Embed Size (px)
Citation preview

��� ������������
�������������������������������������������������� ����������������������������
���������������������������������������������������������������������������
�������������������������������������������������������������������������������������
�������������������������������������������������������������������������������
�����������������������������������������������������������������������������
�����������������������������������������������������������������������������
���������������������������������������������������������
��������
�������
�
�������� �����������������
�����������������������������������������������������������������������������
�����������������������������������������
��������
� �����������������������
� �����������������
� ����������������
� ���������������������������
� ����������������
� ������������������
����� ������� ������������������� �����
��������������������������������������������������������������������
� ������������������������ ������������ ��� ������������������������� ��
��������� ��������������������������������������������� �������������
f
W
NR
�
P
N
Force offriction
f W
G Direction ofimpending motion

��� ���������������������
�������� �����������������
����� ������������ ��������
��� �����������������
���������������������������������������� ������������������������� ����
�������������������������� � �����������������������������������������
�����
�������������������������������������������������������������
� ��� �
� ��
�������������������������
����� ��
�
�
�� � �������
�
�
�
�������� �����������������
��� �����������������������
��������������������������������������������������������������
�������������������������
� ��
�
�
��������
� � ����
P
W
NR
�
f
P
f
fm
Dynamic friction
Impending motionStaticfricton

�������� ���
����������������������������������������������������� �������� ���������������������������������������������������������
��� ���������������
������������������������������������������������������������������������������� ���� ���� ��� ��� ����������� ������ ���� ������� ��� ��������
�������
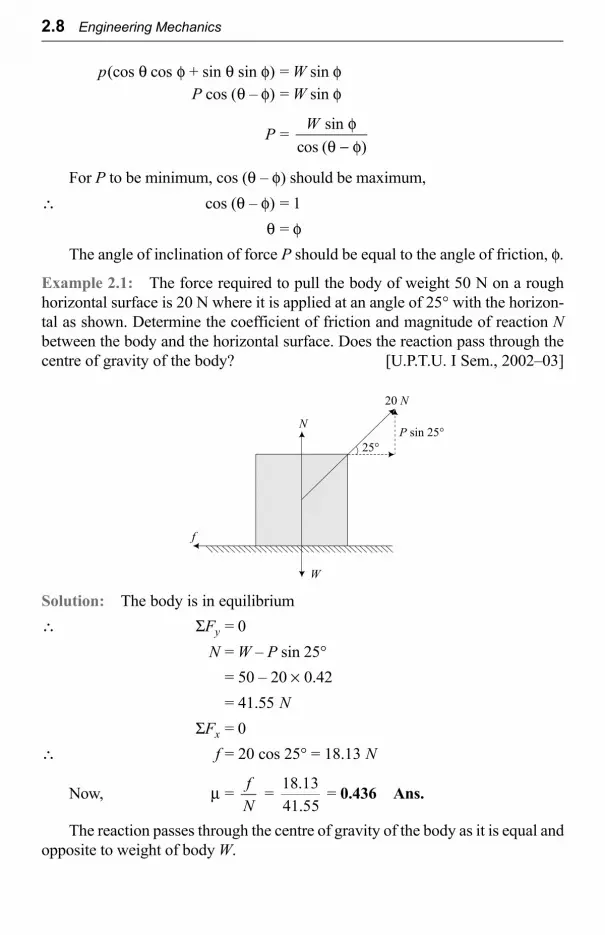
��� ���������� ������������ ������� ����������������� ��������������� �������������������������������������������������
���� �������������� ���������������������������������������������������
����� ������� �������������������������������������������������������
�������� ���������������
���������������������������������������������������������������������������
����������������������������������������������������������������������������
��������������������������
����������������������������������������������������������������������������
�������������������������������������������������������
�������������������������������
�����
� ���������
����
� ���������
��
�
��
���
���
�
�
����������
���
�
�
�����������
���������������������������������������
f N= �
Motion
W cos �
W sin �
�
W
Y
X
�
N

