Embed Size (px)
Citation preview

Evolutionary Dynamic Optimization of aContinuously Variable Transmission for
Mechanical Efficiency Maximization
Jaime Alvarez-Gallegos1, Carlos Alberto Cruz Villar1, and Edgar AlfredoPortilla Flores2
1 CINVESTAV-IPN,Electrical Engineering Department,
Apdo. Postal 14-740, 07300,Mexico DF, Mexico
jalvarez, [email protected] Universidad Autonoma de Tlaxcala,
Engineering and Technology Department,Calz. Apizaquito S/N Km. 15, 90300, Apizaco, Tlax. Mexico
Abstract. This paper presents a dynamic optimization approach basedon the differential evolution (DE) strategy which is applied to the con-current optimal design of a continuously variable transmission (CVT).The structure-control integration approach is used to state the concu-rrent optimal design as a dynamic optimization problem which is solvedusing the Constraint Handling Differential Evolution (CHDE) algorithm.The DE strategy is compared with the sequential approach. The resultspresented here demonstrate that the DE strategy is less expensive thanthe sequential approach from the computational implementation pointof view.
1 Introduction
The traditional approach for the design of mechatronic systems, considers themechanical behavior and the dynamic performance separately. Usually, the de-sign of the mechanical elements involves kinematic and static behaviors whilethe design of the control system uses only the dynamic behavior; therefore, froma dynamic point of view this approach cannot produce an optimal system behav-ior [1], [2]. Recent works on mechatronic systems design propose a concurrentdesign methodology which considers jointly the mechanical and control perfor-mances [3].
In this paper an alternative methodology to formulate the system designproblem of mechatronic systems is to state it in the dynamic optimization frame-work. In order to do so, the parametric optimal design and the proportional andintegral (PI) controller gains of a pinion-rack continuously variable transmission(CVT) is stated as a dynamic optimization problem (DOP). The kinematic and
A. Gelbukh, A. de Albornoz, and H. Terashima (Eds.): MICAI 2005, LNAI 3789, pp. 1093–1102, 2005.c© Springer-Verlag Berlin Heidelberg 2005
1094 J. Alvarez-Gallegos et al.
dynamic models of the mechanical structure and the dynamic model of the con-troller are jointly considered, besides a system performance criterion and a setof constraints which states the mechanical structure and the controller speci-fications. The methodology goal is to obtain a set of optimal mechanical andcontroller parameters which can produce a simple system reconfiguration.
Methods usually employed to solve the resulting DOP belong to the nonlinearprogramming field. However, these classical methods need a point to initializethe optimization search, then consequently the convergence of the algorithmdepends on the chosen point. Moreover, the nonlinear programming approachis able to produce only one possible solution. On the other hand, a recentlypopulation-based evolutionary optimization algorithm the so called DifferentialEvolution (DE) has been successfully applied on mechanical design optimization[4], [5]; however in these papers the mechanical design problem is stated as astatic optimization problem.
The DE strategy is very similar to standard evolutionary algorithms, themain difference is in the reproduction step. An arithmetic operator is used inthis step, which means that the DE algorithm can directly operate on genes(design variables). In this paper the DE algorithm named CHDE (ConstraintHandling Differential Evolution) presented in [11] is used, because the standardDE algorithms lack of a mechanism to bias the search towards the feasible re-gion in constrained spaces. The CHDE algorithm proposes a constraint-handlingapproach, which relies on three simple selection criteria based on feasibility tobias the search towards the feasible region. These constraint-handling approachproduces a very powerful search for constrained optimization problems.
The paper is organized as follows: In Section 2 the description and the dy-namic CVT model are presented. The design variable, performance criteria andconstraints to be used in the concurrent optimal CVT design are established inSection 3. A brief description of the algorithms used in this paper is presentedin Section 4. Section 5 presents some optimization results and discuss them.Finally, in Section 6 some conclusions and future work are presented.
