Embed Size (px)
Citation preview
Performance Assessment of Cooperative Positioning Techniques
Christian MENSING1, Stephan SAND1, Jimmy Jessen NIELSEN2, Benoit DENIS3, Mickael MAMAN3, Jonathan RODRIGUEZ4, Senka HADZIC4, Joaquim BASTOS4,
Ziming HE5, Yi MA5, Santiago ZAZO6, Vladimir SAVIC6, Igor ARAMBASIC6, Mohamed LAARAIEDH7, Bernard UGUEN7
1German Aerospace Center (DLR), Oberpfaffenhofen, 82234 Wessling, Germany E-mail: {christian.mensing, stephan.sand}@dlr.de
2Aalborg University (AAU), 9220 Aalborg, Denmark 3CEA – Leti Minatec (CEA), 38054 Grenoble Cedex 9, France
4Instituto de Telecomunicações (IT), 3810 Aveiro, Portugal 5University of Surrey (UNIS), GU2 7XH Guildford, United Kingdom
6Universidad Politecnica de Madrid (UPM), 28040 Madrid, Spain 7Université de Rennes 1 (UR1), 35065 Rennes, France
Abstract: This paper presents an overview on the performance of cooperative positioning algorithms evaluated in the WHERE consortium. The novel approaches are analyzed with respect to achievable accuracy and communications aspects. In a centralized approach the cooperative positioning helps to increase the coverage of WiFi based positioning. For the proposed non-centralized scheme, non-parametric belief propagation is used to determine the position of several mobile stations in a distributed way. Finally, various scheduling algorithms – that control the distribution of the information in the network – are analyzed to show the dependency of the achievable accuracy on the underlying communications system and to assess the communications overhead.
Keywords: Cooperative positioning, centralized, distributed, WiFi, communications system, TOA, TDOA, UWB
1. Introduction Services and applications based on very accurate location knowledge of mobile stations (MSs) will play fundamental roles in future wireless systems. Hence, provision and exploitation of MS position information have become very important features of communications systems in recent years [1]. To meet the accuracy and coverage requirements for reliable position estimation, global navigation satellite systems (GNSSs) – like the Global Positioning System (GPS) and the future European Galileo system – can deliver very good position estimates under optimum conditions [2]. However, especially in critical positioning scenarios like urban canyons or indoor environments the performance loss can be very high [3] or GNSS based positioning is even not possible. As solution for “GNSS-free” position estimation, already available communications systems can be included in the MS localization process [1]. Generally, measurements in terms of time of arrival (TOA), time difference of arrival (TDOA), angle of arrival (AOA), or received signal strength (RSS), provided by the anchor nodes (ANs) or the MS can be used. A following hybrid and heterogeneous data fusion (HDF) of these measurements – that also can be provided by different air-interfaces (like UWB, WiFi, 3GPP-LTE) – will give reliable position estimates of the MSs in the network. Investigations in [4][5] have
shown the benefits of this approach for various combinations of measurements and air-interfaces. However, for two-dimensional positioning it is required that the MS can perform measurements with at least three ANs. If links are blocked (e.g., by walls in dense indoor environments) the MS might not be able to determine its position (cf. Figure 1, left hand side). For such situations a cooperative approach (e.g., [6][7]) is recommendable: it can be expected that MSs can communicate via peer-to-peer (P2P) links with each other in future systems. That allows on the one hand the direct exchange of position information between neighboring MSs. On the other hand, these P2P links can be used to derive distance information between these MSs that can be further exploited for position estimation. This cooperative positioning (CP) approach (cf. Figure 1, right hand side) helps to boost the performance in terms of accuracy and coverage compared to conventional HDF techniques. The WHERE consortium [8] develops and investigates CP schemes for various scenarios in terms of positioning as well as communications aspects [9]. Section 2 gives an overview of state-of-the-art CP techniques. Section 3 evaluates the performance of selected centralized and distributed CP approaches proposed by WHERE in different scenarios. Finally, Section 4 discusses the expected impact of the proposed techniques.
Figure 1- Conventional vs. cooperative positioning
2. Cooperative Positioning: Overview and Techniques The concept of CP was first proposed in Japan for acquiring real-time positioning information of mobile robots. This concept, mostly applied nowadays to wireless sensor networks (WSNs), has been recently introduced to heterogeneous communications networks. Some of the aspects present in the WSN context are also present in general communications networks. However, techniques proposed for WSN cannot be straightforwardly extended to mobile communications networks. This is because these networks usually operate in a very complex wireless environment due to many factors such as shadowing, mobility, communications infrastructure, or multiple air-interfaces. Hence, the heterogeneity of today’s wireless communication networks can be seen as an additional problem to be addressed. For example in [10], user cooperation was exploited in a least squares framework, where cellular and ad-hoc links are combined in a single module of the system. Instead, in [11][12] common Bayesian filtering approaches (in terms of Kalman filtering), are used for combining different links. In [13], the authors propose a mathematical formulation based on the absolute position obtained by a cellular system followed by a routine of optimization that uses the information from the short-range links.
