Embed Size (px)
Citation preview

http://jvc.sagepub.com
Journal of Vibration and Control
DOI: 10.1177/1077546307077491 2007; 13; 1487 Journal of Vibration and Control
Carla M.A. Pinto Numerical Simulations in Two CPG Models for Bipedal Locomotion
http://jvc.sagepub.com/cgi/content/abstract/13/9-10/1487 The online version of this article can be found at:
Published by:
http://www.sagepublications.com
can be found at:Journal of Vibration and Control Additional services and information for
http://jvc.sagepub.com/cgi/alerts Email Alerts:
http://jvc.sagepub.com/subscriptions Subscriptions:
http://www.sagepub.com/journalsReprints.navReprints:
http://www.sagepub.com/journalsPermissions.navPermissions:
http://jvc.sagepub.com/cgi/content/refs/13/9-10/1487SAGE Journals Online and HighWire Press platforms):
(this article cites 25 articles hosted on the Citations
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

Numerical Simulations in Two CPG Models forBipedal Locomotion
CARLA M. A. PINTOSuperior Institute of Engineering of Porto and Center of Mathematics of University of Porto,PORTUGAL ([email protected])
(Received 29 April 2006� accepted 12 July 2006)
Abstract: Pinto and Golubitsky proposed a new model for a central pattern generator (CPG) for arm/legcoordination in bipeds, the network arm. arm is derived from a CPG quadruped model (quad) by breakingthe symmetry between fore- and hind limbs.
This paper explores numerically some of the solution properties of two general CPG models: arm and aCPG model for leg rhythms in bipeds (which is called leg). It is assumed that the internal dynamics of eachcell is modeled by a space-clamped Hodgkin–Huxley equation and the coupling is only through the voltageterm. Numerical simulations are done using XPPAUT. Secondary gaits in leg are obtained from bifurcationof the Poincaré map of a primary gait. Examples of secondary gaits are gallop, asymmetric hop, one-leggedhop, and skip. In particular, the gallop is obtained by bifurcation from the primary gait two-legged jump.Numerical evidence of this is shown. Numerical simulations are given of periodic solutions in arm identifiedwith arm/leg coordination patterns in bipeds.
Keywords: Central pattern generators, symmetries, bipedal gaits, numerical simulations
1. INTRODUCTION
Vertebrate locomotion is often assumed to be controlled by a central pattern generator (CPG)capable of producing the rhythms associated to different gaits (Cohen et al., 1982, 1992�Hiebert et al., 1996� English, 1979� Grillner et al., 1988� Pearson, 1993). CPGs are com-monly modeled as networks of identical systems of differential equations, where the individ-ual systems, which we call cells, model neurons or more plausibly collections of neurons.The existence of locomotor CPGs in mammals has not been established, nevertheless, weassume that locomotor CPGs do exist. See also Calancie et al. (1994), Duysens (1998),Dimitijevic et al. (1998) and Bussel et al. (1996). Golubitsky et al. (1998, 1999), Buono(2001) and Buono and Golubitsky (2001) observe that it is possible to construct a singleeight-cell network, which we call quad, that can produce periodic solutions correspondingto leg movements in a variety of common quadrupedal gaits. quad is pictured in Figure 1(left). The analogous four-cell CPG model, which we call leg, produces leg rhythms inbipeds. See Figure 2. In Pinto and Golubitsky (2005) we introduce a third CPG arm (see
Journal of Vibration and Control, 13(9–10): 1487–1503, 2007 DOI: 10.1177/1077546307077491
��2007 SAGE Publications Los Angeles, London, New Delhi, Singapore
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1488 C. M. A. PINTO
Figure 1. Eight-cell CPGs: (left) quad� (right) arm. See text for explanation. Note: LF = left fore leg andLH = left hind leg in quad and LA = left arm and LL = left leg in arm.
Figure 2. CPG network leg for the control of biped legs. Cells 1 and 3 send signals to the left leg, cells 2and 4 send signals to the right leg.
Figure 1 (right)) to explore interlimb coordination between arms and legs in biped gaits. Thenetwork arm is derived by breaking symmetry between the fore and hindlegs in quad.
We address two main topics.
1. We review the work of Pinto and Golubitsky (2005) about CPGs leg and arm in orderto set the context. leg supports 10 different symmetry types of periodic solutions withnontrivial rhythms: walk and run (identified in Golubitsky et al., 1999), and six additionaltypes, two-legged hop, two-legged jump, skip, gallop, asymmetric hop, and one-leggedhop. As to results in arm, we found that small perturbations of the three quadruped gaitsof pronk, trot, and transverse jump can be identified with the usual arm/leg coordinationpatterns in the biped gaits of two-legged hop, run, and gallop, respectively.
2. We explore numerically some of the solution properties of the general CPG biped models,leg and arm. We consider the internal dynamics of each cell modeled by a space-clampedHodgkin–Huxley equation and the coupling is only through the voltage term. Secondary
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from
NUMERICAL SIMULATIONS IN TWO CPG MODELS 1489
gait types in leg are obtained by following branches of primary gaits until a bifurcationoccurs. We show periodic solutions in arm identified with arm/leg coordination rhythmsin bipeds.
2. LEG RHYTHMS IN BIPEDS: NETWORK leg
In this section, we review the results in Pinto and Golubitsky (2005) concerning networkleg and explore numerically properties of the solutions of leg. We start by introducing thegeneral system of ODEs in section 2.1. In Section 2.2, we summarize the classification ofsymmetry types of periodic solutions to (2.1), the system of ODEs associated with networkleg, and the relationship between these symmetry types and the rhythms of known bipedgaits. In Section 2.3 we show numerical simulations of periodic solutions of leg when weconsider the space-clamped Hodgkin–Huxley equations to model the internal dynamics ofeach cell. Secondary gaits are obtained numerically by bifurcation from primary gaits. Ana-lytical results that support these findings are summarized in Section 2.4.
2.1. The Differential Equations Associated to leg
The class of differential equations corresponding to network leg is
�x1 � F�x1� x2� x3� x4�
�x2 � F�x2� x1� x4� x3�
�x3 � F�x3� x4� x1� x2�
�x4 � F�x4� x3� x2� x1� (2.1)
where xi � Rk is the cell i variables, k is the dimension of the internal dynamics for eachcell, and F : �Rk�4 � Rk is an arbitrary mapping.
