Embed Size (px)
Citation preview

2840 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 6, JUNE 2007
Cramér–Rao Bound Analysis on Multiple Scatteringin Multistatic Point-Scatterer Estimation
Gang Shi, Student Member, IEEE, and Arye Nehorai, Fellow, IEEE
Abstract—The resolution improvements of time reversalmethods through exploiting nonhomogeneous media have at-tracted much interest recently with broad applications, includingunderwater acoustics, radar, detection of defects in metals, com-munications, and destruction of kidney stones. In this paper, weanalyze the effect of inhomogeneity generated by multiple scat-tering among point scatterers under a multistatic sensing setup.We derive the Cramér–Rao bounds (CRBs) on parameters of thescatterers and compare the CRBs for multiple scattering usingthe Foldy–Lax model with the reference case without multiplescattering using the Born approximation. We find that multiplescattering could significantly improve the estimation performanceof the system and higher order scattering components actuallycontain much richer information about the scatterers. For the casewhere multiple scattering is not possible, e.g., where only a singletarget scatterer exists in the illuminated scenario, we proposethe use of artificial scatterers, which could effectively improve theestimation performance of the target despite a decrease in thedegrees of freedom of the estimation problem due to the intro-duced unknown parameters of the artificial scatterers. Numericalexamples demonstrate the advantages of the artificial scatterers.
Index Terms—Artificial scatterer, born approximation, Cramér–Rao bound (CRB), Foldy–Lax model, inhomogeneity, multiplescattering, multistatic.
I. INTRODUCTION
THE TIME reversal approach [1] and its super resolution [2]have attracted increasing interest recently with broad ap-
plications, including underwater acoustics, radar, detection ofdefects in metals, communications, and destruction of kidneystones. The idea behind so-called physical time reversal is torecord a signal emitted by sources or reflected by targets usingan array of transducers and then transmit the time-reversed andcomplex conjugated version of the measurements back into themedium. In a reciprocal medium, the back-propagated wave willthen retrace the original trajectory and focus around the originalsource locations. If the medium is homogeneous, the diffractionresolution of the refocused field in the direction parallel to a
Manuscript received December 8, 2005; revised September 19, 2006. Theassociate editor coordinating the review of this manuscript and approving it forpublication was Dr. Jean Pierre Delmas. This work was supported in part by theDARPA/AFOSR under Grant FA9550-04-1-0187 and by AFOSR under GrantFA9550-05-1-0018. This work was presented in part at the IEEE ICASSP’2006.
G. Shi was with the Department of Electrical and Systems Engineering,Washington University in St. Louis, St. Louis, MO 63130 USA. He is nowwith the Division of Biostatistics, Washington University School of Medicine,St. Louis, MO 63130 USA (e-mail: [email protected]).
A. Nehorai is with the Department of Electrical and Systems Engineering,Washington University in St. Louis, St. Louis, MO 63130 USA (e-mail:[email protected]).
Digital Object Identifier 10.1109/TSP.2007.893956
linear array (or cross-range resolution) is , and inthe perpendicular direction (or range resolution) [3], [4], where
is the carrier wavelength, is the range between the array andthe source, and is the array aperture. Experimental and theo-retical evidence [5], [6] shows that refocusing in a nonhomoge-neous or random medium is much tighter than in homogeneous,which is referred to as the super-resolution of the time reversals[2]. This super-resolution is intuitively interpreted as taking ad-vantage of the inhomogeneity to distribute the wave over a largerpart of the medium and, therefore, carry more information aboutthe source [2], and it is quantitatively measured as the improvedeffective aperture [2], which corresponds to the equivalent aper-ture that produces the same refocusing resolution in a referencehomogeneous medium.
Encouraged by results in the situation of inhomogeneity, weinvestigate possible advantages of multiple scattering in thecase of point-scattering estimation, in which the inhomogeneityis induced by interactions among the scatterers. Multiplescattering exists in many physical systems involving wavepropagation, including electrons, ultrasound, electromagnetic,and seismic waves, and can be analyzed using very much thesame approaches, as explained in [7]. Though modeling andunderstanding of multiple scattering has been of interest invarious domains ranging from solid-state physics to optics toseismology [8], it is still widely ignored in the signal processingliterature [9]–[16], to the best of the authors’ knowledge. In[7], [8], and [17]–[21], the effect of multiple scattering on therefocusing of the time reversal is studied experimentally andanalytically, and experiments conducted in [22] demonstratethat multiple scattering can help by increasing the informationtransfer rate in ultrasonic communications. Recently, MUSICand maximum likelihood (ML) algorithms for estimating thelocations of point scatterers with multiple scattering were pro-posed in [23]–[26]. Cramér–Rao bounds (CRBs) are computedin [27] and [28] to evaluate the performance of reflectivityestimation in an unknown environment using physical timereversal ignoring multiple scattering. In this paper, we continueour work in [25] and [26] by evaluating the effect of multiplescattering on the performance of point-scatterer estimation. Wewill evaluate multiple scattering under an active multistaticsensing setup without physical time reversals, and measurethe estimation performance in terms of the well-known CRBbenchmark. We find that multiple scattering could significantlyimprove the estimation performance of the system in most ofrandomized system setups. We will also propose the use ofartificial scatterers to create multiple scattering for the casewhere it is not available. Interestingly, we find that the artificialscatterers could effectively improve the estimation performance
1053-587X/$25.00 © 2007 IEEE

SHI AND NEHORAI: CRAMÉR–RAO BOUND ANALYSIS ON MULTIPLE SCATTERING IN MULTISTATIC POINT-SCATTERER ESTIMATION 2841
of the target despite a decrease in the degrees of freedom dueto the introduced unknown parameters.
