Embed Size (px)
Citation preview









Al-Haram Virtual Environment for Training
and Tour Purposes
Setyawan Widyarto, Muhammad Shafie Abdul Latiff
Faculty of Computer Science and Information SystemUniversiti Teknologi Malaysia
81310 UTM SkudaiJohor, Malaysia
swidyarto at siswa.utm.my, shafie at fsksm.utm.my
Abstract This paper will show Thawaf environment, one of theHajj events, from virtual reality perspective and will not presentany ritual discussion to avoid any reluctance or antipathy. Some-how, the environment may help people interested in virtual tourthe environment but have no opportunity to go wherein due toany limitations or forbiddances. The paper discloses the steps ofbuilding the model and reports the application for training priorfirst hand experience and for briefing any possible emergency ad-vent.
1 Introduction
Each year about two million Hajj pilgrims from every corner of the worldperform Hajj. The completed statistical data is available from [1]. Theypresent with limited experiences but have same missions to comply allHajj sequential steps requirements. The vast number of attendance andthe profound spiritual aspect of Hajj require the high knowledge of ritualprocedures and details of the Hajj environment. However, most of themare first time comer as Hajj is once-only compulsory deed within wholeMoslem life. Therefore, it is very beneficial for them if they are priorytrained using virtual environment of hajj real world. Especially, some ofHajj events that attribute safety concerns regarding crowd features. Oneof that Hajj events is Kaabah circumbulation, which is called Thawaf.
On the other hand, the project may fulfil the keenness of many peoplewho are not allowed to visit surrounding Al-Haram, Mecca. Hopefully,this project will bridge any existing prejudice due to lack of knowledgeabout the most populated events in Islamic life. The project may helppeople who are interested in virtual tour of the environment but have noopportunity to go wherein due to any limitations or any other reasons.
This paper discusses a project, which uses the principles of virtual en-vironments, about proposal of the Thawaf virtual environments in whichpilgrims may under a training preparation. The development of the Vir-tual Hajj Environments [VHE] will be used for training purposes of hajj

Setyawan Widyarto, Muhammad Shafie Abdul Latiff
pilgrim candidates and will lead to Virtual Hajj technology such as navi-gation engine.
The basis of the VHE is a faithful creation of the creation of theSacred Mosque, Masjidil Haram in which the pilgrims perform Thawaf(circumbulating the Kaabah). Using VHE, rather than being restricted topassive watching hajj video or listening hajj tutorial explanation, enablesthe users to perform a variety of tasks in hajj like ways and to reduce therisk of fatal accident in the crowd.
The VHE is digital simulation of real hajj environments in whichusers are able to participate. Participation and the way simulated arethe key components which make the environment virtual, and it is gen-erally agreed that such participation enables the users to feel that theyare present within the environment and are able to interact with thesimulation by navigating and moving within the scene. The VHE canbring simulation-based training environments closer to real-Hajj experi-ence. Rather than watch the simulated world through a desktop window,Hajj candidates are immersed in a 3D computer simulation of their workenvironment, where they can improve their skills through practice on nav-igation tasks.
2 Involved technologies
The technology used to explore digital, 3-D worlds does not include realtime implementation. The development of the VHE has intentionally usedabundant hardware and software. Therefore, the most common virtualreality systems and their associated interface devices, like ordinary mouse,will enable to control and manipulate the virtual world.
2.1 VRML software
Virtual Reality Modelling Language (VRML) is a standard file format fordescribing interactive 3D objects and worlds [8]. VRML is a means ofcreating and viewing three dimensional models which are accessible overthe Internet, using a standard web browser and a special VRML plug in.
The research used the V-Realm Builder version 2.0, Integrated DataSystems Inc, for development. The 3D model Cortona R© VRML Client5.0, a web browser plug-in, by Parallel Graphics, was used for viewing.Various ways were applied for rendering and navigating. The project usedcombination of 3 (major) ways for producing VRML. These ways includessupporting Modellers, coding VRML by hand, and using filter or convertertransform other 3D Formats into VRML.
2.2 Real world data
Real world data that are used in the project include data for building theenvironment model such as satellite images [Figure 1], maps or any other
18

