Embed Size (px)
Citation preview

Possibilistic Activity Recognition in Smart Homes forCognitively Impaired People∗
Patrice C. Roya, Abdenour Bouzouaneb,Sylvain Girouxa and Bruno Bouchardb
aDomus Lab, Université de Sherbrooke, Canada{ patrice.c.roy, sylvain.giroux }@usherbrooke.ca
bLIARA Lab, Université du Québec à Chicoutimi, Canada{ abdenour.bouzouane, bruno.bouchard }@uqac.ca
Abbreviated title: Possibilistic Activity Recognition
Corresponding author:Patrice C. Roy
Laboratoire DomusUniversité de Sherbrooke2500 boul. de l’Université
Sherbrooke, QcCanada, J1K 2R1
∗This paper not been published elsewhere and has not been submitted simultaneously for publication elsewhere
1

Abstract
In order to maintain and improve the quality of life of people with dementia in their home,
we must elaborate assistive technologies that will alleviate the effects of the cognitive decline,
such as erroneous behaviours associated with carrying on activities of daily living (ADL).
Nevertheless, in order to provide adequate assistive services at the opportune moment, it is
necessary to recognize the occupant behaviour from sensor events of the smart home. To
address this challenge, this paper presents a formal model of activity recognition in smart
homes based on possibility theory and environmental contexts. This activity recognition
model is able to take into account coherent and erroneous behaviours, which may result
from the cognitive decline of the occupant. An implementation of this model was validated
in a smart home laboratory with real sensor data from coherent and erroneous realizations
of an ADL scenario.
1 Introduction
A major development in recent years is the importance given to research on ambient intelligence
in the context of recognition of activities of daily living. Ambient intelligence, in opposition to
traditional computing where the desktop computer is the archetype, consists of a new approach
based on the capacities of mobility and integration of digital systems in the physical environment,
in accordance with ubiquitous computing. This mobility and fusion are made possible by the
miniaturization and reduced power consumption of electronic components, the omnipresence
of wireless networks and the fall of production costs. This allows us to glimpse the opportune
composition of devices and services of all kinds on an infrastructure characterized by a granularity
and variable geometry, endowed with faculties of capture, action, treatment, communication and
interaction (Ramos et al., 2008).
One of these emerging infrastructures is the concept of smart home. To be considered as
intelligent, the proposed home must inevitably include techniques of activity recognition, which
can be considered as being the key to exploit ambient intelligence. Combining ambient assisted
living with techniques from activity recognition greatly increases its acceptance and makes it
more capable of providing a better quality of life in a non-intrusive way. Elderly people, with or
without disabilities, could clearly benefit from this new technology (Casas et al., 2008).
Activity recognition, often referred as plan recognition, aims to recognize the actions and goals
of one or more agents from observations on the environmental conditions. The plan recognition
problem has been an active research topic in artificial intelligence (Augusto and Nugent, 2006)
2

for a long time and still remains very challenging. The keyhole, adversarial or intended plan
recognition problem (Geib, 2007) is usually based on a logic or probabilistic reasoning for the
construction of hypotheses about the possible plans, and on a matching process linking the
observations with some activity models (plans) related to the application domain. Prior work has
been done to use sensors, like radio frequency identification (RFID) tags attached to household
objects (Philipose et al., 2004), to recognize the execution status of particular types of activities,
such as hand washing (Mihailidis et al., 2007), in order to provide assistive tasks like, for instance,
reminders about the activities of daily living (ADL).
However, most of this research has focused on probabilistic models such as Markovian models
and Bayesian networks. But there is some limitations with probability theory. Firstly, the belief
degree concerning an event is determined by the belief degree in the contrary event (additivity
axiom). Secondly, the classical probability theory (single distribution) cannot model (full or
partial) ignorance in a natural way (Dubois et al., 2007). An uniform probability distribution
on an event set better express randomness than ignorance, i.e. the equal chance of occurrence
of events. Ignorance represents the fact that, for an agent, each possible event’s occurrence is
equally plausible, since there is no evidence that is available to support any of them by the lack
of information. Hence, one of the solutions to this kind of problem is possibility theory (Dubois
and Prade, 1988), an uncertainty theory devoted to the handling of incomplete information.
In contrast with probability theory, the belief degree of an event is only weakly linked to
the belief degree of the contrary event. Also, the possibilistic encoding of knowledge can be
purely qualitative, whereas the probabilistic encoding is numerical and relies on the additivity
assumption. Thus, possibilistic reasoning, which is based on max and min operations, is compu-
tationally less difficult than probabilistic reasoning. Unlike probability theory, the estimation of
an agent’s belief about the occurrence of events is based on two set-functions. These functions
are the possibility and necessity (or certainty) measures. Finally, instead of using historical
sensors data like others probabilistic approaches, we use partial beliefs from human experts con-
cerning the smart home occupant’s behaviours, according to plausible environment’s contexts.
Since the recognition system can be deployed in different smart homes and that their environ-
ments are dynamics, it is more easier to obtain an approximation of the occupant’s behaviours
from human experts’ beliefs than learning the behaviours in different smart home’s settings. By
using general descriptions of environmental contexts, it is possible to keep the same possibility
distributions for different smart home’s settings. Consequently, another advantage of possibility
theory is that it is easier to capture partial belief concerning the activities’ realizations from
3

human experts, since this theory was initially meant to provide a graded semantics to natural
language statements (Zadeh, 1978).
In the DOMUS (Giroux et al., 2009) and LIARA (Bouchard et al., 2011) research labs,
we use possibility theory to address the problem of behaviour recognition, where the observed
behaviour could be associated to cognitive errors. These recognition results are used to identify
the various ways a smart home may help a cognitively impaired occupant at early-intermediate
stages to carry out his ADLs. This context increases the recognition complexity in such a
way that the presumption of the observed agent’s coherency, usually supposed in the literature,
cannot be reasonably maintained. We propose a formal framework for activity recognition
based on description logic and possibility theory, which transforms the recognition problem into
a possibilistic classification of activities. The possibility and necessity measures on behaviour
hypotheses allow us to capture the fact that, in some activities, erroneous behaviour is as possible
as normal behaviour. Hence, in a complete ignorance setting, both behaviour types are possible,
although each type is not necessarily the one being carried out.
The paper is organized as follows. Firstly, we present some background knowledge on people
with dementia (Alzheimer’s disease), on the plan recognition problem, and the possibility theory.
Secondly, we summarize some related works in activity recognition in a smart environment.
Thirdly, we introduce the possibilistic activity recognition model that we propose. Thereafter,
we presents the results of our implementation’s experimentation based on real data from the
AIHEC project at the Singapore’s Institute for Infocomm Research. Furthermore, this section
also presents a discussion of our results according to related recognition approaches. Finally, we
conclude the paper, mentioning future perspectives of this work.
2 Background
This section presents some background on people with dementia, the plan recognition problem,
and the possibility theory. An overall picture of Alzheimer’s disease is presented in order to
illustrate the issues related to cognitive decline.
2.1 Overall Picture of People with Dementia: Alzheimer’s disease
Alzheimer’s disease, or senile dementia of the Alzheimer’s type (SDAT), is a disease of the brain
characterized by progressive deterioration of intellectual abilities (cognitive skills and memory)
of the carrier (Diamond, 2006). This disease evolves slowly over a period of seven to ten years.
4
The capacity to carry out normal activities (reading, cooking, . . . ) decreases gradually, just like
the capacity to produce judgments and answers that are suitable to everyday life problems. The
intermediate stages of the disease constitute the longest portion of the degeneration process. The
main symptoms of these stages are related to planning problems caused by sporadic memory
losses, the weakening of the executive functions, and the attention decrease while performing
particular tasks. A distraction (e.g., a phone call, an unfamiliar sound, . . . ) or a memory
lapse can hinder the patient in accomplishing his activity, leading him to carry out the actions
attached to his activity in the wrong order, to skip some steps of his activity, or to carry out
actions that are not even related to his initial objectives (Patterson et al., 2002). However, the
patient’s capacity to perform a simple action (without many steps) remains relatively unaffected
(Reisberg et al., 1982).
In these intermediate stages, patients suffering from Alzheimer’s disease do not need to be
totally taken in charge. They need a supervision and a specific intervention on the part of an
assistant. When continuous support is provided to Alzheimer’s patients in the form of cognitive
assistance, the degeneration process of the disease is slowed down, making it possible for a patient
to remain at home longer (Boger et al., 2006). Hence, the development of an artificial agent
recognizer able to assist Alzheimer’s patients at an intermediate stage, when the situation require
it, would make it possible to decrease the workload carried by natural and professional caregivers.
This type of technology has the potential to delay the fateful moment of institutionalization of
patients by alleviating some caregiver duties and by giving a partial autonomy to patients. In
the longer term, it will also constitute an economically viable solution to the increasing cost
of home care services. Consequently, the research in this field will have important social and
economic impacts in the future.
When an Alzheimer’s patient performs a task requiring cognitive skills, it is possible that
inconsistencies become present in his behaviour (Pigot et al., 2003). In the plan recognition prob-
lem, the presence of these inconsistencies results in erroneous execution of activities (erroneous
plans), according to certain types of particular errors. In a real context, the people without such
impairment can also act in an inconsistent manner, but on a level less important and regular
than that of an Alzheimer’s patient. The main difference is that a healthy person is usually able
to recognize his behavioural errors and corrects them in order to achieve his initial goals. In
contrast, an Alzheimer’s patient will act incoherently, even while performing familiar tasks, and
his behaviour will become more inconsistent as the disease evolves. Also, we must consider that
hypotheses concerning the behaviour of the observed patient can fall into the scope of reactive
5

recognition (Rao, 1994). More precisely, a patient at an early stage is not necessarily making
errors; he can simply temporarily stop the execution of an activity plan to begin another one in
the middle of an activity realization. This way, the patient deviates from the activity originally
planned by carrying out multiple interleaved activities, in order to react to the dynamic of his
environment (Reisberg et al., 1982). This is coherent behaviour.
Starting from this point, if one wishes to establish an effective recognition model capable of
predicting any type of correct or incorrect behaviour, the confrontation of these two investiga-
tions, erroneous versus interleaved, constitutes a necessity that is in conformity with reality, but
which is also paradoxical. The detection of a new observed action, different from the expected
one, cannot be directly interpreted as an interruption of the plan in progress, in the objective of
pursuing a new goal. In fact, this action can be the result of an error on the part of a mentally
impaired patient, or a healthy but fallible human operator. However, this unexpected action is
not inevitably an error, even in the most extreme case where the patient is at an advanced stage
of his disease. This context raises a recognition dilemma that is primarily due to the problem of
completing the activity plan library, which of course cannot be complete in any domain. This
dilemma is important in a context of cognitive deficiency such as Alzheimer’s disease. A person
suffering from Alzheimer’s disease will tend to produce more errors, induced by his cognitive
deficit, than a healthy person when he carries out his activities of daily living. Like healthy
people, Alzheimer’s patients carry out activities in an interleaved way. Consequently, the con-
sideration of interleaved and erroneous realizations that could explain the current behaviour of
an Alzheimer’s patient is important.
2.2 Plan recognition
In the last two decades, the AI community produced many fundamental works addressing the
activity recognition problem, in order to infer the goals of an observed agent. This is often
referred as plan recognition (Carberry, 2001). The plan recognition problem could be defined
as to take as input a sequence of actions performed by an observed agent in order to infer the
goals pursued by the agent and to organize this action sequence in terms of a plan structure
(Schmidt et al., 1978). This plan structure explicitly organizes an action set that will allow the
observed agent to achieve it’s goals. While the observed agent carries out it’s goals by following
the plan structure, an observer agent tries to infer the plan and the associated goals. Since the
observer agent does not know the actual plan followed by the observed agent, it must therefore
make hypotheses concerning the composition of this plan structure from the actions carried out
6
by the observed agent. Those hypotheses could represent distinct goals. Therefore, the observed
agent must use the most plausible hypotheses in order to evaluate the possible plan structures
and the associated goals.
The plan recognition problem can be subdivided in three distinct categories (Geib, 2007):
keyhole, intended, and adversarial plan recognitions. This classification is based on the relation
that exists between the observed agent and the observer agent (Cohen et al., 1982). Also, this
classification is used to clarify the recognition context, which influences the recognition model’s
conception. In the keyhole plan recognition, it is presumed that the observed agent does not
know that it is observed and, therefore, it does not attempt to influence the recognition process or
to mislead the observer agent (Cohen et al., 1982). Thereby, the observed agent offers a neutral
cooperation, where it does not clarify or hide its intentions. In others words, the observed
agent carries out its activities without assisting or interfering with the recognition process. For
instance, the cognitive assistance context, where an occupant carries out his activities without
taking into account the fact that he is observed, corresponds well with this recognition category.
In the intended plan recognition, it is assumed that the observed agent knows that it is
observed and, consequently, it adapts its behaviour by carrying its activity in order to help the
recognition process (Kautz, 1987). Therefore, the observed agent offers a direct cooperation,
where it tries to explicit its intentions. Some approaches are based on this direct cooperation
assumption in order to propose recognition systems where, in uncertain situations, the observer
agent can directly request some clarifications about the on-going task to the observed agent
(Lesh et al., 1999). However, when we are in a cognitive assistance context, we cannot assume
of the collaboration capabilities of the occupant. Indeed, a clarification request could increase
the patient’s cognitive load, which must be avoided with people with dementia.
In the adversarial plan recognition, it is assumed that the observed agent is opposed to the
observation of its behaviour (Geib and Goldman, 2001). Therefore, the observed agent tries to
abort the recognition process by carrying out actions hiding its intentions (Mao and Gratch,
2004). Thus, the observed agent offers a negative cooperation, where it tries to hide its inten-
tions by all means. For the observed agent, the observer agent is an enemy and, therefore, the
observed agent deliberately tries to carry out actions that are inconsistent with its objectives.
Therefore, the observer agent infers erroneous conclusions concerning the observed agent be-
haviour. Adversarial recognition may be used in military contexts (Heinze et al., 1999) or in
video games (Albrecht et al., 1998). Nevertheless, adversarial recognition is inconsistent with
the objectives related to cognitive assistance. Hence, even if the occupant carries out irrelevant
7

