Embed Size (px)
Citation preview
20/10/2016
1
Space Based Positioning (SBPS)
Introduction Positioning of any object on the surface of the earth can be determine
by spaced based positioning system(SBPS).SBPS receivers determine the position of any object existing on the surface of the Earth by
trilateration of microwave signals from satellite moving in the orbit of the earth at an altitude of 20200km.
It is important to note that the SBPS is the only fully functional global navigation satellite system. The satellite moving in orbits transmit
precise microwave signals and the system enables a SBPS receiver so as to determine its location ,speed, direction and time.
Definition of SBPS-Spaced based positioning systems(SBPS) technology is a fast and accurate method of determining the location of any point of internet anywhere on the face of earth of any time during the day
or night.

20/10/2016
2
SBPS System-GPS Space based Positioning System(SBPS) is Global invitation system . It
has been developed from our long search for Resolving the location related problems .From the pre-historic period when man was a
normal and hunter, he was interested in knowing his own location(lost in jungle!)and the next location he was to visit(Mai kaha hu? Kidar
jara ha hu?) From that period to the recent period , many systems for locating a part or a person, have been developed . Each one of the
system has its own limitations e.g. The star constellations with help of careful measurements, were used by the sailors in the deep, open
sea, but system could be used, during nights (with skies) only.
The modern persons use many new systems, with the help of the advent electronic equipment's. E.g. the Radio based system like LOREN, DECCA, They are used by the sailors, effectively near the coastal area. Where the LOREN and DECCA chains are available. These system do not cover the whole world. The accuracy also varies due to geographic variations.
With the introduction of satellites, a new satellite based navigation system has been evolved. It used low-altitude satellites or Inertial
Guidance systems which is known as TRNSIT. It consists of six satellites. They are polar orbit satellites at the altitude of 1100 km.
Who have formed the TRANSIT system(also known as SAT-NAV).
It is similar to the present day GPS. But as the satellites used by the SAT-NAV are in the low orbit, the are few in numbers and as are based on Low frequency Doppler measurements all of these have contributed to ERRORS to create in convenience.
SBPS provides a unique address to each and every square meters of the earth surface. This new facilities, provided by SBPS, has given the whole world a new standard for defining Locations and the distances.
This help the nations to monitor and use the natural disaster like Landslide earthquakes, flood affected areas general direction of the cyclones etc. This would help to generate preparedness to reduce the economic and ecological losses.

20/10/2016
3
SBPS System- Glonass,Galileo,Gagan and CompassThe existing and planned system are as follows- Space Based positioning system(SBPS)-GPS:
It is military system, fully operational since 1995. Glonass: It is Russian military system, fully operational since October 2011. Galileo: On 21st Oct. 2011, the first two of four operational satellites were
launched and the next two satellite will follow in 2012.Expected completion in 2019.
Beidou navigation system(COMPASS): It is a planned project in India. Indian Regional Navigation Satellite System:
It is planned project in India.
In SBPS system, there are specialized radio receivers to determine 3-D space position as well as time with an accuracy of 2-20 meters or tens of nanoseconds. Recently deployed systems use microwave signals which can only be received reliably outdoors and that covers most of earth’s surface and near earth space.
1. Glonass:
Glonass is Russian global Navigation satellite system, was a fully functional navigation consternation in 1995.
After the collapse of the Soviet Union, it fell into disrepair, leading to gaps in coverage and only partial availability. It has recovered and full operational and restored in 2011.
2. GALILEO: The European Union and European Space Agency agreed in March 2002
to introduce their own alternative to SBPS-GPS known as Galileo positioning system.