An extensive overview of CP techniques discussed under the framework of Bayesian inference can be found in [6]. In principle, we can distinguish between two different procedures: in the centralized approach of CP (e.g., [7]) it is assumed that all information (i.e., the measurements collected by the MSs) is provided to one central entity. That could be a location server in a cellular communications system. There, the measurements are jointly processed and the position for each MS in the network is determined. Afterwards, this information can be exploited in the network or sent back to the MSs. As all measurements are processed jointly in this approach, it is the optimum procedure from a position estimation accuracy point of view. However, drawback is that all measurements have to be collected at a central entity in advance. So as to cope with scalability in dense large-scale networks or for MS-centric applications using restricted infrastructure, the distributed CP approach can also be favoured as an alternative to centralized methods (e.g., [6]). Here, the MSs have only the information available that they obtain from their neighbors via P2P links and the measurements with the ANs. Hence, the position estimation complexity is distributed among the MSs. Generally, the communications overhead and extra-signalling is higher for cooperative approaches than for conventional (non-cooperative) positioning. Hence, signal-processing complexity and training/signalling overhead are two key problems for existing CP schemes. This problem can be significant for a wireless network accommodating a large number of MSs. Therefore, an efficient CP scheme should achieve the best trade-off between communications overhead and position estimation performance.
3. Cooperative Positioning: Simulation Results
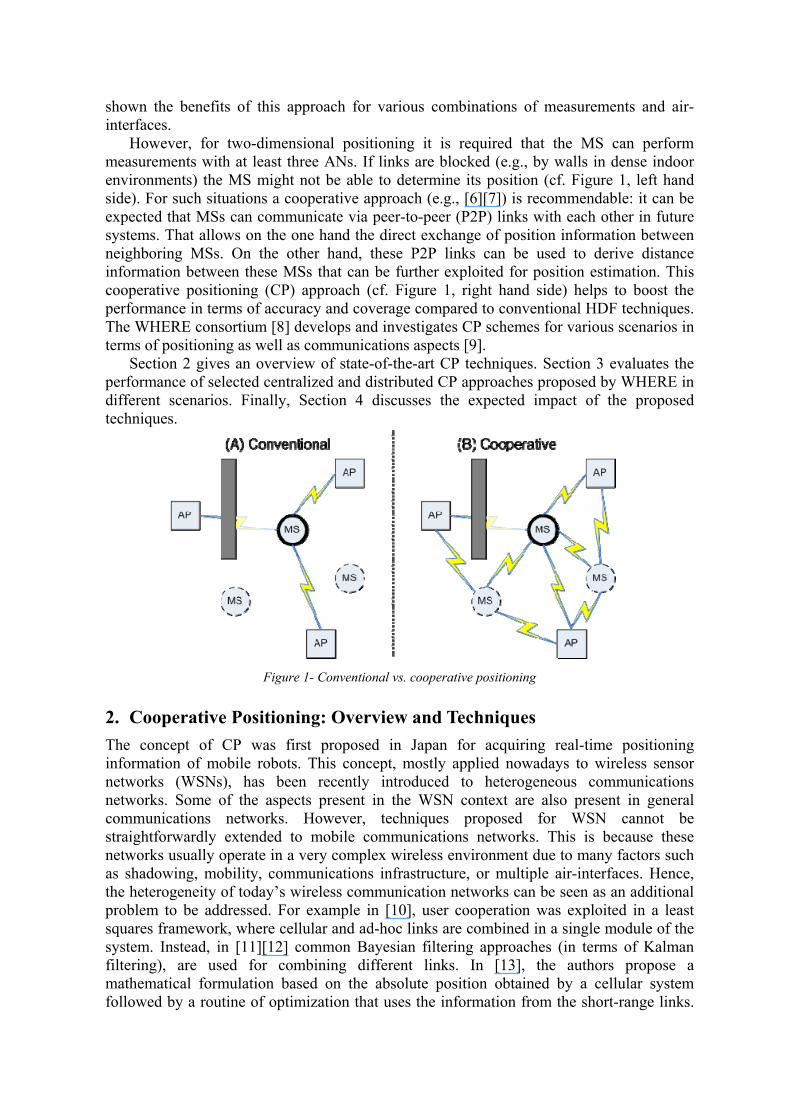