Al-Haram Virtual Environment for Training and TourPurposes
representation of lay out. From this image, a top view of the real worldcan be drawn based on the satellite image.
Figure 1: Satelite Image of Al-Haram
Basically, any relevant real world visualisation can be used to buildthe VHE. The data are collected from many sources and in many formats.However, it must be able to recognise and identify real objects. This datacould be recorded movies from Closed Circuit Television [CCTV], fromany video cameras, and pictures/photos. From this data will be simplifiedto get nodes [e.g. walls, gates, lanes]. The data used are purposely soughtfrom Internet that are available and open for public.
2.3 Image Processing Techniques
Image measurements. A measurement used to measure points, lines, andareas on an image by manually drawing on an image layer within imageprocessing software. Common techniques, e.g. cropping and zooming inthe images [Figure 2], and are used before the images being analysed.
Figure 2: Satelite Image of Al-Haram
19

Setyawan Widyarto, Muhammad Shafie Abdul Latiff
Image Analysis. The acquisition of numerical information regardingselected image features, such as areas, perimeters, distances, etc. Figure3 is an example of extracting numerical information regarding a layout ofthe real world.
Figure 3: Extract Layout Dimension
2.4 The Environment Structure and Functionality
Understanding the components and their relationship of a VE could bedescribed in many ways. However, three components could be centralisedto all 3D virtual reality systems, i.e. imagery, interaction and behaviour[2] and [10]. The project identified that a VE consists of objects, interac-tion [including navigation and exploration], point light-view, and imagery[including topography]. These four building blocks are not processed inany fixed sequence and will be extended in discussion, section 3. The fol-lowing paragraphs contain references of virtual environment for trainingpurposes. Whereas, the orientation of environment structure and func-tionality in our project is for training and tour purposes.
Park et.al. [3] have developed a training system based on immer-sive virtual reality and automatic speech recognition technology. Weisset.al. [4] studied the suitability and feasibility of using a PC-based, non-immersive VR system, in which the user has a reduced sense of actualpresence in and control over the simulated environment, for training indi-viduals with unilateral spatial neglect to cross streets in a safe and vigilantmanner.
In large scale environment, spatial skills are targeted during train-ing. Witmer et al.[6] demonstrated that spatial skills learned in a virtualenvironment can transfer to real-world settings the virtual environmentadequately in condition represents important land-marks and cues. Inrespect of advanced spatial skills, Waller et al. [5] differentiate them into
20

Al-Haram Virtual Environment for Training and TourPurposes
two fundamental components: Interface fidelity which involves the controlmechanisms of navigation and environmental fidelity which involves thestimulus itself.
However, it is unclear how much or exactly adequate for trainee tograsp spatial skills. We do not know what would be important, for ex-ample, in a visually cluttered environment. Therefore, the project doesnot only include all interested in the interface, but also the environmentand the interaction between the two with the end result being the desiredtraining effect. The project is aimed to achieve training transfer with’adequate’ virtual environment structure and functionality.
3 Discussions
Virtual reality is also known by various terms: virtual environments [9],artificial reality [2], [11], spatial immersion [12]. It would seem that eachresearcher represent their own views of virtual reality. Therefore, it isclearly confirmed that there are differences between physical, virtual en-vironment and virtual reality. This paper may simply define VEs as arepresentation of actual world in three dimensional graphical world anduses Virtual Environment instead of Virtual Reality.
3.1 Method
Abid S. Hussain started modelling the 3D Kabah, in 1998 that was createdpredominantly from photos and freely available resources. The model ismore aesthetically accurate, than actually physically accurate. However,this is an interesting resource which provides users with an opportunity toenjoy a three-dimensional view of the Kabah. In his website, there are anumber of attractive pictures and downloadable videos that allow the holymosque in Makkah to be viewed from unique perspectives. The differencefrom Hussain’s 3D Kabah model is that the model in Truespace 6.0 +format, whilst our model uses Native VRML Editors, V-Realm Builder.Native VRML editors use VRML as their native format.
An overview of the method used for creating the 3D VRML is givenas shown in Figure 4. The virtual environment is developed without anyprior CAD files as no engineering drawing is available for public. In fact,Al-Haram is not freely accessed for everybody. Therefore, capturing theHajj environment is not based on the engineering drawing. Consequently,its accuracy of the VEs dimensions would not be a target. Somehow, itsaccuracy is approached through repeated comparisons between the virtualmodel and real one.
The VHE [Virtual Hajj Environments] built is mainly aimed to be aninteractive interface and towards an analysing simulation tool of crowd.The main feature of the VHE is that enabling users to gain access to areas
21

