Embed Size (px)
Citation preview

Control Engineering Practice 8 (2000) 1167}1176
Experimental evaluation of an augmented IMC for nonlinear systems
Q. Hu, P. Saha, G. P. Rangaiah*,1
Department of Chemical and Environmental Engineering, The National University of Singapore, 119260, Singapore
Received 13 September 1999; accepted 6 March 2000
Abstract
Performance of internal model control (IMC), which is a!ected by the inevitable errors in the model used, can be improved by
augmented IMC (AuIMC) having an additional feedback of process/model mismatch through a suitable gain. This paper presents
a detailed study on real-time control of an open-loop stable single-input}single-output (SISO) nonlinear system by AuIMC. The
AuIMC structure is "rst analyzed theoretically to show its robustness and performance characteristics, followed by its experimental
evaluation on pH control of a neutralization process. The experimental results show that signi"cantly improved control is obtained by
the AuIMC compared to the standard IMC. ( 2000 Elsevier Science Ltd. All rights reserved.
Keywords: Nonlinear systems; Internal model control; Input}output linearization; Augmented internal model control; Neutralization process; pH
control
1. Introduction
Several industrially important processes such as high-
purity distillation columns, exothermic chemical reac-
tions, neutralization processes, etc., exhibit nonlinear
dynamic characteristics. Improved and robust control of
these processes is becoming necessary due to increasing
competition and environmental considerations. Also, the
availability of advanced technology and inexpensive
computing power are a boon for design and implementa-
tion of advanced control strategies. Many control tech-
niques have been proposed and analyzed for nonlinear
processes, and a good review of these is available in
Bequette (1991). Linear Internal model control (IMC) as
a general structure (Garcia & Morari, 1982) that uses a
model in parallel with the process, has become very
popular among practising engineers. The linear IMC
scheme has been extended to its nonlinear version by
employing an approximate inverse of the model through
a formulation similar to Newton's method using local
linear approximation (Economou, Morari & Palsson,
1986); Hirschorn inverse along with a nonlinear "lter
(Henson & Seborg, 1991); and quadratic perturbation
1This paper was written when the author was at Curtin University of
Technology, Western Australia as visiting Professor.
*Corresponding author. Tel.: #65-874-2187; fax: #65-779-1936.
E-mail address: [email protected] (G. P. Rangaiah).
model (Patwardhan & Madhavan, 1998). Kulkarni,
Tambe, Shukla and Deshpande (1991) proposed a di!er-
ent methodology based on the similarity between the
model and its inverse for designing a nonlinear IMC
controller, and proved its capabilities for pH control via
simulation. Brown, Lightbody and Irwin (1997) proposed
a nonlinear internal model control using local model
networks, which are represented by a set of locally valid
sub-models across the operating point.
Nevertheless a key issue in IMC application is the
mismatch between the process and the model used in the
strategy. In practical situations where modelling
errors are inevitable, the performance of the IMC system
may become poor and unacceptable. The two main ap-
proaches for reducing the e!ect of process-model mis-
match are parameter adaptation (e.g., Sastry & Isidori,
1989; Shukla, Deshpande, Ravikumar & Kulkarni 1993;
Hu & Rangaiah, 1999a) and additional feedback loop
(Zhu, Hong, Teo & Poo 1995; Wu, Hwang & Chuang
1996; Hu & Rangaiah, 1999b). Zhu et al. (1995) proposed
an enhanced IMC where the di!erence between the plant
and model outputs was fed back via an additional con-
troller and added to the manipulated variable of the
process. Wu et al. (1996) added an external loop to
modify the control action of the conventional-feedback
control system. Both these studies have mainly con-
sidered linear systems. Hu and Rangaiah (1999b) studied
two strategies* adaptive IMC (AdIMC) and augmented
IMC (AuIMC) for improving the nonlinear IMC for pH
0967-0661/00/$ - see front matter ( 2000 Elsevier Science Ltd. All rights reserved.
PII: S 0 9 6 7 - 0 6 6 1 ( 0 0 ) 0 0 0 4 1 - 1

Nomenclature
d disturbance vector
e error signal
f, g vector "elds
fa
augmented feedback
G transfer function
h output function
K tuning parameter of AuIMC
¸ifh ith-order Lie derivative of a scalar function,
h with respect to a vector function, f
M model
pH potential of hydrogen
pK log of equilibrium constant
P process
r reference input
u manipulated variable
v transformed input
< volume of tank
=a
reaction invariant a
=b
reaction invariant b
x state variables
y controlled output
Greek letters
ai
controller tuning parameter
b AuIMC tuning parameter
c relative degree
m transformed state variable
Subscripts
A AuIMC
d disturbance
control via simulation. The latter structure consists of
IMC and an additional feedback, where the di!erence
between the plant and model outputs is fed back with
a gain and added to the input of the controller. Consider-
able improvement in controller performance was ob-
tained using AuIMC rather than standard IMC in the
simulation study of Hu and Rangaiah (1999b). In this
paper, AuIMC is further studied and evaluated experi-
mentally for real-time control of a neutralization process.