The network leg consists of four cells, each one coupled to all other cells. The group ofsymmetries of leg is the four element group
�leg � Z2���� Z2��� (2.2)
where � � �1 2��3 4� switches muscle groups between legs, and � � �1 3��2 4� permutesmuscle groups within each leg.
2.2. Symmetries of Periodic Solutions in (2.1) and Bipedal Gaits
Let H and K be the subgroups of spatiotemporal and spatial symmetries of a general �-equivariant system. �H� K � correspond to symmetries of a periodic solution if they satisfyTheorem 2.1 in Pinto and Golubitsky (2005), see also Buono and Golubitsky (2001) andGolubitsky and Stewart (2002). We have 11 such pairs of subgroups, see Table 1.
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1490 C. M. A. PINTO
Table 1. Patterns of oscillation in leg. Let X �t� � �x1�t�� x2�t�� x3�t�� x4�t�� be a periodicsolution with period normalized to 1. The symmetry � swaps the signals sent to identicalmuscle groups of the two legs� the symmetry � swaps the two signals sent to musclegroups within each leg.
H K Left leg Right leg Name�leg �leg �x1�t�� x1�t�� �x1�t�� x1�t�� two-legged hop
�leg �� �x1�t�� x1�t � 12�� �x1�t � 1
2�� x1�t�� walk
�leg � �x1�t�� x1�t � 12�� �x1�t�� x1�t � 1
2�� two-legged jump
�leg � �x1�t�� x1�t�� �x1�t � 12�� x1�t � 1
2�� run
�� �� �x1�t�� x2�t�� �x2�t�� x1�t�� asymmetric hop
�� 1 �x1�t�� x2�t � 12�� �x2�t�� x1�t � 1
2��
� � �x1�t�� x2�t�� �x1�t�� x2�t��
� 1 �x1�t�� x2�t�� �x1�t � 12�� x2�t � 1
2�� skip
� � �x1�t�� x1�t�� �x2�t�� x2�t�� one-legged hop
� 1 �x1�t�� x1�t � 12�� �x2�t�� x2�t � 1
2�� gallop
1 1 �x1�t�� x2�t�� �x3�t�� x4�t��
We call gait types primary when H � �leg and secondary when H � Z2. The periodicsolution types associated to these symmetries are given in Table 1.
We associate the four primary gait types that are produced by the four-cell network legwith the bipedal gaits walk, run, two-legged hop, and two-legged jump. Four of the sixsecondary gait types are identified with the bipedal gaits skip, one-legged hop, asymmetrichop, and gallop. For more information see Pinto and Golubitsky (2005).
We explain briefly, as an example, how we identified two primary gaits with the bipedwalk and run, and two secondary gait types with the biped gallop and one-legged hop.
The bipedal gaits walk and run have the property that the left and right legs are a half-period out of phase. As discussed in Golubitsky et al. (1999) the flexor and extensor musclesof the ankle joint are in phase in the run and out of phase in the walk (Mann, 1982�Mann etal., 1986). Biomechanically the legs move like pendula in the walk and like a pogo stick inthe run. The differences between these gaits can be understood in terms of their respective�H� K � symmetry pairs. Indeed, in Table 1 the run is identified as the gait where the twosignals sent to one leg are in phase and the walk as the gait where the two signals sent to oneleg are a half-period out of phase.
The two gaits gallop (Whitall, 1989�Whitall and Caldwell, 1992� Caldwell and Whitall,1995� Peck and Turvey, 1997� Minetti, 1998) one-legged hop have a common property: theexistence of a lead leg in the gait cycle. The interlimb phasing of the gallop, measured as aportion of a limb cycle that has elapsed when the footstrike occurs on the contralateral limb,is approximately 0�66, as contrasted with 0�50 in the walk and run (Whitall, 1989� Caldwelland Whitall, 1995). The gallop is, like the skip, a prevalent gait in children’s games. It is alsocommonly used by Lemur (Jenkins, 1974) and by small birds (Hayes and Alexander, 1983)for ground locomotion.
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

NUMERICAL SIMULATIONS IN TWO CPG MODELS 1491
The fact that the bipedal gallop and the one-legged hop have lead legs (that is, the mo-tions of the two legs are different), suggests that the signals sent to the right and left legs aredifferent. In two of our secondary gait types, the pair of signals sent to the left leg is differentfrom the pair of signals sent to the right leg. For this reason we identify these periodic stateswith one-legged hop and gallop. These gaits differ from each other in that the two signalssent to one leg are either in phase or half-period out of phase.
2.3. Numerical Simulations
We show results of numerical simulations of CPG (2.1) using XPPAUT (Ermentrout,YEAR??). Internal cell dynamics is modeled by the space clamped Hodgkin–Huxley equa-tions Hodgkin and Huxley (1952). See also the Appendix. The coupling is synaptic and isonly through the voltage term.
We plot only the voltage variable from the signal of each cell, �i�t�, i � 1� 2� 3� 4. Cells1 and 3 send signals to the left leg, and cells 2 and 4 to the right leg.
The dynamics of the bipedal network is given by:
��i � f ��i � yi� I k1�i�2 k3�i�i k2�m
�yij �
�� j��i� yi
j
�� j��i� (2.3)
where the indices are taken modulo 4, yi � y��i�, i � �1�i�1, i � 1� 2, j � 1� 2� 3, andm � i � 3 if i � 1� 3, and m � i � i�1 if i � 2� 4.
In Tables 2–3 we show periodic solutions corresponding to the four primary gait typesand to the named secondary gait types. For values of the initial conditions, temperature,intensity of the external current stimulus, and coupling constants of the figures see Table 10in the Appendix.
2.4. Bifurcation and Stability of Gaits
In section 2.2 above we resume the identification of primary and secondary gaits using sym-metry results. In Pinto (2004) we use bifurcation theory to achieve the same goal. Primarygaits are obtained by bifurcation from a D2invariant equilibrium whereas secondary gaitsare obtained from symmetry-breaking bifurcations of primary gaits.
Primary gaits. We computed the bifurcations and stability of the four primary gaits, two-legged hop, walk, run, and two-legged jump, around an equilibrium X � �x� x� x� x�.