Setyawan Widyarto, Muhammad Shafie Abdul Latiff
Figure 4: Virtual World Construction Steps
or regions of the environment or allowing users to travel or in anotherword, to navigate.
Tracking and mapping of digitized surfaces such as satellite imagescaptured the real world. Other alternative data, such as existing map orlay out, photograph pictures, accompanied to back up when required dataare not available. A synthetic construction is sometimes applied to guessa position or a point’s coordinate.
The modelling of the environment could be simplified from images ofthe real world. Some constructing fine details and preserving the visibledetail of the real-world images were needed in relation with generatingspecific nodes. The virtual model is supplied with rendering but textur-ing is limited to some planes which are constructed by connecticng lines.Whereas, the lines come from the simplified points.
There are three main navigation modes that Cortona VRML andRealm Builder and they provide user controller as shown in Figure 5 and6 consecutively, i.e.: WALK, EXAMINE, and FLY. Users can switch thenavigation mode by clicking buttons on the vertical toolbar (click STUDYto enter EXAMINE mode). Each navigation mode may have several op-tions: PLAN, PAN, TURN, and ROLL. The combination of navigationmode and its option determines the possible camera motion and its orien-tation. Please note that the VRML author has an opportunity to specifywhich navigation paradigm should be used in the scene by default. Someworlds do not allow the user to use navigation controls, but they mayprovide on-screen cues to navigation. In VR and other 3D interactiveapplications, we may need the same travel methods as we do in real life,along with additional methods that do not exist in the physical world,but to allow easier access.
After we built VR world, the MATLAB interface can be used to createa VR world object. Commands can be entered directly in the MATLABCommand Window or use M-files to control virtual worlds. The belowprocedure uses the virtual world Alharam.wrl:
myworld=vrworld(’Alharam.wrl’);open(myworld);set(myworld,’Description’,’Al-Haram Virtual Environment for Training and Tour Purposes’);view(myworld);
To start building a picture of how virtual objects are created, they
22

