Embed Size (px)
Citation preview

Abstract— This paper addresses the operator-task attention allocation problem in multiple operators managing multiple unmanned aerial vehicles (MOMU) setting. Previous works related to UAV operator-task attention allocation are mainly focused on single operator single UAV (SOSU) or single operator multiple UAVs (SOMU) models with emphasis on reward maximization only. Present research addresses two important issues viz. multi-operator paradigm, and workload imbalance in MOMU task attention allocation problem. Assigning multiple operators to multiple UAVs can improve the flexibility of human-system decision making. This added flexibility comes at a cost of added modeling complexity. Specifically, we consider important issue of operator workload imbalance in a team setting. We model workload imbalance in MOMU setting and through computational simulations show a balance between reward maximization and operators’ workload minimization is possible.
I. INTRODUCTION
The technological advancement in UAV design has lead to the burgeoning usage of UAVs in civil and armed forces operations [1-3]. For example, Department of Defense (DoD) has shown interest in complex UAVs missions by deploying gorgon stare program for UAVs [3]. With the ever-growing usage of Unmanned Aerial Vehicles (UAVs), the human UAV operators are inundated with data coming from network of UAVs. The capability of current generation UAVs (MQ-9 reaper, Gorgon Stare, etc.) in capturing terabytes of data poses challenge to the operator performance and decision making ability [4]. The operators are now considered to be the high-level mission commanders responsible for wide array of tasks. Given the complexity of missions, paradigm is shifting from single operator managing single (SOSU) or multiple UAVs (SOMU) towards multi operator managing multi UAVs (MOMU) concept.
A key question in mixed human-system (like SOMU and MOMU mode of operation) decision making that needs to be answered is the understanding of which tasks the operator should attend to and when. This is known as Attention Allocation Problem (AAP). In order to successfully field MOMU mode of operation in civilian and military operations, one needs to enable effective attention allocation in a team setting. Most of the current research work is limited to SOSU and SOMU attention allocation problems
Authors are with Design Analytics and Research Technology (DART) Lab, Department of Mechanical and Aerospace Engineering, University at Buffalo, Buffalo, NY-14260. Email any correspondences to [email protected]
AAPs [4-7 and references therein] and are inadequate to model MOMU mode of operations. Moreover, the modeling approaches discussed in the literature are gleaned from the machine scheduling perspective which relies on certain assumptions such as infinite working capacity of the operators, and tasks independency [4-7]. An important issue that one needs to consider in team setting is that of operator workload imbalance. Workload imbalancing implies that tasks are assigned to operators such that sufficient workload is allocated to operators to avoid idle time (or over time). The underlying objective in machine scheduling framework to model AAPs is to maximize reward [5]. If one just focuses on reward maximization in a team setting (illustrative example in next section), there is high likelihood that different operators in a team will either be under-loaded or over-loaded. This according to the well-known Yerkes-Dodson based workload-performance law (curve) will lead to poor performance of each operator and hence the overall team (Figure 1) [8].
Figure 1. Need for a new modeling paradigm.
Thus, a different modeling approach that also accounts for workload imbalance is required for MOMU mode of operation. As mentioned in Ref. [6], the increased size of imagery and video data captured by UAVs will restrict the tasks to be accomplished in a timely manner. Thus, the most critical tasks should be handled first. In addition maximization of total rewards (based on the rational decision theory i.e. the rational subjects will always seek to maximize their reward) is also important. The new modeling approach should encapsulate factors such as team setting, task importance, reward maximization, and workload in deciding which tasks to be performed first. The contribution of the present work is twofold, i.e., (1) modeling the MOMU attention allocation problem using machine loading concept
Modeling Multi Operator-Multi-UAV (MOMU) Operator Attention Allocation Problem Anoop Verma and Rahul Rai

(different from machine scheduling concept) [9-10], and (2) incorporating operator workload imbalance in the formulation (in addition to maximization of total rewards).