This paper is organized as follows. In Section II, we presenttwo physical models used in later comparisons: one takes intoaccount the multiple scattering among the scatterers using theFoldy–Lax model [29]–[32], and the other ignores it by usingthe Born approximation [29], [33]. In Section III, we computethe CRBs based on these two physical models and then presentnumerical comparisons of the CRBs under randomized setups inSection IV. In Section V, we propose the use of artificial scat-terers to improve the system performance and present conclu-sions in Section VI.
II. MODELS AND PROBLEM STATEMENT
We review two physical models of the multistatic responsematrix [3], [34], [35]: one includes multiple scattering using theFoldy–Lax model and the other assumes single reflection usingthe Born approximation. For more details, readers are referredto [23]–[26].
We consider a transmit array of isotropic point an-tennas centered at known positions , and areceive array of sensors at . The so-calledmultistatic response matrix [3], [34], [35] ,represented in frequency domain, is of dimension ,whose element coincides with the received signal atthe th receive antenna due to an impulse excitation (in thefrequency domain) at a frequency applied by the th transmitantenna [35], where and .We assume the scenario under probe is stationary during theperiod of sensing. For ease of understanding, the multistaticmatrix could be interpreted as the counterpart to a channelmatrix in a multiple-input multiple-output (MIMO) wirelesscommunication system. However, since in sensing problems itis of more interest to extract the information about the probedscenario than to transmit information from the transmit arrayto the receive array, we assume that there is no direct link fromany transmit antenna to the receive antennas, i.e., the measuredfields at the receive array are due solely to the scattering ofthe illuminated scenario. Note that since the information aboutthe scenario is fully embedded in the multistatic matrix, theinference on the probed scenario will be based on the measuredmultistatic matrix in this paper, which could be obtained bysending signal at the transmit antennas once a time or em-ploying a set of linearly independent signal simultaneously atdifferent transmit antennas.
We consider a scenario as illustrated in Fig. 1 that con-sists of discrete point scatterers in a known background
Fig. 1. System setup illustration.
medium. The locations and scattering potentials of the scat-terers are assumed unknown, denoted by and
, respectively. The time harmonicGreen’s function of the background, which repre-sents the “propagator” from a location to at frequency ,satisfies the reduced wave equation [3]
(1)
where is a reference propagation speed and is the re-fraction index of the medium at position . Though this Green’sfunction is scalar, which is directly applicable to acoustic or ul-trasound problems, it could be generalized to the dyadic version[36] when dealing with electromagnetic applications. In the restof this paper, we will drop the dependence on the frequencyin all the notations for the sake of simplicity.
Adopting the Foldy–Lax multiple scattering equations[30]–[32], we formulate the multistatic matrix in [25] and [26]in a closed matrix form as
(2)
where “ ” stands for a matrix transpose, is redefined asrepresenting the unknown scatterer
location parameters, unknownscattering parameters, . The matrix isdefined as (3), shown at the bottom of the page, and
(4)
(5)
.... . .
... (3)

2842 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 6, JUNE 2007
the receive Green’s function vector as a functionof arbitrary location is
(6)
and the transmit Green’s function vector is
(7)
Since the receive and transmit Green’s function vectors incor-porate all of the spatial characteristics of the response of thereceive and transmit arrays to a point source located at , theycan readily be interpreted as generalizations of the conventionalarray response vector or steering vector [11]. Note that theclosed-form matrix representation (2) is a function of the back-ground Green’s function only.
Theoretically, the matrix may be singular,depending on the setup of the scatterers. For example, this sin-gularity occurs when the matrix pair has a unitgeneralized eigenvalue, or equivalently 1 is an eigenvalue of
. In this paper, we consider only the case in which, the spectral radius of , is strictly less
than one, calling it the weak interaction scattering case. Thiscondition is satisfied when either the moduli of the scatteringpotentials are small, the scatterers aresufficiently separated, or both. The spectral radius [37] of a ma-trix is defined as
(8)
where is the spectrum of , i.e., the set of eigenvaluesof .
Using the identity , themultistatic matrix can be expanded into the powerseries as
(9)
This series form is actually a generalization of the Neumann se-ries or Born series [29], [33], [38] under the multistatic context,and its convergence is guaranteed under our weak scattering as-sumption . The leading term of (9), knownas the Born approximation, represents the first-order scattering,i.e., the scattering without taking into account the multiple scat-tering. The second term represents the second-order scatteringcontribution, namely the portion of the scattering that is re-flected by the scatterers exactly twice. The rest of the series areother higher order scattering terms.
We will employ the Born-approximated model
(10)
(11)
as the reference model in later sections for studying the effectof multiple scattering on the estimation performance. Observing
(11), we can see that the multistatic matrix could be decomposedinto parts that are associated one-to-one with the scattering ofthe scatterers. In this case, the scattering is basically modeledas if each scatterer scatters as if it were alone, i.e., there are nointeractions among them at all. It is easy to verify that the model(10) is a special case of (2) when the matrix is set to be thezero matrix.