2 Description and Dynamic CVT Model
Current research efforts in the field of power transmission of rotational propul-sion systems, are dedicated to obtain low energy consumption with high me-chanical efficiency. An alternative solution to this problem is the so called con-tinuously variable transmission (CVT), whose transmission ratio can be conti-nuously changed in an established range. A pinion-rack CVT which is a traction-drive mechanism is presented in [7], this CVT is built-in with conventional me-chanical elements as a gear pinion, one cam and two pair of racks. The conven-tional CVT manufacture is an advantage over other existing CVT’s.
In order to apply the design methodology proposed in this paper, the pinion-rack CVT is used. In [8] a dynamic model of a pinion-rack CVT is developed.Ordinary differential equation system (1) describes the CVT dynamic behavior.There, Tm is the input torque , J1 is the mass moment of inertia of the gear
Evolutionary Dynamic Optimization of a CVT 1095
pinion, b1 is the input shaft coefficient viscous damping, r is the gear pinion pitchcircle radius, TL is the CVT load torque, J2 is the mass moment of inertia of therotor, R is the planetary gear pitch circle radius, b2 is the output shaft coefficientviscous damping and θ is the angular displacement of the rotor. On the otherhand, L, Rm, Kb, Kf and n represent the armature circuit inductance, the circuitresistance, the back electro-motive force constant, the motor torque constant andthe gearbox gear ratio of the DC motor, respectively. Parameters rp, λ and bc
denote the pitch radius, the lead angle and the viscous damping coefficient ofthe lead screw, respectively. Jeq = Jc2 + Mr2
p + n2Jc1 is the equivalent massmoment of inertia and d = rp tan λ, is a lead screw function. Moreover, θR (t) =12 arctan
[tan
(2Ωt − π
2
)]is the rack angle meshing. The combined mass to be
translated is denoted by M and P = Tm
rptanφ cos θR is the loading on the gear
pinion teeth, where φ is the pressure angle. The state variables x1 = θ, x2 = i,x3 = e and x4 = e are the angular speed of the rotor, the input current of theDC motor, the CVT offset and the displacement speed of the offset, respectively.The control signal u (t) is the input voltage to the DC motor.
x1 =
TmA +[J1A
x3r sin θR
]x1
2
−[b2 + b1A
2 + J1Ax4r cos θR
]x1 − TL
J2 + J1A2
x2 =u (t) −
(nKb
d
)x4 − Rx2
L(1)
x3 = x4
x4 =
(nKf
d
)x2 −
(bl + bc
rpd
)x4 − Tm
rptanφ cos θR
M + Jeq
d2
y = x1
where
A = 1 +x3
rcos θR; θR (t) =
12
arctan[tan
(2x1t − π
2
)](2)
3 Concurrent Optimal Design
In order to apply the design methodology proposed in this work, two criteria areconsidered. The first criterion is the mechanical CVT efficiency which considersthe mechanical parameters and the second criterion is the minimal energy con-sumption which considers the controller gains and the dynamic system behavior.
3.1 Performance Criteria and Objective Functions
The performance of a system is measured by several criteria, one of the mostused criterion is the system efficiency because it reflects the energy loss. In thiswork, the first criterion used in order to apply the design methodology is the
1096 J. Alvarez-Gallegos et al.
mechanical efficiency criterion of the gear system. This is because the racks andthe gear pinion are the principal CVT mechanical elements.
In a previous work we have stated that in order to maximize the mechanicalCVT efficiency, the Φ1(·) function given by (3) must be minimized. Equation (3)states the design problem objective function, where N1, e and r represent the gearpinion teeth number, the CVT offset and the pitch pinion radius respectively.
Φ1(·) =1
N1
(2r + e cos θR
r + e cos θR
)(3)
On the other hand, in order to obtain the minimal controller energy, thedesign problem objective function given by (4) is used.
Φ2(·) =12
⎡
⎣−Kp(xref − x1) − KI
t∫
0
(xref − x1)d
⎤
⎦
2
(4)
In (4), a proportional and integral (PI) controller structure is used, this isbecause in spite of the development of many control strategies, the proportional,integral and derivative (PID) controller remains as the most popular approachfor industrial processes control due to the adequate performance in most of suchapplications.
3.2 Constraint Functions
The design constraints for the CVT optimization problem are proposed accordingto geometric and strength conditions for the gear pinion of the CVT.
