Embed Size (px)
Citation preview

Provided for non-commercial research and educational use only. Not for reproduction, distribution or commercial use.
This chapter was originally published in the book Developments in Environmental Science, Vol. 12, published by Elsevier, and the attached copy is provided by Elsevier for the author's benefit and for the benefit of the author's institution, for non-commercial research and educational use including without limitation use in instruction at your institution, sending it to specific colleagues who know you, and providing a copy to your institution’s administrator.
All other uses, reproduction and distribution, including without limitation commercial reprints, selling or licensing copies or access, or posting on open internet sites, your personal or institution’s website or repository, are prohibited. For exceptions, permission may be sought for such use through Elsevier's permissions site at:
http://www.elsevier.com/locate/permissionusematerial
From: Davide Travaglini, Gherardo Chirici, Francesca Bottalico, Marco Ferretti, Piermaria Corona, Anna Barbati and Lorenzo Fattorini, Large-Scale Pan-European Forest Monitoring
Network: A Statistical Perspective for Designing and Combining Country Estimates. Example for Defoliation. In Marco Ferretti and Richard Fischer, editors: Developments in
Environmental Science, Vol. 12, Oxford, UK, 2013, pp. 105-135. ISBN: 978-0-08-098222-9
© Copyright 2013 Elsevier Ltd. Elsevier

Author's personal copy
Chapter 7
Developments in Environmental Science, Vol. 12. http://dx.doi.org/10.1016/B978-0-
© 2013 Elsevier Ltd. All rights reserved.
Large-Scale Pan-EuropeanForest Monitoring Network:A Statistical Perspective forDesigning and CombiningCountry Estimates. Examplefor Defoliation
Davide Travaglini*,1, Gherardo Chirici{, Francesca Bottalico*, MarcoFerretti{, Piermaria Corona}, Anna Barbati} and Lorenzo Fattorini}*Dipartimento di Economia, Ingegneria, Scienze e Tecnologie Agrarie e Forestali, Universita
degli Studi di Firenze, Firenze, Italy{Dipartimento di Bioscienze e Territorio, Universita degli Studi del Molise, Contrada Fonte
Lappone s.n.c., Pesche, Isernia, Italy{TerraData Environmetrics, Monterotondo Marittimo (GR), Italy}Dipartimento per l’Innovazione dei sistemi Biologici, Agroalimentari e Forestali, Universita
degli Studi della Tuscia, Viterbo, Italy}Dipartimento di Economia Politica e Statistica, Universita degli Studi di Siena, Siena, Italy1Corresponding author: e-mail: [email protected]
Chapter Outline
7.1. Introduction 1067.2. Sampling Designs in
Large-Scale Forest
Monitoring in Europe 107
7.3. Relationship Between
FCM and NFI Networks 110
7.4. Design-Based
European Monitoring
System of Forest
Condition 113
7.4.1. The Importance
of Clear Objectives 113
7.4.2. Defining Parameters
of Concern 115
7.4.3. Defining Accuracy
Measures for Status
Assessment 117
7.4.4. Defining Accuracy
Measures for
Change Assessment 118
08-098222-9.00007-8
105

SECTION II Designing Forest Monitoring106
Author's personal copy
7.5. Sampling Strategies at
the Country Level 119
7.5.1. Uniform Random
Sampling 119
7.5.2. URS Versus
Systematic and
Stratified Sampling 122
7.5.3. Sampling Effort: A
Preliminary Test 125
7.6. Aggregating Country
Estimates at the
European Level 125
7.6.1. Combining FCM
Estimates 127
7.6.2. Coupling FCM
and NFI Estimates
Across Europe 128
7.7. Conclusions 131
References 133
7.1 INTRODUCTION
National Forest Inventories (NFIs) and Forest Condition Monitoring (FCM)
networks are primary data sources for large area assessment of forest
resources. NFIs have been traditionally designed to provide country-based
estimates on the kind, amount, and condition of timber and nontimber forest
resources (Corona et al., 2011); with time, new variables have been included
to meet evolving demands of forest information related to international
conventions and policy process (Vidal et al., 2008). FCM was established
in 1980s in response to the concern of monitoring the alleged progressive
deterioration of forest condition due to atmospheric pollution (Innes, 1993).
In general terms, NFIs and FCM share the same approach: data from sample
surveys are used to estimate population parameters for the attribute(s) of con-
cern and to estimate changes over time.
The International Co-operative Programme on Assessment and Monitoring
of Air Pollution Effects on Forests (ICP Forests) large-scale (Level I, see
Chapters 2 and 6) monitoring network has a European-wide dimension and
the potential for providing forest information to fulfill reporting obligations
under several international agreements (e.g., Ministerial Conference on the
Protection of Forests in Europe-MCPFE, currently Forest Europe; Montreal
processes and for the purposes of forest certification; climate negotiations).
Yet, several authors argue about the quality of the data collected by the ICP
Forests surveys (e.g., Ferretti, 1997, 2004; Innes and Materna, 1992; Innes
et al., 1993; Neumann and Stowasser, 1986; Percy and Ferretti, 2004). Main
criticisms concerned the quality of defoliation assessments, while very few
authors addressed sampling-related issues (e.g., Ferretti, 1997; Ferretti and
Chiarucci, 2003; Innes, 1988; Kohl and Kaufmann, 1993; Percy and
Ferretti, 2004). This latter point, instead, deserves careful attention, as the
sampling approaches adopted by individual countries, which are responsible
for the implementation of Level I, have a significant impact on survey results.

Chapter 7 Large-Scale Pan-European Forest Monitoring Network 107
Author's personal copy
As a matter of fact, the ICP Forests Level I network is a composite of national
networks, based on different sampling schemes (Cozzi et al., 2002). Neverthe-
less, all national sampling schemes are required to follow a probabilistic
sampling design, ensuring, for each element of the population, a nonzero
probability of being selected. The density of sampling units within ICP For-
ests Level I network provides the basis for Europe-wide analysis rather than
for national assessments, which are partly based on denser national grids
(Ferretti et al., 2010a). Although several countries adopt a systematic sam-
pling to select sampling sites, the target population is not homogeneous within
the monitoring network, as different forest definitions are adopted by individ-
ual countries. Moreover, where applied, the so-called cross-cluster plot is sur-
veyed based on a fixed number of nearest trees (UNECE, 1998). As a
consequence, it may be very difficult to achieve statistically sound estimates
of forest condition parameters (e.g., mean defoliation, frequency of trees in
certain defoliation classes) and of their accuracy from the current structure
of ICP Forests surveys. Indeed, differences between countries in the definition
of the target population preclude the achievement of reliable estimates at the
European level. Likewise, the selection of a fixed number of nearest trees
around points precludes the estimation (at least from a design-based perspec-
tive) even at the country level, due to the difficulties in determining the inclu-
sion probabilities of trees, as pointed out by Kleinn and Vilcko (2006).
In this chapter, we will first introduce the main sampling designs that may
be applied in the context of large-scale forest monitoring; second, present the
relationships between FCM and NFI networks; and finally, explore and sug-
gest formal solutions to overcome the problems and drawbacks outlined
above. In this respect, we will move in the framework of design-based infer-
ence: accordingly, we will propose (i) a set of requirements for status and
change assessment and (ii) a harmonized sampling strategy able to provide
unbiased and consistent estimators of forest condition parameters and their
changes at both country and European levels.
7.2 SAMPLING DESIGNS IN LARGE-SCALE FORESTMONITORING IN EUROPE
Collecting data on forests over large areas can hardly cover all stands and
trees as complete enumeration (population census) is too time consuming
and costly. Thus, both forest inventories and forest monitoring systems are
based on data gathered from design-based surveys. Sampling consists of
making observations on parts of the investigated population (the forest and
its characteristics) to obtain estimates that are representative of the parameters
of the population (like volume per hectare or crown defoliation per cent) and
to assess the accuracy of the estimates.
Observations are carried out on sample units whose distribution on the
field is determined according to a sampling design. Multiphase sampling