20/10/2016
4
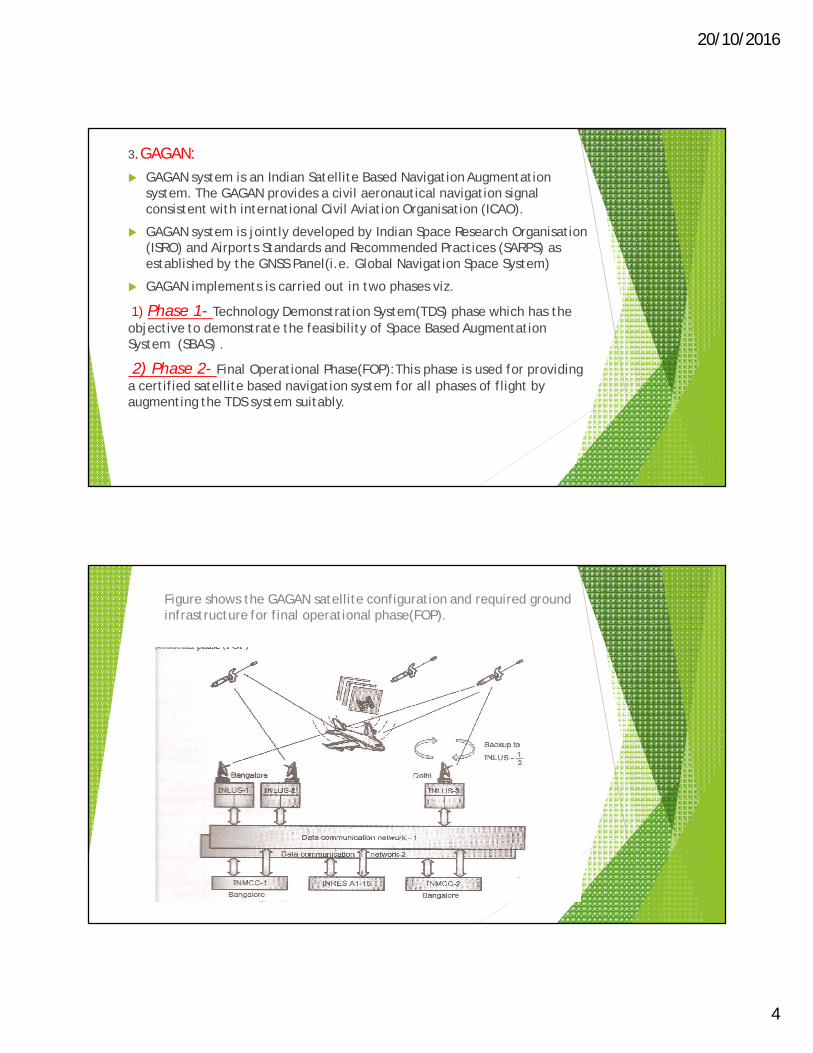
3.GAGAN: GAGAN system is an Indian Satellite Based Navigation Augmentation
system. The GAGAN provides a civil aeronautical navigation signal consistent with international Civil Aviation Organisation (ICAO).
GAGAN system is jointly developed by Indian Space Research Organisation(ISRO) and Airports Standards and Recommended Practices (SARPS) as established by the GNSS Panel(i.e. Global Navigation Space System)
GAGAN implements is carried out in two phases viz.
1) Phase 1- Technology Demonstration System(TDS) phase which has the objective to demonstrate the feasibility of Space Based Augmentation System (SBAS) .
2) Phase 2- Final Operational Phase(FOP):This phase is used for providing a certified satellite based navigation system for all phases of flight by augmenting the TDS system suitably.
Figure shows the GAGAN satellite configuration and required ground infrastructure for final operational phase(FOP).
20/10/2016
5
4. Compass or Beidou System: China fielded a demonstration regional satellite based navigation
system named as BeiDou. The initial regional BeiDouSystem(i.e.BeiDou-1) has been replaced by a global system named as BeiDou 2 and formly known as compass.
Compass include five GEO-Satellite;2.7 medium earth orbit (MEO) satellites, and five inclined geosynchronous orbit (IGSO) satellite. BeiDou-2, formerly name as Compass was declared operational for use in China and surrounding areas on December 27,2011.
Advantages of Space Based Positioning System
Following are the various advantages of Space Based Positioning system:
1. Line of sight is not required.
2. Indivisibly between station is not required.
3. It is independent of plumb line which is reference direction for almost all types of survey systems.
4. There is rapid speed work.
5. Digital output, computer compatible, easy to adjust, process and plot.
6. Angular or linear measurements are not required to reduce the position of the points.
7. It gives higher positional accuracies, even in order of sub-centimeter.
8. In any weather situations and conditions and at any time of a day, positions of the points on the ground or on water surface or in the air can be determine.