To prevent fracture of the annular portion between the axe bore and the teethroot on the gear pinion, the pitch circle diameter of the pinion gear must be greaterthan the bore diameter by at least 2.5 times the module [10]. Then, in order toavoid fracture, the constraint g1 must be imposed. To achieve a load uniform dis-tribution on the teeth, the face width must be 6 to 12 times the value of the module[1], this is ensured with constraints g2 and g3. To maintain the CVT transmissionratio in the range [2r, 5r] constraints g4, g5 are imposed. Constraint g6 ensures ateeth number of the gear pinion equal or greater than 12 [1]. A practical constraintrequires that the gear pinion face width must be equal or greater than 20mm, inorder to ensure that, constraint g7 is imposed. To constraint the distance betweenthe corner edge in the rotor and the edge rotor, constraint g8 is imposed. Finallyto ensure a practical design for the pinion gear, the pitch circle radius must beequal or greater than 25.4mm, then constraint g9 is imposed.
On the other hand, it can be observed that J1, J2 are parameters which arefunction of the CVT geometry. For this mechanical elements the mass momentsof inertia are defined by (5), where ρ, m, N , h, emax, rc and rs are the materialdensity, the module, the teeth number of the gear pinion, the face width, thehighest offset distance between axes, the rotor radius and the bearing radius,respectively.
Evolutionary Dynamic Optimization of a CVT 1097
J1 =132
ρπm4 (N + 2)2 N2h; J2 = ρh
[34πr4
c − 166
(emax + mN)4 − 14πr4
s
]
(5)
3.3 Design Variables
In order to propose a vector of design variables for the concurrent optimal CVTdesign, the standard nomenclature for a gear tooth is used.
Equation (6) states a parameter called module m for metric gears, where dis the pitch diameter and N is the teeth number.
m =d
N=
2r
N(6)
The face width h, which is the distance measured along the axis of the gearand the highest offset distance between axes emax are parameters which definethe CVT size. The above design variables belong to the mechanical structure.On the other hand, the gain controllers belong to the dynamic CVT behavior.Therefore, the vector pi which considers mechanical and dynamic design varia-bles is proposed in order to carry out the concurrent optimal CVT design.
pi = [pi1, p
i2, p
i3, p
i4, p
i5, p
i6]
T = [N, m, h, emax, KP , KI ]T (7)
3.4 Optimization Problem
In order to obtain the optimal values of the mechanical CVT parameters andthe controller gains, we propose a dynamic optimization problem, as follows
minp∈R6
F (x, p, t) =
10∫
0
Φndt n = 1, 2 (8)
subject to
x1 =
ATm +[J1A
2x3p1p2
sin θR
]x2
1 − TL
−[b2 + b1A
2 + J1A2x4p1p2
cos θR
]x1
J2 + J1A2
x2 =u (t) − (nKb
d )x4 − Rx2
L(9)
x3 = x4
x4 =(nKf
d )x2 − (bl + bc
rpd )x4 − Tm
rptan φ cos θR
M + Jeq
d2
u(t) = −p5(xref − x1) − p6
t∫
0
(xref − x1)dt (10)

1098 J. Alvarez-Gallegos et al.
J1 =132
ρπp42 (p1 + 2)2 p2
1p3 (11)
J2 =ρp3
4
[3πr4
c − 323
(p4 + p1p2)4 − πr4
s
](12)
A = 1 +2x3
p1p2cos θR (13)
d = rp tanλ (14)
θR =12
arctan[tan
(2x1t − π
2
)](15)
g1 = 0.01 − p2 (p1 − 2.5) ≤ 0
g2 = 6 − p3
p2≤ 0
g3 =p3
p2− 12 ≤ 0
g4 = p1p2 − p4 ≤ 0
g5 = p4 − 52p1p2 ≤ 0 (16)
g6 = 12 − p1 ≤ 0g7 = 0.020 − p3 ≤ 0
g8 = 0.020 −[rc −
√2(p4 + p1p2)
]≤ 0
g9 = 0.0254 − p1p2 ≤ 0
4 Algorithms
In order to apply the design methodology, two solution algorithms to solve thedynamic problem given by (8)–(16) are used.