Based on the two physical models (2) and (10) of the multi-static matrix, we investigate the multiple scattering effects onthe estimation performance on the location parameters andscattering parameters of the point scatterers by conductingCRB analysis. Before computing the CRBs, we further assumethat , the measurement of the multistatic matrix, deviatesfrom the model by additive independent, identicallydistributed (i.i.d.) complex circularly symmetric Gaussiannoise, i.e.,
(12)
where is the measurement matrix, is thenoise matrix whose elements ,
stacks the first to the last columns of the matrix one underanother to form a long vector, and is the identity matrix ofdimension . It is worth mentioning that though itis technically feasible to derive the CRBs under a more generalcorrelated noise model, the simple noise model is assumed forgaining insight into the differences between the two scatteringeffects, i.e., with and without multiple scattering.
III. CRB ANALYSIS
It is well-known that the CRB [39] limits the performance ofany unbiased estimator, and, therefore, provides a fundamentallimit on the possible estimation accuracy under the given systemsetup. It is a local performance bound, tight in large samples andhigh signal-to-noise (SNR) cases [12]. To quantitatively eval-uate the multiple scattering effect, we derive and compare theCRBs on unknown scatterer parameters and based on thephysical models that use the Foldy–Lax model and Born ap-proximation, respectively. Note that model (2) is exact, and (10)is just a first-order approximation of the former. Whereas, in ourcomparisons, we employ the second model as if it were “exact,”we are modeling a fictitious reference scenario where there isideally no multiple scattering among the scatterers.
Under the noise model defined in Section II, the probabilitydistribution of is
(13)
where represents the Frobenius norm of a matrix, and thelog-likelihood function is
(14)
where denotes the natural logarithm. We start derivingthe CRBs from the expression for the Fisher information ma-trix (FIM) in [12]. Reparameterizing the unknown scatteringparameters into real parameters
, where and denote the

SHI AND NEHORAI: CRAMÉR–RAO BOUND ANALYSIS ON MULTIPLE SCATTERING IN MULTISTATIC POINT-SCATTERER ESTIMATION 2843
real and imaginary parts of a complex number, respectively. De-fine , and the FIM for is found as
(15)
where represents expectation and “ ” the conjugatetranspose. Here, the derivative is defined as
(16)
where is a scalar function of , andis defined as
...... (17)
where . Note that the noise parameteris disjoint (block diagonal) with the location and scattering pa-rameters and in full FIM of and . We here work onthe FIM of the and only. The Jacobian matrix
(18)
could be further partitioned as
(19)
where
(20)
(21)
Following the previous partition, the FIM is partitioned accord-ingly as
(22)
The CRB matrix for and is found as the inverse of the FIM,i.e.,
(23)
The CRB matrix for location parameters corresponds to thelower right block of the CRB matrix
(24)
by the partitioned inverse identity [40]. Similarly, the CRB ma-trix for scattering parameter is
(25)
We define
(26)
which is the Schur complement [40] of in , as the FIMof in the presence of nuisance parameter , in respect that
. Note that represents the Fisherinformation of with a prior known , it is not surprising to seethat or equivalently , where
for matrices and means that is nonnega-tive definite. The difference of the two FIMs
represents the information loss due to the lack ofknowledge on . Similarly, the Fisher information matrix ofin the presence of nuisance parameter is defined as
(27)
and we have and .The CRB (24) could be achieved asymptotically by the max-
imum likelihood (ML) estimator [12] that jointly estimatesand or by the estimator that maximizes the likelihood functionconcentrated with respect to the nuisance parameter. In fact, theCRB (24) will coincide with the concentrated CRB derived fromsuch a concentrated likelihood function. The proof is based ona similar approach to that employed in [41] and will not be pre-sented here.
A. CRBs for the Case With Multiple Scattering
Using the identity [42], thevectorized multistatic matrix model (2) using the Foldy–Laxmultiple scattering model is
The Jacobian matrices and are found as
(28)
(29)
where• “ ” represents the Kronecker product [42];• “ ” stands for the Khatri–Rao product1 [42];• “ ” is the imaginary unit;• ;• ;• ;• ;
1The Khatri–Rao product of two matrices with the same number of columns isdefined asA�B = [aaa bbb ; aaa bbb � � �aaa bbb ], whereA = [aaa ; aaa � � �aaa ]and B = [bbb ; bbb � � � bbb ].

2844 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 6, JUNE 2007
• : -dimension column vector with each element as 1;• is the dimension of one location parameter , for ex-
ample, when solving the problem in a general 3-Dspace;
• ;• ;• , in
which .Proof: See Appendix A.
To compute the and , we firstcompute and as previously shown and substitutethem into (15) for the FIM and then (24) and (25) for the CRBsof and .
B. CRBs for the Reference Case With No Multiple Scattering
For the reference case, namely without multiple scattering,we use the multistatic model (10) based on the Born approxima-tion, which models a fictitious reference scenario where there isideally no multiple scattering. Then the vectorized version ofthe multistatic matrix model (10) is
(30)
where we used the identity[42], where is diagonal and forms a vector from thediagonal elements of the matrix. Recalling that multistatic model(10) is the special case of (2) when is the zero matrix, we canfind the Jacobian matrices and simply by substituting
as a zero matrix into (28) and (29), which are
(31)
(32)
Then, and could be subsequentlycomputed from and .
IV. NUMERICAL ANALYSIS OF THE MULTIPLE SCATTERING
In this section, we present numerical comparisons of theCRBs computed by the Foldy–Lax multiple scattering modeland the Born approximation, respectively. We assume thatthe background is homogeneous; then for each scatterer, theother scatterers behave as part of the background and induceinhomogeneity by multiple scattering. For the reference casewithout multiple scattering, the setup for each scatterer is justhomogeneous. Thus, the inhomogeneity is due solely to themultiple scattering, and its effect is evaluated by comparingthe CRBs of scatterer parameters for the two cases. It is worthemphasizing that we assume both the Foldy–Lax and Born ap-proximation physical models are exact in the computation andcomparison of the CRBs, i.e., there is no modeling error issueinvolved. In other words, the two physical models representtwo distinct physical processes, and we wish to evaluate themultiple scattering, the difference between them, in terms of itseffect on the estimation performance bounds.