�������� ���
��������� ����� ������������ ���������������� ������� ���������� � ��� ���� ���
� ���������� ������ ��
����� ��������������� �� ���
������������������������������������������������� ������������������������
� ������ ���������������������������������� �����
�������������������
� ���
���������������� � ���
� ���
������� ����������������������
������� �����������������������
����������������������������������������������������������������
����������������� ������ �������������
������
������� ���
� ��������������� � ����
� ������� ���� ������
������
� � ���� ��������
� � ������������
�� � ������������� ������
������ ������������������
������� ����������������
������������������ ����
�
���
��� ���
���
� ��� � �� ��� �
��
���
���
���
���
���
���
� ��� � � �� ���
�
��� ���������������������
���������������������������� ���������������������� ���������
� ��
���
��� � �
� �� � �
������������������� ����������������������������
� ����������� ���
� ���
����������������������������������������������������������������������� ���
������������ ����������������������������������������������������������
�������������������� ���������������������������������� �������������������
������������������������������������������������������������������������
������������������������������������������������������������������������
���������������������������� ���������������� � �� ����
��������� �������������������������
� ������
� ������������ �
������� �������
���������
������
� � �� ������ �����������
��� � ��
�
�
���
�����
�����
��� ��� ���
������������������������������������������������������������������������
����������������������������
20 N
P sin 25°
25°
W
f
N

�������� ���
������������ ��������������������������� ����������������������������
������������������������������������������� ��������������������������������������������������� ���������������������������� �������
������������������� ������
���������
��� ������������������������������
���� �������� ����� �������������
������
� ���������
������
� �������������
����� ������������������������������������������� ���������������������������
����� ���� �������
� � ����������������������
�� �����
� ��
���
��� � �
� �� � �
���������������� �����������������
� � ������������������ ���������� ��� ���
������������� ������ �������������� �������� ������� �� ���� ������
���������� �����������������
���������
��� �����������������
���� �������� ����� �������������

���� ���������������������
������
� � �������������� ������
������
� ������������� ������
�������� ��������� ����
������� ����
���������������
����������������� ����
���� � ��� �������
���
��
�
��
��� ��
���
� ��� � �� ��� �
��
��
���
����
�������������������������� ��������
������������� ��������
� ��
��
��� � �
� �� � �
������������������������������������������ �����
� ���������� ���
� ���
�������� �������� ���������
�� ��������� ����
����� ��������������� ����
������������������������������ ���������������������������
��� ������������ ����������� � ��������������
�� �� ��������� �� �� ��
�� �� ���������������������
�
P
f
P sin �
P cos �
N
W

�������� ����
�������� ����������������������������
������
� ��������������
������
� ���������
������������������������� �
�� �������������������� ���������������������������
��������������������������������������������������������������������������
�������� � �������������������������������������������������������������
�����
�� ����������������� ������
��������������������� �
�������� �� ����� �����������������������
���������� ������������
������
� �������������
������
� ����������� ������������������������ ������������
��������������������� �
��������������� �����������
f
�
W
Y
X
N
�N cos �
Nsin
�
f
W cos �
W sin �
�
W
Y
X
�
PN

���� ���������������������
��������� ��������������������������
������
� �������������������
������
� ��������������������� ������������������ �� �������������� ��� ������ �
���������� ����������
������������ ���������������
��������� ��������������������������������������
������
� �������������������
������
� �������������������
��������������������������
�� ��������������������������������������������������������������������
�������������������������������
��� ���������� ����������
���� ������������ ���������������
f
W cos �
W sin ��
W
Y
X
�
P sin �N Pco
s �
P
f
W cos �
W sin ��
W
Y
X
�
P sin �
NP cos �
P
�

�������� ����
��������� ����������������������
������
� ������������������
� � �������������� ������
������
� ��������� ������
������ �����������������
� ����������������������
��� �����������������
����
���
��� ���
���
� ��� � �� ��� �
� � ������������
���
��
������� ��� ���������������������������
� � ��
��� � �
���
� � � ��
����������������������������������
���������������� ����������������������� ����������
��� ���������������������
���� ������� �������������������
������
� �������������
� � ���������������������������� ������
������
� ��������� ������
W cos �
W sin �
�
W
Y
X
�
PN
f

���� ���������������������
��������������������������
� �������������������
��������������
���
���������
���
���
���
� ��� � � �� ��� �
������� ����������������������������
��������������
� � �
��� � �
���
� � � ��
������������ ����������������������������������������������������������������
����������������������������������������� �����������������������������������������
���������������������� �������������������������������������������������������������
����������������������� �� � � � ����� ����������
���������
��������� ������������������������������
� ������
� ����
� �� �
�����������������
� ������
��� �������� �� ��� ��
f
W cos �
W sin �
�
W
Y
X
�
PN
f
W cos �
W sin �
�
W
Y
X
�
PN