Al-Haram Virtual Environment for Training and TourPurposes
Figure 5: User Controller in Web Browser
Figure 6: User Controller in Matlab Interface
23
Setyawan Widyarto, Muhammad Shafie Abdul Latiff
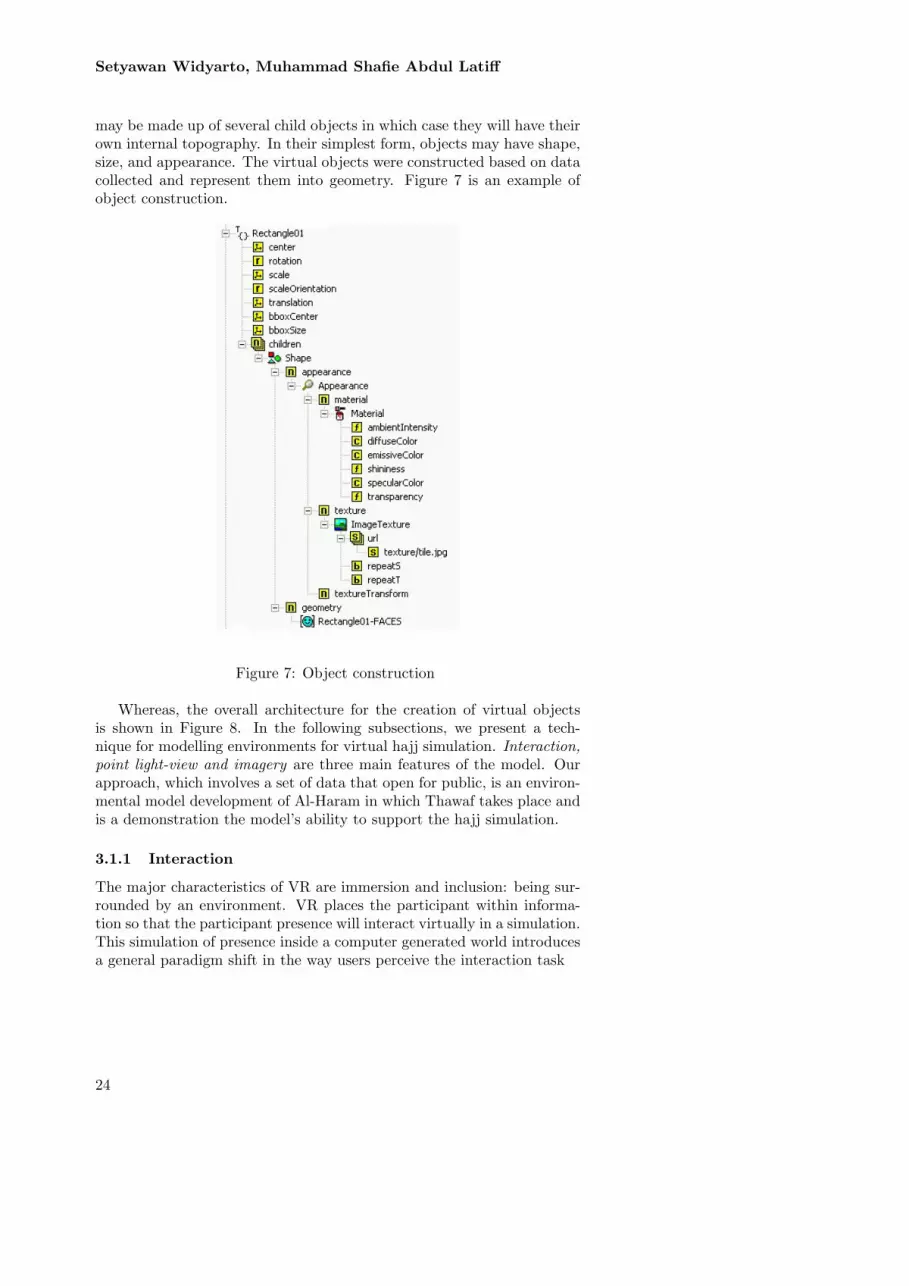
may be made up of several child objects in which case they will have theirown internal topography. In their simplest form, objects may have shape,size, and appearance. The virtual objects were constructed based on datacollected and represent them into geometry. Figure 7 is an example ofobject construction.
Figure 7: Object construction
Whereas, the overall architecture for the creation of virtual objectsis shown in Figure 8. In the following subsections, we present a tech-nique for modelling environments for virtual hajj simulation. Interaction,point light-view and imagery are three main features of the model. Ourapproach, which involves a set of data that open for public, is an environ-mental model development of Al-Haram in which Thawaf takes place andis a demonstration the model’s ability to support the hajj simulation.
3.1.1 Interaction
The major characteristics of VR are immersion and inclusion: being sur-rounded by an environment. VR places the participant within informa-tion so that the participant presence will interact virtually in a simulation.This simulation of presence inside a computer generated world introducesa general paradigm shift in the way users perceive the interaction task
24