Of particular interest is the signi"cant improvement in
control that can be easily achieved due to the additional
feedback, under practical conditions.
2. Development of a nonlinear internal model control
For completeness, development of a nonlinear IMC
and AuIMC is brie#y described in this section and
the next section. Consider a single-input}single-output
nonlinear system, P described by
x5 "f (x)#g(x)u,
y"h(x), (1)
where x3Rn, u3R1, y3R1, and f (x), g(x) and h(x) are
assumed to be smooth functions. If the relative degree,
c of system is well de"ned, the state feedback control law
u"v!¸c
fh
¸g¸c~1f
h(2)
yields the linear closed-loop system
y(c)"v, (3)
where v is the transformed inputs to the control system.
Imposing on this system a feedback control of the form
v"!ac¸c~1f
h(x)!ac~1
¸c~2f
h(x)!2
!a1h(x)#a
1r, (4)
where r is the reference input and a are the tuning
parameters, yields an overall closed-loop system charac-
terised by the equation of the form
mQ "C0 1 0 2 0
0 0 1 2 0
. . . 2 .
0 0 0 2 1
!a1
!a2
!a3 2 !a
c
D m#C0
0
.
0
a1
D r, (5)
y"[1 0 0 2 0]m,
where m is the transformed state variable as
m"[h(x) ¸fh(x) 2 ¸c~1
fh(x)]T. (6)
If the zero dynamics of the system are asymptotically
stable, and the tuning parameters ai, i"1, 2, c, in
Eq. (4) are chosen such that sc#acsc~1#2#a
2s#a
1(where s is the Laplace transform operator) is a Hurwitz
polynomial, the system is locally and asymptotically
stable (Kantor, 1986; Isidori, 1995). The controller in Eq.
(2) is not suitable for controlling real processes since it
requires all state variables and the absence of integral
action does not ensure o!set-free performance (Kravaris
& Kantor, 1990). Further modelling errors are unavoid-
able, which may lead to o!set or deviation from the
speci"ed closed-loop dynamics. To avoid all these
problems, an IMC structure (Fig. 1) was suggested (e.g.,
Henson & Seborg, 1991; Hu & Rangaiah, 1999a). In this
structure, the control law is given by
u"v!¸c
8
fIh3
¸g8¸c
8 ~1fI
h3, (7)
1168 Q. Hu et al. / Control Engineering Practice 8 (2000) 1167}1176

Fig. 1. Nonlinear IMC.
Fig. 2. Structure of augmented IMC.
Fig. 3. Equivalent structure of AuIMC.
where
v"!ac8 ¸c
8 ~1fI
h3 (x8 )!ac8 ~1
¸c8 ~2fI
h3 (x8 )!2
!a1h3 (x8 )#a
1r6 (8)
and &˜' represents the model. Comparing Eqs. (7) and (8)
with (2) and (4), respectively, it can be seen that the
system equations are replaced by the model equations,
and the input to the controller is r6 "r!y#y8 (Eq. (8))
and not r.
3. Augmented internal model control
If there are errors or uncertainties in the model, the
performance of the IMC (Fig. 1) may not be satisfactory.
To make IMC robust, Hu and Rangaiah (1999b) de-
veloped an augmented internal model control (AuIMC)
shown in Fig. 2, and applied to pH control via simula-
tion. The AuIMC is composed of the original IMC and
an additional loop where the information on process-
model mismatch is fed back through a compensation
controller K, and added to the input of the controller
manipulating the input to the process. That is, control
action to the model, u.