The paper is organized as follows. In section II, an illustrative example related with MOMU concept is presented. The modeling of the MOMU task attention allocation problem (AAP) is presented in section III. The stochastic MOMU AAP problem along with the simulation results are presented in section IV. Section V concludes the present work with topics for future research.
II. MOMU AAP ILLUSTRATIVE EXAMPLE
Assigning multiple operators to multiple UAVs can improve the flexibility of human-system decision making. This added flexibility comes at a cost of added modeling complexity. Specifically, one needs to consider the issue of workload imbalance in a team setting. Following illustrative example delineates the role of workload imbalance in MOMU AAPs.
Consider a sample MOMU problem with 3 UAVs generating 8 tasks (i.e. images). There are total 3 operators available to process (i.e., target detection) the tasks. Assuming, the time taken by the operator to process the tasks is known, i.e. task1=10min, task2=5min, task3=10min, task4=15min, task5=30min, task6=15, task7=10, and task8=3min, whereas, the reward for each task is also known in advance (task1=5.4, task2=7.5, task3=2.5, task4=10.2, task5=11.5, task6=8.3, task7=9.1, and task8=1.1). Each operator has 40 min of time available to perform the task, overtime is considered. Aim is to allocate the operators to the tasks in such a way that their reward values are maximized, while keeping the workload balanced.
Figure 2 compares the operator attention allocation of two cases. Case 1 is similar to machine scheduling based operator attention allocation reported in the literature [5], where, operators seek to maximize their reward only. Case 2 represents our concept of including both workload balance and reward for operator attention allocation. Assuming high reward tasks will be processed first, and so on. The task allocation begins with equal propensity of allocating a task to any of the three operators. Thus, in both cases, initially, operators 1, 2, 3 are randomly selected to pick the high reward tasks, i.e., task 5, task 7, and task 4 respectively. After processing their first tasks, the feedback is sent to task queue for future attention allocation. In case 1, operator 1 is the most preferred operators, as it has better reward history. In doing so, operator 1 is consistently selected for the high reward tasks, resulting in overloading of work. Whereas, operator 2, 3 are idle most of the time. With the available working time, team was able to get a total reward equivalent to 55.6 units. However, the workload imbalance was 52 minutes, i.e. |40-55|+|40-23|+|40-20|.
In case 2, operators’ available time is also considered along with their accumulated reward history. Operator 2 is preferred over operator 1 for the next available task (i.e. task 6) as it has a better balance of available time and reward history. Same criteria are used for allocating the remaining tasks to the operators. In case 2, the total reward was similar to the case (1), i.e. 55.6 units, but the workload imbalance was reduced to 22 minutes, i.e. |40-33|+|40-30|+|40-35|.
Figure 2. Operator-task allocation.
Implication on operators’ performance:
In order to get a better insight about the role of workload balance, the results for both cases are superimposed on well-known Yerkes-Dodson curve, also known as workload-performance curve. For the example problem, the total search time is 98 minutes (sum of individual task search times). With 3 operators, the balanced workload will be when each operator are utilized equally (i.e. 98/3=32.66 minutes approx.). Figure 3 displays the operator attention allocation schedule superimposed on performance-workload curve. Due to overtime and idle time, operators in case 1 will deliver poor performance, when compared with the operators in case 2. In MOMU AAPs settings the performance could be measured as situation awareness, target response rate etc. Thus, the attention allocation schedule generated in Case 2 seems to be an appropriate option in team setting, such as of MOMU task allocation.
Figure 3. Comparison of the operators’ performance based on Yerkes-
Dodson’s curve
III. MOMU TASK ALLOCATION FORMULATION
In summary, the MOMU task allocation problem can be described as: There are total J tasks generated by UAVs that can be assigned to any available operators. Let there be K operators

each with total available time T (i.e. operator working hours). The tasks of the UAVs arrive in a random fashion, along with the random search time of the operators. The problem is to allocate the tasks to the operators in such a way that the overall reward value can be maximized, while the workload imbalance is kept as low as possible.
