Embed Size (px)
Citation preview

Biologically-Inspired Push Recovery Capable Bipedal Locomotion
Modeling Through Hybrid Automata
Vijay Bhaskar Semwal, Shiv A. Katiyar, Rupak Chakraborty and G.C. Nandi
Department of Robotics & Artificial Intelligence Indian Institute of Information Technology Allahabad, U.P., India
Abstract— The earlier developed two stage hybrid automata is not a perfect representation of human walk as it is a combination of
discrete and continuous phases and the whole human GAIT has 8 stages. Our major contribution is eight stage hybrid automata for
large push recovery and various dynamic parameter studies for stable walk model. We have developed a controller to verify different
stage of human locomotion by using OpenSim data for model 3DGaitModel2354 and lower extremity data. We verified the hybrid
automata model using the real human GAIT data for normal person. We identify the importance of the human lower extremity for
locomotion and push recovery from large perturbation. The novelty of research work is to model the bipedal locomotion as a re-usable
component based framework. Our original contribution lies in the fact that we have tried to view it from a software engineering perspective.
Keywords—Humanoid Locomotion; Hybrid System; Hybrid automata, Dynamic System, Push Recovery, Component based modelling.
Tools:Webots, Matlab, Imitator,OpenSim.
I. INTRODUCTION
Human like machine development in various areas is the need of the hour, for instance, in an event of disaster
anthropomorphic bipedal robots can come in handy. Studying human anatomy for walking can also be utilized to design
prosthetics for the injured or handicapped [1]. The bottom line is giving the reality to the dream that robots perform tasks
conducive for humans like climbing stairs, avoiding obstacles, traversing inaccessible rough terrains and space exploration are to
name a few. Currently available humanoids, Honda’s Advanced Step in Innovative Mobility (ASIMO), Humanoid Robotics Project (HRP)-2 and NAO walk with bent knees so that dynamic CoM is always above the feet so that it doesn’t roll at the cost
of the flat foot move. The most evident solution to bent-knee problem seems to be purely passive walking gait without actuation.
But ballistic knee dynamic walkers, similar to that of Ted McGeer’s [2], need actuation when plying on flat surfaces, uphill or
rough terrains and more importantly considering 3D i.e. yaw effects is necessary.
To be compatible with human environment, bipeds are preferred albeit inherently unstable. Human walk is outcome of
several thousands of years of evolution and thus worth this attention while most of the presently available robots walk with bent
knee/flat foot [3]. We are habitual of walking on flat ground so we are not bothered to pay attention to it. Human-robot interaction
will also help in rehabilitation of injured [5], prosthetics and assistance to elders. We develop robot capable of doing wide variety
of works in place of humans. A human-inspired method for achieving bipedal robotic walking is proposed in which a hybrid
model [6] of a human is used in conjunction with experimental walking data to obtain a multi-domain hybrid system.
Humanoid locomotion modeling and generation of rhythmic pattern is considered as a highly complex and non-linear problem. There is lot of research already done in the field of bipedal locomotion. There are several methodologies which have been used to
attain the insight of biped locomotion. Kiyotoshi Matsouka [7] has described how simple neurons can be connected together to
design a neural oscillator [8] to produce rhythmic patterns for given input parameters.
We seek to find a new way toward automatically generating stable flat ground biped robotic walking from human gait
combined with human inspired control which displays a universal behavior. Human walking is realized the several DoF (Degrees
of Freedom) coupled with highly non-linear dynamics and forces such that the (velocity of) leg comes to rest when it strikes the
ground [9] [10]. So we try to obtain a low dimensional representation of human walking and modeling the continuous and discrete
behavior through hybrid systems [11] [12].
The hybrid system [13] is a dynamic system which has both continuous and discrete components. To represent such type of
system we apply hybrid automata representation [14] [15]. To manifest both components, flow is represented by a differential
equation while jump can be described by a difference equation or control graph allowing for more flexibility in modeling dynamic
phenomena. There are several systems which can be modeled using the Hybrid systems [16] [17], such as physical system with impact, logic-dynamic controllers, and even internet congestion to name a few [18] [19]. In general, the state of a
hybrid system [20] [21] is defined by the values of the continuous variables and a discrete control mode [22] [23]. The state
evolution is governed either, continuously according to a flow condition, or discretely according to a control graph. Continuous
flow dictates, as long as so-called invariants hold true, while discrete transitions occur as soon as stated jump conditions are agreed
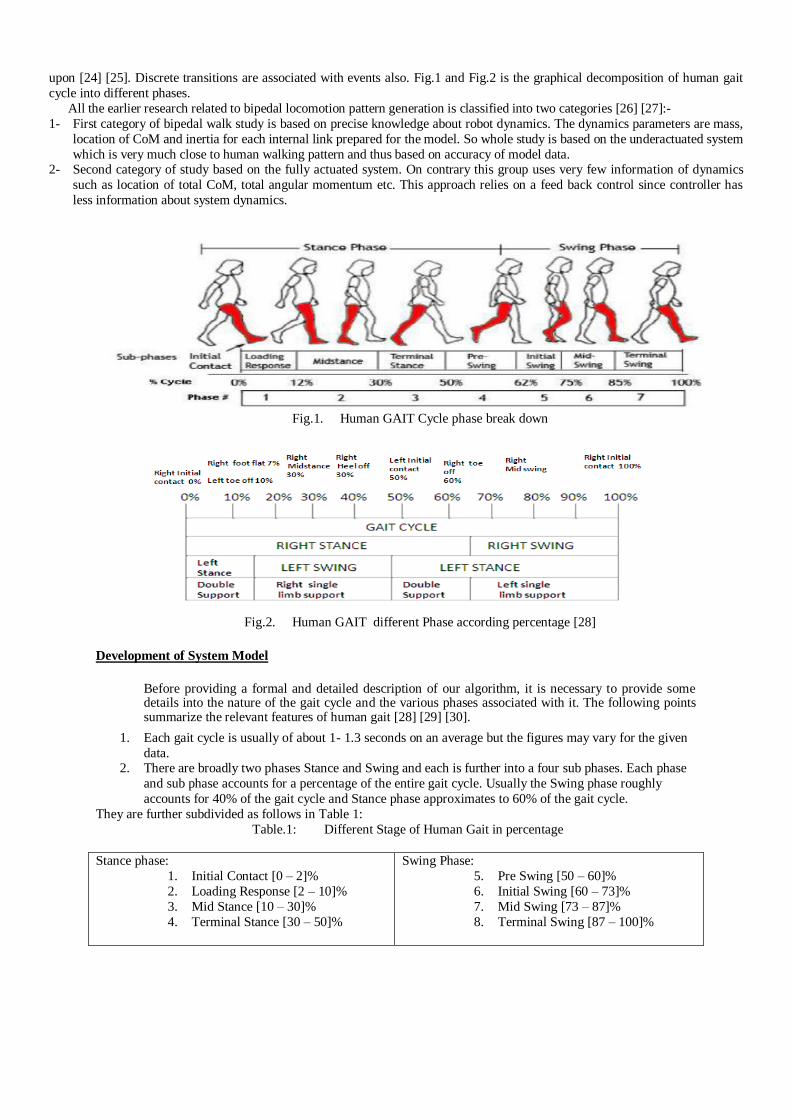
upon [24] [25]. Discrete transitions are associated with events also. Fig.1 and Fig.2 is the graphical decomposition of human gait
cycle into different phases.