Differential Evolution. The Constraint Handling Differential Evolution(CHDE) algorithm is used in this paper. This algorithm proposes an approachbased on the idea of preserving the main DE algorithm and to add only a simplemechanism to handle the constraint.
In standard DE algorithms an arithmetic operator is used, this operatordepends on the differences between randomly selected pairs of individuals. Aninitial population of NP individuals is randomly generated, then for each parent(individual) CG
i of the generation G, an offspring CG+1i is created, where the
number of the generations on the algorithm are stated by the MaxGenerationsparameter. The way of generating an offspring is to select randomly three indi-viduals from the current population CG
r1, CG
r2,CG
r3where r1 = r2 = r3 = i and
r1,r2, r3 ∈ [1, ..., NP ]. Select a random number jrand ∈ [1, ..D] where D is thenumber of genes or design variables of the system to optimize. Then, for eachgene j = 1, .., D, if randj < CR or j = i, let

Evolutionary Dynamic Optimization of a CVT 1099
Cj,G+1i = Cj,G
r3+ F (Cj,G
r1− Cj,G
r2) (17)
otherwise, letCj,G+1
i = Cj,Gi (18)
where CR is the probability of reproduction, F is a scaling factor and Cj,Gi is
the j − th gene of the i − th individual of the G − th generation. In order toselect the individual of the next generation between the corresponding parent andoffspring, three selection criteria are applied. These criteria guide the populationtowards a feasible zone, improve the algorithm convergence and bound the designvariables. Moreover, they carry out the constraint handling. A more detailedexplanation about these criteria is given in [11].
The CHDE approach only use the evaluated function, which is obtained bysolving the four differential equations of the dynamic system and the objectivefunction equation. The evaluated constraints and the constraint handling guidethe population towards the feasible region, this represents an advantage whenadditional constraints are added to the original problem because the gradientinformation is not necessary.
Nonlinear Programming Method. A DOP can be solved by converting itinto a Nonlinear Programing (NLP) problem, two transcriptions methods existfor the DOP: the sequential and the simultaneous methods [12]. In the sequentialmethod, only the control variables are discretized; this method is also known asa control vector parameterization. The resulting problem can be solved usingconventional NLP method. A vector pi which contains the current parametervalues is proposed and the NLP problem given in (19) and (20) subject to (9)to (16) is obtained. There Bi is the Broyden-Fletcher-Goldfarb-Shanno (BFGS)updated positive definite approximation of the Hessian matrix, and the gradientcalculation ∇FT
(pi
)is obtained using sensitivity equations. Hence, if di solves
the subproblem (19) and di = 0, then the parameter vector pi is an optimalsolution to the original problem. Otherwise, we set pi+1 = pi + di and with thisnew vector the process is done again.
mind∈R4
QP (pi) = F(pi
)+ ∇FT
(pi
)d +
12dT Bid (19)
subject togj(pi) + ∇gT
j
(pi
)d ≤ 0 j = 1, ..., 9 (20)
The NLP approach needs the gradient calculation and to solve sensitivityequations to obtain the necessary information to establish a subproblem. Thenumber of sensitivity equations is the product between the number of statevariables and the number of parameters, in this case the sensitivity equationsare twenty four. Additionally, six gradient equations and one equation in orderto obtain the value of the objective function must be solved. Besides, fifty fourgradient equations of the constraints must be calculated.