In order to study the bifurcation of gaits we needed to study the eigenvalues of thelinearization, L , at X . The fact that L has the nice property of commuting with the symmetrygroup �leg made this task easier. In the end we have block-diagonalized L in four distinctmatrices L�leg , L� , L� , and L�� . Generically Hopf bifurcation occurs for simple pairs ofpurely imaginary eigenvalues. Assuming this, we may compute Hopf bifurcation points foreach matrix L� , with � � �leg� �� � � �� �, and stability of the corresponding periodic orbits.Table 4 shows the correspondence between periodic solutions obtained from L� and primarybipedal gaits. For more information see Pinto (2004).
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1492 C. M. A. PINTO
Table 2. Bipedal primary gaits.
Secondary gaits. In horses, dogs, and cats, transitions from a trot to a transverse gallop areusually observed (Afelt et al., 1983� Farley and Taylor, 1991). Transitions in animal gaitscan be seen as symmetry-breaking bifurcations from one stable periodic solution to another.Secondary biped gaits are thus symmetry-breaking bifurcations of primary biped gaits.
In Pinto (2004) we use the Poincaré map to find the secondary biped gaits. The listof possible symmetry-breaking bifurcations from primary gaits is found in Tables 5–6. Allsecondary gaits are obtained from bifurcation of primary gaits.
Each bifurcation in listed in Table 5 can occur if the cell dynamics and coupling archi-tecture are general enough (Buono, 2001). For example, in the figures in Table 3, the gallopwas obtained by bifurcation from the two-legged jump. Numerically, we did the following.To obtain the gallop, we started with a stable periodic solution corresponding to the primarygait two-legged jump and decreased the value of the coupling constant k2 from k2 � 0�083in steps of 0�002. For each step we computed the solutions numerically for a time interval oft � 3� [0� 64], using as initial condition the value at t � 64 of the previous solution. In theinterval k2 � [0�091�0�085] there is a bifurcation value to a periodic solution identifiedwith the biped gallop.
Stability of gaits in section 2.3. The stability of the numerical solutions in section 2.3 arecomputed using the eigenvalues of matrices L�leg , L�� , L� , L� . For more information seePinto (2004) and Labouriau and Alves-Pinto (2004).
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

NUMERICAL SIMULATIONS IN TWO CPG MODELS 1493
Table 3. Named bipedal secondary gaits.
Table 4. Correspondence between periodic solutions of L� and primary gaits.
L� Primary gaitL�leg two-legged hopL� runL� two-legged jumpL�� walk
Table 5. Bifurcations from primary gaits: walk, run, and two-legged jump. Spatio-temp.sym are the spatio-temporal symmetries of solutions.
K Primary Gait Spatio-temp. sym. Secondary Gait Spatio-temp. sym.
�� walk �� � 12�� ��� 1
2� gallop �� � 12�
skip ��� 12�
� run �� � 0�� ��� 12� skip ��� 1
2�
���� 12�
� two-legged jump �� � 12�� ��� gallop �� � 1
2�
���� 12�
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1494 C. M. A. PINTO
Table 6. Symmetry-breaking bifurcations from the two-legged hop. �H� K � is the spatio-temporal symmetry pair of the solution. Compare with Table 1.
K � Secondary Gait �H� K �� ��� ��� one-legged hop �� � � ��� asymmetric hop ��� � ���
Let H be the matrix of the linearization of the uncoupled Hodgkin–Huxley equationsand let J � � jil�i�l be the matrix with only one nonzero entry j11 � 1. Matrices L� , with� � �leg� ��� �� � �, can be written in the form:
LD2 � H �k3 � k1 � k2�J
L� � H �k3 k1 k2�J
L� � H �k3 � k1 k2�J
L�� � H �k3 k1 � k2�J� (2.4)
Eigenvalues of H�ki�k j�kl�, i � j � l, are computed in Labouriau and Alves-Pinto(2004). This may be used to compute bifurcation into the four primary gaits. Moreover, two-legged jump appears when k � k1 k2 k3 crosses a bifurcation value. Analogously for theother primary gaits.
3. ARM/LEG COORDINATION: NETWORK arm
In this section we summarize results in Pinto and Golubitsky (2005) on network arm (Fig-ure 1 (right)). In Section 3.1 we introduce the differential equations and symmetries asso-ciated to quad and arm. In Section 3.2 we review the discussion of the leg/arm rhythmsassociated with perturbed quadruped gaits. In Section 3.3 we use XPPAUT (Ermentrout,YEAR??) to compute numerically some of the periodic solutions associated to arm.
3.1. The Differential Equations Associated to quad and arm
The class of systems of differential equations of the network that we have drawn in Figure 1,quad, is
�x1 � F�x1� x2� x7� �x5 � F�x5� x6� x3�
�x2 � F�x2� x1� x8� �x6 � F�x6� x5� x4�
�x3 � F�x3� x4� x1� �x7 � F�x7� x8� x5�
�x4 � F�x4� x3� x2� �x8 � F�x8� x7� x6� (3.1)
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

NUMERICAL SIMULATIONS IN TWO CPG MODELS 1495
where xi � Rk is the cell i variables, k is the dimension of the internal dynamics for eachcell, and F : �Rk�3 � Rk is an arbitrary mapping.
The symmetry breaking from quad to arm is made clear in Figure 1 (right) by the useof two types of symbols (circles and squares) to represent cells, and three types of arrows(representing the coupling between cells). This network is motivated by the fact that all fourlimbs strike the ground in quadrupeds (hence the similarity between arms and legs is strong),whereas only two limbs (the legs) strike the ground in bipeds (hence the similarity betweenlegs and arms is less strong). The class of ordinary differential equations (ODEs) associatedto arm is
�x1 � F1�x1� x2� x7� �x5 � F1�x5� x6� x3�
�x2 � F1�x2� x1� x8� �x6 � F1�x6� x5� x4�
�x3 � F2�x3� x4� x1� �x7 � F2�x7� x8� x5�
�x4 � F2�x4� x3� x2� �x8 � F2�x8� x7� x6� (3.2)
where F1 : �Rk�3 � Rk defines the dynamics corresponding to legs and F2 : �Rk�3 � Rk
defines the dynamics corresponding to arms. The assumption that the symmetry breakingfrom quad to arm is small implies that F1 � F2.