All the earlier research related to bipedal locomotion pattern generation is classified into two categories [26] [27]:-
1- First category of bipedal walk study is based on precise knowledge about robot dynamics. The dynamics parameters are mass,
location of CoM and inertia for each internal link prepared for the model. So whole study is based on the underactuated system
which is very much close to human walking pattern and thus based on accuracy of model data. 2- Second category of study based on the fully actuated system. On contrary this group uses very few information of dynamics
such as location of total CoM, total angular momentum etc. This approach relies on a feed back control since controller has
less information about system dynamics.
Fig.1. Human GAIT Cycle phase break down
Fig.2. Human GAIT different Phase according percentage [28]
Development of System Model
Before providing a formal and detailed description of our algorithm, it is necessary to provide some details into the nature of the gait cycle and the various phases associated with it. The following points summarize the relevant features of human gait [28] [29] [30].
1. Each gait cycle is usually of about 1- 1.3 seconds on an average but the figures may vary for the given
data. 2. There are broadly two phases Stance and Swing and each is further into a four sub phases. Each phase
and sub phase accounts for a percentage of the entire gait cycle. Usually the Swing phase roughly
accounts for 40% of the gait cycle and Stance phase approximates to 60% of the gait cycle.
They are further subdivided as follows in Table 1:
Table.1: Different Stage of Human Gait in percentage
Stance phase:
1. Initial Contact [0 – 2]%
2. Loading Response [2 – 10]%
3. Mid Stance [10 – 30]%
4. Terminal Stance [30 – 50]%
Swing Phase:
5. Pre Swing [50 – 60]%
6. Initial Swing [60 – 73]%
7. Mid Swing [73 – 87]%
8. Terminal Swing [87 – 100]%
These timestamps are not very sharp and distinct that is, in other words the decision boundaries
between the different sub phases have an inherent fuzziness associated with them [31] . There might be
missing timestamps and other data points in the training dataset[32] , hence the system was first trained
on a rigorous human annotated and almost error free standard dataset [33] [34]. Subsequently other
data sets were added to it in order to enrich it. As mentioned before the sampling rate of the data plays
a very important role, as under sampling as well as oversampling require minor tweaking of our
algorithm.
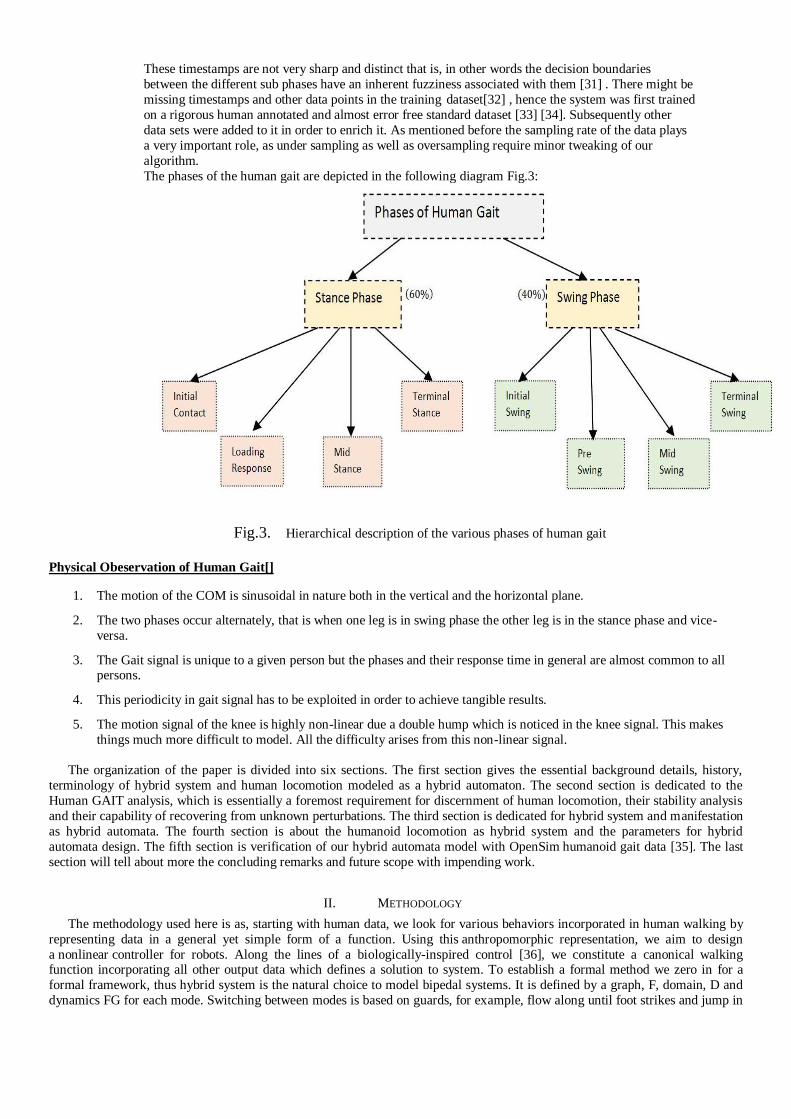
The phases of the human gait are depicted in the following diagram Fig.3:
Fig.3. Hierarchical description of the various phases of human gait
Physical Obeservation of Human Gait[]