is still Eq. (7), while the control
action to the process, u1
is also Eq. (7) but with v replaced
by
vA
"!ac8 ¸c
8 ~1fI
h3 (x8 )!ac8 ~1
¸c8 ~2fI
h3 (x8 )!2!a1h3 (x8 )
#a1(r6 !f
a), (9)
where
fa"K(y!y8 ). (10)
Comparing Eq. (9) with Eq. (8), only the last term is
di!erent. By inserting the additional path, the output of
the original IMC controller to the process is augmented
by the additional control action generated from the pro-
cess-model error, y!y8 .In Fig. 1, the dynamics between r6 and y8 can be repre-
sented by a linear transfer function, GI (s) because of input-
output linearization,
GI (s)"y8 (s)r6 (s)
"a1
sc8 #ac8 sc
8 ~1#2#a2s#a
1
. (11)
The dynamics between r6 and y can also be represented by
a linear transfer function, G(s) which is dependent on the
operating point, i.e., G(s) may change with the operating
point. Thus, the AuIMC in Fig. 2 can be represented in
the equivalent form (Fig. 3) where
GA(s)"[1#KG(s)]~1G(s)[1#KGI (s)], (12)
dA(s)"[1#KG(s)]~1d(s), (13)
Assuming that G(s)"Z(s)/N(s) and GI (s)"ZI (s)/NI (s),
GA(s) and d
A(s) are given by
GA(s)"
Z(s)[N(s)#KZI (s)]
NI (s)[N(s)#KZ(s)], (14)
dA(s)"
N(s)
N(s)#KZ(s)d(s). (15)
If the original IMC is stable, i.e., the process, the model
and the IMC controller are stable, then the stability
of the AuIMC depends on the stability of GA(s) whose
characteristic equation is
NI (s)[N(s)#KZ(s)]"0. (16)
Q. Hu et al. / Control Engineering Practice 8 (2000) 1167}1176 1169

Hu and Rangaiah (1999b) studied the performance of
AuIMC, where K is a pure proportional controller, in
their simulation of a strong acid strong base pH control
system. In this study,
K"1
a1
(b1#b
2s#2#b
csc~1) (17)
is chosen.
Theorem 1. Both IMC and AuIMC provide owset-free
performance.
Proof. The dynamic behaviour between r6 and y8 for both
IMC and AuIMC (see Figs. 1 and 3) is Eq. (11), i.e.,
limt?=
y8 (t)"limt?=
r6 (t). Since r6 "r!y#y8 (Figs. 1
and 3), it follows that limt?4
y(t)"r. h
Theorem 2. The AuIMC is stable if for 1)i)c, bi)bH
i,
where bHi
is the value of bi
at the crossover point of the
root locus of equation N(s)#KZ(s)"0 with bi
as the
parameter.
Proof. The characteristic equation of GA(s) is Eq. (15),
and NI (s) is a stable polynomial since GI (s) is stable. Hence,
only that N(s)#KZ(s) is a stable polynomial for the
stability of AuIMC needs to be proved. Because G(s) is
stable, the roots of G(s) are in the left half of the s-plane,
and so root locus of equation N(s)#KZ(s)"0 starts in
the left half of the s plane. For bi)bH
i, the root locus of
equation N(s)#KZ(s)"0 must lie in the left half of
s-plane, and therefore N(s)#KZ(s) is a stable poly-
nomial. Hence the AuIMC is stable. Thus, if the original
nonlinear IMC control system is stable, there always
exists a K for which the AuIMC is stable. h
Theorem 3. The uncertainties in the process are reduced in
the AuIMC compared to the original IMC.
Proof. For the original IMC, G(s) can be represented as
(Morari & Za"riou, 1989)
G(s)"[I#l.(s)]GI (s)#l
!(s), (18)
where lm(s) and l
!(s) respectively, are the multiplicative
and additive uncertainty. For the AuIMC shown in
Fig. 3, GA(s) can be obtained after some manipulation as
GA(s)"M1#[1#KG(s)]~1l
.(s)NGI (s)
#[1#KG(s)]~1l!(s). (19)
By comparing the corresponding terms in Eq. (19) with
those in Eq. (18), it can be seen that both the multiplica-
tive and additive uncertainties existing in the process, are
reduced in the AuIMC if E[1#KG(s)]~1E=
)1. It can
be seen that if G(s) is stable and minimum phase, then
E[1#KG(s)]~1E=
)1. This reduction in the AuIMC
can be expected to improve the robustness of the control
system. h
Theorem 4. The ewect of external disturbance, d, on the
process is reduced in the AuIMC compared to the original
IMC.