�������� ����
��������������������������������������������������������� �������������������
������
������������� ��������������� ����������������������
������
��������� ��������
� � �������������� ������
������
� ��������� ������
�������������������������
� ��������������������
������������ �������������������
������������������������������
����������������������� ����
����������� ����� ����������������������������������������������������
�������������������������������������������������������������������������������� ����������� ����������������������������������������������������������� �
� ���������������
������ ����������������������
������ ������������� ��������������� ����������������������
������
������� ���������������������������� ������
������
� ������������������� ������
�������������������������
������� ���������������������������������������������������������������
������������������ ��������������������
f
W cos �
W sin �
�W
Y
�
Psin
�
N Pco
s �
P�
X

���� ���������������������
� � ���
��� ���
��� ���
� � � �� � � �
������������ ���������������
� � ����
��� ��� ���
��� ��� ���
� � � �� � � �
����
��� ��� ��� ���
��� ��� ��� ���
� � � � �� � � � �
����
��� � �
��� � �
� � �� � �
� � ��������������� �������
����� ����� ����������������������������������������������������
��������������� �������� ��� ����������� ��� ����������� ������������� ��� �������������� ��� ��������� �������� ������ ���� ����� ��� ��������� ��� ����������
������������������������������
� ����� ���������������������������������������������������������
���������������������������������������������������������������������������
��������
������������������������������������������������������������������
��������������������������
������
� ������
�����������
�������������������
�����������������
�
Y
X�
fR
fF
0.25 m
0.5 m
0.5 m
RR
RF
W mg=
mg cos �
mg sin �

�������� ����
������
������
�����������
�������������������
�����������������
��� ��
�����
�� ������
�
� ����� �
������
�����
��
���������� ����������
��
� ������
���
����� ��
���
��������������
�������������
���
���
��
��
�����
�����
������
� � �������
����� ���������������
�������������������������������������������������������������������������
�����������
������������ �
�������� ������ ����������������������������������������������������
����������������������������������������
���������������������������������
����������������������������������������������������� ������������������
���� �����������������������������
�����������������������������������
������������ ���������������������� ���������������������
�� ������ ���������������
L
L/2
RB
fA
RA
O
fB
BB
A
�
W

���� ���������������������
������ � �
�����
�
������ �����
�����
�
������������������������������� ������������������������������������
������
������������ ������������������������������������������������������������
����������������������������������������������������������������� ��������
������������������������ �� � � ������ ����������
��������� ������������������������������������������������������������
���
��������������������� ������
�������
� �����
�
������
�
�������
�������������
� ������
��������
������������ ��������������������������
��������������������
����� ���������� ��� ��
������������ ������������������������������������������������������
��������������������������������������������������������������� ����������
��������������������������� ����������
�� ��������������������������������������������
�� ��������������������������������������������������������������������
���������������� �� � � ����� ����������
RB
fA
RA
B
A 60°
300 N

�������� ����
��������� ���������������������������������
����������� ���������
��� �
�
��
�����
� � �������
���� ����
��������������������� ���������
������
� ����
�
������
���������� ����
�����
������
������ ������ ���
�����
���
� �� �� � ��
� �
�� � � � � � �
�
�����
��� �������� ����� ����
�������
� ��
�
�
��
��
��
����� ����
������ ���� ��������������������������������������������������������� ��������
������ ����������� ����� ����������� �����������������������������������������������
���������������������������������������� ��������������������������������� �
���������������� �����������������������������������������������������������
� ������������������������������������ ��������������������������
10 m
20 N
5m
RB
fA
RA
O
B
A�
6 m
8 m

���� ���������������������
��������� ��������������������������������������� ������ ����������������
��� �������
�����
�����������
�
�������
� ������
�
���� �������
������
����������������
������
�
������
��������
�
� ����������
�����
����
�
���
���������
� ��������
��������
����� �������
�����
�
���������������������� �������� �����������
���������
�������� ����������������������
������������������ ���������������������
����� ������������������� ������� �����������
��
�
��
������
����
��������
�������������������������� ������ �����
l
l/2
RB
fA
RA
O
fB
B
A
45°
W
1.5Wx