20/10/2016
6
Working System of GPS with SBPS:The basic principle of GPS are very simple. The GPS works on five fundamental concepts. These concepts are as follows:
a) This system is based on Triangulation from satellite.
b) For triangulation, the GPS receivers measure the distance, for which the travel time of the radio message from satellite is used.
c) It need to use a very high precision clocks, to measure the travel time (to measure the distance).
d) After the measurement of the distance the location of the satellite becomes important.
e) There is time lag the GPS signals travel through the ionoshere ( upper layer of the atmosphere above the stratosphere layer ) from transmitting the signal by satellite and receiving the same by the receiver.
Types of GPS
There the basic types of survey grade systems in GPS.
1) Single Frequency:This type of surveying with a single frequency system is called as
‘static mode.
2) Dual Frequency:Dual frequency systems only require post processing when operating in static or fast static.
20/10/2016
7
SBPS Application can be classified as follows:1) Surveying and mapping on land, at sea and from the air. The
applications are of relatively high accuracy, for positioning in both the stationary and moving media. It includes geophysical and resource survey, GIS data capture survey etc.
2) Land, sea air navigation, including enroute as well as precision navigations, cargo monitoring, vehicle tracking.
3) Search and rescue operations including collision avoidance.
4) Spacecraft operations.
5) Military applications.
6) Recreational uses, on land, at sea and in the air.
7) Other speacialized uses, such as time transfer, altitude determinations, automatic operations etc.
Applications of SBPS:Following are the applications of space based Positioning System (SBPS) widely used in any field of interest.1.Determining the boarders, making existing utilities like highway, municipal amenities photogrammetric and private site specific projects make then more dense or compact.2.GIS data acquisition.3.Monitoring,well,soil bring and other types of sampling locations.4.Estabilishing state plane coordinate or geodetic coordinates.5.Used in ‘As-built Survey and Topographic survey.6.Used for mine exploration.7.Used in baseline survey and traverse control survey or traverse verification surveys.8.Used in natural resource mapping.9.Used in communication tower survey and certifications.10.Used in construction stakes out utilities, highway, facilities, pilling etc.
20/10/2016
8
Method of Operation: There are four or more GPS satellite orbiting at an altitude of
20200km. By using signals from four or satellite , a typical GPS receiver calculates its position.
Process requires a very accurate local time which is more accurate than a clock, hence four satellite are needed and receiver solves for time as well position.
An atomic clock is provided in each GPS satellite. This clock continuously transmits messages, each containing the current time at the start of messages parameters so as to determine the location of the satellite and general system health.
Signals are travelled at a known speed of light is travelled through outer space and slightly travelled slower through atmosphere.
The receiver uses the arrival time to calculate the distance to each satellite from which it finds the position of the receiver using geometry and trigonometry.
If the local time is known very accurately, then trilateration process can find the position of receiver by using three satellite, but most of the receivers do not have clocks of accuracy.
