Embed Size (px)
Citation preview

A Hybrid Randomized/Nonlinear Programming Technique For Small Aerial
Vehicle Trajectory Planning in 3D
Patrick M. Bouffard
Electrical Engineering and Computer Sciences
University of California, Berkeley
Steven L. Waslander
Mechanical and Mechatronics Engineering
University of Waterloo
Abstract— The use of small aerial vehicles (SAVs) such asquadrotors for inspection and surveillance applications bothindoors and out is well established, but motion planningtechniques are needed which can be calculated in real-timeand which result in provably safe vehicle motion in tightlyconstrained 3D environments. Applied to small quadrotor he-licopters, our planning algorithm combines Probabilistic RoadMaps (PRMs) with Nonlinear Programming (NLP) to yielddynamically feasible, collision-free trajectories in nontrivial en-vironments. Dynamics are incorporated as equality constraintsin the NLP formulation, using a multiple shooting transcription.A key challenge is collision avoidance, accomplished via NLPinequality constraints. Simulation results for complex (thou-sands of polygons) indoor and cave environments are presented,showing complete plans computed more quickly than they canbe flown.
I. INTRODUCTION
Small Aerial Vehicles (SAVs) such as quadrotors [1] are
becoming increasingly well established for surveillance and
inspection applications, with both outdoor [2] and indoor
[3] flight demonstrated by various research groups. Con-
trol and stability issues for quadrotor platforms have been
largely addressed, as demonstrated by the availability of
turnkey quadrotor systems such as the Aeryon Scout [4] or
the Microdrones GmbH MD4-200 [5]. For such agents to
achieve their ultimate potential as mobile sensor platforms
and/or payload delivery agents, a greater degree of autonomy
will be required. Much of the human intervention required
today for remotely operated vehicles has to do with piloting
to navigate complex environments. This amounts to a path
planning problem if the map is known perfectly in advance,
and its automation would free up the human operator for
more high-level tasks such as defining high-level objectives
or interpreting collected sensor data. Many techniques have
been proposed [6], [7], [8], [9], [10] for this type of mo-
tion planning, with both randomized kinodynamic planning
[11] and nonlinear optimization techniques [12] commonly
implemented.
When the full vehicle dynamics (herein, a 10-state model)
are considered, and with obstacles defined in detail as
would be required in real-world situations (i.e. thousands of
polygons), the parameter space of the problem is enormous.
The advantage of randomized methods is in their rapid
exploration of high dimensional spaces, providing feasi-
ble solutions much more rapidly than optimization based
methods. On the other hand, optimization methods result in
locally optimal control inputs and therefore achieve flyable
and appealing trajectories more easily, whereas randomized
selection of control inputs leads to circuitous paths that can
be far from distance or time optimal. The complementarity
of these approaches suggests the use of a hybrid algorithm,
and indeed this approach has been demonstrated [6] to
find solutions with improved computational complexity over
pure optimization techniques and improved optimality of the
solution over randomized planners alone.
Our approach seeks to build on the existing results from
[6] to ensure safe and efficient operation in known 3D
environments by combining PRMs [13] and NLP [14] to
create locally optimal plans with predetermined safe end
points. The PRM focuses on searching the 3D environment
for connectivity of the free space, while NLP focuses on
satisfying kinodynamic constraints and short horizon cost
metrics. The nonlinear optimization is performed with a fixed
time horizon, and seeks to minimize control action with a
trajectory derived from the shortest path determined from the
PRM. The planner maintains at all times a plan that ends at
a safe hover condition, thereby ensuring that the vehicle can
safely pause while further planning is performed.
Incorporating collision avoidance constraints without re-
stricting the nature of the environment is challenging due
to the nonsmooth nature of the proximity function, and
integrating this into the NLP solver framework presents
some additional technical challenges. We address this by
leveraging available research tools for proximity queries, and
with a special distance heuristic to deal with the solution
behaviour under certain circumstances.