1. The motion of the COM is sinusoidal in nature both in the vertical and the horizontal plane.
2. The two phases occur alternately, that is when one leg is in swing phase the other leg is in the stance phase and vice-
versa.
3. The Gait signal is unique to a given person but the phases and their response time in general are almost common to all persons.
4. This periodicity in gait signal has to be exploited in order to achieve tangible results.
5. The motion signal of the knee is highly non-linear due a double hump which is noticed in the knee signal. This makes
things much more difficult to model. All the difficulty arises from this non-linear signal.
The organization of the paper is divided into six sections. The first section gives the essential background details, history,
terminology of hybrid system and human locomotion modeled as a hybrid automaton. The second section is dedicated to the
Human GAIT analysis, which is essentially a foremost requirement for discernment of human locomotion, their stability analysis
and their capability of recovering from unknown perturbations. The third section is dedicated for hybrid system and manifestation
as hybrid automata. The fourth section is about the humanoid locomotion as hybrid system and the parameters for hybrid
automata design. The fifth section is verification of our hybrid automata model with OpenSim humanoid gait data [35]. The last
section will tell about more the concluding remarks and future scope with impending work.
II. METHODOLOGY
The methodology used here is as, starting with human data, we look for various behaviors incorporated in human walking by
representing data in a general yet simple form of a function. Using this anthropomorphic representation, we aim to design
a nonlinear controller for robots. Along the lines of a biologically-inspired control [36], we constitute a canonical walking function incorporating all other output data which defines a solution to system. To establish a formal method we zero in for a
formal framework, thus hybrid system is the natural choice to model bipedal systems. It is defined by a graph, F, domain, D and
dynamics FG for each mode. Switching between modes is based on guards, for example, flow along until foot strikes and jump in
a cyclic manner. System with model described as 12-dimension state space consisting of angle and velocity of system
position.Fig.4 is the whole working of bio-inspired hybrid control of human walk.
.
Fig.4. Humanoid Locomtion Generation Behaviour
Theory of Hybrid Automata
A hybrid automaton is used to model any system which has both discrete and continuous states. These hybrid systems form the
core components of most embedded systems today hence; ways to model these in an efficient and effective manner is the real
challenge. This automaton fits our purpose because human gait inherently consists of both discrete (stance) phase and continuous
(swing) phase. These phases are further subdivided into several atomic phases which will form the basis for our system design.
The particular class of hybrid automata that we are interested in is the Alur – Henzinger Hybrid Automata [37] [38].
Dynamical System Classification: The hybrid system represents a dynamic system whose states evolve over a period of time.
The dynamics of the system is sensitive to external inputs such as random disturbances or deterministic control signals [40] [41].
Along with admissible inputs, dynamical systems may also have outputs corresponding to measurable or to be monitored quantities, such types of systems are known as control systems. Thus depending on the type of states, dynamic systems can be
classified as following:
Continuous Dynamical System: If state of a dynamic system, x ∈ Rn, has a value in Euclidean space ∀ n ≥ 1, then the system is
continuous dynamic system.
Discrete Dynamical System: When the system state values belongs to countable or finite set, e.g. x1, x2,….
Hybrid Dynamical System [42]: If a dynamical system consists of sub-systems such the state of one system is
continuous ∈ Rn while another system has discrete state belonging to a finite set. The human walk is considered as a hybrid system, which exhibits both the discrete and continuous behaviors. The whole human GAIT cycle can be broadly classified into
two phases, swing (continuous) and stance (discrete) [14].
Hybrid automata will help to generate the biologically inspired controller [15] [16]. The paper argues that state jumps are
basic hybrid phenomenon that cannot be represented and analyzed by method elaborated either in continuous and discrete system
theory, separately. A system has to be considered as a hybrid system if both continuous movement and the state jumps are
important for the control task to be solved [12]. Fig. 5 is the our developed model in webots and table 2 is the parameters which
We used to developed for our model.