�������� ����
������������� ���������������������������� ��������������������������
�������������������������������������������������������������������������
��������������������������������� ������������������������� ��������������
�����������������������������������������������������������������������������������
������������������������������������������������������������������
������� � ������������������������������������������������ ����������������
�����
�� ������
�����
�
��� ������
����� ���� ����� ��
� �����
�����������
�
���� �
���� ������
����������� � ���
���������� ����� ����������� ����� ��������� �
�� ��������� � ���� ���������� ����� ���������� ���������� �
� � ��
�� � �� � �� �� �
�� � �� �
� � � �� �
��
�� ��
����
������� � �
����� ��������������
���������������������������������������������������������������������������
����� ��� �������������� ����������� ������ ����������� ����������������� ��������
7 m
3m
RB
fA
RA
O
B
A
60°
800 N
3.5
m
600 N

���� ���������������������
�������������������������������������������� ���������������� ����������
��������������������������������������������������������������
�� ����� ����� �������������� ����� ������ ����������� ���������� ������ ���
������ ����������������������������������������������������� ����
���������������������������������������� ������ ����������������������
������������������������������� ������������������������������������
��������
������� ���������� �� ��� ��������������������
�������
�� ���� ��
�����������������
�������
����
��������������������������������������������
����
��������� ��������������
�� ����������� ���������������
��� ���� �
������������
������������� � ������
���� ���� �
����������������
������������� � ������
��������������������������������������
��������� ������������
�f1
R1
N1W
��
R2
N2
f2
R2 cos ( + )�� R2 sin ( + )��
Y
X

�������� ����
�� �������������������������������������� �������������������� �����
����
������������������ ���������������������������������������������������������
�������������������������������� ������
�����������������������������������
�������������
� �����������������������������������������
�� �������
� ������� �������
��������������� �����
��� �������
�����������
��������������� ����
������������������������ ��������������������������
������������� ����������������������������������������������������������
��������������������������������������������������������������������������������������
�������������������������������������������������������������������������������
����������������������������������������������������������
���������
�� ��������������������������������������� �������������������������������
��������
�� ������
������������
���������������
� ��������
� �����
� �������������
� ������ �
� ���������� �����
��������������� �����
� � �� ��� �
�
��������� ������������
Y
X
R2
f2
N2
��
R2 sin ( + )��
R2 cos ( + )��
P
MotionN3R3
f3
�

���� ���������������������
���� �������
���������� �������
�����������������
��������������� ���������� ����
�����������������������
� ����� ���
����� �����
�������
� ������������������������������������ �� ���������� ����� �����������
�������
��� �������
������������������
���������������
���� �������
������������
�����������������
����������������������������������������
� ����������
� � ��������������������
�������
����������������������������������������
���������� ����
����� �������������
������������������������������������������������������������������������� �����
������ ���������������������� ��������������� ����� �������� �������������������
�� ��������������������������� ��������������������������������������������
������ ���
����
�� ����������������� ��������������������
����������������� ������ �������������
� ���� ��������������� ��������
� ������������������ �������
��������� ����������
Slack side
Tight side
T2
T1
r1
r2
Driver
Follower

�������� ����
������������������ ���������
��������
��������� ����������������������������
�������
����������������� ���������
�����
������������� ����������������������������������������� �����������������������
������
��� ��������������� ����������������������������
���� �������������������
����� ���������������� ��������������������
��������� ���� ������������������������������������� ������������������������
��������������������������������������������������
��������� ������������������
�����
� ��������������������
� ������������������������
� ����������������������� ���������������
���������������������������� ��������� ���������������������������������������� ������������������������� ��������������������� � ��
� ����������������� �������������������������
������ ������������� �������������������������
�� ����������������������������������
�� ������������� �����
� ������������������
������
� �������������������������� ������� ��������������
� d �
T1T2
�r
�

���� ���������������������
� �
�
�
�
�������
� ����
�
�����
�
���
�
�����
����������
������ ���������
� �
������������ ���������������� ����
�������� ���� ������������������������������������������������������������
����������������������������� ����������������������������������������������������
�������������� ��������������������������������������������������������
������ ��������������������������������������� ��
�
�
�
�
�����
� ����
���
���
������� �
������������ � ��
��
����������
���
����
� �� �� �
�����
��
������������
� ������������������ � ���������
� �������������� �����
�� ���� ����
�������� ���� �������������������������������� �������������������������
�������������������������������������������������������������������������
���������������������������������������������������������������������������
���������������������� ���������������������������������������������������������
�������
������ ������������������
� ����������������
� ����������������
� ��������������
���
��
��������������
� ������������
������������
� �����
� ������ ���

���� ���������������������
������������
��������������������������
������� �� ��������
��
�
�
�����������������
�
�
�������������� ����
�������� ���� ���� ��������� ������������� ����� ������������ ������
�� ���� �������������� ����������������������� ����������� ����������� ����
�������������� ������������������������ ��������������������������������
����������������������������������������� ��������������� ���������� ��
������������������������������������������������������
������������������������
������ ����
������
� ���
� �����
� �
�
�
�
���������
������������
�����������
�
�� �� ��������
���
��� ��������������
��������
���������
�����������
���������
���������������� ������������
������������������������������
����� � �� ����
�������� ���� �������������� ������ ���� ����� �������������� ���� �� ��
� ��������������������������������������������� ������������ ������
��������������������������� ��� ��������������������������� ������
�������������������� ������������� �����������������������
������������������������
T2 T1
0.5 m

�������� ����
� �����
�������������������������
������
������������������
������������
���� �������
������
����������������
�����
����� ������������������������� �������������
����� ���
� � �������� ����
����� ��������������
���������������������������������������������������������������������������
�������������������������������������������������� �������������������������
�����������������������������������������������������������������������������
�����������������������������������������������������������������������������
������������� �������������������������������������������������������������
����������������������������������������������������������������������������
���������������������������������������������������������������������������������
�������������� ������������ ������������������������ ��� ����������� ��
�����������������������������������������������������������������������������
����������������������������������������������� ���������������
����� ��
�
�
��
����� �����������������������������
� ����������������
���������������������� ������������������������������������������������
��������� ����������
RW
P
p
�dm
�

�������� ����
����� ��
��� �
��� ��� �
� � � � ��� � � ��
���
���
��� ��� � �
�� � � �
��
����
���� ��� �
�� � � ��
���� ������������ �������������������������
� ����� ��
����
��� �� ���
�� � �� � �
�� ������������������������������������������������
� �������������������������������
� ��������� �����
�� ���������
� �� ��
�
� �
���
���
�
����
������������������������ ������������������������ ��������
������������� ���������������������������������� ����������������
����
��
� ���
� ���
� �� �
�������� ��
�
�� �� �� �� �
��� �� ������������������������������������������ �������
������
����
����
�
���
���
��� � �
�� � �
�� �������������������
� ��������
�
�
� ����
��
��� ��
��� ��
�� �� �� �� ��� �� �� � �� �� �� �
���
��� ��
��� ��
�� �� �� �� ���� �� �� �� ��
��
��� �� ��� ��
� ��� �� ��� ��
��� �� ��� ��
� ��� �� ��� ��
� � �� � �
� � �� � �
���
� ��� ��
� ��� ��
� ��� ��
� ��� ��
� �� �� �� �

���� ���������������������
����
��
�
�
�� ��� ��
�� ��� ���
� ��� �
���
�
�
��� ��
�
��� ��
��� ��
�
��� ��
� ���� ��� �
� ���� ��� �
� ����
��
�
�
��� ���
� �
��� ���
� �
� �� ��� �� �
� �� ��� �� �
��
� �
� �
��� ��� ���� ���
� � � �
��� ��� ���� ���
� � � �
� � � �� �
� � � �� �
��
� ���� ���
� �
� ���� ���
� �
� ��
� ��
���
� ���
� ���
� �� �
����� ������
������������� ����������������������������������������������������������
�������������������������������������������������������������������������������
�������������������������������������������������������� �������������������
������ ���� ���� ��� ������������������������ ��� ���������� �� �� �������� ��
������������������������ ����������� ���������
���������
���� � ������� ��������������
����� � ��������
�������� � ��������������
����������������� � ��
�� ��
�
��������
� �����
� �������
��������������������
����� ��
�
�
����
���
� �� �����������
� � ��������






