II. PROBLEM FORMULATION
This section describes in greater detail the problem at
hand. First, the formulation of the models of environment
and vehicle are detailed. Then the path planning problem is
described in detail.
A. Vehicle Model
In a quadrotor helicopter the four equal-sized rotors are
controlled independently to generate net forces and moments
that allow all maneuvering to be accomplished. For example,
63
Iros 2009 3rd Workshop: Planning, Perception and Navigation for Intelligent Vehicles

(a) (b)
Fig. 1: A quadrotor helicopter develops attitude control
torques such as roll or pitch (a) and yaw (b) by varying
thrust at each rotor.
ϕ
θ
��
��
��
��
� �
Fig. 2: Schematic top view of quadrotor vehicle, showing
inertial and body frame axes.
to climb, all four rotors would increase their speed together
to impart a net upward force on the vehicle, accelerating it
skywards. The quadrotor can move laterally by varying the
thrust between opposing pairs of rotors, as illustrated in Fig.
1. This changes the attitude from level, creating a lateral
component of the overall thrust vector which will accelerate
the vehicle sideways.
Referring to Fig. 2, the position of the aircraft is described
by the vector r = (x, y, z) ∈ R3 from an inertial frame
{xI,yI, zI} to the c.g. of the vehicle. Define body-fixed
axes {xB,yB, zB} with origin at the c.g. of the vehicle. The
aircraft’s attitude is then described by Euler angles {φ, θ, ψ}which are referred to as roll, pitch and yaw respectively.
Forward flight is in the xB direction. Roll φ is defined as
rotation about the xB axis, pitch θ as rotation about the yB
axis. Yaw (not shown) is rotation about the zB axis, which
is perpendicular to xB and yB by the right hand rule. For
simplicity in this paper ψ is kept constant. Let flight in the xI
direction be called ’forward’, in the yI direction ’starboard’,
and so on. More precisely, a negative pitch angle θ will tilt
the thrust vector forward, and result in forward acceleration.
A positive roll angle φ will likewise result in acceleration to
starboard.
Note that as the thrust vector is tilted away from the
vertical, some of the thrust is no longer opposing gravity and
the vehicle will lose altitude if this is not compensated for
with an appropriate increase in the speeds of all the rotors.
There are also important nonlinear aerodynamic effects,
particularly at higher flight velocities [1], which we do not
consider in this paper.
The state vector y ⊂ R10 is therefore,
y = (x, y, z, vx, vy, vz, θ, φ, ψ, T )
where x, y, z ∈ R are the components of position,
vx, vy, vz ∈ R are translational velocities, θ, φ, ψ ∈ (−π, π)are pitch, yaw, roll respectively and T ∈ R is the total thrust.
The control input vector u = (uθ, uφ, uT ) ∈ R3 consists
of commanded pitch uθ, commanded roll uφ, and com-
manded thrust uT .
In this paper the roll and pitch attitude dynamics are
modeled as a first-order integrator on each axis, with time
constant τatt = 1.0 s. For simplicity, yaw is held constant
at zero. The total thrust is likewise modeled as a first-order
integrator, with time constant τthr = 0.1 s. The translational
degrees of freedom are modeled as double integrators, with
the vehicle mass being accelerated by the projection of the
total thrust vector, plus a drag term proportional to speed.
dy
dt= f(y,u) =
vx
vy
vz1
m(T sin θ − CDvx)
1
m(T sinφ− CDvy)
1
m(T cosφ cos θ − CDvz −mg)
1
τatt(θ − uθ)
1
τatt(φ− uφ)
01
τthr(uT − T )
(1)
The attitude and thrust states are constrained as follows:
total thrust T ∈ [0, 4(0.8)g]; roll and pitch {φ, θ} ∈[−0.3, 0.3] rad. Values of the various constants are as fol-
lows; acceleration due to gravity g = 9.81 m/s2, coefficient
of drag CD = 0.1 N·s/m and vehicle mass m = 1.826 kg.