3.1 Centralized Approach We focus on a scenario, where a WiFi system providing RSS measurements is complemented by a wide-range cellular network with base stations (BSs) providing TDOA measurements. We generate 10 users that can interact and exchange information moving over an area of 100m x 100m according to a random walk mobility model. The WiFi hotspots are randomly placed with 200 hotspots/km² and a random coverage radius between 20m and 50m, i.e., around two WiFi ANs can be received in average. The error model for the RSS measurements from the WiFi network is based on ranging with a zero-mean Gaussian error with standard deviation of 10m. For the BSs, we assume TDOA measurements that have single link errors being zero-mean Gaussian distributed with a standard deviation of 100m. The P2P interaction between the users is realized by a short-range communications system. Two users can interact with each other if the true distance between them is smaller than a threshold distance (here: 10m). The communication between the users is assumed to be perfect, i.e., no transmission errors occur and instantaneous exchange is possible. Additionally, the users are allowed to perform ranging via their P2P interface. This can be realized in terms of round trip time (RTT) or RSS measurements. We assume ranging with zero-mean Gaussian errors with standard deviation of 1m for these measurements. Figure 2 shows the visibility of the WiFi ANs for one user over time depending on the MS position and the coverage of the ANs. For this realization the number of visible ANs varies between one and two. For the cellular network coverage, we assume that signals from three BSs can always be received at the MS. Additionally, the figure shows the time-variant number of other users that are in the coverage area of the user of interest. We