actions with its intentions, these actions are principally caused from the dementia symptoms
that generate the erroneous behaviours. Consequently, the patient does not deliberately hinder
the recognition process. It should be noted that one important aspect for cognitive assistance is
the patient acceptation for this assistance service.
According to the keyhole plan recognition literature, the recognition approaches can be di-
vided into three major trends of research. The first one comprises works based on logical ap-
proaches (Christensen, 2002; Kautz, 1991), which consist of developing a theory, using first
order logic, for formalizing the recognition activity into a deduction or an abduction process.
The second trend of literature is related to probabilistic models (Albrecht et al., 1998; Charniak
and Goldman, 1993), which define plan recognition in terms of probabilistic reasoning, based
primarily on some Markovian models or on Bayesian networks. The third trend covers emerging
hybrid approaches (Avrahami-Zilberbrand and Kaminka, 2007; Geib and Goldman, 2005; Roy
et al., 2009) that try to combine the two previous avenues of research. It considers plan recog-
nition as the result of a probabilistic quantification on the hypotheses obtained from a symbolic
(qualitative) algorithm.
2.3 Possibility theory
The probability theory is inadequate to process imperfect information, which is imbued of uncer-
tainty and imprecision (Dubois and Prade, 2005). The possibility theory is an uncertainty theory
dedicated to process incomplete information (Dubois and Prade, 2003). Like probability theory,
this theory is based on set functions, but differs by using a pair of dual set functions (possibility
and necessity measures) instead of one. Furthermore, unlike probability theory where a disjoint
event set’s probability is given by summing each event’s probability, the possibility of such an
event set is given by taking the maximum value among the possibilities of each event in the set.
The main component of this theory is the possibility distribution. A possibility distribution
π on a state set S consists to a function from S into a totally ordered set (L, <), which could be
numerical or not. For instance, this ordered set may consist to the [0, 1] interval with maximum
and minimum operations and a reverse order function n, where n(0) = 1 and n(1) = 0. The
possibility function π represents the state of knowledge of an agent concerning the current state
of things, distinguishing what is plausible from what is less plausible (expected/unexpected).
A possibility distribution is often linked to a variable x in S (room temperature . . . ). Possible
values in x are mutually exclusive. For all s ∈ S, πx(s) = 0 indicates that x = s is rejected
(impossible), and πx(s) = 1 indicates that x = s is totally possible (plausible). Distinct values
8

can simultaneously have a possibility degree of 1. Furthermore, some values of πx(s) can be
between 0 and 1. Hence, πx(s) represents the possibility degree of the affectation x = s, where
some values s are more possible than others. If S is exhaustive, at least one member of S must
be totally possible as a value of x:
∃s ∈ S, πx(s) = 1 (normalization) .
Extreme cases of partial knowledge can be represented with the possibility theory. Firstly,
complete knowledge happens when some states are totally possible, while the others are impos-
sible:
∃s0 ∈ S πx(s0) = 1 and ∀s 6= s0 πx(s) = 0,
which indicates that the x = s0 assignations are the only ones that are possibles. Secondly,
complete ignorance happens when all states are totally possibles:
∀s ∈ S πx(s) = 1,
which indicates that all values in S are possibles.
Let’s suppose an event A, which is defined as a state subset A ⊆ S. If we want to evaluate the
result of request such as did the event A occurs ?, we must evaluate the partial belief induced
by the knowledge encoded by the possibility distribution. This is achieved by evaluating the
possibility Π(A) and necessity (or certainty) N(A) measures:
Π(A) = sups∈Aπ(s)
N(A) = n(Π(A)) = infs 6∈An(π(s)),
where n is a reverse order function on L. In this case, L = [0, 1] and n(e) = 1− e, where e is a
value in L (e ∈ L). Π(A) indicates to what extent A is consistent with π, while N(A) indicates
to what extent A is certainly implied by π. For a normalized possibility distribution, we have
Π(S) = 1 and Π(∅) = 0.
The possibility measure satisfies the maxitivity axiom:
Π(A ∪B) = max(Π(A),Π(B)),
9

while the necessity measure satisfies a dual axiom:
N(A ∩B) = min(N(A), N(B)) .
Thus, unlike the probability theory where a disjoint event set’s probability is given by summing
each event’s probability, the possibility of this event set is obtained from the maximum value
among the possibilities of each event in the set. Furthermore, in the probability theory, the
probability of an event completely determines the probability of the contrary event. This can be
seen as one of the main differences between possibility and probability. Indeed, the possibility
or necessity of an event and of its contrary event are but weakly linked. Furthermore, in order
to characterize the uncertainty of a particular event A, we need the Π(A) and N(A) values.
According to Dubois and Prade (1988), when modeling uncertain judgment (belief) from domain
expert, it is not desirable to rigidify the relationship between the indications one has in favor
of an event and those that weigh against it. In this situation, the notion of probability is less
flexible than that of possibility. For instance, the belief of an expert concerning a patient profile
is more easier to model with possibility than probability, since the expert knowledge (partial
belief) concerning the profile is incomplete and imperfect.
3 Related Work
Currently, there are many research groups working on assistive technologies that try to exploit
and enhance activity / plan recognition models, in order to concretely address the problems
related to cognitive support in a smart environment. Many proposed approaches use models
based on dynamic Bayesian networks or hidden Markov models, inheriting the advantages and
disadvantages of these models. The remainder of this section present a non-exhaustive list of
proposed approaches related to the context of cognitive assistance in a smart environment.
3.1 Autominder
The Autominder system (Pollack, 2005) is a planning assistant elaborated at the University of
Michigan. This system provides reminders about the daily activities of its user. It tracks the
behaviours of the user in order to reason about the need to provide reminders and when it is the
most appropriate to issue them. This system has been deployed in prototype form on a mobile
robot assistant, named Pearl, developed at the Carnegie Mellon University (Pineau et al., 2003).
The robot Pearl was developed to assist elderly individuals with mild cognitive and physical
10
impairments and to support nurse in their daily activities. The autominder system is divided in
three components: a plan manager, a client modeler, and a personal cognitive orthotic (Pollack
et al., 2003).
The plan manager stores the user’s ADL plans in the client plan and update it and identify
possible conflict in it. The client modeler tracks the execution of the plan given information
about user’s observable activities, and it stores its belief in the execution status in the client
model. The personal cognitive orthotic reasons about inconsistencies between what the user
is supposed to do and what he is currently doing, and determines when to issue reminders.
The caregiver initializes the system and is responsible to input a description of the person’s
daily activities, the constraints between them, and preferences about time and manner of their
performance. In order to take into account several kinds of temporal constraints, the user’s
plans are modeled as Disjunctive Temporal Problems (DTPs). The client manager uses sensor
information to infer activities performed by the user. If the likelihood that a planned activity
has been carried out is high, the client manager sends this information to the plan manager,
which updates the client plan by recording the time of execution and by propagating all the
affected constraints.
The client model is represented by a Quantitative Temporal Bayes Net (QTBN), which was
developed for the reasoning about fluents and probabilistic temporal constraints (Pollack et al.,
2003). A QTBN is composed of a dynamic Bayesian network (DBN) that contains all causal
relationships and a standard Bayesian network that represents all temporal relationships. The
personal cognitive orthotic uses the client plan and the client model to determine what reminders
should be issued and when. The generation of a reminder plan is considered as a satisfaction
problem and uses a local-search approach (planning-by-rewriting) in order to create a reminder
plan that minimizes the number of times where the system interrupts the user. This system is
able to take into account situation where the user performs multiple activities and to prompt
reminders when some erroneous behaviours occurs (mainly temporal related).
A clinical trial of the system with the robot Pearl has shown promising results by issuing
reminders for some assigned tasks (bring the patient to a planned meeting) (Pineau et al., 2003).
However, all the activities of the day must be inserted in the system when it is initialized. If the
patient must add a new activity or cancel a planned one in order to react to the environment,
the system will produce erroneous reminders for a period of time. The schedule of a day can
change greatly when an unexpected event occurs.
11
3.2 I.L.S.A.
The Independent LifeStyle Assistant (I.L.S.A.) (Haigh et al., 2006) is a monitoring and support
system for elderly people developed at the Honeywell Laboratories. The purpose of this system
is to allow to elderly people to live longer in their homes by reducing caregiver burden. The
I.L.S.A. concept consists to a multiagent system that incorporates different home automation
devices to detect and monitor activities and behaviour. It uses the Geib and Goldman (2005)
hybrid plan recognition model for its task-tracking component. The plan recognition is based
on probabilistic abductive reasoning to generate hypotheses concerning the person’s goals, while
taking into account observation loss uncertainty, when the system is unable to observe an action
because, for instance, of a hardware error. These inherent difficulties with the recognition of
low-level actions are not related to high-level behavioural errors, which occur when an observed
person carries out, in a erroneous way, an activity planned in advance.
The activity plan library is represented with a Hierarchical Task Network (HTN). There are
several methods to achieve possible goals related to an activity plan. Each method consists
of a set of primitive actions (which can be partially ordered) that a person must carry out to
achieve a specific goal. Also, this approach is centered around a model of plan execution, in
which the recognition system takes the intentions (plans) of an observed person at the start
of the recognition process. The set of plans (activities) determines the set of pending actions,
which represents all the actions that the observed person can carry out according to the partial
order of the selected plans. When the observed person carries out one of the pending actions, a
new set of pending actions is generated by removing the executed action and by adding the set
of newly enabled actions. An action is enabled when its predecessor is carried out. The set of
pending actions allows to consider the realization of multiple activities in a interleaved way. This
execution model is formalized with logical rules in the notation of Poole’s logic of probabilistic
Horn abduction (PHA) (Poole, 1993). After each observation, the probability of each hypothesis
(a plan selected) is evaluated. Also, for each action in the pending set, the probability that it
will be the next one executed is evaluated, in order to determine which action is executed when
the system is unable to recognize or to observe an action, due to a system error or to deficient
sensors.
There are some limitation with this approach. Firstly, the recognition agent must know all
the observed person’s intentions in order to be able to use the model of plan execution. In a real
context, the recognition agent does not know all the intentions precisely and hence must consider
all the plans from the library, augmenting the complexity of the recognition process. Secondly,
12

when the system is unable to observe an action, the system selects the most probable action that
could be executed from the pending set, which limits the system in a context where the observed
entity can carry out an activity in an erroneous way, in which some actions could be absent
from the pending set. Finally, this model considers that the observed person generally acts in
a coherent way, never making an error. The only exception is the case of goal abandonment,
which can be induced by coherent behaviour, such as a person that reacts to the dynamic of
his environment where a goal cannot be carried out, or by incoherent behaviour, such as an
Alzheimer’s patient that forgets what he is doing. A field study of the I.L.S.A. system was
made to complete an end-to-end proof-of-concept and consists mainly to monitor two ADLs
(medication and mobility) and to issue alerts and information to family caregivers. However,
the hybrid recognition component was removed from the I.L.S.A system field study because of
experimental code, scalability, and memory management issues and to reduce the deployment
cost induced by the size of the set of sensors.
3.3 MavHome
The MavHome (Managing an Adaptive Versatile Home) project (Cook et al., 2006) is a smart
home based on a multi-agents architecture, where each agent perceives its state through sensors
and acts, in a rational way, on the smart home environment, in order to maximize the inhabitants’
comfort and productivity. For instance, some devices can be automatically controlled according
to the behaviour prediction and the routine and repetitive task patterns (data mining) of the
inhabitant. The location prediction uses the Active Lezi algorithm, which is based on the LZ78
compression algorithm. It uses information theory’s principles to process historical information
sequences and thereby learn the inhabitant’s likely future positions. This algorithm has been
tested on synthetic and real data, with an accuracy of 64% and 55% respectively. By adding
temporal rules, based on Allen’s temporal logic, to this algorithm, the synthetic data set and
real data set prediction accuracies increase to 69% and 56% respectively (Jakkula and Cook,
2007).
The inhabitant action prediction is based on the SHIP (Smart Home Inhabitant Prediction)
algorithm, which considers the most recent sequence of actions (commands to devices issued by
the inhabitant) with those in the inhabitant’s history, in order to predict the inhabitant interac-
tions (commands to devices) with the smart home. The SHIP algorithm prediction accuracy on
real data set is 53.4%. The ED (Episode Discovery) algorithm, based on data mining techniques,
is used to identify significant episodes (set of related device events that can be partially/totally
13