B. Environment Model
For collision avoidance, the vehicle’s environment is de-
fined in terms of surfaces that the vehicle’s trajectory must
not intersect. These surfaces are modeled as a set E ={∆k | k ∈ 1, . . . , Ntri} of triangles where each triangle ∆k
denotes a triple of vertices (∆k1,∆k2,∆k3) where ∆kj ∈R
3, j ∈ (1, 2, 3). No other restrictions are placed on the
triangles; the environment model can thus incorporate objects
of any shape, they may be both convex and nonconvex, etc.
Note that in this formulation, it is only the starting
configuration that will effectively determine what is free
space and what is an obstacle.
C. Problem Statement
The problem we would like to solve can be described as
follows. We have an SAV with nonlinear dynamics described
by the vector differential equation y(t) = f(y,u, t). The
vehicle is operating in an environment containing obstacles
defined by E as above which it must avoid. A final time
64
Iros 2009 3rd Workshop: Planning, Perception and Navigation for Intelligent Vehicles
tf and number of timesteps N are selected. A desired
destination state ydest is defined. Note that it is not assumed
that ydest will be reached by tf , only that some amount of
progress will be made towards it, such that the vehicle ends
up in the some final state yf at tf . For safety, yf will be
selected to be in a hover condition, i.e. (vx,vy, vz, φ, θ, ψ)f
=0 and Tf = Th. For each timestep tk, k ∈ {1, . . . , N} there
will be a control input uk which is held constant during the
interval (tk, tk+1]. The problem is then to choose u1, . . . ,uN
so that the vehicle is driven from y0 to yf .
1) Collision avoidance: Collision avoidance is a crucial
part of the motion planning problem. The vehicle is required
to remain a distance dmin or greater from all obstacles. Let
Γ ={
(a, b) | a, b ∈ R3}
be the space of line segments.
Given a particular environment E, define the minimum
distance function, for some reference line segment Lref as
distLref
: Γ → R,
distLref
(Lab) =
{
distα(Lab) if distα(Lab) > 0
−distβ(Lab, Lref ) otherwise
where Lab ∈ Γ is a line segment joining points a and b,distα : Γ → R
+ is a function that represents the closest
distance of Lab to the environment, and distβ : Γ×Γ → R+
is the distance from the midpoint of Lab to the reference
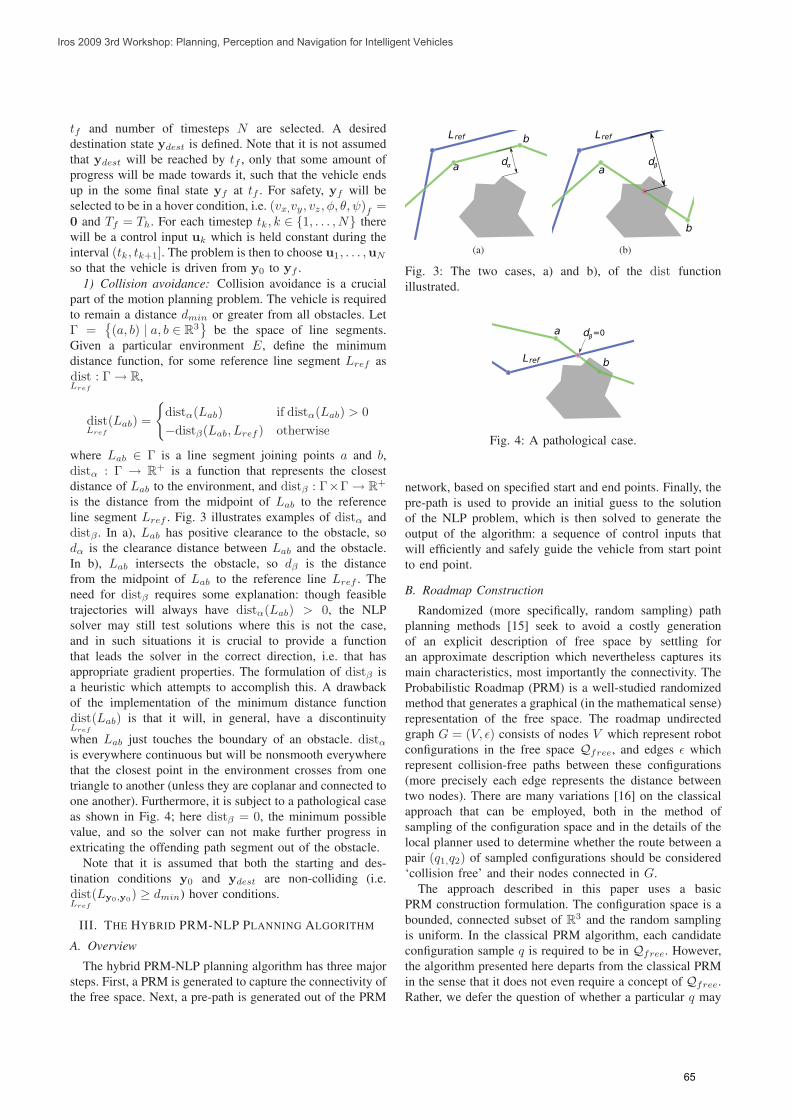
line segment Lref . Fig. 3 illustrates examples of distα and
distβ . In a), Lab has positive clearance to the obstacle, so
dα is the clearance distance between Lab and the obstacle.
In b), Lab intersects the obstacle, so dβ is the distance
from the midpoint of Lab to the reference line Lref . The
need for distβ requires some explanation: though feasible
trajectories will always have distα(Lab) > 0, the NLP