We consider the 2-D setup: the antenna elements and scat-terers are infinite lines and perpendicular to the – plane; then
the locations of targets and antennas could be represented math-ematically as points in the – plane. The background Green’sfunction for the 2-D case [36], [43] is
(33)
where is the zero-order Hankel function of the first kind,which could be approximated under a far field assumption [43]as
(34)
For computing CRBs analytically, we use the approximate formand drop the unessential constant. The background Green’sfunction used in the following numerical examples is:
(35)
When computing the Jacobian matrices (20) and (21) and (31)and (32), the derivatives of Green’s functions with respect to thelocation parameters are found as
(36)
where and
(37)
Similarly
(38)
where , and
(39)
See Appendix B for detailed computations.We employ collocated transmit and receive arrays that are
uniform linear arrays (ULAs) located between andwith spacing of 5. Then ;
; ; andfor and .
We assume three scatterers are at , and ,respectively, with unit scattering coefficients. All the coordi-nates are in the unit of wavelength, i.e., we assume the narrow-band signal with . It is well-known that the spatial under-sampling will induce grating lobes. We proposed a multiple-fre-quency scheme for resolving the spatial ambiguity in [25] and[26] for sparse arrays. Though we use the antenna spacingfor computational simplicity, it is easy to verify that the resultson the multiple scattering also hold for transmit and receive ar-rays with spacing.
In the first example, we demonstrate the CRBs and mean-squared errors (MSEs) of maximum likelihood estimates as afunction of the noise level. In Fig. 2, the MSE represents the

SHI AND NEHORAI: CRAMÉR–RAO BOUND ANALYSIS ON MULTIPLE SCATTERING IN MULTISTATIC POINT-SCATTERER ESTIMATION 2845
Fig. 2. Sum of MSEs for estimating location parameter xxx, and trCRB(xxx; ~���)as a function of noise level.
Fig. 3. Sum of MSEs for estimating scattering potential parameter ~��� , andtrCRB(~��� ;xxx) as a function of noise level.
sum of the MSEs for the location parameters and the CRBstands for trace of the CRB matrix on . Fig. 3 demonstratesthe sum of the MSEs for the scattering parameter and trace ofits CRB matrix. Recall that the Born approximation models thefictitious reference case where there is ideally no multiple scat-tering; thus, this case may have different received signal powerfrom the case with multiple scattering. In this example, the re-ceived signal power with multiple scattering is slightly higherthan that without it, which could be intuitively explained byconsidering that more energy of the incident signals is reflectedto the receive array by higher order scatterings [see the phys-ical model (9)]. This improvement, however, is not guaranteed,depending on the scatterer setup, since the scatterings of dif-ferent orders are added up coherently. Comparing the MSEswith CRBs for the cases with and without multiple scattering,we see that the estimation performance with the multiple scat-tering is significantly better than without it. Again, this perfor-mance improvement might depend on the system setup.
Fig. 4. Scatterer distribution in an example of 251 Monte Carlo runs.
Fig. 5. trCRB (~��� ;xxx)=trCRB (~��� ;xxx) versus trCRB (xxx; ~���)=trCRB (xxx; ~���) in the 251 Monte Carlo runs.
In the second example, we wish to find how the multiplescattering affects the estimation performance under varioussystem setups. We randomize the scatterer setup assumingthat scatterers are located uniformly over a rectangular areacentered at with dimension 50 40, and their loca-tions distribute independently. To prevent the scattering frombeing too weak, the moduli of the scattering potentials areassumed to be independently and uniformly distributed over
, and the phases uniformly distributed over .See Fig. 4 for an illustration of the locations of the threescatterers in an example of 251 Monte Carlo runs. To showthe effects of multiple scattering at different scatterer setups,we represent each Monte Carlo run in Fig. 5 as one pointwith as its coordinate and
as the coordinate, where“ ” represents the trace of a matrix. Then, the runs in whichthe CRBs on are improved due to the multiple scattering willhave the ratio larger than one,
2846 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 6, JUNE 2007
and those in which the CRBs on are deteriorated will haveratio less than one. Analogously, the same interpretation applieson the . If we set point asthe coordinate origin, we can see in Fig. 5 that all of the 251Monte Carlo runs are located in the first quadrant, which meansthat multiple scattering improves the CRBs in the randomizedsetups. The median for is7.1254, and 8.6120 for . Obvi-ously the improvement is quite significant. In addition, a strongpositive correlation between the two CRB ratios of and canbe seen in Fig. 5, which indicates that the estimation accuracyon the location parameters greatly affects that on the scatteringparameters.
Though we have not been able to identify analytical condi-tions under which multiple scattering is beneficial in terms ofimproving the CRBs, we find in extensive simulations that themultiple scattering is favorable under most of the weak interac-tion scattering setups.
V. ARTIFICIAL SCATTERERS
Having shown that multiple scattering can improve estima-tion performance under certain conditions, in this section wepropose the use of artificial scatterers to apply this result.