Fig.5. Simulated Model
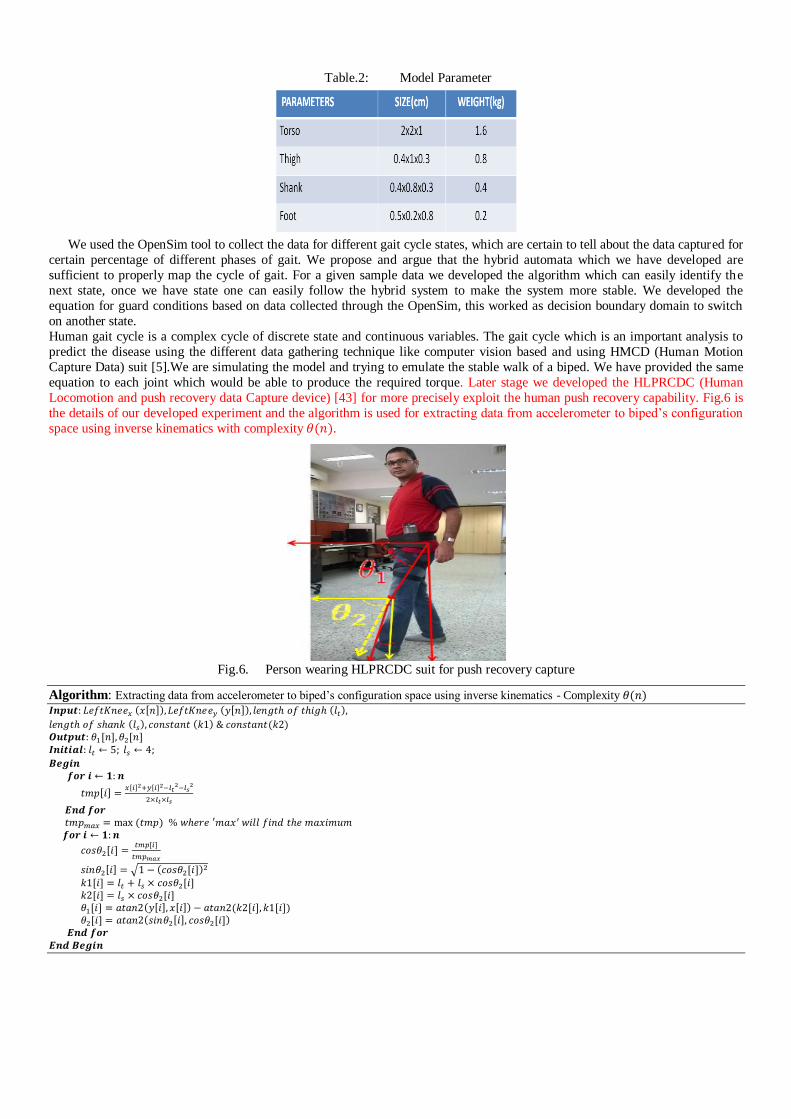
Table.2: Model Parameter
We used the OpenSim tool to collect the data for different gait cycle states, which are certain to tell about the data captured for
certain percentage of different phases of gait. We propose and argue that the hybrid automata which we have developed are
sufficient to properly map the cycle of gait. For a given sample data we developed the algorithm which can easily identify the
next state, once we have state one can easily follow the hybrid system to make the system more stable. We developed the
equation for guard conditions based on data collected through the OpenSim, this worked as decision boundary domain to switch
on another state.
Human gait cycle is a complex cycle of discrete state and continuous variables. The gait cycle which is an important analysis to
predict the disease using the different data gathering technique like computer vision based and using HMCD (Human Motion
Capture Data) suit [5].We are simulating the model and trying to emulate the stable walk of a biped. We have provided the same
equation to each joint which would be able to produce the required torque. Later stage we developed the HLPRCDC (Human
Locomotion and push recovery data Capture device) [43] for more precisely exploit the human push recovery capability. Fig.6 is
the details of our developed experiment and the algorithm is used for extracting data from accelerometer to biped’s configuration
space using inverse kinematics with complexity .
Fig.6. Person wearing HLPRCDC suit for push recovery capture
Algorithm: Extracting data from accelerometer to biped’s configuration space using inverse kinematics - Complexity
%

A hybrid automaton is a dynamical system that describes the evolution of the valuations of a set of discrete and continuous
variables over time. A hybrid control system in a cycle is a tuple,
∈
∈
∈
∈
∈ ∈
A hybrid system is a hybrid control system where Uv = Φ for all v ∈ V, i.e., where feedback controllers have been applied. Thus,
we write:
Fig.7. Domain Break Down of Humanoid Locomotion
The complete gait cycle consists of eight states, dicscriminated by change from either continous to discrete state or discrete to
continuous state. Fig. 7 is the complete domain break down of Humanoid locomotion and Fig.8 is hybrid automata parameter tune
for our system.
Fig.8. Hybrid automata parameter
Universal Canonical Equation:
f(x) = a1*sin(b1*x+c1)+ a2*sin(b2*x+c2)+ a3*sin(b3*x+c3)+ a4*sin(b4*x+c4)+ a5*sin(b5*x+c5)+ a6*sin(b6*x+c6) –(1)
A single equation more or less covers all the six joint motion output equations, which can be realized using polynomials, but their
higher degree makes it computationally inefficient. We finally end up using functions which is sum of sines.
III. EXPERIMENTAL RESULTS AND ANALYSIS
Our Model:-The Model has total 6 Degree of freedom. 3 for each leg and the dynamics and model parameters are defined in
table1. Fig.9 is the ideal curve of different joints and Fig.10 is the details of the our Automata Implementation.