solver may still test solutions where this is not the case,
and in such situations it is crucial to provide a function
that leads the solver in the correct direction, i.e. that has
appropriate gradient properties. The formulation of distβ is
a heuristic which attempts to accomplish this. A drawback
of the implementation of the minimum distance function
distLref
(Lab) is that it will, in general, have a discontinuity
when Lab just touches the boundary of an obstacle. distα
is everywhere continuous but will be nonsmooth everywhere
that the closest point in the environment crosses from one
triangle to another (unless they are coplanar and connected to
one another). Furthermore, it is subject to a pathological case
as shown in Fig. 4; here distβ = 0, the minimum possible
value, and so the solver can not make further progress in
extricating the offending path segment out of the obstacle.
Note that it is assumed that both the starting and des-
tination conditions y0 and ydest are non-colliding (i.e.
distLref
(Ly0,y0) ≥ dmin) hover conditions.
III. THE HYBRID PRM-NLP PLANNING ALGORITHM
A. Overview
The hybrid PRM-NLP planning algorithm has three major
steps. First, a PRM is generated to capture the connectivity of
the free space. Next, a pre-path is generated out of the PRM
�
�����
��
(a)
�
�
����
��
(b)
Fig. 3: The two cases, a) and b), of the dist function
illustrated.
�
�����
����
Fig. 4: A pathological case.
network, based on specified start and end points. Finally, the
pre-path is used to provide an initial guess to the solution
of the NLP problem, which is then solved to generate the
output of the algorithm: a sequence of control inputs that
will efficiently and safely guide the vehicle from start point
to end point.
B. Roadmap Construction
Randomized (more specifically, random sampling) path
planning methods [15] seek to avoid a costly generation
of an explicit description of free space by settling for
an approximate description which nevertheless captures its
main characteristics, most importantly the connectivity. The
Probabilistic Roadmap (PRM) is a well-studied randomized
method that generates a graphical (in the mathematical sense)
representation of the free space. The roadmap undirected
graph G = (V, ε) consists of nodes V which represent robot
configurations in the free space Qfree, and edges ε which
represent collision-free paths between these configurations
(more precisely each edge represents the distance between
two nodes). There are many variations [16] on the classical
approach that can be employed, both in the method of
sampling of the configuration space and in the details of the
local planner used to determine whether the route between a
pair (q1,q2) of sampled configurations should be considered
‘collision free’ and their nodes connected in G.