Modeling the MOMU task allocation problem consists of two parts, namely, (1) task prioritization, and (2) operator task allocation. Due to dynamic nature of the problem, tasks arrive at random. Often due to time constraint, all the tasks cannot be performed by the operators. This necessitates task prioritization. Task prioritization ensures that the most critical tasks are assigned to the operators first. Factors such as tasks arrival time and task criticality play an important role in deciding which task needs to be performed first. In MOMU setting, more than one operator is available to perform any given task, and thus, the most compatible operator among all operators has to be selected to perform the task. Operator having the best performance record will be assigned a given task first. Factors such as workload and reward will also play an important role is deciding the task allocation to the operator. In modeling the MOMU attention allocation problem, following set of assumptions are made. 1. A task is indivisible entity that cannot be divided and
processed simultaneously by multiple operators. 2. An operator can work overtime as long as the total
workload imbalance is non-negative (calculated as sum of remaining available time to the operators at any time horizon).
The overall modeling framework is illustrated in Figure 4. The tasks generated by the UAVs are first sorted based on their criticality. Task is fed into individual operator’s queue after identifying the most compatible operator. Upon completion, operators send feedback about their task that determines the reward and future allocation.
Figure 4. The overall modeling framework
A. Mathematical Formulation Following notations are used in formulating the MOMU task attention allocation problem. (a) Subscripts/superscripts j: Index of tasks (1≤ j≤ J) k: Index of operators (1≤ k≤K) (b) Notations H: Operators working hours. J: Total number of tasks K: Total number of operators.
S: Set of given tasks. Ak: Available time for operator k. Rj: Reward associated with task j. RHk: Reward history of operator k RW-: Set of tasks reinserted into the queue due to negative workload.
kT ʹ′ : Overtime for operator k.
kT ʹ′ʹ′ : Under time for operator k. E [STjk]: Expected search time of operator k in performing task j. E[Δij]: Expected arrival time of task ij. E[Ŕj]: Expected reward for completing the tasks j. W1: Weight associated with available operator time (=0.5). W2: Weight associated with the operator’s reward history (=0.5). (c) Decision variables
⎩⎨⎧
=otherwise
selectedisjtaskifj ,0
,1α
⎩⎨⎧
=otherwise
jtaskperformtoselectedisjoperatorjk ,0
,1β
Following two metrics are considered in this paper (1-2). -Workload imbalance (Ƒ1):
( )∑
=
ʹ′ʹ′+ʹ′K
kkk TT
1
(1)
-Mean reward (Ƒ2): ∑∑∑=
= =
×ʹ′J
jjJ
j
K
kjk
jR
1
1 1
αβ
(2)
The above metrics are measured subjected to following set of constraints: -Positive workload balance: The total workload of the operators must always be a positive quantity. It is calculated as absolute sum of overtime and under time (3).
( )∑
=
≥ʹ′ʹ′+ʹ′K
kkk TT
1
0 (3)
-Unique task routing: Once an operator has been selected to perform certain task, he/she needs to complete it full before considering a new task (4).