Proof. The disturbance transfer function, G$(s) between
d and y for the original IMC can be derived as
G$(s)"[1!GI (s)][1#G(s)!GI (s)]~1. (20)
For the AuIMC, the corresponding disturbance transfer
function, GA$
(s) can be shown to be
GA$
(s)"[1!GI (s)][1#(1#K)G(s)!GI (s)]~1. (21)
From Eqs. (20) and (21), it can be seen that the e!ect of
external disturbance is reduced in the AuIMC compared
to the original IMC. h
It can be seen that if the model is perfect, GA(s)"G(s)
and
N(s)#KZ(s)
"sc#(ac#b
c)sc~1#2#(a
1#b
1). (22)
This means that bi, 1)i)c, can be chosen so that the
poles of Eq. (15) are far placed in the left of s plane, and
the e!ect of disturbance of the system will be reduced
quickly. The above analysis shows the bene"t of augmen-
tation in the AuIMC. Application of the AuIMC to an
experimental process follows in the next section.
4. Application to a neutralization process
4.1. Experimental set-up
The experimental set-up (Fig. 4) consists of a continu-
ous-stirred tank reactor (CSTR) of capacity 400 ml, three
supply tanks (each of 50 l capacity) with associated pip-
ing, a rotameter, two #ow sensors, two motor-operated
control valves, a manually operated valve, pumps, a pH
electrode, a pH meter, two transmitters, an analog-to-
digital and digital-to-analog conversion (AD/DA) card,
an extension board, a personal computer and a printer.
Three liquid streams * an acid #ow (q1), a bu!er #ow
(q2), and a base #ow (q
3), are pumped into the CSTR.
A #ow sensor and a control valve are installed on each of
the acid and base lines for monitoring and control.
A rotameter (20}240 cm3/min) is used to monitor the
#ow rate of the bu!er. In the present study, pH is the
process variable to be controlled by manipulating
the acid #ow rate. The base and bu!er #ow rates act as
unmeasured disturbances. An over#ow is arranged to
ensure constant volume of the CSTR, and a mechanical
stirrer operating at 500 rpm is provided for good mixing.
The pH at the outlet of the CSTR is monitored using
a pH electrode and a pH meter with automatic temper-
ature compensation. The meter converts the signal from
1170 Q. Hu et al. / Control Engineering Practice 8 (2000) 1167}1176

Fig. 4. Experimental set-up for pH control.
the electrode into a current signal of 4}20 mA, which
itself is converted to voltage signal of 0}10 V in the
extension board. Of the 16 input and 2 output channels
in the AD/DA converter, three input channels are used to
read pH, acid and base #ow rates, and one analog output
port is used to send the controller output signal from the
computer to the acid control valve through a transmitter
which converts the 0}10 V into a 4}20 mA signal suitable
for operating the motorised acid control valve. The in#u-
ent base valve is operated via keyboard through another
analog output port and a transmitter. The data acquisi-
tion and control are all carried out on-line using a per-
sonal computer (PentiumII/300) which serves to acquire
and display data, introduce a step disturbance of desired
magnitude and compute the controller output. The con-
trol objective is to maintain pH at the speci"ed set point
of 7 despite unmeasured disturbances in bu!er and/or
base #ow. At steady state in automatic mode, base #ow
disturbance is introduced by changing the output to the
base control valve through the keyboard, and bu!er #ow
disturbance via the manually operated valve.
4.2. Process model
The neutralisation process essentially involves a strong
acid, a bu!er and a strong base. Dilute acid and base
streams were employed for safety and environmental
reasons. Nominal inlet stream compositions were:
0.004 M nitric acid (HNO3) as the acid stream (q
1),
0.003 M sodium bicarbonate (NaHCO3) as the bu!er
stream (q2), and the base stream (q
3) consisted of a mix-
ture of 0.003 M sodium hydroxide (NaOH) and 0.0005 M
NaHCO3. The dynamic model of the pH neutralisation
system (CSTR) is derived using conservation equations
and equilibrium relations (Hall & Seborg, 1989). Model-
ling assumptions include perfect mixing, constant density
and complete solubility of the ions involved. The chem-
ical reactions in the neutralisation process are
H2O H OH~#H`, (23)
H2CO
3H HCO~
3#H`, (24)
HCO~3
H CO2~3
#H`. (25)
The equilibrium constants for the three reactions are,
respectively,
K8
"[H`][OH~], (26)
Ka1
"[HCO~
3][H`]
[H2CO
3]
, (27)
Ka2
"[CO2~
3][H`]
[HCO~3]
. (28)
The neutralisation process is modelled using the reaction
invariant approach (Gustafsson & Waller, 1983). For the
experiment, two invariants are de"ned for each inlet
stream (i"1}3):
=ai
"[H`]i![OH~]
i![HCO~
3]i!2[CO2~
3]i, (29)
=bi
"[H2CO
3]i#[HCO~
3]i#[CO2~
3]i. (30)
The =a
is charge related whereas =b
represents the
concentration of ions containing CO2~3
ion. Unlike pH,
these invariants are independent of the extent of the
reactions in Eqs. (23)}(25) and are conserved quantities.