The group of symmetries of the network quad is the eight element group
�quad � Z4� �� Z2��� (3.3)
where � �1 3 5 7��2 4 6 8� and � � �1 2��3 4��5 6��7 8�. Every element in � movessolutions of (3.1) to solutions.
The symmetry group of arm is generated by 2 � �1 5��3 7��2 6��4 8� and � . Thesymmetry group is
�arm � Z2� 2�� Z���� (3.4)
Note that the symmetry groups �leg and �arm are isomorphic.
3.2. Rhythms Produced by ��� vs Biped Gaits
Let H and K be the symmetry groups of solutions of quad. Hyperbolicity implies thatperiodic solutions of quad perturb to periodic solutions of arm. The symmetry groups ofthese perturbed solutions are H � � H ��arm and K � � K ��arm. For more information seePinto and Golubitsky (2005).
In Table 3 in Pinto and Golubitsky (2005) we list the spatio-temporal symmetry types ofprimary and secondary quadrupedal gaits in quad computed in Golubitsky et al. (1998), andmatch the perturbed solutions with leg rhythms in bipeds. Finally, every symmetry type ofperiodic solution (corresponding to the biped gaits) in the four-cell biped model leg analyzedin Section 2.2 can be identified with a symmetry type corresponding to a gait in the arm. Theresults are summarized in Table 2 in Pinto and Golubitsky (2005). We reproduce it here, seeTable 7.
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

1496 C. M. A. PINTO
Table 7. Column 1 lists the primary and secondary gaits produced by quad. Column 2 liststhe associated rhythms of the hindlegs of these gaits, as they appear in leg. Column 3lists the leg/arm rhythms in arm of solutions corresponding to a small symmetry-breakingperturbation of a quadruped gait type solution.
quad leg armpronk two-legged hop two-legged hopbound two-legged hoppace runtrot run runjump two-legged jumpwalk walkrotary jump galloptransverse jump gallop gallopscuttle skiploping trot one-legged hoprotary gallop one-legged hoploping pace one-legged hoptransverse gallop one-legged hop
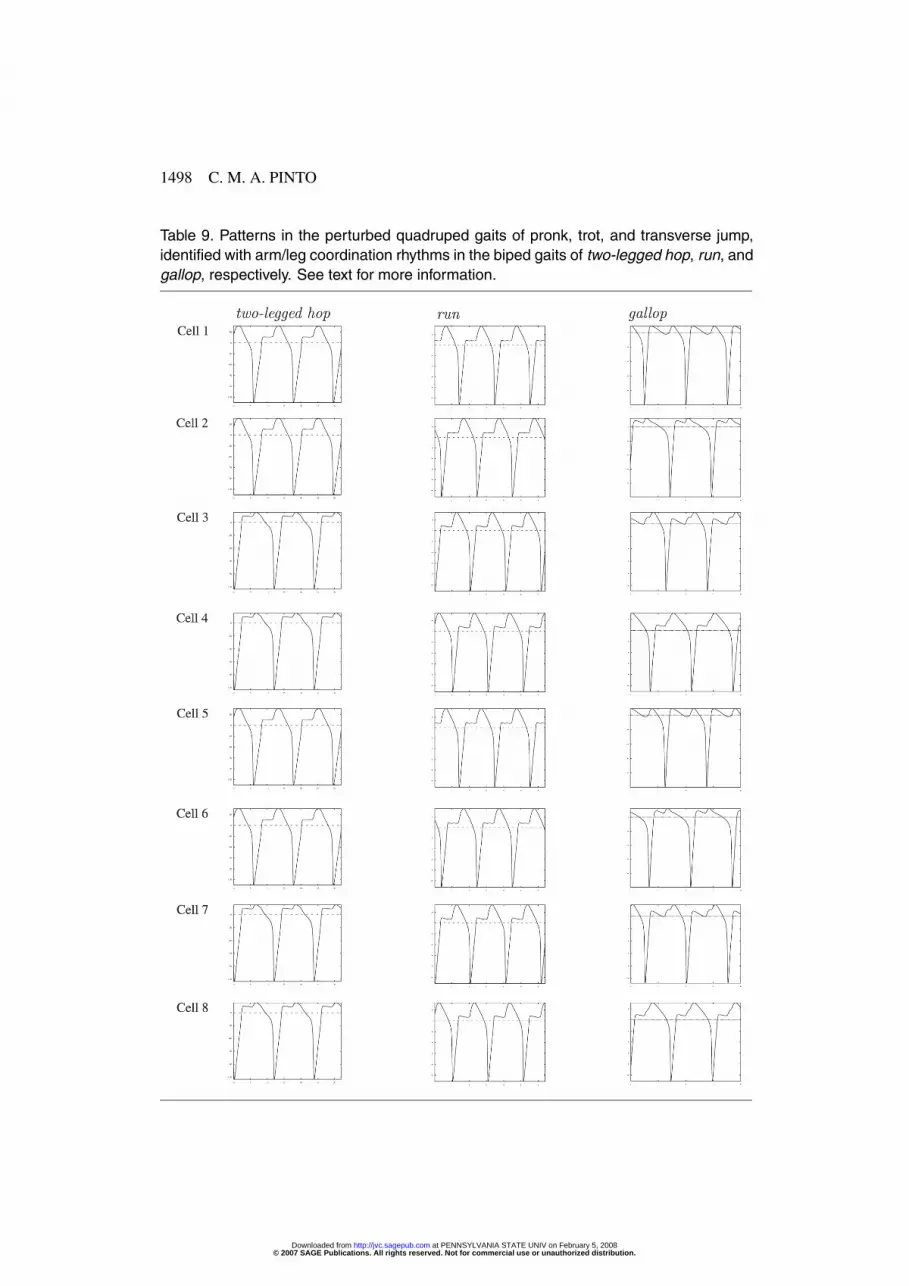
We proceed with a brief discussion of the perturbed quadruped gaits that can be identifiedwith arm/leg coodination patterns in bipeds. Moreover, the perturbed pronk is identified withthe two-legged hop, the perturbed trot with the run, and the perturbed transverse jump withthe gallop. As a remark, the biped walk cannot be thought of as a small perturbation of anystandard quadruped gait in quad. See Pinto and Golubitsky (2005) for more information.