One way of exploiting the advantage of the multiple scat-tering is simply to introduce it into the modeling, namelyadopting an appropriate physical model to take into accountthe multiple scattering, which is whereas widely ignored incurrent literature. Furthermore, we propose the use of artificialscatterers to create multiple scattering in the case, for example,with only one target point scatterer in the illuminated scenario,where multiple scattering no longer exists. The multistaticmatrix model for this case is reduced to
(40)
where represents the location of the target scatterer andis its complex scattering potential. Note that (40) is a specialcase of both (2) and (10). In [44], we proposed using the artifi-cial scatterers in multiple-input multiple-output (MIMO) wire-less communication systems under a macrocell environment toincrease its capacity, multiplexing, and diversity gains and toimprove the error probability performance. In this paper, wefurther propose the use of artificial scatterers in the sensing ap-plication to create multiple scattering artificially in the hope ofimproving the estimation performance of system. The artificialscatterers can either be active or passive: active artificial scat-terers could be relays that simply amplify and retransmit the in-cident wave; passive artificial scatterers could be scatterers thatreflect efficiently. The artificial scatterers could be deployed inthe scenario of interest in a planned manner or happen to benearby by opportunity.
Supposing that the locations and scattering potentials of theartificial scatterers are known a priori, it is reasonable to projectthe improvement on the estimation of the target scatterer sincethe number of unknown parameters is unchanged and the cre-ated multiple scattering is very likely helpful. Since the assump-tion of such a priori information may be unrealistic, e.g., for the
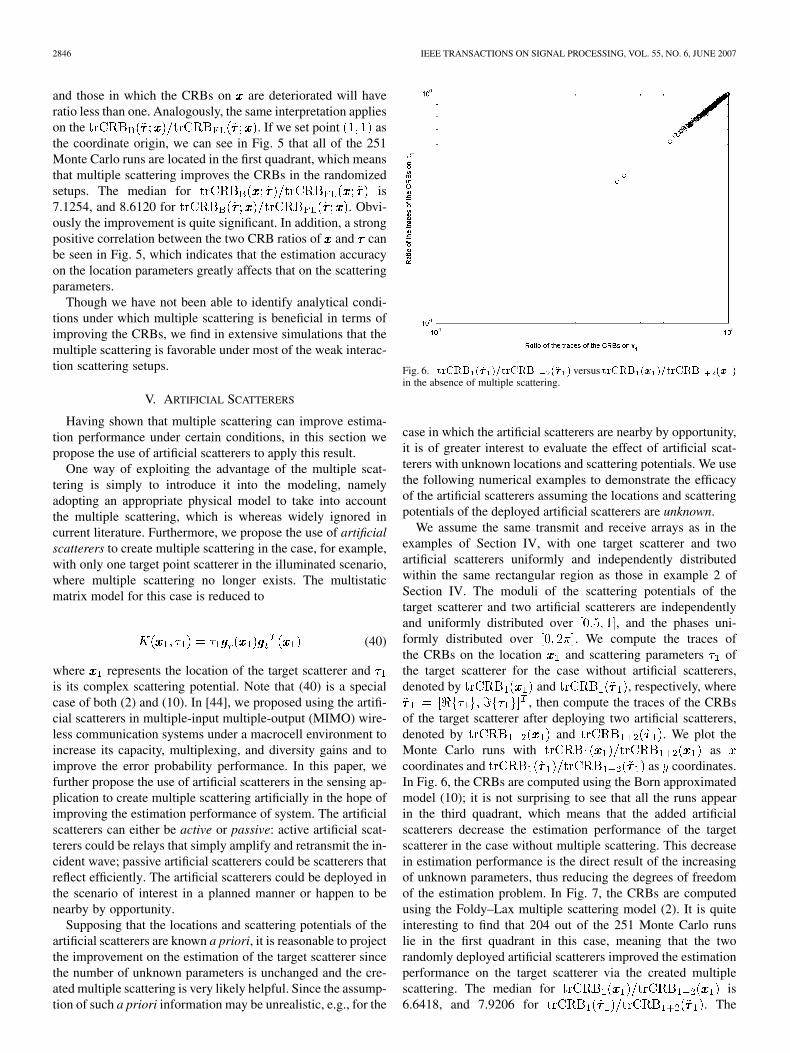
Fig. 6. trCRB (~��� )=trCRB (~��� ) versus trCRB (xxx )=trCRB (xxx )in the absence of multiple scattering.
case in which the artificial scatterers are nearby by opportunity,it is of greater interest to evaluate the effect of artificial scat-terers with unknown locations and scattering potentials. We usethe following numerical examples to demonstrate the efficacyof the artificial scatterers assuming the locations and scatteringpotentials of the deployed artificial scatterers are unknown.
We assume the same transmit and receive arrays as in theexamples of Section IV, with one target scatterer and twoartificial scatterers uniformly and independently distributedwithin the same rectangular region as those in example 2 ofSection IV. The moduli of the scattering potentials of thetarget scatterer and two artificial scatterers are independentlyand uniformly distributed over , and the phases uni-formly distributed over . We compute the traces ofthe CRBs on the location and scattering parameters ofthe target scatterer for the case without artificial scatterers,denoted by and , respectively, where
, then compute the traces of the CRBsof the target scatterer after deploying two artificial scatterers,denoted by and . We plot theMonte Carlo runs with ascoordinates and as coordinates.In Fig. 6, the CRBs are computed using the Born approximatedmodel (10); it is not surprising to see that all the runs appearin the third quadrant, which means that the added artificialscatterers decrease the estimation performance of the targetscatterer in the case without multiple scattering. This decreasein estimation performance is the direct result of the increasingof unknown parameters, thus reducing the degrees of freedomof the estimation problem. In Fig. 7, the CRBs are computedusing the Foldy–Lax multiple scattering model (2). It is quiteinteresting to find that 204 out of the 251 Monte Carlo runslie in the first quadrant in this case, meaning that the tworandomly deployed artificial scatterers improved the estimationperformance on the target scatterer via the created multiplescattering. The median for is6.6418, and 7.9206 for . The

SHI AND NEHORAI: CRAMÉR–RAO BOUND ANALYSIS ON MULTIPLE SCATTERING IN MULTISTATIC POINT-SCATTERER ESTIMATION 2847
Fig. 7. trCRB (~��� )=trCRB (~��� ) versus trCRB (xxx )=trCRB (xxx )in the presence of multiple scattering.
