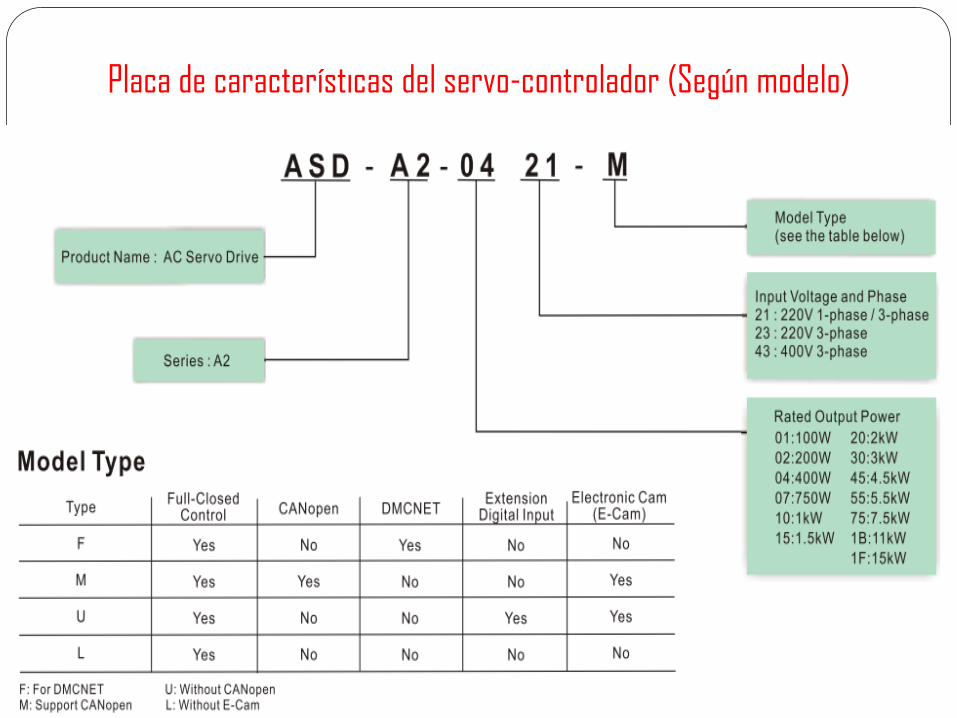
Placa de características del servo-controlador (Según modelo)
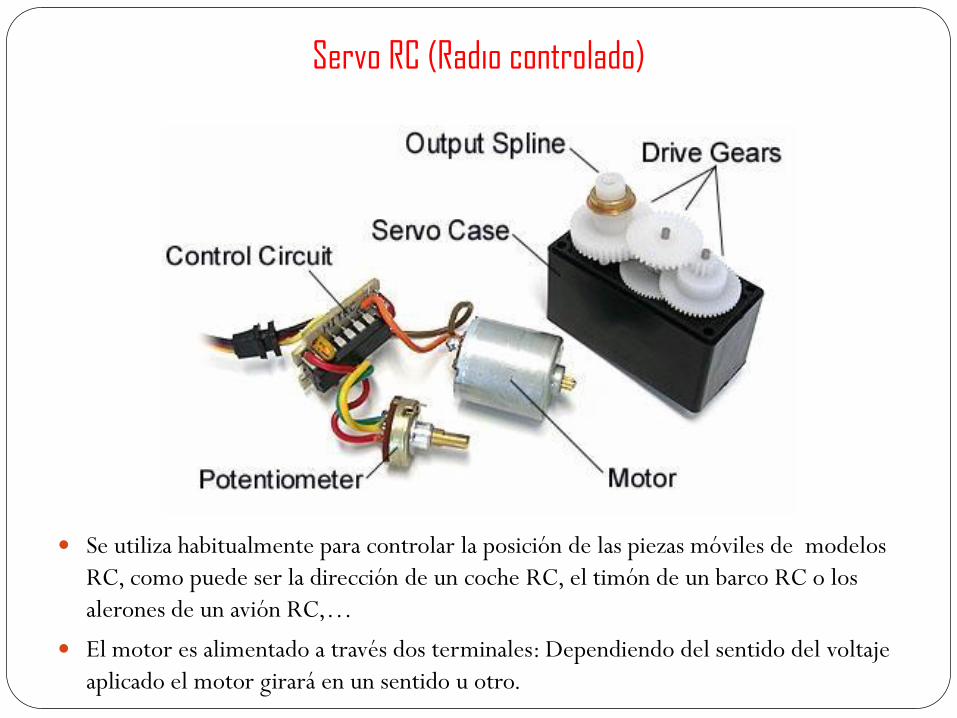
Servo RC (Radio controlado)
Se utiliza habitualmente para controlar la posición de las piezas móviles de modelos
RC, como puede ser la dirección de un coche RC, el timón de un barco RC o los
alerones de un avión RC,…
El motor es alimentado a través dos terminales: Dependiendo del sentido del voltaje
aplicado el motor girará en un sentido u otro.