SECTION II Designing Forest Monitoring108
Author's personal copy
strategies (e.g., Gregoire and Valentine, 2008; Mandallaz, 2008) are common
in many types of forest inventories (for a typology of forest inventories, see
Kohl et al., 2006). However, all design-based inventories over large areas
share a common methodological feature: sample units are objectively selected
by probabilistic rules as a means of guaranteeing the credibility of estimates
(Olsen and Schreuder, 1997). The histories of NFIs show a progressive evolu-
tion toward statistical sampling techniques, with the majority of countries now
using design-based sampling schemes (Lawrence et al., 2010). Similarly, sev-
eral countries participating in the ICP Forests Level I network declared to
adopt a design-based sampling (Cozzi et al., 2002) and the recently updated
monitoring manual also refers to this point (Ferretti et al., 2010a).
Traditionally, forest inventory data are analyzed in the framework of design-
based inference for which population values are regarded as fixed constants and
the randomization distribution resulting from the sampling design is the basis of
inference. In this framework, the bias and variance of an estimator of a popula-
tion parameter are determined from the set of all possible samples (the sample
space) and from the probability associated with each sample. Sarndal et al.
(1992), Gregoire (1998), and Fattorini (2001) provide extensive discussion of
design-based inference and contrast it with model-based inference. Usually, for-
est inventories adopt sampling schemes in which a set of points are randomly
selected from the study region in accordance with a spatial sampling design.
The main sampling designs that may be applied in the context of large-scale
forest monitoring are the Uniform Random Sampling (URS), the Pure System-
atic Sampling (PSS), and the Tessellation Stratified Sampling (TSS). Under the
URS, a set of points is randomly and independently selected in the study area.
URS is the fundamental selection method and all other sampling procedures
are modifications of URS. PSS, which is based on a regular grid of points with
a random start, represents the scheme most commonly adopted by NFIs, and it
has been used by ICP Forests to systematically select Level I plots
(Table 7.1). TSS is a random systematic scheme based on a regular tessellation
of the study area and the random placement of a point in each tessellation unit.
Once the sampling design has been chosen, plots of adequate size are then
established at the selected points, and forest attributes are recorded for the
trees within the plots (Corona, 2010).
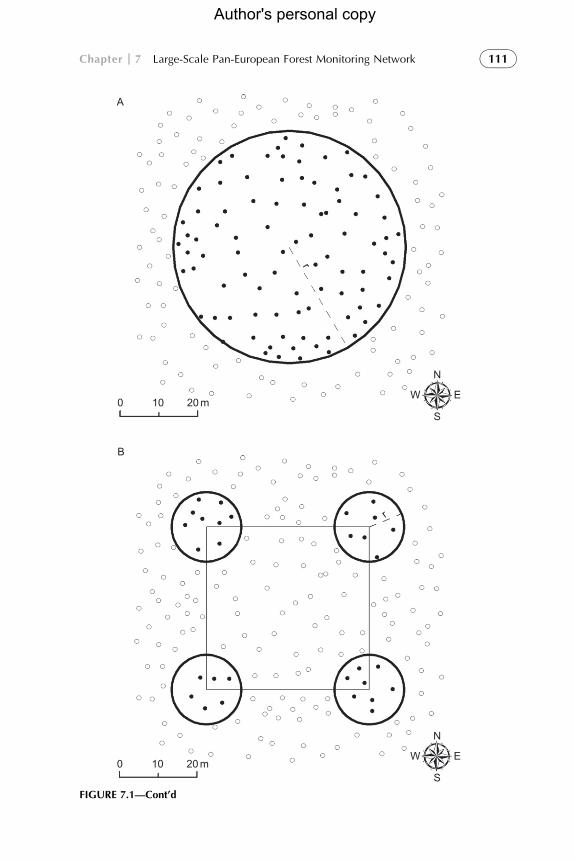
The shape of plots may be square, rectangular, or circular, although tran-
sect and angle count are used too (Figure 7.1). Circular plots are used by most
of European NFIs and many countries use cluster sampling in which multiple
plots (often four plots per cluster or more) are established in close spatial
proximity (Lawrence et al., 2010). Traditionally, on many Level I plots of
the ICP Forests network, a fixed number of nearest trees was customary
selected: for each point falling into a forest, the so-called cross-cluster plot
was performed, in which four further points are established along the direc-
tions N–S and E–W at a distance of 25 m from the central point and on each
point the six nearest trees are selected (UNECE, 1998). Recently, a shift to
fixed-area plot has been suggested (Ferretti et al., 2010a).
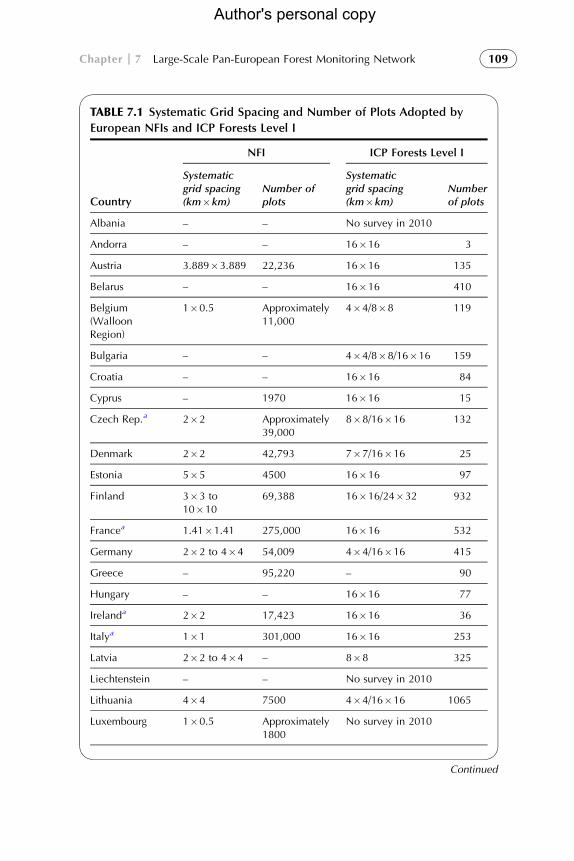
TABLE 7.1 Systematic Grid Spacing and Number of Plots Adopted by
European NFIs and ICP Forests Level I
Country
NFI ICP Forests Level I
Systematicgrid spacing(km�km)
Number ofplots
Systematicgrid spacing(km�km)
Numberof plots
Albania – – No survey in 2010
Andorra – – 16�16 3
Austria 3.889�3.889 22,236 16�16 135
Belarus – – 16�16 410
Belgium(WalloonRegion)
1�0.5 Approximately11,000
4�4/8�8 119
Bulgaria – – 4�4/8�8/16�16 159
Croatia – – 16�16 84
Cyprus – 1970 16�16 15
Czech Rep.a 2�2 Approximately39,000
8�8/16�16 132
Denmark 2�2 42,793 7�7/16�16 25
Estonia 5�5 4500 16�16 97
Finland 3�3 to10�10
69,388 16�16/24�32 932
Francea 1.41�1.41 275,000 16�16 532
Germany 2�2 to 4�4 54,009 4�4/16�16 415
Greece – 95,220 – 90
Hungary – – 16�16 77
Irelanda 2�2 17,423 16�16 36
Italya 1�1 301,000 16�16 253
Latvia 2�2 to 4�4 – 8�8 325
Liechtenstein – – No survey in 2010
Lithuania 4�4 7500 4�4/16�16 1065
Luxembourg 1�0.5 Approximately1800
No survey in 2010
Continued
Chapter 7 Large-Scale Pan-European Forest Monitoring Network 109
Author's personal copy
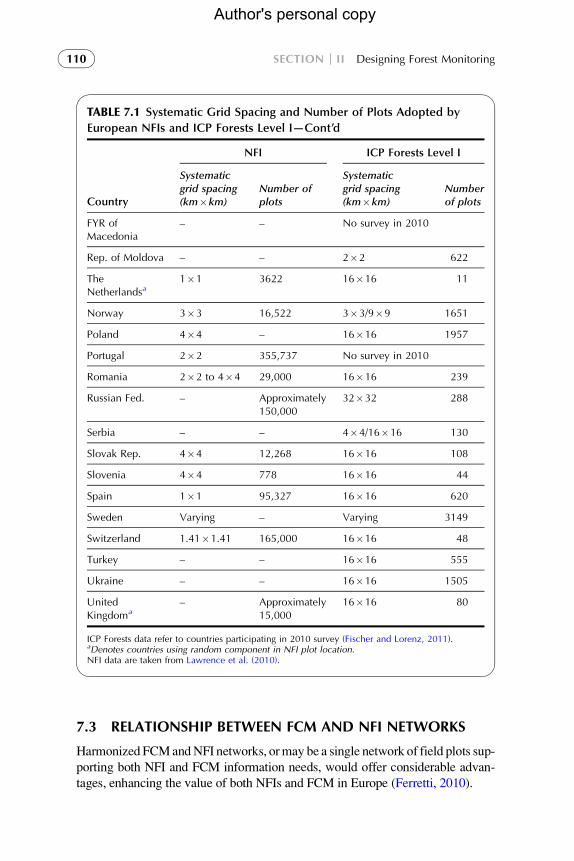
TABLE 7.1 Systematic Grid Spacing and Number of Plots Adopted by
European NFIs and ICP Forests Level I—Cont’d
Country
NFI ICP Forests Level I
Systematicgrid spacing(km�km)
Number ofplots
Systematicgrid spacing(km�km)
Numberof plots
FYR ofMacedonia
– – No survey in 2010
Rep. of Moldova – – 2�2 622
TheNetherlandsa
1�1 3622 16�16 11
Norway 3�3 16,522 3�3/9�9 1651
Poland 4�4 – 16�16 1957
Portugal 2�2 355,737 No survey in 2010
Romania 2�2 to 4�4 29,000 16�16 239
Russian Fed. – Approximately150,000
32�32 288
Serbia – – 4�4/16�16 130
Slovak Rep. 4�4 12,268 16�16 108
Slovenia 4�4 778 16�16 44
Spain 1�1 95,327 16�16 620
Sweden Varying – Varying 3149
Switzerland 1.41�1.41 165,000 16�16 48
Turkey – – 16�16 555
Ukraine – – 16�16 1505
UnitedKingdoma
– Approximately15,000
16�16 80
ICP Forests data refer to countries participating in 2010 survey (Fischer and Lorenz, 2011).aDenotes countries using random component in NFI plot location.NFI data are taken from Lawrence et al. (2010).
SECTION II Designing Forest Monitoring110
Author's personal copy
7.3 RELATIONSHIP BETWEEN FCM AND NFI NETWORKS
Harmonized FCMandNFI networks, ormay be a single network of field plots sup-
porting both NFI and FCM information needs, would offer considerable advan-
tages, enhancing the value of both NFIs and FCM in Europe (Ferretti, 2010).
10 20 m
r
S
E
N
W0
A
10 20 m
r
S
E
N
W
B
0
FIGURE 7.1—Cont’d
Chapter 7 Large-Scale Pan-European Forest Monitoring Network 111
Author's personal copy

10 20 m
L
S
E
N
W
C
0
10 20 m
r1
r2
r3
S
E
N
W0
D
SECTION II Designing Forest Monitoring112
Author's personal copy

