Embed Size (px)
Citation preview

1
PROJECT REPORT
Relativistic Effect in GPS Satellite and
Computation of Time Error
REGISTERED UNDER
Prof. Ralph Samuel Thanraraj
School of Electronics and Communication
Engineering
Satellite
Communication
ECE 405
SUBMITTED BY:
KARTHIK M 11BEC1010
KAMLESH VERMA 11BEC1017
VEDANT KUMAR 11BEC1033
SHESHADRI SRINIVAS RAO 11BEC1076
HARSH PRATEEK 11BEC1111
VAIBHAV ANAND PERMAR 11BEC1131

2
Table of Content
ABSTRACT…………………………………………………………………………………3
ABBREVIATIONS AND ACRONYMS…..……………………………………………..4
Introduction……………………………………………………………………………….5
Theory………………………………………………………………………………………6
SIMULATION……………………………………………………………………………..14
a) MATLAB CODE………………………………………………………………………17
b) Simulink
c) System Tool Kit (STK) Software
PLOTS………………………………………………………………………………………19
Functions Definition…………………………………………………………………….21
Conclusion………………………………………………………………………………..22
Reference…………………………………………………………………………………..23

3
ABSTRACT
The satellites are the integral part of our life. In current scenario, our planet is covered with
thousands of satellites. These satellites covers every aspect of communication like- navigation,
telecommunication, television broadcasting, satellite imaginary, military communications,
Space Station, Earth's weather and climate etc. The small time delay in clock implemented in
satellites cause large delay in propagating signal and it leads to tremendous loss in
communication. This Project basically deals with detection and computation of time error on
satellite clock due to relativistic effect. The time delay is based on both special and general
relativity postulated by Albert Einstein in 1905 and 1915. The detection and computation had
been done by presenting the simulations in the MATLAB environment. The focus of project is
specially GPS satellites due to the need of better and reliable navigation system in current
scenario. Using the Simulink Environment in MATLAB a P code and C/A code have generated
and tested. These code contains timing signal and synchronization signal for GPS satellites.
Synchronizing time with precise time calculation on GPS receivers, system simulation in
MATLAB from GPS satellite transmitter to receiver will be discussed here. The atomic clock
is also discussed here which is used to measure the time delay with high level of precision
(around 10 nano-second) in satellites. Satellite Tool Kit (STK) Software a package
from Analytical Graphics, Inc. is also used in the project to model the satellite and its orbit
around the planet earth. It provides very high graphics simulation and modelling. It allows
engineers and scientists to perform complex analyses of all the physical parameters necessary
for satellite designing and communication.

4
ABBREVIATIONS AND ACRONYMS
G.P.S- Global Positioning System
C/A Code- The Standard (Coarse/Acquisition) GPS PRN code, also known as the
Civilian Code.
P Code- Precision Code
L1- GPS carrier frequency contains C/A code, encrypted P code and the Navigation
Message
L2- 1227.60 MHZ (2x60x10.23MHz) for transmitting P-Code and the new code
named L2C
NAV- Navigation
PRN- Pseudo Random Noise
UTC- Universal Time Coordinate
STK- Satellite Toolkit

5
INTRODUCTION
The Global Position System (GPS) consists of 24 earth-orbiting satellites, each carrying
accurate, stable atomic clocks. Four satellites are in each of six different orbital planes, of
inclination 55 degrees with respect to earth's equator. Each satellite in the GPS constellation
orbits at an altitude of about 20,000 km from the ground, and has an orbital speed of about
14,000 km/hour. Each satellite carries with it an atomic clock that "ticks" with an accuracy of
1 nanosecond. A GPS receiver in an airplane determines its current position and heading by
comparing the time signals it receives from a number of the GPS satellites (usually 6 to 12)
and triangulating on the known positions of each satellite. The precision is phenomenal: even
a simple hand-held GPS receiver can determine your absolute position on the surface of the
Earth to within 5 to 10 meters in only a few seconds. To achieve this level of precision, the
clock ticks from the GPS satellites must be known to an accuracy of 20-30 nanoseconds.
However, because the satellites are constantly moving relative to observers on the Earth, effects
predicted by the Special and General theories of Relativity must be taken into account to
achieve the desired 20-30 nanosecond accuracy. Special Relativity predicts that the on-board
atomic clocks on the satellites should fall behind clocks on the ground by about 7 microseconds
per day because of the slower ticking rate due to the time dilation effect of their relative motion.
A prediction of General Relativity is that clocks closer to a massive object will seem to tick
more slowly than those located further away in accordance with variation in space-time
continuum.
A calculation using General Relativity predicts that the clocks in each GPS satellite should get
ahead of ground-based clocks by 45 microseconds per day. The combination of these two
relativistic effects means that the clocks on-board each satellite should tick faster than identical
clocks on the ground by about 38 microseconds per day (45-7=38)! This sounds small, but the
high-precision required of the GPS system requires nanosecond accuracy, and 38 microseconds
is 38,000 nanoseconds. If these effects were not properly taken into account, a navigational fix
based on the GPS constellation would be false after only 2 minutes, and errors in global
positions would continue to accumulate at a rate of about 10 kilometres each day! To counteract
the General Relativistic effect once on orbit, they slowed down the ticking frequency of the
atomic clocks before they were launched so that once they were in their proper orbit stations
their clocks would appear to tick at the correct rate as compared to the reference atomic clocks
at the GPS ground stations. Further, each GPS receiver has built into it a microcomputer that
(among other things) performs the necessary relativistic calculations when determining the
user's location.