ordered or not) that are present in the inhabitant history. Those episodic patterns allow them
to minimize the length of the input stream by using the minimum description length principle
(MDL), where each instance of a pattern is replaced with a pointer to the pattern definition. By
combining the Active Lezi and the ED algorithms, the prediction accuracy on the real data set
is improved by 14%. These results indicate the effectiveness of these algorithms in predicting
the inhabitant’s activities. Nevertheless, an algorithmic analysis in terms of response time is
indispensable, before more conclusions can be drawn.
3.4 Gator Tech
The Gator Tech Smart House developed by the University of Florida’s Mobile and Pervasive
Computing Laboratory (Helal et al., 2005) has been used to conduct several cutting-edge research
works aiming to create the technology, framework and systems that will make happen the concept
of assistive environments benefiting the growing elderly and disabled population around the
world. That research includes personal assistant, sensors, recognition systems, localization and
tracking technology, robotic technology, . . . . One of their recent projects, closely related to our
research on activity recognition, is on a health platform that monitors the activity, diet and
exercise compliance of diabetes patients (Helal et al., 2009). The activity recognition is based
on Hidden Markov Models (HMM), one for each task to recognize. By using the sensor data,
the activity recognition is able to quantitatively evaluate the completion status of an activity
and qualitatively evaluate the steps that are missing. By using real data from the CASAS smart
apartment at Washington State University (Szewcyzk et al., 2009), five tasks’ HMMs, trained
on those data, were able to achieve a recognition accuracy of 98% on this real data set. Another
validation where 20 participants carried out the 5 activities in a sequential way by deliberately
incorporating behaviour errors (steps that are missing or badly carried out) was able to detect
errors from 19 participants. 1 participant carried out in a coherent way the 5 activities.
However, this approach has some limitations. The 5 activities must be completed according to
a specific sequence. This sequence is relatively inflexible since the accomplishment of an activity
is necessary in order to carry out another one. Concerning error recognition, the errors are
deliberated, so that the usual routine is not respected (event sequence). Thus, environmental
modifications that change the configuration of the sensors could induce false behaviour error
recognitions. Also, a HMM that was trained from the sensor events of a smart home could be
inefficient in another smart home, since the sensors configuration is possibly different. These
limitations occur usually in approaches where the activity recognition is directly based on sensor
14
events, without intermediate steps (environment state / context recognition, low-level action
recognition . . . ).
3.5 Smart Environments Research Group (Ulster)
The Smart Environments Research Group at Ulster University (Chen et al., 2009) works on
different aspects of cognitive assistance in smart homes. In one recent project (Hong et al.,
2009), they proposed a solution to model and reason with uncertain sensor data with the aim
of predicting the activities of the monitored person. Their recognition approach is based on the
Dempster-Shafer (DS) theory of evidence (Shafer, 1976), an alternative theory for uncertainty
that bridges fuzzy logic and probabilistic reasoning and uses belief functions. The use of DS
allows them to fuse uncertain information detected from sensors for activities of daily living
(ADL), which are monitored within a smart home, by using an ordinal conditional function
and merging approaches to handle inconsistencies within knowledge from different sources. It
allows them to combine evidence from various sources and reach a degree of belief (represented
by a belief function) that takes into account all the available evidences. They use background
knowledge (such as a caregiver’s diary) to resolve any inconsistencies between the predicted
(recognized) action and actual activities. The strength of this recognition approach is that it
allows one to capture the fact that sensors provide only imprecise data and that some information
or sources are, a priori, more reliable than others. A validation was carried out on a real data
set (Hong and Nugent, 2011).
However, the weakness of approaches based on DS theory is that the complexity of combining
evidences is related to the number of focal elements used by the belief functions. In a smart
home context, the number of focal elements can be high, thus increasing the recognition process
complexity.
3.6 COACH
The COACH system (Cognitive Orthosis for Assisting aCtivities in the Home) (Mihailidis et al.,
2008) is a prototype aiming to actively monitor an Alzheimer’s patient attempting a specific
task, for instance the hand washing activity, and to offer assistance in the form of guidance
(prompts or reminders) when it is most appropriate. The assistance system is based on a
Partially Observable Markov Devision Process (POMDP) (Lovejoy, 1991). The POMDP is
able to estimate unobserved states, like the patient’s dementia level and responsiveness. From
observed state variables taken from a camera (hand position, water flow . . . ), the POMDP
15
evaluates the most likely world state, including the actual achievement state of the activity.
This state is used with a preevaluated policy in order to select the action that the COACH
system must carry out. A policy is a function specifying the action (state transition) that the
system must take when it is in a specific state. The chosen policy must maximise the reward
measure (limit the state transitions’ cost). For instance, if a problem happen, like an error or
the patient is confused, the system evaluates the most appropriate solution to achieve the task,
according to the POMDP activity model, and guides the patient in order to complete the task.
Experiments and clinical trials with the COACH system, including Alzheimer’s patients and
therapists, have shown very promising results in monitoring a single pre-established activity
(Hand Washing) and in providing adequate assistance at the right moment (Boger et al., 2006).
However, a major limitation of the prototype is presuming that the system already knows which
activity is in progress, and thus supposing that it can only have one on-going task at a time.
3.7 Barista
The Barista system (Patterson et al., 2007) is a fine-grained ADL recognition system that uses
object IDs to evaluate which activities are currently carried out. It uses Radio Frequency Iden-
tification (RFID) tags on objects and two RFID gloves that the user wears in order to recognize
activities in a smart home (Philipose et al., 2004). With object interactions detected with the
gloves, a probabilistic engine infers activities according to the probabilistic models of activi-
ties, which were created from, for instance, written recipes. The activities are represented as
sequences of activity stages. Each stage is composed of the objects involved, the probability
of their involvement, and, optionally, a time to completion modelled as a Gaussian probability
distribution. The activities are converted into Dynamic Bayesian Networks (DBN) by the prob-
abilistic engine. By using the current sub-activity as a hidden variable and the set of objects
seen and time elapsed as observed variables, the engine is able to probabilistically estimate the
activities from sensor data. The engine was also tested with hidden Markov models (HMM) in
order to evaluate the accuracy precision of activity recognition (Patterson et al., 2005). These
models were trained with a set of examples where an user performs a set of interleaved activ-
ities. However, some HMM models perform poorly, and the DBN model was able to identify
the specific on-going activity with a recognition accuracy higher than 80%. This approach is
able to identify the currently carried out ADL in a context where activities can be interleaved.
However, this approach does not take into account the erroneous realization of activities, because
the result of the activity recognition is the most plausible on-going ADLs.
16
4 Possibilistic Activity Recognition Model
This section presents our activity recognition model, which is based on possibility theory. In
this model, the activity recognition process can be separated into three agents: 1) environment
representation agent, 2) action recognition agent, and 3) behaviour recognition agent. According
to the Figure 1, describing the architecture of an activity recognition system in a smart home,
our approach is related to the three last layers.
The environment representation agent (layer 2) allows to describe the current state of the
smart home environment resulting from an action realization. This observed state, which can
be partial, is obtained from information retrieved from the smart home’s sensor events. From
this observed partial state, the environment representation layer is able to infer the plausible
contexts that could explain the current observations. It should be noted that our model assumes
that there is an event manager agent (layer 1) that collects sensor events and evaluates if an
action was carried out by the smart home’s occupant.
The action recognition agent (layer 3) infers the most plausible low-level action that was
carried out in the smart home according to the changes observed in the environment’s state.
In accordance with a possibilistic action formalization and to the set of plausible environment
contexts that could represent the observed environment’s state resulting from an action realiza-
tion, the action recognition agent selects in the action ontology the most possible and necessary
recognized action that could explain the environment changes.
The behaviour recognition agent (layer 4) infers hypotheses about the plausible high-level
occupant’s behaviour related to the accomplishment, in an erroneous or coherent way, of some
intended activities. When the smart home’s occupant performs some activities, its behaviour,
which could be coherent or erroneous, is observed as a sequence of actions. According to the
plausible sequence of observed actions and to a possibilistic activity plan formalization, the
behaviour recognition agent infers a behaviour hypothesis set and evaluates the most possible
and necessary hypotheses in order to send them to an assistive agent. Our approach assumes
that there is a smart home’s assistive agent that uses information from different agents, including
the behaviour recognition agent, in order to plan, if needed, a helping task, through some smart
home’s actuators, towards the smart home’s occupant.
4.1 Environment Representation and Context
In our model, knowledge concerning the resident’s environment is represented by using a formal-
ism in description logics (DL) (Baader et al., 2007). DL is a family of knowledge representation
17
formalisms that may be viewed as a subset of first-order logic, and its expressive power goes
beyond propositional logic, although reasoning is still decidable. By using the open world as-
sumption, it allows us to represent the fact that knowledge about the smart home environment’s
state is incomplete (partially observable). Smart home environment’s states are described with
terminological (concepts and roles) and assertional (concepts’ instances and relations between
them) axioms. DL assertions describing the environment’s state resulting from an action real-
ization are retrieved from information sent by an event manager, which is responsible to collect
sensor events and to infer if an action was carried out. The DL language used should be between
SHOIN (D) and ALC. The SHOIN (D) (Horrocks and Patel-Schneider, 2004) family consti-
tutes the foundation of the ontological language OWL DL (Horrocks et al., 2003). The ALC
family (Schmidt-Schauß and Smolka, 1991), a subset of SHOIN (D), is one of the most easier
to use. It should be noted that the implementation for the model validation uses the SH DL
(Horrocks and Sattler, 1999), which corresponds to ALC with the use of role transitivity and
role hierarchy.
In order to reduce the size of plausible states to consider for action and activity formalizations,
our approach use low-level environment’s contexts. Low-level contexts are related to the smart
home environment’s state and the occupant profile, while high-level contexts are related to the
occupant’s behaviour (intentions, carried out actions, current activities, behaviour type . . . ). For
the remainder of the paper, usage of the term context will mean low-level context. A context c is
defined as a set of environmental properties that are shared by some states s in the environment’s
state space S. More formally, a context c can be interpreted as a subset of the environment’s
state space (cI ⊆ S) 1, where states of this subset share some common environmental properties
described by the context assertions. For instance, the context where the occupant is in the
kitchen, the pantry door is open, and the pasta box is in the pantry can matches several possible
states of the smart home environment. It is possible to partition the environment’s state space
with a set of contexts. Since the observation of the current state is partial, it is possible to have
multiple contexts that could explain the current observed state. Thus, our approach must infer,
by using a reasoning system, the plausible contexts that can be satisfied by the current observed
state’s assertions.
A context ontology (C,vC) describes the set of all environment’s contexts C, which is partially
ordered with the context subsumption relation vC . The context subsumption relation vC can
be seen as an extension of the concept subsumption relation v of DL (Baader et al., 2007). This1·I is an interpretation function that assigns to a context C a subset of the interpretation domain ∆I = S
(the interpretation of c corresponds to a nonempty set of states).
18

order relation, which is transitive, allows us to indicate that a concept is more general than
(subsumes) another concept. In other words, a subsumed concept is a subset of the subsumer
concept. For instance, c vC d means that the context d is more general than the context c. In
others words, the environment states associated to the context c (cI) are included in the states
associated to the context d (dI), so that cI ⊆ dI . For instance, a context where a door is open
is more general than a context where the pantry door is open (concept pantry door subsumed
by the concept door).
4.2 Action Recognition
In order to infer hypotheses about the observed behaviour of the occupant when he carries out
some activities in the smart home environment, we need to recognize the sequence of observed
actions that were performed in order to achieve the activities’ goals. In our model, we formalize
action according to a context-transition model where transitions between contexts resulting from
an action realization are quantified with a possibility value.
Proposition 1 (Possibilistic Action). A possibilistic action a is a tuple (Cprea, Cposta
, πinita,
πtransa), where Cprea and Cposta are context sets and πinita and πtransa are possibility distribu-
tions on those context sets.
Cprea is the set of possible contexts before the action occurs (pre-action contexts), Cposta is
the set of possible contexts after the action occurs (post-action contexts), πinitais the possibility
distribution on Cpreathat an environment’s state in a particular context ci ∈ Cprea
allows the
action to occur, and πtransa is the transition possibility distribution on Cprea × Cposta if the
action does occur.
The action library, which contains the set of possible actions A that can be carried out by
the occupant, is represented with an action ontology (A, vA), where each action is partially
ordered according to an action subsumption relation vA.
Proposition 2 (Action subsumption relation). Let a, b ∈ A be two actions, represented by
(Cprea, Cposta
, πinita, πtransa
) and (Cpreb, Cpostb
, πinitb, πtransb
), and let vA⊆ A × A be the
action subsumption relation. If a subsumes b, represented by b vA a or vA (b, a) ((b, a) ∈vA),
then we have:
1. ∀d ∈ Cpreb, ∃c ∈ Cprea , d vC c ∧ πinitb
(d) 6 πinita(c),
2. and ∀(d, e) ∈ Cpreb× Cpostb
, ∃(c, f) ∈ Cprea× Cposta
, d vC c ∧ e vC f ∧ πtransb(d, e) 6
πtransa(c, f).
19

In others words, according to the action subsumption relation vA, if an action subsumes
another one, its possibility values are at least as possible as the action subsumed. For instance,
since OpenDoor subsumes OpenDoorPantry, then the OpenDoor possibility is greater or equal
than the OpenDoorPantry possibility, since OpenDoor is more general than OpenDoorPantry.
This action ontology is used when we need to evaluate the most plausible action that could
explain the changes observed in the smart home environment resulting from an action realization
by an observed occupant. At the same time, we evaluate the next most plausible action that
can be carried out according to the current state of the smart home environment.
In order to evaluate the recognition and prediction possibilities on the action ontology at a
time t, we need to use the observation obst of the current environment state, represented by a set
of DL assertions. This observed state can be partial or complete according to the information
that can be retrieved from the environment’s sensors. Furthermore, each observation timestamp
t ∈ Ts is associated with a time value ti ∈ T that indicates the elapsed time (in minutes,
seconds, . . . ) since the start of the recognition process. This observation obst allows to evaluate
the set of plausible contexts ci that are entailed by this observation (obst |= ci). If we suppose
that obst is an observed context, then we have ci vC obst for each context ci that is entailed
by the observation (obst |= ci). Since the environment can be partially observable, multiple
entailed contexts are possible. Those entailed contexts are then used to evaluate the possibility
distributions for the prediction and recognition of actions.
The action prediction possibility distribution πpret on A indicates, for each action, the pos-
sibility that the action could be the next one carried out according to the current state observed
by obst. Thus, for each action a ∈ A, the prediction possibility πpret(a) is obtained by select-
ing the maximum value among the initiation possibilities πinita(ci) for the pre-action contexts
ci ∈ Cpreathat are entailed by the current observation (obst |= ci). The action recognition
possibility distribution πrecton A indicates, for each action, the possibility that the action was
carried out according to the previous and currents states observed by obst−1 and obst. Thus,
for each action a ∈ A, the recognition possibility πrect(a) is obtained selecting the maximum
value among the transition possibilities πtransa(ci, cj) for the pre-action contexts ci ∈ Cprea
and post-action contexts cj ∈ Cposta that are entailed by the previous and current observations
(obst−1 |= ci and obst |= cj).
With this action recognition possibility distribution πrect, we can evaluate the possibility
and necessity measures that an action was observed at a time t. The possibility that an action
in Act ⊆ A was observed by obst, denoted by Πrect(Act), is given by selecting the maximum
20

possibility among the actions in Act (πrect(a), a ∈ Act).
Πrect(Act) = max
a∈Act
(πrect
(a))
.
The necessity that an action in Act ⊆ A was observed by obst, denoted by Nrect(Act), is given
by selecting the maximum value in πrect and to subtract the maximum possibility among the
actions not in Act (πrect(a), a /∈ Act).
Nrect(Act) = max
b∈A
(πrect
(b))−Πrect
(Act),
= minc/∈Act
(maxb∈A
(πrect
(b))− πrect
(c)),
= maxb∈A
(πrect
(b))− max
c/∈Act
(πrect
(c))
.
It should be noted that the prediction possibility and necessity measures Πpretand Npret
are
obtained by using the prediction possibility distribution πpret instead of the recognition possibil-
ity distribution πrect. According to those possibility and necessity measures (Πrect
and Nrect),
the most plausible action a that could explain the changes observed in the environment state
described by obst, is selected in A. If more than one action is plausible, then they have the same
possibility value and the necessity measure is null for each of these actions if taken individually.
In this case, the most plausible action is taken in A according to the plausible action set Act
and the subsumption relation vA. This selection is carried out in the following way:
1. select the most specific actions K ⊆ Act among the plausible actions Act ⊆ A, so that
∀a ∈ K, @b ∈ Act, a 6= b ∧ b vA a,
2. select the actions M ⊆ A among all actions A that subsume all actions in K, so that
∀c ∈ M , ∀d ∈ K, d vA c,
3. select the most specific actions N ⊆ M among the actions in M , so that ∀e ∈ N , @f ∈ M ,
e 6= f ∧ f vA e,
4. if |N | ≥ 2, then we go to the third step by subtracting the action set N from the action
set M . Else, we select a ∈ N as the observed action, where a is the only action in N .
The observed action selection process is illustrated in Figure 2.
This example presents a subset of the action ontology (nodes) partially ordered by the sub-
sumption relation (arcs). The dark nodes are the most plausible actions, delimited by Act (full
line), that are the most possible and certain. The most specific actions in Act, delimited by K
21