Chapter 7 Large-Scale Pan-European Forest Monitoring Network 113
Author's personal copy
At present, the analysis of the relationship between the ICP Forests
Level I and NFIs shows that, in some countries, the ICP Forests and NFI net-
works are coincident while, in some others, the two grids are different for sev-
eral reasons. The most common are as follows:
l NFI and ICP Forests developed separately because they are under the
responsibility of different administrations (e.g., Spain);
l The ICP Forests plots were initially selected as a subsample of the NFI
grid, and then the NFI grid changed and the ICP Forests plots remained
unchanged (e.g., Italy).
Table 7.2 gives an overview of the status of integration between the ICP For-
ests Level I and NFI networks. The results are based on data provided by the
ICP Forests database integrated with an enquiry conducted in 2009–2010. In
most of the countries where integration is under study or where it has been
accomplished, the integration approach is based on the selection of the ICP
Forests plots as a subsample of the NFI network.
7.4 DESIGN-BASED EUROPEAN MONITORINGSYSTEM OF FOREST CONDITION
7.4.1 The Importance of Clear Objectives
Although the recent revision of the ICP Forest Manual (Ferretti et al., 2010b)
emphasizes the need for a formal and operational definition of objectives, this
has never been done for tree condition assessment (e.g., Eichhorn et al., 2010)
and the desired accuracy of the estimates was never addressed. This limits a
proper assessment of the effectiveness of the monitoring program in terms
of achievement of objectives and of cost-benefit. In addition, disregarding
the formal definitions of objectives has the undesired consequence of disre-
garding the field procedures necessary to achieve the objectives. Quantitative
assessment of forest condition parameters and of their changes rests on the
scheme adopted to select the observation sites and trees around selected sites.
In theory, a design-based European forest monitoring system should allow
FIGURE 7.1 Example of sample plot configuration for tree selection. Trees are depicted as
small white circles and sampled trees as small black circles. (A) Configuration of a circular plot
with radius r. (B) Configuration of a cluster with four circular plots of radius r. (C) ICP Forests
Level I plot configuration: the plot has four subplots assembled in a cross-cluster, oriented along
the main compass directions and at a distance L¼25 m from the plot center; on each subplot, the
six nearest trees to the subplot center are selected as sample trees, resulting in a total of 24 sample
trees per plot. (D) Configuration of concentric circular plots with radius r1, r2, and r3,
respectively.

TABLE 7.2 Status of Integration Between NFIs and ICP Forests Level I
Networks
Status of
integration Country Integration approach
None Andorra –
Belgium/Wallonia –
Bulgaria –
Croatia –
Czech Rep. –
France –
Germany (most regions) –
Lithuania –
Montenegro –
Russian Fed. –
Serbia –
Slovak Rep. –
Spain –
The Netherlands –
United Kingdom –
Under study Belgium/Flanders Plot design NFI in ICP Forests
Denmark ICP Forests subsample of NFI
Estonia ICP Forests subsample of NFI
Germany/Baden-Wurttemberg
A slightly modified version of the NFI wasassessed on ICP Forests for the first timein 2006
Ireland ICP Forests and NFI network run inparallel until a time series exists whichallows for the interpretation of trends
Italy Hypothesis of new ICP Forests grid assubsample of NFI. For 1 or 2 years oldICP grid still active to maintain time series
Latvia ICP Forests subsample of NFI
Norway –
SECTION II Designing Forest Monitoring114
Author's personal copy

TABLE 7.2 Status of Integration Between NFIs and ICP Forests Level I
Networks—Cont’d
Status of
integration Country Integration approach
Accomplished Austria ICP Forests subsample of NFI
Belarus –
Finland ICP Forests subsample of NFI
Germany/Bavaria ICP Forests subsample of NFI
Hungary ICP Forests subsample of GrowthMonitoring
Poland ICP Forests subsample of NFI
Romania New NFI plots on ICP Forests
Slovenia ICP Forests subsample of NFI
Sweden ICP Forests subsample of NFI
Switzerland –
Turkey –
Chapter 7 Large-Scale Pan-European Forest Monitoring Network 115
Author's personal copy
(a) the quantitative estimates of the condition attribute of interest (e.g., pro-
portion of trees with defoliation >25%) for the target statistical population
(e.g., the whole population of forest trees) and for defined subgroups (e.g.,
the beech trees) at a specified level of accuracy for each country and at the
European level; (b) the quantitative estimates of change for the condition of
the attribute of interest at both country and European levels, with a subsequent
statistical assessment of the null hypothesis of no change. These generic
objectives are rather common in management-oriented environmental moni-
toring (e.g., Urquhart et al., 1998) and will be developed hereafter by defining
parameters and precision requirements for status and change detection.
7.4.2 Defining Parameters of Concern
Consider a population U of N trees over a delineated study area (e.g., the
whole forest trees or a defined subgroup of forest trees in a country) and
denote by yj( j2U) the value of defoliation level Y for the j-th tree in the pop-
ulation. Usually, the defoliation level is defined as needle/leaf loss in the
assessable crown as compared with a reference tree (Eichhorn et al., 2010;
see Chapter 8), ranging from 0 to 100% and assessed in 5% classes.

SECTION II Designing Forest Monitoring116
Author's personal copy
Accordingly, Y constitutes a discrete variable with range 0, 5, . . . , 95, 100.The average defoliation value
Y¼ 1
N
Xj2U
yj (7.1)
together with the fraction of trees with defoliation greater than 25%, say F25,
usually constitute the target parameters under estimation.
Denote by Nk the abundance of trees in the population whose defoliation
level equals k%, with k¼0(5)100 and by Pk the relative abundance, that is, the
proportion of trees for the same defoliation level. Denote by N¼ [N0, . . . , N100]T
the abundance vector of the 21 defoliation classes and by P¼ [P0, . . . , P100]T the
relative abundance vector. Accordingly, the average defoliation value can be
rewritten in terms of P as
Y¼X100k¼0
kPk (7.2)
while F25 can be rewritten as
F25 ¼X100k¼30
Pk (7.3)
Practically speaking, the main interest parameters Y and F25 are linear
combinations of the components of P of type
C¼ cTP¼X100k¼0
ckPk (7.4)
where c¼ [0, 5, . . . , 95, 100]T in the case of Yand c¼ [0, 0, 0, 0, 0, 1, . . . , 1]T
in the case of F25. Henceforth, Y and F25 will be viewed as particular cases of
parameters of type (1), which will be referred to as C-parameters. Obviously,
the estimation of C-parameters rests on the estimation of P, which, in turn,
rests on the estimation of N. Moreover, it is also worth noting that
C-parameters constitute percentages and as such they are not affected by stan-
dards, as opposite to other physical attributes of trees (e.g., bole volume, basal
area, living biomass, necromass).
As to change, denote byN1 andN2 the abundance vectors at periods 1 and 2,
in such a way that P1 and P2 are the corresponding relative abundance vectors
and C1 and C2 are the C-parameter values at periods 1 and 2. Change in
C-parameter is defined as
D¼C2�C1 ¼ cT P2�P1ð Þ (7.5)
Positive values of D denote (at least for nonnegative cks) increases in defolia-
tion and hence are considered undesirable. However, for the subsequent infer-
ence on changes, it is important to determine when a positive difference is
small enough to be considered biologically irrelevant (see, e.g., Elzinga

Chapter 7 Large-Scale Pan-European Forest Monitoring Network 117
Author's personal copy
et al., 2001, p. 179). For the purposes of this proposal, it seems suitable to
consider positive changes lower than 5% as biologically irrelevant, so that 5
is taken as the minimum value for a biologically significant change (BSC).
The defoliation parameters considered for each country can be considered
at the European level, providing that the same definition of forest has been
established among European countries. In this case, suppose the presence
of L countries and denote by Nl the abundance vector of the 21 defoliation
classes for the l-th country (l¼1, . . ., L). Hence, NE¼N1þ� � �þNL denotes
the abundance vector for the whole Europe, while PE denotes the relative
abundance vector. Once the vector PE¼ [P0,E, . . . , P100,E]T is achieved, the
C-parameter at the European level is given by
CE ¼X100k¼0
ckPk,E (7.6)
It is worth noting that the estimation of C-parameters at the European level
ultimately rests on the estimation of the Nls in each country.
Finally, denote by Nl,1 and Nl,2 the abundance vectors at periods 1 and
2 for the l-th country, in such a way that NE,1¼N1,1þ� � �þNL,1 and
NE,2¼N1,2þ� � �þNL,2, respectively, denote the abundance vectors for the
whole Europe at periods 1 and 2 and PE,1 and PE,2 are the corresponding rel-
ative abundance vectors. Then, CE,1 and CE,2 are the values of C-parameter at
periods 1 and 2 at the European level and the change turns out to be
DE ¼CE,2�CE,1 ¼ cT PE,2�PE,1� �
(7.7)
As for any single country, a positive change of 5% points is considered as the
minimum BSC.
7.4.3 Defining Accuracy Measures for Status Assessment
A first need in planning amonitoring program is to fix the required accuracy level
for status and change estimates. Denote by S a sample of trees selected from the
population U according to a design-based sampling scheme. Once a sample S is
selected, the defoliation level is quantified for each tree in the sample, thus obtain-
ing the sample data, say, {yj; j2S}, from which an estimate of C, say, C, isachieved. Usually, statisticians tend to avoid biased estimators. Rather, they pre-
fer sampling strategies providing unbiased or, at least, nearly unbiased estimators.
Indeed, the accuracy of an unbiased estimator is straightforwardly determined by
its variance, say, VarðCÞ. Being a squared quantity, the sampling variance has a
more difficult interpretation than its positive square root, say SEðCÞ, usuallyreferred to as the standard error, or the ratio RSEðCÞ¼ SEðCÞ=C, referred to
as the relative standard error or PSEðCÞ¼ 100�RSEðCÞ% which gives the
percentage error. All these indexes can be used indifferently and are adopted by
statisticians to evaluate the accuracy of unbiased sampling strategies.
Unfortunately, the sampling variance of any estimator is actually unknown
and must be necessarily estimated from sample data. Once an estimate VC2 is