Perturbed pronk. The pronk has symmetry pair �H� K � � ��quad� �quad�. After pertur-bation, the perturbed pronk has symmetry pair �H �� K �� � ��arm� �arm�. The pronk is aperiodic solution in which equal signals are sent to all muscles� the perturbed pronk is a peri-odic solution in which the muscles in both the legs and the arms receive the same signal, andthe signals sent to the arms are close to the signals sent to the legs. Thus, arms and legs movealmost synchronously and this is similar to the two-legged hop, see Figure 7 in Masoud andPapanikolopoulos (2003).
Perturbed trot. In the biped run (see Whitall, 1989, Figure 1) the two arms and the two legsare a half period out of phase and the diagonal limbs are approximately synchronous. Wehave discussed previously that the two signals sent to (the muscle groups of the ankle jointof) a leg are approximately in-phase.
In arm the perturbed trot has symmetry pair �H �� K �� � ��arm�Z2� 2��. In particular,
2 is a space symmetry so that the two signals sent to the same limb are synchronous. Since� is a spatiotemporal symmetry, the two arms and the two legs are a half period out of phase.Since the arm solution is a perturbation of a trot in quad, pairs of diagonal limbs should beapproximately synchronous. For these reasons we can identify a perturbed trot with a bipedrun.
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

NUMERICAL SIMULATIONS IN TWO CPG MODELS 1497
Table 8. Correspondence between cells and limbs in network arm.
armCells Limb1, 5 Left leg2, 6 Right Leg3, 7 Left Arm4, 8 Right Arm
Perturbed transverse jump. Both the rotary and the transverse jump perturb to a quadrupedgait where the legs have the rhythms of a gallop. However, only the perturbed transversejump produces periodic solutions with rhythms in interlimb coordination seen in the usualbiped gallop.
In the typical biped gallop (Whitall and Caldwell, 1992) the phases between the twoarms are similar to their feet phasing and the arms and legs on the same side are close tosynchrony. The two perturbed jumps, rotary and transverse, have an asymmetric arm patterndriven by leg phasing, nevertheless, only the later has arms and legs on the same side closeto synchrony. Whitall and Caldwell (1992) also observe that in the gallop there can be muchvariability in the phasing between arms and legs. Indeed, in many subjects, the two armsare a half-period out of phase� this symmetric arm pattern is not a small perturbation of anyquadruped gait.
3.3. Numerical Simulations
We show results of numerical simulations of CPG 3.2 using XPPAUT (Ermentrout, YEAR??).Internal cell dynamics is modeled by the space-clamped Hodgkin–Huxley (1952) equations.See also the Appendix. We plot only the voltage of each cell, �i�t�, i � 1� 2� 3� 4� 7� 8� 9.See Table 8 for the correspondence between cells and limbs in CPG arm.
The dynamics of the arm/leg coordination model is given by:
��i � f ��i � yi� I k2��i �i�i � K ��i �i�6�
�yij �
�� j��i� yi
j
�� j��i� (3.5)
where the indices i are taken modulo 8, i � �1�i�1, K � k1� i � 1� 2� 5� 6 and K � k3�i � 3� 4� 7� 8, j � 1� 2� 3, yi � y��i�, i � 1 � � � 8.
4. CONCLUSIONS
In Pinto and Golubitsky (2005) we discuss two CPG models, one for leg rhythms (leg) andone for arm/leg coordination in bipeds (arm). In this paper we explore numerically some ofthe solution properties of the two general CPG models for biped rhythms, leg and arm whenwe assume that the internal dynamics of each cell is modeled by a space-clamped Hodgkin–Huxley equation and the coupling is only through the voltage term. We review the results inPinto and Golubitsky (2005) and Pinto (2004) to set up the context.
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from
1498 C. M. A. PINTO
Table 9. Patterns in the perturbed quadruped gaits of pronk, trot, and transverse jump,identified with arm/leg coordination rhythms in the biped gaits of two-legged hop, run, andgallop, respectively. See text for more information.
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

NUMERICAL SIMULATIONS IN TWO CPG MODELS 1499
Primary gaits in leg bifurcate from an equilibrium, called the stand. Secondary gaitsare obtained by bifurcation of primary gaits, see Table 5 and Pinto (2004). Each bifurcationcan occur if the cell dynamics and coupling architecture are general enough, see Theorem 1(Buono, 2001).
In Buono (2001) secondary gaits could not be found in numerical simulations when thecells were coupled only through the voltage term. In order to obtain the secondary gaitsnumerically they considered an atypical coupling for equations modeling electrical activityof neurons, the all–to–all coupling. Cells were coupled through voltage and ion channelterms. They used Morris–Lecar equations to model cell dynamics.
Here we use a more typical type of coupling, we only couple the voltage term, and,though we could not build the bifurcation diagram using AUTO, we found the secondary gaitsin leg by varying, with fixed steps, a parameter of a primary gait solution until it reached abifurcation value. In particular, the gallop was obtained from the primary two-legged jump.
We show numerical simulations of periodic solutions of arm identified with arm/legcoordination in bipeds.
APPENDIX
Hodgkin–Huxley Equations
The space-clamped Hodgkin–Huxley (HH) equations are a 4� 4 system of nonlinear ODEsthat model electrical activity in the giant axon of a squid under certain controlled experimen-tal conditions.
The uncoupled system is given by:
d�
dt� f ��� y� I
dy j
dt�
�� j��� y j
�� j���
where � is the difference of electrical potential across each cell membrane, I is the intensityof an external current stimulus, and � 3
T6�310 � is the temperature compensating factor. The
function f is defined as
f ��� y� � gL�� VL� gNam3h�� VNa� gK n4�� VK ��
The functions � j��� and � j��� are given by
� j��� � � j���� � j��� � j��� �� j���
� j���� � j����
Each term gi�i�y��� Vi� models an ionic channel that regulates the voltage along themembrane of the axon. The variable y � �y1� y2� y3� and the functions �� with �1 � y3
1 y3��2 � y4
2 � are considered probabilities and, when all y j � [0� 1], they assume values in theinterval [0� 1].