Al-Haram Virtual Environment for Training and TourPurposes
Figure 8: The architecture for creating an object in VR
with the machine. Every human-machine/computer interaction task isa bi-directional communication between a user and the machine or thecomputer. The user specifies input and the computer responds to it byupdating its output.
Input is specified by the users or given by the author while outputconsists of updating a display as responses of output. VR, which assumesthe fact that human beings are well equipped to interact with 3D worlds,wants to make users interact with virtual worlds in the same way theyinteract with real worlds. Thus, making the interaction task will makethe VHE much more natural and reduce training numbers. Observing theway users interact with the real world, it is possible to identify the newinput and output channels required to simulate immersion.
3.1.2 Point light-view
Some of the objects may have dynamic or transient characteristics, whichcan be described as behaviours. Whilst a VE can exist without any view-points, these have to be set up so that a user can experience the VE. Thespecifics of the VE being developed will largely determine the order inwhich the work is done, but it is common for the process to involve fre-quently switching between object, topography, behaviours and viewpointcreation.
When creating virtual worlds, some pre-defined positions were createdby the author of a world. These positions are very useful as viewers. AViewer is the viewpoint from which scenes are viewed. As a user walkaround a world, the perspective from which the user sees images is theview port of a camera. It is as if the user walked around looking throughthe lens. One of the most powerful tools available in the V-Realm Builderis the ability to add positions to a defined list of positions that the usercan simply go. These features can be very powerful in defining tours ofworlds or even to highlight points of particular interest.
25