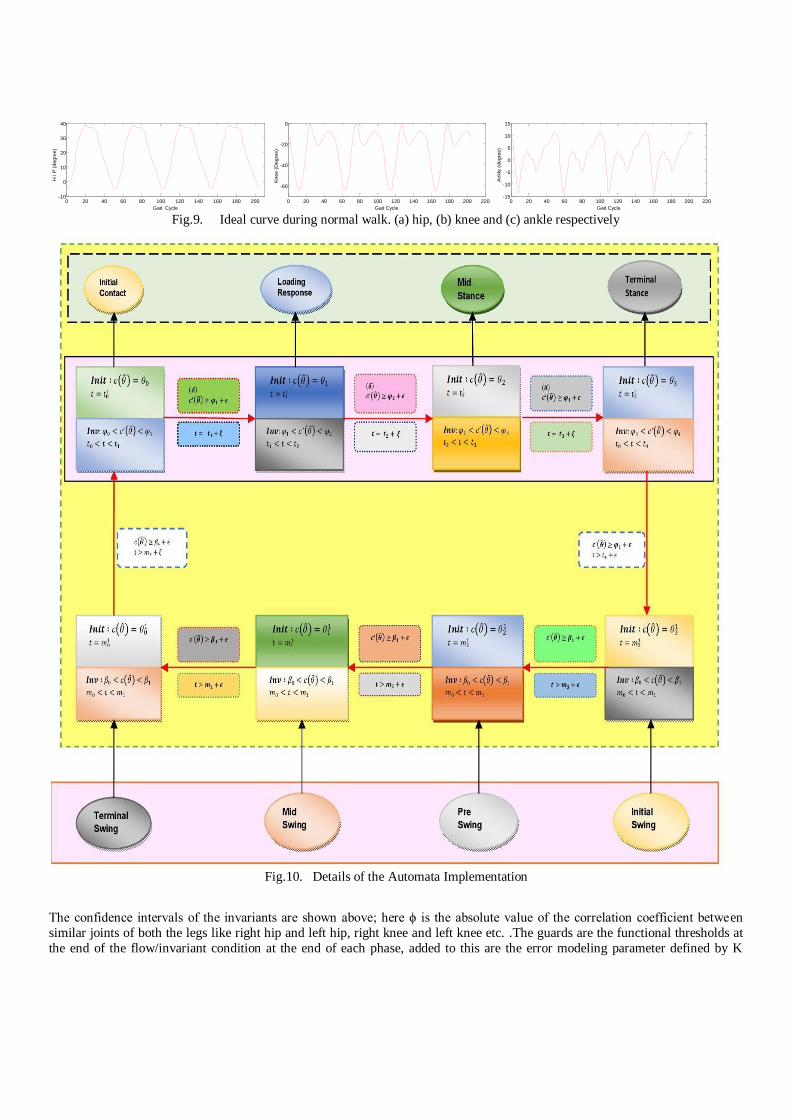
Fig.9. Ideal curve during normal walk. (a) hip, (b) knee and (c) ankle respectively
Fig.10. Details of the Automata Implementation
The confidence intervals of the invariants are shown above; here ϕ is the absolute value of the correlation coefficient between
similar joints of both the legs like right hip and left hip, right knee and left knee etc. .The guards are the functional thresholds at
the end of the flow/invariant condition at the end of each phase, added to this are the error modeling parameter defined by K
0 20 40 60 80 100 120 140 160 180 200-10
0
10
20
30
40
Gait Cycle
H I
P (
de
gre
e)
0 20 40 60 80 100 120 140 160 180 200 220
-60
-40
-20
0
Gait Cycle
Kn
ee
(D
eg
ree
)
0 20 40 60 80 100 120 140 160 180 200 220-15
-10
-5
0
5
10
15
Gait Cycle
An
kle
(d
eg
ree
)
(slackness coefficient). The probability is calculated as the weighted mean of the degree of overlap between the joint angle values
and the time at the moment of transition between the two states. Thus, the probability is actually a measure of the degree of error
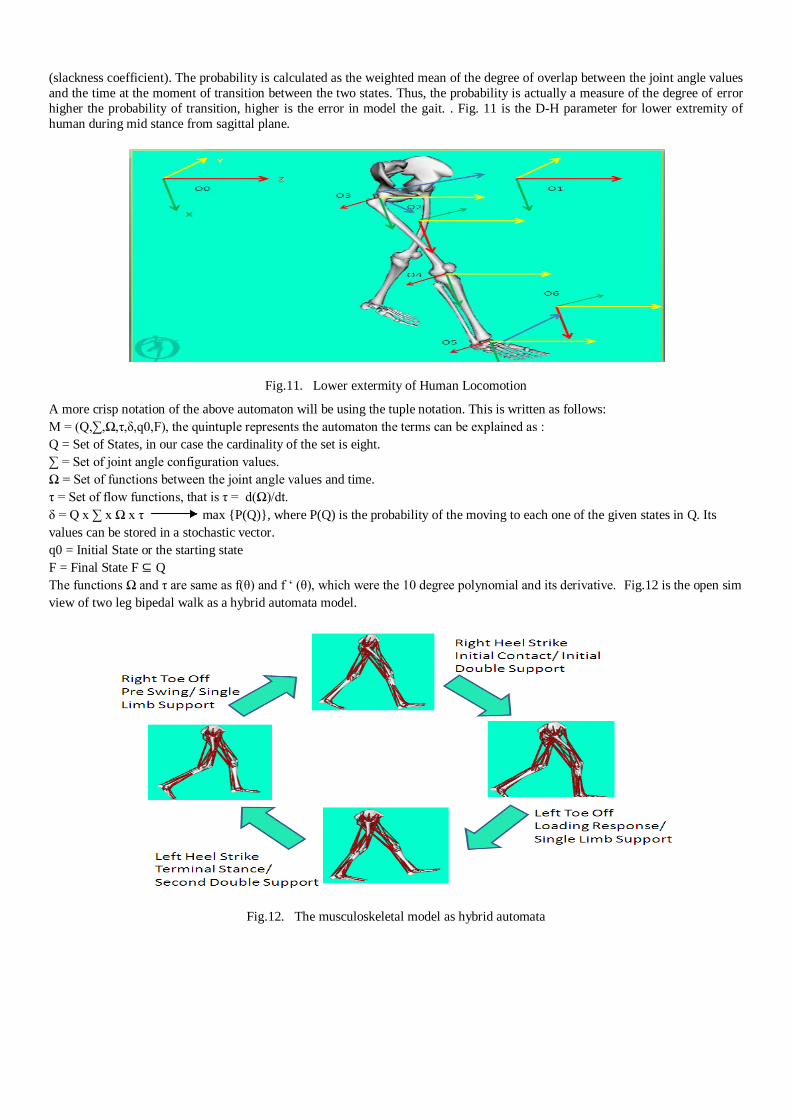
higher the probability of transition, higher is the error in model the gait. . Fig. 11 is the D-H parameter for lower extremity of
human during mid stance from sagittal plane.