Assuming the reactions are su$ciently fast so that the
system is at equilibrium, hydrogen ion concentration in
a stream can be determined from =a
and =b, and the
equilibrium relations (Eqs. (26)}(28)):
=b
(Ka1
/[H`])#(2Ka1
Ka2
/[H`]2)
1#(Ka1
/[H`])#(Ka1
Ka2
/[H`]2)#=
a
#(K8/[H`])![H`]"0 . (31)
Q. Hu et al. / Control Engineering Practice 8 (2000) 1167}1176 1171
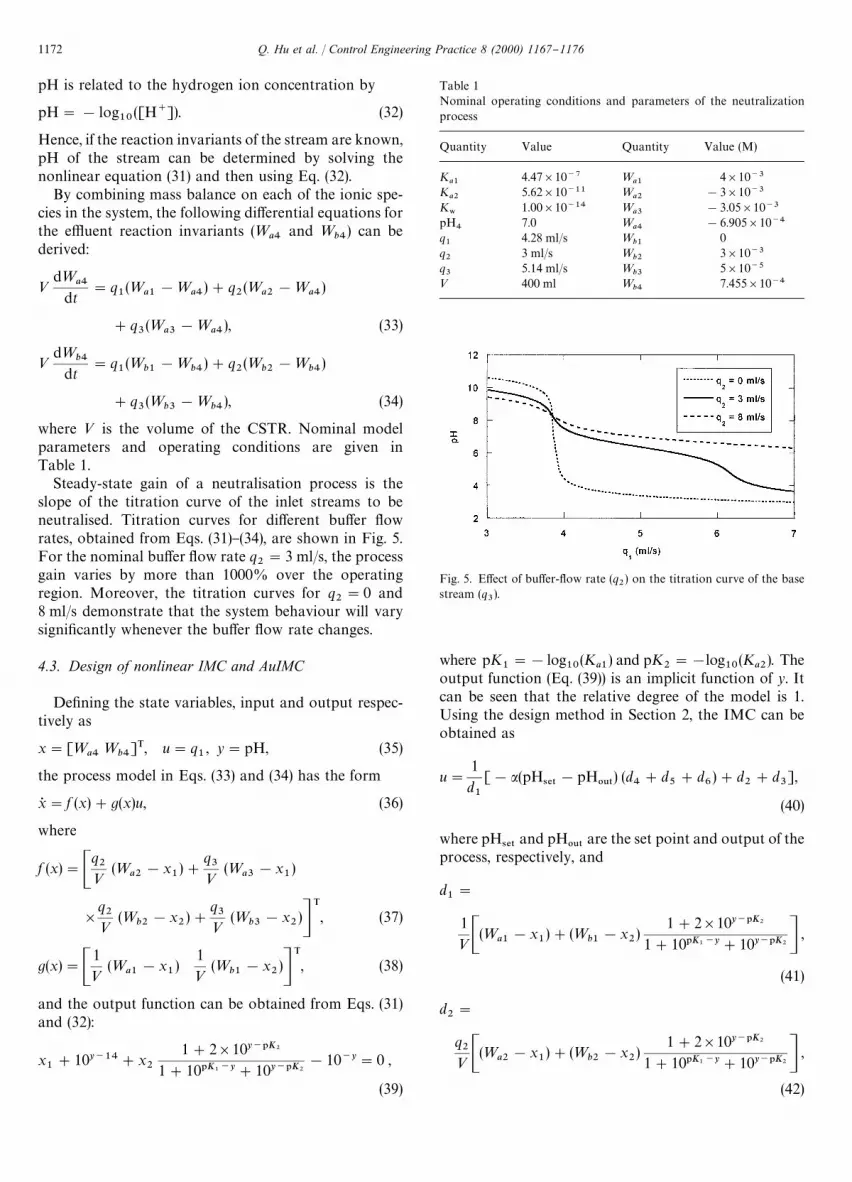
Table 1
Nominal operating conditions and parameters of the neutralization
process
Quantity Value Quantity Value (M)
Ka1
4.47]10~7 =a1
4]10~3
Ka2
5.62]10~11 =a2
!3]10~3
K8
1.00]10~14 =a3
!3.05]10~3
pH4
7.0 =a4
!6.905]10~4
q1
4.28 ml/s =b1
0
q2
3 ml/s =b2
3]10~3
q3
5.14 ml/s =b3
5]10~5
< 400 ml =b4
7.455]10~4
Fig. 5. E!ect of bu!er-#ow rate (q2) on the titration curve of the base
stream (q3).
pH is related to the hydrogen ion concentration by
pH"!log10
([H`]). (32)
Hence, if the reaction invariants of the stream are known,
pH of the stream can be determined by solving the
nonlinear equation (31) and then using Eq. (32).