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from
1500 C. M. A. PINTO
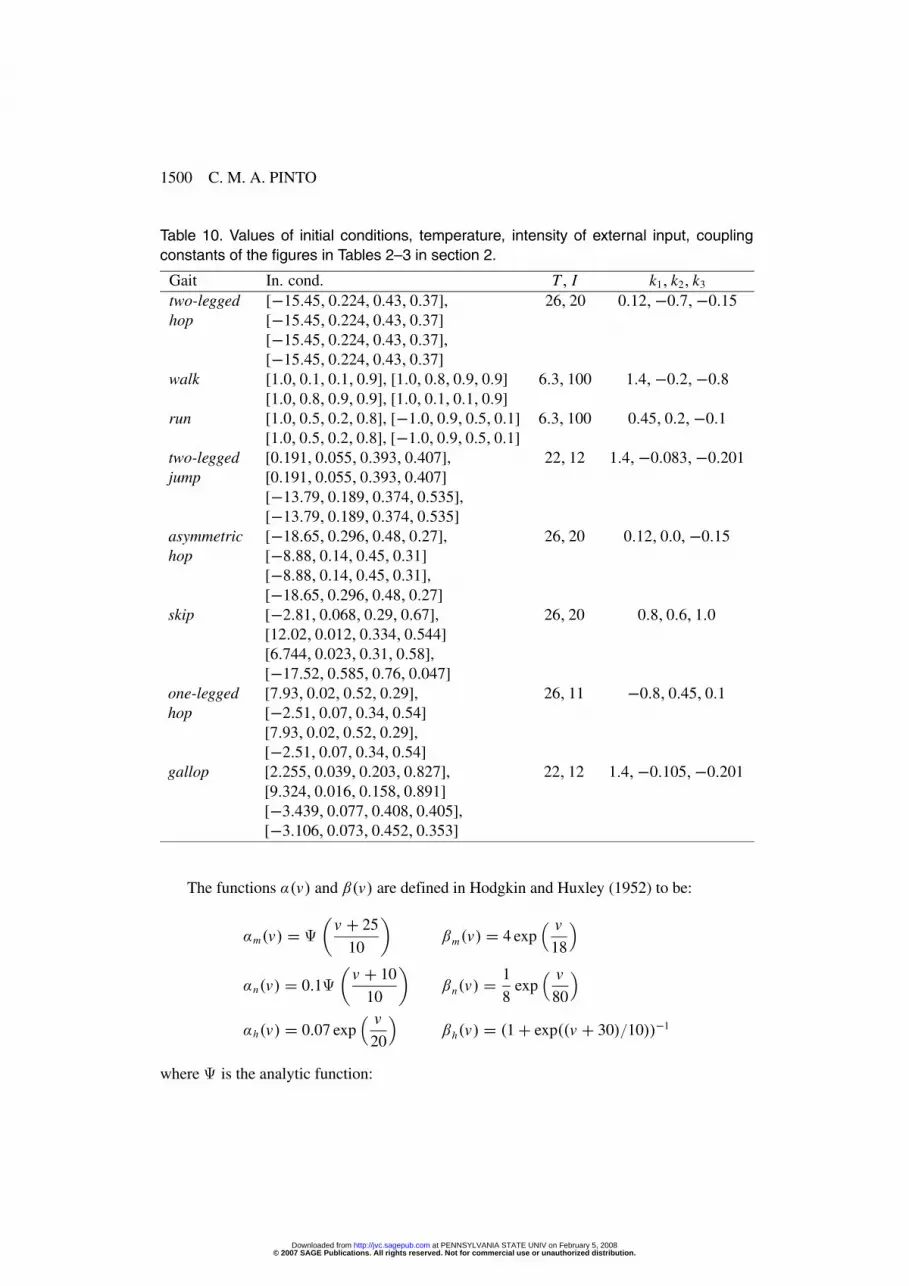
Table 10. Values of initial conditions, temperature, intensity of external input, couplingconstants of the figures in Tables 2–3 in section 2.
Gait In. cond. T� I k1� k2� k3
two-legged [15�45� 0�224� 0�43� 0�37], 26� 20 0�12�0�7�0�15hop [15�45� 0�224� 0�43� 0�37]
[15�45� 0�224� 0�43� 0�37],[15�45� 0�224� 0�43� 0�37]
walk [1�0� 0�1� 0�1� 0�9], [1�0� 0�8� 0�9� 0�9] 6�3� 100 1�4�0�2�0�8[1�0� 0�8� 0�9� 0�9], [1�0� 0�1� 0�1� 0�9]
run [1�0� 0�5� 0�2� 0�8], [1�0� 0�9� 0�5� 0�1] 6�3� 100 0�45� 0�2�0�1[1�0� 0�5� 0�2� 0�8], [1�0� 0�9� 0�5� 0�1]
two-legged [0�191� 0�055� 0�393� 0�407], 22� 12 1�4�0�083�0�201jump [0�191� 0�055� 0�393� 0�407]
[13�79� 0�189� 0�374� 0�535],[13�79� 0�189� 0�374� 0�535]
asymmetric [18�65� 0�296� 0�48� 0�27], 26� 20 0�12� 0�0�0�15hop [8�88� 0�14� 0�45� 0�31]
[8�88� 0�14� 0�45� 0�31],[18�65� 0�296� 0�48� 0�27]
skip [2�81� 0�068� 0�29� 0�67], 26� 20 0�8� 0�6� 1�0[12�02� 0�012� 0�334� 0�544][6�744� 0�023� 0�31� 0�58],[17�52� 0�585� 0�76� 0�047]
one-legged [7�93� 0�02� 0�52� 0�29], 26� 11 0�8� 0�45� 0�1hop [2�51� 0�07� 0�34� 0�54]
[7�93� 0�02� 0�52� 0�29],[2�51� 0�07� 0�34� 0�54]
gallop [2�255� 0�039� 0�203� 0�827], 22� 12 1�4�0�105�0�201[9�324� 0�016� 0�158� 0�891][3�439� 0�077� 0�408� 0�405],[3�106� 0�073� 0�452� 0�353]
The functions ���� and ���� are defined in Hodgkin and Huxley (1952) to be:
�m��� � ��� � 25
10
��m��� � 4 exp
� �18
�
�n��� � 0�1�
�� � 10
10
��n��� � 1
8exp
� �80
�
�h��� � 0�07 exp� �
20
��h��� � �1� exp��� � 30��10��1
where � is the analytic function:
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from
NUMERICAL SIMULATIONS IN TWO CPG MODELS 1501
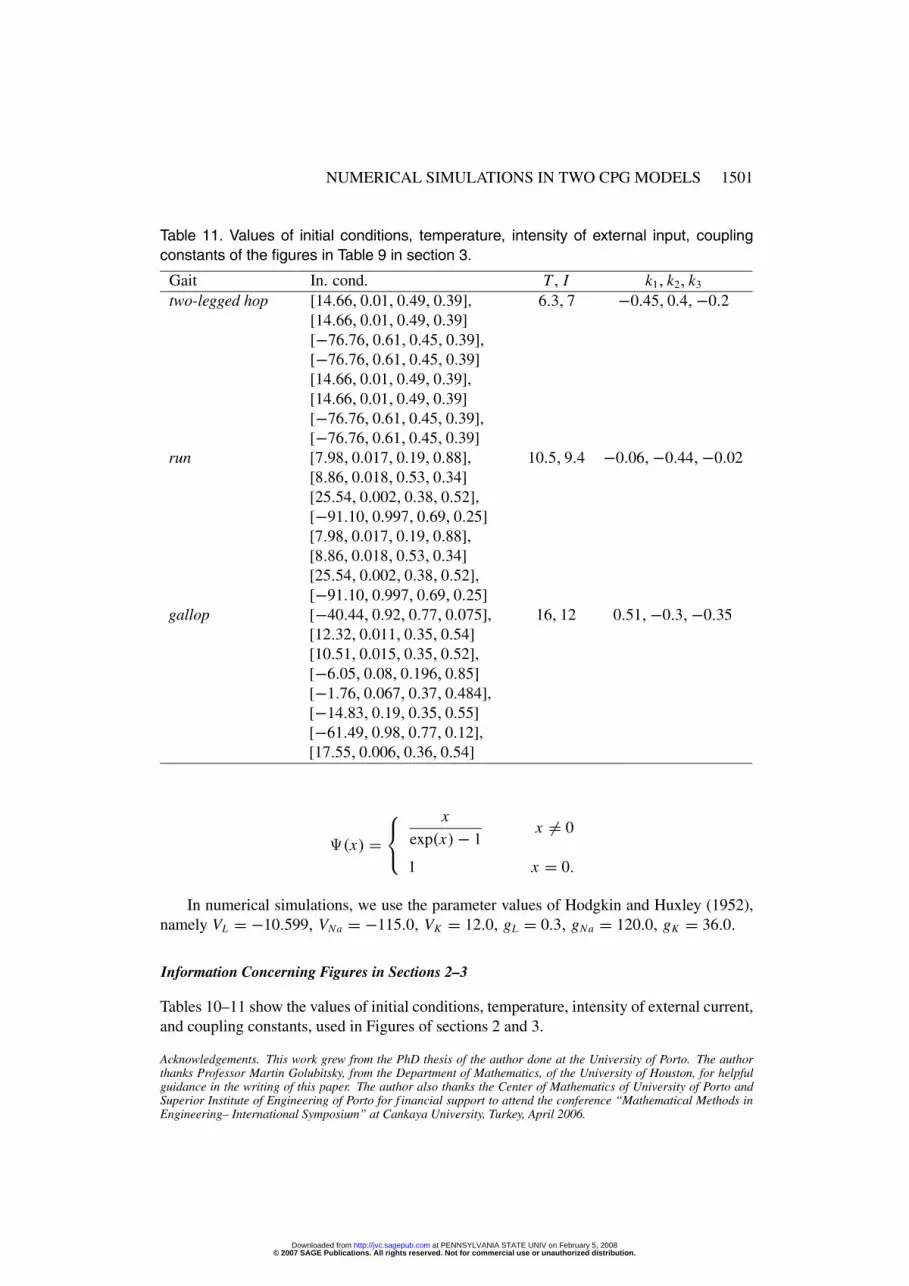