multiple scattering surprisingly not only offsets the degradationof the CRBs on the target scatterers due the lowered degrees offreedoms, but also improves the estimation performance furtherin most of the randomized scatterer setups.
VI. CONCLUSION
We derived the CRBs on the location and scattering param-eters of point scatterers under a multistatic sensing setup forthe cases in which multiple scattering either exist or not. Wedemonstrated that the inhomogeneity induced by the multiplescattering could greatly improve the estimation performance interms of the CRBs. Higher order scattering components actu-ally contain much richer information about the scatterers com-pared with the first order scattering component. We then pro-posed to use artificial scatterers in the absence of multiple scat-tering. Interestingly, the multiple scattering created by these ar-tificial scatterers could improve the estimation performance de-spite the decreased degrees of freedom by the unknown param-eters of the artificial scatterers.
Analytically comparing the CRB expression in terms of theirtrace, determinant, or any matrix norm is challenging due tothe nonlinear dependence of the CRB matrices on the systemparameters. We will investigate this problem in our futurework. Also, since the effect of multiple scattering depends onsystem setup, identifying the conditions under which multiplescattering is favorable is of great interest, which will also beconsidered in our future work.
APPENDIX A
We present detailed steps for computing the Jacobian ma-trices and based on the multistatic matrix (2) thatuses the Foldy–Lax multiple scattering model. The followingcomputations use the derivative of a matrix with respective toanother matrix. Among the many different definitions available,we use the one suggested in [45], i.e.,
(A1)
It is easy to verify that the chain rule holds under such adefinition
(A2)
For the derivative involving complex independent variables, weuse the generalized definition of a complex derivative defined in[46]–[48]
(A3)
where is the complex independent variable and is a scalarfunction of . It is well-known that if the complex functionis analytic or complex differentiable in a region , it satisfies theCauchy–Riemann equations
(A4)
(A5)
for every point in this region. For analytic functions, the regularchain rule applies [48]
(A6)
In the following derivations, we basically use two classes ofcomplex functions: the linear function , whichis holomorphic, and , which is mero-morphic. Thus, the chain rule holds for complex derivatives in-volving these two functions except at discrete singular points.Derivation of

2848 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 6, JUNE 2007
In the second equality, we used ,where . In the fifth equality, we used the iden-tity [45]. In thesixth equality, we used [42].In the seventh equality, we used [49],where is a diagonal matrix of dimension is a
selection matrix [49] defined as
(A7)
and is a column vector with 1 in the th position andzeros elsewhere, i.e.,
(A8)
In the eighth equality we used the identity[49], [42]. In the ninth equality, we
used , and the tenthequality is easily verified.
Derivation of
where in the third equality, we used the identity [40]
In the fourth equality, we used the identity, which is easily verified. The commutation
matrix [40], [50] in the fourth equality is the zero-onematrix such that for any .In the fifth equality, we used the identity
[42], and .The sixth equality follows by Theorem 1, and in the seventhequality, we used . In the eighth equality
(A9)
in which .Theorem 1: , where “ ”
denotes the Kronecker product, “ ” denotes the Khatri–Raoproduct, and
is the commutation matrix.Proof:
(A10)
where in the first equality, we used the [42],the second [42], and the third
follows from (T3.12) in [42].The last equality is by Lemma 1.
Lemma 1: , where “ ” denotes theKhatri–Rao product, is the com-mutation matrix.

SHI AND NEHORAI: CRAMÉR–RAO BOUND ANALYSIS ON MULTIPLE SCATTERING IN MULTISTATIC POINT-SCATTERER ESTIMATION 2849
Proof: Let and .Then , and
where the second equality comes from, here and are vectors
of dimension and , respectively.
APPENDIX B
We use the 2-D Green’s function in homogeneous medium as
(B1)
for and , whereand the equa-
tion shown at the top of the page hold. where in the secondequality we use . We canalso find the following derivatives:
Then
(B2)
Analogously
and
(B3)
REFERENCES
[1] M. Fink, “Time-reversed acoustics,” Scientif. Amer., vol. 281, pp.91–97, Nov. 1999.
[2] L. Borcea, G. Papanicolaou, and C. Tsogka, “Theory and applicationsof time reversal and interferometric imaging,” Inverse Problems, vol.19, pp. 5139–5164, 2003.
[3] L. Borcea, C. Tsogka, G. Papanicolaou, and J. Berryman, “Imagingand time reversal in random media,” Inverse Problems, vol. 18, pp.1247–1279, 2002.
[4] M. Born and E. Wolf, Principles of Optics. New York: AcademicPress, 1970.
[5] M. Fink, D. Cassereau, A. Derode, C. Prada, P. Roux, M. Tanter, J. L.Thomas, and F. Wu, “Time-reversed acoustics,” Rep. Progr. Phys., vol.63, pp. 1933–1995, 2000.