By combining mass balance on each of the ionic spe-
cies in the system, the following di!erential equations for
the e%uent reaction invariants (=a4
and =b4
) can be
derived:
<d=
a4dt
"q1(=
a1!=
a4)#q
2(=
a2!=
a4)
#q3(=
a3!=
a4), (33)
<d=
b4dt
"q1(=
b1!=
b4)#q
2(=
b2!=
b4)
#q3(=
b3!=
b4), (34)
where < is the volume of the CSTR. Nominal model
parameters and operating conditions are given in
Table 1.
Steady-state gain of a neutralisation process is the
slope of the titration curve of the inlet streams to be
neutralised. Titration curves for di!erent bu!er #ow
rates, obtained from Eqs. (31)}(34), are shown in Fig. 5.
For the nominal bu!er #ow rate q2"3 ml/s, the process
gain varies by more than 1000% over the operating
region. Moreover, the titration curves for q2"0 and
8 ml/s demonstrate that the system behaviour will vary
signi"cantly whenever the bu!er #ow rate changes.
4.3. Design of nonlinear IMC and AuIMC
De"ning the state variables, input and output respec-
tively as
x"[=a4=
b4]T, u"q
1, y"pH, (35)
the process model in Eqs. (33) and (34) has the form
x5 "f (x)#g(x)u, (36)
where
f (x)"Cq2<
(=a2
!x1)#
q3<
(=a3
!x1)
]q2<
(=b2
!x2)#
q3<
(=b3
!x2)D
T, (37)
g(x)"C1
<(=
a1!x
1)
1
<(=
b1!x
2)D
T, (38)
and the output function can be obtained from Eqs. (31)
and (32):
x1#10y~14#x
2
1#2]10y~1K2
1#101K1~y#10y~1K2!10~y"0 ,
(39)
where pK1"!log
10(K
a1) and pK
2"!log
10(K
a2). The
output function (Eq. (39)) is an implicit function of y. It
can be seen that the relative degree of the model is 1.
Using the design method in Section 2, the IMC can be
obtained as
u"1
d1
[!a(pH4%5
!pH065
) (d4#d
5#d
6)#d
2#d
3],
(40)
where pH4%5
and pH065
are the set point and output of the
process, respectively, and
d1"
1
<C(=a1!x
1)#(=
b1!x
2)
1#2]10y~1K2
1#101K1~y#10y~1K2D ,
(41)
d2"
q2< C(=a2
!x1)#(=
b2!x
2)
1#2]10y~1K2
1#101K1~y#10y~1K2D ,
(42)
1172 Q. Hu et al. / Control Engineering Practice 8 (2000) 1167}1176

Fig. 6. Open-loop responses to $20% step change in the acid-#ow
rate (q1).
d3"
q3< C(=a3
!x1)#(=
b3!x
2)
1#2]10y~1K2
1#101K1~y#10y~1K2D ,
(43)
d4"[e(y~14) -/ 10#e~y -/ 10 ] ln 10, (44)
d5"
2x2e(y~1K2 ) -/ 10(1#101K1~y#10y~1K2 ) ln 10
(1#101K1~y#10y~1K2)2, (45)
d6"
x2(1#2]10y~1K2)[e(1K1~y) -/ 10!e(y~1K2 ) -/ 10] ln 10
(1#101K1~y#10y~1K2)2.
(46)
There is only one tuning parameter (a) in the controller
equation (40). Based on the derivation of Section 3, the
control action for the AuIMC is
u"1
d1
[!a(pH4%5
!pH065
!f ) (d4#d
5#d
6)
#d2#d
3], (47)
where
f"K(pH065
!y). (48)
Note that all quantities (except pH065
) in the equations in
this section refer to the model and/or the controller.
4.4. Results and discussion
The open-loop responses to$20% step changes in the
acid #ow are shown in Fig. 6. Although the step changes
are symmetrical, experimental pH responses are highly
asymmetric due to the large variation in the process gain.