observe that between zero and five other users position information can be exchanged and obtained for this realization. They are suitable candidates for CP. Figure 3 shows the cumulative distribution function (CDF) for different set-ups. We assume that an extended Kalman filter (EKF) for joint CP and tracking of all users exists in a central network entity. For WiFi-only positioning we achieve positioning errors smaller than 20m in 53% of the situations (mainly due to the limited WiFi coverage in this scenario). If we include the ability of CP, the performance increases such that the errors are smaller than 20m in 80% of the situations. If we include additional TDOA measurements from a cellular system for the “global coverage”, we achieve in 95% of the situations errors smaller then 20m for the conventional (non-cooperative) EKF. If we include the CP feature, this can be increased to more than 99% for this specific scenario.
0 10 20 30 40 500
1
2
3
4
5
6
7
8
9
10
Time−step of track
Num
ber
of v
isib
le s
ourc
es
WiFi ANsBSsOther MSs for CPWiFi ANs + BSs + CP
Figure 2 - Visibility of different sources
0 20 40 60 80 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
error [m]
CD
F(e
rror
)
WiFiWiFi + cellular systemWiFi, CPWiFi + cellular system, CP
Figure 3 - CP for centralized WiFi+TDOA positioning
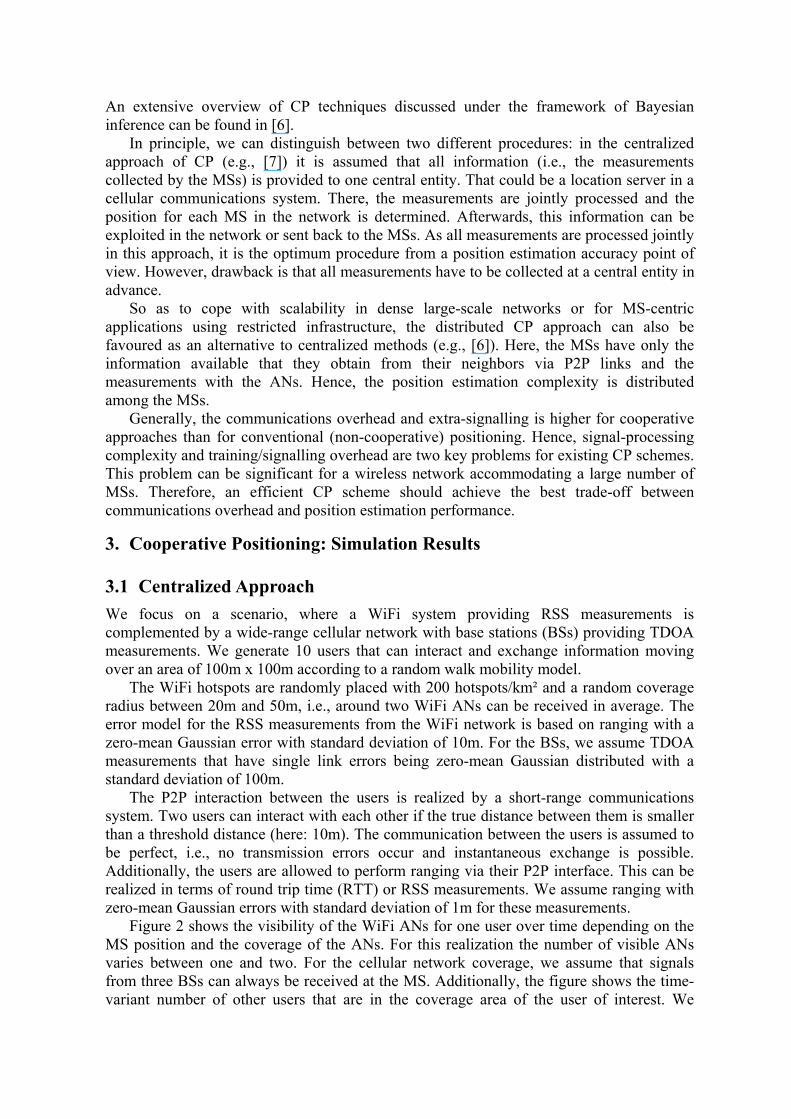
3.2 Distributed Approach Centralized algorithms utilize a single central processor to collect all the individual measurements, while distributed algorithms rely on self-localization of each node in the network using the neighborhood information it collects from its neighbors. The goal followed in the proposed approach is to estimate the maximum-a-posteriori sensor location using a set of observations (usually distances) and a-priori probability distributions of locations of unknown nodes. We will show results with particle based approximation of belief propagation, called non-parametric belief propagation (NBP). This procedure is naturally distributed through the network (e.g., [14]). Furthermore, NBP allows applying a general and flexible statistical formulation, so we can capture the complex uncertainties which occur in the localization process. For example, in a bimodal or