(dashed line), represent plausible actions that are carried out in more precise contexts. From the
specific actions K, we must find among all actions in A the most specific action that generalizes
(subsumes) all actions in K. This action is selected among the actions that subsume all actions
in K. These actions are delimited by M (dotted line). The most specific action in M , which is
delimited by N (square), is selected as the most plausible observed action that was carried out
by the occupant. Since |N | = 1, the selection process is completed.
For instance, if the most plausible actions in Act are AnyAction, OpenTap, OpenColdTap
and OpenHotTap, then OpenTap is selected since it is the most specific common subsumer of
OpenColdTap and OpenHotTap, which are the most specific actions in Act. It should be noted
that the Act subset is chosen in order to maximize the possibility measure, while the necessity
measure is maximized according to a fixed value or a ratio with the possibility measure. This
fixed value for the necessity measure is to prevent as much as possible the situation where
Act = A.
This new observed action (a, t) is sent to the behaviour recognition agent, which uses the
sequence of observed actions to infer behaviour hypotheses concerning the realization of the
occupant’s activities. This sequence of actions represents the observed plan Pobst, and consists
to a set of observed actions (ai, tj) totally ordered by the sequence relation ≺T . For instance,
let obs0 and obs1 be two observations where the time values associated to the timestamps 0
and 1 are 3 minutes and 4 minutes, respectively. Then the observed plan (OpenDoor, 0) ≺T
(EnterKitchen, 1) indicates that OpenDoor was observed, according to obs0, 3 minutes after
the start of the recognition process and that EnterKitchen was then observed, according to
obs1, 1 minute later. This observed plan will be used by the behaviour recognition agent to
generate a set of hypotheses concerning the occupant’s observed behaviour when he carries out
some activities.
4.3 Action Recognition Process Overview
In order to illustrate the action recognition process step by step, let’s suppose a fictive smart home
where the only occupant is Peter. While carrying out his ADL in the smart home, Peter realizes
an action at time t. The action’s effects produce changes in the smart home environment’s state,
which are perceived by sensors disseminated in the smart home. According to the sensor events,
the only information about the currently observed state is that Peter is located in the kitchen
and a door is open. This resulting state from the action realization is described by obst with
DL assertions. There are multiple environment states that can be described by this observation
22

obst. For instance, the state where Peter is in the kitchen and the pantry door is open and the
state where Peter is in the kitchen and the refrigerator door is open represent two possible states
according to the observed situation described by obst. Consequently, the first step of the action
recognition process is to evaluate the environment contexts among the context ontology C that
are entailed by this observation obst.
From the identified plausible contexts, the action recognition process evaluates the action
that Peter carried out and the next plausible action that Pater will carry out. This evaluation
is based on the action ontology and Peter profile, which are specified by a domain expert. The
action ontology allows to define all possible actions that Peter could carry out in the smart home
and the hierarchy between them (action subsumption relation). The profile allows to define, for
each action, the initiation and transition possibility distributions on the contexts associated to
the action, while respecting constraints related to the hierarchy defined in the action ontology.
Thus, each action a ∈ A is described a 4-tuple (Cprea, Cposta
, πinita, πtransa
). Concerning the
action prediction, the process evaluates the possibility distribution πpret , which indicates the
possibility πpret(a) that an action a is the next one carried out by Peter according to the pre-
action contexts Cpreaentailed by the observation obst. From this prediction distribution πpret
,
we select the most plausible actions (Act) that maximize the necessity measure according to
a fixed value. If we assume that Act = {AnyAction, TakeFood, TakeCookie, TakePasta},
the predicted action is TakeFood, since it subsumes the most specific actions (TakeCookie
and TakePasta) and is more specific than the generic action AnyAction. Thus the plausible
predicted action that Peter will carry out is the action TakeFood where Peter takes some foods
(cookie or pasta) from the pantry.
Concerning the action recognition, the process evaluates the recognition possibility distri-
bution πrect, which indicate the possibility πrect
(a) that an action a is the action that Peter
carried out according to the plausible transitions between the pre-action contexts Cprea entailed
by obst−1 and the post-action contexts Cpostaentailed by obst. From the recognition distribution
πrect, the recognition process selects the most plausible observed action Act. If we assume that
obst−1 describes an environment state where Peter is in the kitchen and the pantry and refriger-
ator doors are closed, Act is then composed of {AnyAction, OpenDoor, OpenDoorInKitchen,
OpenPantryDoor, OpenRefrigeratorDoor}. Thus, the most plausible observed action is Open-
DoorInKitchen, since it subsumes the most specific actions OpenPantryDoor and Open-
RefrigeratorDoor and is more specific than the actions AnyAction and OpenDoor. Hence,
the plausible observed action that Peter carried out is OpenDoorInKitchen where Peter opens
23
a door (pantry or refrigerator) in the kitchen. This plausible observed action is then added to
the observed plan, which consists to a sequence of the most plausible observed actions.
Table 1 illustrates the evaluation process for the prediction and recognition possibility and
necessity measures. It should be noted that the action AnyAction is omitted, since it subsumes
all actions in A. Furthermore, only a subset of the action ontology is showed.
According to the observations, the prediction and recognition possibility distributions πpret
and πrecton the action ontology A are evaluated. Concerning the prediction, the most plausible
predicted actions in Act are AnyAction, TakeFood, TakeCookie and TakePasta. This set Act
contains actions with one of the three highest values in the possibility distribution πpret (0.9, 0.8
and 0.7). This allows to increase the prediction necessity measure, while minimizing the number
of actions to take into account. According the action ontology and the action subsumption
relation, the most plausible predicted action is TakeFood. According to πpret , the fact that
Peter will carry out the action TakeFood is very possible (Πpret(Act) = 0.9) and fairly certain
(Npret(Act) = 0.7). Thus, we have a prediction plausibility interval [0.9, 0.7] for the action
TakeFood.
Concerning the recognition, the most plausible observed actions in Act are AnyAction,
OpenDoor, OpenDoorInKitchen, OpenPantryDoor and OpenRefrigeratorDoor. This set
Act contains actions with one of the three highest values in the possibility distribution πrect
(0.8, 0.7 and 0.6). Since there is no action with a possibility value of 0.6, only actions with
values at 0.8 and 0.7 are taken into account. According to the action ontology and action sub-
sumption relation, the most plausible observed action is OpenDoorInKitchen. In accordance
with πrect, the fact that Peter carried out the action OpenDoorInKitchen is very possible
(Πrect(Act) = 0.8) and relatively certain (Nrect(Act) = 0.6).
The predicted and observed actions, including the prediction and recognition possibility
distributions, are then sent to the behaviour recognition process. This behaviour recognition
process will generate hypotheses concerning Peter’s observed behaviour when he carries out his
activities of daily living.
4.4 Behaviour Recognition
In order to have hypotheses about the behaviour associated with the performance of some
activities, we need to formalize activities as plan structures by using the action ontology A.
An activity plan consists of a partially ordered sequence of actions that must be carried out in
order to achieve the activity’s goals.
24
Proposition 3 (Activity Plan). An activity plan α is a tuple (Aα, ≺α, Crealα , πrealα , πerrα)
where Aα ⊆ A is the activity’s set of actions, which is partially ordered by a temporal relation
≺α⊆ Aα×Aα×πtimeα where πtimeα represents a set of temporal possibility distributions πtimeα,k,
Crealα is the set of possible contexts related to the activity realization, πrealα is the possibility
distribution on Crealα that a context is related to a coherent realization of the activity, and πerrα
is the possibility distribution on Crealα that a context is related to an erroneous realization of
the activity.
Each relation (ai, aj , πtimeα,k) ∈≺α allows us to describe the possible delays, according to the
temporal distribution πtimeα,k, between the carrying out of ai and aj . The temporal distribution
πtimeα,kon T , which is a set of time values, indicates for each time value tl ∈ T , the possibility
πtimeα,k(tl) that tl represents a coherent delay between the realization of ai and aj . For in-
stance, the activity WatchTv can have an activity plan composed of the actions SitOnCouch,
TurnOnTv and TurnOffTv and the temporal relations (SitOnCouch, TurnOnTv, πtime0) and
(TurnOnTv, TurnOffTv, πtime1), where πtime0 and πtime1 indicates possible delays between
the realization of the actions, according to Figure 3.
The activity plan library, which contains the set of possible activity plans P that can be
carried out by the occupant in the smart home environment, is represented with an activity
plan ontology (P, vP), where each activity plan is partially ordered according to an activity
subsumption relation vP .
Proposition 4 (Activity Subsumption). Let two activity plans α, β ∈ P, represented by tuples
(Aα, ≺α, Crealα , πrealα , πerrα) and (Aβ , ≺β , Crealβ , πrealβ , πerrβ), and the activity subsumption
relation vP ⊆ P × P. If α subsumes β, denoted by β vP α, then we have: for each context
d ∈ Crealβ , there is a context c ∈ Crealα where d vC c, πrealβ (d) 6 πrealα(c), and πerrβ(d) 6
πerrα(c).
In other words, if an activity subsumes another one, its possibility values are at least as
possible than the activity subsumed. For instance, since CookFood subsumes CookPastaDish,
then the CookFood possibility is greater or equal than the CookPastaDish possibility, since
CookFood is more general than CookPastaDish.
After each observation obst, we need to evaluate the possibility distributions πrealt and πerrt
on the activity plan ontology P, which indicates the possibility that the environment’s state
observed by obst is related, respectively, to a coherent realization and an erroneous realization
of the activity. The coherent activity realization possibility distribution πrealt on P indicates
the possibility, denoted by πrealt(α) that the environment’s state observed by obst is related to
25

a coherent realization of the activity plan α ∈ P. Hence, πrealt is obtained by selecting, for
each activity plan α ∈ P, the maximum value among the context possibilities πrealα(ci) for the
contexts ci ∈ Crealα that are entailed by the observation (obst |= ci).
The erroneous activity realization possibility distribution πerrton P indicates the possibility,
denoted by πerrt(α) that the environment’s state observed by obst is related to an erroneous
realization of the activity plan α ∈ P. Thus, πerrt is obtained by selecting, for each activity plan
α ∈ P, the maximum value among the context possibilities πerrα(ci) for the contexts ci ∈ Crealα
that are entailed by the observation (obst |= ci).
By using the activity plan ontology and the observed plan, the behaviour recognition agent
can generate hypotheses concerning the actual behaviour of the observed patient when he carries
out some activities. Since multiple activity realizations can explain the observed plan, we need
to evaluate activity realization paths, which represent partial/complete realizations of activities.
An activity realization path pathj is a tuple (αj , Pobst, Rpathj
), where αj ∈ P is the activity that
is partially or completely carried out, Pobst is the observed plan, and Rpathj ⊆ Pobst ×Aαj is a
relation which associates a subset of observed actions (ai, tk) ∈ Pobstfrom the observed plan to
actions al ∈ Aαjfrom the activity αj , so that ((ai, tk), αl) ∈ Rpathj
. The observed actions in
Rpathj must represent a coherent partial or complete realization of the activity αj , according to
the temporal constraints defined in the activity plan αj . It should be noted that if an observed
action (ai, tk) is associated with an activity action al, denoted by ((ai, tk), al) ∈ Rpathj, then
the observed action must subsume the activity action (al vA ai). For instance, given the
observed plan (SitOnCouch, 0) ≺T (TurnOnElectricalAppliance, 1) and the WatchTv activity
plan, we can have as realization path the associations ((SitOnCouch, 0), SitOnCouch) and
((TurnOnElectricalAppliance, 1), TurnOnTv) (since TurnOnTv is subsumed by TurnOn-
ElectricalAppliance).
Figure 4 illustrates the concept of a partial activity realization path. From a sequence of ob-
served actions (observed plan), some actions (a0, a2, a3 and a5) are associated to actions in an ac-
tivity plan (a vA a0, b vA a2, c vA a3 and d vA a5), where actions a to h are partially ordered.
Thus we have an activity realization path {((a0, t0), a), ((a2, t2), b), ((a3, t3), c), ((a5, t5), d)}
which denote a partial coherent realization of the activity plan. The remaining observed actions
(a1, a4 and a6) may be associated to another activity plan or be a behavioural error.
Since the set of realization paths Path depends on the observed plan Pobst , we must update
Path for each new observed action by extending, removing, or adding new realization paths:
(i) a realization path pathj ∈ Path is extended if the new observed action subsumes one of the
26