∑ ∈∀≤
Kk jk j,0β (4)
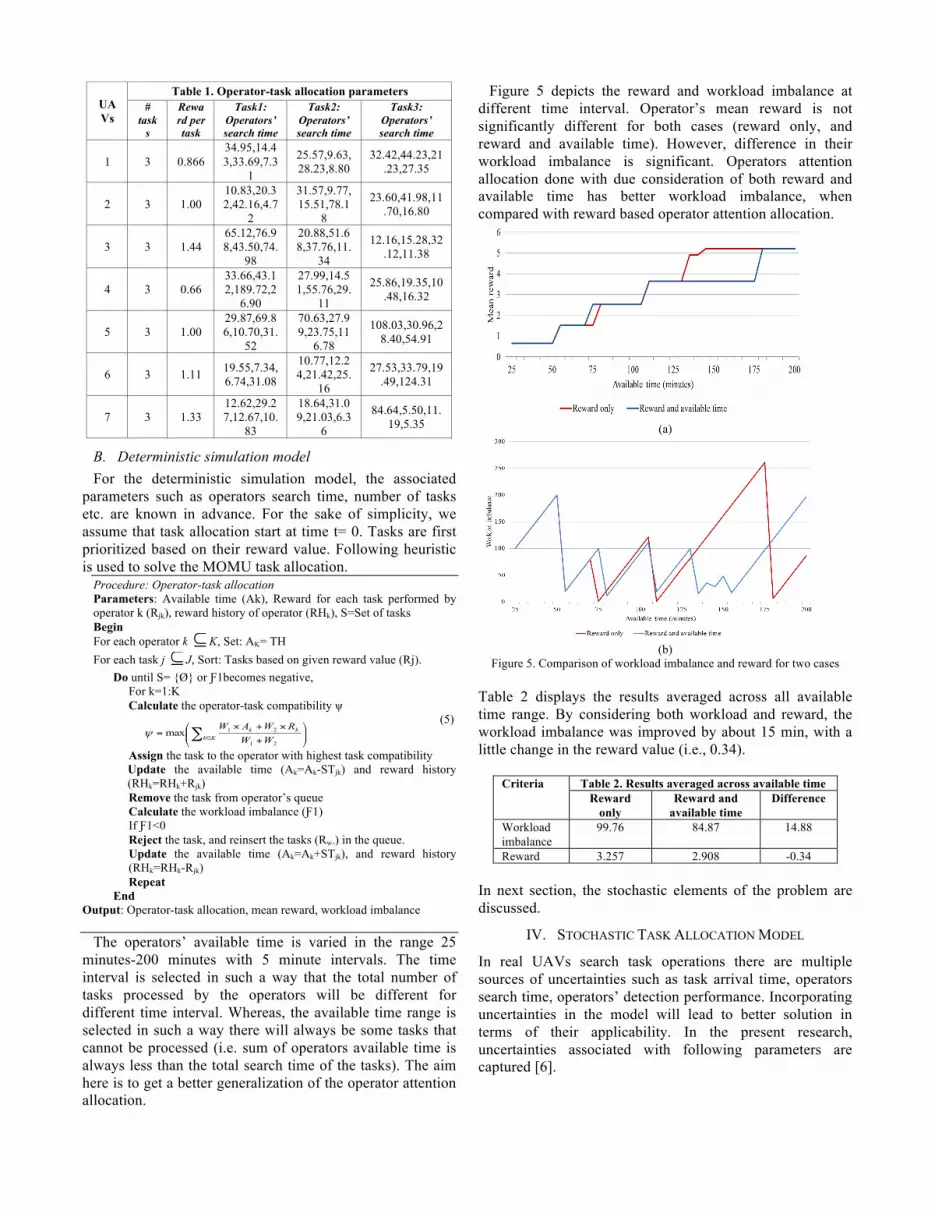
-No task sharing: An individual task cannot be shared among the operators. Example problem: We assume that there are 7 UAVs with 3 tasks at maximum per UAVs. There are 4 operators available to perform the search tasks. Each operator has a fixed time limit within which they should finish the tasks. Search time is known in advance while solving the deterministic model of the problem. Table 1 describes the assumed dataset for the deterministic case. Tasks corresponding to a certain UAV have the similar reward value.
UAVs
Table 1. Operator-task allocation parameters #
tasks
Reward per task
Task1: Operators’ search time
Task2: Operators’ search time
Task3: Operators’ search time
1 3 0.866 34.95,14.43,33.69,7.3
1
25.57,9.63,28.23,8.80
32.42,44.23,21.23,27.35
2 3 1.00 10.83,20.32,42.16,4.7
2
31.57,9.77,15.51,78.1
8
23.60,41.98,11.70,16.80
3 3 1.44 65.12,76.98,43.50,74.
98
20.88,51.68,37.76,11.
34
12.16,15.28,32.12,11.38
4 3 0.66 33.66,43.12,189.72,2
6.90
27.99,14.51,55.76,29.