6
Theory
1) Relativistic Corrections for the GPS Satellite
The first effect considered stems from a Lorentz transformation for inertial reference frames.
This effect from special relativity is derived from the postulate that the speed of light is constant
in all inertial reference frames [Lorentz et. al., 1923]. The correction accounts for time dilation,
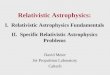
i.e. moving clocks beat slower than clocks at rest. A standard example is as follows. Consider
a train moving at velocity v along the x axis. A light pulse is emitted from one side of the train
and reflects against a mirror hung on the opposite wall. The light pulse is then received and
the round trip time recorded. If the train car has width w (see Fig. 1.1), then the round trip time
according to an observer on the train is:
Where c is the speed of light. Now consider an observer that is stationary with respect to the
train tracks. The train has moved a distance vt track between emit and receive times according
to this track observer's clock. Thus, the total time elapsed in the stationary frame is given by
the following relation:
This yields:
Implicit in this derivation is the assumption that the speed of light is the same in both reference
frames. This is one of Einstein's postulates and was verified by the Michelson-Morley
experiment. Thus, the moving clock beats slower than the stationary clock as measured by a
stationary observer:

7
Light Pulse Emit/Receive
Light Pulse Experiment as Observed on Board the Train
Mirror (at time of reflection)
Light Pulse Experiment as Viewed by a Stationary Observer
Figure. 1.1
Mirror
w
w
v
Emit Pulse Receive Pulse

8
Using a binomial expansion and omitting the higher order terms:
This represents one clock correction term that must be applied for GPS satellites. The clocks
in orbit experience time dilation and must therefore be adjusted in order to maintain agreement
with clocks on the surface of the Earth. The orbital velocity of the GPS satellite is determined
from Kepler's Third Law:
Where
a = 26561.75 km, the semi-major axis of the GPS orbit
GM = 3.986005 x 10^14 m^3/s^2, the Earth gravitational constant
T is the orbital period (seconds)
From this we find that T = 43,082 s. Assuming circular orbits the satellite velocity is:
Now the clock drift due to time dilation is calculated as:
In one day this drift would cause a clock offset of -7.2 µs.
Another correction must be made to account for the height of the GPS satellites above
the surface of the Earth. With an orbital altitude of about 20,200 km the satellite clock
experiences a gravitational potential that is significantly different from that experienced by a
clock located on the surface of the Earth. This causes a gravitational frequency shift in the
GPS carrier as the signal travels from the satellite to an antenna on or near the surface of the

9
Earth. The result is that the satellite clock appears to run faster to an observer on the Earth than
it would to an observer at the satellite. If the Earth is considered to be spherically symmetric,
the gravitational potential N(r) can be approximated as:
where r is the radial distance from the center of the Earth. The gravitational effect is thus:
Where:
R = 6,378 km, the equatorial radius of the Earth e
h = 20,184 km, the altitude of the GPS satellite
This clock drift accumulates to 45.6 µs after one day.
The combination of gravitational frequency shift and time dilation results in a satellite clock
drift for observers on the Earth:
Where:
tau is proper time of the clock carried by the GPS satellite
t is coordinate time in the inertial reference frame
del phi is the gravitational term
v is the satellite velocity
c is the speed of light
The combined effect is a drift of 4.45 x 10 s/s which would cause a clock offset of 38.4 µs after
-10 one day. Therefore, the satellite clocks are tuned so that the observed frequency on Earth
is 10.23 MHz