Table 11. Values of initial conditions, temperature, intensity of external input, couplingconstants of the figures in Table 9 in section 3.
Gait In. cond. T� I k1� k2� k3
two-legged hop [14�66� 0�01� 0�49� 0�39], 6�3� 7 0�45� 0�4�0�2[14�66� 0�01� 0�49� 0�39][76�76� 0�61� 0�45� 0�39],[76�76� 0�61� 0�45� 0�39][14�66� 0�01� 0�49� 0�39],[14�66� 0�01� 0�49� 0�39][76�76� 0�61� 0�45� 0�39],[76�76� 0�61� 0�45� 0�39]
run [7�98� 0�017� 0�19� 0�88], 10�5� 9�4 0�06�0�44�0�02[8�86� 0�018� 0�53� 0�34][25�54� 0�002� 0�38� 0�52],[91�10� 0�997� 0�69� 0�25][7�98� 0�017� 0�19� 0�88],[8�86� 0�018� 0�53� 0�34][25�54� 0�002� 0�38� 0�52],[91�10� 0�997� 0�69� 0�25]
gallop [40�44� 0�92� 0�77� 0�075], 16� 12 0�51�0�3�0�35[12�32� 0�011� 0�35� 0�54][10�51� 0�015� 0�35� 0�52],[6�05� 0�08� 0�196� 0�85][1�76� 0�067� 0�37� 0�484],[14�83� 0�19� 0�35� 0�55][61�49� 0�98� 0�77� 0�12],[17�55� 0�006� 0�36� 0�54]
��x� ���
x
exp�x� 1x � 0
1 x � 0�
In numerical simulations, we use the parameter values of Hodgkin and Huxley (1952),namely VL � 10�599� VNa � 115�0� VK � 12�0� gL � 0�3� gNa � 120�0� gK � 36�0�
Information Concerning Figures in Sections 2–3
Tables 10–11 show the values of initial conditions, temperature, intensity of external current,and coupling constants, used in Figures of sections 2 and 3.
Acknowledgements. This work grew from the PhD thesis of the author done at the University of Porto. The authorthanks Professor Martin Golubitsky, from the Department of Mathematics, of the University of Houston, for helpfulguidance in the writing of this paper. The author also thanks the Center of Mathematics of University of Porto andSuperior Institute of Engineering of Porto for f inancial support to attend the conference “Mathematical Methods inEngineering– International Symposium” at Cankaya University, Turkey, April 2006.