11
25.86,19.35,10.48,16.32
5 3 1.00 29.87,69.86,10.70,31.
52
70.63,27.99,23.75,11
6.78
108.03,30.96,28.40,54.91
6 3 1.11 19.55,7.34,6.74,31.08
10.77,12.24,21.42,25.
16
27.53,33.79,19.49,124.31
7 3 1.33 12.62,29.27,12.67,10.
83
18.64,31.09,21.03,6.3
6
84.64,5.50,11.19,5.35
B. Deterministic simulation model For the deterministic simulation model, the associated
parameters such as operators search time, number of tasks etc. are known in advance. For the sake of simplicity, we assume that task allocation start at time t= 0. Tasks are first prioritized based on their reward value. Following heuristic is used to solve the MOMU task allocation.
Procedure: Operator-task allocation Parameters: Available time (Ak), Reward for each task performed by operator k (Rjk), reward history of operator (RHk), S=Set of tasks Begin For each operator k ⊆ K, Set: AK= TH For each task j ⊆ J, Sort: Tasks based on given reward value (Rj).
Do until S= {Ø} or Ƒ1becomes negative, For k=1:K
Calculate the operator-task compatibility ψ
⎟⎟⎠
⎞⎜⎜⎝
⎛
+
×+×= ∑ ∈Kk
kk
WWRWAW
21
21maxψ
(5)
Assign the task to the operator with highest task compatibility Update the available time (Ak=Ak-STjk) and reward history (RHk=RHk+Rjk)
Remove the task from operator’s queue Calculate the workload imbalance (Ƒ1) If Ƒ1<0 Reject the task, and reinsert the tasks (Rw-) in the queue.
Update the available time (Ak=Ak+STjk), and reward history (RHk=RHk-Rjk) Repeat
End Output: Operator-task allocation, mean reward, workload imbalance
The operators’ available time is varied in the range 25
minutes-200 minutes with 5 minute intervals. The time interval is selected in such a way that the total number of tasks processed by the operators will be different for different time interval. Whereas, the available time range is selected in such a way there will always be some tasks that cannot be processed (i.e. sum of operators available time is always less than the total search time of the tasks). The aim here is to get a better generalization of the operator attention allocation.
Figure 5 depicts the reward and workload imbalance at different time interval. Operator’s mean reward is not significantly different for both cases (reward only, and reward and available time). However, difference in their workload imbalance is significant. Operators attention allocation done with due consideration of both reward and available time has better workload imbalance, when compared with reward based operator attention allocation.
(a)
(b)
Figure 5. Comparison of workload imbalance and reward for two cases Table 2 displays the results averaged across all available time range. By considering both workload and reward, the workload imbalance was improved by about 15 min, with a little change in the reward value (i.e., 0.34).
Criteria Table 2. Results averaged across available time Reward
only Reward and
available time Difference
Workload imbalance
99.76 84.87 14.88
Reward 3.257 2.908 -0.34 In next section, the stochastic elements of the problem are discussed.
IV. STOCHASTIC TASK ALLOCATION MODEL
In real UAVs search task operations there are multiple sources of uncertainties such as task arrival time, operators search time, operators’ detection performance. Incorporating uncertainties in the model will lead to better solution in terms of their applicability. In the present research, uncertainties associated with following parameters are captured [6].

A. Stochastic parameters -Task start time: Due to individual differences in the UAVs, and search operations, we assumed the tasks are not available at time 0. Tasks arrival rate (λ=5 minutes) is based on the Poisson distribution. In the present work, the total number of tasks is assumed to be known. -Reward value: Even though the rewards associated with the tasks are fixed. Operators get the expected reward based on their task detection probability, similar to ref [6]. The expected reward is a function of search time, and is modeled using a logistic regression (6) [6].