The approach described in this paper uses a basic
PRM construction formulation. The configuration space is a
bounded, connected subset of R3 and the random sampling
is uniform. In the classical PRM algorithm, each candidate
configuration sample q is required to be in Qfree. However,
the algorithm presented here departs from the classical PRM
in the sense that it does not even require a concept of Qfree.
Rather, we defer the question of whether a particular q may
65
Iros 2009 3rd Workshop: Planning, Perception and Navigation for Intelligent Vehicles

Algorithm 1 Roadmap query refinement
1) Q′′ := {q1}2) a := 13) b := 24) while b < M ′:
5) while distLref
(Lab) > dmin:
6) increment b7) append qb−1 to Q′′
8) a := b− 19) Q′′′ := reverse(Q′′)
10) repeat steps 2-8 with Q′′′ instead of Q′′
11) return reverse(Q′′′)
be part of a feasible plan until a later phase, the query phase.
Indeed, the entire configuration space of the robot, i.e. the 10-
dimensional state space with appropriate constraints, is not
dealt with by the PRM at all; that is the later responsibility
of the NLP.
C. Roadmap Query
In the query phase, A and B are first connected to the
roadmap in the same manner as are the randomly sampled
nodes during the construction phase, as shown in Fig. 5a.
A standard discrete planning shortest path search (using e.g.
Dijkstra’s algorithm [17] or A*[16, p. 37]) is then used to
obtain a pre-path along the roadmap. Note that there is no
guarantee that even the pre-path will exist; if it does not
the algorithm will return FAILURE and the parameters of the
roadmap construction should be revisited.
Next, the roadmap query result is refined to produce a
more direct path from start A to goal B as shown in Fig. 5b.
The refinement uses a simple heuristic to ‘cut corners’ from
the original PRM query result. First, suppose the PRM query
results in a path involving M nodes (start and finish nodes
included). Let Q = {q1, . . . , qM} be the set of nodes returned
by the PRM query; this is the initial pre-path. Note that only
the first 3 components of each q are used; the PRM deals only
with connectivity in the 3D workspace and not with the rest
of the state vector. First Q is subdivided into M ′−1 smaller
line segments each of some small length dincr, to produce
Q′ = {q′1, . . . , q′
M ′}. The algorithm (see Algorithm 1) then
proceeds to examine lines-of-sight (always keeping a margin
of dmin) along the original path, to build up a new pre-path
Q′′ that removes unnecessary deviations into the middle of
free space due to the coarseness of the PRM sampling. This
heuristic is run again with Q′′ reversed to further tighten
the pre-path. The overall effect is something akin to what a
visibility graph technique would produce, along a sequence
of planar regions.
D. NLP
As noted above, the problem to be solved requires de-
termination of a trajectory that will be defined and piece-
wise constant control inputs uk, for k ∈ {1, . . . , N}. In
order to improve the sparsity of the Jacobian and miti-
gate numerical stability issues, intermediate states yk are
�
�
(a)
�
�
(b)
Fig. 5: a) Querying the roadmap to generate the shortest
path from start A to goal B.; b) The roadmap query result
is refined to produce a more direct path.
introduced, following the multiple shooting method [18,
p. 63] of transcribing the optimal control problem to an
NLP. The overall vector of variables of optimization is then
x = [u1, . . . ,uN ,y1, . . . ,yN−1]. For the sake of notation,
let yN = yf , the final state (though note that yN is not
an optimization variable). Since each uk is a 3-vector and
yk a 10-vector, the vector of optimization variables x has
dimension Nopt = 13N − 10. Define the objective (cost)
function f(x) : RNopt → R
+ to be the sum squared of
the control input deviations from the idealized hover control
input uh = [0, 0, Th],
J(x) =1
N
N∑
i=1
(ui − uh)T
W (ui − uh) ,
where the diagonal matrix W = diag(1, 1, 10) provides
weights on the components of the control.