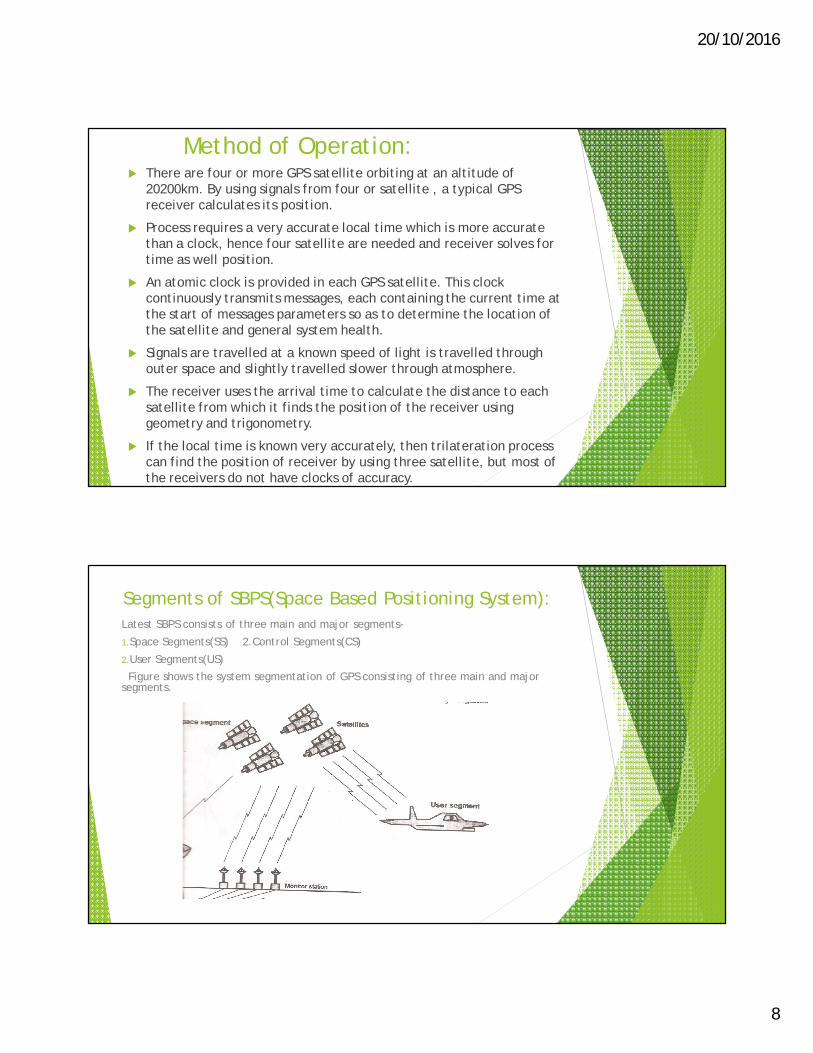
Segments of SBPS(Space Based Positioning System):Latest SBPS consists of three main and major segments-
1.Space Segments(SS) 2.Control Segments(CS)
2.User Segments(US)Figure shows the system segmentation of GPS consisting of three main and major
segments.
20/10/2016
9
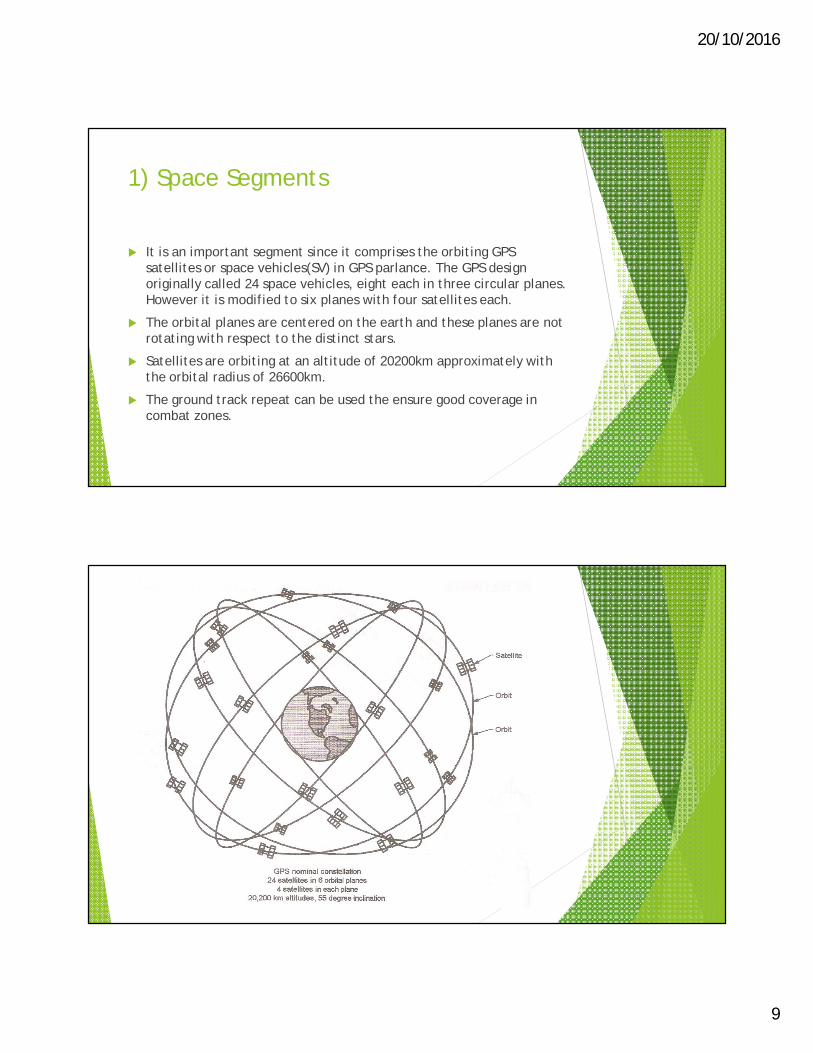
1) Space Segments
It is an important segment since it comprises the orbiting GPS satellites or space vehicles(SV) in GPS parlance. The GPS design originally called 24 space vehicles, eight each in three circular planes. However it is modified to six planes with four satellites each.