[ ]⎟⎟⎠
⎞⎜⎜⎝
⎛⎥⎦
⎤⎢⎣
⎡+
=
][1exp1
1
2
1jk
jk
STEp
β
β
(6)
Where pjk is the kth operator’s task detection probability for task j. β1, and β2 are the parameters of the regression (β1=-2.3, and β2=-0.037), and E[STjk] is the estimated search time associated with operator k. -Operators search times: Due to individual difference in the operators’ performance, operator search times are estimated based on the lognormal distribution, with estimated mean and variance set equal to 3.1, and 0.6 time units respectively [6]. The mean reward is based on the operators’ task detection probability. Thus, the mathematical formulation (in the deterministic case) is replaced with following equation (7):
E[Ŕj] =
∑∑∑=
= =
⊂∀×××ʹ′J
jjJ
j
K
kjk
jkjkj KkpR
1
1 1
αβ
β (7)
The procedure to calculate the expected mean reward and workload imbalance is same as described in section III. The difference lies in the task prioritization. In the stochastic case, tasks that arrive first are given higher priority (first in first out (FIFO) rule). Figure 5 (a-b) displays the comparison of the results obtained in two cases. Due to random nature of the variables, large scale simulation (1000 runs) is performed. The simulation runs are carried for different time horizons (i.e., operators’ available time). Operators’ available time is varied in such a way that the team time (sum of the available time of all the operators) does not exceed the accumulated search time. The analysis is done for both cases, i.e., operator task allocation based on their reward history, and operator task allocation based on combined information of reward history and available time. To illustrate the applicability of proposed work, the performance of both cases is assessed in following three computational experiments. Experiment 1: Overall team performance at varying time horizon. Experiment 2: Individual operators’ performance at fixed time horizon. Experiment 3: Overall team performance at fixed time horizon.
Experiment 1 Figure 6(a-b) compares the probability density function
(pdf) of workload imbalance and reward for two cases, averaged over 36 different time horizons (operators’ available time). The time horizons are varied at regular time interval of 5 minutes. Kernel density function is selected to estimate the pdfs [11]. The pdf of workload imbalance based on reward only has higher workload imbalance (figure 6(a), compared with the case when both available time and reward is considered (figure 6(a)). The improvement in workload imbalance came at the expense of very slight difference in the reward value, as shown in figure 6(b). As workload is directly related with the performance (from Yerkes-Dodson’s curve), balancing the workload will lead to better performance of the operators, and thus of whole team.
(a)
(b)
Figure 6. The kernel density functions of workload imbalance (a), and reward (b) (averaged over 36 time horizon) for case I and II.
Experiment 2 Another important aspect is to analyze the operator’s
performance at fixed time horizon. In most of the UAV search operations, tasks are generated at higher pace, which needs attention from operators. With such frequent arrival of the tasks, it is quite likely that certain tasks will be missed. Thus, operators seek for the tasks based on certain criteria (such as arrival rate, anticipated reward etc.). Here, a time horizon equivalent to 150 minutes is considered (operators’ available time). The considered time horizon is not enough for the operators to process all 21 tasks considered. Analysis
-20 0 20 40 60 80 100 1200
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
Average workload imbalance
Prob
abili
ty
Reward basedReward and workload based
1.5 2 2.5 3 3.5 4 4.5 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Average expected reward
Prob
abili
ty
Reward onlyReward and available time

on simulation runs reveals that on an average 15-16 tasks can be performed. Thus, in such settings it is important to balance the workload as operators tend to work overtime in order to maximize their own reward. Figure 7 compares the performance of individual operators in such restricted time horizon (1000 simulation runs). The negative workload balance available time in the figure shows the operators’ overtime. The instances of negative workload balance of individual operators are few for both cases (i.e., reward only, and reward and available time). The pdfs of operators’ workload when selected using available time and reward are more peaked (around 0 workload balance) than the operators selected based on reward only. The peakedness of the distribution around zero workload imbalances clearly indicates that operators managed to have a better workload balance.
Experiment 3 Figure 8 compares the overall performance of the whole
team assessed at fixed time horizon (i.e. operators’ available time: 150 minutes ). Quiet similar with the result on average simulation runs, operator-task allocation criteria involving both reward, and available time provides relatively better workload imbalance, without much sacrificing the reward value.