10
2) Time Synchronizing Signal by GPS Satellites
Two different carrier signals have been used in GPS satellites for transmitting information:
L1 with 1575.42 MHZ frequency (2x77x10.23 MHz) for transmitting the Navigation
Message, C/A and P Code, L2 with 1227.60 MHZ (2x60x10.23MHz) for transmitting P-
Code and the new code named L2C for estimating the ionosphere delay using modelling
parameters. These codes are broadcasted to the receivers in navigation message. In General,
GPS satellites transmit three types of information
Almanac:
Almanac data is course orbital parameters. Each SV broadcasts Almanac data for all SVs.
This Almanac data is not very precise and is considered valid for up to several months.
Almanac data consists of healthy or faulty, current time and date. This information is
essential for precise position calculation. From the almanac data GPS receiver identifies the
satellites that are likely to be received from the actual position. Receiver limits its search to
these previously defined satellites and hence this accelerates the position determination.
Ephemeris: Ephemeris data is very precise orbital and clock correction for each SV and is necessary for
precise positioning. Each SV broadcasts only its own Ephemeris data. This data is valid for
about 30 minutes. The Ephemeris data is broadcasted by each SV every 30 seconds.
Timing Information
C/A Code:
The Coarse / Acquisition code or C/A is a 1,023 bit long pseudorandom code. It is broadcasted
at 1.023 MHz frequency and modulates the L1 signal in phase for generating the
widespread spectrum. C/A code is repeated every millisecond. Each satellite sends a distinct
C/A code, which allows it to be uniquely identified.
P-code:
Usually reserved for military applications. The P-code is a similar code to C/A. It is
broadcasted at 10.23 MHz and it repeats only once a week. In normal operation, the so-called
"anti-spoofing mode", the P code is first encrypted into the Y-code, or P(Y), which can only
be decrypted by units with a valid decryption key. P code modulates L1 and L2 carriers in
phase. Navigation Message modulates L1 and C/A codes. 50 bytes/sec Navigation message
Data is combined with both the C/A code and P(Y) code prior to modulation with the
L1 carrier. This combination uses the XOR process. Since C/A code XOR Data and P(Y) code
XOR Data is synchronous operation, the bit transition rate cannot exceed the chipping rate of
the PRN codes. The L2 frequency can be modulated by either P(Y) code XOR Data or C/A
code XOR Data or with P(Y) code alone as selected by the control segment. P(Y) code and
C/A codes are never present simultaneously on L2, as is the case with L1. In general, P(Y)
code XOR Data is the one selected by the control segment. Navigation message Data gives

11
information about the satellite's orbits, their clock corrections and other system status. The
P(Y)-code XOR Data is modulated in-phase quadrature with the C/A-code XOR Data.
Fig. 1.2.a
C/A code and navigation message are mixed and modulates with L1 carrier in QPSK
modulator making the GPS satellite signal.
Figure: 1.2.b

12
3) Atomic clock
An atomic clock is a clock device that uses an electronic transition frequency in
the microwave, optical, or ultra violet region of the electromagnetic spectrum of atoms as
a frequency standard for its timekeeping element. Atomic clocks are the most
accurate time and frequency standards known, and are used as primary standards for
international time distribution services, to control the wave frequency of television broadcasts,
and in global navigation satellite systems such as GPS.
The principle of operation of an atomic clock is not based on nuclear physics, but rather
on atomic physics and using the microwave signal that electrons in atoms emit when they
change energy levels. Early atomic clocks were based on masers at room temperature.
Currently, the most accurate atomic clocks first cool the atoms to near absolute zero
temperature by slowing them with lasers and probing them in atomic fountains in a microwave-
filled cavity. An example of this is the NIST-F1 atomic clock, one of the U.S.'s national primary
time and frequency standards.
Operational Mechanism of Atomic Clock:
The actual time-reference of an atomic clock consists of an electronic oscillator operating at
microwave frequency. The oscillator is arranged so that its frequency-determining components
include an element that can be controlled by a feedback signal. The feedback signal keeps the
oscillator tuned in resonance with the frequency of the electronic transition of caesium or
rubidium.
The core of the atomic clock is a tuneable microwave cavity containing the gas. In a hydrogen
maser clock the gas emits microwaves (the gas masses) on a hyperfine transition, the field in
the cavity oscillates, and the cavity is tuned for maximum microwave amplitude. Alternatively,
in a caesium or rubidium clock, the beam or gas absorbs microwaves and the cavity contains
an electronic amplifier to make it oscillate. For both types the atoms in the gas are prepared in
one electronic state prior to filling them into the cavity. For the second type the number of
atoms which change electronic state is detected and the cavity is tuned for a maximum of
detected state changes.

13
Figure: 1.3

14
SIMULATION
The simulation and calculation part of relativistic delay has been done in the
MATLAB environment. To generate the P code and C/A Code Simulink has been
used. Last but not least, an orbiting satellite model has been created in Satellite
Toolkit software (STK software).
a) MATLAB CODE
`
%% To compute the delay this program has been written. %% It uses the equation of general relativity and special relativty to
calaculate the delay. %% After giving the input as the radius of orbit it gives the total and
spearte time delay due to relativistic effect.
X=3.98*10^14; c=3*10^8; r=input('radius of orbit in meter'); t=sqrt((4*pi^2*r^3)/X)
v=(2*r*pi)/t %delay due to special relativy St=-(.5*v^2)/(c^2)
%delay due to general relativity
delphi=6.95*10^-14 - X/r
Gt=delphi/(c^2)
%TOTAL DAELY Tt=Gt+St
Output
>> delay
radius of orbit in meter 26000
t =1.3204, v = 1.2372e+05, St =-8.5043e-08, delphi = -1.5308e+10, Gt = -1.7009e-07, Tt =-2.5513e-07