To ensure that the planned trajectory is collision-free, a
vector-valued inequality constraint is constructed, c(x) =(c1(x), . . . , cN (x))
T≤ 0, where each ci(x) = dmin −
distLref,i
(Lab,i). The line segment Lab,i joins yi−1 to yi, and
Lref,i is the reference line segment, to be used when Lab is
in collision with the environment, as described above.
To ensure only a dynamically feasible trajectory is pro-
duced, the aircraft dynamics are used to construct vector-
valued equality constraints hi(x) for each timestep,
hi(x) = yi−1 − yi +
tiˆ
t=ti−1
f(y,ui)dt = 0,
∀i ∈ {1, . . . , N}
Finally, simple upper and lower bounds are also put on
the control and state variables, so that ymin ≤ yi ≤ymax,umin ≤ ui ≤ umax∀i ∈ {1, . . . , N}, or more
compactly, xmin ≤ x ≤ xmax.The NLP optimization problem is therefore,
Nonlinear Program Minimization
minimize J(x)subject to c(x) ≤ 0
h(x) = 0
xmin ≤ x ≤ xmax
(2)
66
Iros 2009 3rd Workshop: Planning, Perception and Navigation for Intelligent Vehicles

Scenario Ntri PRM Nodes N tf
SIMPLE 256 200 10 40 s
MAZE 1238 500 18 76 s
TWOSTOREY 2301 500 22 88 s
CAVE 65536 250 10 40 s
TABLE I: Test scenarios
IV. SIMULATION RESULTS
A. Implementation
The hybrid PRM-NLP algorithm was implemented in
software, with the major components readily available as
free software. The most critical of these are the proximity
measurement, for which the Proximity Query Package (PQP)
[19], [20] was used. The use of a dedicated proximity
checker like PQP is critical to avoid that intractability that
would arise if the collision constraints were instead encoded
directly in the NLP; this would add thousands of additional
constraints at each timestep and would also require the
inclusion of binary variables, greatly increasing the problem
complexity. To solve the NLP problem, the IPOPT (Interior
Point Optimizer) [21] solver from the COIN-OR project was
used. Several freely available libraries were also used, for
integration of the dynamics, performing the discrete shortest-
path query, and so on. Notably, the Panda3D library [22] was
indispensable in creating a flexible framework for simulation
development. The main program code was written in Python.
B. Preliminary Results
Several different environments were modeled and the
algorithm was tested in each. Times noted in this section
are CPU time as recorded on a ThinkPad T400 with a 2.8
GHz Intel Core 2 Duo CPU. The scenarios are intended
to be somewhat representative of various indoor navigation
situations. Here, some results for four different scenarios are
presented. They are called SIMPLE, MAZE, TWOSTOREY, and
CAVE. Table I summarizes each in terms of the number Ntri
of triangles in the environment, the number of PRM nodes
used, number of timesteps N , and final time tf .
Each scenario was tested several times to establish prelim-
inary performance of the algorithm. In general, the algorithm
reliably finds a feasible path from start to finish in all the test
scenarios, though no solution guarantees can be made due to
the discontinuity of the distance heuristic. The discontinuous
nature of the distance heuristic does not appear to have
prevented good solutions to be obtained in the present work
in most cases. The notable exception is TWOSTOREY, where
a large proportion of the trials resulted in the trial trajectory
becoming ’stuck’ crossing a wall (this also occurred to
a lesser degree with MAZE). However, a better heuristic
could be formulated to ensure continuity of this important
NLP constraint and perhaps improve the overall performance
(shorter solution times and/or higher likelihood of finding a
feasible solution). Table II shows timings (time to construct
PRM, number of solver iterations required and solver CPU
time used, as well as ratio of CPU time to simulated flying
time) gathered for 10 successful runs for each scenario.