The tuning parameter, a was selected as 130
, i.e, the closed-
loop time constant in the nonlinear IMC controller was
selected as 30 s, which is approximately one-half of the
open-loop time constant for the !20% change in the
acid #ow rate (Fig. 6). A smaller closed-loop time con-
stant could result in instability of the IMC system. For
the AuIMC, K"30 (i.e., b1"1) was selected after a few
preliminary trials. Sampling period for control was 1 s
in all cases. The di!erential equations of the model
(Eqs. (33) and (34)) were solved using fourth-order
Runge}Kutta method and a constant step size of 0.1 s.
All programs for data acquisition and control were writ-
ten using C## language.
To ascertain the superior control o!ered by the
AuIMC, tests with PI controller of the form K#(1#1/
¹Is) were also conducted and the corresponding experi-
mental results are presented besides those for the nonlin-
ear IMC (i.e., without augmentation). The PI controller
was tuned to provide stable response for the most severe
disturbance tried, namely, the bu!er #ow rate change
from q2"3 to 0 ml/s. The "nal values of the tuning
parameters are K#"!0.5 ml/s and ¹
I"100 s. The set
point tracking of the PI, IMC and AuIMC controllers is
shown in Fig. 7. The response of PI control to the
set-point change is extremely sluggish. Although both
IMC and AuIMC track the set point change quickly, the
tracking by AuIMC is faster, but it needs a greater
control action. IMC and AuIMC controllers should have
the same performance for set point changes in the ab-
sence of modelling errors and disturbances. In Fig. 7,
since IMC and AuIMC give di!erent performances, this
indicates the discrepancy between the model developed
in Section 4.3 and the real process.
The regulatory performance of PI, IMC and AuIMC
controllers for bu!er #ow rate change from 3 to 8 ml/s as
shown in Fig. 8. The AuIMC is able to reject the distur-
bance very e!ectively. Compared with the PI controller,
IMC gives better regulatory performance. Like the set
point tracking behaviour, the regulatory performance
of the PI controller is very sluggish. Control moves in
Fig. 8 show that AuIMC takes appropriate control ac-
tion quickly. The regulatory performance of the control-
lers for a bu!er #ow rate disturbance from 3 to 0 ml/s is
shown in Fig. 9. This is a di$cult situation to control,
since the process gain is very high. All the three control-
lers are able to control the pH at its set point. As ex-
pected, the nonlinear IMC and AuIMC outperform the
PI controller (Fig. 9), and AuIMC provides better control
than the nonlinear IMC.
Performance of the three controllers for unmeasured
disturbances in the base #ow rate are shown in Figs. 10
and 11. pH responses for a#50% base #ow rate distur-
bance (Fig. 10) demonstrate that AuIMC provides su-
perior control compared to the IMC and PI controller.
Both PI and IMC allow large pH deviations from the set
point and are sluggish. Relative performance of the three
Q. Hu et al. / Control Engineering Practice 8 (2000) 1167}1176 1173

Fig. 7. Performance for a setpoint change from pH"7}9: (a) control-
led variable and (b) manipulated variable.
Fig. 8. Performance for a bu!er #ow rate change from 3 to 8 ml/s: (a)
controlled variable and (b) manipulated variable.
Fig. 9. Performance for a bu!er #ow rate change from 3 to 0 ml/s: (a)
controlled variable and (b) manipulated variable.
Fig. 10. Performance for a #50% base-#ow rate disturbance: (a)
controlled variable and (b) manipulated variable.
1174 Q. Hu et al. / Control Engineering Practice 8 (2000) 1167}1176

Fig. 11. Performance for a !50% base-#ow rate disturbance: (a)
controlled variable and (b) manipulated variable.
Table 2
Control performance in terms of IAE for unmeasured disturbances
Unmeasured disturbance IAE for control by
PI IMC AuIMC
Bu!er #ow change from 3 to 8 ml/s 556 398 103
Bu!er #ow change from 3 to 0 ml/s 109 54 34
Base #ow change by #50% 548 245 138
Base #ow change by !50% 317 175 62
controllers to a !50% acid #ow rate disturbance
(Fig. 11) is similar to that in Fig. 10.
Table 2 shows the control performance in terms of IAE
of the three controllers for the disturbances studied; IAE
was calculated until the "nal times shown in Figs. 8}11.
Since the response by PI has not often reached the "nal
steady state, actual IAE for this controller will be more
than the value in Table 2. Without considering this,
results in Table 2 indicate that IAE for IMC is about
half of that for PI. More importantly, the introduction
of augmentation as in AuIMC reduces IAE by IMC
even further by a factor 1.5 to 3 for unmeasured distur-
bances.