next possible actions in the activity plan and if the extended path respects the constraints in
the activity plan. Also, we must keep a copy of the original realization path, since it is possible
that the new observed action is not associated to the path’s activity, (ii) a realization path
pathj ∈ Path is removed if the maximum delays for the next possible action in the activity plan
are exceeded, (iii) a realization path pathj is added in Path if the new observed action subsumes
one of the activity’s actions that can be directly carried out.
With this activity realization path set Path, we need to evaluate the possibility distributions
πPathC,tand πPathE,t
on Path, which indicates the possibility that a particular path is associated,
respectively, to a coherent behaviour or an erroneous behaviour. The coherent path realization
possibility distribution πPathC,ton Path indicates the possibility, denoted by πPathC,t
(pathj),
that a particular path pathj ∈ Path is associated with a coherent behaviour according to an
observed plan Pobst . Thus, πPathC,tis obtained by considering, for each pathj ∈ Path, the
action prediction possibility for each action in the activity plan that could be the next one to
be carried out, the action prediction and recognition possibilities for the actions that are in the
path, the coherent activity realization possibility for the activity associated to the path, and the
time possibilities for the action transitions in the realization path.
The erroneous path realization possibility distribution πPathE,ton Path indicates the pos-
sibility, denoted by πPathE,t(pathj), that a particular path pathj ∈ Path is associated with
an erroneous behaviour according to an observed plan Pobst. Thereby, πPathE,t
is obtained by
considering, for each pathj ∈ Path, the action prediction and recognition possibilities for the
observed actions not in the realization path, and the erroneous activity realization possibilities
for the activity associated to the realization path.
The activity realization path set Path allows to identify activities that can be carried out
in a coherent way by the smart home occupant. These activities are denoted by the plausible
activity set Pposs. The observed behaviour, erroneous or coherent, may contain a subset of these
plausible activities, which are carried out in a coherent way. According to Pposs ⊆ P, there are
multiple hypotheses that can explain the observed behaviour of the occupant when he carries
out his activities of daily living.
Definition 5 (Behavioural hypothesis). A behavioural hypothesis hi ∈ Ht is a subset of Pposs,
where ∀αj ∈ hi, @αk ∈ hi, αi 6= αk ∧ αi vP αk. Ht denotes the behavioural hypothesis set
concerning the observation obst of the environment’s state.
Thus, a behavioural hypothesis hi ∈ Ht is an element of the powerset of Pposs (hi ∈ ℘(Pposs)),
where each activity plan α ∈ hi is not subsumed by another activity plan β ∈ hi. In others
27
words, a hypothesis is a set of activities (if any) that are partially or completely realized in a
coherent way (and possibly in an interleaved way) and are associated to a coherent behaviour or
an erroneous behaviour. So, for each hypothesis hi ∈ Ht, we have two interpretations (coherent
and erroneous behaviours). A hypothesis hi can be interpreted as a coherent behaviour where
the occupant carries out, in a coherent way, the activities in the hypothesis. Those activities can,
at the current observation time, be partially realized. Also, a hypothesis hi can be interpreted
as an erroneous behaviour where the occupant carries out some activities in an erroneous way,
while the activities in the hypothesis, if any, are carried out in a coherent way.
According to these two interpretations, we evaluate the coherent behaviour and erroneous
behaviour possibility distributions, πBevC,tand πBevE,t
, on the behaviour hypothesis set Ht.
The coherent possibility distribution πBevC,tindicates, for each hi ∈ Ht, the possibility that a
behaviour hypothesis denotes coherent behaviour according to the observed plan Pobst and the
realization paths associated to the activities in the hypothesis. If there is no activity in the
hypothesis or that some observed actions in Pobstare not associated to at least one realization
path, the possibility is zero. Otherwise, for each behaviour hypothesis hi ∈ Ht, the possibility
πBevC,t(hi) is obtained by selecting the maximum value among the activities’ minimal coherent
realization path possibilities:
πBevC,t(hi) =
0 if there are actions in Pobst
missing from activities in hi,
or if hi is empty,
maxαj∈hi
minpathk∈Path,
αj∈pathk
(πPathC,t
(pathk)) else.
The erroneous possibility distribution πBevE,tindicates, for each hi ∈ Ht, the possibility
that a behaviour hypothesis denotes erroneous behaviour according to the observed plan Pobst
and the partial paths associated to the activities in the hypothesis. If there is no activity in
the hypothesis, the possibility is obtained by selecting the minimal action recognition possibility
among the actions in the observed plan Pobst. Else, for each behaviour hypothesis, the possibility
πBevE,t(hi) is obtained by selecting the maximum value among the activities’ minimal erroneous
28
partial path possibilities:
πBevE,t(hi) =
min
(al,tk)∈Pobst
(πrectk
(al))
if hi is empty,
maxαj∈hi
minpathk∈Path,
αj∈pathk
(πPathE,t
(pathk)) else.
With those two possibility distributions, we can evaluate, in the same manner as the action
recognition, the possibility and necessity measures that each hypothesis represents coherent or
erroneous behaviour that could explain the observed actions Pobst. The possibility and necessity
measures that a hypothesis in B ⊆ Ht represents coherent behaviour that could explain the
observed plan Pobst , is given by ΠBevC,t(B) and NBevC,t
(B), which are obtained from the πBevC,t
possibility distribution. The possibility and necessity measures that a hypothesis in B ⊆ Ht
represents erroneous behaviour that could explain the observed plan Pobst, is given by ΠBevE,t
(B)
and NBevE,t(B), which are obtained from the πBevE,t
possibility distribution. The most possible
and necessary hypotheses are then selected according to the ΠBevC,t, NBevC,t
, ΠBevE,tand
NBevE,tmeasures on the hypothesis set Ht. The result of the behaviour recognition is then sent
to an assistant process, which will use this information in order to plan a helping task if needed.
4.5 Activity Recognition Process Overview
In order to illustrate the behaviour recognition process step by step, let’s suppose that we have
the same smart home with Peter. When Peter carries out an action in the smart home, the
action recognition process sends the observed plan Pobst , the distributions πrect and πrect on A,
and the environment contexts entailed by obst to the behaviour recognition process. According
to this information, the behaviour recognition process generates a behavioural hypothesis set
Ht. Each hypothesis h ∈ Ht denotes a behaviour where some activities (if any) are carried out
in a coherent way by Peter. Since these coherent activity realizations may occur in erroneous
and coherent behaviours from Peter, the πBevC,tand πBevE,t
distributions on Ht are evaluated.
The hypothesis set Ht and the distributions πBevC,tand πBevE,t
are then sent to an assistance
process, which will plan a helping task to Peter if necessary.
The behaviour recognition process is based on activity plans, which are described with a
5-tuple (Aα, ≺α, Crealα , πrealα , πerrα). From the entailed contexts, the process evaluates the
πrealt and πerrtdistributions on the activity plan ontology P. These distributions allow to
indicate the possibility, for each activity, that the observed state is related to a coherent or an
erroneous realization of the activity by Peter according to the entailed environment contexts.
29
By taking into account the observed actions Pobstand the activity plans in P, the recognition
process evaluates the activity realization paths Path, where each path contains a subset of the
observed actions Pobst . An activity realization path p ∈ Path represents a partial or complete
realization of an activity that respects the temporal constraints specified in the activity plan, so
that this realization is coherent.
Let’s suppose an observed plan Pobst = {(OpenDoorInKitchen, t = 0)}, which indicates
that Peter opened a door in the kitchen at time t = 0. Let’s suppose the activities GetCookie
and GetMilk. The GetCookie activity indicates that Peter want to get cookies by open-
ing the pantry door (OpenPantryDoor), taking a box of cookies (TakeCookie), and closing
the pantry door (ClosePantryDoor). The GetMilk activity indicates that Peter want to
get milk by opening the refrigerator door (OpenRefrigeratorDoor), taking the milk carton
(TakeMilk), and closing the refrigerator door (CloseRefrigeratorDoor). According to the
observed action (OpenDoorInKitchen) and the action ontology A, both activities are plausi-
ble as currently carried out by Peter. Hence, the observed action OpenDoorInKitchen sub-
sumes the first action in both activities, OpenPantryDoor vA OpenDoorInKitchen and
OpenRefrigeratorDoor vA OpenDoorInKitchen, so that we have partial activity realiza-
tion paths for both activities. For GetCookie, we have the realization path p1, described by
(GetCookie, Pobst, Rp1) where Rp1 = {((OpenDoorInKitchen, t = 0), OpenPantryDoor)}.
For GetMilk, we have the realization path p2, described by (GetMilk, Pobst, Rp2) where
Rp2 = {((OpenDoorInKitchen, t = 0), OpenRefrigeratorDoor)}. Thus, the realization path
set consists to Path = {p1, p2}.
Now, let’s suppose that the next observed action is (TakeObjectInKitchen, t = 1), which
indicates that Peter took an object in the kitchen at time t = 1. According to A, Take-
ObjectInKitchen subsumes TakeMilk and TakeCookie. Then, the paths p1 and p2 can be
extended by adding this new observed action. However, the delay between the observations
t = 0 and t = 1 exceeds the maximum delay between the realization of OpenRefrigeratorDoor
and TakeMilk described in the GetMilk activity plan. Consequently, the path p2 is re-
moved from Path, which is now composed of p1 and p3. The path p3 is an extension of
p1 and is described by (GetCookie, Pobst , Rp3) where Rp3 = {((OpenDoorInKitchen, t =
0), OpenPantryDoor), ((TakeObjectInKitchen, t = 1), TakeCookie)}. The path p1 remains
in Path since TakeObjectInKitchen could be associated to another activity or be an error, and
that p1 is still temporally valid according to the GetCookie activity plan.
The realization paths p1 and p3 may occur in a coherent or an erroneous behaviour from
30
Peter when he carries out his activities of daily living. Consequently, the recognition process
evaluates the πPathC,tand πPathE,t
possibility distributions on Path. For each path p ∈ Path,
πPathC,t(p) indicates the possibility that the realization path p occurs in a coherent behaviour,
while πPathE,t(p) indicates the possibility that the realization path p occurs in an erroneous
behaviour.
Let’s suppose that Path also contains realization paths for the AnyActivity, GetObject
and GetObjectInKitchen activity plans. Thus, the plausible carried out activity set is defined
by Pposs = {AnyActivity, GetObject, GetObjectInKitchen, GetCookie}. From Pposs, the
recognition process generates a behavioural hypothesis set Ht. Each hypothesis h ∈ Ht describes
a set of activities that are coherently carried out by Peter, which may occur in a coherent or
erroneous behaviour. Thereby, we may observe an erroneous behaviour where Peter carries
out activities in h in a coherent way while others are carried out in an erroneous way, or we
may observe a coherent behaviour where Peter carries out the activities in h in a coherent way.
According to Path, the hypothesis set consists toHt = {h1, h2, h3, h4, h5}, where h1 = ∅, h2 =
{AnyActivity}, h3 = {GetObject}, h4 = {GetObjectInKitchen} and h5 = {GetCookie}. By
the restriction of activity subsumption in hypotheses, we have Ht ⊂ ℘(Pposs). Indeed, we have
the activity subsumption relations GetCookie vP GetObjectInKitchen vP GetObject vP
AnyActivity, which prevent the occurrence of more than one plausible activities from Pposs
in a hypothesis. Each hypothesis h ∈ Ht can represent a coherent behaviour or an erroneous
behaviour from Peter. Thus, the recognition process must evaluate the πBevC,tand πBevE,t
possibility distribution on Ht. The πBevC,tdistribution allows to indicate, for each hypothesis
h ∈ Ht, the possibility πBevC,t(h) that Peter has a coherent behaviour when he carries out the
activities in h. The πBevE,tdistribution allows to indicate, for each hypothesis h ∈ Ht, the
possibility πBevE,t(h) that Peter has an erroneous behaviour when he carries out in a coherent
way, if any, the activities in h.
The Table 2 allows to illustrate the evaluation process for the coherent behaviour and erro-
neous behaviour possibilities πBevC,tand πBevE,t
for the hypothesis h5.
The hypothesis h5 refers to coherent or erroneous behaviours where Peter carries out the
GetCookie activity. According to current observations, the realization path set for GetCookie
consists of p1, p3, p4, and p5. Consequently, the possibility value of a coherent behaviour for
hypothesis h5 is πBevC,t(h5) = min
(πPathC,t
(p1), πPathC,t(p3), πPathC,t
(p4), πPathC,t(p5)
)=
min(0.8, 0.9, 0.9, 0.8) = 0.8. Furthermore, the possibility value of an erroneous behaviour for
hypothesis h5 is πBevE,t(h5) = min
(πPathE,t
(p1), πPathE,t(p3), πPathE,t
(p4), πPathE,t(p5)
)=
31

min(0.3, 0.1, 0.2, 0.4) = 0.1. Both values (πBevC,t(h5) = 0.8 and πBevE,t
(h5) = 0.1) will be
used in order to evaluate the coherent and erroneous behaviour possibility and necessity measures
of subsets of Ht that contains h5.
The behavioural hypothesis set Ht and the πBevC,tand πBevE,t
possibility distributions on Ht
are then sent to an assistance process. This assistance process will plan, if necessary, a helping
task carried out by the smart home actuators. This helping task is planned according to the
received information and Peter’s profile.
5 Smart Home Validation
In this section, we present results from our possibilistic model implementation in the Ambient
Intelligence for Home based Elderly Care (AIHEC) project’s infrastructure at Singapore’s Insti-
tute for Infocomm Research (I2R) (Phua et al., 2009). This infrastructure consists of a simulated
smart home environment, like the ones in DOMUS and LIARA labs, which contains stations
that represent smart home rooms (pantry, dining, . . . ). The behaviour of the observed person is
monitored by using pressure sensors (to detect sitting on a chair), RFID antennas (to detect cup
and plate on the table and in the cupboard), PIR sensors (to detect movement in the pantry and
dining areas), reed switch sensors (to detect opening and closing of the cupboard), accelerometer
sensors (to detect occupant’s hand movements), and video sensors (mainly to annotate and audit
the observed occupant’s behaviour). The event manager, which collect the dining and pantry
sensor events, is based on a Dynamic Bayes Network (DBN) (Tolstikov et al., 2008). It should
be noted that other approaches could be used instead of DBN in the event manager. Also, the
lab environment uses a wireless sensor network.
Our possibilistic behaviour recognition model is implemented according to the simplified
smart home system architecture (Figure 5 ), and is subdivided into three agents: environment
representation agent, action recognition agent, and behaviour recognition agent.
The system architecture works as follows. Basic events related to an action realization by
the smart home’s occupant are generated by the sensors and are sent to a sensor event manager
agent. The sensor event manager agent, which is based on a DBN in this case, infers that an
action was carried out and sends the current smart home environment’s state, which could be
partially observable, to the environment representation agent. The environment representation
agent, which has a virtual representation of the smart home environment encoded in a Pellet
description logic system (Sirin et al., 2007), infers which contexts are entailed by the current
(partial) environment state. Those entailed contexts are then sent to an action recognition agent,
32