The orbital planes are centered on the earth and these planes are not rotating with respect to the distinct stars.
Satellites are orbiting at an altitude of 20200km approximately with the orbital radius of 26600km.
The ground track repeat can be used the ensure good coverage in combat zones.

20/10/2016
10
2)Control Segment The track of satellite is well decided and the flight paths of the
satellite are tracked by US air force monitoring the stations in Hawaii, Kwajalein, Ascension Island, Diego Garcia and Colorado along the monitor stations operated by the National Geospatial-Intelligence Agency(NGA).
The tracking information is sent to the air force space command’s master station at Schriever air force base in Colorado springs which is further operated by the two dimensional(2D) space operations squadron of the united state air force.
The updates are produced by Kalman filter which uses inputs from the ground monitoring stations, space weather and information and also the various other inputs.
3) User Segment This is the segment in which GPS receivers are made of an antenna
tuned to the frequencies transmitted by the satellites, receiver-processors and a highly-stable clock. It also provide location and speed information on display to the user. The number of channels signifies how may satellites the receiver can monitor simultaneously.
20/10/2016
11
Importance and Role of space segment, control segment and user segment in SBPS: Space segment: It generate and transmit code, carrier phases and
navigation messages. Here input is navigation message and output is P code C/A code, L1 and L2 which carries navigation message.
Control segment:1) It produces GPS time.
2) It predict ephemeris.
3) It manage space vehicle.
Users segment:1) It gives the navigation solution.
2) It also gives the surveying solution.
Here input is code observation, carrier phase observation and navigation message and output is position, velocity and time corrections such as delay due to ionospheric and tropospheric refraction clock errors etc are also computed and applied by users segments i.e. by users equipment or processing software.
Methods of Positioning with SBPS: The SBPS methods can be classified in two types:
a) Absolute positioning methods
b) Differential positioning methods
1) Absolute Positioning Methods:
Absolute positioning with SBPS is also termed as point positioning of GPS. It involves only one GPS receiver which simultaneously receives signals from at least 4 satellites so as to compute its own co-ordinates related to the centre of the earth. Absolute positioning is a code based technique.
Classification of Absolute positioning methods:1) Precise Positioning System(PPS)
2) Standard Positioning System(SPS)
1) Precise Positioning System(PPS):PPS receivers have the access to both the codes. PPS is used by military and authorized users and system is not affected by access denial techniques.
20/10/2016
12
2) Standard Positioning System
SPS is the service which is made available to the civil community. Only C/A code is available for SPS. The precision of SPS is about 50m.
Absolute or point positioning can be done in two modes viz. a) static mode and b) kinematic mode.
Static point positioning is used to find out the position of stationary objects in 3 dimensions, whereas the kinematic point positioning can be used in vehicle navigation so as to find out 3 dimensional trajectory of path traced by vehicle as function of time. Principles of absolute positioning is normally used for navigational receivers.
Differential positioning Methods: GPS is most advanced and accurate global navigation system, with all
the shortcomings it still can be made more accurate and can be improved by using the technique known as “Differential Positioning System”.