Figure 7. Workload assessment of individual operators (available time: 150
minutes)
V. CONCLUSIONS & FUTURE RESEARCH Present research illustrates a new modeling approach to
MOMU concept with emphasis on workload imbalance minimization. Numerous simulations were performed to demonstrate the role of workload balancing in MOMU operator attention allocation. Analysis was done at three levels to demonstrate the role of workload balance in operator task allocation. Results indicate that incorporating operators’ available time in task allocation problems in MOMU setting leads to a more balanced workload distribution, with minor change in reward.
Present work will be extended in an optimization framework to minimize workload imbalance and maximize expected reward. Also, modeling the present formulation via dynamic programming based control approach is also a topic
for future research.
(a)
(b)
Figure 8. The kernel density functions of workload imbalance (a), and reward (b) (time horizon: 150 minutes).
REFERENCES [1] M.L. Cummings, and S. Bruni, “Collaborative human-automation
decision making,” in Handbook of Automation (S.Y. Nof, ed.), pp. 437-447, Springer, 2009.
[2] M. Tulga and T. Sheridan, “Dynamic decisions and work load in multitask supervisory control,” IEEE Transactions on Systems, Man, and Cybernetics, Vol. 10(5), pp. 217–232, 1980.
[3] M. Hoffman, “New Reaper sensors offer a bigger picture.” http://www.airforcetimes.com/news/2009/02/airforce_WAAS_021609
[4] V.Srivastava, A.Surana, and F. Bullo, “Adaptive attention allocation in human-robot systems,” American control conference (ACC), Montreal, Canada, June 2012.
[5] V.Srivastava, C.Langbort, and F. Bullo, “Attention allocation for decision making queues,” Automatica, Submittted 2012.
[6] L. Bertuccelli and M. Cummings, “Scenario-based robust scheduling for collaborative human-UAV visual search tasks,” Decision and Control, 2011. CDC. 51st IEEE Conference on, IEEE, 2011
[7] L. Bertuccelli, N.W.M. Beckers, and M. Cummings, “Developing operator models for UAV search scheduling,” AIAA guidance navigation and control conference, Aug. 2010, AIAA-2010-7863.
[8] R.M.Yerkes, and J.D.Dodson, “The relation of strength of stimulus to rapidity of habit-formation,” Journal of comparative neurology and psychology, Vol. 18(5), pp. 459-482, 1908.
[9] A. Prakash, N.Khilwani, M.K.Tiwari, and Y.Cohen. “Modified immune algorithm for job selection and operation allocation problem in flexible manufacturing systems,” Advances in Engineering Software, Vol. 39(3), pp. 219-232, 2008.
[10] U. M. B. S. Sarma, S. Kant, R. Rai, and M. K. Tiwari. “Modeling the machine loading problem of FMSs and its solution using a tabu-search-based heuristic,” Int. J. Computer Integrated Manufacturing (IJCIM), Vol. 5(4), pp. 285-295, 2002.
[11] A. W. Bowman, and A. Azzalini. Applied smoothing techniques for data analysis. New York: Oxford University Press, 1997
-400 -200 0 2000
0.005
0.01
Workload imbalance (Operator 1)
Prob
abili
ty
-400 -200 0 2000
0.005
0.01
Workload imbalance (Operator 2)
Prob
abili
ty
-400 -200 0 2000
0.005
0.01
Workload imbalance (Operator 3)
Prob
abili
ty
-400 -200 0 2000
0.005
0.01
0.015
Workload imbalance (Operator 4)
Prob
abili
ty
Reward onlyReward and available time
0 50 100 150 200 250 300 350 400 450 5000
1
2
3
4
5
6
7
8 x 10-3
Workload imbalance
Prob
abili
ty
Reward onlyReward and available time
2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
Expected mean reward
Prob
abili
ty
Reward onlyReward and available time





