SECTION II Designing Forest Monitoring118
Author's personal copy
obtained for the sampling variance, the corresponding estimators of standard
error, relative standard error, and percentage standard error are VC, VC=C,and 100ðVC=CÞ%, respectively. Usually, statisticians tend to achieve unbiased
estimators of the sampling variances. However, when unbiasedness cannot be
ensured, conservative estimators are preferred, that is, estimators which, on
average, overestimate the sampling variance, thus avoiding false and optimis-
tic evaluations of accuracy. As far as the current status is concerned and for
the purposes of this proposal, an estimate of 5% seems to be a suitable target
for the accuracy of the estimators of C-parameters.
Finally, in the class of unbiased estimators, the normality of the sampling
distributions also constitutes a very attractive characteristic. Indeed, unbiased-
ness and normality allow for the construction of 0.95 confidence intervals,
which are simply obtained from C�2VC.
7.4.4 Defining Accuracy Measures for Change Assessment
The change detection objective is one of the most important outcomes for a
monitoring program. The reports on European forest condition always present
statistics about annual changes and graphs on long-term trends. In practice,
the objective is to determine whether there has been a change in C-parameters.
Suppose that two estimates of C, say, C1 and C2, are obtained from
the same sample S at periods 1 and 2, respectively, in such a way that the
estimate of change D is given by D¼ C2� C1. Thus, a test for statistical
significance must be conducted to determine if a true change has occurred
or if the difference is simply due to sampling errors. If the estimators C1
and C2 are (approximately) unbiased, their difference D is (approximately)
normal, and an unbiased (or conservative) estimator for the variance of D is
available, the p-value of the test is given by
p¼ 1�FD
VD
� �(7.8)
where F denote the standard normal distribution function and VD is an estimate
of the standard error of D. If p is smaller than a threshold value, say a, thehypothesis of no change is rejected at a significance level a. As to the purpose
of this proposal, a suitable value for a should be 0.05.
As Elzinga et al. (2001, p.179) point out, if the test yields a nonsignificant
result, it is important to evaluate the probability of refusing the hypothesis of
no change when a BSC of size D has actually occurred (power of test). For a
given value of a, under the same assumptions previously adopted to achieve
the p-value, the power of test turns out to be
1�b¼ 1�F z1�a� D
VD
� �(7.9)

Chapter 7 Large-Scale Pan-European Forest Monitoring Network 119
Author's personal copy
where zq denotes the q-quantile of the standard normal distribution function.
If the resulting power is low, a change may have taken place notwithstanding
the hypothesis of no change has been accepted. Since 1�b is an increasing
function of D, power can be computed only for D equal to the minimum
BSC in order to obtain the lower bound for the power of detecting BSCs.
As to this study, for a¼0.05 and a minimum BSC equal to 5% points, the
lower bound turns out to be
1�b¼ 1�F 1:64� 5
VD
� �(7.10)
Alternatively, if a value of 1�b is fixed and Equation (7.9) is solved for D,
the so-called minimum detectable change (MDC)MDC1�b ¼ z1�a� zb� �
VD (7.11)
is achieved, that is, the minimum change that can be detected with probability
1�b. As to this proposal, a suitable value for 1–b should be 0.9, in such a
way that MDC0.9¼2.92VD.
It is worth reminding that these definitions have never been suggested on a
formal basis for FCM at the European level.
7.5 SAMPLING STRATEGIES AT THE COUNTRY LEVEL
Plot sampling represents a unifying scheme to sample trees which, at the same
time, allows one to maintain the likely differences among the overall sampling
designs distinctively adopted by each European country. Indeed, plot sampling
simply involves the selection of a prefixed number of sites in accordance with a
spatial sampling scheme and the subsequent selection of all the trees lying within
the plots of prefixed size centered at the sites. Thus, each country may vary the
scheme to select site and its intensity (number of sites per 100 ha) as well as the
size and shape of plots. For the purposes of this proposal, the sampling schemes
introduced in Section 7.2 are considered to select sites: URS, PSS, and TSS.
7.5.1 Uniform Random Sampling
Consider an area G of size G covering the study area in such a way to elimi-
nate any edge effect (Gregoire and Valentine, 2008) Then, a point (site) is
randomly selected onto G and the sampled trees S are those lying within the
plot of prefixed shape and prefixed size b centered at the random site. By con-
struction, the probability of any trees to enter the sample (inclusion probabil-
ity) is invariably equal to b/G, from which the Horvitz–Thompson (HT)
estimator (Sarndal et al., 1992, Section 2.8) of Nk turns out to be
Nk ¼G
bnk, k¼ 0 5ð Þ100 (7.12)
SECTION II Designing Forest Monitoring120
Author's personal copy
where nk denotes the number of sampled trees whose defoliation level equal k.Accordingly, the HT estimate of the whole abundance vectorN can be written as
N¼G
bn (7.13)
where n¼ [n0, . . . , n100]T is the vector of the counts of sampled trees belonging to
the 21 defoliation classes. From the well-known result on plot sampling (e.g.,
Gregoire and Valentine, 2008), N is an unbiased estimator ofN with a variance–
covariance matrix, say VarURSðNÞ, where henceforth VURS will denote variances
and covariances arising from URS, that is, the complete random placement of
sites onto G. The variances of the Nks strictly depend on the spatial distribution
of trees within the study area: a distribution of trees evenly scattered throughout
the study area generally provides more accurate estimator than a clumped one.
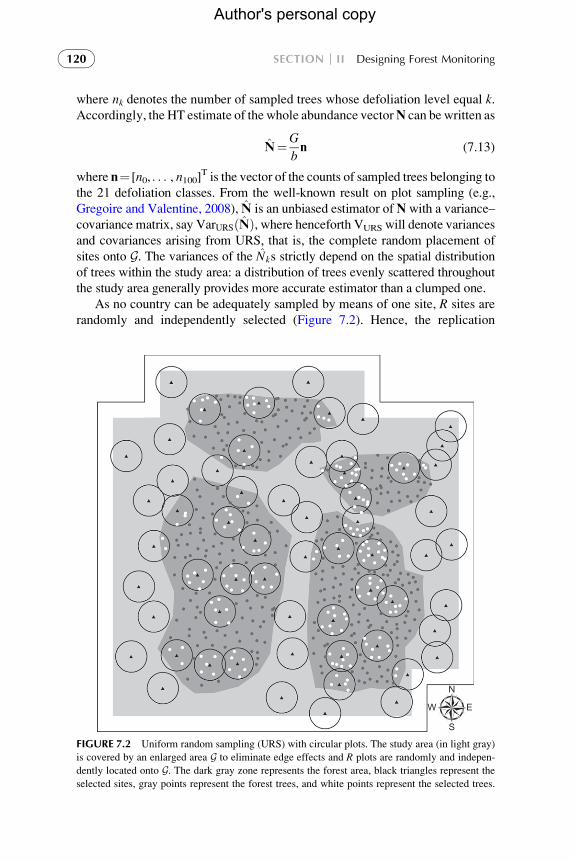
As no country can be adequately sampled by means of one site, R sites are
randomly and independently selected (Figure 7.2). Hence, the replication
S
E
N
W
FIGURE 7.2 Uniform random sampling (URS) with circular plots. The study area (in light gray)
is covered by an enlarged area G to eliminate edge effects and R plots are randomly and indepen-
dently located onto G. The dark gray zone represents the forest area, black triangles represent the
selected sites, gray points represent the forest trees, and white points represent the selected trees.

Chapter 7 Large-Scale Pan-European Forest Monitoring Network 121
Author's personal copy
procedure gives rise to R independent samples, say S1, . . .,SR, which in turn giverise to R estimates, say N1, . . . ,NR, which constitute R independent realizations
of the HT estimator N. Accordingly, on the basis of the very standard results on
independently and identically distributed random vectors (e.g., Mardia et al.,
1979, Section 2.8 and Theorem 2.9.1), the arithmetic mean vector
N¼ 1
R
XRi¼1
Ni (7.14)
provides an estimator for N which is unbiased, consistent, and asymptotically
(R!1) normal with a variance–covariance matrix which is unbiasedly and
consistently estimated by VN¼S/R, where
S¼ 1
R�1
XRi¼1
Ni� N� �
Ni� N� �T
(7.15)
is the empirical variance–covariance matrix of the Nis.
In accordance with these results, an obvious estimator for P is given by
P¼ N=ð1TNÞ. After little algebra, it can be proven that the k-th component
of P can be simply rewritten as Pk ¼ Tk=T, where T denotes the total number
of trees sampled by the R sites and Tk denotes the number of these trees
belonging to the k-th defoliation class. From the most familiar version
of Delta method (see, e.g., Mardia et al., 1979, Theorem 2.9.2), it follows
that P constitutes a consistent and asymptotically normal estimator for Pwith a variance–covariance matrix which is consistently estimated by VP ¼ðI� P1TÞVNðI�1P TÞ where I denotes the identity matrix of appropriate
order. Finally, any C-parameter can be simply estimated by C¼ cTP. Thus,from the Delta method, C constitutes a consistent and asymptotically normal
estimator for C with variance which is consistently estimated by Vc2¼cTVPc.
Accordingly, the estimator of the percentage standard error for C is given by
100ðVC=CÞ%, while the confidence interval with an asymptotical coverage of
about 0.95 is given by C�2VC.
As to the inference on change, denote by Nt the HT estimators of Nt based
on a unique plot randomly selected onto G and then visited at period
t (t¼1,2). From the previous considerations on HT estimators, Nt is unbiased
with a variance–covariance matrix VarURSðNtÞ. Moreover, denote by
CovURSðN1;N2Þ the covariance matrix between the two estimators. As R sites
are randomly and independently thrown onto G, the replication procedure
gives rise to R pairs of estimates ðN1,1;N1,2Þ, . . . ,ðNR,1;NR,2Þ which constituteR independent realizations of the pair ðN1;N2Þ. From the above-mentioned
results on independently and identically distributed random vectors, the arith-
metic mean vector of theNi,ts, say Nt, is an unbiased, consistent, and asymptoti-
cally normal estimators of Nt with a variance–covariance matrix which is
unbiasedly and consistently estimated by VN,t¼St/R, where St is the empirical