15
b) Simulink
Figure: 1.3.a

16
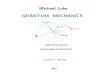
Figure 11 demonstrates the implementation of algorithm in figure 10 from GPS satellite PRN
code generator in GPS transmitter to receiver by MATLAB Simulink toolbox for calculating
the delay time between one GPS satellite and receiver. Different parts of the system shown on
figure 11 from the left side are as follows:
Sampled read with synchronized pulse2: This part generates the Pseudo Random Noise
(PRN) code with 1023 HZ frequency.
Unit delay1 and Unit delay 2 : These parts are for simulating the time delay for
broadcasting the signal from GPS transmitter to receiver, causes by distance between GPS
satellite and receiver,
Modulator QPSK band Base: In this part the PRN code is modulated by QPSK phase
modulation in satellite transmitter.
Channel AWGN: The Gaussian White Noise for considering the noise between GPS
transmitter and receiver is simulated by this part
QPSK Demodulator Baseband2: The Quadra Phase Shift demodulator which demodulates
the signal in GPS receiver to obtain the PRN code in receiver.
Error Rate Calculation: Error Rate calculates the signal difference (error) between PRN
code generated in GPS transmitter with the PRN code demodulates in receiver. Delay and
noise between transmitter and receiver causes the error between these two signals.
Find Delay: The time delay between PRN code in GPS transmitter and receiver signal is
calculated by this part.
Display: This part demonstrates the delay calculated by Find Delay part representing the
time delay in transmitting signal from GPS satellite transmitter to receiver. In this simulation
two delay units are considered for simulating the delay between GPS receiver and transmitter.

17
Outputs:
Figure:1.3.b Figure:1.3.c
Figure: 1.3.d

18
c) Satellite Toolkit
Snapshots of simulation design-
Figure: 1.4.a

19
Figure: 1.4.b
Figure: 1.4.c

20
Figure: 1.4.d
Figure: 1.4.e

21
Figure: 1.4.f

22
Conclusion
We are as human being are restricted to some boundaries and these boundaries are the law of
nature for example, matter can’t travel faster than light, time dilation, variation of gravity in
accordance with space time curvature. Every law in the universe consist of some set of rules
and these rules direct to some limitation. But we engineer can tackle these limits by taking the
alternative. In case of time dilation alternative is atomic clock with resetting synchronization
time signal. The satellites are the integral part of our life. In current scenario, our planet is
covered with thousands of satellites. These satellites covers every aspect of communication
like- navigation, telecommunication, television broadcasting, satellite imaginary, military
communications, Space Station, Earth's weather and climate etc. The small time delay in clock
implemented in satellites cause large delay in propagating signal and it leads to tremendous
loss in communication.

23
Reference
1) Computation of Time Error in GPS Signals: Using Schwartz child Time Dilation
Equation, T.S. Oluwadare, R.R. Dawam, S.A. Achide, Oluwafemi A. Olawale and Y.Y.
Jabil, International Journal of Pure and Applied Sciences and Technology, ISSN 2229
– 6107
2) Time Synchronizing Signal by GPS Satellites, Maryam Sadeghi, Majid Gholami, Dept.
of Electrical Engineering, University of Azad Eslamshahr branch.
3) K. Borre, D. M. Akos, N. Bertelsen, P Rinder and S.H. Jensen, A software defined GPS
and galileo receiver: a single frequency approach, Birkhauser, Boston,Applied and
Numerical Harmonic Analysis Series: XXI, 2007.
4) B.Y. Chung, C. Chien, H. Samueli and R. Jain, Performance analysis of an all-digital
BPSK direct-sequence spread-spectrum IF receiver architecture, IEEE Journal on
Selected Areas in Communications, 11(7) (1997), 1096-1107.
5) Simulations of a Satellite System for Co-Location in Space, Master of Science Thesis
in the Master Degree Programme, Radio and Space Sciences , Syed Zohaib Ali
Department of Earth and Space Sciences, Space Geodesy and Geodynamics Research
Group, CHALMERS UNIVERSITY OF TECHNOLOGY, Göteborg, Sweden, 2013


























![Quantum And Relativistic Protocols For Secure Multi-Party … · arXiv:0911.3814v2 [quant-ph] 1 Mar 2011 Quantum And Relativistic Protocols For Secure Multi-Party Computation RogerColbeck](https://img.dokumen.tips/doc/110x75/600fba562466382d3d4a0d0e/quantum-and-relativistic-protocols-for-secure-multi-party-arxiv09113814v2-quant-ph.jpg)