Setyawan Widyarto, Muhammad Shafie Abdul Latiff
3.1.3 Imagery [including topography]
Here, the term topography is used to refer all aspects of the layout of theVE. The objects within the layout are made up of the combinations ofshapes, colours and textures.
3.2 Representing and Modelling Thawaf Environments
Modelling could be the most time consuming and challenging aspectspecifically in developing Virtual Environments. Therefore, detail andperformance of the environment must be optimally balanced based onour target platform. The VHE must describe objects that involve in themodel represented. VRML uses the world coordinate system in which they-axis points upward and the z-axis places objects nearer or farther fromthe front of the screen. It is important to realize this fact in situationsinvolving the interaction of these different coordinate systems [Figure 9].
Figure 9: Coordinates system agreement
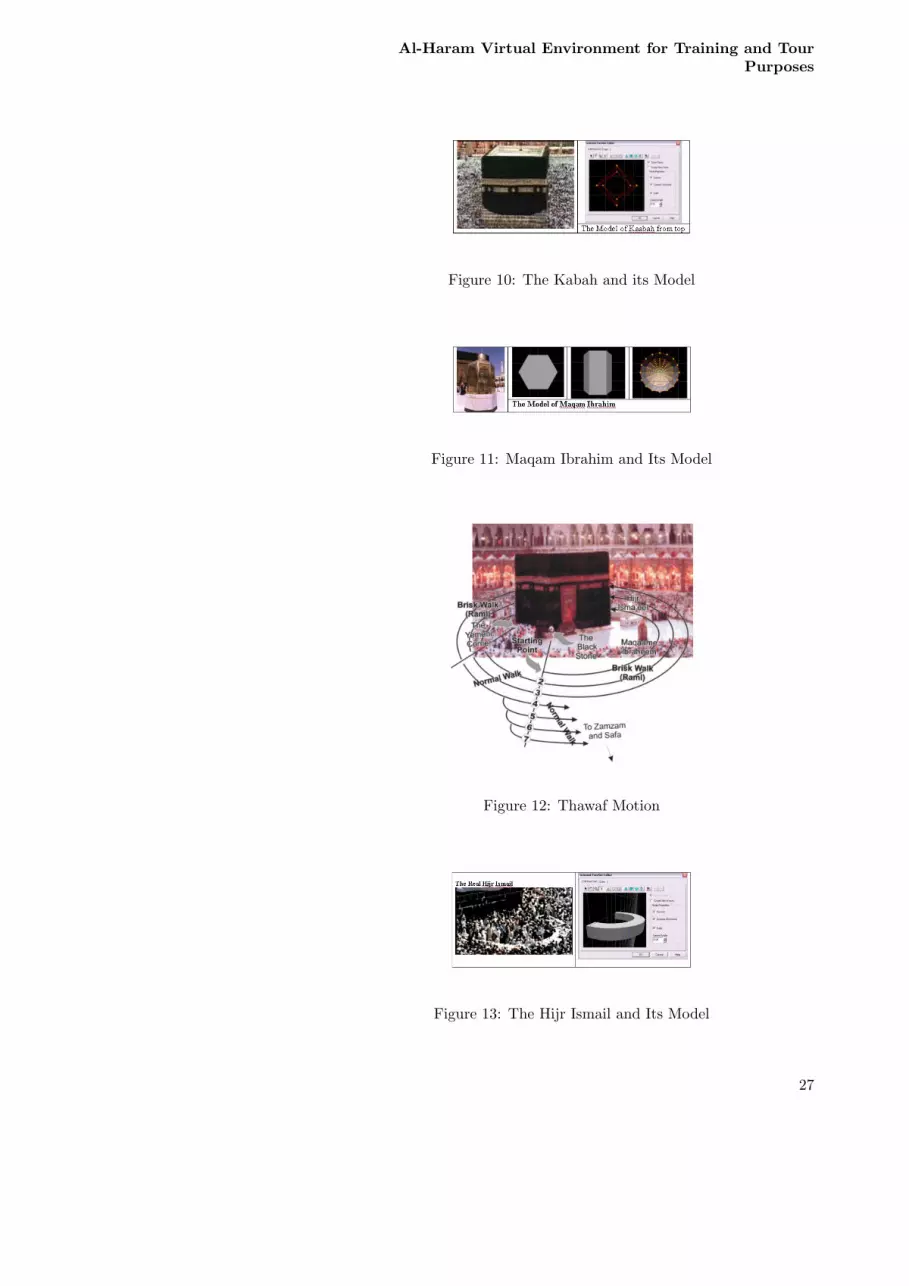
Thawaf begins and ends at Hajr-al-Aswad [The Black Stone] and be-tween Kaabah [Figure 10)] and Maqam Ibrahim [Figure 11] a.s. Thawafproceeds in an anti-clockwise direction [Figure 12]. To reach the start-ing point of Thawaf is not suggested to walk clockwise. If any agentsmove clockwise they will cause a lot of nuisance to crowd performing theThawaf. Pilgrims walk anti-clockwise from initial position to reach thestarting line of the Thawaf. This will ensure smooth movement of Thawaffor agents. After finishing Thawaf, pilgrims again are not recommendedto walk clockwise to exit. They need to continue walking anti-clockwiseuntil reaching desired area and exit there. However, some of pilgrims willdo some additional motion. These additional motions will interfere themacro-motion. They are approaching [Istilam/Kissing] Hajr Aswad [theBlack Stone], approaching or touching Yamani Corner [Rukun Yamani]or praying within space between Kabah and Hijr Ismail [Figure 13].
The edge of Al-Haram is created according to satellite [Figure 14] im-age and the dimension was not validated with real Al-Haram dimension.However, the comparison between them has indicated the similarity [Fig-ure 15]. The group of three objects [Figure 16] Kabah, Maqam Ibrahim,and Hijr Ismail are main objects of Al-Haram and layout of them arecreated as similar as possible with real world.
26
Al-Haram Virtual Environment for Training and TourPurposes
Figure 10: The Kabah and its Model
Figure 11: Maqam Ibrahim and Its Model
Figure 12: Thawaf Motion
Figure 13: The Hijr Ismail and Its Model
27

Setyawan Widyarto, Muhammad Shafie Abdul Latiff
Figure 14: Al-Haram Base Model
Figure 15: Al-Haram Reald World and Its Virtual
Figure 16: Main part of the Al-Haram
28

Al-Haram Virtual Environment for Training and TourPurposes
Moreover, the overall model virtual objects of Al-Haram [Figure 17]are created with the help of pictures, photos, and any public open sourcesin the Internet. For example, minareths [Figure 18] are best modelledaccording to the photos instead of top view as satellite images. It isalso acknowledged that library objects from private sources are also used.However, validation between the virtual model and real world is not con-ducted. The validation is limited to comparison with available documen-tation including videos.
Figure 17: Al-Haram Model
Figure 18: The Model of Minareth
3.3 The Virtual Hajj Environments for Training andReal World Acquaintance
The virtual reality program will allow a potential Hajj candidate to sit athis or her desk and tour a ritual of Hajj. The Virtual Hajj EnvironmentTraining (VHET) is a computerized training system that allows Hajj can-didates to train for virtual Hajj steps using an immersive virtual-realitysystem. Moreover, in advance stages the VE will be supplied with virtualcrowd and results a high-occupancy Hajj environment in virtual reality.
29