multimodal case, this technique could provide probabilities of all possible locations, whereas using a deterministic technique would require that node to be removed from the network, leaving it unlocated or only with initial estimate. A bimodal problem occurs for instance, if one node is connected with less than three neighbors, so it cannot obtain its belief precisely. For example, in the network depicted in Figure 4 node 4 has just two neighbors, so in case we use only the directly connected neighbors (one-step neighbors), the result will be highly erroneous, due to the bimodal belief. An extension to include two-step neighbors can resolve this problem remarkably [9]. On the other hand, statistical models do not work well in graphs with loops. In this case there is no guarantee for convergence of location estimates within a finite number of iterations. A larger network with 50 MSs within a normalized area of 4 dmax2 has also been considered. In that area, 10 ANs provide distance or range information with an error being
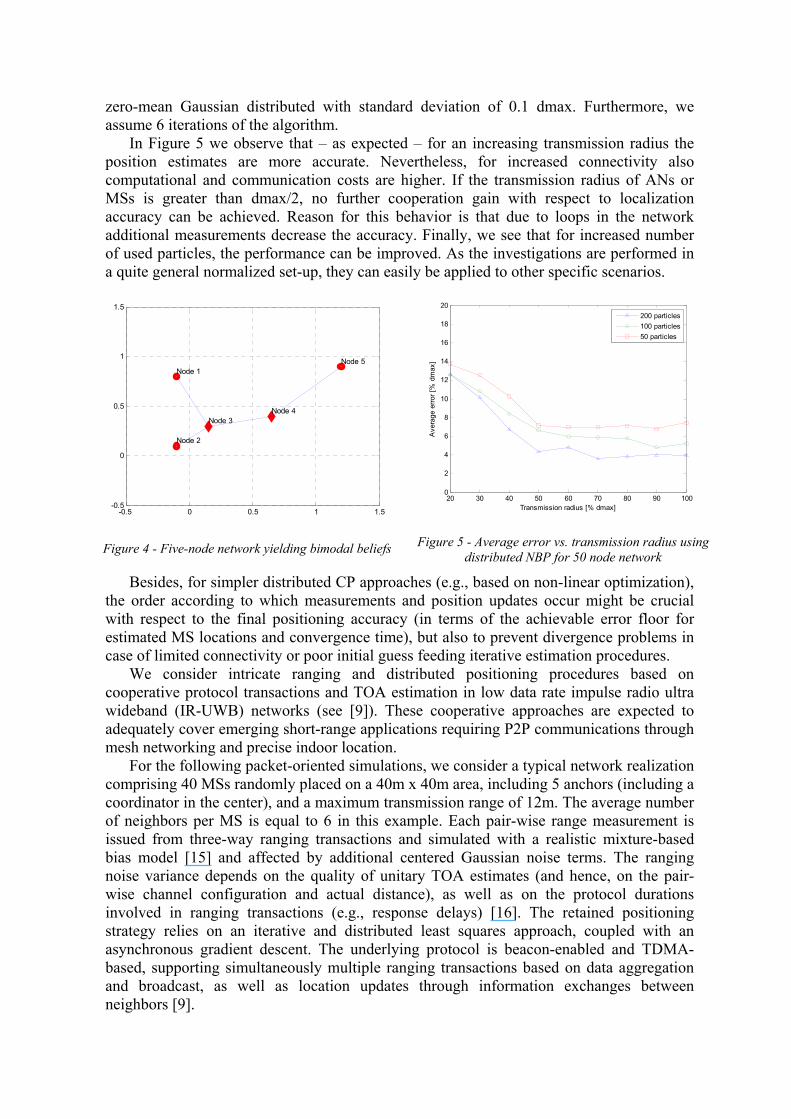
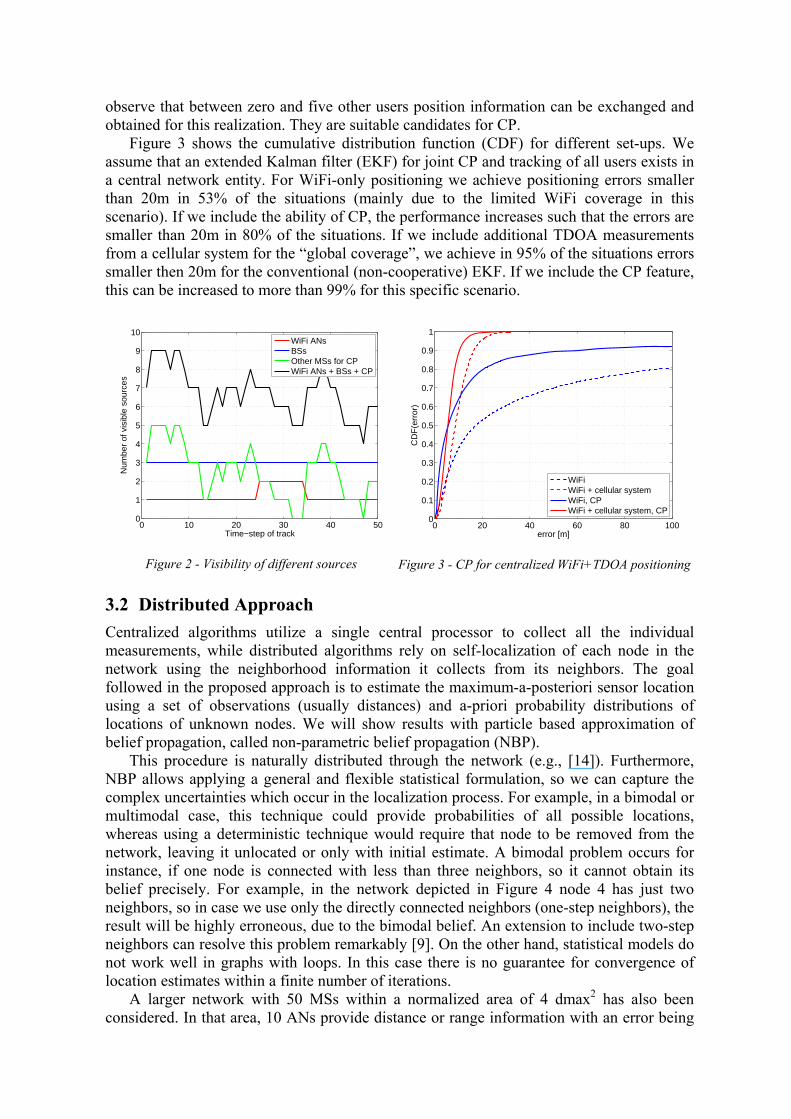
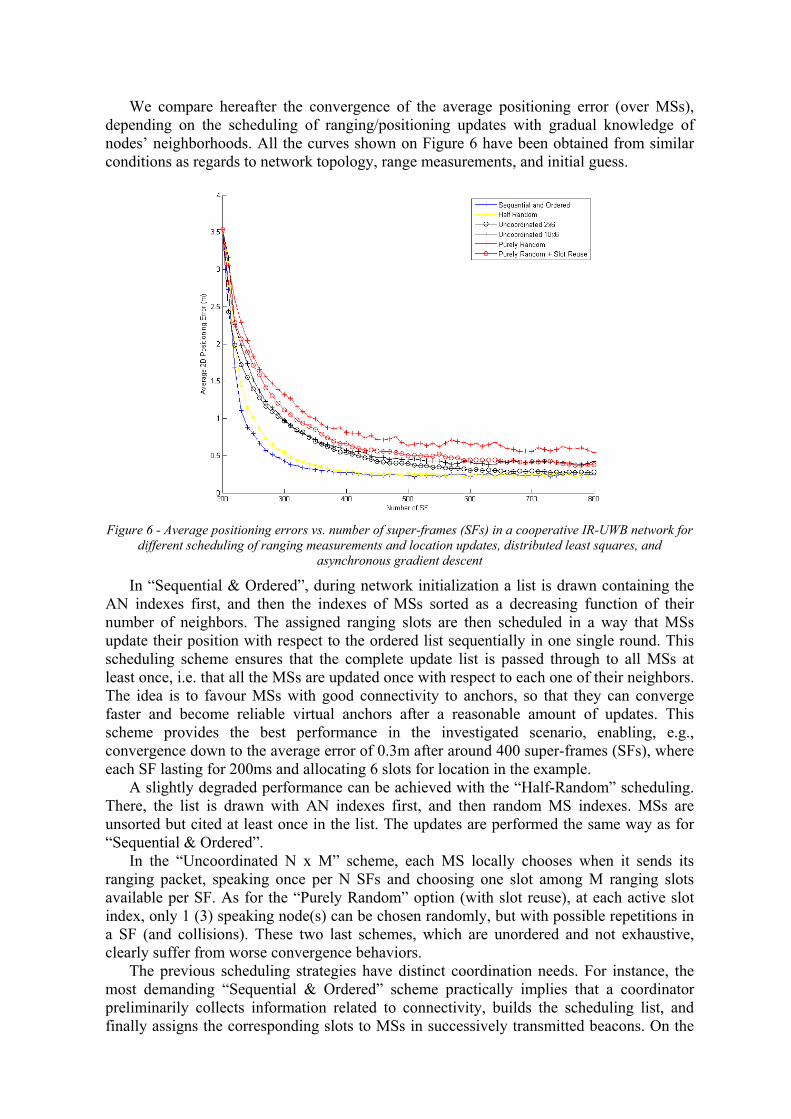
zero-mean Gaussian distributed with standard deviation of 0.1 dmax. Furthermore, we assume 6 iterations of the algorithm. In Figure 5 we observe that – as expected – for an increasing transmission radius the position estimates are more accurate. Nevertheless, for increased connectivity also computational and communication costs are higher. If the transmission radius of ANs or MSs is greater than dmax/2, no further cooperation gain with respect to localization accuracy can be achieved. Reason for this behavior is that due to loops in the network additional measurements decrease the accuracy. Finally, we see that for increased number of used particles, the performance can be improved. As the investigations are performed in a quite general normalized set-up, they can easily be applied to other specific scenarios.