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from
1502 C. M. A. PINTO
REFERENCES
Afelt, Z., Blasczcyk, J., and Dobrzecka, C., 1983, “Speed control in animal locomotion: transitions between sym-metrical and non-symmetrical gaits in dog,” Acta Neurobiologiae Experimentalis 43, 235–250.
Buono, P. L., 2001, “Models of central pattern generators for quadruped locomotion II. Secondary gaits,” Journalof Mathematical Biology 42(4), 327–346.
Buono, P. L. and Golubitsky, M., 2001, “Models of central pattern generators for quadruped locomotion I. Primarygaits,” Journal of Mathematical Biology 42, 291–326.
Bussel, B., Roby-Brami, A., Neris, O. R., and Yakovleff, A., 1996, “Evidence for a spinal stepping generator inman. Electrophysiological study,” Acta Neurobiologiae Experimentalis 56(1), 465–468.
Calancie, G. E., Needham-Shropshire, B., Jacobs, P., Willer, K., Zych, G., and Green, B. A., 1994, “Involuntarystepping after chronic spinal injury. Evidence for a central pattern generator for locomotion in man,” Brain117(5), 1143–1159.
Caldwell, G. E. and Whitall, J., 1995, “An energetic comparison of symmetrical and asymmetrical human gait,”Journal of Motor Behavior 27, 139–154.
Cohen, A. H., Holmes, P. J., and Rand, R. H., 1982, “The nature of the coupling between segmental oscillatorsof the lamprey spinal generator for locomotion: a mathematical model,” Journal of Mathematical Biology13(3), 345–369.
Cohen, A. H., Ermentrout, G. B., Kiemel, T., Kopell, N., Sigvardt, K. A., and Williams, T. L., 1992, “Modellingof intersegmental coordination in the lamprey central pattern generator for locomotion,” Trends in Neuro-science 15(11), 434–438.
Dimitijevic, M. R., Gerasimenko, Y., and Pinter, M. M., 1998, “Evidence for a spinal central pattern generator inhumans,” Annals of New York Academy of Science 800, 360–376.
Duysens, J. and Van de Crommert, H. W. A. A., 1998, “Neural control of locomotion: Part 1: The central patterngenerator from cats to humans,” Gait and Posture 7, 131–141.
English, A. W., 1979, “Interlimb coordination during stepping in the cat: an electromyographic analysis,” Journalof Neurophysiology 42(1), 229–243.
Ermentrout, B., 2002, XPPAUT. Toolkit to solve differential equations. Available at http://www.math.pitt.edu/bard/xpp/xpp.html.
Farley, C. T. and Taylor, C. R., “A mechanical trigger for the trot–gallop transition in horses,” Science 253, 306–308.Golubitsky, M, Stewart, I., Buono, P. L., and Collins, J. J., 1998, “A modular network for legged locomotion,”
Physica D 115, 56–72.Golubitsky, M., Stewart, I., Buono, P. L., and Collins, J. J., 1999, “Symmetry in locomotor central pattern generators
and animal gaits,” Nature 401, 693–695.Golubitsky, M. and Stewart, I., 2002, The Symmetry Perspective, Progress in Mathematics 200, Birkhauser, Basel.Grillner, S., Buchanan, J. T., Walker, P., and Brodin, L., 1988, “Neural control of locomotion in lower vertebrates,”
in Neural Control of Rhythmic Movements in Vertebrates, Wiley, New York, pp. 1–40.Hayes, G. and Alexander, R. McN., 1983, “The hopping gait of crows (Crovidae) and other bipeds,” Journal of
Zoology 200, 205–213.Hiebert, G. W., Whelan, P. J., Prochazka, A., and Pearson, K. G., 1996, “Contribution of hind limb flexor muscle
afferents to the timing of phase transitions in the cat step cycle,” Journal of Neurophysiology 75(3), 1126–1137.
Hodgkin, A. L. and Huxley, A. F., 1952, “A quantitative description of membrane current and its application toconduction and excitation in nerve,” Journal of Physiology 117, 500–544. Reproduced in Bulletin of Math-ematical Biology 52, 25–71 (1990).
Jenkins, F., 1974, Primate Locomotion, Academic Press, New York.Labouriau, I. S. and Alves-Pinto, C., 2004, “Loss of synchronization in partially coupled Hodgkin–Huxley equa-
tions,” Bulletin of Mathematical Biology 66(3), 539–557.Mann, R. A., 1982, “Biomechanics,” in Disorders of the Foot M. H., Jahss, ed., W.B. Saunders, PA, pp. 37–67.Mann, R. A., Moran, G. T., and Dougherty, S. E., 1986, “Comparative electromyography of the lower extremity in
jogging, running and sprinting,” American Journal of Sports Medicine 14, 501–510.Masoud, O. and Papanikolopoulos, N., 2003, “A method for human action recognition,” Image and Vision Comput-
ing 21(8), 729–743.
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from

NUMERICAL SIMULATIONS IN TWO CPG MODELS 1503
Minetti, A. E., 1998, “The biomechanics of skipping gaits: a third locomotion paradigm?,” Proceedings of the RoyalSociety, London B. 265, 1227–1235.
Pearson, K. G., 1993, “Common principles of motor control in vertebrates and invertebrates,” Annual Review ofNeuroscience 16, 265–297.
Peck, A. J. and Turvey, M. T., 1997, “Coordination dynamics of the bipedal galloping pattern,” Journal of MotorBehavior 29 No 4 (1997) 311–325.
Pinto, C. M. A., 2004, “Coupled oscillators,” PhD Thesis, University of Porto, Porto, Portugal.Pinto, C. M. A. and Golubitsky, M., 2006, “Central pattern generators for bipedal locomotion,” Journal of Mathe-
matical Biology 53, 474–489.Whitall, J., 1989, “A developmental study of the interlimb coordination in running and galloping,” Journal of Motor
Behavior 21, 409–428.Whitall, J. and Caldwell, G. E., 1992, “Coordination of symmetrical and asymmetrical human gait,” Journal of
Motor Behavior 24(4), 339–353.
© 2007 SAGE Publications. All rights reserved. Not for commercial use or unauthorized distribution. at PENNSYLVANIA STATE UNIV on February 5, 2008 http://jvc.sagepub.comDownloaded from





