Fig.11. Lower extermity of Human Locomotion
A more crisp notation of the above automaton will be using the tuple notation. This is written as follows:
M = (Q,∑,Ω,τ,δ,q0,F), the quintuple represents the automaton the terms can be explained as :
Q = Set of States, in our case the cardinality of the set is eight.
∑ = Set of joint angle configuration values.
Ω = Set of functions between the joint angle values and time.
τ = Set of flow functions, that is τ = d(Ω)/dt.
δ = Q x ∑ x Ω x τ max P(Q), where P(Q) is the probability of the moving to each one of the given states in Q. Its
values can be stored in a stochastic vector.
q0 = Initial State or the starting state
F = Final State F Q
The functions Ω and τ are same as f(θ) and f ‘ (θ), which were the 10 degree polynomial and its derivative. Fig.12 is the open sim
view of two leg bipedal walk as a hybrid automata model.
Fig.12. The musculoskeletal model as hybrid automata

Hybrid Systems-The Framework
A hybrid system is a tuple
H = (T, D, G, R, F)
E = RHS, LTL, LTL, LHS, LHS, RTL, RTL, RHS
D = Set of domains, U = Set of admissible control G = Set of guards/switching surfaces R = Set of reset maps, F = Dynamical
System
Where T = (V, E) is directed cycle, and
V = RHS, LTL, LHS, RTL
Fig.13. Verification of Hybrid automata model
Fig.13 is the joint angle view of different joints (Hip, Knee and Ankle) and torque corresponding to joint. Hybrid System is
challenging in the way that it contains switching dynamics at arbitrary times. Traditional path-planning methods (suitable for
high-dimensional system but not for discrete structure) and combinatorial approach (for purely discrete problems) fail to serve the
purpose of walking.
In biped normal walk it is known apriori which leg will lift off or strikes ground at a given time instant. Modeling biped as a 5-
link tree structured multibody with 2 two-link legs and a turning torso. The motion is constrained to 2-dimensional vertical sagittal plane. Thus we consider only forward, steady-state motion without yaw effects or lateral movement.
Human data for joint angle trajectories or their linear combination can be used and then form functions to fit these trajectories.
Applied Lagrangian equations yield a dynamic model that governs the system in a continuous manner. Making joint angles as
base criteria we divide the complete gait cycle into eight different stages starting from initial contact (indicated by an arrow), then
going to loading response, mid stance, terminal stance, pre-swing, initial contact, mid-swing and ending on terminal swing (refer
Fig. 13). Angle positions of joints are given by equation (2) to (7).
- (2)
- (3)
- (4)

These time-variant joint motion equations produce the exact pattern of the gait, tested on our simulated model through controller.
Joint moments are given by the equations:
- (5)
- (6)
- (7)
Similarly, time-variant joint moment equations are applied to respective joints in the form of actuation.
We applied this equation to our model and found similar human walk pattern with 8 stages. These stages differ from one another
depending on the values of parameters such as joint angles, height of foot from surface and impact parameters. By taking the data
set for normal walking from OpenSim, we form equations of joint angles over a complete gait cycle. When these equations are
applied to model in Webots, we get different phases covering certain percentage of gait cycle. Based on these parameters, joint
angles and moments, we define a representative model, and for such type of system we make use of hybrid automata, describing
all the states of locomotion. Thus, we verified our stated model by simulating it using controller to generate all the eight states.
Fig.14 is the verification of our parameter as hybrid system.
Fig.14. Different parameter of Human GAIT
IV. CONCLUSION, IMPENDING WORK AND AND DISCUSSIONS
We frame the problem of finding the best possible gait for a biped under some perturbation and then balancing itself
towards stable gait as a hybrid control system problem. Our prima facie results demonstrate the power and potential of hybrid system. The problem as a whole is audacious in hybrid control, and this work puts forward first steps in the direction of paving
way for efficient tools for handling such type of problems. We developed the biological inspired controller for humanoid walk.
The hybrid automaton has been extended for eight stages of humanoid locomotion. We achieved that our verified model is about
to tell different stage of GAIT cycle [18] and we verified the model using best human dynamic parameter. We simulated the
model with flat foot and applied various physical parameters and tried to mimic the exact real world model. The whole gait cycle,
which takes 1.5-2.0 seconds, defines various continuous and discrete dynamic parameters and exposed the importance of
balancing. The study can facilitate future development. We synthesized the universal canonical equation which is able to produce
exact GAIT pattern by providing various parameter values to different study. The similar study can help to understand the push
recovery and we will extend the hybrid automata model for the different magnitude push. The Challenges have been met and
overcome. We have made an attempt to look at human gait from a completely different perspective. Also, we have heavily
borrowed from the domain of automata theory, and incorporated machine learning to devise our own algorithm for error correction. Considerable effort has been made to base our model on solid theoretical foundations and common sense logic. In
doing so, we have made use of the above mentioned theoretical tools, simulation software like OpenSim and Matlab to verify the
correctness of our model. Human Gait being a non-linear dynamic system has been the cynosure of many varied disciplines like
Robotics, Mechanics, Bio-mechanics etc. We have made an attempt to provide a new direction to the age old problem of bipedal
locomotion. It was exhilarating as well as frustrating for us to work on this problem, but ultimately we proved to be the better of
ourselves and got the model in a working state.
The impeding future work is data for more forms of walking Canonical Equation has six terms, so a dimensional
reduction is required CE must be time independent Applying equations on a generic model Domain Breakdown. In future we will
extend our hybrid automata system for humanoid push recovery and for different walking patter i.e. brisk walk, running etc.Using Cellular Automata to Model Human Gait. BIP framework forms the centerpiece of our modeling technique.
REFERENCES
1. B.Nardi et.al. "Context and consciousness:actiivty theory and human-computer interaction.MIT Press,1996.
2. McGeer, Tad. "Passive dynamic walking." the international journal of robotics research 9, no. 2 (1990): 62-82.
3. T.A.Henzinger. The theory of hybrid automata. In proceeding of 11th Annual IEEE Symposium on Logic in Computer
Science, page278-292.IEEE Computer Society Press,1996.