This technique is based on tracking the same satellite, by using two or more receivers at the same time. In this technique one of the receivers must be stationary, on a known coordinate, which is called as base station.
When the base station, receives the signals from the satellites, it compares its computed position with its known position and then calculate the “difference value”.
Except the error of multipath, this ‘value’ can reflect all the other measurement errors. So the common errors can be corrected in the nearby the GPS receivers.
Differential positioning of GPS can provide the accuracies required for basic land surveying as well as for hydrographic surveying.
20/10/2016
13
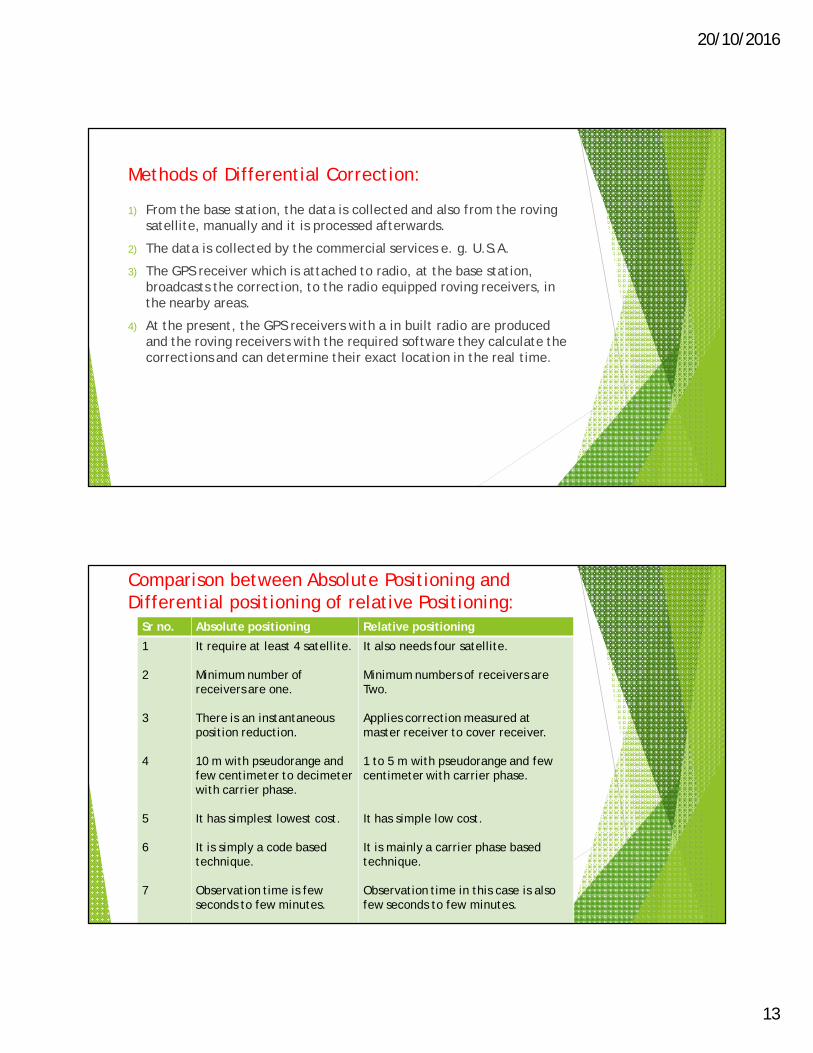
Methods of Differential Correction:
1) From the base station, the data is collected and also from the roving satellite, manually and it is processed afterwards.
2) The data is collected by the commercial services e. g. U.S.A.
3) The GPS receiver which is attached to radio, at the base station, broadcasts the correction, to the radio equipped roving receivers, in the nearby areas.
4) At the present, the GPS receivers with a in built radio are produced and the roving receivers with the required software they calculate the corrections and can determine their exact location in the real time.
Comparison between Absolute Positioning and Differential positioning of relative Positioning:
Sr no. Absolute positioning Relative positioning
1
2
3
4
5
6
7
It require at least 4 satellite.
Minimum number of receivers are one.
There is an instantaneous position reduction.
10 m with pseudorange and few centimeter to decimeter with carrier phase.