which will use a possibilistic action formalization and the action ontology to select the most
plausible action that could explain the observed changes in the environment. This recognized
action is sent to a behaviour recognition agent, which will use the sequence of observed actions
(observed plan) and the activity plan ontology to generate possibilistic hypotheses about the
behaviour of the observed occupant. These hypotheses, with information from other agents,
will be used by an assistive agent, which will plan a helping task, if needed, towards the smart
home’s occupant by using the smart home’s actuators.
5.1 Results
A previous trial was carried out in this simulated smart home environment, where 6 actors sim-
ulated a meal-time scenario several times (coherent and erroneous behaviour) on 4 occasions.
This meal-time scenario, which is an eating ADL (activity of daily living), contains several sub-
activities: getting the utensils (plate), getting the food (cookie), getting drink (water bottle)
from the cupboard in the pantry to the table, eating and drinking while sitting on the chair, and
putting back the utensils, food, and drink in the cupboard. These activities can be interleaved.
For instance, the actor can bring the utensils, food and drink at the same time to the table,
where some actions are shared between these activities (e.g. open the cupboard). Some erro-
neous realizations for this scenario were carried out and are mainly associated with realization
errors (forget an activity step, add irrelevant actions, break the temporal constrain between two
activity’s actions), where some of them can also be considered as an initiation error (do not start
an activity), or a completion error (forget to complete the activity).
By using the sensor databases for each observed behaviour, a set of observed sequences of
smart home events was recognized, constituting a set of behavioural realizations. Among those
observed behaviours, we select 40 (10 coherent/30 erroneous) scenario realizations that are the
most representative, since some of them are similar. The selected coherent scenario realizations
represent a coherent behaviour of the activities, in an interleaved way, in the meal-time scenario.
The selected erroneous scenario realizations represent an erroneous behaviour of the meal-time
scenario, with or without some coherent partial activity realizations. In those erroneous realiza-
tions, there is usually more than one error type that occurs (realization, initiation and completion
errors). Each selected scenario realization was simulated in our model implementation by in-
putting the smart home events related to each realization and to use the sensor event manager,
in order to recognize the sequence of observed actions and to generate hypotheses concerning
the observed behaviour, according to the environment, action and activity ontologies.
33
The main goal of our implementation experimentation is to evaluate the high-level recog-
nition accuracy about the observed behaviour associated with the realization of the meal-time
scenario. Since our recognition approach is based on the knowledge about the observed smart
home environment’s state, problems related to sensors (e.g. noise) are managed by a sensor event
manager, in this case a DBN. This sensor event manager sends the observed environment’s state
to our environment manager agent, which infers the plausible contexts that could explain the
current observed state.
Another goal of our implementation experimentation is to evaluate empirically the runtime
performance of our proposed approach. For each new observed action, we evaluated the runtime
concerning the inference of plausible contexts, the action prediction and recognition, and the
generation of behavioural hypotheses. It should be noted that we focused more specifically
on the computational load for the components related to our approach. Thus, sensor event
management is not taken in consideration when evaluating the implementation performance.
Concerning behaviour recognition accuracy, which results are shown in Figure 6, three ways
to filter hypotheses were considered. The first filter is to evaluate if a specific scenario realization
is among the most plausible behavioural hypotheses. In others words, we consider subsets of
the hypothesis set Ht that contain only one hypothesis. Our model was able to recognize 56.7%
of the erroneous behaviours and 80% of the coherent behaviour (overall 62.5%) (first part of
Figure 6).
The second filter is to evaluate if a specific scenario realization is included in a hypothesis set
that is among the most plausible hypothesis subsets of the hypothesis set Ht. A most plausible
hypothesis subset consists to a hypothesis set where possibility values of the hypotheses in the
subset maximize (according to a threshold criteria) the necessity measure of the subset. We
use a threshold criteria (fixed value or ratio of possibility measure) for the necessity measure in
order to reduce the size of the hypothesis subset. Our proposed approach was able to recognize
63.3% of the erroneous behaviour (overall 67.5%) (second part of Figure 6).
The last filter is to consider erroneous scenario realizations as generic erroneous behaviours,
without taking into account activities that may by carried out in a coherent way. Our proposed
approach was able to recognize 100% of them (95% overall) (third part of Figure 6 ). It should
be noted that in the three filters, the coherent behaviour recognition accuracy is constant at
80%.
There are different reasons that explain the moderate recognition accuracy results and the
difference between the filters. One of the main reasons that some behaviour realizations (coherent
34

and erroneous) are not recognized is related to the rigidity of the action temporal relation, where
the only time constraint is a possibility distribution on duration between actions. In this case,
some erroneous or coherent realizations are instead considered as generic erroneous realizations,
since the coherent activities’ realizations are not recognized. Since some temporal constraints
are not respected, the realization paths of these activities are rejected.
Furthermore, in some cases, the sensor configuration changes a little bit (mainly the PIR
sensors). These modifications influence the accuracy of the event manager system. For instance,
a change in the PIR sensor localization can produce a lot of perturbations: zones detected
by the PIR sensors become overlapped, while the training on the event recognizer is made on
non-overlapping zones.
Finally, it should by noted that all possibility distributions, temporal constraints and action
descriptions are obtained from one’s belief, unlike most probabilistic approaches that use histor-
ical sensor data. However, this approximation has shown promising results and a learning phase
on the recognition system parameters would improve the recognition accuracy.
Concerning the runtime performance, Figure 7 plots, for each scenario realization, the system
runtime for each observed action that was recognized by our possibilistic model implementation.
The runtime includes the interactions with the description logic reasoning system, the action
recognition and the behaviour recognition. Since the focus of the experimentation is the perfor-
mance of our behaviour recognition implementation, the runtime prior to the smart home event
recognition is not considered.
For this simulation, the runtime is generally between 100 and 200 milliseconds for each action
observed. We observe bell shaped curves, which are an effect that results from a diminution of the
activity realization path set’s size. This size diminution results from the fact that some temporal
constraints between actions described in activity plans are no longer satisfied, so that subsets of
the activity realization path set must be removed. It should be noted that the number of actions
carried out and the time between them for each scenario realization are different from those of
another scenario realization, since each scenario realization represents a specific behaviour.
5.2 Discussion
Several previous related approaches presented earlier have conducted the same kind of experi-
ments that we did, using synthetic and real data on comparable problems of similar size. Com-
paring our experimental results with these previous one is not a simple task. One of the main
reasons is the rather different nature of the used recognition approaches and algorithms. In our
35
case, we experimented with a hybrid (logical and possibilistic) approach aiming to recognize
precisely the occupant’s correct and incorrect behaviour from an approximate description of
actions and activities obtained from an expert’s belief, unlike most approaches that use sensor
historical data from a learning phase. The output of our recognition algorithm, which takes
the form of a set of behaviour hypotheses with a possibility distribution that partially order
these hypotheses according to the possibility and necessity measures obtained from the possi-
bility distribution, is difficult to compare with other probabilistic approaches, since they do not
capture the same facets of uncertainty. Thus, probability theory offers a quantitative model for
randomness and indecisiveness, while possibility theory offers a qualitative model of incomplete
knowledge (Dubois et al., 2004), where probability law is difficult to obtain because to the ir-
rational nature of the domain (cognitively impaired people). This is a situation of complete
uncertainty, namely ignorance of the occupant’s behaviour.
Moreover, the objectives of our respective experiments are also somewhat different. In our
case, the focus of our experiment was to know if our method is able to correctly identify the
observed occupant’s correct behaviour, which could be related to the realization of multiple
interleaved activities and to erroneous deviations from the occupant. In contrast, the experiment
of Mihailidis et al. (2007), as an example, focused only on the identification of the person’s current
activity step, while assuming to know the current on-going activity. These two objectives and
methods are quite different and lead to some difficulties in comparing them.
Despite the heterogeneous nature of previous works experiments, we can draw some useful
comparisons and conclusions from the evaluation of their experimental results. First, most of
the previous work exploited a form of probabilistic model (Markovian or Bayesian based). These
approaches seem to give better results in recognizing an on-going activity and the current activity
step with a small plan library. For instance, the results presented by Helal et al. (2009) with
a Hidden Markov Model give a recognition accuracy of 98% in identifying the correct activity
among five candidates. Also, this approach was able to detect, in a qualitative way, the omitted
steps of those activities. The approach of Patterson et al. (2007), based on Dynamic Bayesian
Networks, was able to identify the specific on-going activity with a recognition accuracy higher
than 80%. The Markovian model proposed Mihailidis et al. (2007) also has shown amazing
results in recognition accuracy. However, this last approach only focused on monitoring a single
activity.
In the light of these experimental results, we can draw some comparisons. First, despite
their good results, these previous probabilistic models seem to be adapted to small recognition
36
contexts with only a few activities. It seems much more difficult to use them on a large scale,
knowing that each activity must be handcrafted and included in a stochastic model, while con-
serving a normalized probability distribution. Also, the propagation of probabilities following
an observation can be quite laborious while dealing with a large activity library. One of the
main probabilistic approaches, the Hidden Markov Model, requires an exponential number of
parameters (according to the number of elements that describe the observed state) to specify the
transition and observation models, which means that we need a lot of data to learn the model,
and the inference is exponential (Murphy, 2002).
Moreover, a lot of these approaches assume that the sensors are not changing and the recog-
nition is then based on the sensor events and on historical sensors data. This is a limitation,
since the smart home environment is dynamic (sensors can be removed, added, moved) and the
recognition system could be deployed in different smart homes. For high-level recognition, it is
more easier to work with environment’s contexts, which are common in different smart homes,
if more general concepts are used to describe the contexts.
Also, most previous models simply do not take into account the possibility of recognizing
coherent behaviour composed of few activities with their steps interleaved. They usually propose
the most likely current activity, according to a probability distribution on the activity set. They
also tend to only identify specific types of errors (ex. missing steps), while avoiding the others.
Few approaches take into account both coherent and erroneous behaviours when they infer the
observed behaviour.
Finally, we believe that the biggest problem of using classical probabilistic theory is the
inability of handle together the imprecision and the uncertainty of the incomplete information
in a natural way. One way to deal with this difficulty is to use a probabilistic interval, which
means that there are two probability distributions (one for the minimum values and one for
the maximum values). Our approach based on possibility theory, seems to have more flexibility
and potential, and to be more advantageous regarding these issues. For instance, by using only
one possibility distribution, we can obtain possibility and necessity measures (the interval) on
the hypotheses. It allows us to capture partial belief concerning the activities’ execution from
human experts, since this theory was initially meant to provide a graded semantics to natural
language statements (Zadeh, 1978). It also allows us to manage a large quantity of activities, to
take into account multiple interleaved plans, and to recognize most types of correct and incorrect
behaviour. Furthermore, applications based on possibility theory are usually computationally
tractable (Dubois and Prade, 2007).
37

5.3 Summary of Our Contribution
By looking at the previous approaches, we can note that most applications are based on a
probabilistic reasoning method for recognizing the observed behaviour. They mainly learn the
activities’ patterns by using real sensor data collected in the smart home. A potential drawback
of such an approach is that, in order to have an adequate probabilistic model, the required
amounts of historical data on activity realization can be quite large. Also, since the inhabitant
profile influences the activities’ realization, the probabilistic model should be tailored to the
inhabitant in order to properly recognize the observed behaviour. Furthermore, if we want
to deploy an assistive system in existing homes, where each home configuration can be quite
different from another, the learning process will need to be carried out again. Some approaches
propose learning erroneous patterns of some activities, but since there exist many ways to carry
out activities having errors associated with their realizations, the erroneous pattern library will
be always incomplete. Moreover, the patient’s habits may change from time to time, according
to new experiences, the hour of the day, his physical and psychological condition, etc. Therefore,
the patient’s routines must be constantly re-learned, and an adaptation period is required by
the system.
Our possibilistic activity recognition model can be seen as a hybrid between logical and
probabilistic approaches. By using knowledge concerning the environment state, the action
ontology, the activity ontology, and uncertainty and imprecision associated with each level of
the recognition process, our model evaluates a set of behavioural hypotheses, which is ranked
according to the erroneous and coherent behaviour possibility distributions. Since learning the
patient profile from the sensors is a long term process, the use of possibility theory in our
recognition model allows us to capture partial belief from human experts, from its origin as a
graded semantics to natural language statements (Zadeh, 1978). The knowledge of these human
experts concerning the patient profile is incomplete and imperfect, and therefore difficult to
represent by probability theory. Our approach takes into account the recognition of coherent
(interleaved or not) and erroneous behaviour, where both behaviour types are valid hypotheses
to explain the observed realization of some activities, instead of choosing one behaviour type
by default. For instance, if some events are not in the learned activity pattern, instead of
considering only erroneous behaviour or interleaved coherent behaviour, both behaviour types
must be considered in the hypotheses that could explain the observed behaviour. In other
words, erroneous and coherent (interleaved or not) behaviours are both valid explanations for
the patient’s observed behaviour when he carries out some activities.
38