4. V.B. Semwal, Vivek, P.Chakarvarty and G.C. Nandi- Biped model based on parameter of human gait pattern for lateral
plane movement, International Conference on control, automation, robotics & embedded System- CARE13,2013. 5. V.B. Semwal, Vivek, P.Chakarvarty and G.C. Nandi- Study of Humanoid Push Recovery Based on Experiments,
International Conference on control, automation, robotics & embedded System- CARE13, 2013.
6. Lee, J. O., Lee, Y. S., Lee, S. H., Choi, Y. J., & Park, S. H. (2007). Biomechanical Analysis on the Foot under Normal
and Abnormal Gait for Orthotics Design. Key Engineering Materials, 353, 2179-2182.
7. Matsuoka, Kiyotoshi. "Mechanisms of frequency and pattern control in the neural rhythm generators." Biological
Cybernetics 56, no. 5-6 (1987): 345-353.
8. Vijay Bhaskar Semwal, Manish Raj, G.C. Nandi, Multilayer perceptron based biometric GAIT identification, Robotics
and Autonomous Systems, Available online 21 November 2014.
9. Gupta, Jay Prakash, et al. "Human activity recognition using gait pattern."International Journal of Computer Vision and
Image Processing (IJCVIP) 3.3 (2013): 31-53.
10. Jay Prakash Gupta et al. Analysis of Gait Pattern to Recognize the Human Activities , arXiv preprint arXiv:1407.4867, 2014.
11. Ames, Aaron David. "Hybrid Model Structures." PhD diss., University of California, 2006.
12. Hardt, M., and O. Von Stryk. "Towards optimal hybrid control solutions for gait patterns of a quadruped." In CLAWAR:
Int. Conf. on Climbing and Walking Robots, pp. 385-392. 2000. 13. R. Alur and T.A. Henzinger. Modularity for timed and hybrid systems. Proceedings of the Ninth International
Conference on Concurrency Theory, LNCS 1243, pp. 74--88, 1997.
14. Simić, Slobodan N., Karl Henrik Johansson, Shankar Sastry, and John Lygeros. "Towards a geometric theory of hybrid
systems." In Hybrid Systems: Computation and Control, pp. 421-436. Springer Berlin Heidelberg, 2000.
15. Bemporad, Alberto, WP Maurice H. Heemels, and Bart De Schutter. "On hybrid systems and closed-loop MPC systems." IEEE Transactions on Automatic Control, 47, no. 5 (2002): 863-869.
16. Aubin, J-P., John Lygeros, Marc Quincampoix, Shankar Sastry, and Nicolas Seube. "Impulse differential inclusions: a
viability approach to hybrid systems."Automatic Control, IEEE Transactions on 47, no. 1 (2002): 2-20.
17. Chutinan, Alongkrit, and Bruce H. Krogh. "Computational techniques for hybrid system verification." Automatic
Control, IEEE Transactions on 48, no. 1 (2003): 64-75.
18. Lygeros, John, Karl Henrik Johansson, Slobodan N. Simic, Jun Zhang, and Shankar S. Sastry. "Dynamical properties of
hybrid automata." Automatic Control, IEEE Transactions on 48, no. 1 (2003): 2-17.
19. Collins, Steve, Andy Ruina, Russ Tedrake, and Martijn Wisse. "Efficient bipedal robots based on passive-dynamic
walkers." Science 307, no. 5712 (2005): 1082-1085.
20. Sinnet, Ryan W., and Aaron D. Ames. "3D bipedal walking with knees and feet: A hybrid geometric
approach." Decision and Control, 2009 held jointly with the 2009 28th Chinese Control Conference. CDC/CCC 2009. Proceedings of the 48th IEEE Conference on. IEEE, 2009.
21. Benbrahim, Hamid, and Judy A. Franklin. "Biped dynamic walking using reinforcement learning." Robotics and
Autonomous Systems 22.3 (1997): 283-302.
22. Grizzle, Jessy W., Christine Chevallereau, Aaron D. Ames, and Ryan W. Sinnet. "3D bipedal robotic walking: models,
feedback control, and open problems." In IFAC Symposium on Nonlinear Control Systems. 2010.
23. Sinnet, Ryan W., Matthew J. Powell, Rajiv P. Shah, and Aaron D. Ames. "A human-inspired hybrid control approach to
bipedal robotic walking." In 18th IFAC World Congress, pp. 6904-11. 2011.
24. Erika Ottaviano, Sergey Vorotnikov, Marco Ceccarelli, Pavel Kurenev, Design improvements and control of a hybrid
walking robot, Robotics and Autonomous Systems, Volume 59, Issue 2, February 2011, Pages 128-141.
25. Jan Murray and Frieder Stolzenburg. Hybrid state machines with timed synchronization for multi-robot system
specification. In Carlos Bento et al., editors, Proceedings of 12th Portuguese Conference on Artificial Intelligence , pages
236–241. IEEE Inc, 2005.
26. Stephens, Benjamin. "Humanoid push recovery." Humanoid Robots, 2007 7th IEEE-RAS International Conference on.
IEEE, 2007.
27. Thelen, D.G., Anderson, F.C. Using computed muscle control to generate forward dynamic simulations of human walking from experimental data, Journal of Biomechanics, vol. 39, pp. 1107-1115, 2006.
28. D. Tlalolini, C. Chevallereau, Y. Aoustin, Comparison of different gaits with rotation of the feet for a planar biped,
Robotics and Autonomous Systems, Volume 57, Issue 4, 30 April 2009, Pages 371-383.
29. Fumiya Iida, Yohei Minekawa, Jürgen Rummel, André Seyfarth, Toward a human-like biped robot with compliant legs,
Robotics and Autonomous Systems, Volume 57, Issue 2, 28 February 2009, Pages 139-144.