Scenario Construction Solver Iter. CPU RT Ratio
SIMPLE 5.49 s 9.2 25.93 s 0.48
MAZE 22.89 s 10.8 62.52 s 0.72
TWOSTOREY 25.26 s 13.1 86.97 s 0.86
CAVE 9.46 s 8.0 27.37 s 0.59
TABLE II: Algorithm timing results
(a)
(b)
Fig. 6: Typical results for a) SIMPLE and b) MAZE.
Note that the PRM density was selected by trial-and-error
to ensure connectivity. Still, in some runs the PRM did not
succeed in finding sufficient free space connectivity to allow
a path from start to finish to be produced. In practice this
could be improved by increasing the PRM density a priori,
or by adaptively increasing the PRM density in response
to failed PRM queries until either a path can be found or
some number of iterations is exceeded. For most cases, where
the PRM roadmap did succeed in finding a path, the solver
was able to output a flyable trajectory in less time than the
trajectory would take to fly. Fig. 7 illustrates the typical result
for two of the scenarios.
V. CONCLUSIONS AND FUTURE WORK
The results show that the combined PRM-NLP motion
planning algorithm is a promising method of generating safe,
67
Iros 2009 3rd Workshop: Planning, Perception and Navigation for Intelligent Vehicles

(a)
(b)
Fig. 7: Typical results for a) TWOSTOREY and b) CAVE.
flyable trajectories for SAVs. By combining the ability of
PRMs to rapidly explore free space and find connectivity, and
the capability of an NLP solver to generate locally optimal
solution trajectories, the hybrid PRM-NLP algorithm suc-
ceeds in finding safe and flyable trajectories in a reasonable
amount of time even for relatively complex environments.
The planner has been shown to be capable, on a commodity
laptop, of generating plans in less CPU time than the time
length of the plans themselves. This suggests that a receding-
horizon planner could be created and run in real-time.
The algorithm could benefit from a heuristic improving
upon the distβ function described herein, which could reduce
the incidence of the solver becoming ‘stuck’ in environments
where this is an issue. The solver typically spends the first
few iterations to go from the initial guess to a point where
one might consider the ‘true’ optimization is happening.
Thus a better initial guess could improve performance by a
significant amount; existing algorithms that could track the
pre-path would be a good starting point. A minimum time
or maximum distance in fixed time variant could also be of
practical benefit. Also, both the PRM construction and the
solution of the multiple shooting formulation are inherently
parallel and thus naturally suggest a parallel processing im-
plementation. Finally, implementation onboard a real vehicle
such as the Stanford Testbed of Autonomous Rotorcraft for
Multi Agent Control (STARMAC) quadrotor [1] as part of
a larger receding horizon based control framework would
allow such a platform to autonomously formulate plans in
complex indoor or outdoor environments.
REFERENCES
[1] G. M. Hoffmann, H. Huang, S. L. Waslander, and C. J. Tomlin,“Quadrotor helicopter flight dynamics and control: Theory and experi-ment,” in Proceedings of the AIAA Guidance, Navigation, and Control
Conference and Exhibit, (Hilton Head, SC), Aug. 2007.[2] R. R. Murphy, K. S. Pratt, and J. L. Burke, “Crew roles and operational
protocols for Rotary-Wing Micro-UAVs in close urban environments,”in HRI ’08: Proceedings of the 3rd ACM/IEEE International Confer-
ence on Human Robot Interaction, (New York, NY, USA), pp. 73–80,ACM, 2008.