SECTION II Designing Forest Monitoring122
Author's personal copy
variance–covariance matrix of the Ni, ts, while the covariance matrix is unbia-
sedly and consistently estimated by CN¼S1,2/R, where
S1,2 ¼ 1
R�1
XRi¼1
Ni,1� N1
� �Ni,2� N2
� �T
(7.16)
is the empirical covariance matrix of the Ni,1s and Ni,2s. From the Delta
method, Pt ¼ Nt=ð1TNtÞ is a consistent and asymptotically normal estimator
of Pt with a variance–covariance matrix which is consistently estimated by
VP, t ¼ðI� Pt1TÞVN, tðI�1P T
t Þ and covariance matrix which is consistently
estimated by CP ¼ðI� P11TÞCNðI�1P T
2 Þ. From these last results, the differ-
ence P2� P1 turns out to be a consistent and asymptotically normal estimator
of P2�P1, with a variance–covariance matrix which is consistently estimated
by VP,1þVP,2�CP�CPT. Hence, the difference estimator D¼ C2� C1 ¼
cTðP2� P1Þ is a consistent and asymptotically normal estimator of D with
variance which is consistently estimated by VD2 ¼cT(VP,1þVP,2� CP�CP
T)c.Owing to the asymptotic unbiasedness and normality of D as well as the con-
sistency of VD2 , the p-value, the power, and the MDC adopted for inference on
change can be computed via expressions (7.8), (7.9), and (7.11), respectively.
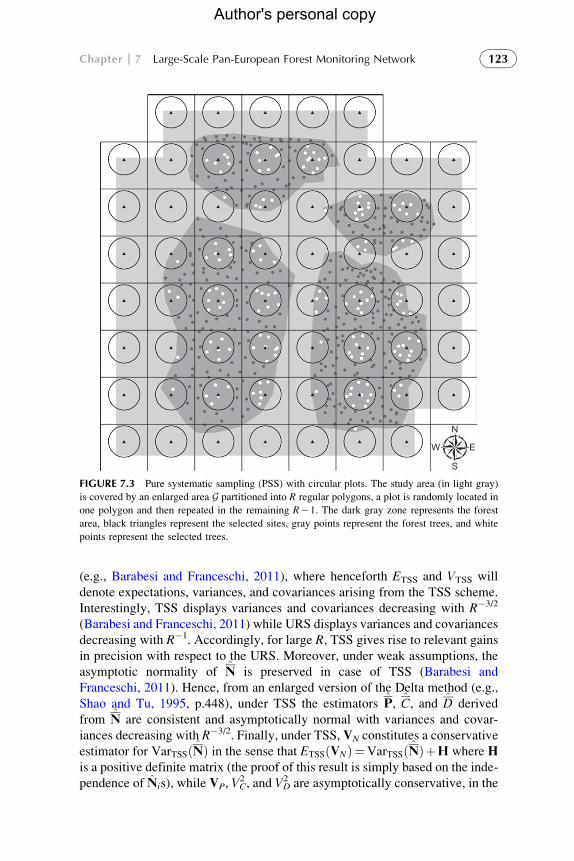
7.5.2 URS Versus Systematic and Stratified Sampling
Gregoire and Valentine (2008) provide an excellent introductory chapter on
the issue of sampling discrete objects (trees in the present case) scattered over
a region by means of plots, focusing on the problem of how to effectively
select these plots. Despite its theoretical simplicity, URS may lead to an
uneven coverage of the study area (Cordy and Thompson, 1995; Stevens,
2006). To avoid this shortcoming, systematic schemes can be adopted. How-
ever, PSS based on a regular grid of plots with a random start (commonly
adopted in large-scale forest inventories; Figure 7.3) may be unsuitable in
the presence of some spatial regularity, leading to substantial losses of effi-
ciency with respect to URS. Accordingly, random systematic schemes based
on a regular tessellation of the study area and the random placement of a plot
in each tessellation unit have been theoretically preferred by statisticians. One
such scheme, usually referred by Cordy and Thompson (1995) and Stevens
(1997) to as TSS, involves enlarging the study area by a region G constituted
by R nonoverlapping polygons of equal size and such that each of them con-
tain at least a portion of the study area, and then selecting a plot in each
of these polygons (Figure 7.4). The scheme has a long-standing tradition in
statistical literature (see, e.g., Overton and Stehman, 1993).
If the R sites/plots are thrown onto the same reference region G, TSSinvariably outperforms URS, in the sense that under TSS, N is unbiased
with variance–covariance matrix such that VarURSðNÞ�VarTSSðNÞ
S
E
N
W
FIGURE 7.3 Pure systematic sampling (PSS) with circular plots. The study area (in light gray)
is covered by an enlarged area G partitioned into R regular polygons, a plot is randomly located in
one polygon and then repeated in the remaining R�1. The dark gray zone represents the forest
area, black triangles represent the selected sites, gray points represent the forest trees, and white
points represent the selected trees.
Chapter 7 Large-Scale Pan-European Forest Monitoring Network 123
Author's personal copy
(e.g., Barabesi and Franceschi, 2011), where henceforth ETSS and VTSS will
denote expectations, variances, and covariances arising from the TSS scheme.
Interestingly, TSS displays variances and covariances decreasing with R�3/2
(Barabesi and Franceschi, 2011) while URS displays variances and covariances
decreasing with R�1. Accordingly, for large R, TSS gives rise to relevant gains
in precision with respect to the URS. Moreover, under weak assumptions, the
asymptotic normality of N is preserved in case of TSS (Barabesi and
Franceschi, 2011). Hence, from an enlarged version of the Delta method (e.g.,
Shao and Tu, 1995, p.448), under TSS the estimators P, C, and D derived
from N are consistent and asymptotically normal with variances and covar-
iances decreasing with R�3/2. Finally, under TSS, VN constitutes a conservative
estimator for VarTSSðNÞ in the sense that ETSSðVNÞ¼VarTSSðNÞþH where His a positive definite matrix (the proof of this result is simply based on the inde-
pendence of Nis), while VP, VC2 , and VD
2 are asymptotically conservative, in the

S
E
N
W
FIGURE 7.4 Tessellation stratified sampling (TSS) with circular plots. The study area (in light
gray) is covered by an enlarged area G partitioned into R regular polygons and a plot is randomly
located in each polygon. The dark gray zone represents the forest area, black triangles represent
the selected sites, gray points represent the forest trees, and white points represent the selected
trees.
SECTION II Designing Forest Monitoring124
Author's personal copy
sense that they are asymptotically equivalent to conservative estimators for
VarTSSðPÞ, VarTSSðCÞ, and VarTSSðDÞ.Even if these theoretical results cannot be proved under PSS (in the pres-
ence of some spatial regularity, PSS may be even worser than URS), however,
apart from anomalous situations which should not occur over large areas, the
performance of PSS are likely to be very similar (sometimes superior) to that
of TSS. Moreover, the use of systematic schemes is suitable in forest studies,
as it can be straightforwardly executed by a random shift of a grid superim-
posed onto a map of the study area (e.g., Gregoire and Valentine, 2008,
p. 119), taking the nodes as sample sites and locating the sites in the terrain
by a modern-day GPS system. Accordingly, under PSS the estimator N as
well as the subsequent estimators P, C, and D are henceforth supposed to
share the theoretical properties arising from TSS.

Chapter 7 Large-Scale Pan-European Forest Monitoring Network 125
Author's personal copy
7.5.3 Sampling Effort: A Preliminary Test
As reported in Section 7.5.1, T denotes the total number of trees sampled by the Rsites selected at the country level and Tk denotes the number of these trees belong-
ing to the k-th defoliation class. These statistics are needed for the estimation of
the relative abundance vector P, which in turn allows for the computation of
any C-parameter estimate.
Descriptive statistics from the ICP Forests large-scale monitoring usually
report the number of sites assessed in each country, the total number of selected
trees, and the total number of selected trees belonging to the 21 defoliation clas-
ses. These statistics might be used as a reference to identify, for each country, the
number of sites needed to obtain an estimate of the parameter of concern, say the
proportion of defoliated trees greater than 25% (F25). Thus, a preliminary test
has been conducted to assess the theoretical number of sampling sites that should
be selected at the country level (Travaglini et al., 2012). To do this, the sampling
effort of the ICP Forests network in terms of number of plots (R) and number of
trees (T) has been compared with the theoretical sampling effort (R0.05, T0.05)required for estimating the proportion of defoliated trees greater than 25%
(F25) with a percentage standard error (e) of 5%. For each country, data related
to R, T, and F25 have been taken from the 2008 survey (Lorenz et al., 2009). The
theoretical sampling effort in term of trees has been computed by
T0:05 ¼ 1� F25
e2F25
(7.17)
and on the basis of the following assumptions: a common definition of forest
is applied across European countries; a simple random sampling with replace-
ment has been supposed to select trees from the population. R0.05 has been
derived dividing T0.05 by the average number of trees per plots (T/R) observedin 2008 surveys. The results are shown in Table 7.3. It is worth noting that, as
these sampling efforts are determined presuming a rough with-replacement
random selection of trees from the population, which should be less accurate
than the systematic grids of plots adopted in most European country, the
reported efforts are highly cautionary and likely provide standard errors smal-
ler than 5%. It is worth noting, however, that the number of plots reported in
Table 7.3 may be not appropriate for small countries and/or low frequency of
defoliated trees, and/or individual species (Kohl et al., 1994).
7.6 AGGREGATING COUNTRY ESTIMATES AT THEEUROPEAN LEVEL
Two statistical strategies are proposed when combining independent country
estimates for the assessment of forest condition at the European level: the first
one is solely based on information acquired from FCM networks (Travaglini
et al., 2012); the second one takes into consideration the potential outcome
from FCM and NFIs.