6 Conclusion
Despite the important progress made in the activity recognition field for the last 30 years, many
problems still occupy a significant place at a basic level of the discipline and its applications. This
paper has presented a formal framework of activity recognition based on possibility theory as the
semantic model of the agent’s behaviour. It should be emphasized that the initial framework and
our preliminary results are not meant to bring exhaustive or definitive answers to the multiple
issues raised by activity recognition. However, it can be considered as a first step toward a more
expressive ambient agent recognizer, which will facilitate the support of imprecise and uncertain
constraints inherent to smart home environments. This approach was implemented and tested
on a real data set, showing that it can provide, inside a smart home, a viable solution for the
recognition of the observed occupant’s behaviour, by helping the system to identify opportunities
for assistance. An interesting perspective for the enrichment of this model consists of using a
possibilistic description logic to represent the environment’s observed state, thus taking into
account the uncertainty, imprecision and fuzziness related to the information obtained from
the sensors and to the description (concepts, roles, assertions) of the environment. Another
perspective is to use machine learning approaches during the recognition system usage period,
which will improve the reliability of the model since the occupant’s lifestyle may change. Finally,
we clearly believe that considerable future work and large scale clinical trials will be necessary
to help evaluate the effectiveness of this model in the field.
References
Albrecht, D. W., I. Zukerman, and A. E. Nicholson (1998). Bayesian models for keyhole plan
recognition in an adventure game. User Modeling and User-Adapted Interaction 8, 5–47.
Augusto, J. C. and C. D. Nugent (Eds.) (2006). Designing Smart Homes: The Role of Artificial
Intelligence, Volume 4008 of Lecture Notes in Artificial Intelligence. Springer.
Avrahami-Zilberbrand, D. and G. A. Kaminka (2007). Incorporating observer biases in keyhole
plan recognition (efficiently!). In Proc. of the Twenty-Second AAAI Conference on Artificial
Intelligence, pp. 944–949. AAAI Press, Menlo Park, CA.
Baader, F., D. Calvanese, D. L. McGuinness, D. Nardi, and P. F. Patel-Schneider (Eds.) (2007).
The Description Logic Handbook: Theory, Implementation, and Applications (2e ed.). Cam-
bridge University Press.
39
Boger, J., J. Hoey, P. Poupart, C. Boutilie, G. Fernie, and A. Mihailidis (2006). A planning
system based on Markov Decision Processes to guide people with dementia through activities
of daily living. IEEE Transactions on Information Technology in BioMedicine 10(2), 323–333.
Bouchard, K., B. Bouchard, and A. Bouzouane (2011). Qualitative spatial activity recogni-
tion using a complete platform based on passive rfid tags: Experimentations and results. In
B. Abdulrazak, S. Giroux, B. Bouchard, H. Pigot, and M. Mokhtari (Eds.), Proc. of the 9th In-
ternational Conference on Smart Homes and Health Telematics (ICOST 2011), Volume 6719
of Lecture Notes in Computer Science, pp. 308–312. Springer Berlin / Heidelberg.
Carberry, S. (2001). Techniques for plan recognition. User Modeling and User-Adapted Interac-
tion 11, 31–48.
Casas, R., R. B. Marín, A. Robinet, A. R. Delgado, A. R. Yarza, J. Mcginn, R. Picking, and
V. Grout (2008). User modelling in ambient intelligence for elderly and disabled people. In
Proc. of the 11th ICCHP, Number 5105 in Lecture Notes in Computer Science. Springer-
Verlag.
Charniak, E. and R. G. Goldman (1993). A bayesian model of plan recognition. Artificial
Intelligence 64, 53–79.
Chen, L., C. Nugent, M. Mulvenna, D. Finlay, and X. Hong (2009). Semantic smart homes: To-
wards knowledge rich assisted living environments. In S. McClean, P. Millard, E. El-Darzi, and
C. Nugent (Eds.), Intelligent Patient Management, Volume 189 of Studies in Computational
Intelligence, pp. 279–296. Springer.
Christensen, H. B. (2002). Using logic programming to detect activities in pervasive healthcare.
In Proc. of the 18th International Conference on Logic Programming (ICLP 2002), Volume
2401 of Lecture Notes in Computer Science, pp. 421–436.
Cohen, P. R., C. R. Perrault, and J. F. Allen (1982). Beyond question answering. In W. G.
Lehnert and M. H. Ringle (Eds.), Strategies for Natural Language Processing, pp. 245–274.
Lawrence Erlbaum Associates.
Cook, D. J., M. Youngblood, and S. K. Das (2006). A multi–agent approach to controlling a
smart environment. In J. C. Augusto and C. D. Nugent (Eds.), Designing Smart Homes:
The Role of Artificial Intelligence, Volume 4008 of Lecture Notes in Artificial Intelligence, pp.
165–182. Springer.
40
Diamond, J. (2006). A report on Alzheimer’s disease and current research. Technical report,
Alzheimer Society of Canada.
Dubois, D., L. Foulloy, G. Mauris, and H. Prade (2004). Probability–possibility transformations,
triangular fuzzy sets, and probabilistic inequalities. Reliable computing 10(4), 273–297.
Dubois, D., A. HadjAli, and H. Prade (2007). A possibility theory–based approach to the
handling of uncertain relations between temporal points. International Journal of Intelligent
Systems 22(2), 157–179.
Dubois, D. and H. Prade (1988). Possibility Theory: An Approach to Computerized Processing
of Uncertainty. Plenum Press.
Dubois, D. and H. Prade (2003). Possibility theory and its applications: a retrospective and
prospective view. In The 2003 IEEE International Conference on Fuzzy Systems, pp. 5–11.
Dubois, D. and H. Prade (2005). Traiter le flou et l’incertain. Dossier Pour la Science 49,
114–119.
Dubois, D. and H. Prade (2007). Qualitative possibility theory in information processing. In
M. Nikravesh, J. Kacprzyk, and L. A. Zadeh (Eds.), Forging New Frontiers: Fuzzy Pioneers
II, Studies in Fuzziness and Soft Computing, pp. 53–83. Springer.
Geib, C. (2007). Plan recognition. In A. Kott and W. M. McEneaney (Eds.), Adversarial
Reasoning: Computational Approaches to Reading the Opponent’s Mind, pp. 77–100. Chapman
& Hall/CRC.
Geib, C. W. and R. P. Goldman (2001). Plan recognition in intrusion detection systems. In
Proceedings of DARPA Information Survivability Conference & Exposition (DISCEX) II, pp.
1–10.
Geib, C. W. and R. P. Goldman (2005). Partial observability and probabilistic plan/goal recog-
nition. In Proceedings of the IJCAI workshop on Modeling Other from Observations, pp. 1–6.
Giroux, S., T. Leblanc, A. Bouzouane, B. Bouchard, H. Pigot, and J. Bauchet (2009). The praxis
of cognitive assistance in smart homes. In B. Gottfried and H. Aghajan (Eds.), Behaviour
Monitoring and Interpretation – BMI – Smart Environments, Volume 3 of Ambient Intelligence
and Smart Environments, pp. 183–211. IOS Press.
Haigh, K. Z., L. M. Kiff, and G. Ho (2006). The independent lifestyle assistant: Lessons learned.
Assistive Technology 18(1), 87–106.
41
Heinze, C., S. Goss, and A. Pearce (1999). Plan recognition in military simulation: Incorporating
machine learning with intelligent agents. In Proceedings of IJCAI’99 Workshop on Team
Behaviour and Plan Recognition, pp. 53–64.
Helal, A., D. J. Cook, and M. Schmalz (2009). Smart home–based health platform for be-
havioral monitoring and alteration of diabetes patients. Journal of Diabetes Science and
Technology 3(1), 141–148.
Helal, S., W. Mann, H. El-Zabadani, J. King, Y. Kaddoura, and E. Jansen (2005). The Gator
Tech Smart House: A programmable pervasive space. Computer 38(3), 50–60.
Hong, X. and C. Nugent (2011). Implementing evidential activity recognition in sensorised
homes. Technology and Health Care 19(1), 37–52.
Hong, X., C. Nugent, M. Mulvenna, S. McClean, B. Scotney, and S. Devlin (2009). Evidential
fusion of sensor data for activity recognition in smart homes. Pervasive and Mobile Comput-
ing 5(3), 236–252.
Horrocks, I. and P. Patel-Schneider (2004). Reducing OWL entailment to description logic
satisfiability. J. of Web Semantics 1(4), 345–357.
Horrocks, I., P. F. Patel-Schneider, and F. V. Harmelen (2003). From SHIQ and RDF to OWL:
The making of a web ontology language. Web semantics: science, services and agents on the
World Wide Web 1(1), 7–26.
Horrocks, I. and U. Sattler (1999). A description logic with transitive and inverse roles and roles
hierarchies. Journal of Logic and Computation 9(3), 385–410.
Jakkula, V. R. and D. J. Cook (2007). Using temporal relations in smart environment data for
activity prediction. In Proceedings of the 24th International Conference on Machine Learning,
pp. 1–4.
Kautz, H. A. (1987). A Formal Theory of Plan Recognition. Ph. D. thesis, University of
Rochester.
Kautz, H. A. (1991). A formal theory of plan recognition and its implementation. In J. F. Allen,
H. A. Kautz, R. N. Pelavin, and J. D. Tenenberg (Eds.), Reasoning About Plans, Chapter 2,
pp. 69–126. Morgan Kaufmann.
42
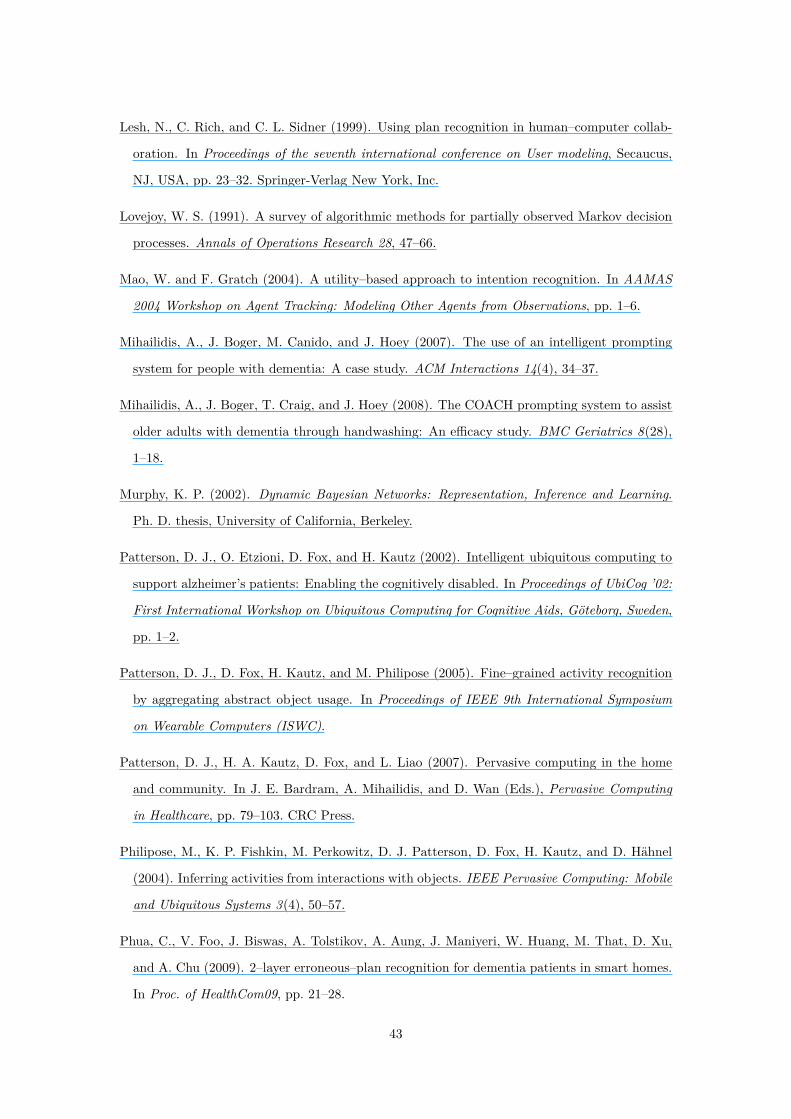
Lesh, N., C. Rich, and C. L. Sidner (1999). Using plan recognition in human–computer collab-
oration. In Proceedings of the seventh international conference on User modeling, Secaucus,
NJ, USA, pp. 23–32. Springer-Verlag New York, Inc.
Lovejoy, W. S. (1991). A survey of algorithmic methods for partially observed Markov decision
processes. Annals of Operations Research 28, 47–66.
Mao, W. and F. Gratch (2004). A utility–based approach to intention recognition. In AAMAS
2004 Workshop on Agent Tracking: Modeling Other Agents from Observations, pp. 1–6.
Mihailidis, A., J. Boger, M. Canido, and J. Hoey (2007). The use of an intelligent prompting
system for people with dementia: A case study. ACM Interactions 14(4), 34–37.
Mihailidis, A., J. Boger, T. Craig, and J. Hoey (2008). The COACH prompting system to assist
older adults with dementia through handwashing: An efficacy study. BMC Geriatrics 8(28),
1–18.
Murphy, K. P. (2002). Dynamic Bayesian Networks: Representation, Inference and Learning.
Ph. D. thesis, University of California, Berkeley.
Patterson, D. J., O. Etzioni, D. Fox, and H. Kautz (2002). Intelligent ubiquitous computing to
support alzheimer’s patients: Enabling the cognitively disabled. In Proceedings of UbiCog ’02:
First International Workshop on Ubiquitous Computing for Cognitive Aids, Göteborg, Sweden,
pp. 1–2.
Patterson, D. J., D. Fox, H. Kautz, and M. Philipose (2005). Fine–grained activity recognition
by aggregating abstract object usage. In Proceedings of IEEE 9th International Symposium
on Wearable Computers (ISWC).
Patterson, D. J., H. A. Kautz, D. Fox, and L. Liao (2007). Pervasive computing in the home
and community. In J. E. Bardram, A. Mihailidis, and D. Wan (Eds.), Pervasive Computing
in Healthcare, pp. 79–103. CRC Press.
Philipose, M., K. P. Fishkin, M. Perkowitz, D. J. Patterson, D. Fox, H. Kautz, and D. Hähnel
(2004). Inferring activities from interactions with objects. IEEE Pervasive Computing: Mobile
and Ubiquitous Systems 3(4), 50–57.
Phua, C., V. Foo, J. Biswas, A. Tolstikov, A. Aung, J. Maniyeri, W. Huang, M. That, D. Xu,
and A. Chu (2009). 2–layer erroneous–plan recognition for dementia patients in smart homes.
In Proc. of HealthCom09, pp. 21–28.
43
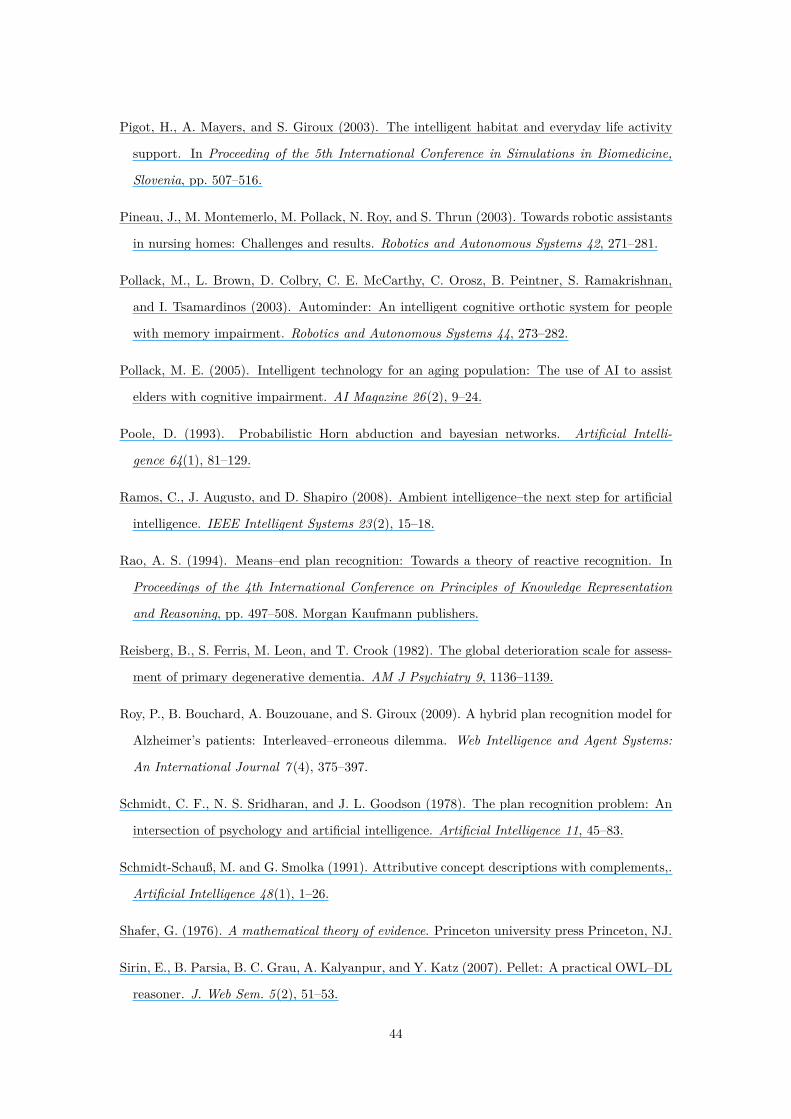
Pigot, H., A. Mayers, and S. Giroux (2003). The intelligent habitat and everyday life activity
support. In Proceeding of the 5th International Conference in Simulations in Biomedicine,
Slovenia, pp. 507–516.
Pineau, J., M. Montemerlo, M. Pollack, N. Roy, and S. Thrun (2003). Towards robotic assistants
in nursing homes: Challenges and results. Robotics and Autonomous Systems 42, 271–281.
Pollack, M., L. Brown, D. Colbry, C. E. McCarthy, C. Orosz, B. Peintner, S. Ramakrishnan,
and I. Tsamardinos (2003). Autominder: An intelligent cognitive orthotic system for people
with memory impairment. Robotics and Autonomous Systems 44, 273–282.
Pollack, M. E. (2005). Intelligent technology for an aging population: The use of AI to assist
elders with cognitive impairment. AI Magazine 26(2), 9–24.
Poole, D. (1993). Probabilistic Horn abduction and bayesian networks. Artificial Intelli-
gence 64(1), 81–129.
Ramos, C., J. Augusto, and D. Shapiro (2008). Ambient intelligence–the next step for artificial
intelligence. IEEE Intelligent Systems 23(2), 15–18.
Rao, A. S. (1994). Means–end plan recognition: Towards a theory of reactive recognition. In
Proceedings of the 4th International Conference on Principles of Knowledge Representation
and Reasoning, pp. 497–508. Morgan Kaufmann publishers.
Reisberg, B., S. Ferris, M. Leon, and T. Crook (1982). The global deterioration scale for assess-
ment of primary degenerative dementia. AM J Psychiatry 9, 1136–1139.
Roy, P., B. Bouchard, A. Bouzouane, and S. Giroux (2009). A hybrid plan recognition model for
Alzheimer’s patients: Interleaved–erroneous dilemma. Web Intelligence and Agent Systems:
An International Journal 7 (4), 375–397.
Schmidt, C. F., N. S. Sridharan, and J. L. Goodson (1978). The plan recognition problem: An
intersection of psychology and artificial intelligence. Artificial Intelligence 11, 45–83.
Schmidt-Schauß, M. and G. Smolka (1991). Attributive concept descriptions with complements,.
Artificial Intelligence 48(1), 1–26.
Shafer, G. (1976). A mathematical theory of evidence. Princeton university press Princeton, NJ.
Sirin, E., B. Parsia, B. C. Grau, A. Kalyanpur, and Y. Katz (2007). Pellet: A practical OWL–DL
reasoner. J. Web Sem. 5(2), 51–53.
44