[3] J. Zufferey, A. Beyeler, and D. Floreano, “Near-obstacle flight withsmall UAVs,” in UAV’2008: International Symposium on Unmanned
Aerial Vehicles, June 2008.[4] “Aeryon scout.” http://www.aeryon.com/products/scout.html. Last ac-
cessed by the authors on 15 July 2009.[5] “MD4-200.” http://www.microdrones.com/en_md4-200.php. Last ac-
cessed by the authors on 15 July 2009.[6] T. Karatas and F. Bullo, “Randomized searches and nonlinear pro-
gramming in trajectory planning,” in Proceedings of the 40th IEEE
Conference on Decision and Control, (Orlando, FL, USA), 2001.[7] M. Vitus, V. Pradeep, G. M. Hoffmann, S. L. Waslander, and C. J.
Tomlin, “Tunnel-MILP: path planning with sequential convex poly-topes,” in Proceedings of the 2008 AIAA Guidance, Navigation and
Control Conference and Exhibit, (Honolulu, Hawaii, USA), Aug. 2008.[8] J. Bellingham, A. Richards, and J. How, “Receding horizon control
of autonomous aerial vehicles,” in Proceedings of the 2002 American
Control Conference, vol. 5, pp. 3741–3746, 2002.[9] Y. Kuwata, G. A. Fiore, J. Teo, E. Frazzoli, and J. How, “Motion
planning for urban driving using RRT,” in Proceedings of the 2008
IEEE/RSJ International Conference on Intelligent Robots and Systems,pp. 1681–1686, 2008.
[10] Y. Kuwata and J. How, “Three dimensional receding horizon controlfor UAVs,” (Providence, Rhode Island), Aug. 2004.
[11] J. Barraquand, L. Kavraki, J. Latombe, T. Li, R. Motwani, andP. Raghavan, “A random sampling scheme for path planning,” The
International Journal of Robotics Research, vol. 16, no. 6, pp. 759–774, 1997.
[12] A. Richards and J. How, “Aircraft trajectory planning with collisionavoidance using mixed integer linear programming,” in Proceedings of
the 2002 American Control Conference, vol. 3, pp. 1936–1941, 2002.[13] L. E. Kavraki, P. Svestka, J. Latombe, and M. H. Overmars, “Proba-
bilistic roadmaps for path planning in High-Dimensional configurationspaces,” IEEE Transactions on Robotics and Automation, vol. 12,pp. 566–580, Aug. 1996.
[14] D. Bertsekas, Nonlinear Programming. Belmont, WA: Athena Scien-tific, 1995.
[15] J. Latombe, “Motion planning: A journey of robots, molecules, digitalactors, and other artifacts,” The International Journal of Robotics
Research, vol. 18, no. 11, pp. 1119–1128, 1999.[16] S. M. LaValle, Planning Algorithms. Cambridge University Press,
2006.[17] E. W. Dijkstra, “A note on two problems in connexion with graphs,”
Numerische Mathematik, vol. 1, no. 1, pp. 269–271, 1959.[18] J. T. Betts, Practical Methods for Optimal Control Using Nonlinear
Programming. 2001.[19] E. Larsen, S. Gottschalk, M. C. Lin, and D. Manocha, “Fast prox-
imity queries with swept sphere volumes,” Technical Report 99-018,Department of Computer Science, University of N. Carolina, ChapelHill, NC, 1999.
[20] S. Gottschalk, M. Lin, D. Manocha, and E. Larsen, “PQP - aproximity query package.” http://www.cs.unc.edu/~geom/SSV/, 1999.Last accessed by the authors on 15 July 2009. Version 1.3.
[21] A. Wachter and L. T. Biegler, “On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear program-ming,” Mathematical Programming, vol. 106, pp. 25–57, Mar. 2006.
[22] M. Goslin and M. R. Mine, “The Panda3D graphics engine,” Com-
puter, vol. 37, pp. 112–114, Oct. 2004.
68
Iros 2009 3rd Workshop: Planning, Perception and Navigation for Intelligent Vehicles





