30. Hurmuzlu, Yildirim, Frank Génot, and Bernard Brogliato. "Modeling, stability and control of biped robots—a general
framework." Automatica 40.10 (2004): 1647-1664.
31. Vijay Bhaskar Semwal, Pavan Chakraborty, G.C. Nandi, Less computationally intensive fuzzy logic (type-1)-based
controller for humanoid push recovery, Robotics and Autonomous Systems, Volume 63, Part 1, Pages 122-135.
32. Aphiratsakun, Narong, Kittipat Chairungsarpsook, and Manukid Parnichkun. "ZMP based gait generation of AIT's Leg
Exoskeleton." Computer and Automation Engineering (ICCAE), 2010 The 2nd International Conference on. Vol. 5.
IEEE, 2010. 33. ONN, N., HUSSEIN, M., TANG, C. H. H., ZAIN, M. Z. M., MOHAMAD, M., & YING, L. Motion Control of Seven-
Link Human Bipedal Model..
34. Schulte, Horst, and Kevin Guelton. "Modelling and simulation of two-link robot manipulators based on Takagi Sugeno
fuzzy descriptor systems." Industrial Technology, 2006. ICIT 2006. IEEE International Conference on. IEEE, 2006.
35. Delp, S.L., Anderson, F.C., Arnold, A.S., Loan, P., Habib, A., John, C.T., Guendelman, E., Thelen, D.G. OpenSim:
Open-source software to create and analyze dynamic simulations of movement. IEEE Transactions on Biomedical
Engineering, vol. 55, pp. 1940-1950, 2007.
36. Lorenzo Riano, T.M. McGinnity, Automatically composing and parameterizing skills by evolving Finite State Automata,
Robotics and Autonomous Systems, Volume 60, Issue 4, April 2012, Pages 639-650.
37. Javier de Lope, Darío Maravall, Yadira Quiñonez, Response threshold models and stochastic learning automata for self-
coordination of heterogeneous multi-task distribution in multi-robot systems, Robotics and Autonomous Systems, Volume 61, Issue 7, July 2013, Pages 714-720.
38. Chan, C. Y. A. (2000). Dynamic modeling, control and simulation of a planar five-link bipedal walking system..
39. Aphiratsakun, N., Chirungsarpsook, K., & Parnichkun, M. (2008). Design and Balancing Control of AIT Leg
EXoskeleton-I (ALEX-I). In ICINCO-RA (1) (pp. 151-158)..
40. Sreenath, Koushil, Connie R. Hill Jr, and Vijay Kumar. "A partially observable hybrid system model for bipedal
locomotion for adapting to terrain variations."Proceedings of the 16th international conference on Hybrid systems:
computation and control. ACM, 2013.
41. A. Spröwitz, R. Moeckel, M. Vespignani, S. Bonardi, A.J. Ijspeert, Roombots: A hardware perspective on 3D self-
reconfiguration and locomotion with a homogeneous modular robot, Robotics and Autonomous Systems, Volume 62,
Issue 7, July 2014.
42. Sreenath, Koushil, Connie R. Hill Jr, and Vijay Kumar. "A partially observable hybrid system model for bipedal
locomotion for adapting to terrain variations." Proceedings of the 16th international conference on Hybrid systems: computation and control. ACM, 2013.
43. https://sites.google.com/site/wwwvbsemwalcom/research
.
Shiv Ashutosh Katiyar obtained his B.Tech. in Electronics & Communication Engineering from
the Shri Ramswaroop Memorial College of Engineering & Management, Lucknow in 2010. He
received his M.Tech. in Information Technology (Specialization in Robotics) from IIIT Allahabad in 2014. Currently, he is working as Software Engineer at Verizon Data Services India (VDSI) Pvt Ltd,
Chennai. He qualified the prestigious Graduate Aptitude Test for Engineering (GATE). His research
interests are machine learning, analysis of biped locomotion and humanoid push recovery, artificial
intelligence, control system, non-linear dynamics, humanoid robotics and hybrid system.

Rupak Chakraborty is an undergraduate student at the Indian Institute of Information Technology,
Allahabad. Presently he is in his senior year, his interests lie in Machine, Artificial Intelligence, Robotics, Computer Vision and allied fields. Apart from this he takes an avid interest in Algorithms
and Data-structures. He will be joining Adobe Systems, India from July, 2015 after his graduation.
Prof.G.C.Nandi graduated from Indian Institute of Engineering, Science & Technology (Formerly
Bengal Engineering College, Shibpur, Calcutta University), in 1984 and post graduated from
Jadavpur University, Calcutta in 1986. He obtained his PhD degree from Russian Academy of
Sciences, Moscow in 1992. He was awarded National Scholarship by Ministry of Human Resource Development (MHRD), Govt of India in 1977 and Doctoral Fellowship by External Scholarship
Division, MHRD, Govt. of India in 1988. During 1997 he was visiting research scientist at the
Chinese University at Hong Kong and he was also visiting Faculty with Institute for Software
Research, School of Computer Sciences, Carnegie Mellon University, USA, ( 2010- 2011).
Currently, he is serving as the senior most Professor and Dean of Academic Affairs of Indian
Institute of Information Technology, Allahabad. From January to July 2014, he served as the
Director-in-Charge of Indian Institute of Information Technology, Allahabad. Professor Nandi is the
Senior Member of ACM, Senior member of IEEE, Chairman, ACM-IIIT-Allahabad Professional
Chapter, (2009-2010), Chartered Member of Institute of Engineers (India),Member of DST (Department of Science and
Technology, Govt. of India) Program Advisory Committee member of Robotics, Mechanical and Manufacturing Engineering. He
has published more than 100 papers in the various refereed journals and international conferences. His research interest includes robotics specially biped locomotion control & humanoid push recovery, artificial intelligence, soft computing and computer
controlled systems.





