TABLE 7.3 Sampling Effort of ICP Forests Network in Term of Plots (R) and
Trees (T) Performed in 2008 Surveys Compared with Sampling Effort (R0.05,
T0.05) Required for Estimating the Proportion of Defoliated Trees Greater
than 25% (F25) with a Percentage Standard Error of 5%
Country T R T/R F25 (%) T0.05 R0.05
Andorraa 72 3 24.00 15.3 2215 92
Belarus 9460 400 23.65 8 4600 195
Belgium 2860 121 23.64 14.5 2359 100
Bulgaria 4531 136 33.32 31.9 854 24
Croatia 2039 85 23.99 23.9 1273 53
Cyprusa 360 15 24.00 46.9 452 19
Czech Rep. 5477 136 40.27 56.7 306 8
Denmarka 452 19 23.79 9.1 3996 168
Estoniaa 2196 92 23.87 9 4045 170
Finland 8819 475 18.57 10.2 3522 190
France 10,138 508 19.96 32.4 835 42
Germany 10,347 423 24.46 25.7 1157 43
Irelanda 679 31 21.90 10 3600 165
Italy 6579 236 27.88 32.8 820 30
Latvia 8090 342 23.65 15.3 2215 94
Lithuania 7539 1342 5.62 19.6 1641 292
Rep. Moldova 9841 528 18.64 33.6 791 43
Norway 9495 1720 5.52 22.7 1363 247
Poland 39,320 1916 20.52 18 1823 89
Serbiaa 2789 130 21.45 11.5 3079 144
Slovak Rep. 4083 108 37.81 29.3 966 26
Slovenia 1056 44 24.00 37 742 31
Spain 14,880 620 24.00 15.6 2165 90
Sweden 6890 3464 1.99 17.3 1913 961
Switzerlanda 1008 48 21.00 19 1706 82
Turkey 8978 398 22.56 24.6 1227 55
Ukraine 33,986 1465 23.20 8.2 4479 194
aDenotes countries that would need to increase plot numbers.Modified from Travaglini et al. (2012).
SECTION II Designing Forest Monitoring126
Author's personal copy

Chapter 7 Large-Scale Pan-European Forest Monitoring Network 127
Author's personal copy
7.6.1 Combining FCM Estimates
Suppose a homogeneous definition of forest among the L countries participat-
ing in the forest monitoring network and denote by N1, . . . ,NL, the estimates
of their abundance vectors achieved by means of separate, independent
surveys performed in each country by means of plot sampling with sites
selected in accordance with PSS. Since each Nl constitutes an unbiased, con-
sistent, and asymptotically normal estimator of Nl with a variance–covariance
matrix which can be conservatively estimated by VN,l¼Sl/Rl, where Sl is theempirical variance–covariance matrix of the Rl estimates for the l-th country
and Rl is the number of sites adopted in the country, then the sum NE ¼ N1þ���þ NL is an unbiased and consistent (R1, . . .,RL!1) estimator of NE with a
variance–covariance matrix which (owing to the independence of the L esti-
mates) is conservatively estimated by
VN,E ¼VN,1
R1
þ�� �þVN,L
RL(7.18)
Moreover, if the Rls are supposed to increase with constant ratios Rl/Rh, then
as R1, . . .,RL!1, NE is an asymptotically normal estimator of NE.
The properties of NE (unbiasedness, consistency, and asymptotic normal-
ity) once again allow for the application of the enlarged version of the
Delta method (Shao and Tu, 1995, p. 448). Thus, PE ¼ NE=ð1TNEÞ constitu-tes a consistent and asymptotically normal estimator for PE, while
VP,E ¼ðI� PE1TÞVN,EðI�1P T
E Þ constitutes an asymptotically conservative
estimator of the variance–covariance matrix. Finally, as to C-parameters at
the European level, CE ¼ cTPE constitutes a consistent and asymptotically
normal estimator for CE, while V2C,E¼cTVP,Ec constitutes an asymptotically
conservative estimator for the variance. The estimate of the percentage stan-
dard error for CE is given by 100ðVC,E=CEÞ%, while the confidence interval
with asymptotical coverage of 0.95 is given by CE�2VC,E.
As to the inference on change, denote by Nl, t the plot sampling estimators
of Nl,t (t¼1,2). Hence, Nl, t is unbiased, consistent, and asymptotically normal,
while VN,l,t¼Sl,t/Rl is a conservative estimator of the variance–covariance
matrix of Nl,t and Cl¼Sl,1,2/Rl is the estimator of the covariance matrix of
Nl,1 and Nl,2, where Sl,t is the empirical variance–covariance matrix at period
t and Sl,1,2 is the empirical covariance matrix between periods 1 and 2. Accord-
ingly, from the previous results of this section, NE, t ¼ N1, tþ�� �þ NL, t is
an unbiased, consistent, and asymptotically normal estimator ofNE,t with a var-
iance–covariance matrix which can be conservatively estimated by
VN,E, t ¼VN,1, t
R1
þ�� �þVN,L, t
RL(7.19)
Moreover, since correlation exists only among estimators achieved in the
same country at different times, the covariance matrix of NE,1 and NE,2 can
be estimated by

SECTION II Designing Forest Monitoring128
Author's personal copy
CN,E ¼CN,1
R1
þ�� �þCN,L
RL(7.20)
From the enlarged version of the Delta method, the relative abundance vector
estimator PE, t ¼ NE, t=ð1TNE, tÞ is a consistent and asymptotically normal
estimators of PE,t. Moreover, VP,E, t ¼ðI� PE, t1TÞVN,E, tðI�1P T
E, tÞ is an
asymptotically conservative estimator of the variance–covariance matrix of
PE, t, while CP,E ¼ðI� PE,11TÞCN,EðI�1P T
E,2Þ is an estimator for the covari-
ance matrix of PE,1 and PE,2. From these last results, the difference
PE,2� PE,1 turns out to be a consistent and asymptotically normal estimator
of PE,2�PE,1, while VP,E,1þVP,E,2�CP,E�CTP,E is an asymptotically conser-
vative estimator of the variance–covariance matrix. Hence, the difference esti-
mator DE ¼ CE,2� CE,1 ¼ cTðPE,2� PE,1Þ is a consistent and asymptotically
normal estimator ofDEwith variance which can be conservatively estimated by
V2D,E ¼ cT VP,E,1þVP,E,2�CP,E�CT
P,E
� �c (7.21)
Once again, owing to the asymptotic unbiasedness and normality of DE, as
well as the conservative nature of VD,E2 , the p-value, the power, and the
MDC adopted for inference on change can be computed via expressions (7.8),
(7.9), and (7.11).
As to the number of sites to be selected within each country, it is worth not-
ing that the accuracy of estimates concerning small countries and regions, infre-
quent tree species, and their combination may be strongly impacted if a unique
density of sampling sites is adopted all over the Europe. This problem has been
investigated in Switzerland by Kohl and Kaufmann (1993) for the estimation of
mean defoliation (or transparency) and by Kohl et al. (1994) for the estimation
of proportions. Kohl et al. (1994, p. 217) conclude that “the results clearly indi-
cate the decreasing reliability of the results as the grid density is decreased from
4�4 to 16�16 km. However, from a practical point of view, the results
obtained from the 4�4 and 8�8-km grid for the whole Switzerland are similar.
However, further reductions result in a sharp increase in variability between
grids, suggesting that neither the 12�12-km nor the 16�16-km grids would
provide reliable data for Switzerland.” Thus, when designing a European net-
work, it is important to be aware that a sampling grid able to provide precise esti-
mates at the European level and for the most frequent tree species may be not
suited for individual countries and/or less frequent tree species.
7.6.2 Coupling FCM and NFI Estimates Across Europe
The aggregation at the European level of the outcome from FCM and NFIs can
provide an alternative estimation of C-parameters at the European level with
respect to the methodology proposed in the previous section which is instead
completely based on the information acquired from FCM. Indeed, the relative
abundance vector at the European level PE¼NE/(1TNE) can be rewritten as

Chapter 7 Large-Scale Pan-European Forest Monitoring Network 129
Author's personal copy
PE ¼XLl¼1
wlPl (7.22)
where wl¼Nl/NE denotes the proportion of forest trees in the l-th country and
NE¼N1þ� � �þNL denotes the total number of forest trees in Europe. Accord-
ingly, while each Pl can be estimated by Pl ¼ Nl=ð1TNlÞ from FCM surveys,
the wl weights can be estimated by using the information arising from NFIs.
As NFIs are usually performed by intensive surveys, the resulting estimators
of the Nls are likely to be more accurate than those arising from FCM surveys.
Thus, if eN1, . . ., eNL denotes the NFI estimates of N1, . . .,NL in such a way that
the wls can be trivially estimated by ewl ¼ eNl= eNE where ~NE ¼ ~N1þ�� �þ ~NL,
then PE can be estimated by
ePE ¼XLl¼1
ewlPl (7.23)
In order to derive the statistical properties of ePE, the statistical properties
of each eNl are needed. Usually, forest inventories are multiphase surveys
adopting unbiased (or approximately unbiased) estimators of the interest para-
meters as well as unbiased or conservative estimators of the sampling var-
iances. Accordingly, suppose El(eNl)�Nl with variance Varl(eNl) which can
be unbiasedly or conservatively estimated by eV2
l , where El and Varl denote
expectation and variance with respect to the sampling scheme adopted in
the NFI of the l-th country. Moreover, since the L estimates eN1, . . ., eNL are
obtained by means of separate surveys, they are independent to each other
as well as independent to P1, . . . , PL.
In accordance with these considerations, the weight vector estimatorew¼ ew1; . . . ; ewL½ �T is approximately unbiased with a variance–covariance
matrix which can be approximated up to the first term by VarðewÞ�ðI�w1TÞDðI�1wTÞ where w¼ [w1, . . . ,wL]
T is the vector of true weights
and D¼diag{Var1( ~N1), . . .,VarL( ~NL)} is the diagonal matrix having the var-
iances of the ~Nls as diagonal elements. Thus, an obvious estimator for
VarðewÞ is given by eVw ¼ðI� ew1TÞeDðI�1ewTÞ where ~D¼ diagð ~V2
1; . . . ;~V2
LÞ.Moreover, ePE is approximately unbiased, while generalizing the result of
Goodman (1960) on the variance of products of independent random variables
to the variance–covariance matrix and the covariance matrix of scalar pro-
ducts of random variables with independent random vectors, the variance–
covariance matrix of ePE can be approximated by
Var ePE
� ��XLl¼1
Var ~wlð ÞVarPSS Pl
� �þXLl¼1
Var ~wlð ÞPlPTl
þXLl¼1
w2lVarPSS Pl
� �þ
XLh>l¼1
Cov ~wl; ~whð Þ PlPTh þPhP
Tl
� � (7.24)