[6] M. Fink and C. Prada, “Acoustic time-reversal mirrors, topical review,”Inverse Problems, vol. 17, pp. R1–R38, 2001.
[7] A. Derode, A. Tourin, and M. Fink, “Random multiple scattering of ul-trasound. I. Coherent and ballistic waves,” Phys. Rev. E, vol. 64, 2001,036605.
[8] A. Derode, A. Tourin, and M. Fink, “Random multiple scattering ofultrasound. II. Is time reversal a self-averaging process?,” Phys. Rev.E, vol. 64, 2001, 036606.
[9] H. Krim and M. Viberg, “Two decades of array signal processing re-search, the parametric approach,” IEEE Signal Process. Mag., vol. 13,no. 4, pp. 67–94, Jul. 1996.
[10] B. D. Van Veen and K. M. Buckley, “Beamforming: A versatile ap-proach to spatial filtering,” IEEE ASSP Mag., vol. 5, no. 2, pp. 4–24,Apr. 1988.
[11] H. L. Van Trees, Detection, Estimation, and Linear Modulation Theory.—Pt. 3. Radar-sonar Signal Processing and Gaussian Signals in Noise.—Pt. 4. Optimum Array Processing. New York: Wiley, 2001.
[12] S. M. Kay, Fundamentals of Statistical Signal Processing: EstimationTheory. Englewood Cliffs, NJ: Prentice-Hall, 1993.
[13] P. Stoica and R. L. Moses, Introduction to Spectral Analysis. UpperSaddle River, NJ: Prentice-Hall, 1997.
[14] S. S. Haykin, Detection and Estimation: Applications to Radar.Stroudsburg, PA: Dowden, Hutchinson & Ross, 1976.
[15] H. V. Poor, An Introduction to Signal Detection and Estimation, 2nded. New York: Springer-Verlag, 1994.
[16] L. L. Scharf, Statistical Signal Processing: Detection, Estimation andtime Series Analysis. Reading, MA: Addison-Wesley, 1991.
[17] A. Derode, P. Roux, and M. Fink, “Robust acoustic time reversal withhigh-order multiple scattering,” Phys. Rev. Lett., vol. 75, no. 23, pp.4206–4210, 1995.
[18] A. Derode, P. Roux, and M. Fink, “Acoustic time-reversal throughhigh-order multiple scattering,” in Proc. IEEE Ultrasonic Symp., 1995,pp. 1091–1094.
[19] A. Derode, A. Tourin, and M. Fink, “Time reversal versus phase conju-gation in a multiple scattering environment,” Ultrasonics Int., vol. 40,no. 1, pp. 275–280, May 2002.
[20] A. Derode, A. Tourin, and M. Fink, “Multiple scattering and time-re-versal acoustics,” presented at the 17th Int. Congr. Acoust., Rome, Italy,2001.
[21] A. Derode, A. Tourin, and M. Fink, “Optimisation of time-reversal fo-cusing in a multiple scattering environment,” presented at the 141stASA Meeting, J. Acoust. Soc. Amer., Chicago, IL, 2001.
[22] A. Derode, A. Tourin, J. Rosny, M. Tanter, S. Yon, and M. Fink, “Takingadvantage of multiple scattering to communication with time-reversalantennas,” Phys. Rev. Lett., vol. 90, no. 1, 2003, 014301.

2850 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 55, NO. 6, JUNE 2007
[23] F. K. Gruber, E. A. Marengo, and A. J. Devaney, “Time-reversalimaging with multiple signal classification considering multiplescattering between the targets,” J. Acoust. Soc. Amer., vol. 115, pp.3042–3047, Jun. 2004.
[24] A. J. Devaney, E. A. Marengo, and F. K. Gruber, “Time-reversal basedimaging and inverse scattering of multiple scattering point targets,” J.Acoust. Soc. Amer., vol. 118, no. 5, pp. 3129–3138, Nov. 2005.
[25] G. Shi and A. Nehorai, “Maximum likelihood estimation of point scat-terers for computational time-reversal imaging,” presented at the 13thAnnu. Workshop Adapt. Sensor Array Process., Lexington, MA, 2005.
[26] G. Shi and A. Nehorai, “Maximum likelihood estimation of point scat-terers for computational time-reversal imaging,” Commun. Inf. Syst.,vol. 5, no. 2, pp. 227–256, 2005.
[27] R. Rangarajan and A. O. Hero III, “Analysis of a multistatic adap-tive target illumination and detection approach (MATILDA) to time re-versal imaging,” presented at the IMA “Hot Topics” Workshop: Adapt.Sensing Multimode Data Inversion, Minneapolis, MN, 2004.
[28] R. Rangarajan, N. Patwari, and A. O. Hero III, “Analysis of a multi-static adaptive target illumination and detection approach (MATILDA)to time reversal imaging,” , to be published.
[29] J. H. Taylor, Scattering Theory. New York: Wiley, 1972.[30] L. L. Foldy, “The multiple scattering of waves,” Phys. Rev., vol. 67, pp.
107–119, 1945.[31] M. Lax, “Multiple scattering of waves,” Rev. Mod. Phys., vol. 23, pp.