-0.5 0 0.5 1 1.5-0.5
0
0.5
1
1.5
Node 1
Node 2
Node 3Node 4
Node 5
Figure 4 - Five-node network yielding bimodal beliefs
20 30 40 50 60 70 80 90 1000
2
4
6
8
10
12
14
16
18
20
Transmission radius [% dmax]
Ave
rage
erro
r [%
dm
ax]
200 particles100 particles50 particles
Figure 5 - Average error vs. transmission radius using distributed NBP for 50 node network
Besides, for simpler distributed CP approaches (e.g., based on non-linear optimization), the order according to which measurements and position updates occur might be crucial with respect to the final positioning accuracy (in terms of the achievable error floor for estimated MS locations and convergence time), but also to prevent divergence problems in case of limited connectivity or poor initial guess feeding iterative estimation procedures. We consider intricate ranging and distributed positioning procedures based on cooperative protocol transactions and TOA estimation in low data rate impulse radio ultra wideband (IR-UWB) networks (see [9]). These cooperative approaches are expected to adequately cover emerging short-range applications requiring P2P communications through mesh networking and precise indoor location. For the following packet-oriented simulations, we consider a typical network realization comprising 40 MSs randomly placed on a 40m x 40m area, including 5 anchors (including a coordinator in the center), and a maximum transmission range of 12m. The average number of neighbors per MS is equal to 6 in this example. Each pair-wise range measurement is issued from three-way ranging transactions and simulated with a realistic mixture-based bias model [15] and affected by additional centered Gaussian noise terms. The ranging noise variance depends on the quality of unitary TOA estimates (and hence, on the pair-wise channel configuration and actual distance), as well as on the protocol durations involved in ranging transactions (e.g., response delays) [16]. The retained positioning strategy relies on an iterative and distributed least squares approach, coupled with an asynchronous gradient descent. The underlying protocol is beacon-enabled and TDMA-based, supporting simultaneously multiple ranging transactions based on data aggregation and broadcast, as well as location updates through information exchanges between neighbors [9].
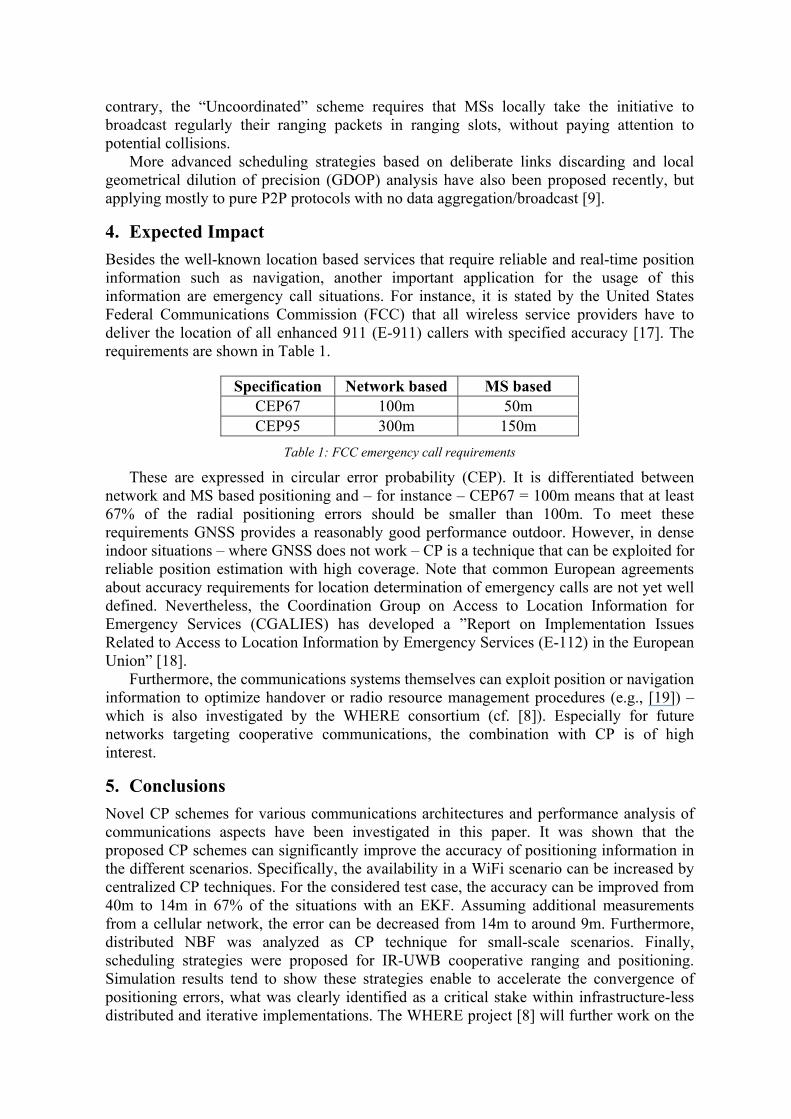
We compare hereafter the convergence of the average positioning error (over MSs), depending on the scheduling of ranging/positioning updates with gradual knowledge of nodes’ neighborhoods. All the curves shown on Figure 6 have been obtained from similar conditions as regards to network topology, range measurements, and initial guess.