It has simplest lowest cost.
It is simply a code based technique.
Observation time is few seconds to few minutes.
It also needs four satellite.
Minimum numbers of receivers are Two.
Applies correction measured at master receiver to cover receiver.
1 to 5 m with pseudorange and few centimeter with carrier phase.
It has simple low cost.
It is mainly a carrier phase based technique.
Observation time in this case is also few seconds to few minutes.
20/10/2016
14
Factors Governing Accuracy in SBPS: Following are the various factors governing accuracy in GPS positioning.
1) Dilution Of Precision(DOP)
2) The ephemeris
3) The access denial technique
a) Dilution Of precision(DOP):
There is a direct effect of satellite geometry on positioning accuracies. When satellite has better spatial distribution in the sky, then the best single point positioning accuracies can be obtained.
The geometry of satellite contribute to the positioning accuracy is quantified by the number which is dimensionless, called as Dilution Of Precision.
2) The ephemeris: The position data about the satellite available in coded from in the signal
transmitted by the satellite is called as ephemeris. The satellite ephemerides are updates every hour and are valid for additional interval of time least half an hour.
Types of ephemeris:
A) Broadcast ephemeris:
B) Precise ephemeris:

20/10/2016
15
3) The access denial techniques: This type of techniques are built within the system of satellite
based positioning system to restrict the authorized users.
There are two technique s of access denial which are as follows:
1) The selective availability:
There are errors in satellite orbit, satellite clock, the ionosphere, troposphere, the multi-path and receiver. The amount of these error is typically less than 10m of range error.
Department of defense employed intentional error caused by man to degrade the position accuracy of GPS to about 100 meters.
2) Anti spoofing:
It is another technique of access denial, which is used to avoids enemy from transmitting false GPS signals. Anti spoofing technique encrypts the p code transmitted in y code.
Due to this, it is not possible for an enemy to transmit a signal and hence confusion or mis-direction to a friendly receiver can be prevented.
Use of SBPS in Surveying: Satellite Based positioning System(SBPS) surveying is independent of
weather and plumb line and inter-visibility points are not required. Therefore SBPS surveying requires the following technique:
1) Planning
2) Executing
3) Processing techniques
Static SBPS surveying is normally performed so as to establish first and third order geodetic survey control station.
Following are various steps preferably done in differential position GPS or an static GPS surveying:-

20/10/2016
16
1) Office work
2) Field reconnaissance
3) Monumentation
4) Finalizing observation window
5) Session
6) Organizational design
7) Field observations
8) Data transfer and data processing
1) Office Work:
Tentative position of proposed SBPS stations are marked on the topographical map of the area which is already available. Number of points are kept minimum as possible and these points are observed.
2)Field reconnaissance:
following points should be checked in the field reconnaissance it the interest of the station which are already marked and its number on topographical map of the area.
To avoid signal disturbances, any electrical installation should not be nearby the station mark.
To avoid satellite signal blockage; there should be the obstruction above the elevation of 20 degree.
3) Monumentation:The general term which is used to describe any object used to mark a
point, is called as monumentation . In such case, a steel rod is used to mark a photogrammetric control point and stone or concrete block are used to mark national geodetic control point.
4) Finalizing observation window:When the satellites not less 4 located properly well above the horizon can be observed at the same time, the the optimum window of SA (satellite Availability) is the period.
Satellite visibility can be represented by visibility diagram or sky plot.
5) Session:A session is define as the specific time period required for an observation.
The session is numbered by the day of observation and a serial number is given to the observation session over the day by an alphabet a, b, c, d and so on.
20/10/2016
17
6) Organization design: In organizational design; first of all crew is allocated a number
personnel and appropriate vehicle and survey equipment.
Organizational design depends on the type of network. Two basic GPS networks are required in organizational design.
Basic GPS networks:
1) Radial network configuration:
2) Closed geometrical figures:
7) Field Observations: Following procedure is adopted for taking the various observations at
the field a for each proposed survey stations.
1) Receiver antenna is setup at the proposed station. Height of antenna is then measured above the ground station.
2) calibration of receiver.
3) Activation of the receiver or initialization of the receiver.