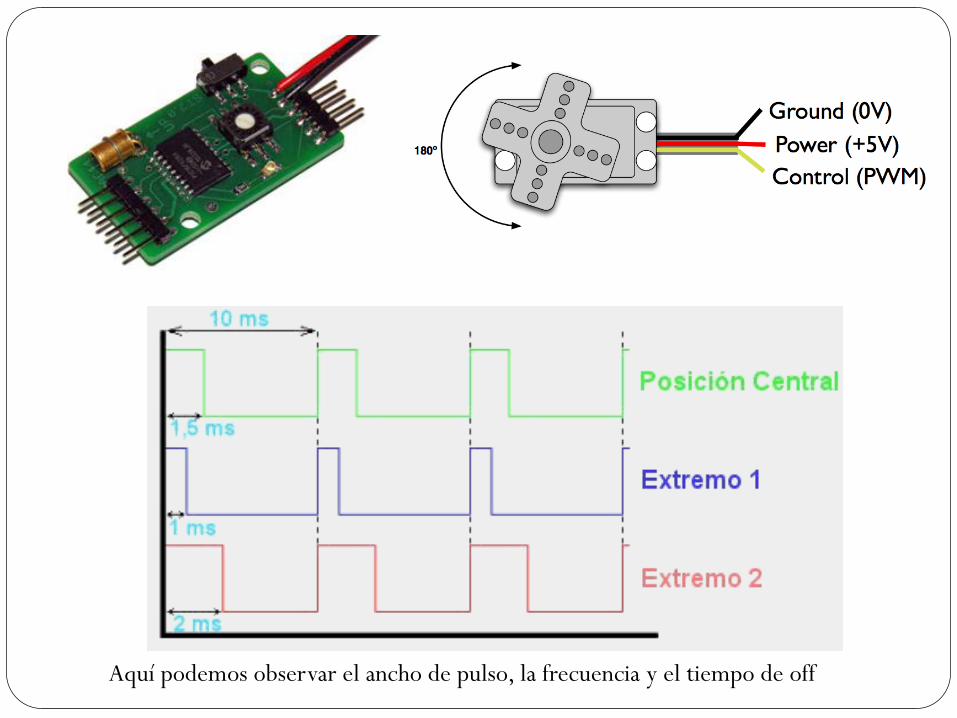
Aquí podemos observar el ancho de pulso, la frecuencia y el tiempo de off
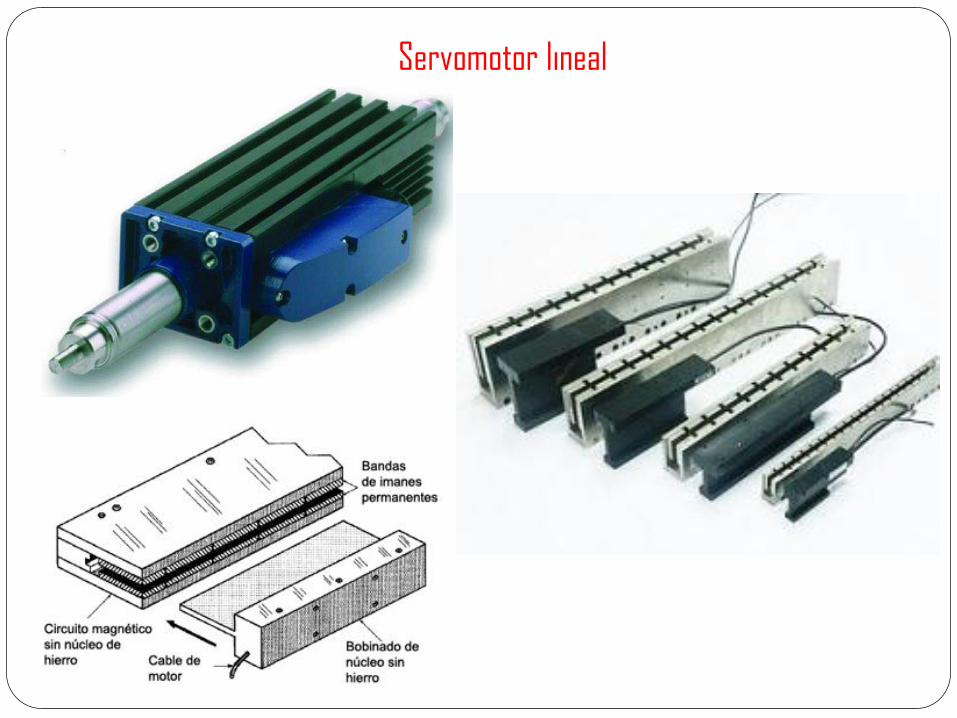
Servomotor lineal





