SECTION II Designing Forest Monitoring130
Author's personal copy
where VarPSS denotes variances and covariances with respect to PSS selection
of sites onto the l-th country. Thus, VarðePEÞ can be estimated by
~VP,E ¼XLl¼1
~V2
w, lVP; lþXLl¼1
~V2
w, lPlPT
l þXLl¼1
~w2w, lVP, lþ
XLh>l¼1
~Vw, l,h PlPT
h þ PhPT
l
� �(7.25)
where VP, l ¼ðI� Pl1TÞVN, lðI�1P
T
l Þ and eV2
w, l andeVw, l,h are the l,l and l,h ele-
ments of eVw. Finally, a C-parameter at the European level can be estimated byeCE ¼ cTePE, whereeC constitutes an approximately unbiased estimator for C
with variance which can be estimated by eV2
C,E ¼ cTeVP,Ec. The estimate of the
percentage standard error for eCE is given by 100ð eVC,E=eCEÞ%. Since nothing
ensures that the multiphase estimators arising from NFIs are normally
distributed, nothing ensures the normality ePE as well as the subsequent normal-
ity of eCE. If normality is (as customary) assumed, then the confidence interval
with approximate coverage of 0.95 is given by eCE�2 eVC,E.
As to the inference on change, by obvious notation we can write
PE, t ¼XLl¼1
wl, tPl, t in such a way that ePE, t ¼XLl¼1
ewl,1Pl, t constitutes the estima-
tor of PE,t (t¼1,2). Accordingly, the variance–covariance matrix of ePE, t is
estimated by
~VP,E, t ¼XLl¼1
~V2
w, l, tVP, l, tþXLl¼1
~V2
w, l, tPl, tPT
l, t
þXLl¼1
~w2l, tVP, l, tþ
XLh>l¼1
~Vw, l,h, t Pl, tPT
h, tþ Ph, tPT
l, t
� �(7.26)
where VP, l, t ¼ðI� Pl, t1TÞVN, l, tðI�1P
T
l, tÞ and eV2
w, l, t andeVw, l,h, t are the l,l
and l,h elements of eVw, t ¼ðI� ewt1TÞeDtðI�1ewT
t Þ. Moreover, generalizing
once again the results of Goodman (1960)
Cov ~PE,1;~PE,2
� �¼XLl¼1
Cov ~wl,1Pl,1, ~wl,2Pl,2
� �þ
XLh 6¼l¼1
Cov ~wl,1Pl,1, ~wh,2Ph,2
� �
�XLl¼1
Cov ~wl,1; ~wl,2� �
CovPSS Pl,1; Pl,2
� �þXLl¼1
Cov ~wl,1; ~wl,2� �
Pl,1PTl,2
þXLl¼1
wl,1wl,2CovPSS Pl,1; Pl,2
� �þ
XLh6¼l¼1
Cov ~wl,1; ~wh,2� �
Pl,1Ph,2
(7.27)
where CovPSS denotes covariances with respect to PSS performed in the l-th
country, Covðew1;ew2Þ¼ ðI�w11TÞGðI�1wT2 Þ is the covariance matrix
between ew1 and ew2 and G¼diag{Cov1( ~N1,1, ~N1,2), . . .,CovL( ~NL,1, ~NL,2)} is
the diagonal matrix having the covariances of the estimators ~Nl,1 and ~Nl,2 as
diagonal elements. If estimates of these covariances, say eCl, are available

Chapter 7 Large-Scale Pan-European Forest Monitoring Network 131
Author's personal copy
from each NFI, then Covðew1;ew2Þ can be estimated by eCw ¼ðI� ew11TÞeGðI�1ewT
2 Þ where eG¼ diagð eC1; . . . ; eCLÞ, in such a way that
~CP,E ¼XLl¼1
~Cw, lCP, lþXLl¼1
~Cw, lPl,1PT
l,2þXLl¼1
~wl,1 ~wl,2CP, l
þXLh6¼l¼1
~Cw, l,hPl,1Ph,2 (7.28)
constitutes an estimate of CovðePE,1;ePE,2Þ, where CP,l is the estimate of
CovPSSðPl,1; Pl,2Þ while eCw, l and eCw, l,h are the l,l and l,h elements of eCw.
From these last results, the difference ePE,2� ePE,1 turns out to be an
approximately unbiased estimator of PE,2�PE,1, with a variance–covariance
matrix which can be estimated by eVP,E,1þ eVP,E,2� eCP,E� eCTP,E. Hence, the
difference estimator eDE ¼ eCE,2� eCE,1 ¼ cTðePE,2� ePE,1Þ is an approximately
unbiased estimator of DE with variance which can be estimated byeV2
DE ¼ cTðeVP,E,1þ eVP,E,2� eCP,E� eCTP,EÞc. If the normality of eDE is presumed,
the p-value, the power, and the MDC adopted for inference on change can be
computed via expressions (7.8), (7.9), and (7.11).
7.7 CONCLUSIONS
The work presented here gives an overview on the current status of forest con-
dition assessments in Europe from a statistical point of view and takes into
account implications of different sampling designs. It presents an approach
to quantify and improve the accuracy of defoliation assessments and aggre-
gated evaluations. The proposal aims to (i) promote plot-based sampling as
a unifying sampling framework for forest condition assessments, (ii) introduce
concrete sampling objectives in terms of status and change detection, and (iii)
improve forest condition assessment at the European scale by using country
estimates. The approach relies on the assumption that a common definition
of forest is applied across all European countries. The proposal adopts a prob-
abilistic sampling scheme based on fixed-area plots selected over the target
region by means of systematic or stratified schemes. Statistical estimators at
the European level are based on two alternative strategies: the combination
of FCM estimates or the aggregation of FCM and NFI estimates
(Figure 7.5). Aggregation of FCM and NFI estimates may improve the results
by taking benefit from the larger numbers of NFI plots as a basis to upscale
the defoliation results from a smaller number of FCM plots with a much
higher temporal frequency of assessment.
Under this framework, some operative guidelines can be provided to adapt
the current structure of ICP Forests monitoring system to the proposed sam-
pling strategy:
l the shift from a fixed number of trees selected on a site to a fixed-area plot
centered at the site forms the basis for the approach presented;