1100 J. Alvarez-Gallegos et al.
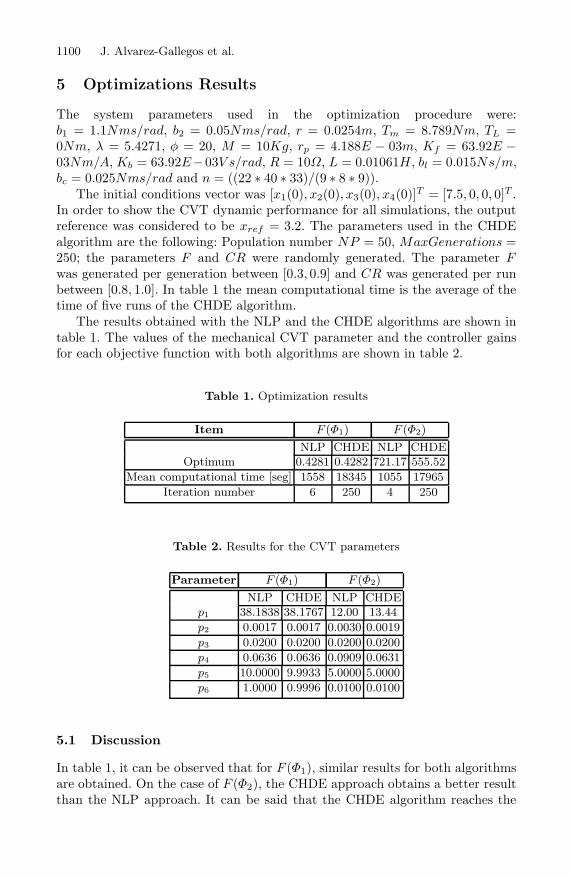
5 Optimizations Results
The system parameters used in the optimization procedure were:b1 = 1.1Nms/rad, b2 = 0.05Nms/rad, r = 0.0254m, Tm = 8.789Nm, TL =0Nm, λ = 5.4271, φ = 20, M = 10Kg, rp = 4.188E − 03m, Kf = 63.92E −03Nm/A, Kb = 63.92E−03V s/rad, R = 10Ω, L = 0.01061H , bl = 0.015Ns/m,bc = 0.025Nms/rad and n = ((22 ∗ 40 ∗ 33)/(9 ∗ 8 ∗ 9)).
The initial conditions vector was [x1(0), x2(0), x3(0), x4(0)]T = [7.5, 0, 0, 0]T .In order to show the CVT dynamic performance for all simulations, the outputreference was considered to be xref = 3.2. The parameters used in the CHDEalgorithm are the following: Population number NP = 50, MaxGenerations =250; the parameters F and CR were randomly generated. The parameter Fwas generated per generation between [0.3, 0.9] and CR was generated per runbetween [0.8, 1.0]. In table 1 the mean computational time is the average of thetime of five runs of the CHDE algorithm.
The results obtained with the NLP and the CHDE algorithms are shown intable 1. The values of the mechanical CVT parameter and the controller gainsfor each objective function with both algorithms are shown in table 2.
Table 1. Optimization results
Item F (Φ1) F (Φ2)NLP CHDE NLP CHDE
Optimum 0.4281 0.4282 721.17 555.52Mean computational time [seg] 1558 18345 1055 17965
Iteration number 6 250 4 250
Table 2. Results for the CVT parameters
Parameter F (Φ1) F (Φ2)NLP CHDE NLP CHDE
p1 38.1838 38.1767 12.00 13.44p2 0.0017 0.0017 0.0030 0.0019p3 0.0200 0.0200 0.0200 0.0200p4 0.0636 0.0636 0.0909 0.0631p5 10.0000 9.9933 5.0000 5.0000p6 1.0000 0.9996 0.0100 0.0100
5.1 Discussion
In table 1, it can be observed that for F (Φ1), similar results for both algorithmsare obtained. On the case of F (Φ2), the CHDE approach obtains a better resultthan the NLP approach. It can be said that the CHDE algorithm reaches the

Evolutionary Dynamic Optimization of a CVT 1101
best optimum of the function. On both objective functions, despite the low com-putational time of the NLP approach, the CHDE algorithm presents a higherperformance, because in all runs carried out the population presents convergencetowards the global optimum.
For the NLP approach, the whole system equation was simultaneously solvedto establish the subproblem until the stop criteria of the subproblem were sat-isfied. The initial point to search the optimum is p1 = [13, 0.0019, 0.02, 0.0629,5, 0.1]T for both functions. However, on the F (Φ2) case, that optimum is onlyreached starting the search from p1.
The results for the CHDE algorithm were achieved with 12500 evaluationsof the objective function for each run, approximately. For the NLP approach,evaluations of the objective function were 4 for each run. Despite the computa-tional cost of the CHDE algorithm, it can be observed that the algorithm ensuresconvergence towards one best solution.
