Embed Size (px)
Citation preview

Intel IoT WebinarTedison: Controlling a Robosapien from Edison
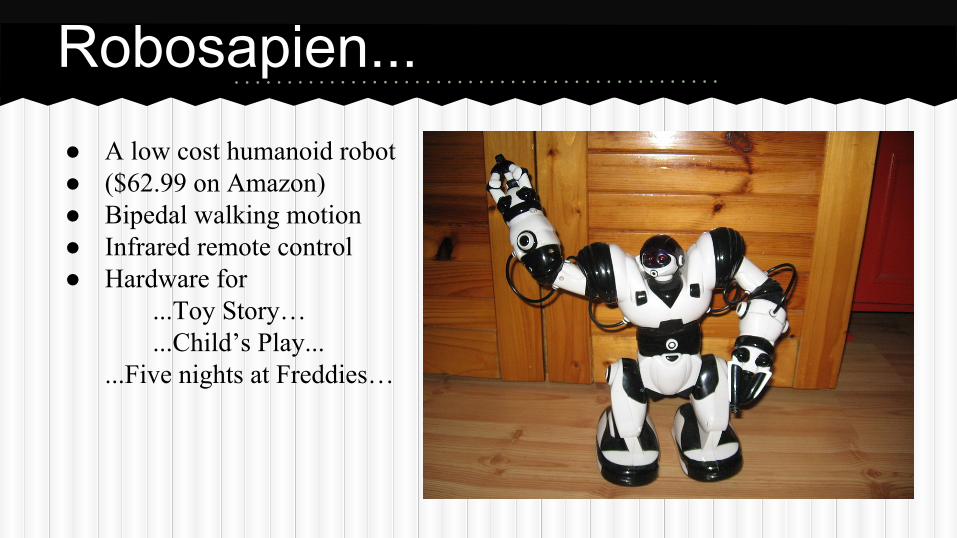
● A low cost humanoid robot● ($62.99 on Amazon)● Bipedal walking motion● Infrared remote control● Hardware for
...Toy Story…...Child’s Play...
...Five nights at Freddies…
Robosapien...

● Robust Teddy Bear● Low cost● Large enough to hold a Robosapien● Stuffing in the head is too heavy, so…● Replace with packing peanuts
Ikea Vandring Bjorn Teddy Bear

● Edison with Arduino breakout board● Could now be done with SparkFun blocks● Keep the packing box as an enclosure!● No packing box● Infrared LED and resistor and jumper wires● NO SOLDER….
Intel Edison

● An “Arduino Sketch” that could never run on an arduino● Communicates using Firebase
○ A realtime cloud database with a REST API. Free for small users○ Backend doesn’t require any coding
● Front end saves a command integer to firebase● Intel Edison retrieves the events in the “arduino” event loop
Software

// the loop routine runs over and over again forever:
void loop() { // wait for a second
int maxfsize=500;
//Retrieve a command system("curl https://blazing-fire-1158.firebaseio.com/robosapien.json > /tmp/robocmd.txt");
char *cmdStr = (char*)malloc(maxfsize + 1);
FILE *lockFile = fopen("/tmp/robolock", "r");
if(!lockFile)
{
FILE *cmdFile = fopen("/tmp/robocmd.txt", "rb");
if(cmdFile)
{
Retreive a command

fseek(cmdFile, 0, SEEK_END);
long fsize = ftell(cmdFile);
if(fsize<3)
{
fclose(cmdFile);
Serial.println("File length too short. Size in bytes is: ");
Serial.println(fsize);
}
else
{
Check the response is valid

fseek(cmdFile, 1, SEEK_SET); //avoid leading quote
fread(cmdStr, fsize, 1, cmdFile);
fclose(cmdFile);
cmdStr[fsize] = 0;
cmdStr[fsize-1] = 0; //delete trailing quote
int cmdInt=atoi(cmdStr);
Serial.println("Command Number");
Serial.println(cmdInt);
Convert the command to an int

if(cmdInt>=0)
{
Serial.println("Executing Command");
sendCommand(cmdInt); //0x88 high5 0x8E fart
Serial.println("Command Executed, erasing command from firebase");
system("curl -X PUT -d '\"-1\"' https://blazing-fire-1158.firebaseio.com/robosapien.json");
Serial.println("Command erased");
}
}
}
}
}
Execute the command

void sendCommand(unsigned char cmdIn)
{
unsigned char cmd=cmdIn;
sendHeader();
for(int i=0; i<8; i++) {
if(cmd&128)
sendOne();
else
sendZero();
cmd=cmd<<1;
}
}
Sending command

void sendHeader()
{
sendPair(headerPulse, headerSpace, waitMS);
};
void sendOne()
{
sendPair(onePulse, oneSpace, waitMS);
};
void sendZero()
{
sendPair(zeroPulse, zeroSpace, waitMS);
};
Sending zeros, ones, headers

//VERY IMPORTANT NOTE delayMicros on an Edison will delay you a minimum of 90MS!!!!
void sendPair(int p, int s, int w){
int targetMicros=micros()+p; int micros2=micros();
while(micros()<targetMicros) { //Modulate at IR frequency for the “ON” pulse
int micros1=micros2;int microsTarget=micros1+w;
digitalWrite(led, HIGH); digitalWrite(boardLED, HIGH);
while((micros2=micros())<microsTarget){} //Waiting by spinning CPU with HIGH LED
int H=micros2-micros1; micros1=micros2;
digitalWrite(led, LOW); digitalWrite(boardLED, LOW);
microsTarget=micros1+w;
while((micros2=micros())<microsTarget){} //Waiting by spinning CPU with LOW LED
}
delayMicroseconds(s); //LED low only for “OFF” pulse
}
IR Modulation











![[Intel Android Webinar Series] Esploriamo Intel XDK, uno strumento incredibile](https://img.dokumen.tips/doc/110x75/559677281a28ab4a498b4656/intel-android-webinar-series-esploriamo-intel-xdk-uno-strumento-incredibile.jpg)

