287–310, 1951.[32] M. Lax, “Multiple scattering of waves. II. The effective field in dense
systems,” Phys. Rev., vol. 85, pp. 621–629, 1952.[33] R. G. Newton, Scattering Theory of Waves and Particles. New York:
McGraw-Hill, 1966.[34] A. J. Devaney, “Super-resolution processing of multi-static data using
time reversal and MUSIC,” J. Acoust. Soc. Amer. [Online]. Available:http://www.ece.neu.edu/faculty/devaney, to be published
[35] A. J. Devaney, “Time reversal imaging of obscured targets frommultistatic data,” IEEE Trans. Antennas Propag., vol. 53, no. 5, pp.1600–1610, May 2005.
[36] C. Tai, Dyadic Green Functions in Electromagnetic Theory. Piscat-away, NJ: IEEE Press, 1994.
[37] G. W. Stewart and J. Sun, Matrix Perturbation Theory. Boston, MA:Academic Press, 1990.
[38] P. M. Morse and H. Feshbach, Methods of Theoretical Physics. NewYork: McGraw-Hill, 1953.
[39] P. Stoica and A. Nehorai, “MUSIC, maximum likelihood andCramér–Rao bound,” IEEE Trans. Acoust., Speech, Signal Process.,vol. ASSP-37, no. 5, pp. 720–741, May 1989.
[40] H. Lütkepohl, Handbook of Matrices. New York: Wiley, 1996.[41] B. Hochwald and A. Nehorai, “Concentrated Cramér–Rao bound ex-
pressions,” IEEE Trans. Inf. Theory, vol. 40, no. 2, pp. 363–371, Mar.1994.
[42] J. W. Brewer, “Kronecker products and matrix calculus in systemtheory,” IEEE Trans. Circuits Syst., vol. CAS-25, no. 9, pp. 772–781,Sep. 1978.
[43] P. Sheng, Introduction to Wave Scattering, Localization, and Meso-scopic Phenomena. San Diego, CA: Academic Press, 1995.
[44] G. Shi and A. Nehorai, “Macrocell multiple-input multiple-outputsystem analysis,” IEEE Trans. Wireless Commun., vol. 5, no. 5, pp.1076–1085, May 2006.
[45] J. R. Magnus and H. Neudecker, Matrix Differential Calculus with Ap-plications in Statistics and Econometrics. New York: Wiley, 1999.
[46] D. H. Brandwood, “A complex gradient operator and its applicationin adaptive array theory,” Inst. Elect. Eng. Proc., vol. 130, no. 1, pp.11–16, Feb. 1983.
[47] L. Schwartz, Cours d’Analyse. Paris, France: Hermann, 1967, vol. II.[48] K. B. Petersen and M. S. Pedersen, “The Matrix Cookbook,” 2006 [On-
line]. Available: http://2302.dk/uni/matrixcookbook.html[49] H. Lev-Ari, “Efficient solution of linear matrix equations with applica-
tion to multistatic antenna array processing,” Commun. Inf. Syst., vol.5, no. 1, pp. 123–130, 2005.
[50] D. A. Turkington, Matrix Calculus and Zero-one Matrices. Cam-bridge, U.K.: Cambridge Univ. Press, 2002.
Gang Shi (S’02) received the B.E. degree in auto-matic control engineering and the M.E. degree inpattern recognition and intelligence system from theXi’an Jiaotong University, Xi’an, China, in 1996and 1999, respectively, and the D.Sc. degree inelectrical engineering from Washington Universityin St. Louis, MO, in 2006.
He is currently a Postdoctoral Researcher at Bio-statistics Division, Washington University Schoolof Medicine. From 1999 to 2000, he worked as aTeaching Associate at the Xi’an Jiaotong University.
Arye Nehorai (S’80–M’83–SM’90–F’94) receivedthe B.Sc. and M.Sc. degrees in electrical engineeringfrom The Technion, Haifa, Israel, and the Ph.D. de-gree in electrical engineering from Stanford Univer-sity, Stanford, CA.
From 1985 to 1995, he was a faculty memberwith the Department of Electrical Engineering, YaleUniversity, New Haven, CT. In 1995, he joined theDepartment of Electrical Engineering and ComputerScience, The University of Illinois at Chicago (UIC),as a Full Professor. From 2000 to 2001, he was Chair
of the department’s Electrical and Computer Engineering (ECE) Division,which then became a new department. In 2001, he was named UniversityScholar of the University of Illinois. In 2006, he became Chairman of theDepartment of Electrical and Systems Engineering, Washington Universityin St. Louis (WUSTL). He is the inaugural holder of the Eugene and MarthaLohman Professorship and the Director of the Center for Sensor Signal andInformation Processing (CSSIP) at WUSTL since 2006.
Dr. Nehorai was co-recipient of the IEEE SPS 1989 Senior Award for BestPaper with P. Stoica, co-author of the 2003 Young Author Best Paper Award,and co-recipient of the 2004 Magazine Paper Award with A. Dogandzic. He waselected Distinguished Lecturer of the IEEE SPS for the term 2004 to 2005. He isthe Principal Investigator of the New Multidisciplinary University Research Ini-tiative (MURI) Project entitled Adaptive Waveform Diversity for Full SpectralDominance. He has been a Fellow of the Royal Statistical Society since 1996.He was Editor-in-Chief of the IEEE TRANSACTIONS ON SIGNAL PROCESSING
during the years 2000 to 2002. In the years 2003 to 2005, he was Vice Presi-dent (Publications) of the IEEE Signal Processing Society, Chair of the Publica-tions Board, member of the Board of Governors, and member of the ExecutiveCommittee of this Society. From 2003 to 2006, he was the founding editor ofthe special columns on Leadership Reflections in the IEEE Signal ProcessingMagazine.



