Assumptions
Field survey
Estimation of the parameter of concern and its change at the country level
Field survey
Sampling scheme
Defining accuracy standards
Defining parameters of concern
Objectives
Common definition of forest among L countries
Country LCountry l
, with variance estimate
Combining FCM estimates Coupling FCM and NFI estimatesEstimation of the parameter of concern and its change at the European level
, with variance estimate
Country 1
Probabilistic sampling based on fixed-area plots with plots randomly located in accordance with PSS or TSS
For status assessment: for example percent error <5%For change assessment: for example, a positive change of 5% is the minimum BSC
For example, defoliation level, ranging from 0 to 100%
(1) Quantitative estimate of the parameter of concern for the target statistical population at specified level of accuracy foreach country and at European level;
(2) Quantitative estimate of change of the parameter of concern at both country and European levels, with statistical assessment of the hypothesis of no change
Change assessment:
Change assessment:
Status assessment:
Status assessment: Status assessment:
and percentage standard error =C VPc
VD2
CPTVP,1 VP,2 CP
=
= =–
=
=–
100(VC/C)–
C2–
C1–
D–
–
–
–cT
cT
cTP
, with variance estimate
and estimate of percentage standard error = 100(VC,E/ CE)
with variance estimate
CEVP,E cV2
C,E= =– –
cT cT
VP ,E,1 VP,E,2 CP,E CP,E CT
V2D,E = cT
PE
cT c–P2
–P1( (
= =– –CE,2–
CE,1–
DE–
cT –PE,2
–PE,1(
( )+ – –
(
Change assessment:
– , with variance estimate
and estimate of percentage standard error = 100(VC,E/ CE)
with variance estimate
CEVP,E cV2
C,E= =–~ –~ ~ ~
~cT cT
VP,E,1 VP,E,2 CP,E CP,E CT
V2DE = cT
PE
= =– –CE,2–
CE,1–
DE–
cT –PE,2
–PE,1(
( )+ – –
(
( + – – (
V2C
~
~ ~ ~ ~ ~
~~~~~
FIGURE 7.5 Statistical strategies for European-level forest condition assessment based on independent country estimates.
Author's personal copy
Chapter 7 Large-Scale Pan-European Forest Monitoring Network 133
Author's personal copy
l it is not necessary that plots have the same area across Europe; rather, it is
essential that plots have the same area within individual countries;
l the number of plots should be decided at the country level taking into
account the desired level of accuracy of the estimators, in relation to the
desired level of detection (e.g., extent of proportion of defoliated trees)
and change detection;
l when a minimum number of plots is necessary, reference can be made to
the nominal density currently adopted on Level I plots, that is, one plot
every 256 km2; however, a density of one plot per 256 km2 may be not
appropriate for small countries and/or low frequency of defoliated trees,
and/or individual species, as shown in Table 7.3. In this regard, it is worth
noting that estimation at the country level on the basis of investigations
designed to provide results at the, for example, European level was never
an objective of the ICP Forests, which was by definition oriented towards
an international perspective. In this respect, the occurrence of countries
with theoretically "insufficient sampling" is not necessarily in contradic-
tion with the objective to obtain European-scale results.
Finally, it is worth noting that the proposal considers only the uncertainty
emanated by the sampling scheme; other sources of uncertainty, like those
induced from surveyor-related assessment errors and from nonresponse, when
a site is inaccessible, were not investigated; however, measurement errors
have been and are addressed by a series of Quality Assurance/Quality Control
(QA/QC) activities (e.g., Ferretti et al., 2010b): the data collected during
these QA/QC activities may allow models for measurement errors in order
to increase the variance estimates over the design-based level due to the
sampling procedures.
The application of such a proposal is of high relevance in current monitor-
ing as in the past years changes in sampling design have been made in many
countries, partly joining NFIs and FCM schemes on the national level and
partly maintaining self-standing systems with different sampling designs.
Differences in sampling schemes have been increasing between countries
and call for a separate treatment of national data. The new evaluation
approach presented would have in addition an important by-product: national
information with quantifiable accuracy could be provided in one evaluation
exercise in addition to and as basis for transnational evaluations.
REFERENCES
Barabesi, L., Franceschi, S., 2011. Sampling properties of spatial total estimators under tessella-
tion stratified designs. Environmetrics 22, 271–278.
Cordy, C.B., Thompson, C.M., 1995. An application of deterministic variogram to design-based
variance estimation. Math. Geol. 27, 173–205.
Corona, P., 2010. Integration of forest inventory and mapping to support forest management.
iForest 3, 59–64.

SECTION II Designing Forest Monitoring134
Author's personal copy
Corona, P., Chirici, G., McRoberts, R.E., et al., 2011. Contribution of large-scale forest inven-
tories to biodiversity assessment and monitoring. Forest Ecol. Manag. 262, 2061–2069.
Cozzi, A., Ferretti, M., Lorenz, M., 2002. Quality Assurance for Crown Condition Assessment in
Europe. UN/ECE, Geneva.
Eichhorn, J., Roskams, P., Ferretti, M., et al., 2010. Visual assessment of crown condition and
damaging agents. Manual part IV. In: Manual on Methods and Criteria for Harmonized Sam-
pling, Assessment, Monitoring and Analysis of the Effects of Air Pollution on Forests.
UNECE ICP Forests Programme Co-ordinating Centre, Hamburg, 49 pp.
Elzinga, C.L., Salzer, D.W., Willoughby, J.W., Gibbs, J.P., 2001. Monitoring Plant and Animal
Populations. Blackwell Science, Inc., Malden, MA.
Fattorini, L., 2001. Design-based and model-based inference in forest inventories. ISAFA, Comu-
nicazioni di Ricerca 2, 13–23.
Ferretti, M., 1997. Forest health assessment and monitoring. Issues for consideration. Environ.
Monit. Assess. 48, 45–72.
Ferretti, M., 2004. Forest health diagnosis, monitoring and evaluation. In: Burley, J., Evans, J.,
Youngquist, J. (Eds.), Encyclopedia of Forest Sciences. Elsevier Science, London,
pp. 285–299.
Ferretti, M., 2010. Harmonizing forest inventories and forest condition monitoring—the rise or the
fall of harmonized forest condition monitoring in Europe? iForest 3, 1–4.
Ferretti, M., Chiarucci, A., 2003. Design concepts adopted in long-term forest monitoring pro-
grams in Europe—problems for the future? Sci. Total Environ. 310 (1–3), 171–178.
Ferretti, M., Fischer, R., Mues, V., et al., 2010a. Basic design principles for the ICP Forests Mon-
itoring Networks. Manual part II. In: Manual on Methods and Criteria for Harmonized Sam-
pling, Assessment, Monitoring and Analysis of the Effects of Air Pollution on Forests.
UNECE ICP Forests Programme Co-ordinating Centre, Hamburg, 22 pp. http://www.icp-for-
ests.org/Manual.htm.
Ferretti, M., Konig, N., Granke, O., 2010b. Quality assurance within the ICP Forests monitoring
programme. Manual part III. In: Manual on Methods and Criteria for Harmonized Sampling,
Assessment,Monitoring andAnalysis of the Effects of Air Pollution on Forests. UNECE ICP For-
ests Programme Co-ordinating Centre, Hamburg, 11 pp. http://www.icpforests.org/Manual.htm.
Fischer, R., Lorenz, M. (Eds.), 2011. Forest condition in Europe, 2011 technical report of ICP
Forests and FutMon. Work report of the Institute for World Forestry 2011/1. ICP Forests,
Hamburg, 212 pp. http://icp-forests.net/page/icp-forests-technical-report.
Goodman, L.A., 1960. On the exact variance of products. J. Am. Stat. Assoc. 55, 708–713.
Gregoire, T.G., 1998. Design-based and model-based inference in survey sampling: appreciating
the difference. Can. J. Forest Res. 28, 1429–1447.
Gregoire, T.G., Valentine, H.T., 2008. Sampling Strategies for Natural Resources and the Envi-
ronment. Chapman & Hall, New York.
Innes, J.L., 1988. Forest health surveys: a critique. Environ. Pollut. 54, 1–15.
Innes, J.L., 1993. Forest Health: Its Assessment and Status. Commonwealth agricultural bureau,
Wallingford, CT.
Innes, J.L., Materna, J., 1992. Development of forest health since the beginning of systematic
surveys. In: Innes, J.L. (Ed.), Cause-Effect Relationships in Forest Decline. UNEP, Geneva,
pp. 24–29.
Innes, J.L., Landmann, G., Mettendorf, B., 1993. Consistency of observation of forest tree defoli-
ation in three European countries. Environ. Monit. Assess. 25, 29–40.
Kleinn, C., Vilcko, F., 2006. Design-unbiased estimation for point-to-tree distance sampling. Can.
J. Forest Res. 36, 1407–1414.

Chapter 7 Large-Scale Pan-European Forest Monitoring Network 135
Author's personal copy
Kohl, M., Kaufmann, E., 1993. Berechnung der Stichprobenfehler bei Waldschadeninventuren.
Schweiz. Z. Fortswes 144, 297–311.
Kohl, M., Innes, J.L., Kaufmann, E., 1994. Reliability of different densities of sample grids for the
monitoring of forest condition in Europe. Environ. Monit. Assess. 29, 201–221.
Kohl, M., Magnussen, S., Marchetti, M., 2006. Sampling Methods, Remote Sensing and GIS
Multiresource Forest Inventory. Springer Verlag, Berlin-Heidelberg, Germany Tropical
Forestry Series.
Lawrence, M., McRoberts, R.E., Tomppo, E., et al., 2010. Chapter 2. Comparison of national for-
est inventories. In: Tomppo, E., Gschwantner, T., Lawrence, M. et al., (Eds.), National Forest
Inventories. Springer ScienceþBusiness Media B.V.
Lorenz, M., Fischer, R., Becher, G., et al., 2009. Forest condition in Europe, 2009 technical report
of ICP Forests. Work report of the Institute for World Forestry 2009/1. ICP Forests, Ham-
burg, 2009, 169 pp. http://icp-forests.net/page/icp-forests-technical-report.
Mandallaz, D., 2008. Sampling Techniques for Forest Inventories. Chapman & Hall, New York.
Mardia, K.V., Kent, J.T., Bibby, J.M., 1979. Multivariate Analysis. Academic Press Inc., New
York.
Neumann, M., Stowasser, S., 1986. Waldzustandinventur: zur Objektivitat von Kronenklassifizier-
ung. Forstliche Bundesversuchsanstalt Wien. Jahresbericht 1986, 101–108.
Olsen, A.R., Schreuder, H.T., 1997. Perspectives on large-scale natural resource surveys when
cause-effect is a potential issue. Environ. Ecol. Stat. 4, 167–180.
Overton, W.S., Stehman, S.V., 1993. Properties of designs for sampling continuous spatial
resources from a triangular grid. Commun. Stat. Theory. Methods 22, 2641–2660.
Percy, K., Ferretti, M., 2004. Air pollution and forest health: towards new monitoring concepts.
Environ. Pollut. 130, 113–126.
Sarndal, C.E., Swensson, B., Wretman, J., 1992. Model Assisted Survey Sampling. Springer-
Verlag, New York.
Shao, J., Tu, D., 1995. The Jackknife and Bootstrap. Springer-Verlag, New York.
Stevens, D.L., 1997. Variable density grid-based sampling designs for continuous spatial popula-
tions. Environmetrics 8, 167–195.
Stevens, D.L., 2006. Spatial properties of design-based versus model-based approaches to envi-
ronmental samplin. In: Caetano, M., Paino, M. (Eds.), Proceedings of 7th International Sym-
posium on Spatial Accuracy Assessment of Natural Resources and Environmental Sciences
Lisbona119–125.
Travaglini, D., Fattorini, L., Barbati, A., et al., 2012. Towards a sampling strategy for the assess-
ment of forest condition at European level: combining country estimates. Environ. Monit.
Assess. Online FirstTM, August 3, 2012, with kind permission from Springer ScienceþBusi-
ness Media. http://dx.doi.org/10.1007/s10661-012-2788-5
UNECE, 1998. Manual on Methods and Criteria for Harmonizing Sampling, Assessment, Moni-
toring and Analysis of the Effects of Air Pollution on Forests. International Co-operative
Programme on Assessment and Monitoring of Air Pollution Effects on Forests, Hamburg,
Germany.
Urquhart, N.S., Paulsen, S.G., Larsen, P., 1998. Monitoring for policy relevant regional trends
over time. Ecol. Appl. 8, 246–257.
Vidal, C., Lanz, A., Tomppo, E., et al., 2008. Establishing forest inventory reference definitions
for forest and growing stock: a study towards common reporting. Silva Fennica 42, 247–266.





