5. Conclusions
An AuIMC structure consisting of a standard IMC
and an additional feedback loop, is described for control
of SISO open-loop stable nonlinear systems. The AuIMC
was experimentally evaluated for control of a neutralisa-
tion process, and its performance was compared with
that of nonlinear IMC and PI controllers. A simple
process model and only the measured pH were used for
developing and implementing the nonlinear IMC and
AuIMC controllers, and no state variables were needed.
Experimental results for several unmeasured distur-
bances show that the nonlinear IMC outperforms the PI
controller and that the performance of AuIMC is signi"-
cantly superior to that of the nonlinear IMC. Reduction
in IAE values due to augmentation in AuIMC for un-
measured disturbances can be 40% or more, and yet
AuIMC requires very few computations in addition to
those for the nonlinear IMC. Apart from equipment
problems, no major di$culties were encountered in the
development and implementation of nonlinear IMC and
AuIMC for the neutralisation process.
References
Bequette, B. W. (1991). Nonlinear control of chemical processes:
A review. Industrial and Engineering Chemistry Research, 30,
1391}1413.
Brown, M. D., Lightbody, G., & Irwin, G. W. (1997). Nonlinear internal
model control using local model networks. IEE Proceedings Control
Theory and Applications, 144, 505}514.
Economou, C. G., Morari, M., & Palsson, B. O. (1986). Internal
model control: 5. Extension to nonlinear systems. Industrial
and Engineering Chemistry Process Design and Development, 25,
403}411.
Garcia, C. E., & Morari, M. (1982). Internal model control * I.
A unifying review and some new results. Industrial and Engineering
Chemistry, Process Design and Development, 21, 308}323.
Gustafsson, T. K., & Waller, K. V. (1983). Dynamic modelling and
reaction invariant control of pH. Chemical Engineering Science, 38,
289}398.
Hall, R. C., & Seborg, D. E. (1989). Modelling and self-tuning control of
a multivariable pH neutralisation process. Part 1: Modelling and
multiloop control. Proceedings of the American control conference,
Pittsburgh (pp. 1822}1827).
Henson, M. A., & Seborg, D. E. (1991). An internal model control
strategy for nonlinear systems. A.I.Ch.E. Journal, 37, 1065}1081.
Hu, Q., & Rangaiah, G. P. (1999a). Adaptive internal model control
of nonlinear processes. Chemical Engineering Science, 54,
1205}1220.
Hu, Q., & Rangaiah, G. P. (1999b). Strategies for enhancing nonlinear
internal model control of pH processes. Journal of Chemical Engin-
eering of Japan, 32, 59}68.
Isidori, A. (1995). Nonlinear control systems (3rd ed.). New York:
Springer.
Kantor, J. C. (1986). Stability of state feedback transformations for
nonlinear systems* some practical considerations. Proceedings of
the American Control Conference, Seattle (pp. 1014}1016).
Kravaris, C., & Kantor, J. C. (1990). Geometric methods for nonlinear
process control: 1. Background, 2. Controller synthesis. Industrial
and Engineering Chemistry Research, 29, 2295}2323.
Q. Hu et al. / Control Engineering Practice 8 (2000) 1167}1176 1175

Kulkarni, B. D., Tambe, S. S., Shukla, N. V., & Deshpande, P. B. (1991).
Nonlinear pH control. Chemistry and Engineering Science, 46, 995}1003.
Morari, M., & Za"riou, E. (1989). Robust process control. Englewood
Cli!s, NJ: Prentice-Hall.
Patwardhan, S. C., & Madhavan, K. P. (1998). Nonlinear internal
model control using quadratic perturbation models. Computers in
Chemical Engineering, 22, 587}601.
Sastry, S. S., & Isidori, A. (1989). Adaptive control of linearizable
systems. IEEE Transactions on Automatic Control, 34, 1123}1131.
Shukla, N. V., Deshpande, P. B., Ravi Kumar, V., & Kulkarni, B. D.
(1993). Enhancing the robustness of internal-model-based nonlinear
pH controller. Chemical Engineering Science, 48, 913}920.
Wu, W. T., Hwang, Z. P., & Chuang, I. H. (1996). Experimental
investigation of a robust control system based on the EMC struc-
ture. Journal of Processing Control, 6, 157}160.
Zhu, H. A., Hong, G. S., Teo, C. L., & Poo, A. N. (1995). Internal model
control with enhanced robustness. International Journal of Systems
Science, 26, 277}293.
1176 Q. Hu et al. / Control Engineering Practice 8 (2000) 1167}1176





