Figure 6 - Average positioning errors vs. number of super-frames (SFs) in a cooperative IR-UWB network for
different scheduling of ranging measurements and location updates, distributed least squares, and asynchronous gradient descent
In “Sequential & Ordered”, during network initialization a list is drawn containing the AN indexes first, and then the indexes of MSs sorted as a decreasing function of their number of neighbors. The assigned ranging slots are then scheduled in a way that MSs update their position with respect to the ordered list sequentially in one single round. This scheduling scheme ensures that the complete update list is passed through to all MSs at least once, i.e. that all the MSs are updated once with respect to each one of their neighbors. The idea is to favour MSs with good connectivity to anchors, so that they can converge faster and become reliable virtual anchors after a reasonable amount of updates. This scheme provides the best performance in the investigated scenario, enabling, e.g., convergence down to the average error of 0.3m after around 400 super-frames (SFs), where each SF lasting for 200ms and allocating 6 slots for location in the example. A slightly degraded performance can be achieved with the “Half-Random” scheduling. There, the list is drawn with AN indexes first, and then random MS indexes. MSs are unsorted but cited at least once in the list. The updates are performed the same way as for “Sequential & Ordered”. In the “Uncoordinated N x M” scheme, each MS locally chooses when it sends its ranging packet, speaking once per N SFs and choosing one slot among M ranging slots available per SF. As for the “Purely Random” option (with slot reuse), at each active slot index, only 1 (3) speaking node(s) can be chosen randomly, but with possible repetitions in a SF (and collisions). These two last schemes, which are unordered and not exhaustive, clearly suffer from worse convergence behaviors. The previous scheduling strategies have distinct coordination needs. For instance, the most demanding “Sequential & Ordered” scheme practically implies that a coordinator preliminarily collects information related to connectivity, builds the scheduling list, and finally assigns the corresponding slots to MSs in successively transmitted beacons. On the
contrary, the “Uncoordinated” scheme requires that MSs locally take the initiative to broadcast regularly their ranging packets in ranging slots, without paying attention to potential collisions. More advanced scheduling strategies based on deliberate links discarding and local geometrical dilution of precision (GDOP) analysis have also been proposed recently, but applying mostly to pure P2P protocols with no data aggregation/broadcast [9].
4. Expected Impact Besides the well-known location based services that require reliable and real-time position information such as navigation, another important application for the usage of this information are emergency call situations. For instance, it is stated by the United States Federal Communications Commission (FCC) that all wireless service providers have to deliver the location of all enhanced 911 (E-911) callers with specified accuracy [17]. The requirements are shown in Table 1.
Specification Network based MS based
CEP67 100m 50m CEP95 300m 150m
Table 1: FCC emergency call requirements
These are expressed in circular error probability (CEP). It is differentiated between network and MS based positioning and – for instance – CEP67 = 100m means that at least 67% of the radial positioning errors should be smaller than 100m. To meet these requirements GNSS provides a reasonably good performance outdoor. However, in dense indoor situations – where GNSS does not work – CP is a technique that can be exploited for reliable position estimation with high coverage. Note that common European agreements about accuracy requirements for location determination of emergency calls are not yet well defined. Nevertheless, the Coordination Group on Access to Location Information for Emergency Services (CGALIES) has developed a ”Report on Implementation Issues Related to Access to Location Information by Emergency Services (E-112) in the European Union” [18]. Furthermore, the communications systems themselves can exploit position or navigation information to optimize handover or radio resource management procedures (e.g., [19]) – which is also investigated by the WHERE consortium (cf. [8]). Especially for future networks targeting cooperative communications, the combination with CP is of high interest.