Setyawan Widyarto, Muhammad Shafie Abdul Latiff
Hajj management will be able to learn potential crowd dangers through-out a range of different occupancies without having to physically visit thelocation and preventive effort can be applied.
In case of the skill training systems the user may face an interactivescene. Such a scene contains multiple virtual objects that undergo inter-action and respond with certain behaviours (interaction with VR space).In case of the decision training, we need to bring this idea to the higherlevel: an interactive scenario. Ideally, an interactive scenario should tell atimeline story of pedagogical nature leaving at the same time clear placesfor trainee’s interactions and decisions that affect scenario direction (in-teraction with VR space and time). There are some testimonies that thevirtual world created will help to understand the position and orientation.By this ’pose’ most of them agree that they have been supplied with basicinformation regarding the adaptive behaviour if any emergences happen.
4 Conclusion
Virtual world has some benefits to overcome the real world attributes thathinder people to physically involve wherein real space such as Al-Haram.However, virtual experience is not able to replace real world experience.Therefore, virtual reality is very robust in prior field training but cannotsubstitute real world training.
5 Acknowledgement
The study was partially supported by the Research Management Cen-tre, Universiti Teknologi Malaysia. The authors would like to thank Dr.Abid S Hussain from www.3dkabah.com and Kingdom of Saudi Arabia,Ministry of Islamic Affairs, Endowments, Dawah and Guidance [www.al-islam.com].
References
[1] Ministry of Hajj Kingdom of Saudi Arabia, Hajj and Umrah Statis-tics, http://www.hajinformation.com/main/l.htm
[2] Foley J. M., Interfaces for Advanced Computing, Scientific America,257(4), October 1987.
[3] Chang-Hyun Park, Gilsoo Jang, Young-Ho Chai, Development of aVirtual Reality Training System for Live-Line Workers, InternationalJournal of Human-Computer Interaction, Vol. 20, No. 3: pages 285-303. 2006.
[4] Patrice L. (Tamar) Weiss, Yuval Naveh, Noomi Katz, Design andtesting of a virtual environment to train stroke patients with uni-lateral spatial neglect to cross a street safely, Occupational TherapyInternational, Volume 10, Issue 1, 2003. Pages 39-55
30

Al-Haram Virtual Environment for Training and TourPurposes
[5] Waller, D., E. Hunt, and D. Knapp, The Transfer of Spatial Knowl-edge in Virtual Environment Training. Presence: Tele operators andVirtual Environments, Accepted for publication in 1998.
[6] Witmer, B.G., J.H. Bailey, and B.W. Knerr, Training DismountedSoldiers in Virtual Environments: Route Learning and Transfer.1995, U.S. Army Research Institute for the Behavioural and SocialSciences.
[7] Satelite images Available on line from http://www.globalsecurity.org/military/world/gulf/mecca-imagery.htm
[8] Web 3D Consortium, ”Web3D Specifications: VRML 97, http://www.vrml.org/fs specifications.htm
[9] Barfield W., D. Zeltzer, T. Sheridan, and M. Slater, Presence andPerformance Within Virtual Environments, In Virtual Environmentsand Advanced Interface Design, W. Barfield, T. A. Furness. III,(eds.), Oxford University Press, Oxford, 1995
[10] Wann J. and M. Mon-Williams, What does virtual reality NEED?:human factors issues in the design of three-dimensional computerenvironments, Int. J. Human-Computer Studies, 44, 1996.
[11] Krueger M., Artificial Reality II, Addison Wesley, Wokingham, 1991
[12] Kalawsky R. S., New Methodologies And Technologies For Evalu-ating User Performance, In The 3D Interface For The InformationWorker (IEE), D. F. A. Leevers and I. D. Benests, (eds.), London,1998
31





