In table 2, it can be observed that for F (Φ1), the optimal solution presentsa more compact CVT size, because the value of the p2 parameter is lower thanthe value of the initial point. On the other hand, the controller gains p5 and p6for both algorithm present a similar value. For the F (Φ2) function, the optimalsolution of the CHDE presents a better result than the optimal solution of theNLP algorithm, because the optimal solution obtained presents a minimal energycontroller besides a more CVT size. This can be observed on the same value ofthe p5, p6 parameters and the smallest value of the p2 parameter.
6 Conclusions
In this paper a concurrent optimal design of a CVT was carried out. A novelapproach based on the Differential Evolution method was used to solve the re-sulting problem. The performance of the CHDE algorithm was compared versusa NLP approach and the results provided a competitive performance. A CHDEadvantage is that the arithmetic operator is applied to the design variables inorder to give an easier implementation. On the other hand, because the CHDEpresents a suitable handle of the constraints, it can be observed that the algo-rithm converges towards the feasible zone in each generation. From the opti-mization results it can be observed that the CHDE algorithm is a very powerfulalgorithm for solving dynamic optimization problems.
Further research includes the statement of the concurrent optimal design as amultiobjective dynamic optimization problem and to apply the CHDE algorithmto obtain the Pareto optimal solutions.
References
1. Norton R.: Machine Design. An integrated approach. Prentice Hall Inc., UpperSaddle River, NJ 07458; 1996.
2. van Brussel H., Sas P., Nemeth I. Fonseca P.D., van den Braembussche P.: Towardsa Mechatronic Compiler. IEEE/ASME Transactions on Mechatronics. 6 (2001)90–104
1102 J. Alvarez-Gallegos et al.
3. Li Q., Zhang W.J., Chen L.: Design for Control–A concurrent Engineering Ap-proach for Mechatronic Systems Design. IEEE/ASME Transactions on Mecha-tronics. 6 (2001) 161–168
4. Deb K., Jain S.: Multi-Speed Gearbox Design Using Multi-Objective EvolutionaryAlgorithms KanGal Report No. 2002001
5. Shiakolas P.S., Koladiya D., Kebrle J.: On the Optimum Synthesis of Six-BarLinkages using Differential Evolution and the Geometric Centroid of PrecisionPositions Technique. In Mechanism and Machine Theory 40 (2005) 319–335
6. Shafai E., Simons M., Neff U., Geering H.: Model of a Continuously variable trans-mission. In First IFAC Workshop on Advances in Automotive Control. (1995)575–593
7. De Silva C., Schultz M., Dolejsi E.: Kinematic analysis and design of a continuouslyvariable transmission. In Mech. Mach. Theory, 29 (1994) 149–167
8. Alvarez Gallegos J., Cruz Villar C.A., Portilla Flores E.A.: Parametric optimaldesign of a pinion-rack based continuously variable transmission In IEEE/ASMEInternational Conference on Advanced Intelligent Mechatronics. (2005) 899–904
9. Spotts M.: Mechanical design Analysis. Prentice Hall Inc., Englewood Cliffs, NJ;1964.
10. Papalambros P., Wilde D.: Principles of optimal design. Modelling and computa-tion. Cambridge University Press., The Edinburg Building, Cambridge CB2 2RU,UK; 2000.
11. Mezura-Montes E., Coello Coello C.A., Tun-Morales I.: Simple Feasibility Rulesand Differential Evolution for Constrained Optimization. In R Monroy, G. Arroyo-Figueroa, L.E. Sucar, and H. Sosa, editors, Proceedings of the Third MexicanInternational Conference on Artificial Intelligence (MICAI’2004), 707–716, Heidel-berg, Germany, April 2004. Mexico City, Mexico, Springer Verlag. Lecture Notesin Artificial Intelligence No. 2972.
12. Betts J.T.: Practical Methods for Optimal Control Using Nonlinear Programming.SIAM, Philadelphia; 2001.





