5. Conclusions Novel CP schemes for various communications architectures and performance analysis of communications aspects have been investigated in this paper. It was shown that the proposed CP schemes can significantly improve the accuracy of positioning information in the different scenarios. Specifically, the availability in a WiFi scenario can be increased by centralized CP techniques. For the considered test case, the accuracy can be improved from 40m to 14m in 67% of the situations with an EKF. Assuming additional measurements from a cellular network, the error can be decreased from 14m to around 9m. Furthermore, distributed NBF was analyzed as CP technique for small-scale scenarios. Finally, scheduling strategies were proposed for IR-UWB cooperative ranging and positioning. Simulation results tend to show these strategies enable to accelerate the convergence of positioning errors, what was clearly identified as a critical stake within infrastructure-less distributed and iterative implementations. The WHERE project [8] will further work on the

approaches proposed in this paper and investigate their performance with refined sensor accuracy and mobility models as well as improved communications strategies.
6. Acknowledgment This work has been performed in the framework of the ICT project ICT-217033 WHERE, which is partly funded by the European Union.
References [1] A.H. Sayed, A. Tarighat, and N. Khajehnouri, “Network-Based Wireless Location,” IEEE Signal
Processing Magazine, July 2005. [2] P. Misra and P. Enge, “Global Positioning System: Signals, Measurements, and Performance,” Ganga-
Jamuna Press, 2004. [3] R. Ercek, P. De Doncker, and F. Grenez, “Study of Pseudo-Range Error Due to Non-Line-of-Sight-
Multipath in Urban Canyons,” Proceedings of ION GNSS, September 2005. [4] S. Sand, C. Mensing, M. Laaraiedh, B. Uguen, B. Denis, S. Mayrargue, M. Garcia, J. Casajus, D. Slock,
T. Pedersen, X. Yin, G. Steinboeck, and B. H. Fleury, “Performance Assessment of Hybrid Data Fusion and Tracking Algorithms,” Proceedings of the ICT Mobile Summit, Santander, Spain, June 2009.
[5] WHERE Project, ICT-217033, Deliverable D2.1, “Performance assessment of hybrid data fusion and tracking algorithms,” December 2008.
[6] H. Wymeersch, J. Lien, and M. Z. Win, “Cooperative localization in wireless networks,” Proceedings of the IEEE, February 2009.
[7] C. L. F. Mayorga, F. della Rosa, S. A. Wardana, G. Simone, M. C. N. Raynal, J. Figueiras, and S. Frattasi, “Cooperative Positioning Techniques for Mobile Localization in 4G Cellular Networks,” Proceedings of the IEEE International Conference on Pervasive Services, July 2007.
[8] WHERE project, http://www.ict-where.eu. [9] WHERE Project, ICT-217033, Deliverable D2.2, “Cooperative Positioning,” March 2009. [10] S. Frattasi, “Link Layer Techniques Enabling Cooperation in Fourth Generation Wireless Networks,”
PhD dissertation, Aalborg University, September 2007. [11] S. Frattasi and J. Figueiras, “Ad-Coop Positioning System: Using an Embedded Kalman Filter Data
Fusion,” CRC Press, 2007. [12] J. Figueiras, “Accuracy Enhancements for Positioning of Mobile Devices in Wireless Communication
Networks,” PhD dissertation, Aalborg University, Jan. 2008. [13] C. Qimei, J. Liu, T. Xiaofeng, and Z. Ping, “A Novel Location Model for 4G Mobile Communication
Networks,” Proceedings of the IEEE Vehicular Technology Conference (VTC) Fall, September 2007. [14] A. T. Ihler, J. W. Fisher III, R. L. Moses, A. S. Willsky, “Nonparametric Belief Propagation for Self-
Localization of Sensor Networks,” IEEE Journal on Selected Areas in Communications, April 2005. [15] G. Destino, G. T. F. de Abreu, D. Macagnano, B. Denis, and L. Ouvry, “Localization and Tracking for
LDR-UWB Systems,” Proceedings of the IST Mobile and Wireless Summit July 2007. [16] B. Denis, M. Maman, and L. Ouvry, “Overhead and Sensitivity to UWB Ranging Models within a
Distributed Bayesian Positioning Solution,” Proceedings of ICUWB, September 2007. [17] Federal Communications Commission (FCC), “FCC 99-245: Third Report and Order,”
http://www.fcc.gov/911/enhanced/, October 1999. [18] Coordination Group on Access to Location Information for Emergency Services (CGALIES), “Final
Report: Report on Implementation Issues Related to Access to Location Information by Emergency Services (E112) in the European Union,” http://www.telematica.de/cgalies/, February 2002.
[19] M. Hildebrand, G. Cristache, K. David, and F. Fechter, “Location-Based Radio Resource Management in Multi Standard Wireless Network Environments,” Proceedings of the IST Mobile & Wireless Communications Summit, June 2002.





