4) taking out the GPS observation.
8) Data transfer and data processing: After carrying out the required observation for various control
station, next job is data transforming and processing which is carried out by using software provided by the manufacture of GPS system.
Sometimes, post processing of the data is essential to fix and remote the various kinds of the error as well as to carry out datum, co-ordinate and projection transformation.
20/10/2016
18
Application of SBPS in Establishing controls in various Fields:
It establish the zero order geodetic national survey control network of satellite based positioning system station.
It strengthen, density and readjust the existing network control station.
It connects the remote island to geodetic control network of main land.
It is useful to study the polar motion.
It is used to find the positioning of oceanic station in marine geodesy.
It is used in earthquake monitoring.
It is used for dereferencing of remotely sensed images.
It is used in control surveying.
SBPS Co- ordinates and Heights: The SBPS Co- ordinates:
Ellipsoidal earth models are required for accurate range and bearing calculations over long distance. Loran-C and GPS navigation receivers use ellipsoidal co-ordinates system or global datum based on “World Geodetic System of 1984” to compute position and waypoint information.
Following are the various ellipsoidal parameters of WGS 84 reference system:
1) Semi-minor axis= Polar axis=b
WGS-84 value of b=6356752.3142 meters
2) Semi-major axis=Equatorial radius=a
WGS-84 value of a=6378137 meters
3) Flattening=f=(a-b)/a
WGS-84 value of f =1/298.257223563
4) First eccentricity squared=e^2=2f-f^2
WGS-84 value of e^2=0.0066943799013
20/10/2016
19
Errors in SBPS Positioning:
Though SBPS is a highly advanced techniques used for collecting data for analyzing it and to converts the digital data into the satellite-image, which is very useful for resource management, environmental assessment and for disaster management. SBPS is a method which can pin-point the position of the calamities like landslides, floods .cyclones etc.
But with all these advantages it has to face a number of problems due to number of errors.
Following are the main types of errors in SBPS:
Types Sources of Errors in SBPS:
1) Orbital Error: Errors due to orbital data of satellite.
2) Errors due to reserves clock.3) Errors due to refraction in stratosphere( up to 80 km from the earth
surface) and in ionosphere( from 80 to 1000 kms above the earth surface).
4) Errors due to multipath interference. This is caused by the original signals from the object and the signals reflected from the objects.
Figure shows the errors caused by multipath interference.
20/10/2016
20
5) Errors in setup: like high measuring errors and entering errors.
6) Error in Geometric Dilution Of Precision (GDOP). It takes place due to weak geometric figure, which is the result of poorly located four satellite signal intersection (it can be optimize by using more than four satellites.) So, the final accuracy of the GPS is determined by summing of the source of error.
7) Atmospheric errors:
These are two types of atmospheric errors:
a) Ionosphere error
b) Tropospheric error
a) Ionosphere errors:Satellite based position system signals travel with a speed of light.
The upper layer of atmosphere termed as ionosphere containing charged particles which slow down the code and speed up the carrier. Range of ionospheric error is from 0.4 m to 5m . Error is low for satellite when elevation angle is 90 degree and high for satellite at the horizon when elevation angle is zero.
b) Troposphere errors:The lower part of the atmosphere consist of water vapour is termed as
troposphere. Due to tropospheric effect; code and carrier becomes slowing down. In such case the effect of slowing down the code and carrier cannot be removed by using two different frequencies system or dual frequency system.
8) Satellite clock errors:Satellite clock errors range is about 1.5 m. The errors and drifts of
the satellite clock are computed and added in the messages which are transmitted by the satellite.
9) Receiver error or receiver noise:Receiver can introduce some errors by itself in measuring code and carrier. Design of receiver and antenna can make influence on the receiver noise.
In such case, error in absolute or point positioning is 0.3 m and error in differential positioning is also 0.3m
20/10/2016
21
10) Receiver clock error:Receiver clock error can range up to few meters depending upon the
quality f the receiver clock. Clock error is estimated along with co-ordinates while positioning and hence do not affect the accuracies.
Thank You





