Szewcyzk, S., K. Dwan, B. Minor, B. Swedlove, and D. Cook (2009). Annotating smart envi-
ronment sensor data for activity learning. Technology and Health Care 17 (3), 161–169.
Tolstikov, A., J. Biswas, C.-K. Tham, and P. Yap (2008). Eating activity primitives detection – a
step towards ADL recognition. In Proc. of the 10th IEEE Intl. Conf. on e–Health Networking,
Applications and Service (HEALTHCOM’08), pp. 35–41.
Zadeh, L. A. (1978). Fuzzy sets as a basis for a theory of possibility. Fuzzy Sets and Systems 1(1),
3–28.
45

Table 1: Example of a prediction distribution πpretand a recognition distribution πrect
on theaction ontology A.
πpretπrect
ΠpretNpret
ΠpretNpret
TakeFood 0.9 0.20.9 0.7 − −TakeCookie 0.8 0.1
TakePasta 0.7 0.2OpenDoor 0.2 0.8
− − 0.8 0.6OpenDoorInKitchen 0.2 0.8OpenPantryDoor 0.1 0.7OpenRefrigeratorDoor 0.1 0.7MAX 0.9 0.8 − − − −
Table 2: Example of a coherent realization path distribution πPathC,tand an erroneous realization
path distribution πPathE,ton the realization paths for the activity GetCookie.
p1 p3 p4 p5
πPathC,t0.8 0.9 0.9 0.8
πPathE,t0.3 0.1 0.2 0.4
46
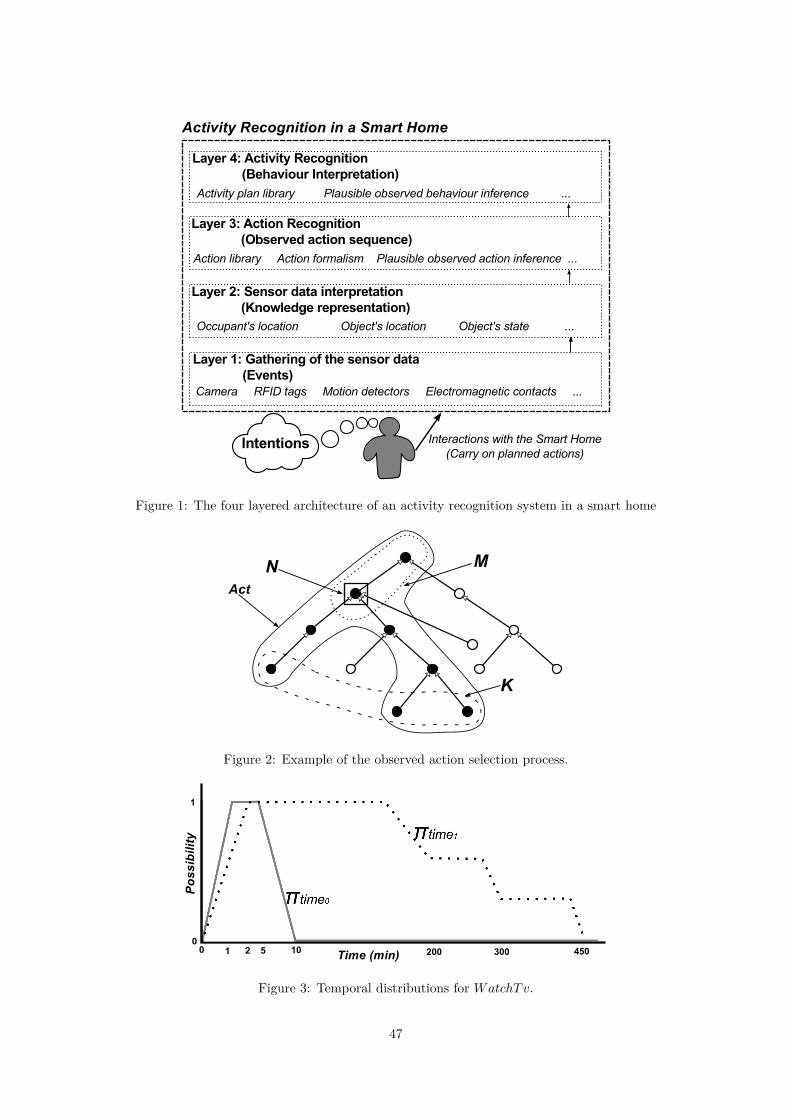
Figure 1: The four layered architecture of an activity recognition system in a smart home
Figure 2: Example of the observed action selection process.
Figure 3: Temporal distributions for WatchTv.
47
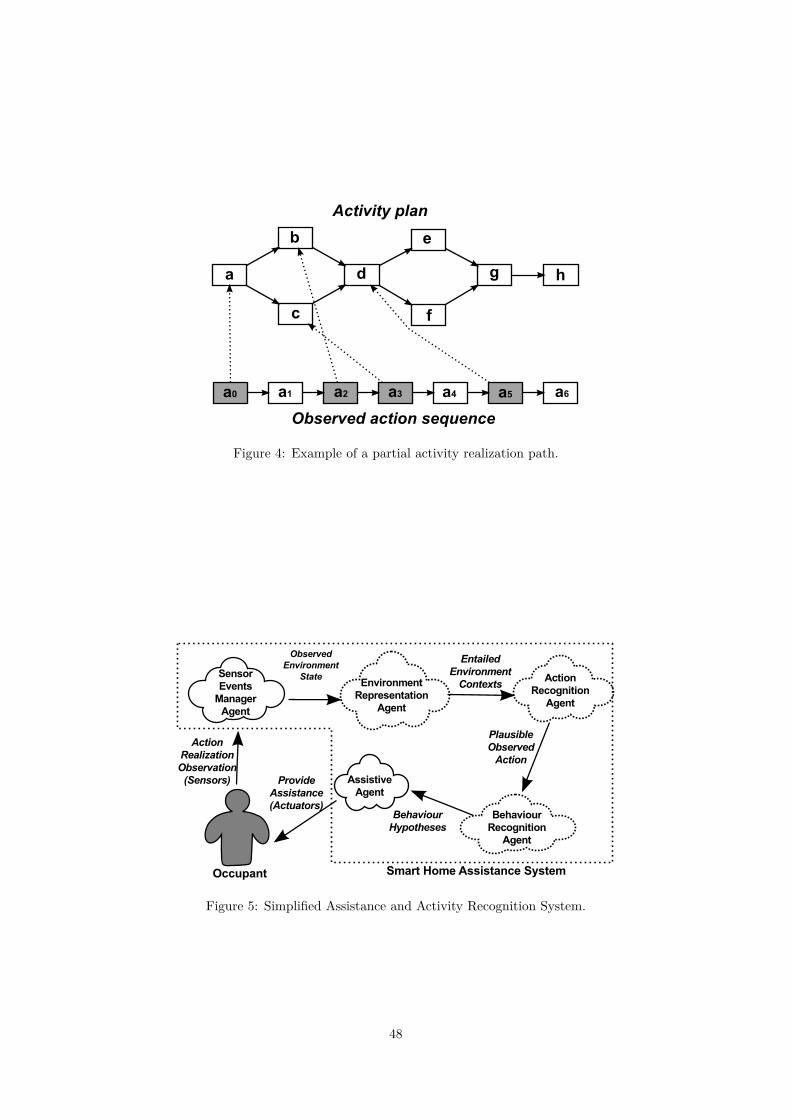
Figure 4: Example of a partial activity realization path.
Figure 5: Simplified Assistance and Activity Recognition System.
48
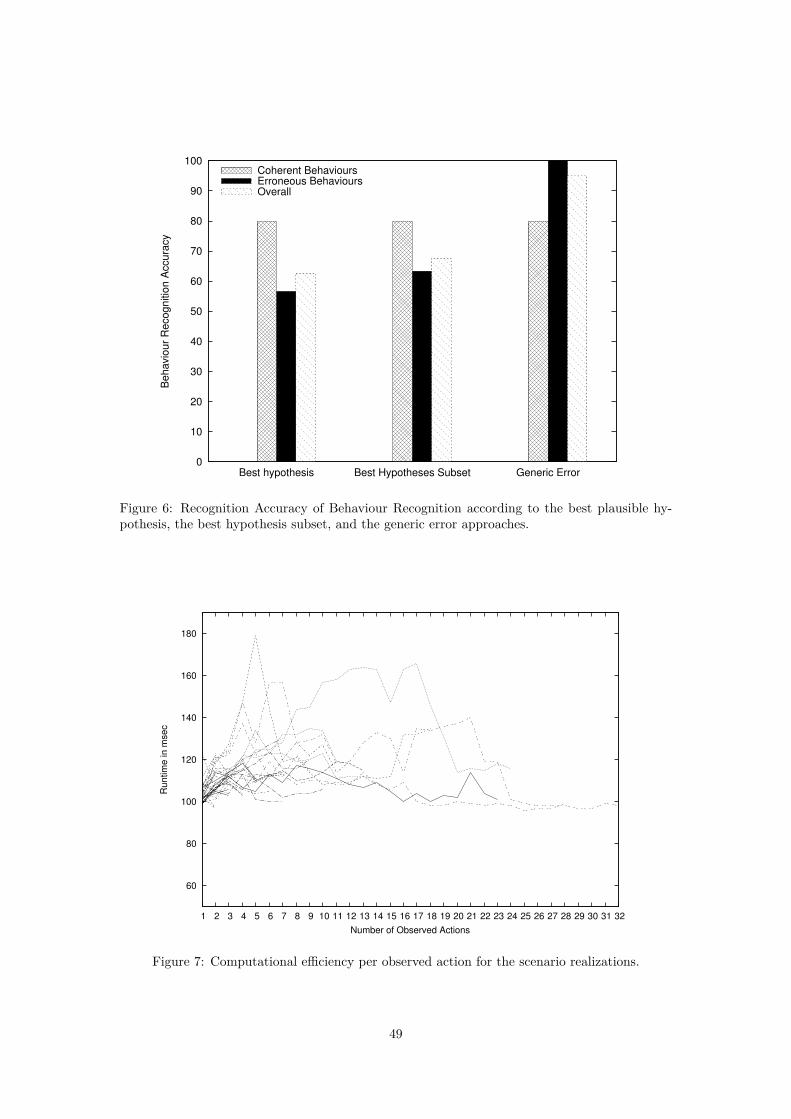
0
10
20
30
40
50
60
70
80
90
100
Best hypothesis Best Hypotheses Subset Generic Error
Behavio
ur
Recognitio
n A
ccura
cy
Coherent BehavioursErroneous BehavioursOverall
Figure 6: Recognition Accuracy of Behaviour Recognition according to the best plausible hy-pothesis, the best hypothesis subset, and the generic error approaches.
60
80
100
120
140
160
180
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32
Runtim
e in m
sec
Number of Observed Actions
Figure 7: Computational efficiency per observed action for the scenario realizations.
49





























